AD转换控制单片机的PWM占空比
用比较器LM393来实现AD转换

用比较器LM393来实现A/D转换1.放大器部分,简单的检波,放大,假设得到信号S。
2.LM393右半边那个电压比较器,即2Out->P34,是用S与GND比较得到的输出结果,输出端加了个上拉。
3.LM393左半边那个电压比较器,即1Out-〉P15,就有点复杂,从逻辑上讲:S P12 P13 1out0 0 0 01 0 0 10 1 0 01 1 0 00 0 1 01 0 1 10 1 1 01 1 1 0其实从左到右4个三极管起的主要作用是开关作用而已,分别称为Q1,Q2,Q3,Q4.通过放大器放大后的信号S接在Q1基极当Q1导通,Q2导通的时候,Vin+=GND+0.7V当Q1断开,Q2导通的时候,Vin+=GND当Q1导通,Q2断开的时候,Vin+=Vcc当Q1断开,Q2断开的时候,Vin+=GNDQ3一直导通Q4导通的时候,Vin-=GND+0.7VQ4断开的时候,Vin-=Vcc-0.7V-0.7V(两个二极管的压降)值得讨论的是当 Q1,Q2,Q4都导通的时候,似乎Vin+与Vin-相等用普通单片机实现低成本高精度A/D与D/A转换(之一)摘要:用普通单片机实现低成本的多路A/D与D/A转换,其转换结果为8bit或更高。
关键词:单片机 A/D转换 D/A转换 PWM(脉冲宽度调制)比较器目前单片机在电子产品中已得到广泛应用,许多类型的单片机内部已带有A/D转换电路,但此类单片机会比无A/D转换功能的单片机在价格上高几元甚至很多,本文给大家提供一种实用的用普通单片机实现的A/D 转换电路,它只需要使用普通单片机的2个I/O脚与1个运算放大器即可实现,而且它可以很容易地扩展成带有4通道A/D转换功能,由于它占用资源很少,成本很低,其A/D转换精度可达到8位或更高,因此很具有实用价值。
其电路如图一所示:图一其工作原理说明如下:1、硬件说明:图一中“RA0”和“RA1”为单片机的两个I/O脚,分别将其设置为输出与输入状态,在进行A/D转换时,在程序中通过软件产生PWM,由RA0脚送出预设占空比的PWM波形。
单片机pwm占空比计算公式
单片机pwm占空比计算公式单片机中的PWM技术是指通过改变脉冲信号的占空比来控制输出电平的一种技术。
占空比是指一个周期内高电平存在的时间占整个周期时间的比例。
PWM技术广泛应用于电子设备、机器人等领域,具有精度高、功耗低、电压波动小等优点。
本文将详细介绍单片机PWM占空比计算的公式。
在单片机中,PWM的占空比可以通过寄存器的值来调节。
具体来说,占空比的计算公式如下:占空比 = (PWM的高电平时间 / PWM周期) * 100%其中,PWM周期指的是一个完整的PWM脉冲的时间,也就是一个周期的时间。
PWM的高电平时间指的是输出为高电平的时间。
举个例子来解释这个公式。
假设PWM的周期为10ms,高电平时间为2ms。
那么根据公式,可以得出占空比为:占空比 = (2ms / 10ms) * 100% = 20%这个结果表示在一个周期内,PWM信号的高电平存在的时间占整个周期时间的20%。
通过改变占空比,我们可以控制输出电平的高低。
当占空比为0%时,表示输出为低电平;当占空比为100%时,表示输出为高电平;当占空比在0%和100%之间时,表示输出电平介于低电平和高电平之间的模拟信号。
这样,我们就可以通过调节占空比来控制电机转速、LED亮度等。
在实际的单片机编程中,具体的占空比计算需要根据不同的单片机型号和编程语言来进行。
不同的单片机芯片可能会有不同的寄存器和计数器来控制PWM的时间。
在编程时,我们需要根据具体的单片机手册来了解并选择合适的寄存器和计数器设置。
总结起来,单片机PWM占空比的计算公式为(高电平时间/周期) * 100%。
通过改变占空比,我们可以控制输出电平的高低,实现对电机转速、LED亮度等的控制。
同时,需要注意不同型号单片机的具体设置方法可能会有所不同,需要查阅单片机手册来选择合适的寄存器和计数器来设置PWM信号。
利用PWM控制占空比

什么是占空比占空比(Duty Cycle)在电信领域中意思:在一串理想的脉冲序列中(如方波),正脉冲的持续时间与脉冲总周期的比值。
例如:脉冲宽度1μs,信号周期4μs的脉冲序列占空比为0.25。
在一段连续工作时间内脉冲占用的时间与总时间的比值。
在CVSD调制(continuously variable slope delta modulation)中,比特“1”的平均比例(未完成)。
在周期型的现象中,现象发生的时间与总时间的比。
负载周期在中文成语中有句话可以形容:「一天捕渔,三天晒网」,则负载周期为0.25。
占空比是高电平所占周期时间与整个周期时间的比值。
占空比越大,高电平持续的时间越长,电路的开通时间就越长PWM值增加则占空比减少!!!!!!!(请先看下面关于PWM的定义)PWM值增加应该是周期变大,那么占空比就减小了(此为个人见解如有不同见解请发邮箱1250712643@)占空比的图例什么是占空比(另一种解释)占空比是指高电平在一个周期之内所占的时间比率。
方波的占空比为50%,占空比为0.1,说明正电平所占时间为0.1个周期。
正脉冲的持续时间与脉冲总周期的比值。
例如:正脉冲宽度1μs,信号周期10μs的脉冲序列占空比为0.1。
什么是PWM1.脉冲宽度调制(PWM)是英文“Pulse Width Modulation”的缩写,简称脉宽调制。
它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用于测量,通信,功率控制与变换等许多领域。
脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。
通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
PWM 信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。
电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。
通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。
PWM占空比调整
timer0_initialize();
while(1);
}
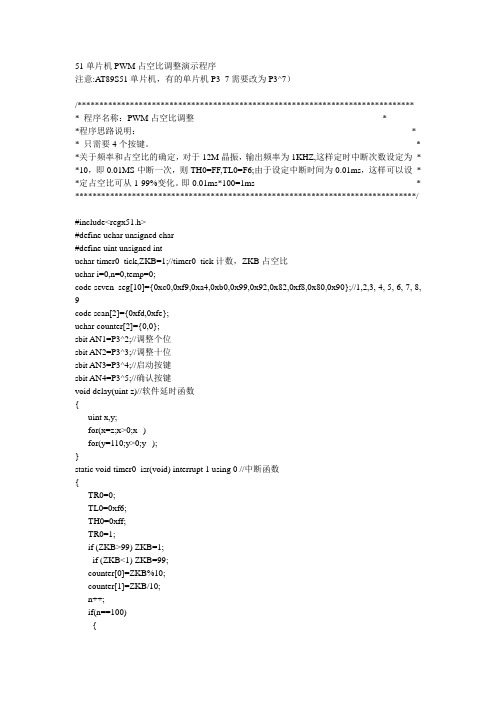
//按按键3启动脉冲器,初始设置占空比为1%,按键1调整十位,
//按键2调整个位,一旦调整,输出为0,必须按确认键确认,
//输出正确脉冲.可以占空比1-99%任意调节。
uchar i=0,n=0,temp=0;
code seven_seg[10]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};//1,2,3, 4, 5, 6, 7, 8, 9
code scan[2]={0xfd,0xfe};
uchar counter[2]={0,0};
n++;
if(n==100)
{
n=0;
i++;
if(i==2) i=0;
P0=seven_seg[counter[i]];
P2=scan[i];
}
timer0_tick++;
if(timer0_tick++==100)
{
timer0_tick=0;
}
if(AN2==0)
{
delay(100);
if(AN2==0)
******************************************************************************/
#include<regx51.h>
#define uchar unsigned char
#define uint unsigned int
AD转换PWM输出

/*VDD 1 14 vssP0.3/XIN 2 13 P4.4/AIN4正常控制检测P0.2/XOUT 3 12 P4.3/AIN3P0.4RST/VPP 4 11 P4.2/AIN2过压检测P5.3/BZ1/PWM1 5 10 P4.1/AIN1P5.4/BZ2/PWM2 6 9 P4.0/AIN0/VREFHP0.1/INT1 7 8 P0.0/INT0*/#include<sn8p2711A.h>#include <stdio.h>#define uint unsigned int#define uchar unsigned char#define led FP54uint pwm_i=0x01; //PWM初值占空比void delay(uint i){uint x,y;for(x=0;x<i;x++)for(y=0;y<150;y++);}void init_ADC(void){P4CON=0X10; //设置P4.4为单纯的输入口FP44M=0; //选择P4.4为模拟输入P4UR=0XEF; //禁止P4.4上拉电阻ADM=0X94; //使能ADC控制,AIN通道,选择AIN4输入FADCKS1=1; //选择频率为FCPU的ADC时钟FADCKS0=0;VREFH=0X03; //使能ADC转换选择内部参考电压VDD5.0V,ADC的分辨率为8位delay(1);FADS=1; //启动ADC转换while(!FEOC); //检测是否ADC结束,等待ADC结束FEOC=0; //清除AD转换标志位}void pwm_0(void) //初始化PWM口{FP54M=1; //p54m使能上拉电阻TC0M=0X70; //0111 0000设置TC0定时工作在内部时钟,FCPU/4分频,TC0C=0x20; //初始化装初值PWM间隔TC0R=0x00; //初始化装初值PWM占空比FTC0ENB=1; //开始FPWM0OUT=1; //使能输出PWMFTC0OUT=1; //允许P5.4输出}void pwm(void){TC0R=pwm_i;}void main(void){float vin,vinh,vinl;pwm_0();while(1){init_ADC();vinh=ADB;vinl=ADR&0x0f;vin=((vinh*16)+vinl)/4095.0*5;if(vin>=2.52)pwm_i--;if(vin<=2.5)pwm_i++;if((pwm_i==60)||(vin<2.0))pwm_i=0x01;pwm();}}//请教大师们,我这个AD转换是P4.4口检测的电压控制PWM输出调制的,怎样加上P4.2脚检测高压停止PWM输出的,请教大侠指教PWM输出前检测一下P4.2,如果是高就停止呗如果AD转换和PWM输出都是使用芯片内部资源来做,首先看看PWM 的输出特性:摘录:PWM 输出占空比和TCnR 的变化:在PWM 模式下,系统随时比较TCnC 和TCnR 的异同。
ad pwm占空比

ad pwm占空比
PWM(脉宽调制)占空比是指在一个周期内,高电平状态(脉冲信号为高电平)所占的时间比例。
通常用百分比表示。
PWM占空比可以通过改变高电平持续时间和周期来调节。
例如,一个50%的占空比意味着高电平状态和低电平状态在一个周期内的时间相等。
调整PWM占空比可以用于控制各种设备和系统,如电机速度控制、灯光亮度调节等。
较高的占空比将导致更长的高电平时间,而较低的占空比则会导致更短的高电平时间。
以下是一些常见的PWM占空比示例:
- 0%:脉冲信号始终处于低电平状态。
- 50%:脉冲信号的高电平和低电平状态时间相等。
- 100%:脉冲信号始终处于高电平状态。
要注意的是,不同的设备和系统可能有不同的PWM占空比要求,因此在使用PWM时,请参考相关设备或系统的规格
说明或文档以获取正确的占空比范围和值。
51单片机pwm占空比程序

51单片机pwm占空比程序摘要:1.51单片机简介2.PWM技术概述3.51单片机PWM占空比程序设计4.程序实现与结果分析正文:1.51单片机简介51单片机是一种经典的8位微控制器,由Intel公司于1981年推出,广泛应用于嵌入式系统领域。
其具有成本低、资源丰富、开发工具成熟等优点,成为众多学习者和工程师的首选。
2.PWM技术概述脉冲宽度调制(PWM)是一种在模拟世界中实现数字控制的方法。
通过改变脉冲的宽度,可以控制输出电压或电流的大小,从而实现对电机、LED亮度等设备的控制。
在51单片机中,可以通过定时器实现PWM信号的生成。
3.51单片机PWM占空比程序设计为了实现51单片机PWM占空比控制,我们需要编写相应的程序。
以下是一个简单的例子:```c#include <reg52.h>#include <intrins.h>#define uchar unsigned char#define uint unsigned intsbit PWM_OUT = P1^0; // 定义PWM输出引脚void Init_PWM(void) // 初始化PWM{TMOD = 0x01; // 定时器0工作在方式1TH0 = (65536 - 45872) / 256; // 计算占空比TL0 = (65536 - 45872) % 256;TR0 = 1; // 启动定时器0}void main(void){Init_PWM(); // 初始化PWMwhile (1){PWM_OUT = 0; // 占空比为1,点亮LED_nop_(); _nop_(); _nop_(); _nop_(); // 消隐期,延时PWM_OUT = 1; // 占空比为0,熄灭LED_nop_(); _nop_(); _nop_(); _nop_(); // 消隐期,延时}}```4.程序实现与结果分析上述程序通过初始化定时器0,设置其工作在方式1,即定时器0的计数值达到TH0和TL0的值时,会触发中断。
51单片机实现PWM波占空比可调
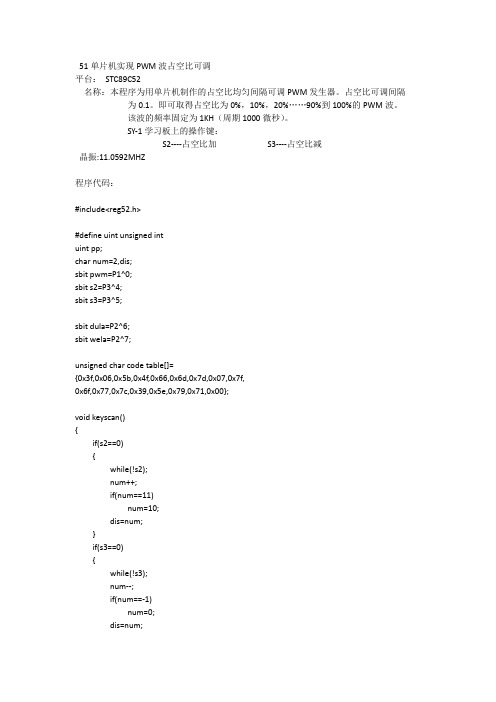
51单片机实现PWM波占空比可调平台:STC89C52名称:本程序为用单片机制作的占空比均匀间隔可调PWM发生器。
占空比可调间隔为0.1。
即可取得占空比为0%,10%,20%……90%到100%的PWM波。
该波的频率固定为1KH(周期1000微秒)。
SY-1学习板上的操作键:S2----占空比加S3----占空比减晶振:11.0592MHZ程序代码:#include<reg52.h>#define uint unsigned intuint pp;char num=2,dis;sbit pwm=P1^0;sbit s2=P3^4;sbit s3=P3^5;sbit dula=P2^6;sbit wela=P2^7;unsigned char code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71,0x00};void keyscan(){if(s2==0){while(!s2);num++;if(num==11)num=10;dis=num;}if(s3==0){while(!s3);num--;if(num==-1)num=0;dis=num;}}void display(a){dula=0;P0=table[a];dula=1;dula=0;wela=0;P0=0xfe;wela=1;wela=0;}void main(){TMOD=0x01;//模式设置,00000001,可见采用的是定时器0,工作与模式1(M1=0,M0=1)。
TR0=1;//打开定时器TH0=0Xff;//定时器设置,每隔100微秒发起一次中断。
TL0=0Xa4;ET0=1;//开定时器0中断EA=1;//开总中断while(1){keyscan();if((num!=0)&&(num!=10))//对于占空比为0和100%这两种极端情况,最好分离出,单独考虑{if(pp<=num)pwm=1;elsepwm=0;}else if(num==0)//当占空比为0pwm=0;elsepwm=1;if(pp==10)//当占空比为100%pp=0;display(num);//显示num当前值,占空比为num/10。
51单片机pwm占空比程序

51单片机pwm占空比程序摘要:一、51 单片机PWM 占空比概述二、51 单片机PWM 占空比调整方法1.函数控制占空比2.两级中断实现占空比调整3.定时器T0 和T1 控制占空比和频率4.使用DA 转换实现占空比调整三、51 单片机PWM 波占空比的实际应用四、总结正文:一、51 单片机PWM 占空比概述51 单片机是一种常见的微控制器,它具有丰富的外设和可编程I/O 口,适用于各种电子设备和控制系统。
在51 单片机中,PWM(脉冲宽度调制)是一种常用的技术,可以通过调整脉冲的占空比来实现对电机、LED 等设备的控制。
占空比是指高电平持续时间与整个周期的比值,它直接影响到输出电压的有效值,从而影响设备的工作状态。
二、51 单片机PWM 占空比调整方法1.函数控制占空比通过编写一个函数来实现占空比的调整,函数输入占空比,输出高电平持续时间和低电平持续时间。
在函数中使用循环来实现PWM 波的输出,通过改变循环中的延时来调整占空比。
这种方法简单易实现,但精度较低,适用于对占空比精度要求不高的场合。
2.两级中断实现占空比调整使用两级中断来实现占空比的调整,通过定时器T0 实现频率的控制,通过定时器T1 实现占空比的控制。
这种方法可以实现精确的占空比和频率调整,但需要编写较多的中断处理程序,较为复杂。
3.定时器T0 和T1 控制占空比和频率通过定时器T0 和T1 来实现PWM 波的输出,T0 控制频率,T1 控制占空比。
这种方法可以实现精确的占空比和频率调整,但需要编写较多的定时器中断处理程序,较为复杂。
4.使用DA 转换实现占空比调整通过使用DA 转换器来实现占空比的调整,DA 转换器可以将数字信号转换为模拟信号,通过调整输出电压来实现占空比的调整。
这种方法可以实现精确的占空比调整,但需要额外的硬件支持。
三、51 单片机PWM 波占空比的实际应用51 单片机PWM 波占空比在实际应用中可以用于控制电机的转速、LED 的亮度等。
用比较器LM393来实现AD转换
用比较器LM393来实现A/D转换1.放大器部分,简单的检波,放大,假设得到信号S。
2.LM393右半边那个电压比较器,即2Out->P34,是用S与GND比较得到的输出结果,输出端加了个上拉。
3.LM393左半边那个电压比较器,即1Out-〉P15,就有点复杂,从逻辑上讲:S P12 P13 1out0 0 0 01 0 0 10 1 0 01 1 0 00 0 1 01 0 1 10 1 1 01 1 1 0其实从左到右4个三极管起的主要作用是开关作用而已,分别称为Q1,Q2,Q3,Q4.通过放大器放大后的信号S接在Q1基极当Q1导通,Q2导通的时候,Vin+=GND+0.7V当Q1断开,Q2导通的时候,Vin+=GND当Q1导通,Q2断开的时候,Vin+=Vcc当Q1断开,Q2断开的时候,Vin+=GNDQ3一直导通Q4导通的时候,Vin-=GND+0.7VQ4断开的时候,Vin-=Vcc-0.7V-0.7V(两个二极管的压降)值得讨论的是当 Q1,Q2,Q4都导通的时候,似乎Vin+与Vin-相等用普通单片机实现低成本高精度A/D与D/A转换(之一)摘要:用普通单片机实现低成本的多路A/D与D/A转换,其转换结果为8bit或更高。
关键词:单片机 A/D转换 D/A转换 PWM(脉冲宽度调制)比较器目前单片机在电子产品中已得到广泛应用,许多类型的单片机内部已带有A/D转换电路,但此类单片机会比无A/D转换功能的单片机在价格上高几元甚至很多,本文给大家提供一种实用的用普通单片机实现的A/D 转换电路,它只需要使用普通单片机的2个I/O脚与1个运算放大器即可实现,而且它可以很容易地扩展成带有4通道A/D转换功能,由于它占用资源很少,成本很低,其A/D转换精度可达到8位或更高,因此很具有实用价值。
其电路如图一所示:图一其工作原理说明如下:1、硬件说明:图一中“RA0”和“RA1”为单片机的两个I/O脚,分别将其设置为输出与输入状态,在进行A/D转换时,在程序中通过软件产生PWM,由RA0脚送出预设占空比的PWM波形。
51单片机pwm占空比程序

51单片机pwm占空比程序【原创版】目录一、51 单片机 PWM 占空比概述二、51 单片机 PWM 占空比程序的实现方法1.函数控制法2.两级中断法3.DA 转换法三、51 单片机 PWM 占空比程序的注意事项四、51 单片机 PWM 占空比程序的应用实例五、总结正文一、51 单片机 PWM 占空比概述51 单片机是一种常见的微控制器,广泛应用于各种嵌入式系统中。
在 51 单片机中,PWM(脉冲宽度调制)技术是一种常用的技术,通过改变脉冲的宽度来控制电机、LED 等设备的亮度或转速。
占空比是 PWM 技术中的重要概念,表示高电平持续时间与整个周期的比值。
本文将介绍如何用 51 单片机实现 PWM 占空比的调整。
二、51 单片机 PWM 占空比程序的实现方法1.函数控制法通过编写一个函数来实现 PWM 占空比的调整。
在该函数中,输入占空比,比如 fun(x,y),高电平持续 x 毫秒,低电平持续 (y-x) 毫秒。
通过 while(1) 循环调用该函数,即可实现 PWM 占空比的调整。
2.两级中断法该方法利用 51 单片机的两个定时器实现 PWM 占空比的调整。
首先,在定时器 T0 中开启定时器 T1,并使 pwm1 引脚输出高电平;然后,在定时器 T1 中关闭 T1,使 pwm0 引脚输出低电平。
通过调整 T0 和 T1 的初值,可以实现不同占空比的 PWM 波形输出。
3.DA 转换法该方法需要外部 DA 转换器来实现。
通过将 DA 转换器的输出接至51 单片机的某个 I/O 端口,可以实现对 PWM 波形占空比的调整。
这种方法的优点是实现简单,但缺点是需要额外的硬件支持。
三、51 单片机 PWM 占空比程序的注意事项在编写 51 单片机 PWM 占空比程序时,需要注意以下几点:1.避免在中断程序中进行复杂计算,以免影响程序运行速度。
2.占空比的计算要考虑定时器中断的分辨率,以保证占空比的精确性。
软件中PID与PWM的占空比之间的关系

软件中PID与PWM的占空比之间的关系软件中PID与PWM的占空比之间的关系如何让UK值与PWM占空比值对应,进而实现占空比输出和输出控制电压对应。
(注意,我这里讨论的前提是输出控制的是电压,不是PWM方波。
PWM输出后要经过滤波整形再输出控制。
)前提条件:输出电压控制电压范围是0-10V。
给定、反馈、输出电压采样输入电压范围是0-5V(经过运放)。
使用单片机AD为10位AD芯片。
那么10位AD芯片电压采集得到的数据范围就是0-1024。
PWM为 8位可调占空比方波,0对应输出占空比为0的方波,255对应输出占空比100%的方波,127对应输出50%的方波。
比如当前给定是2.5V,反馈电压是1V。
(KP,KI,KD等系数略,关于PID算法的整数实现我在前文中有论述如何实现)。
那么经过AD采样1、给定2.5V对应为 5122、反馈1V对应为 205假定经过PID计算得到的UK为400也就意味着输出电压应当为(400*(UPWM峰值电压))/1024那么UK对应的PWM占空比是多少呢?我们知道,UK=1024对应占空比为100,也就是PWM的占空比系数为255。
可知,PWM系数 = UK/4;那么400就应当对应系数 400/4=100。
也就是输出电压=400*10/1024=3.9V同时,由于采样精度以及PWM输出占空比精度控制的问题,将导致输出电压和期望值不是那么线性,所以,我在项目内加入了输出电压采样的控制。
采样AD输入为0-5V,所以,对于输出0-10V有一个缩小的比例。
输出10V则采样值对应为255输出5V则采样之对应127可知,3.9V对应AD结果为97采样输出电压值,可以针对性的调整一下占空比输出,从而得到误差允许范围内的一个控制输出电压。
同时,经过一些加速控制的手段。
可以比较迅速的达到控制的目的。
下文中的UK控制方法是针对增量式PID控制而来做的。
/****************************************************/void PWMProcess(void){uint16 idata temp;uint16 idata UKTemp;temp = 0;UKTemp = 0;if( Pwm.ChangeFlag_Uint8 != 0 ) //判断是否需要改变占空比{ //是否需要改变占空比和你的被控系统特性有关Pwm.ChangeFlag_Uint8 = 0;UKTemp = _Uint16 + SwIn.AddValue_Uint16;//计算UK控制量//控制量和计算值以及一个开关量有关,我这里的开关量是系统需要的时候叠加在控制量上的一个变量。
详解PWM原理、频率与占空比
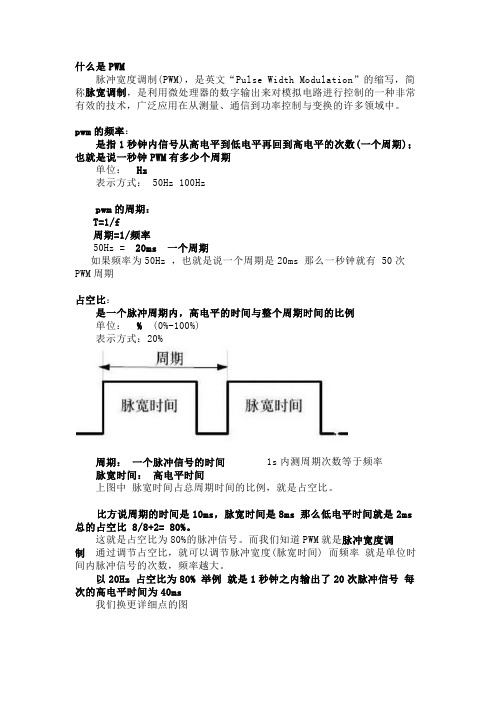
什么是PWM脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
pwm的频率:是指1秒钟内信号从高电平到低电平再回到高电平的次数(一个周期);也就是说一秒钟PWM有多少个周期单位:Hz表示方式: 50Hz 100Hzpwm的周期:T=1/f周期=1/频率50Hz = 20ms一个周期如果频率为50Hz ,也就是说一个周期是20ms 那么一秒钟就有 50次PWM周期占空比:是一个脉冲周期内,高电平的时间与整个周期时间的比例单位:%(0%-100%)表示方式:20%周期:一个脉冲信号的时间1s内测周期次数等于频率脉宽时间:高电平时间上图中脉宽时间占总周期时间的比例,就是占空比。
比方说周期的时间是10ms,脉宽时间是8ms 那么低电平时间就是2ms 总的占空比 8/8+2= 80%。
这就是占空比为80%的脉冲信号。
而我们知道PWM就是脉冲宽度调制通过调节占空比,就可以调节脉冲宽度(脉宽时间) 而频率就是单位时间内脉冲信号的次数,频率越大。
以20Hz 占空比为80% 举例就是1秒钟之内输出了20次脉冲信号每次的高电平时间为40ms我们换更详细点的图上图中,周期为TT1为高电平时间T2 为低电平时间假设周期T为 1s 那么频率就是 1Hz 那么高电平时间0.5s ,低电平时间0.5s 总的占空比就是 0.5 /1 =50%PWM原理以单片机为例,我们知道,单片机的IO口输出的是数字信号,IO口只能输出高电平和低电平。
假设高电平为5V 低电平则为0V 那么我们要输出不同的模拟电压,就要用到PWM,通过改变IO口输出的方波的占空比从而获得使用数字信号模拟成的模拟电压信号。
我们知道,电压是以一种连接1或断开0的重复脉冲序列被夹到模拟负载上去的(例如LED灯,直流电机等),连接即是直流供电输出,断开即是直流供电断开。
AD与DA转换实验详解

PwmOut(i);
j=100;
while(--j);
}
}
}
void Delay(uint16 ms)
{int i,j;
for(i=0;i<ms;i++)
for(j=0;j<100;j++);
}
仿真波形如右图所示:
2、设计程序,利用STC12C5A60S2单片机内部PCA模块产生PWM信号,经低通滤波后输出正弦波。
此外,CCAP1H(字节地址为FBH)和CCAP1L(字节地址为EBH)分别是PCA模块1捕捉/比较寄存器的高8位和低8位。在8位PWM模式下,当PCA计数器低8位(CL)的值小于CCAP1L时,PWM1引脚输出为低,大于或等于CCAP1L时,PWM1引脚输出为高;另外,当CL的值由FFH加到00H(溢出)时,CCAP1H的当前值自动加载到CCAP1L中,因此,程序只需对CCAP1H进行设定,即可在PWM1引脚稳定输出相应占空比的PWM信号。
void PwmInit()
{CMOD=0x08;
CCAPM1=0x42;
CR=1;
}
void PwmOut(uint8 Duty)
{CCAP1H=255-Duty;
}
void main()
{
int i,j;
PwmInit();
/*while(1)
{PwmOut(30);
Delay(800);
PwmOut(120);
ADC_CONTR&=~0x10;
return ADC_RES;
}
void UartInit()
{
TMOD=0x20;
TH1=TL1=0xFD;
A/D和PWMD/A的工作原理及应用
5.1.2
A/D转换器的硬件结构及 功能特点
图5-2 8096芯片的ACH7/P0.7~ACH0/P0.0引脚
5.1.3
Hale Waihona Puke A/D使用方法1)模拟参考电压源 VREF的稳定程度直接影响A/D的转换精 度。如不使用 A / D 转换器,则必须将 VREF 和 VCC 相连, ANGND 和 Vss 相连。 此时 P0口可作普通的数字口。
硬件方面的一些问题:
(1)接地。在整个系统中数字地与模拟地不可形成回路, 以免对模拟信号造成干扰。数字地和模拟地正确的接法 是:在系统中,先将数字地、模拟地分别相连,然后在 系统中选一点(一般选在 A/D转换器处)相连接。另 外,VREF与 ANGND以及VCC与VSS之间都需加滤波电容, 以消除高频干扰。如下图所示。
当A/D转换器被启动后,需要88个状态 周期才能得到转换结果。在这期间内, 可以让CPU进行其它工作,也可以用软 件延时等待。注意:必须在88个状态周 期后读取的结果才是正确的。如选 12MHz时钟,A/D转换时间为88×3/ 12=22µ s,如选6MHZ时钟,A/D转换 时间为88×3/6=44µ s。
第 5章
A/D和PWM(D/A) 的工作原理及应用
内容提要 本章介绍8096单片机A/D转换 器和PWM发生器的基本原理和应用。在 A/D 转换器中,首先说明原理、结构以 及控制,然后介绍软件设计及应用实例。 在PWM发生器中,分别介绍结构原理和 实际应用。此外本章还介绍几种滤波方 法。
5.1
5.1.1
图5-12 PWM输出波形
5.2.2
PWM控制
1. 输入/输出控制寄存器IOC1(8位,地址16H)。 IOC1 是只写寄存器, IOC1.0 = 1 时, PWM / P2.5 引脚可以输出 PWM 波(引脚作 PWM 端使用)。 而当 IOC1.0=0 时,它只能输出开关信号(引脚作 P2.5使用)。 2. 脉冲宽度调制寄存器 PWM_CONTROL ( 8 位,地 址17H)。PWM_CONTROL也是一种只写寄存器, 写入数据后,PWM波的宽度随之而定。 有两种方法提供PWM输出:一种是通过HSO提供; 另一种是由 8096 的脉冲宽度调制器提供。前一种 方法可提供周期和占空比可改变、分辨率为 1 / 65536 ( 16 位)的 PWM 信号;后一种方法则提供 周期固定、占空比可变、分辨率为1/256(8位) 的 PWM信号。
msp430 如何用外部的电压控制pwm的占空比

这个是 TI的例程,我自己算出来的波形是T1 :96个低电平,160个高电平,周期是256,T2:32个低电平,224个高电平,周期也是256,标准答案是:占空比: T1: 75%T2: 25%自己也不知道哪出错了?这个真要请高手指点,谢谢~~#include <msp430.h>int main(void){ WDTCTL = WDTPW + WDTHOLD; // Stop WDT P1DIR |= 0x0C; // P1.2 and P1.3 output P1SEL |= 0x0C; // P1.2 and P1.3 TA1/2 options CCR0 = 128; // PWM Period/2 CCTL1 = OUTMOD_6; // CCR1 toggle/set CCR1 = 32; // CCR1 PWM duty cycle CCTL2 = OUTMOD_6; // CCR2 toggle/set CCR2 = 96; // CCR2 PWM duty cycle TACTL = TASSEL_2 + MC_3; // SMCLK, up-down mode _BIS_SR(LPM0_bits); // Enter LPM0}
答案是对的。输出模式6是CCRX时翻转,CCR0时置位。增减计数方式。T1:(1)0~32低电平,(2)32~128与128~32(192个)高电平,(3)32~0与0~32(64个)低电平,重复(2,(3),占空比192/(192+64)=75%T2:同理,占空比25%不知道那个160是哪来的。追问增减计数模式,进入减计数时,tar从128减到 CCR1=32时,out会翻转吗?不是说 减计数从128到到32 时,翻转一次吗?回答只要是CCR0=CCR1时都要翻转。不管是CCR0增加时还是减少时
stm32cubeidepwm占空比设置函数

stm32cubeidepwm占空比设置函数在STM32CubeIDE中,PWM占空比设置函数主要与定时器(Timer)相关。
以下是在STM32CubeIDE中设置PWM占空比的步骤及对应代码:1. 配置定时器(一般是基本定时器TIM6/TIM7或高级定时器TIM1/TIM2/TIM3等)的时间基准(Prescaler)和计数器周期(Period)。
```c// 配置定时器时间基准htim6.Instance = TIM6;htim6.Init.Prescaler = 0;htim6.Init.CounterMode = TIM_COUNTERMODE_UP;htim6.Init.Period = 999;hres = HAL_TIM_Base_Init(&htim6);```2. 配置PWM输出模式,即使能够产生PWM波形。
```c// 配置PWM输出模式sConfigOC.OCMode = TIM_OCMODE_PWM1;sConfigOC.Pulse = 0;sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;HAL_TIM_PWM_ConfigChannel(&htim6, &sConfigOC, TIM_CHANNEL_1);```3. 在需要修改PWM占空比的地方,调用设置PWM占空比的函数,即修改比较值(Pulse)。
```c// 设置PWM占空比__HAL_TIM_SET_COMPARE(&htim6, TIM_CHANNEL_1, 500);```以上代码以TIM6为例,具体使用哪个定时器需要根据具体情况进行配置。
pwm频率与占空比的计算公式
pwm频率与占空比的计算公式
PWM(脉冲宽度调制)是一种电子电路控制技术,常用于调节直
流电机转速、调节LED亮度等场合。
在PWM控制中,频率和占空比是两个重要的参数,下面介绍它们的计算公式。
1. 计算PWM频率的公式
PWM的频率表示单位时间内脉冲信号的个数,通常以赫兹(Hz)为单位。
PWM的频率越高,电路的响应速度就越快,但也会导致功耗增加。
一般而言,PWM的频率应该尽量高,但不要超过设备能够承受的最高频率。
PWM频率的计算公式为:
频率 = 1 / (T ×样点数)
其中,T是PWM周期,样点数是每个PWM周期中采样的次数。
例如,如果PWM周期为10ms,采样次数为1000次,则PWM频率为:频率 = 1 / (0.01 × 1000)= 100Hz
2. 计算PWM占空比的公式
PWM的占空比表示脉冲信号的高电平时间占整个周期时间的比例,通常以百分比表示。
占空比越高,输出信号的平均值越大,输出功率也越大。
PWM占空比的计算公式为:
占空比 = 高电平时间 / 周期时间× 100%
例如,如果PWM周期为10ms,高电平时间为2ms,则PWM占空比为:
占空比 = 2 / 10 × 100% = 20%
以上是PWM频率和占空比的计算公式,可以根据实际需要进行应用和计算。
单片机-占空比可调的PWM波形发生器讲解
微控制器技术课程设计报告设计题目:占空比可调的PWM波形发生器微控制器技术课程设计任务书设计题目:占空比可调的PWM波形发生器设计时间:——设计任务:在Proteus中画出原理图或使用实物,编制程序,实现以下功能:1、理解PWM的工作原理。
2、编制PWM程序,使用八段发光字符管显示占空比。
3、可与电机连接,驱动电机以不同的转速旋转。
背景资料:1、单片机原理与应用2、检测技术3、计算机原理与接口技术进度安排:1、第一天,领取题目,熟悉设计内容,分解设计步骤和任务;2、第2天,规划设计软硬件,编制程序流程、绘制硬件电路。
3、第3天,动手制作硬件电路,或编写软件,并调试。
4、第4天,中期检查,书写设计报告。
5、第5天,提交设计报告,整理设计实物,等待答辩。
6、第6天,设计答辩。
题目:占空比可调的PWM波形发生器一、设计目的掌握PWM的工作原理;学会编制PWM程序,使用八段发光字符管显示占空比;并与电机连接,驱动电机以不同的转速旋转。
二、设计思路直流电机PWM控制系统的主要功能包括:实现对直流电机转速的调整,能够很方便的实现电机的智能控制。
主体电路:即直流电机PWM控制模块。
这部分电路主要由AT89C51单片机的I/O端口、定时计数器、外部中断扩展等调整直流电机的转速,能够很方便的实现电机的智能控制。
其间是通过AT89C51单片机产生脉宽可调的脉冲信号并输入到L298驱动芯片来控制直流电机工作的。
该直流电机PWM控制系统由以下电路模块组成:设计输入部分:这一模块主要是利用带中断的独立式键盘来实现对直流电机的加速、减速控制。
设计控制部分:主要由AT89C51单片机的外部中断扩展电路组成。
直流电机PWM控制实现部分主要由一些二极管、电机和L298直流电机驱动模块组成。
设计显示部分: LED数码显示部分,实现对PWM脉宽调制占空比的实时显示。
三、方案设计系统框架设计总体设计方案的硬件部分详细框图如图一所示。
入模块、LED显示模块及电机驱动模块组成。