matlab电机仿真精华50例
MATLAB中的三相异步电动机仿真
目录前言 (1)1 异步电动机动态数学模型 (2)1.1电压方程 (2)1.2磁链方程 (3)1.3转矩方程 (5)1.4运动方程 (6)2 坐标变化和变换矩阵 (8)2.1三相--两相变换(3/2变换) (8)3 异步电动机仿真 (9)3.1异步电机仿真框图及参数 (9)3.2异步电动机的仿真模型 (11)4 仿真结果 (15)5 结论 (16)参考文献 (17)前言随着电力电子技术与交流电动机的调速和控制理论的迅速发展,使得异步电动机越来越广泛地应用于各个领域的工业生产。
异步电动机的仿真运行状况和用计算机来解决异步电动机控制直接转矩和电机故障分析具有重要意义。
它能显示理论上的变化,当异步电动机正在运行时,提供了直接理论基础的电机直接转矩控制(DTC),并且准确的分析了电气故障。
在过去,通过研究的异步电动机的电机模型建立了三相静止不动的框架。
研究了电压、转矩方程在该模型的功能,同相轴之间的定子、转子的线圈的角度。
θ是时间函数、电压、转矩方程是时变方程这些变量都在这个运动模型中。
这使得很难建立在αβ两相异步电动机的固定框架相关的数学模型。
但是通过坐标变换,建立在αβ两相感应电动机模型框架可以使得固定电压、转矩方程,使数学模型变得简单。
在本篇论文中,我们建立的异步电机仿真模型在固定框架αβ两相同步旋转坐标系下,并给出了仿真结果,表明该模型更加准确地反映了运行中的电动机的实际情况。
1 异步电动机动态数学模型在研究三相异步电动机数学模型时,通常做如下假设 1) 三相绕组对称,磁势沿气隙圆周正弦分布;2) 忽略磁路饱和影响,各绕组的自感和互感都是线性的; 3) 忽略铁芯损耗4) 不考虑温度和频率对电阻的影响异步电机的数学模型由下述电压方程、磁链方程、转矩方程和运动方程组成。
1.1 电压方程三相定子绕组的电压平衡方程为(1-1)与此相应,三相转子绕组折算到定子侧后的电压方程为(1-2)式中 A u , B u , C u , a u , b u ,c u —定子和转子相电压的瞬时值;A i ,B i ,C i , a i , b i ,c i —定子和转子相电流的瞬时值;A ψ,B ψ,C ψ, a ψ, b ψ,c ψ—各相绕组的全磁链; Rs, Rr —定子和转子绕组电阻上述各量都已折算到定子侧,为了简单起见,表示折算的上角标“ ’”均省略,以下同此。
matlab电机仿真

学院:机电学院班级:机自09-2班姓名:谢伟学号:03090943报告关于电机互锁的仿真报告我们要先明确什么叫互锁互锁,说的是几个回路之间,利用某一回路的辅助触点,去控制对方的线圈回路,进行状态保持或功能限制。
一般对象是对其他回路的控制.例如:上图是一个很典型的互锁电路图,实现的功能是电机的正反转,当实现正传的时候,关闭断路器Qs,按下正向按钮SB3,SB3的常闭触点断开,是KM2不工作,SB3的常开触点闭合,是电磁铁KM1得电,线圈KM1吸合实现自锁,电机实现正向转动,同时线圈的常闭触点断开,保证KM2不工作,防止电路短路导致的电路故障,当实现反向转动时,按下反向按钮SB2,SB2的常闭触点断开,KM1不得电,电机无法正向转动,SB2的常开触点闭合,KM2得电,线圈KM2吸合实现自锁,电机实现反向转动,同时线圈KM2 的常闭触点断开,保证KM1不工作。
以上当电机正转时保证电机反转电路断开,反转保证正转电路断开的方法叫作互锁。
利用的是两个常闭辅助触点来实现其功能的。
在实际工作中,由于坏境是变化的,负载也随着环境的变化而变化,为了测试电动机在不同负载环境下的运转情况,我们必须测试一系列不同的或者双向的负载加在电机轴上的电机反应。
此外,一个理想的负载应该回归到发电机从电网上吸收的能量。
这样的负载应该有一个有四象限的DC2或者DC4的直流电产生,这测试的时候应该通过刚性轴这两个电动机进行机械耦合连接。
因此,这个仿真实验需要两个电动机模型,AC4电动机和DC2电动机。
其中,AC4电动机是一个直流三相感应异步电动机,DC2是一个直流单向整流电动机。
在这样的系统里,一个电动机负责速度参数的设定,一个电动机负责力矩参数的设定.同时每个电动机可以充当马达或者发电机。
DC2的额定参数一般是3马力,240伏特,1800转每分钟。
AC4电动机的额定参数是3马力,380伏特,60赫兹,4级。
上图为直流电动机的工作原理图上图为桥式整流电路图注意:对于两个电动机的信号控制可以使用用户界面的最下方的机械输入菜单,下图显示了再马达—发电机结构中如何去模拟刚性轴的互相连接。
直流电机双单闭环反馈MATLAB仿真

MATLAB仿真实验报告班级::学号:转速闭环一电机参数的设置励磁电流取1A,励磁和电枢互感(Field-armature mutual inductance)取0.673H时,电机转速U N=3000r/min。
其余参数如下:二性能指标超调量δ<=5%最大电流Imax=2I N=175A三模型的设计转速反馈系数:α=10/3000=0.0033v.min/r额定转矩计算:Ceφ=(U-I N*Ra)/n=0.0708 T L=9.55CeφIa=59N.M输出限幅:(-10,10)触发角:30~90°则触发角函数为:(90-6*u )电源线电压:U=220*/2.34cos(30°)=110V电流限幅175A 采用设置死区来限幅,死区围(-160,160),反馈系数取0.4 平波电抗器取0.01H 调节器选用P 调节 完整模型如下:nifiav+-Voltage Measurement4v +-Voltage Measurement2v +-Voltage Measurement1v +-Voltage MeasurementgABC+-Universal BridgeNABCThree-Phase Programmable Voltage SourceTealpha_deg AB BC CA BlockpulsesSynchronized 6-Pulse GeneratorStepSeries RLC BranchScope4Saturation0.4Gain40.0033Gain3100Gain29.55Gain1(90-6*u)Fcn Dead ZoneDC Voltage SourceT LmA +F +A -F -dcDC Machine10Constant20Constant1<Speed wm (rad/s)><Armature current ia (A)><Field current if (A)><Electrical torque Te (n m)>四仿真结果与调试①放大倍数取100,额定负载启动,突加负载扰动时仿真结果:转速:电枢电流:②放大倍数取100,额定负载启动,突加电源扰动时仿真结果转速:电枢电流:③放大倍数为100,额定负载启动,控制输入电压变化时仿真结果:转速:电枢电流:五实验结论由于控制器采用P调节,转速无法实现无静差。
直流电机调速matlab仿真报告
直流电机调速matlab仿真报告以直流电机调速Matlab仿真报告为标题引言:直流电机是一种常见的电动机,广泛应用于工业、交通、家电等领域。
在实际应用中,电机的调速控制是一项关键技术,可以使电机在不同工况下实现恒定转速或变速运行。
本文将利用Matlab软件进行直流电机调速的仿真实验,旨在通过仿真结果分析不同调速控制策略的优劣,并提供一种基于Matlab的直流电机调速方法。
一、直流电机调速原理直流电机的调速原理基于电压与转速之间的关系。
电机的转速与输入电压成正比,即在给定电压下,电机转速可以通过调整电压大小来实现调速。
常用的直流电机调速方法有电压调速、电流调速和PWM调速等。
二、Matlab仿真实验设置本次仿真实验将以直流电机调速为目标,基于Matlab软件进行实验设置。
首先,需要建立电机的数学模型,包括电机的转速、电流和电压等参数。
其次,选择合适的调速控制策略,如PID控制、模糊控制或神经网络控制等。
最后,通过调节电压输入,观察电机的转速响应和稳定性。
三、PID控制调速实验1. 实验目的本实验旨在通过PID控制器对直流电机进行调速控制,并分析不同PID参数对控制效果的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计PID控制器,包括比例系数Kp、积分系数Ki和微分系数Kd;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节PID参数,观察电机的转速响应和稳定性。
3. 实验结果与分析根据实验设置,我们分别对比了不同PID参数值下的电机转速响应曲线。
结果显示,在合适的PID参数设置下,电机能够实现快速响应和稳定控制。
但是,过大或过小的PID参数值都会导致转速超调或调速不稳定的问题。
四、模糊控制调速实验1. 实验目的本实验旨在通过模糊控制器对直流电机进行调速控制,并分析不同模糊规则和输入输出的影响。
2. 实验步骤(1) 建立直流电机的数学模型;(2) 设计模糊控制器,包括模糊规则、输入变量和输出变量;(3) 利用Matlab软件进行仿真,设定电机的目标转速和初始转速;(4) 通过调节模糊规则和输入输出变量,观察电机的转速响应和稳定性。
matlabsimulink在电机中的仿真

模块化设计
集成优化工具
Simulink的模块化设计使得电机的各个部 分可以独立建模,然后通过模块的连接来 构建完整的系统模型,便于管理和修改。
Matlab提供了多种优化工具,可以对电机 控制系统进行优化设计,提高系统的性能 。
Matlab Simulink在电机仿真中的挑战
模型复杂度
电机的数学模型通常比较复杂,涉及大 量的非线性方程,这给模型的建立和仿
电机仿真的基本方法和流程
数学建模
根据电机的物理原理, 建立电机的数学模型, 包括电路方程、磁路 方程和运动方程等。
参数识别
根据实际电机的参数, 对数学模型进行参数 识别和调整,提高仿 真的准确性。
建立仿真模型
在Matlab Simulink 中建立电机的仿真模 型,包括电机本体和 控制系统的模型。
验证设计
通过仿真可以验证电机的设计是否满足要求, 提前发现并修正设计中的问题。
性能预测
仿真可以帮助预测电机的性能,包括转速、 转矩、效率等,为实际应用提供参考。
控制系统设计
通过仿真可以验证控制系统的设计是否正确, 提高控制系统的稳定性和精度。
降低成本
仿真可以减少试验次数,降低试验成本,缩 短研发周期。
04
案例分析
直流电机仿真案例
总结词
通过Simulink对直流电机进行仿真,可以模拟电机的启动、调速和制动等过程,为实际应用提供理论依据。
详细描述
在直流电机仿真案例中,我们使用Simulink的电机模块库来构建电机的数学模型。通过设置电机的参数,如电枢 电阻、电枢电感、励磁电阻和励磁电感等,可以模拟电机的动态行为。通过改变输入电压或电流,可以模拟电机 的启动、调速和制动等过程,并观察电机的响应特性。
第7章基于MATLAB的交流电机仿真全篇

7.1电力系统模块集
Simulink中可以使用电力系统仿真模块集 (SimPowerSystems)。其功能非常强大,可 以用于电路、电力电子系统、电机系统、电力 传输等过程的仿真,它提供了一种类似电路建 模的方式进行模型绘制,在仿真前将自动将其 变化成状态方程描述的系统形式,然后才能在 Simulink下进行仿真分析。 该模块集下有许多子模块集,双击每一个图标 都将打开下一级子模块集。
选择该菜单项后将得到下图所示的对话框,可以从中 填写相应的数据,控制仿真过程。
1、仿真区间设置。仿真起始、终了时间设置。 2、类型设置。步长选择:定步长、变步长。 3、仿真算法选择。
定步长算法
变步长算法
1、ode45
它是一种一步算法,对大多数仿真模型来说, 首先使用ode45来解算模型是最佳的选择,所 以在SIMULINK的算法选择中将ode45设为默认 的算法。
例1考虑如图所示的感应电机的等效电路,输入的交流 电L1=压L源2=为1.922260mVH,,50RH2=z1,.5其51它Ω,参R数3=值1为.80R31Ω=0,.4L238=Ω31,.2mH。
步骤:
1、将所需的各电路元件复制到模型编辑窗口中。(对 各元件点击左键并按住拖入即可,对重复的元件可在 编辑窗口中按右键拖动)。
>> [a,b,c,d]=power2sys('ch7ex1')%获得系统的状态方程 a= -128.8763 -844.6462 -121.3833 -896.7868 b= 267.3783 251.8325 c= 0 1.8030 d= 0
Magnitude (dB)
>> G=ss(a,b,c,d);bode(G)%绘制系统的Bode图
MATLAB电机控制综合仿真实验
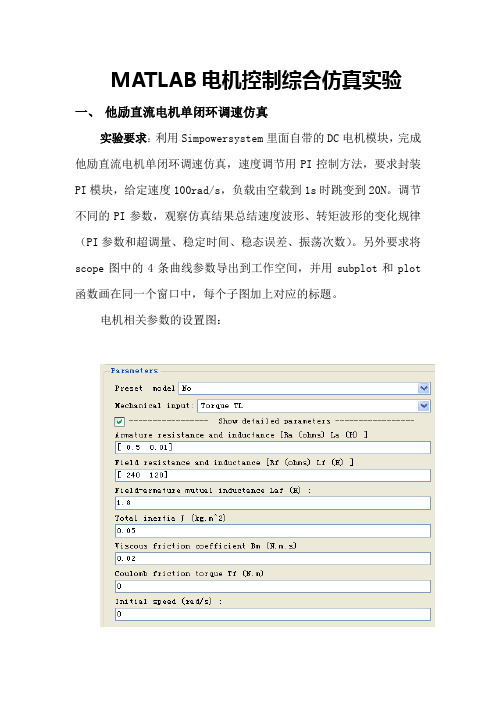
MATLAB电机控制综合仿真实验一、他励直流电机单闭环调速仿真实验要求:利用Simpowersystem里面自带的DC电机模块,完成他励直流电机单闭环调速仿真,速度调节用PI控制方法,要求封装PI模块,给定速度100rad/s,负载由空载到1s时跳变到20N。
调节不同的PI参数,观察仿真结果总结速度波形、转矩波形的变化规律(PI参数和超调量、稳定时间、稳态误差、振荡次数)。
另外要求将scope图中的4条曲线参数导出到工作空间,并用subplot和plot 函数画在同一个窗口中,每个子图加上对应的标题。
电机相关参数的设置图:仿真原理图:在仿真试验中需要按照实验要求对PI控制器子系统进行封装,然后更改Kp、Ki参数值的大小。
封装PI模块图如下:Plot绘图程序:>>subplot(411)>> plot(t,W,'r'),title('转速')>> subplot(412)>> plot(t,Ia,'b'),title('电枢电流')>> subplot(413)>> plot(t,Te,'g'),title('转矩')>> subplot(414)>> plot(t,If,'y'),title('励磁电流')速度调节用PI控制方法,给定速度100rad/s,负载由空载到1s 时跳变到20N,调节不同的PI参数,从PI模块封装中调节,修改不同的参数Ki 、Kp观察仿真结果。
Ki=100, Kp=5;050100w (r a d /s )00.51 1.52 2.53 3.54 4.55-2000200I a (A )-202I f (A )-1000100T e (N .m )Ki=2, Kp=1;w (r a d /s)I a (A)00.51 1.52 2.53 3.54 4.55I f (A)00.51 1.52 2.53 3.54 4.55T e (N .m )二、 他励直流电机闭环调速系统仿真实验要求:利用Simulink 基本模块搭建他励直流电机闭环调速系统直流电机子模块,根据以下电机数学模型搭建:电磁转矩公式:e M a T C I =Φ 动力学平衡方程:e L m d T T B J dtωω--=电机模块要求封装,参数20.05kg m J =⋅,0.02N m s m B =⋅⋅,165m C =,0.01Wb f Φ=,恒定负载T L =20N 点击封装模块时输入。
三相异步电动机Matlab仿真..
三相异步电动机Matlab仿真..中国石油大学胜利学院综合课程设计总结报告题目:三相异步电机直接启动特性实验模型学生姓名:潘伟鹏系别:机械与电气工程系专业年级: 2012级电气工程专业专升本2班指导教师:王铭2013年 6 月 27日一、设计任务与要求普通异步电动机直接起动电流达到额定电流的6--7倍,起动转矩能达到额定转矩的1.25倍以上。
过高的温度、过快的加热速度、过大的温度梯度和电磁力,产生了极大的破坏力,缩短了定子线圈和转子铜条的使用寿命。
但在电网条件和工艺条件允许的情况下,异步电动机也可以直接启动。
本次课程设计通过MATLAB软件建模模拟三相异步电动机直接启动时的各个元器件上的电量变化。
参考:电力系统matlab仿真类书籍电机类教材二、方案设计与论证三相异步电动机直接起动就是利用开关或接触器将电动机的定子绕组直接接到具有额定电压的电网上。
由《电机学》知三相异步电动机的电磁转矩M与直流电动机的电磁转矩有相似的表达形式。
它们都与电机结构(表现为转矩常数)和每级下磁通有关,只不过在三相异步电动机中不再是通过电枢的全部电流,而是点数电流的有功分量。
三相异步电机电磁转矩的表达式为:(1-1)式中——转矩常数——每级下磁通——转子功率因数式(1-1)表明,转子通入电流后,与气隙磁场相互作用产生电磁力,因此,反映了电机中电流、磁场和作用力之间符合左手定则的物理关系,故称为机械特性的物理表达式。
该表达式在分析电磁转矩与磁通、电流之间的关系时非常方便。
从三相异步电动机的转子等值电路可知,(1-2)(1-3)将式(1-2)、(1-3)代入(1-1)得:(1-4)一:我们做如下分析:1.当s=0时,,M=0,说明电动机的理想空载转速为同步转速。
2.当s很小时,有,,说明电磁转矩T近似与s呈线性关系,即随着M的增加,略有下降。
因而,类似直流电动机的机械特性,是一条下倾的直线。
3.当s很大时,有,,说明电磁转矩M近似与s成反比,即M增加时n反而升高。
电力电子技术应用实例MATLAB仿真_图文

目录摘要 (1关键词 (11.引言 (12.单相半波可控整流电路 (1 2.1实验目的 (12.2实验原理 (12.3实验仿真 (23.单相桥式全控整流电路 (8 3.1实验目的 (83.2实验原理 (83.3实验仿真 (94.三相半波可控整流电路 (10 4.1实验目的 (104.2实验原理 (114.3实验仿真 (125. 三相半波有源逆变电路 (14 5.1实验目的 (145.2实验原理 (145.3实验仿真 (156.三相桥式半控整流电路 (176.1 实验目的 (176.2实验原理 (17`6.3 实验仿真 (177.小结 (19致谢 (19电力电子技术应用实例的MATLAB 仿真摘要本文是用MATLAB/SIMULINK 实现电力电子有关电路的计算机仿真的毕业设计。
论文给出了单相半波可控整流电路、单相桥式全控整流电路、三相半波可控整流电路、三相半波有源逆变电路、三相桥式全控整流电路的实验原理图、MATLAB 系统模型图、及仿真结果图。
实验过程和结果都表明:MATLAB 在电力电子有关电路计算机仿真上的应用是十分广泛的。
尤其是电力系统工具箱-Power System Blockset (PSB 使得电力系统的仿真更加方便。
关键词 MATLAB SIMULINK PSB 电力电子相关电路1.引言MATLAB 是由Math Works 公司出版发行的数学计算软件,为了准确建立系统模型和进行仿真分析,Math Works 在MATLAB 中提供了系统模型图形输入与仿真工具一SIMULINK 。
其有两个明显功能:仿真与连接,即通过鼠标在模型窗口画出所系统的模型,然后可直接对系统仿真。
这种做法使一个复杂系统模型建立和仿真变得十分容易。
[4][2]在1998年,MathWoIks 推出了电力系统仿真的电力系统工具箱-Power System Blockset (PSB 。
其中包括了电路仿真所需的各种元件模型,包括有电源模块、基础电路模块、电力电子模块、电机模块、连线器模块、检测模块以及附加功率模块等七种模块库。
34125《电机与拖动基础及MATLAB仿真》陈亚爱(程序代码)书中仿真实例Matlab程序代码

【仿真实例0-1】解:用M语言编写计算励磁电流程序如下:%磁路计算求解励磁电流问题clc%清除主程序窗口clear%清除变量空间的变量A=0.8*1e-3;%已知铁心截面积m2,1e-3表示10-3kFe=0.94;%已知铁心叠片系数Ph=1*1e-3;%需产生的磁通量Wbu0=4*pi*1e-7;%已知空气磁导率H/m,1e-7表示10-7 l1=0.08;l2=0.1;l3=0.034;l4=0.04;l5=0.1;%已知各段磁路长度mN=2000;%已知励磁绕组匝数d=0.006;%已知气隙长度mAk=kFe*A;%计算净截面积m2B=Ph/Ak;%计算铁心磁通密度uFe=1900*u0;%计算铁心磁导率Hc=B/uFe;%计算铁心磁场强度Fc=Hc*(l1+l2+l3+l4+l5);%计算铁心的磁压降Ha=Ph/u0/A;%计算气隙磁场强度Fa=Ha*d;%计算气隙的磁压降F=Fc+Fa;%计算总磁压降i=F/N;%计算励磁电流s=num2str(i);%将数字转换成字符串s1='励磁电流为:';%定义字符串s=strcat(s1,s,'A');%合并字符串disp(s);%显示计算结果程序运行结果为:励磁电流为:3.0827A【仿真实例0-2】解:计算电感系数的公式为L= μ0μr AN2/l,用M语言编写计算电感系数和绘制电感系数与相对磁导率之间关系曲线程序如下:%求解电感系数和绘制L=f(μr)曲线问题clc%清除主程序窗口clear%清除变量空间的变量u0=pi*4e-7;%已知空气磁导率H/m,1e-7表示10-7 N=400;l=0.3;d=0.005;A=8e-4;A0=8e-4;%已知匝数、铁心长度、气隙、截面积R0=d/(u0*A0);%求气隙磁阻for n=1:80;%for循环语句ur(n)=100+(10000-100)*(n-1)/100;%求相对磁导率Rm(n)=l/(ur(n)*u0*A);%求铁心磁阻R=R0+Rm(n);%求计算总磁阻L(n)=N^2/R;%求电感系数end%for循环语句的结束plot(ur,L)%绘制L=f(μr)曲线title('{\itL=f}({\it\mu}_r)关系曲线')%标题'L=f(μr)关系曲线'xlabel('铁心相对磁导率{\it\mu}_r')%设置x坐标标签“铁心相对磁导率μr”ylabel('电感系数{\itL}[H]')%设置y坐标标签“电感系数L[H]”【仿真实例0-3】解:用M语言编写拟合磁化曲线的MATLAB程序如下:%拟合与绘制磁化曲线问题clcclearHdata=[1.38,1.40,1.42,1.44,1.46,1.48,1.50,1.52,1.54,1.56,...1.58,1.60,1.62,1.64,1.66,1.69,1.71,1.74,1.76,1.78,...1.81,1.84,1.86,1.89,1.91,1.94,1.97,2.00,2.03,2.06,...2.10,2.13,2.16,2.20,2.24,2.28,2.32,2.36,2.40,2.45,...2.50,2.55,2.60,2.65,2.70,2.76,2.81,2.87,2.93,2.99,...3.06,3.13,3.19,3.26,3.33,3.41,3.49,3.57,3.65,3.74,...3.83,3.92,4.01,4.11,4.22,4.33,4.44,4.56,4.67,4.80,...4.93,5.07,5.21,5.36,5.52,5.68,5.84,6.00,6.16,6.33,...6.52,6.72,6.94,7.16,7.38,7.62,7.86,8.10,8.36,8.62,...8.90,9.20,9.50,9.80,10.1,10.5,10.9,11.3,11.7,12.1,...12.6,13.1,13.6,14.2,14.8,15.5,16.3,17.1,18.1,19.1,...20.1,21.2,22.4,23.7,25.0,26.7,28.5,30.4,32.6,35.1,...37.8,40.7,43.7,46.8,50.0,53.4,56.8,60.4,64.0,67.8];%磁场强度数据Bdata=0.40:0.01:1.69;%磁感应强度数据len=length(Hdata);%计算数组长度Hmax=Hdata(len);%提取数组最大值a=polyfit(Hdata,Bdata,13);%计算多项式拟合系数a for n=1:151%提取拟合数据Hfit(n)=Hmax*(n-1)/150;Bfit(n)=a(1)*Hfit(n)^13+a(2)*Hfit(n)^12+a(3)*Hfit(n)^11+...a(4)*Hfit(n)^10+a(5)*Hfit(n)^9+a(6)*Hfit(n)^8+a(7)*Hfit(n)^7+...a(8)*Hfit(n)^6+a(9)*Hfit(n)^5+a(10)*Hfit(n)^4+a(11)*Hfit(n)^3+...a(12)*Hfit(n)^2+a(13)*Hfit(n)+a(14);endplot(Hdata,Bdata,'*')%对原数据描点绘图hold on%保持当前坐标轴和图形plot(Hfit,Bfit)%绘制多项式拟合曲线hold on%保持当前坐标轴和图形title('磁化曲线')%标题'磁化曲线'xlabel('{\itH}[A/cm]')%x坐标标签“H[A/cm]”ylabel('{\itB}[T]')%y坐标标签“B[T]”【仿真实例0-4】解:用M语言编写绘制磁化曲线的MATLAB程序如下:%绘制磁化曲线问题clcclearHdata=[43,49,55,61,67,72.5,78,84,90,100,110,...123,137,155,173,192,210,240,300,395,...520,643,800,920,1100,1300,1800];%磁场强度H值Bdata=0.2:0.05:1.50;%磁感应强度B值ydata=0:0.001:1.6;%y坐标0~1.6xdata=interp1(Bdata,Hdata,ydata,'spline');%采用样条插值的方法分析数据plot(Hdata,Bdata,'*');%用'*'描点绘制磁化曲线hold on%保持当前坐标轴和图形plot(xdata,ydata);%绘制x,y坐标hold on%保持当前坐标轴和图形title('磁化曲线')%标题'磁化曲线'xlabel('{\itH}(A/m)')%x坐标标签'H(A/m)'ylabel('{\itB}(T)')%y坐标标签'B(T)'ylim([0,1.80])%y坐标标注0~1.8【仿真实例0-5】解:用M语言编写绘制磁滞回线的MATLAB程序如下:%绘制磁滞回线问题clcclearBdata=[0,0.2,0.4,0.6,0.7,0.8,0.9,1.0,0.95,0.9,0.8,...0.7,0.6,0.4,0.2,0,-0.2,-0.4,-0.6,-0.7,-0.8,...-0.9,-1.0,-0.95,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,0];%磁感应强度基本数据Hdata=[48,52,58,73,85,103,135,193,80,42,2,-18,...-29,-40,-45,-48,-52,-58,-73,-85,-103,-135,...-193,-80,-42,-2,18,29,40,45,48];%磁场强度基本数据plot(Hdata,Bdata)%绘制磁滞回线hold on%保持当前坐标轴和图形title('磁滞回线')%标题'磁滞回线'plot([-250,250],[0,0],'r-')%绘制红色x轴坐标线hold on%保持当前坐标轴和图形plot([0,0],[-1.5,1.5],'r-')%绘制红色y轴坐标线xlabel('{\itH}(A/m)')%x坐标标签'H(A/m)'ylabel('{\itB}(T)')%y坐标标签'B(T)'grid on%显示网格【仿真实例0-6】解:用M语言编写绘制基于【仿真实例0-5】磁滞回线的平均曲线的MATLAB程序如下:%绘制磁滞回线的平均曲线问题clcclearBdata=[-1.0,-0.95,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,...0,0.2,0.4,0.6,0.7,0.8,0.9,1.0,0.95,0.9,0.8,...0.7,0.6,0.4,0.2,0,-0.2,-0.4,-0.6,-0.7,-0.8,-0.9,-1.0];%磁感应强度基本数据Hdata=[-193,-80,-42,-2,18,29,40,45,48,52,58,73,85,...103,135,193,80,42,2,-18,-29,-40,-45,...-48,-52,-58,-73,-85,-103,-135,-193];%磁场强度基本数据plot(Hdata,Bdata,'linewidth',1.5)%绘制磁滞回线hold on%保持当前坐标轴和图形Bdata1=[-1.0,-0.95,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,0,0.2,0.4,0.6,0.7,0.8,0.9,1.0];Hdata1=[-193,-80,-42,-2,18,29,40,45,48,52,58,73,85,103,135,193];Bdata2=[-1.0,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,0,0.2,0.4,0.6,0.7,0.8,0.9,0.95,1.0];Hdata2=[-193,-135,-103,-85,-73,-58,-52,-48,-45,-40,-29,-18,2,42,80,193];%将数据分两组If=-1.0:.05:1.0;%重新设置磁感应强度参数Ean1=spline(Bdata1,Hdata1,If);Ean2=spline(Bdata2,Hdata2,If);%根据两组数据求If对应的样条差值plot((Ean1+Ean2)/2,If,':','linewidth',1.5)%绘制平均值曲线hold on%保持当前坐标轴和图形title('磁滞回线的平均曲线')%标题'磁滞回线的平均曲线'plot([-250,250],[0,0],'r-')%绘制红色x轴坐标线hold on%保持当前坐标轴和图形plot([0,0],[-1.5,1.5],'r-')%绘制红色y轴坐标线xlabel('{\itH}(A/m)')%x坐标标签'H(A/m)'ylabel('{\itB}(T)')%y坐标标签'B(T)'grid on%显示网格【仿真实例1-1】解:用M语言编写绘制基本磁化曲线和磁路未饱和的磁化电流曲线的MATLAB程序如下:clcclearBdata=[0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1,1.1,...%磁通密度基本数据1.2,1.3,1.34,1.38,1.41,1.43,1.45,1.47,...1.48,1.49,1.495,1.5,1.55,1.6];Hdata=[5,10,20,25,40,50,60,70,90,110,150,...%磁场强度基本数据200,300,400,500,600,700,800,900,...1000,1100,1200,1700,5000,10000];B=[-Bdata,0,Bdata];%将磁通密度数据扩展为正负值H=[-Hdata,0,Hdata];%将磁场强度数据扩展为正负值B=sort(B);%对磁通密度数据进行排序H=sort(H);%对磁场强度数据进行排序subplot(2,2,1);%将窗口划分2行2列使用第1子窗口Bx=0:0.01:2*pi;%正弦函数自变量从0~2π,间隔0.01 Bsin=1.1*sin(Bx);%计算正弦磁通密度值,幅值为1.1 plot(Bx,Bsin);%绘制磁通密度正弦曲线grid on;%显示网格线xlim([0,2*pi]);%限定横坐标范围为0~2πxlabel('角度{\it\omegat}/rad');%在横坐标上标注'角度ωt/rad'ylabel('磁通密度{\itB}(T)');%在纵坐标上标注'磁通密度B(T)'subplot(2,2,2);%将窗口划分2行2列使用第2子窗口hold on%保持图形plot(H,B,'ro');%用红色'o'绘制原始数据点grid on;%显示网格线xlabel('磁场强度{\itH}/(A/m)');%在横坐标上标注'磁场强度H/(A/m)' ylabel('磁通密度{\itB}(T)');%在纵坐标上标注'磁通密度B(T)'mymodel=fittype('a*sinh(b*x)');%选择sinh为拟合模型opts=fitoptions(mymodel);%初始化设置set(opts,'Robust','LAR','Normalize','Off');%设置使用线性最小二乘法拟合Fit=fit(B',H',mymodel,opts);%拟合bt=B;%拟合曲线临时磁通密度数据ht=Fit.a.*sinh(Fit.b.*bt);%拟合曲线临时磁场强度数据plot(ht,bt);%在原始数据窗口绘制拟合曲线subplot(2,2,4);%将窗口划分2行2列使用第4子窗口hold on;%保持图形MX=1.6;%磁通密度最大值BI1=sin((-MX:0.01:MX)./MX.*pi).*MX;%磁通正弦变化HI1=Fit.a.*Fit.b.*BI1;%拟合曲线映射后的磁场强度XI1=1:length(BI1);%初始化x轴刻度XI1=XI1/length(BI1)*2*pi;%折算到0~2πplot(XI1,HI1);%绘制磁化电流曲线grid on;%显示网格线xlim([0,2*pi]);%限定横坐标显示范围xlabel('角度{\it\omegat}/rad');%在横坐标上标注'角度ωt/rad'ylabel('磁化电流{\itI}/安匝');%在纵坐标上标注'磁化电流I/安匝'【仿真实例1-2】解:用M语言编写绘制基本磁化曲线和磁路未饱和的磁化电流曲线的MATLAB程序如下:clcclearBdata=[0.1,0.2,0.3,0.4,0.5,0.6,0.7,0.8,0.9,1,1.1,...%磁通密度基本数据1.2,1.3,1.34,1.38,1.41,1.43,1.45,1.47,...1.48,1.49,1.495,1.5,1.55,1.6];Hdata=[5,10,20,25,40,50,60,70,90,110,150,...%磁场强度基本数据200,300,400,500,600,700,800,900,...1000,1100,1200,1700,5000,10000];B=[-Bdata,0,Bdata];%将磁通密度数据扩展为正负值H=[-Hdata,0,Hdata];%将磁场强度数据扩展为正负值B=sort(B);%对磁通密度数据进行排序H=sort(H);%对磁场强度数据进行排序subplot(2,2,1);%将窗口划分2行2列使用第1子窗口Bx=0:0.01:2*pi;%正弦函数自变量从0~2π,间隔0.01 Bsin=1.5*sin(Bx);%计算正弦磁通密度值,幅值为1.5 plot(Bx,Bsin);%绘制磁通密度正弦曲线grid on;%显示网格线xlim([0,2*pi]);%限定横坐标范围为0~2πxlabel('角度{\it\omegat}/rad');%在横坐标上标注'角度ωt/rad'ylabel('磁通密度{\itB}(T)');%在纵坐标上标注'磁通密度B(T)'subplot(2,2,2);%将窗口划分2行2列使用第2子窗口hold on%保持图形plot(H,B,'ro');%用红色'o'绘制原始数据点grid on;%显示网格线xlabel('磁场强度{\itH}/(A/m)');%在横坐标上标注'磁场强度H/(A/m)' ylabel('磁通密度{\itB}(T)');%在纵坐标上标注'磁通密度B(T)' mymodel=fittype('a*sinh(b*x)');%选择sinh为拟合模型opts=fitoptions(mymodel);%初始化设置set(opts,'Robust','LAR','Normalize','Off');%设置使用线性最小二乘法拟合Fit=fit(B',H',mymodel,opts);%拟合bt=B;%拟合曲线临时磁通密度数据ht=Fit.a.*sinh(Fit.b.*bt);%拟合曲线临时磁场强度数据plot(ht,bt);%在原始数据窗口绘制拟合曲线subplot(2,2,4);%将窗口划分2行2列使用第4子窗口hold on;%保持图形MX=1.6;%磁通密度最大值BI1=sin((-MX:0.01:MX)./MX.*pi).*MX;%磁通正弦变化HI1=Fit.a.*sinh(Fit.b.*BI1);%拟合曲线映射后的磁场强度XI1=1:length(BI1);%初始化x轴刻度XI1=XI1/length(BI1)*2*pi;%折算到0~2πplot(XI1,HI1);%绘制磁化电流曲线grid on;%显示网格线xlim([0,2*pi]);%限定横坐标显示范围xlabel('角度{\it\omegat}/rad');%在横坐标上标注'角度ωt/rad'ylabel('磁化电流{\itI}/安匝');%在纵坐标上标注'磁化电流I/安匝'【仿真实例1-3】解:用M语言编写绘制磁滞回线的MATLAB程序如下:clcclearBdata=[0,0.2,0.4,0.6,0.7,0.8,0.9,1.0,0.95,0.9,0.8,...0.7,0.6,0.4,0.2,0,-0.2,-0.4,-0.6,-0.7,-0.8,...-0.9,-1.0,-0.95,-0.9,-0.8,-0.7,-0.6,-0.4,-0.2,0];%输入磁感应强度基本数据Hdata=[0.24,0.26,0.29,0.365,0.425,0.515,0.675,...0.965,0.4,0.21,0.01,-0.09,-0.145,-0.2,...-0.225,-0.24,-0.26,-0.29,-0.365,-0.425,...-0.515,-0.675,-0.965,-0.4,-0.21,-0.01,...0.09,0.145,0.2,0.225,0.24];%输入磁场强度基本数据MX=1.39;%磁通密度最大值H=Hdata;B=Bdata;%磁滞回线数据H=H.*10;B=B.*MX;%调整B和H的显示比例subplot(2,2,1);%将窗口划分2行2列使用第1子窗口Bx=-pi/2:0.01:3*pi/2;%磁通密度数据范围-π/2~3π/2Bsin=1.5*sin(Bx);%计算正弦值扩大1.5倍以适应磁滞回线plot(Bx,Bsin);%绘制磁通密度正弦曲线hold on;%保持图形plot([-pi/23*pi/2],[00],'r-')%用红色实线绘制磁密曲线的x坐标轴plot([00],[-22],'r-')%用红色实线绘制磁密曲线的y坐标轴grid on;%显示网格线xlim([-pi/2,3*pi/2]);%限定横坐标显示范围-π/2~3π/2 xlabel('角度{\it\omegat}/rad');%在横坐标上标注'ωt'ylabel('磁通密度{\itB}/(T)');%在纵坐标上标注'磁通密度B/(T)' subplot(2,2,2);%将窗口划分2行2列使用第2子窗口hold on;%保持图形plot(H,B,'ro');%用红色'o'绘制磁滞回线B1=B(1:8);H1=H(1:8);%第1象限数据B>0数据B2=B(8:15);H2=H(8:15);%第2象限数据B>0数据B3=B(16:23);H3=H(16:23);%第3象限数据B>0数据B4=B(23:30);H4=H(23:30);%第4象限数据B>0数据BB1=[B4,B1];HH1=[H4,H1];%磁滞回线的下分支XI1=-10:0.1:10;%设置横坐标值YI1=interp1(HH1,BB1,XI1,'spline');%用3次样条插值计算plot(XI1,YI1);%绘制插值后磁滞回线下分支BB2=[B2,B3];HH2=[H2,H3];%磁滞回线的上分支XI2=-10:0.1:10;%设置横坐标值YI2=interp1(HH2,BB2,XI2,'spline');%用3次样条插值计算plot(XI2,YI2);%绘制插值后磁滞回线上分支grid on;%显示网格线xlabel('磁场强度{\itH}/(A/m)');%在横坐标上标注'磁场强度H/(A/m)' ylabel('磁通密度{\itB}/(T)');%在纵坐标上标注'磁通密度B/(T)'xlim([-1515])%设置横坐标范围subplot(2,2,4);%将窗口划分2行2列使用第4子窗口XI1=sin((0:0.01:MX)./MX.*pi./2).*MX;%磁通密度正弦变化(0~π/2)YI1=interp1(B1,H1,XI1,'spline');%用3次样条插值计算lengthX=length(XI1)-1;%计算先前波形的横坐标长度X1=(0:lengthX);%设置横坐标范围(0~π/2)X1=X1/lengthX*pi./2;plot(X1,YI1);%绘制0~π/2上的曲线hold on;%保持图形XI2=sin((MX:0.01:2*MX)./MX.*pi./2).*MX;%磁通密度正弦变化(π/2~π)YI2=interp1(B(8:16),H(8:16),XI2,'spline');%用3次样条插值计算lengthX=length(XI2)-1;%计算先前波形的横坐标长度X2=(lengthX:2*lengthX);%设置横坐标范围(π/2~π)X2=X2/lengthX*pi./2;plot(X2,YI2);%绘制π/2~π上的曲线XI3=sin((MX:0.01:1.5*MX)./MX.*pi).*MX;%磁通密度正弦变化(π~3π/2)YI3=interp1(B3,H3,XI3,'spline');%用3次样条插值计算lengthX=length(XI3)-1;%计算先前波形的横坐标长度X3=(2*lengthX:3*lengthX);%设置横坐标范围(π~3π/2)X3=X3/lengthX*pi./2;plot(X3,YI3);%绘制π~3π/2上的曲线XI4=sin((1.5*MX:0.01:2*MX)./MX.*pi).*MX;%磁通密度正弦变化(3π/2~2π)YI4=interp1(B4,H4,XI4,'spline');%用3次样条插值计算lengthX=length(XI4)-1;%计算先前波形的横坐标长度X4=(3*lengthX:4*lengthX);%设置横坐标范围(3π/2~2π)X4=X4/lengthX*pi./2;plot(X4,YI4);%绘制3π/2~2π上的曲线grid on;%显示网格线plot([0,2*pi],[00],'r-')%用红色实线绘制磁化电流曲线的x坐标轴xlim([0,2*pi]);%限定横坐标显示范围0~2πxlabel('角度{\it\omegat}/rad');%在横坐标上标注'ωt'ylabel('磁化电流{\itI}/安匝');%在纵坐标上标注'磁化电流I/安匝'【仿真实例2-1】解:用M语言编写绘制【例2-1】功角特性曲线的MATLAB程序如下:clcclearU1=6000/sqrt(3);%定子相电压I1=57.8;%定子相电流xd=64.2;%直轴电抗xq=40.8;%交轴电抗cosfain=0.8;%cosϕN=0.8fain=acos(cosfain);%求ϕNsinfain=sin(fain);%求sinϕNpsi=atan((U1*sinfain+xq)/(U1*cosfain));%求内功率因数角ψId=I1*sin(psi)*exp(1i*pi/2-psi);%计算直轴电流分量Iq=I1*cos(psi)*exp(-psi);%计算交轴电流分量E0=abs(U1*exp(-1i*fain)-1i*Id*xd-1i*Iq*xq);%计算励磁电动势th=0:0.01:pi;%x坐标轴0~π变化x=th./pi.*180;%换算成角度Pem1=3*U1*E0/xd.*sin(th);%求基本电磁功率Pem2=1.5*U1^2*(1/xq-1/xd).*sin(2.*th);%求附加电磁功率Pem=Pem1+Pem2;%凸极电磁功率hold on;%保持当前坐标轴和图形plot(x,Pem1,'b-',x,Pem2,'b-',x,Pem,'b-')%绘制各功角特性plot([0180],[00],'r-')%用红色实现绘制x坐标轴plot([9090],[-2e510e5],'r--')%用红色虚线绘制90°对应值text(50,9e5,'Pem')%在相应位置标注“Pem”text(130,7e5,'Pem1')%在相应位置标注“Pem1”text(70,1.5e5,'Pem2')%在相应位置标注“Pem2”xlabel('Angle[°]');%横坐标标注“Angle[°]”ylabel('Power[kW]');%纵坐标标注“Power[kW]”title('三相凸极同步电动机功角特性');%标题“三相凸极同步电动机功角特性”【仿真实例2-2】解:用M语言编写绘制【例2-2】矩角特性曲线的MATLAB程序如下:clcclearU1=3464;%定子相电压E0=6378;%励磁电动势xc=64;%同步电抗n1=1000;%同步转速th=0:.01:pi;%x坐标轴0~π变化x=th./pi.*180;%换算成角度T=90*U1*E0/(xc*pi*n1).*sin(th);%求电磁转矩plot(x,T)%绘制矩角特性xlabel('Angle[°]');%横坐标标注“Angle[°]”ylabel('Torque[N\cdotm]');%纵坐标标注“Torque[N ·m]”title('三相隐极同步电动机矩角特性');%标题“三相隐极同步电动机矩角特性”【仿真实例3-1】解:根据例题3-1的解得该电动机固有机械特性方程为1230123061972.ss ..s s s s T T mm m +=+=编制绘制该电动机固有机械特性的M 文件程序如下:clc clear n1=1500;%输入同步转速s=0:0.005:1;%转差率变化范围0~1,间隔0.005T=197.6./(0.123./s+s./0.123);%计算电磁转矩Subplot(1,2,1)%按照1行2列绘制子图1plot(s,T,'k-');%绘制机械特性xlabel('转差率{\its}');%横坐标标注“转差率s ”ylabel('电磁转矩{\itT}/(N\cdotm)');%纵坐标标注“电磁转矩T /(N·m)”title('异步电动机固有机械特性{\itT}={\itf}({\its})')%标注标题“T =f (s )”n=n1.*(1-s);%计算转速Subplot(1,2,2)%按照1行2列绘制子图2plot(T,n,'k-');%绘制机械特性xlabel('电磁转矩{\itT}/(N\cdotm)');%横坐标标注“电磁转矩T /(N·m)”ylabel('转速{\itn}/(rpm)');%纵坐标标注“转速n /(rpm)”title('异步电动机固有机械特性{\itn}={\itf}({\itT})')%标注标题“n =f (T )”hold on;%保持当前坐标轴和图形【仿真实例3-2】解:用M 语言编写绘制【例3-2】人为机械特性曲线的MATLAB 程序如下:clc clear m1=3;%异步电动机相数U1=220;%定子相电压n1=1000;%输入同步转速p=2;%极对数f1=50;%电源频率r1=2.08;%定子绕组电阻r2=1.53;%转子绕组电阻折算值w1=2*pi*f1/p;%计算同步角速度,单位:rad/sx1=3.12;%定子漏电抗x2=4.25;%转子漏电抗折算值s=0:0.005:1;%设定转差率变化范围:0~1,间隔0.005n=n1.*(1-s);%计算转速T=(m1*p*U1^2*r2)./s./(w1.*((r1+r2./s).^2+(x1+x2)^2));%计算电磁转矩subplot(2,2,1)%按2行2列绘制子图plot(s,T,'k');%绘制固有机械特性曲线xlabel('转差率{\its}');%横坐标标注“转差率s”ylabel('电磁转矩{\itT}/(N\cdotm)');%纵坐标标注“电磁转矩T/(N·m)”str_x=0.25;%标注字符的横坐标text(str_x,max(T),strcat('U1=',num2str(int16(U1)),'V'),'FontSize',9,'Color','black'); %标注固有机械特性曲线的电压值title('降低定子电压的人为机械特性')%标题“降低定子电压的人为机械特性”hold on;%保持当前坐标轴和图形subplot(2,2,2)%按2行2列绘制子图2plot(T,n,'k');%绘制固有机械特性曲线hold on;xlabel('电磁转矩{\itT}/(N\cdotm)');%横坐标标注“电磁转矩T/(N·m)”ylabel('转速{\itn}/(rpm)');%纵坐标标注“转速n/(rpm)”text(max(T)-20,500,strcat('U1=',num2str(int16(U1)),'V'),'FontSize',9,'Color','black'); %标注固有机械特性曲线的电压值title('降低定子电压的人为机械特性')%标题“降低定子电压的人为机械特性”str_y=500;%设定字符串的纵坐标初值for coef=0.75:-0.25:0.25;%设定降低定子电压的范围U1p=U1*coef;%降低定子电压T1=(m1*p*U1p^2*r2)./s./(w1.*((r1+r2./s).^2+(x1+x2)^2));%计算电磁转矩subplot(2,2,1)%按2行2列绘制子图1plot(s,T1,'k-');%绘制降低定子电压人为机械特性str=strcat('U1=',num2str(int16(U1p)),'V');%创建标注字符串text(str_x,max(T1)+5,str,'FontSize',9,'Color','black');%标记各曲线的电压值subplot(2,2,2)%按2行2列绘制子图2plot(T1,n,'k-');%绘制降低定子电压人为机械特性str=strcat('U1=',num2str(int16(U1p)),'V');%创建标注字符串str_y=str_y+100;%修改字符串的纵坐标值text(max(T1)-5,str_y,str,'FontSize',9,'Color','black');%标记各曲线的电压值endsubplot(2,2,3)%按2行2列绘制子图3plot(s,T,'k-');%绘制固有机械特性曲线xlabel('转差率{\its}');%横坐标标注“转差率s”ylabel('电磁转矩{\itT}/(N\cdotm)');%纵坐标标注“电磁转矩T/(N·m)”str_x=0.75;%标注字符的横坐标text(str_x,max(T)-45,strcat('r2=',num2str(r2),'\Omega'),'FontSize',9,'Color','black'); %标注固有机械特性曲线的电阻值title('改变转子电阻的人为机械特性')%标题“改变转子电阻的人为机械特性”hold on;%保持当前坐标轴和图形subplot(2,2,4)%按2行2列绘制子图4plot(T,n,'k-');%绘制固有机械特性曲线hold on;xlabel('电磁转矩{\itT}/(N\cdotm)');%横坐标标注“电磁转矩T/(N·m)”ylabel('转速{\itn}/(rpm)');%纵坐标标注“转速n/(rpm)”text(50,400,strcat('r2=',num2str(r2),'\Omega'),'FontSize',9,'Color','black');%标注固有机械特性曲线的电阻值title('改变转子电阻的人为机械特性')%标题“改变转子电阻的人为机械特性”r2p=r2;%设定改变的转子电阻的初值str_y1=400;%设定字符串的纵坐标初值for coef=1:4;%设定改变转子电阻的范围r2p=r2p+0.75;%改变转子电阻T1=(m1*p*U1^2*r2p)./s./(w1.*((r1+r2p./s).^2+(x1+x2)^2));%计算电磁转矩subplot(2,2,3)%按2行2列绘制子图3plot(s,T1,'k-');%绘制改变转子电阻人为机械特性str=strcat('r2=',num2str(r2p),'\Omega');%创建标注字符串str_y=T1(length(T1))-5;%标注字符串的纵坐标值text(str_x,str_y+11,str,'FontSize',9,'Color','black');%标记各曲线的电阻值subplot(2,2,4)%按2行2列绘制子图4plot(T1,n,'k-');%绘制改变转子电阻人为机械特性str=strcat('r2=',num2str(r2p),'\Omega');%创建标注字符串str_y1=str_y1-90;%修改字符串的纵坐标值text(50+coef*8,str_y1,str,'FontSize',9,'Color','black');%标记各曲线的电阻值end【仿真实例4-1】解:用M语言编写绘制直流发电机空载特性曲线的MATLAB程序如下:%绘制直流发电机空载特性曲线问题clcclearIfdata1=[0.0,0.5,0.7,0.8,1.0,1.2,1.5];Ifdata2=[0.0,0.5,0.7,0.8,1.0,1.2,1.5];%励磁电流I f值U0data1=[2,75,93.5,99,106,111.5,117];U0data2=[18,83.6,97.5,102.5,109.5,114,117];%空载电压U0值xdata=0:.1:1.5;%y坐标0~120ydata1=interp1(Ifdata1,U0data1,xdata,'spline');ydata2=interp1(Ifdata2,U0data2,xdata,'spline');%采用样条插值的方法分析数据plot(Ifdata1,U0data1,'*')%用'*'描点绘制空载特性hold on;%保持当前坐标轴和图形plot(Ifdata2,U0data2,'*')%绘制I f,U0坐标hold on;plot(xdata,ydata1);%绘制x,y坐标hold on;%保持当前坐标轴和图形plot(xdata,ydata2);%绘制x,y坐标hold on;%保持当前坐标轴和图形title('直流发电机空载特性')%标题'直流发电机空载特性' xlabel('{\itI}_f(A)')%x坐标标签'I f(A)'ylabel('{\itU}_0(V)')%y坐标标签'U0(V)'axis([0,2,0,120])【仿真实例4-2】解:用M语言编写绘制他励直流发电机外特性曲线的MATLAB程序如下:%绘制他励直流发电机外特性曲线问题clcclearIdata=[0,4.3,7,8.8,13,15,17];%负载电流I值Udata=[118,116,114,112.5,110,108.5,107];%负载电压U值xdata=0:1:17;%x坐标0~17ydata=interp1(Idata,Udata,xdata,'spline');%采用样条插值的方法分析数据plot(Idata,Udata,'*');%用'*'描点绘制外特性hold on%保持当前坐标轴和图形plot(xdata,ydata);%绘制x,y坐标hold on%保持当前坐标轴和图形title('他励直流发电机外特性')%标题'他励直流发电机外特性' xlabel('{\itI}(A)')%x坐标标签'I(A)'ylabel('{\itU}(V)')%y坐标标签'U(V)'axis([0,20,0,150])%设置轴线数据范围【仿真实例4-3】解:用M语言编写绘制并励直流发电机外特性曲线的MATLAB程序如下:%绘制并励直流发电机外特性曲线问题clcclearnN=1500;IfN=1.4;Rf=75;Ra=2.3;%输入发电机基本数据Ifdata=[0,0.5,0.7,0.8,1.0,1.2,1.5];%输入励磁电流U0data=[5,75,95,100,108,110,117];%输入空载电压If=0:0.01:12;%重新设置励磁参数P=polyfit(Ifdata,U0data,3);U0=polyval(P,If);%空载特性曲线拟合U=If*Rf;%计算电枢端电压Ia=(U0-U)/Ra;%计算电枢电流I=Ia-If;%计算负载电流plot(I,U)%绘制并励直流发电机外特性hold on%保持当前坐标轴和图形title('并励直流发电机外特性')%标题'并励直流发电机外特性'axis([0,20,0,120])%设置轴线数据范围xlabel('{\itI}(A)')%x坐标标签'I(A)'ylabel('{\itU}(V)')%y坐标标签'U(V)'【仿真实例4-4】解:用M语言编写仿真并励直流发电机自励过程和求稳态电压的MATLAB程序如下:%仿真并励直流发电机自励过程和求稳态电压问题%sh_ge_se_ex_ode函数的M文件function dydt=sh_ge_se_ex_ode(~,iff)%定义该M—函数为sh_ge_se_ex_ode,即%shunt_generator_self_excited_odeglobal a1a2a3a4Rf%指定全局变量Lf=40;Rf=75;%输入发电机基本数据Ifdata=[0,0.5,0.7,0.8,1.0,1.2,1.5];%输入励磁电流实验数据U0data=[5,75,95,100,108,110,117];%输入感应电动势数据a=polyfit(Ifdata,U0data,3);%曲线拟合dydt=1/Lf*(a(1)*iff^3+a(2)*iff^2+a(3)*iff^1+a(4))-Rf/Lf*iff;%列写标准形式微分方程并将感应电动势用%励磁电流的拟合多项式函数表示a1=a(1);a2=a(2);a3=a(3);a4=a(4);%给全局变量赋值%脚本M文件[t,iff]=ode23(@sh_ge_se_ex_ode,[010],[0]);%选择微分方程解算指令ode23()global a1a2a3a4Rf%指定全局变量subplot(3,1,1),%定义绘制仿真曲线1ea=a1*iff.^3+a2*iff.^2+a3*iff.^1+a4;%求感应电动势plot(iff,ea)%绘制e a=f(I f)曲线hold on%保持当前坐标轴和图形uf=Rf.*iff;%计算u fplot(iff,uf,'g')%用绿颜色绘制u f=f(i f)场阻线title('并励直流发电机自励过程')%标题'并励直流发电机自励过程'xlabel('{\itI}_f(A)')%曲线1x坐标标签'I f(A)'ylabel('{\itE}_a/{\itU}_f(V)')%曲线1y坐标标签'E a/U f(V)'axis([0,1.6,0,150])%设置x、y坐标值subplot(3,1,2)%定义绘制曲线2plot(t,iff);%绘制曲线2即i f=f(t)xlabel('{\itt}(s)')%曲线2x坐标标签't(s)'ylabel('{\itI}_f(A)')%曲线2y坐标标签'I f(A)'axis([0,5,0,2])subplot(3,1,3),%定义绘制曲线3plot(t,(a1*iff.^3+a2*iff.^2+a3*iff.^1+a4));%绘制e a曲线xlabel('{\itt}(s)')%曲线3x坐标标签't(s)'ylabel('{\ite}_a(V)')%曲线3y坐标标签'e a(V)'iff,a1*iff.^3+a2*iff.^2+a3*iff.^1+a4;%计算励磁电流和感应电动势的数值axis([0,5,0,150])【仿真实例4-5】解:用M语言编写绘制他励直流电动机工作特性的MATLAB程序如下:%绘制他励直流电动机工作特性问题clcclearUN=220;PN=22;IaN=115;Nn=1500;%输入电动机参数Ra=0.21;%输入电枢电阻CePhiN=(UN-Ra*IaN)/Nn;%计算电动势常数C eΦNCTPhiN=9.55*CePhiN;%计算电磁转矩常数C TΦNIa=0:IaN;%电枢电流从0~额定电流I aNn=UN/CePhiN-Ra/(CePhiN)*Ia;%计算转速TN=CTPhiN*Ia;%计算电磁转矩TNP=TN*10;%为清楚起见,将电磁转矩扩大十倍显示plot(Ia,n,'b.-',Ia,TNP,'r.-');%绘制转速特性和转矩特性曲线xlabel('电枢电流{\itI}_a/A')%横坐标标签'电枢电流I a/A'ylabel('转速{\itn}/rpm,电磁转矩{\itT}/N.m')%纵坐标'转速n/rpm,电磁转矩T/N.m' text(30,1500,'转速{\itn}');%标记转速曲线text(50,500,'电磁转矩{\itT}(X10)');%标记转矩曲线【仿真实例4-6】解:用M语言编写绘制串励直流电动机工作特性的MATLAB程序如下:%绘制串励直流电动机工作特性问题clcclearUN=220;PN=22;IaN=115;Nn=1500;%输入电动机参数Ra=0.18;%输入电枢电阻Rf=0.31;%输入励磁电阻k=0.01;%输入比例常数CePhiN=(UN-(Ra+Rf)*IaN)/Nn;%计算电动势常数C eΦNCe=CePhiN/k/IaN;%计算电动势常数C eIa=0:IaN;%电枢电流从0~额定电流I aNn=UN./(Ce*k.*Ia)-(Ra+Rf)/(Ce*k);%计算转速start_p=30;%设置显示的起始点Ia_p=Ia(start_p:length(Ia));%截取电流显示区间n_p=n(start_p:length(n));%截取转速显示区间CTPhiN=9.55*CePhiN;%计算电磁转矩常数C TΦNCT=CTPhiN/k/IaN;%计算电磁转矩常数C TTN=CT*k*Ia.*Ia;%计算电磁转矩TNP=TN*30;%为清楚起见,将电磁转矩扩大三十倍显示plot(Ia_p,n_p,'b.-',Ia,TNP,'r.-');%绘制转速特性和转矩特性曲线xlabel('电枢电流{\itI}_a/A')%横坐标标签'电枢电流I a/A'ylabel('转速{\itn}/rpm,电磁转矩{\itT}/N.m')%纵坐标标签'转速n/rpm,电磁转矩T/N.m' text(40,5500,'转速\itn');%标记转速曲线text(15,1000,'电磁转矩{\itT}(X30)');%标记转矩曲线【仿真实例5-1】解:用M语言编写绘制他励直流电动机机械特性的MATLAB程序如下:clcclearPN=22,UN=220,IN=115,nN=1500,Ra=0.21;%输入铭牌数据IaN=IN;%计算电枢电流CePhiN=(UN-Ra*IaN)/nN;%计算电动势常数C eΦNCTPhiN=9.55*CePhiN;%计算电磁转矩常数C TΦNIa=0:IaN;%建立电枢电流数组n=UN/CePhiN-Ra/(CePhiN)*Ia;%计算转速T=CTPhiN*Ia;%计算电磁转矩figure(1);%建立1号图形窗口plot(T,n,'.-');%绘制固有机械特性曲线title('固有机械特性');%标题'固有机械特性'xlabel('电磁转矩{\itT}/N\cdotm');%横轴标注'电磁转矩T/N•m'ylabel('转速{\itn}/rpm');%纵轴标注'转速n/rpm'ylim([0,1800]);%限制纵轴显示范围figure(2);%建立2号图形窗口plot(T,n,'rd');%绘制固有机械特性曲线title('降低电枢电源电压的人为机械特性');%标题'降低电枢电源电压的人为机械特性' xlabel('电磁转矩{\itT}/N\cdot m');%横轴标注'电磁转矩T/N•m'ylabel('转速{\itn}/rpmin');%纵轴标注'转速n/rpm'hold on;%保持当前坐标轴和图形for jy=1:-0.25:0.25;U=UN*jy;%改变电枢电源电压n=U/CePhiN-Ra/(CePhiN*CTPhiN)*T;%计算对应不同电枢电源电压的转速plot(T,n,'-');%绘制改变电枢电源电压的人为机械特性str=strcat('{\it U}=',num2str(U),'V');%显示字符串处理y=1700*jy;%显示字符串纵坐标text(60,y,str);%给曲线标注电压值endfigure(3);%建立3号图形窗口Rc=0;%临时变量n=UN/CePhiN-(Ra+Rc)/(CePhiN*CTPhiN)*T;%计算转速plot(T,n,'rd');%绘制固有机械特性曲线title('电枢回路串电阻的人为机械特性');%标题'电枢回路串电阻的人为机械特性' xlabel('电磁转矩{\itT}/N\cdot m');%横轴标注'电磁转矩T/N•m'ylabel('转速{\itn}/rpmin');%纵轴标注'转速n/rpm'hold on;%保持当前坐标轴和图形Rc=0.02;%电枢串电阻值for Rc=0:0.5:1.9;n=UN/CePhiN-(Ra+Rc)/(CePhiN*CTPhiN)*T;%计算转速plot(T,n,'-');%绘制电枢回路串电阻的人为机械特性str=strcat('{\it R}=',num2str(Ra+Rc),'\Omega');%字符串处理y=400*(4-Rc*1.8);%显示字符串的纵坐标text(120,y,str);%给各曲线标记电阻值endylim([0,1700]);%限制纵轴显示范围figure(4);%建立4号图形窗口n=UN/CePhiN-Ra/(CePhiN*CTPhiN)*T;%计算转速plot(T,n,'rd');%绘制固有机械特性曲线title('减弱磁通的人为机械特性');%标题'减弱磁通的人为机械特性' xlabel('电磁转矩{\itT}/N\cdot m');%横轴标注'电磁转矩T/N•m'ylabel('转速{\itn}/rpmin');%纵轴标注'转速n/rpm'hold on;%保持当前坐标轴和图形for ct=0.5:0.25:1.3;CePhi=CePhiN*ct;CTPhi=CTPhiN*ct;%改变磁通值n=UN/CePhi-Ra/(CePhi*CTPhi)*T;%计算转速plot(T,n,'-');%绘制改变磁通时的人为机械特性str=strcat('{\it\phi}=',num2str(ct),'*\phi_N');%显示字符串处理y=3600-1850*ct;%显示字符串纵坐标text(120,y,str);%给各曲线标记磁通endylim([0,3600]);%限制纵坐标的显示范围。
经典-同步电机模型的MATLAB仿真h
安徽工业大学工商学院课程设计(论文)同步电机模型的MATLAB仿真学生姓名:李春笋学号:111842161专业班级:气1142指导教师:范国伟2013年12月20日摘要采用电力电子变频装置实现电压频率协调控制,改变了同步电机历来的恒速运行不能调速的面貌,使它和异步电机一样成为调速电机大家庭的一员。
本文针对同步电机中具有代表性的凸极机,在忽略了一部分对误差影响较小而使算法复杂度大大增加的因素(如谐波磁势等),对其内部电流、电压、磁通、磁链及转矩的相互关系进行了一系列定量分析,建立了简化的基于abc三相变量上的数学模型,并将其进行派克变换,转换成易于计算机控制的d/q坐标下的模型。
再使用MATLAB中用于仿真模拟系统的SIMULINK 对系统的各个部分进行封装及连接,系统总体分为电源、abc/dq转换器、电机内部模拟、控制反馈四个主要部分,并为其设计了专用的模块,同时对其中的一系列参数进行了配置。
系统启动仿真后,在经历了一开始的振荡后,各输出相对于输出时间的响应较稳定。
关键词:同步电机 d/q模型 MATLAB SIMULINK 仿真。
The Simulation Platform of Synchronous Machine by MATLABAbstract:The utilization of transducer realizes the control of voltage’s frequency. It changes the situation that Synchronous Machine is always running with constant speed. Just like Asynchronous Machine, Synchronous machine can also be viewed as a member of the timing machine. This thesis intends to aim at the typical salient pole machine in Synchronous Machine. Some quantitative analysis are made on relations of salient pole machine among current, voltage, flux, flux linkage and torque, under the condition that some factors such as harmonic electric potential are ignored. These factors have less influence on error but greatly increase complexity of arithmetic. Thus, simplified mathematic model is established on the basis of a, b, c three phase variables. By the Park transformation, this model is transformed to d, q model which, is easy to be controlled by computer. Simulink is used to masking and linking all the parts of the system. The system can be divided into four main parts, namely power system, abc/dq transformation, simulation model of the machine and feedback control. Special blocks are designed for the four parts and a series of parameters in these parts are configured. The results of simulation show that each output has a satisfactory response when there is disturbance.Key Words: Synchronous Machine Simulation d/q Model MATLAB SIMULINK目录第1章引言 (1)1.1引言 (1)1.2同步电机概述 (1)1.3系统仿真技术概述 (2)1.4仿真软件的发展状况与应用 (2)1.5MATLAB概述 (2)1.6S IMULINK概述 (4)1.7小结 (5)第2章同步电机基本原理 (6)2.1理想同步电机 (6)2.2ABC/DQ模型的建立 (6)第3章仿真系统总体设计 (10)3.1系统对象 (10)3.2系统分块 (10)3.3控制反馈环节 (11)第4章仿真系统详细设计 (13)4.1总体设计 (13)4.2具体设计 (13)4.3控制反馈环节 (16)第5章系统仿真运行 (17)5.1输出结果稳定情况 (17)5.2小结 (20)第6章结论 (21)参考文献 (22)第1章引言1.1引言世界工业进步的一个重要因素是过去几十年中工厂自动化的不断完善。
直流电机调速matlab仿真报告

直流电机调速仿真报告1. 背景直流电机是一种常见的电动机类型,广泛应用于工业生产和家庭设备中。
在实际应用中,为了满足不同工况下的需求,需要对直流电机进行调速控制。
调速控制可以实现电机转速的精确控制,提高系统的稳定性和效率。
本报告旨在通过Matlab仿真分析直流电机调速控制系统,在理论与实践结合的基础上,提出相应的建议。
2. 分析2.1 直流电机调速原理直流电机调速原理主要基于改变电源的电压或者改变外加负载来实现对电机转速的控制。
常见的直流电机调速方法有:•电压调制法:通过改变直流电源的输出电压来改变转矩和转速;•变阻器分压法:通过改变外接阻值来改变转矩和转速;•变极数法:通过改变励磁回路中串联或并联的励磁线圈数目来改变转矩和转速;•PWM调制法:通过脉冲宽度调制技术来控制输入给定功率。
2.2 直流电机调速控制系统直流电机调速控制系统由电源、电机、传感器、控制器和负载组成。
其中,传感器用于测量电机的转速和位置,控制器根据测量值计算出合适的控制信号,通过电源提供给电机。
负载则影响电机的转速和转矩。
常见的直流电机调速控制方法有:•比例积分(PI)控制:根据误差信号进行比例和积分运算,生成合适的输出信号;•模糊控制:基于模糊推理原理,根据输入变量和规则库生成输出信号;•自适应控制:根据系统动态特性自动调整参数以实现最优性能。
2.3 仿真建模与参数设置本次仿真采用Matlab/Simulink软件进行建模与仿真。
首先需要确定直流电机的基本参数,如额定功率、额定转速、额定电压等。
然后根据实际情况设置仿真模型中的参数。
本次仿真设置了一个基于PWM调制法的直流电机调速系统模型。
具体参数如下:•额定功率:100W•额定转速:1500rpm•额定电压:220V•PWM调制频率:1kHz•控制器采样周期:0.01s3. 结果与分析3.1 仿真结果展示在进行仿真之后,我们得到了直流电机调速系统的仿真结果。
以下是部分结果的展示:•转速曲线图:•转矩曲线图:3.2 结果分析根据仿真结果,可以对直流电机调速系统进行分析。
matlab机电系统仿真大作业

曲柄滑块机构运动学仿真1、设计任务描述通过分析求解曲柄滑块机构动力学方程,编写matlab 程序并建立Simulink 模型,由已知的连杆长度和曲柄输入角速度或角加速度求解滑块位移与时间的关系,滑块速度和时间的关系,连杆转角和时间的关系以及滑块位移和滑块速度与加速度之间的关系,从而实现运动学仿真目的。
2、系统结构简图与矢量模型下图所示是只有一个自由度的曲柄滑块机构,连杆与长度已知图2-1 曲柄滑块机构简图设每一连杆(包括固定杆件)均由一位移矢量表示,下图给出了该机构各个杆件之间的矢量关系图2-2 曲柄滑块机构的矢量环3.匀角速度输入时系统仿真3.1 系统动力学方程系统为匀角速度输入的时候,其输入为输出为;(1) 曲柄滑块机构闭环位移矢量方程为:(2) 曲柄滑块机构的位置方程(3) 曲柄滑块机构的运动学方程通过对位置方程进行求导,可得由于系统的输出是与,为了便于建立A*x=B 形式的矩阵,使x=[ ],将运动学方程两边进行整理,得到将上述方程的v1 与w3 提取出来,即可建立运动学方程的矩阵形式3.2 M 函数编写与Simulink 仿真模型建立3.2.1 滑块速度与时间的变化情况以及滑块位移与时间的变化情况仿真的基本思路:已知输入w2 与,由运动学方程求出w3 和v1,再通过积分,即可求出与r1。
(1) 编写Matlab 函数求解运动学方程将该机构的运动学方程的矩阵形式用M 函数compv(u)来表示。
设r2=15mm,r3=55mm,r1(0)=70mm,。
其中各个零时刻的初始值可以在Simulink 模型的积分器初始值里设置M 函数如下:function [x]=compv(u) %u(1)=w2%u(2)=sita2%u(3)=sita3 r2=15; r3=55;a=[r3*sin(u(3)) 1;-r3*cos(u(3)) 0]; b=[-r2*u(1)*sin(u(2));r2*u(1)*cos(u(2))]; x=inv(a)*b;2) 建立Simulink 模型M 函数创建完毕后,根据之前的运动学方程建立Simulink 模型,如下图:图3-1 Simulink 模型同时不要忘记设置r1 初始值70,如下图:图3-2 r1 初始值设置设置输入角速度为150rad/s ,运行时间为0.1s ,点击运行,即可从示波器中得到速度和时间以及位移和时间的图像3.2.2 滑块位移和滑块速度之间的图像为了得到滑块位移和滑块速度之间的图像,需要通过to workspace 模块将simulink 里位移和时间的数据传递到Matlab 的工作区中,从而在M 文件中再次利用,从Simulink 模块传递到工作区的数据的名称是simout。
第五章MATLAB在电力系统故障分析中的仿真实例精选全文

第五章MATLAB在电力系统故障分析 中的仿真实例
第五章MATLAB在电力系统故障分析 中的仿真实例
无阻尼绕组同步发电机三相短路电流计算
第五章MATLAB在电力系统故障分析 中的仿真实例
第五章MATLAB在电力系统故障分析 中的仿真实例
图5-13 发电机端突然发生三相短路的Simulink仿真模型
第五章MATБайду номын сангаасAB在电力系统故障分析 中的仿真实例
图5-14 同步发电机模块的参数设置
第五章MATLAB在电力系统故障分析 中的仿真实例
图5-15 升压变压器模块的参数设置
第五章MATLAB在电力系统故障分析 中的仿真实例
第五章MATLAB在电力系统故障分析 中的仿真实例
6)Transition status和Transition times用来设置转换状态和转换时间; 其中,Transition status表示故障开关的状态,通常用“1”表示闭合, “0”表示断开;Transition times表示故障开关的动作时间;并且 每个选项都有两个数值,而且它们是一一对应的。 7)Snubbers resistance和snubbers Capacitance用来设置并联缓冲电 路中的过渡电阻和过渡电容。 8)Measurements 用来选择测量量。
图5-16 利用Powergui模块的潮流计算和电机初始化窗口计算初始参数
第五章MATLAB在电力系统故障分析 中的仿真实例
•5.3 单相短路故障仿真
•当网络元件只用电抗表示时,不对称短路的序网络方程
第五章MATLAB在电力系统故障分析 中的仿真实例
matlab电机仿真精华50例
matlab电机仿真精华50例Matlab是一种功能强大的数学仿真软件,可用于电机仿真的建模和分析。
以下是50个精华的Matlab电机仿真例子,涵盖了各种不同类型的电机和相关问题。
1. 直流电机的速度控制仿真:使用PID控制算法实现直流电机的速度控制,并观察不同参数设置对性能的影响。
2. 三相感应电机启动仿真:模拟三相感应电机的启动过程,包括起动电流和转矩的变化。
3. 永磁同步电机的矢量控制仿真:使用矢量控制算法实现永磁同步电机的速度和转矩控制。
4. 步进电机的脉冲控制仿真:通过给步进电机输入脉冲信号来实现精确的位置控制。
5. 交流电机的谐波分析仿真:分析交流电机的谐波失真情况,并提供相应的滤波解决方案。
6. 混合动力电机系统仿真:模拟混合动力汽车中的电动机和传统发动机的协同工作,评估燃油效率和性能。
7. 电机热仿真:通过建立电机的热传导模型,分析电机工作过程中的温度分布和热损耗。
8. 电机故障诊断仿真:使用信号处理和模式识别技术,模拟电机故障的检测和诊断。
9. 电机噪声仿真:通过建立电机的声学模型,分析电机噪声产生的原因和控制方法。
10. 无感传感器控制的无刷直流电机仿真:通过仿真实现无感传感器控制的无刷直流电机的速度和位置控制。
11. 非线性电机控制仿真:研究非线性电机的控制问题,并提供相应的解决方案。
12. 电机的电磁干扰仿真:分析电机工作时对其他电子设备造成的电磁干扰,并提供抑制措施。
13. 电机振动分析仿真:通过建立电机的振动模型,分析振动的原因和控制方法。
14. 电机轴承寿命仿真:通过建立电机轴承的寿命模型,预测电机轴承的使用寿命。
15. 电机的能量回收仿真:研究电机能量回收技术,在制动或减速过程中将电机生成的能量回收到电网中。
16. 电机齿轮传动仿真:分析电机齿轮传动系统的动力学性能和传动特性。
17. 多电机系统仿真:模拟多电机系统的协同工作,包括电机之间的通信和同步控制。
18. 电机启动过电流仿真:分析电机启动过程中的过电流现象,并提供相应的限流解决方案。
MATLAB在电机仿真中的应用

量,Cm 为电机额定励磁下的转矩电流比。
由式(1)-(6)可得到额定励磁下输入量为 Udo、
IL,输出量为 n 的直流电动机的数学模型。 (2)Simulink 下电动机仿真模型的建立
由式(1)-(6)可建立如图 1 所示的仿真模型。
封装后电机模型如图 2 所示。
这样就在 Simulink 中构造了一个环节表示直
E=Ce ×n
(2)
忽略粘性磨擦转矩衡方程为:
Te
-TL
=
GD2 375
·ddnt
(3)
Te =Cm Id
(4)
TL =Cm IL
(5)
Cm
=
30 π
Ce
(6)
E 为额定励磁下电动机的反电动势,Te 为额定励磁 下的电磁转矩,TL 为负载转矩,IL 为负载电流,GD2
为电力拖动系统部分折算到电动机轴上的飞轮惯
两相旋转电流转换到三相静止电流的转换模块,如
图 6、7 所示。
三相静止电压 Ua1、Ub1、Uc1 转换到两相同步旋
转电压 UM1、UT1 的变换为:
姨2 3
1
姨 姨11 1
cosθ sinθ
1 1
1
1
-sinθ cosθ
1
01
1
-
1 2
姨3
1 1
2
-
1 2
姨-
3 2
1
U U 1 1
11
1
11 11
(12)
ψ2 =L2 iM2 +LM iM1
(13)
0=L2 ir2+LM iT1
(14)
式中:r1、r2 为定、转子电阻;L1、L2 为定、转子自感;
基于MATLAB的发电机仿真实验
基于MATLAB的发电机仿真实验实验目的1.学习运用matlab软件对发电机进行仿真短路试验。
2.对系统的稳态运行、单相短路、两相短路、三相短路进行比较分析。
3.对系统并网状态进行分析。
实验内容用matlab软件搭建一个发电机与负荷小系统模型,仿真各种短路情况并对结果做进一步分析。
实验步骤一、熟悉原件熟悉matlab中simulink、simmechanics、simpowersystems等要用到的主要模块。
了解模块中的各个原件。
二、建立模型单机系统仿真图(并网前)(并网后)三、选择模块1.从simpowersystems-machines中找到发电机simplified synchronous machine si units元件并复制到电路图中,双击发电机元件,进行参数设置如下:2.从simulink-sources选择常数发生器constant元件,并复制到电路图中,设置机械功率值为700e6,设置电压幅值为156e3。
3.从Simpowersystems-measurements选择三相电压-电流测量three-phase v-i measurement元件,并复制到电路图中,设置参数如下:4.从Simpowersystems-elements中选择传输线路distributed parameters line元件,并复制到电路图中,设置参数如下:(线路1与线路2设置参数相同)5.从Simpowersystems-elements中选择三相电路短路故障发生器three-phase fault元件,并复制到电路图中,参数设置如下:6.从Simpowersystems-elements中选择三相断路器three-phase breaker元件,并复制到电路图中,参数设置如下:7.从Simpowersystems-elements中选择三相变压器three-phase transformer(two windings)元件,并复制到电路图中,参数设置如下:8.从Simpowersystems-elements中选择三相串联rlc负载three-phase series rlc load元件,并复制到电路图中,参数设置如下:9.从Simpowersystems-measurements中选择multimeter,并将它们复制到电路图中。
MATLAB simulink在电机中的仿真 ppt课件

MATLAB simulink在电机中的仿真 ppt课件
MATLAB应用技术
20
➢电机测试信号分配器
2021/3/26
MATLAB simulink在电机中的仿真 ppt课件
MATLAB应用技术
21
➢电机测试信号分配器参数设置
2021/3/26
• ir_abc:转子电流ira,irb,irc; • ir_qd:同步d-q坐标下的q轴下的转子电流ir_q 和d轴下的转子电流ir_d; • phir_qd:同步d-q坐标下的q轴下的转子磁通 phir_q和d轴下的转子磁通phir_d; • vr_qd:同步d-q坐标下的q轴下的转子电压 vr_q和d轴下的转子电压vr_d; • is_abc:定子电流isa,isb,isc; • is_qd:同步d-q坐标下的q轴下的定子电流 is_q和d轴下的定子电流is_d; • phir_qd:同步d-q坐标下的q轴下的定子磁通 phis_q和d轴下的定子磁通phis_d; • vs_qd:同步d-q坐标下的q轴下的定子电压 vs_q和d轴下的定子电压vs_d; • wm:电机的转速wm; • Te:电机的电磁转矩Te; • Thetam:电机转子角位移Thetam。
2021/3/26
MATLAB simulink在电机中的仿真 ppt课件
MATLAB应用技术
7
1.使用模块 (1)直流电动机(DC-Motor)
(2)直流电压源(E、Ef)
模块取自SimPowerSystems工具箱 中的Electrical Sources库里的DC voltage source模块。直流电压E为 直流电机的电枢回路电压,直流 电压Ef直流电机的励磁电压,二 者参数(Amplitude)设置为240。
电机模型 系统稳态仿真实例 matlab
(7-14)
u ( R G)i Lpi
/ p0
(7-15)
u [u sα u sβ
i [isα isβ ird
0 0]T
irq ]T
-13-
第7章 系统稳态仿真实例
Rs 0 R 0 0
G 0 0 0 p 0 M sr
0 Rs 0 0
i sαβ dq abc i rdq C abc ( Rr pLr )C dq
αβ abc C ABC (pM sr )C dq
(7-12)
-11-
第7章 系统稳态仿真实例
经过推导,得到
usα Rs Ls p u sβ 0 urd M sr p urq M sr
0 Rs pLs dq C abc pM rs
C αβ Rr pLr 0
于是,三相异步电动机在α β -d q 坐标系中的电压方程为
αβ ABC usαβ C ABC ( Rs pLs )C αβ u dq ABC C abc (pM rs )C αβ rdq
1 M 12 2 L2 1 M 12 2
1 M 12 2 1 M 12 2 L2
电磁转矩可按下式计算
Tem
p0 [i ABC 2
0 i abc ] M rs
M sr i ABC i abc 0
(7-6)
-7-
第7章 系统稳态仿真实例
2. α β -d q 坐标系中的方程 方程(7-1)是一组变系数的微分方程,若定子方采用α-β-0 坐标系,转子方采用静止的d-q-0坐标系,则可以转化为常系数 的微分方程。如图7-2所示,设定、转子三相绕组均无中线,电 机不含零序分量,按照功率不变约束,转子方采用的坐标变换
电机MATLAB仿真实验

实验一单相变压器空载仿真实验一、实验目的1用仿真的方法了解并求取变压器的空载特性。
2通过变压器空载仿真了解并求取变压器的参数和损耗。
二、预习要点1变压器空载运行有什么特点?2在变压器空载实验仿真中,如何通过仿真测取变压器的铁耗。
三、仿真项目1完成变压器空载运行仿真模型的搭建和参数设定。
2仿真测取空载特性U0=f(I0),P0=f(U0),cosΦ0=f(U0)。
四、仿真方法1仿真模块2仿真模型图1变压器空载实验接线图图2单相变压器空载仿真模型示例图图3变压器参数设置示例图(右侧饱和曲线数据请输入到左侧SaturationCharacteristic一栏)3空载仿真1)根据图1的接线图进行仿真模型搭建,搭建仿真模型如图2所示,所有频率的设置均改成50。
2)对单相变压器以及其他元器件模块的参数设置,选定额定电压,变压器变比等。
设定其额定容量S N=77V A,U1N/U2N=55/220V。
变压器低压侧接电源,高压侧开路。
变压器参数设置如图3所示。
3)可自行根据需要选择需要测量的波形以及有效值量,加入示波器以及计算模块进行测量并设定仿真时间。
4)调节电压源电压,调节范围在(1.25~0.2)U N范围内,测取变压器的U0,I0,P0,cosΦ0以及二次侧电压U AX等数据。
5)测取数据时,在额定电压附近侧的点较密,共测取10组数据记录于下表。
表1空载实验数据五、实验报告1.完成表12.绘制U0-I0特性曲线3.计算变压器变比4.计算低压侧的励磁参数实验二单相变压器短路仿真实验一、实验目的1用仿真的方法了解并求取变压器的短路特性。
2通过变压器短路仿真了解并求取变压器的参数和损耗。
二、预习要点1变压器短路运行有什么特点?2在变压器短路实验仿真中,如何通过仿真测取变压器的铜耗。
三、仿真项目1完成变压器短路运行仿真模型的搭建和参数设定。
2仿真测取短路特性U K=f(I K),P K=f(U K),cosΦK=f(U K)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
matlab电机仿真精华50例
Matlab是一种功能强大的仿真软件,它被广泛应用于电机仿真领域。
在这篇文章中,我们将介绍Matlab电机仿真的50个精华例子,帮助读者更好地了解和应用电机仿真技术。
1. 直流电机的仿真:通过Matlab可以模拟直流电机的性能,包括转速、扭矩和电流等。
2. 交流电机的仿真:使用Matlab可以模拟交流电机的工作原理,包括转子和定子的相互作用。
3. 同步电机的仿真:通过Matlab可以模拟同步电机的运行特性,包括电压和频率的控制。
4. 步进电机的仿真:利用Matlab可以模拟步进电机的运行过程,包括步进角度和步进速度等。
5. 无刷直流电机的仿真:通过Matlab可以模拟无刷直流电机的工作原理,包括转子和定子的相互作用。
6. 电机控制系统的仿真:利用Matlab可以模拟电机控制系统的运行过程,包括速度和位置的闭环控制。
7. 电机噪声的仿真:通过Matlab可以模拟电机噪声的产生和传播过程,帮助优化电机的设计。
8. 电机故障诊断的仿真:利用Matlab可以模拟电机故障的发生和诊断过程,提供故障检测和排除的方法。
9. 电机热仿真:通过Matlab可以模拟电机的热传导和散热过程,帮
助优化电机的散热设计。
10. 电机振动的仿真:利用Matlab可以模拟电机的振动特性,帮助优化电机的结构设计。
11. 电机效率的仿真:通过Matlab可以模拟电机的能量转换过程,评估电机的效率和能耗。
12. 电机启动过程的仿真:利用Matlab可以模拟电机的启动过程,包括起动电流和启动时间等。
13. 电机负载仿真:通过Matlab可以模拟电机在不同负载条件下的工作特性,帮助优化电机的设计。
14. 电机饱和仿真:利用Matlab可以模拟电机在饱和状态下的工作特性,提供更准确的仿真结果。
15. 电机电磁干扰的仿真:通过Matlab可以模拟电机产生的电磁干扰对其他设备的影响,提供干扰抑制的方法。
16. 电机电磁场的仿真:利用Matlab可以模拟电机内部的电磁场分布,帮助优化电机的设计。
17. 电机电气参数辨识的仿真:通过Matlab可以模拟电机的电气参数辨识过程,提供参数估计方法。
18. 电机损耗仿真:利用Matlab可以模拟电机的损耗情况,评估电机的热效应和能量损耗。
19. 电机控制策略的仿真:通过Matlab可以模拟不同控制策略对电机性能的影响,帮助选择最优的控制策略。
20. 电机转子动态仿真:利用Matlab可以模拟电机转子的动态响应,
包括转子的惯性和响应时间等。
21. 电机轴系动态仿真:通过Matlab可以模拟电机轴系的动态特性,包括轴向和径向的振动等。
22. 电机电磁噪声的仿真:利用Matlab可以模拟电机产生的电磁噪声,帮助优化电机的设计和降噪。
23. 电机电磁干扰的仿真:通过Matlab可以模拟电机产生的电磁干扰对其他设备的影响,提供干扰抑制的方法。
24. 电机整定过程的仿真:利用Matlab可以模拟电机整定的过程,包括参数选择和控制策略的优化等。
25. 电机转矩和速度特性的仿真:通过Matlab可以模拟电机转矩和速度的变化过程,帮助优化控制系统。
26. 电机电流和电压波形的仿真:利用Matlab可以模拟电机电流和电压的波形特性,帮助诊断电机故障。
27. 电机电磁场优化仿真:通过Matlab可以模拟电机的电磁场分布,优化电机的磁路设计。
28. 电机转子温度仿真:利用Matlab可以模拟电机转子的温度分布,帮助优化电机的散热设计。
29. 电机参数不确定性分析的仿真:通过Matlab可以模拟电机参数不确定性对系统性能的影响,提供系统鲁棒性分析方法。
30. 电机失效模式分析的仿真:利用Matlab可以模拟电机失效模式对系统可靠性的影响,提供故障诊断和修复策略。
31. 电机电磁场耦合仿真:通过Matlab可以模拟电机的电磁场分布
和结构耦合效应,提供设计优化的方法。
32. 电机控制系统稳定性仿真:利用Matlab可以模拟电机控制系统的稳定性,提供控制器设计和参数优化的方法。
33. 电机功率因数仿真:通过Matlab可以模拟电机的功率因数和功率因数校正控制,提供能耗优化的方法。
34. 电机电流谐波仿真:利用Matlab可以模拟电机电流谐波的产生和控制,提供谐波滤波器设计的方法。
35. 电机饱和饱和仿真:通过Matlab可以模拟电机在饱和状态下的工作特性,提供更准确的仿真结果。
36. 电机电气参数辨识的仿真:利用Matlab可以模拟电机的电气参数辨识过程,提供参数估计方法。
37. 电机磁滞仿真:通过Matlab可以模拟电机的磁滞特性,帮助优化电机的设计。
38. 电机振动和噪声优化仿真:利用Matlab可以模拟电机的振动和噪声特性,提供优化设计的方法。
39. 电机绕组温度仿真:通过Matlab可以模拟电机绕组的温度分布,帮助优化电机的散热设计。
40. 电机噪声抑制仿真:利用Matlab可以模拟电机噪声的传播和抑制过程,提供降噪设计的方法。
41. 电机电磁场优化仿真:通过Matlab可以模拟电机的电磁场分布,优化电机的磁路设计。
42. 电机振动模态分析的仿真:利用Matlab可以模拟电机的振动模
态和频率响应,提供结构优化的方法。
43. 电机换向过程仿真:通过Matlab可以模拟电机的换向过程,包括换向时间和电流波形等。
44. 电机电磁场耦合仿真:利用Matlab可以模拟电机的电磁场分布和结构耦合效应,提供设计优化的方法。
45. 电机损耗仿真:通过Matlab可以模拟电机的损耗情况,评估电机的热效应和能量损耗。
46. 电机参数不确定性分析的仿真:利用Matlab可以模拟电机参数不确定性对系统性能的影响,提供系统鲁棒性分析方法。
47. 电机失效模式分析的仿真:通过Matlab可以模拟电机失效模式对系统可靠性的影响,提供故障诊断和修复策略。
48. 电机电磁场优化仿真:利用Matlab可以模拟电机的电磁场分布,优化电机的磁路设计。
49. 电机电流谐波仿真:通过Matlab可以模拟电机电流谐波的产生和控制,提供谐波滤波器设计的方法。
50. 电机饱和仿真:利用Matlab可以模拟电机在饱和状态下的工作特性,提供更准确的仿真结果。
通过以上的50个精华例子,读者可以深入学习和应用Matlab电机仿真技术,为电机设计和控制提供有力的支持。
无论是从性能分析、设计优化还是故障诊断等角度,Matlab都是一个强大的工具,可以大大提高电机仿真的效率和准确性。
让我们一起探索和挖掘Matlab电
机仿真的更多可能性!。