汽车理论第六章 修改
《汽车理论》第六章 汽车的平顺性

aw
1 T
T 0
aw2 (t)dt
aw(t)是通过频率加权函数滤波网络后得到的加速 度时间信号。
频率加权
a(t)
滤波网络
aw(t)
平顺性评价方法
1. 按加速度加权均方根值评价。样本时间T一 般取120s。
2. 同时考虑3个方向 3轴向xs、ys、zs振动的 总加权加速度均方根值为:
av
(1.4axw )2
2. 频率加权系数 对不同频率的振动,人体敏感度也不一样。例如,人
体内脏在椅面z向振动4-8Hz发生共振,8-12.5Hz对脊椎影 响大。椅面水平振动敏感范围在0.5-2Hz。标准用频率加权 函数w描述这种敏感度。
平顺性名词解释(2)
3. 均方根值
a(t)是测试的加速度时间信号。
4. 加权均方根值
G 32768 65536 131072 1?2.26 243.61 344.52 H 131072 262144 524288 344.52 487.22 689.04
三、汽车振动系统的简化、单质量系统振动
一、系统ห้องสมุดไป่ตู้化
x
z
y
z
msr
msc
msf
mur
b
a
muf
L
单质量振动系统 在远离车轮固有频率 ft 10 ~ 16Hz的较低激振 频率(f 5Hz)范围内轮 胎的变形很小,可忽略其 弹性变形和质量得到单质 量垂直振动系统模型
C 2m2 K
方程的解为
z(t) Aent sin( 02 n2 t )
z
系统固有圆频率
0
r有阻尼固有圆频率
Aent
r
2 0
n2
汽车理论课件第六章汽车的平顺性

生物力学评价法
总结词
生物力学评价法是通过研究人体对振动的反应来评价汽车的平顺性,主要关注人体对振动的感知和影 响。
详细描述
生物力学评价法结合了生物学、医学和工程学的知识,通过研究人体对振动的生理反应和心理感受, 评估汽车平顺性对乘客健康和舒适度的影响。这种方法能够更深入地了解人体对振动的敏感性和适应 性,为汽车平顺性的优化提供更有针对性的建议。
合理调整汽车的行驶状态也可以改善汽车的 平顺性。
详细描述
驾驶员可以通过合理控制车速、保持稳定的 车距和行驶轨迹等措施,降低车辆在行驶过 程中受到的外部干扰,从而提高汽车的平顺 性。此外,智能驾驶技术的不断发展也为行 驶状态的自动调整提供了更多可能性,未来 可以通过智能算法自动调整车辆参数和行驶
状态,实现更加舒适的驾驶体验。
平顺性与交通事故风险
交通事故风险
研究表明,车辆的平顺性对交通事故风险有显著影响。平顺性差的 车辆可能导致驾驶员和乘客受伤的风险增加。
平顺性与安全带使用
在颠簸的路面上,安全带能够提供额外的保护,减少因碰撞产生的 伤害。
安全驾驶习惯
除了选择具有良好平顺性的车辆外,驾驶员还应养成安全驾驶习惯, 如保持车距、注意观察路况等,以降低交通事故风险。
重要性
良好的平顺性可以提高乘客和驾驶员 的舒适度,降低由于振动和冲击引起 的疲劳、晕车等问题,同时也有助于 保护车辆部件,延长车辆使用寿命。
平顺性研究的历史与发展
历史
平顺性的研究始于20世纪初,随着汽车工业的发展和人们对舒适度的要求不断 提高,平顺性的研究逐渐受到重视。
发展
近年来,随着计算机技术和测试技术的发展,平顺性的研究得到了更深入的探 讨和应用。现代汽车理论课件中,平顺性的研究和应用已经成为一个重要的章 节。
汽车理论第六章汽车的平顺性

➢只考虑 xs、ys、zs 这三 个轴向振动,且xs、 ys 两
个水平轴向的轴加权系数
取 k=1.4。
➢靠背水平轴向 xb、yb 可以由椅面水平轴向 xs、ys
代替,此时轴加权系数取
k=1.4。
➢我国标准规定,评价汽车平顺性时就考虑椅面 xs、ys、zs
三个轴向振动。
12
第一节 人体对振动的反应和平顺性的评价
第二节 路面不平度的统计特性
对上式的等 式两边取对数 后作图,得到 速度功率谱密 度。
u
Gq(n0)
34
第二节 路面不平度的统计特性
对上式的等 式两边取对数 后作图,得到 加速度功率谱 密度。
u Gq(n0)
35
第二节 路面不平度的统计特性
本节内容结束 下一节
36
汽车理论
第四十一讲
主讲教师:杨志华
评价指标 加权加速度均方根值 撞击悬架限位的概率
行驶安全性
4
第六章 汽车的平顺性
第一节 人体对振动的反应和平顺性的评价
➢本节将学习人体对振动的反应、人体坐 姿受振模型、平顺性的评价方法等。
返回目录 5
第一节 人体对振动的反应和平顺性的评价
一、人体对振动的反应
人体对振动的反应
主观因素 心理 生理
频率
各轴向的频率加权函数(渐近线)
频率加权函数
0.5 0.5Hz f 2Hz
wk
f
f / 4 2Hz f 4Hz 1 4Hz f 12.5Hz
12.5 / f 12.5Hz f 80Hz
wd
f
1 2 /
f
(0.5Hz f 2Hz)
2Hz f 80Hz
wc
汽车理论6-5
第六章作业:clear;clc;%初始化题干参数如下:f0=1.5;s=0.25;%阻尼比δgama=9;%刚度比γmu=10;%质量比μfs=3;ypss=0.25;g=9.8;ua=20;Gqn0=2.56*10^(-8);%路面不平度系数a0=10^(-6);n0=0.1;detaf=0.2;N=180;f=detaf*(0:N);lambda=f/f0;%车身频率比λlambdas=f/fs;%车轮频率比λW_f=0*f;deta=((1-lambda.^2).*(1+gama-1/mu*lambda.^2)-1).^2+4*s^2*lambda.^2.*(gama-(1/ mu+1)*lambda.^2).^2;z1_q=gama*sqrt(((1-lambda.^2).^2+4*s^2*lambda.^2)./deta); %幅频响应|z1/q|z2_z1=sqrt((1+4*s^2*lambda.^2)./((1-lambda.^2).^2+4*s^2*lambda.^2));%幅频响应|z2/z1|p_z2=sqrt((1+(2*ypss*lambdas).^2)./((1-lambdas.^2).^2+(2*ypss*lambdas).^2));%幅频响应|p/z2|z2_q=gama*sqrt((1+4*s^2*lambda.^2)./deta);p_q=p_z2.*z2_q; %幅频响应|z2/q|sqrt_Gq_f=4*pi^2*f*sqrt(Gqn0*n0^2*ua);sqrt_Gz1_f=z1_q.*sqrt_Gq_f;sqrt_Gz2_f=z2_q.*sqrt_Gq_f;sqrt_Ga_f=p_q.*sqrt_Gq_f;sigmaq=sqrt(trapz(f,sqrt_Gq_f.^2));%路面不平度加速度均方根值sigmaz1=sqrt(trapz(f,sqrt_Gz1_f.^2));%车轮加速度均方根值sigmaz2=sqrt(trapz(f,sqrt_Gz2_f.^2));%车身加速度均方根值sigma_a=sqrt(trapz(f,sqrt_Ga_f.^2));%人体加速度均方根值for i=1:(N+1)if f(i)<=2W_f(i)=0.5;elseif f(i)<=4W_f(i)=f(i)/4;elseif f(i)<=12.5W_f(i)=1;elseW_f(i)=12.5/f(i);endendaww=W_f.^2.*sqrt_Ga_f.^2;aww=sqrt(trapz(f,aww));%加权加速度均方根值Law1=20*log10(aww/a0);%加权振级disp('路面不平度加速度均方根值为');disp(sigmaq);disp('车轮加速度均方根值为');disp(sigmaz1);disp('车身加速度均方根值为');disp(sigmaz2);disp('人体加速度均方根值为');disp(sigma_a);disp('加权加速度均方根值为');disp(aww);disp('加权振级');disp(Law1);figure(1)plot(f,z1_q);title('幅频特性|z1/q|, (f=1.5Hz, δ=0.25,γ=9,μ=10)'),xlabel('激振频率f/Hz'),ylabel('|z1/q|');figure(2)plot(f,z2_z1);title('幅频特性|z2/z1|,(f=1.5Hz, δ=0.25,γ=9,μ=10)'),xlabel('激振频率f/Hz'),ylabel('|z2/z1|');figure(3)plot(f,p_z2);title('幅频特性|p/z2|,(fs=1.5Hz, δs=0.25)'),xlabel('激振频率f/Hz'),ylabel('|p/z2|'); figure(4)plot(f,sqrt_Gz1_f);title('车轮加速度均方根值√Gz1(f)谱图'),xlabel('激振频率f/Hz'),ylabel('√Gz1(f)'); figure(5)plot(f,sqrt_Gz2_f);title('车身加速度均方根值√Gz2(f)谱图'),xlabel('激振频率f/Hz'),ylabel('√Gz2(f)'); figure(6)plot(f,sqrt_Ga_f);title('人体加速度均方根值√Ga(f)谱图'),xlabel('激振频率f/Hz'),ylabel('√Ga(f)'); %第二问:ypss0=(0.125:0.005:0.5);a=0*ypss0;La=0*ypss0;M=length(ypss0);for i=1:Myps=ypss0(i);lambdas=f/fs;deta=((1-lambda.^2).*(1+gama-1/mu*lambda.^2)-1).^2+4*yps^2*lambda.^2.*(gama-(1/mu+1)*lambda.^2).^2;p_z2=sqrt((1+(2*ypss*lambdas).^2)./((1-lambdas.^2).^2+(2*ypss*lambdas).^2));z2_q=gama*sqrt((1+4*yps^2*lambda.^2)./deta);p_q=p_z2.*z2_q;jfg_Gqddf=4*pi^2*sqrt(Gqn0*n0^2*ua)*f;jfg_Gaf=p_q.*jfg_Gqddf;kk=W_f.^2.*jfg_Gaf.^2;aww(i)=sqrt(trapz(f,kk));endLaw1=20*log10(aww/a0);figure(7)plot(ypss0,aww);title('aw随δs的变化'),xlabel('“人体—座椅”系统的阻尼比δs'),ylabel('aw/m*s^-2');figure(8)plot(ypss0,Law1);title('Law随δs的变化'),xlabel('“人体—座椅”系统的阻尼比δs'),ylabel('Law/dB'); fs=1.5:0.025:6;k=length(fs);for i=1:kfs0=fs(i);lambdas1=f/fs0;deta=((1-lambda.^2).*(1+gama-1/mu*lambda.^2)-1).^2+4*yps^2*lambda.^2.*(gama-(1/mu+1)*lambda.^2).^2;p_z2=sqrt((1+(2*ypss*lambdas1).^2)./((1-lambdas1.^2).^2+(2*ypss*lambdas1).^2));z2_q=gama*sqrt((1+4*yps^2*lambda.^2)./deta);p_q=p_z2.*z2_q;jfg_Gqddf1=4*pi^2*sqrt(Gqn0*n0^2*ua)*f;jfg_Ga1f=p_q.*jfg_Gqddf1;kk1=W_f.^2.*jfg_Ga1f.^2;aww(i)=sqrt(trapz(f,kk1));endLaw2=20*log10(aww/a0);figure(9)plot(fs,aww);title('aw随fs的变化'),xlabel('“人体—座椅”系统的固有频率fs'),ylabel('aw/m*s^-2');figure(10)plot(fs,Law2);title('Law随fs的变化'),xlabel('“人体—座椅”系统的固有频率fs'),ylabel('Law/dB'); %第三问:%三个响应量均方根值随f0变化的曲线ff0=0.25:0.05:3;sigmaz2=0*ff0;sigmafd=0*ff0;sigmaFd_G=0*ff0;M=length(ff0);for i=1:Mf0=ff0(i);f=detaf*(0:N);lamta=f/f0;lamtas=f/fs;deta=((1-lamta.^2).*(1+gama-1/mu*lamta.^2)-1).^2+4*yps^2*lamta.^2.*(gama-(1/m u+1)*lamta.^2).^2;z2_qdot=2*pi*f*gama.*sqrt((1+4*yps^2*lamta.^2)./deta);fd_qdot=gama*lamta.^2./(2*pi*f+eps)./sqrt(deta);Fd_Gqdot=2*pi*f*gama/g.*sqrt(((lamta.^2/(mu+1)-1).^2+4*yps^2*lamta.^2)./deta);Gq_dotf=4*pi^2*Gqn0*n0^2*ua;Gz2f=(z2_qdot).^2*Gq_dotf;Gfd_qf=(fd_qdot).^2*Gq_dotf;GFd_Gf=(Fd_Gqdot).^2*Gq_dotf;sigmaz2(i)=sqrt(trapz(f,Gz2f));sigmafd(i)=sqrt(trapz(f,Gfd_qf));sigmaFd_G(i)=sqrt(trapz(f,GFd_Gf));if f0==1.5sgmz2=sigmaz2(i);sgmfd=sigmafd(i);sgmFd_G=sigmaFd_G(i);endendsz2=20*log10(sigmaz2/sgmz2);sfd=20*log10(sigmafd/sgmfd);sFd_G=20*log10(sigmaFd_G/sgmFd_G);plot(ff0,sz2,'r-',ff0,sfd,'b-.',ff0,sFd_G,'k--');l egend('σz2','σfd','σFd/G');gtext('σz2');gtext('σfd');gtext('σFd/G');axis([0.25 3 -25 15]);title('三个响应量均方根值随f0变化的曲线'),xlabel('车身部分固有频率f0/Hz'),ylabel('σz2/dB,σfd/dB,σFd/G/dB');%三个响应量均方根值随δ变化的曲线c=(0.5-0.125)/180;yps0=0.125:c:0.5;sigmaz2=0*yps0;sigmafd=0*yps0;sigmaFd_G=0*yps0;M=length(yps0);for i=1:Myps=yps0(i);f=detaf*(0:N);lamta=f/f0;lamtas=f/fs;deta=((1-lamta.^2).*(1+gama-1/mu*lamta.^2)-1).^2+4*yps^2*lamta.^2.*(gama-(1/m u+1)*lamta.^2).^2;z2_qdot=2*pi*f*gama.*sqrt((1+4*yps^2*lamta.^2)./deta);fd_qdot=gama*lamta.^2./(2*pi*f+eps)./sqrt(deta);Fd_Gqdot=2*pi*f*gama/g.*sqrt(((lamta.^2/(mu+1)-1).^2+4*yps^2*lamta.^2)./deta);Gq_dotf=4*pi^2*Gqn0*n0^2*ua;Gz2f=(z2_qdot).^2*Gq_dotf;Gfd_qf=(fd_qdot).^2*Gq_dotf;GFd_Gf=(Fd_Gqdot).^2*Gq_dotf;sigmaz2(i)=sqrt(trapz(f,Gz2f));sigmafd(i)=sqrt(trapz(f,Gfd_qf));sigmaFd_G(i)=sqrt(trapz(f,GFd_Gf));if yps==0.25sgmz2=sigmaz2(i);sgmfd=sigmafd(i);sgmFd_G=sigmaFd_G(i);endendsz2=20*log10(sigmaz2/sgmz2);sfd=20*log10(sigmafd/sgmfd);sFd_G=20*log10(sigmaFd_G/sgmFd_G);plot(yps0,sz2,'r-',yps0,sfd,'b-.',yps0,sFd_G,'k--');axis([0.125 0.5 -4 4]);title('三个响应量均方根值随δ变化的曲线'),xlabel('车身部分阻尼比δ'),ylabel('σz2/dB,σfd/dB,σFd/G/dB');legend('σz2','σfd','σFd/G');gtext('σz2');gtext('σfd');gtext('σFd/G');%三个响应量均方根值随γ变化的曲线gama0=4:0.1:19;sigmaz2=0*gama0;sigmafd=0*gama0;sigmaFd_G=0*gama0;M=length(gama0);for i=1:Mgama=gama0(i);f=detaf*(0:N);lamta=f/f0;lamtas=f/fs;deta=((1-lamta.^2).*(1+gama-1/mu*lamta.^2)-1).^2+4*yps^2*lamta.^2.*(gama-(1/m u+1)*lamta.^2).^2;z2_qdot=2*pi*f*gama.*sqrt((1+4*yps^2*lamta.^2)./deta);fd_qdot=gama*lamta.^2./(2*pi*f+eps)./sqrt(deta);Fd_Gqdot=2*pi*f*gama/g.*sqrt(((lamta.^2/(mu+1)-1).^2+4*yps^2*lamta.^2)./deta);Gq_dotf=4*pi^2*Gqn0*n0^2*ua;Gz2f=(z2_qdot).^2*Gq_dotf;Gfd_qf=(fd_qdot).^2*Gq_dotf;GFd_Gf=(Fd_Gqdot).^2*Gq_dotf;sigmaz2(i)=sqrt(trapz(f,Gz2f));sigmafd(i)=sqrt(trapz(f,Gfd_qf));sigmaFd_G(i)=sqrt(trapz(f,GFd_Gf));if gama==9sgmz2=sigmaz2(i);sgmfd=sigmafd(i);sgmFd_G=sigmaFd_G(i);endendsz2=20*log10(sigmaz2/sgmz2);sfd=20*log10(sigmafd/sgmfd);sFd_G=20*log10(sigmaFd_G/sgmFd_G);figure(13)plot(gama0,sz2,'r-',gama0,sfd,'b-.',gama0,sFd_G,'k--');axis([4 18 -5 6]);title('三个响应量均方根值随γ变化的曲线'),xlabel('悬架与轮胎的刚度比γ'),ylabel('σz2/dB,σfd/dB,σFd/G/dB');legend('σz2','σfd','σFd/G');gtext('σz2');gtext('σfd');gtext('σFd/G');mu0=5:0.1:20;sigmaz2=0*mu0;sigmafd=0*mu0;sigmaFd_G=0*mu0;M=length(mu0);for i=1:Mmu=mu0(i);f=detaf*(0:N);lamta=f/f0;lamtas=f/fs;deta=((1-lamta.^2).*(1+gama-1/mu*lamta.^2)-1).^2+4*yps^2*lamta.^2.*(gama-(1/m u+1)*lamta.^2).^2;z2_qdot=2*pi*f*gama.*sqrt((1+4*yps^2*lamta.^2)./deta);fd_qdot=gama*lamta.^2./(2*pi*f+eps)./sqrt(deta);Fd_Gqdot=2*pi*f*gama/g.*sqrt(((lamta.^2/(mu+1)-1).^2+4*yps^2*lamta.^2)./deta);Gq_dotf=4*pi^2*Gqn0*n0^2*ua;Gz2f=(z2_qdot).^2*Gq_dotf;Gfd_qf=(fd_qdot).^2*Gq_dotf;GFd_Gf=(Fd_Gqdot).^2*Gq_dotf;sigmaz2(i)=sqrt(trapz(f,Gz2f));sigmafd(i)=sqrt(trapz(f,Gfd_qf));sigmaFd_G(i)=sqrt(trapz(f,GFd_Gf));if mu==10sgmz2=sigmaz2(i);sgmfd=sigmafd(i);sgmFd_G=sigmaFd_G(i);endendsz2=20*log10(sigmaz2/sgmz2);sfd=20*log10(sigmafd/sgmfd);sFd_G=20*log10(sigmaFd_G/sgmFd_G);figure(14)plot(mu0,sz2,'r-',mu0,sfd,'b-.',mu0,sFd_G,'k--'); axis([5 20 -2 2]);title('三个响应量均方根值随μ变化的曲线'),xlabel('车身与车轮部分质量比μ'),ylabel('σz2/dB,σfd/dB,σFd/G/dB'); legend('σz2','σfd','σFd/G');gtext('σz2');gtext('σfd');gtext('σFd/G');计算结果:第一问结果:路面不平度加速度均方根值为0.3523车轮加速度均方根值为0.2391车身加速度均方根值为0.0168人体加速度均方根值为0.0161加权加速度均方根值为0.0100加权振级80.0291第二问的答案:第三问答案:。
汽车理论第六章课后答案

余志生汽车理论第六章课后习题答案6.l 、设通过座椅支承面传至人体垂直加速度的谱密度为一白噪声,Ga ( f )=0.132m -⋅s 。
求在0.5~80H Z 频率范围加权加速度均方根值a w 和加权振级L aw ,并由表6-2查出相应人的主观感觉。
答:21805.02])()([df f G f W a a w ⎰⋅=805.125.1244225.05.121.011.041.0*5.0[dff df df f df ⎰⎰⎰⎰+⋅⋅+⋅⋅+⋅=28.24=⇒)(200a a Lg L waw=70.147)1028.24(206==-Lg查173P 图知:人的主观感觉为极不舒适。
6.2、设车速u =20m /s ,路面不平度系380q 10*56.2)(G m n -=,参考空间频率n o =0.1-1m 。
画出路面垂直位移、速度和加速度)(G q f 、)(G q f 、)(G q f 的谱图。
画图时要求用双对数坐标,选好坐标刻度值,并注明单位。
解:228220q 20*1.0*10*56.2)()(G f f u n n G f q -==29110*12.5f-= 20*1.0*10*56.2*4)(4)(G 282202q -==ππu n n G f q-710*2.02=22842204q *1.0*10*56.2*16)(16)(G f uf n n G f q -==ππ 2-710*99.3f =画出图形为:6.3、设车身-车轮二自由度汽车模型,其车身部分固有频率f o =2Hz 。
它行驶在波长λ=5m 的水泥接缝路上,求引起车身部分共振时的车速u n (km/h)。
该汽车车轮部分的固有频率f t =10Hz ,在砂石路上常用车速为30km/h 。
问由于车轮部分共振时,车轮对路面作用的动载所形成的搓板路的波长λ=?答:①当激振力等于车辆固有频率时,发生共振,所以发生共振时的车速为:2*5u 0a =⋅=f λs m /10=②搓板路的波长 :m 65106.3/30==λ6.4、设车身单质量系统的幅频 |z /q | 用双对数坐标表示时如习题图6所示。
汽车理论 余志生 第六章

2)辅助评价方法
辅助评价方法能更好地估计偶尔遇到 过大的脉冲引起的高峰值系数振动对人体 的影响。
三、路面不平度的统计特性
1.路面不平度由三部分组成: 1)超低频成分 整段路面上存在着的波长远大于
轴距的起伏波形。 整段路面上存在着的、宏观上可 察觉的、波长及幅值较大的路面凹凸不平。
2)中低频成分
这是引起汽车振动的主要频率成分, 称为主频带。 3)高频成分 不易察觉的、波长很短、幅值很小的
振动的发生源主要 有凹凸不平的路面,不平衡轮胎的旋转,不平衡传动轴的旋 转以及发动机的扭矩变化等。
2.振动的传递途径 (1)振动的激励源
这些因素引起的振动大多与车速 相关,尤其是凹凸不平路面引起的振动, 随着车速的变化,振动的频率和强弱会 产生相应的变化。
(2) 振动的传递途径
因路面、轮胎产生的振动,先传到悬架,受悬架
2.使用因素对汽车平顺行驶的影响 1)道路坎坷不平是引起汽车振动的主要 因素 2)汽车技术状况对平顺性的影响
自身的振动特性影响后再传给车身,通过车身传到乘客的脚部。同时通 过座椅传给乘客的臀部和背部,还通过转向系,以转向盘抖动的形式传 到驾驶员手部。
因发动机、传动系产生的振动,通过支承发动
机、变速器和传动轴的缓冲橡胶块,经衰减后传给车身,再经上述途径 传至人体各个部位。
任何一个“振动系统”均有一个“固有 频率”。当外界激振信号的频率接近或等于 “固有频率”时,将出现“共振”现象,产生 剧烈的振动。
Ride performance
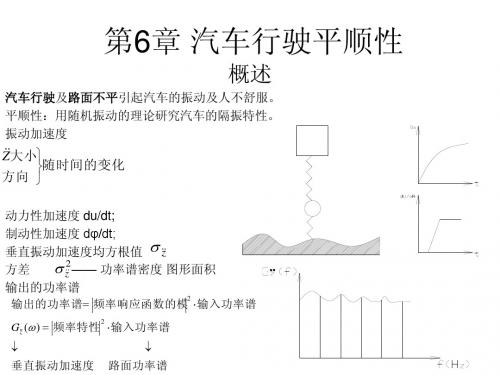
第六章 汽车的平顺性 1. 汽车行驶平顺性 指汽车不因车体振动而使乘客感到不
适或货物不因振动而受损的性能。
2. 汽车行驶平顺性的研究对象:“路面一汽 车一人(货物)”构成的系统。路面特性是系统 的输入,人(货物)对汽车振动的反应是系统的 输出。
汽车理论第6章 汽车的平顺性2016

16
a(t)
aw(t)
加权函数w(f )的滤波网络 根据IS02631-1:1997(E)设定系数
2016/4/12
汽车理论 wangjx@
四、平顺性的评价方法
(一)基本的评价方法
2. 对记录的加速度时间历程 间 程a(t)进行频谱分 行 谱 析得到功率谱密度函数 Ga f
汽车理论 Automotive theory
第六章
汽车的平顺性
内容概要
平顺性的基本概念 路面不平度输入 人体对振动的反应以及平顺性评价方法 平顺性研究基本方法、两自由度振动系 平顺性研究基本方法 两自由度振动系 统 主动悬架(了解)
2016/4/12
汽车理论 wangjx@
11
靠背
脚
2016/4/12
汽车理论 wangjx@
三、人体对振动的反应
人体对不同频率的振动敏感程度不同 1.
zs 最敏感的频率范围是4~12.5Hz
在4~8Hz频率范围,人的内脏器官产生共振 频率范围 人的内脏器官产生共振 8~12.5Hz频率范围,对人的脊椎系统影响很大
2016/4/12 汽车理论 wangjx@
wi是功率谱密度为0.1的 白噪声 (Simulink Si i 中的缺省值)
7
二、路面不平度输入
nc =0.01(cycle/m),车速为20m/s
10 10 10 10 10 10 10
-2 -3 -4 -5 -6 -7 -8
评价方法: 评价方法
根据乘员舒适程度评价
2016/4/12 汽车理论 wangjx@
4
第六章 汽车的平顺性(汽车理论)
一、汽车振动系统的简化
2.4个自由度模型
汽车对称于其纵轴线,且左、右车辙的不平度函数相等: 悬挂质量:车身+车架+车架上的总成 m2-2自由度 (垂直、俯仰) 减振器+悬架弹簧 非悬挂质量:车轮+车轴 m1-2自由度 (垂直)
两个系统动力学等效的条件
原系统车身对其 质心的回转半径
3.2个自由度模型
由表6-1上各轴向的轴加权系数可以看出: (1) 椅面输入点xs、ys、zs三个线振动的轴加权系数k=1, 是12个轴向中人体最敏感的,其余各轴向的轴加权系数均小 于0.8。 (2)另外IS02631—1:1997(E)标准还规定,当评价振动对 人体健康的影响时,就考虑xs、ys、zs这三个轴向,且xs、ys 两个水平轴向的轴加权系数取k=1.4,比垂直轴向更敏感。 (3)标准还规定靠背水平轴向xb、yb可以由椅面xs、ys水 平轴向代替,此时轴加权系数取k=1.4。 (4)因此,我国在修订的相应标准GB/T4970--1996《汽 车平顺性随机输入行驶试验方法》时,评价汽车平顺性就考 虑椅面xs、ys、zs这三个轴向。
三、汽车单自由度振动系统的传递特性
实际上,幅频特性是线性 系统对不同频率下输入正 弦波的振幅放大的倍数
原系统车身对其 质心的回转半径
一、汽车振动系统的简化
4.1个自由度模型 轮胎在低频区内5Hz以下,忽略轮胎的弹性与车轮的 质量。
是m2的坐标,是振 动系统的输出
q道路不平度,是时间函 数,振动系统的输入
单自由度振动系统的自由振动方程
单自由度振动有阻尼振动的解,图中说 明有阻尼振动是振幅逐渐减小的振动
道路不平度的时间功率谱密度函数
道路垂直速度的功率谱密度函数
道路垂直加速度的功率谱密度函数
汽车理论第六章

u v
因此有 同理有
ax
u v
t
du dt
v d
dt
u vr
ay
v u
t
dv dt
u d
dt
v ur
对二自由度汽车模型进行受力分析,外力沿y轴 方向的合力以及绕质心的力矩分别为
FY FY1 cos FY 2
M Z aFY1 cos bFY 2
b r
u
整理得
FY
k1(
ar
u
) k2(
br )
u
MZ
ak1 (
a r
u
) bk2 (
br )
u
由牛顿定理
FY
k1(
a r
u
) k2(
br
u
) m(v ur )
MZ
ak1 (
且忽略左、右侧车轮由于载荷的变化引起的轮胎特性的改变以及轮胎回正力 矩的作用; • 6)汽车运动时的驱动力不大,因此不考虑地面切向力对轮胎特性的影响; • 7)不考虑空气动力的作用。
2、线性二 y u u
x
y r
2
V
u2
u
b
第六章 汽车的操纵稳定性
第一节 概述
• 汽车的操纵稳定性是指在驾驶者不感
到过分紧张、疲劳的条件下,汽车能遵循 驾驶者通过转向系及转向车轮给定的方向 行驶,且当遭遇外界干扰时,汽车能抵抗 干扰而保持稳定行驶的能力。
• 稳定性是指汽车抵抗改变其行驶方向
的各种外界干扰(路面扰动或风扰 动),并保持稳定行驶而不失去控制, 甚至翻车或侧滑的能力。
第六章 汽车理论
ξ大
(3)高频区
λ> 2
Z <q
ξ ↑,
z (ω ) ↑ ,一般应 ↓ ξ q (ω )
《讨论》:输入输出不同时的幅频特性
&&(ω ) z z (ω ) = ω2 q(ω ) q (ω ) & z (ω ) z (ω ) =ω q(ω ) q (ω ) &&(ω ) z z (ω ) =ω & q(ω ) q (ω ) &&(ω ) z z (ω ) = && q(ω ) q (ω )
(3)用试验方法测阻尼比ξ 数据处理 令d=(A1/A2) 减幅系数 d Ae − nt sin ... 相邻振幅比 d = − n ( t +T )
Ae d = e nT 其中nT = n ⋅
2πξ
sin ... 2π = n 2π = 2πξ 1− ξ 2
ωr
(ω0 ⋅ 1 − ξ 2 )
d =e ln d =
2.、齐次微分方程
& m2 && + Cz + Kz = 0 z C 令 = 2n m2 K 2 = ω0 m2 2 && + 2nz + ω0 z = 0 & z 2 z = Ae − nt sin( ω0 − n 2 t + α )
ω0:系统固有频率 (1)有阻尼固有振动频率 ωr
ωr = ω02 − n 2 = ω0
2 (ω0 ) 2 + (2nω ) 2 z (ω ) = 2 q (ω ) (ω0 − ω 2 ) 2 + (2nω ) 2
令
ω = λ — —频率比 ω0 1 + j 2ξλ z (ω ) = q (ω ) (1 − λ2 ) + j 2ξλ
汽车理论教程第六章汽车的平顺性

➢ xs、ys 最敏感的频率范
围是0.5~2Hz。大约在3Hz 以下,人体对水平振动比对 垂直振动更敏感,且汽车车 身部分系统在此频率范围内 产生共振,故应对水平振动 给予充分重视。
10
第一节 人体对振动的反应和平顺性的评价
各轴向的频率加权函数(渐近线)
频率加权函数
0.5 0.5Hz f 2Hz
wk
f
f / 4 2Hz f 4Hz 1 4Hz f 12.5Hz
12.5 / f 12.5Hz f 80Hz
wd
f
1 2 /
f
(0.5Hz f 2Hz)
2Hz f 80Hz
wc
f
8
1 /
f
(0.5Hz f 8Hz)
8Hz f 80Hz
we
f
1 1/
f
(0.5Hz f 1Hz)
靠背
xb yb
wc
wd
0.80 0.50
0.212
4.3
0.087
4.4
zb
wd
0.40
0.140
4.9
xf
脚
yf
wk
0.25
wk
0.25
0.090
5.4
0.093
5.1
zf
wk
0.40
0.319
6.2
1
av
a2 2 vj
0.628
16
第一节 人体对振动的反应和平顺性的评价
2.辅助评价法
➢当峰值系数 > 9时,ISO 2631-1:1997(E)标准规定用 加权加速度4次方根值评价。它能更好地估计偶尔遇到过大 的脉冲引起的高峰值系数振动对人体的影响。此时采用辅助 评价方法 —— 振动剂量值。
汽车理论课后习题答案

由(3) (6)可得:
汽车 工业 学院 版权
得R
当 a y = 0.4 g 时,由 α1 − α 2 = L ⋅ k ⋅ | a y |
R0
=2
(1)
(2)
2
(3)
(4)
⇒ d Φ = 2 kt ⋅ p ⋅ p ⋅ d Φ ⇒ k Φr = dTφ dφ = 2 kt p 2
(6)
k Φr
⎛ mp ⎞ = 2k s ⎜ ⎟ ⎝ n ⎠
⇒u=
(m/s) , (k=0,1,2,3……)
即u =
10 (2k + 1)
(m/s)
ua = 3.6 ⋅
10 36 = (2k + 1) 2k + 1
(2) 求 λ
由 f = u ⋅ n ⇒ f0 = u ⋅
⇒λ =
得: λ =
湖北
5 (2k + 1)
u 1 10 = ⋅ f 0 2 (2k + 1)
kγ = −7665 N / rad , kα = −50176 N / rad , γ = +4 0
由外倾产生的侧偏角的变化:
习题 5-2: 解答:设汽车以相同的速度和半径转弯,则汽车加装横向稳定杆前后汽车的侧翻力矩应 相同(忽略因质心偏移产生的侧翻力矩差异) 加装前:前后悬架刚度 kφr1 、 kφr 2 、 φ ,总侧翻力矩为 M φ , 则 M φ1 = kφr1 ⋅ φ , M φ 2 = kφr 2 ⋅ φ
湖北
(1) 由 S .M =
S .M 增大,增加不足转向特性;重 心后移,a 增加,S .M 减小,减少不
足转向特性; (2) 内外侧车轮负荷变化会使车轮平均
′ < k 0 ,这种变化 侧偏刚度减小, k 0
汽车理论__第6章汽车的平顺性
第二节 路面不平度的统计特性
在双对数坐标上为一斜线, 式(6-4)在双对数坐标上为一斜线,对实测路面功率谱密度拟合时, - 在双对数坐标上为一斜线 对实测路面功率谱密度拟合时, 为了减少误差, 为了减少误差,在不同空间频率范围可以选用不同的拟合系数进行 分段拟合,但不应超过4段。 分段拟合,但不应超过 段
第六章 汽车的平顺性
内容提要
人体对振动的反应和平顺性的评价 路面不平度的统计特性 汽车振动系统的简化, 汽车振动系统的简化,单质量系统的振动 车身与车轮双质量系统的振动 双轴汽车的振动 人体- 人体-座椅系统的振动 汽车平顺性试验和数据处理
引 言
汽车行驶时,由路面不平以及发动机、 汽车行驶时,由路面不平以及发动机、传动系和车轮等旋转 部件激发汽车的振动。通常, 部件激发汽车的振动。通常,路面不平是汽车振动的基本输 故本章讨论的平顺性(Ride)主要指路面不平引起的汽车 入,故本章讨论的平顺性 主要指路面不平引起的汽车 振动,频率范围约为0.5~25Hz。 振动,频率范围约为 。 汽车的平顺性主要是保持汽车在行驶过程中产生的振动和冲 击环境对乘员舒适性的影响在一定界限之内, 击环境对乘员舒适性的影响在一定界限之内,因此平顺性主 要根据乘员主观感觉的舒适性来评价, 要根据乘员主观感觉的舒适性来评价,对于载货汽车还包括 保持货物完好的性能,它是现代高速汽车的主要性能之一。 保持货物完好的性能,它是现代高速汽车的主要性能之一。 汽车的平顺性可由图6-1所示的 路面一汽车一入” 所示的“ 汽车的平顺性可由图 所示的“路面一汽车一入”系统的框 图来分析。路面不平度和车速形成了对汽车振动系统的“ 图来分析。路面不平度和车速形成了对汽车振动系统的“输 输入”经过由轮胎、悬架、座垫等弹性、 入”,此‘输入”经过由轮胎、悬架、座垫等弹性、阻尼元 件和悬挂、非悬挂质量构成的振动系统的传递, 件和悬挂、非悬挂质量构成的振动系统的传递,得到振动系 统的“输出”是悬挂质量或进一步经座椅传至人体的加速度, 统的“输出”是悬挂质量或进一步经座椅传至人体的加速度, 此加速度通过人体对振动的反应——舒适性来评价汽车的平 此加速度通过人体对振动的反应 舒适性来评价汽车的平 顺性。当振动系统的“输出”作为优化的目标时, 顺性。当振动系统的“输出”作为优化的目标时,通常还要 综合考虑车轮与路面间的动载和悬架弹簧的动挠度。 综合考虑车轮与路面间的动载和悬架弹簧的动挠度。它们分 别影响“行驶安全性”和撞击悬架限位的概率。 别影响“行驶安全性”和撞击悬架限位的概率。
汽车理论课后习题答案 第六章 汽车的平顺性

第六章6.l 、设通过座椅支承面传至人体垂直加速度的谱密度为一白噪声,Ga ( f )=0.132m -⋅s 。
求在0.5~80H Z 频率范围加权加速度均方根值a w 和加权振级L aw ,并由表6-2查出相应人的主观感觉。
答:21805.02])()([df f G f W a a w ⎰⋅=805.125.1244225.05.121.011.041.0*5.0[dff df df f df ⎰⎰⎰⎰+⋅⋅+⋅⋅+⋅=28.24=⇒)(200a a Lg L waw=70.147)1028.24(206==-Lg查173P 图知:人的主观感觉为极不舒适。
6.2、设车速u =20m /s ,路面不平度系380q 10*56.2)(G m n -=,参考空间频率n o =0.1-1m 。
画出路面垂直位移、速度和加速度)(G q f 、)(G q f 、)(G qf 的谱图。
画图时要求用双对数坐标,选好坐标刻度值,并注明单位。
解:228220q 20*1.0*10*56.2)()(G f f u n n G f q -==29110*12.5f-= 20*1.0*10*56.2*4)(4)(G 282202q -==ππu n n G f q-710*2.02=22842204q *1.0*10*56.2*16)(16)(G f uf n n G f q -==ππ 2-710*99.3f =画出图形为:6.3、设车身-车轮二自由度汽车模型,其车身部分固有频率f o =2Hz 。
它行驶在波长λ=5m 的水泥接缝路上,求引起车身部分共振时的车速u n (km/h)。
该汽车车轮部分的固有频率f t =10Hz ,在砂石路上常用车速为30km/h 。
问由于车轮部分共振时,车轮对路面作用的动载所形成的搓板路的波长λ=?答:①当激振力等于车辆固有频率时,发生共振,所以发生共振时的车速为:2*5u 0a =⋅=f λs m /10=②搓板路的波长 :m 65106.3/30==λ6.4、设车身单质量系统的幅频 |z /q | 用双对数坐标表示时如习题图6所示。
汽车理论第六章 修改
第二节 汽车转向运动学和动力学
一、无侧偏时的转向运动
cot1
co t 2
OG L
OD L
d L
1 2
2
L
R0 tan
R0
L
二、有侧偏时的转向运动
tan(
1)
AD OD
tan 2
BD OD
R
L
2 1
L R
1
2
三、转向时的受力分析
数。随着汽车行驶车速的变化,汽车的稳态响应可以
按照稳定性因数 K 的数值分为中性转向,不足转向
和过度转向三类。
当k>0时,汽车为不足转向; 当k=0时,汽车为中性转向; 当k<0时,汽车为过多转向;
中性转向K
0;r
u L
特征车速
r u L
u/L 1 Ku2
uch u
a r
u
) k2(
br
u
) m(v ur )
MZ
ak1 (
a r
u
) bk2 (
br )
u
I Z r
二、前轮角阶跃输入下汽车的瞬态响应
横摆角速度
T
r1
r0
1.05 r 0
r (t)
0.95 r 0
反应时间
t
稳定时间
量进行评价和分析。汽车操纵稳定性的研
究主要是分析汽车作曲线运动时的响应,
并以相关的物理量来表征汽车的操纵稳定 性能。
二、驾驶员-汽车系统
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二节 汽车转向运动学和动力学
一、无侧偏时的转向运动
cot1
co t 2
OG L
OD L
d L
1 2
2
L
R0 tan
R0
L
二、有侧偏时的转向运动
tan(
1)
AD OD
tan 2
BD OD
R
L
2 1
L R
1
2
三、转向时的受力分析
一、汽车稳态转向特性
稳态转向时横摆角速度增益
u
u
u
u
r
)s
R
L R
1
2
R
L
m(
a
b u2 )
R L k2 k1 R
L
1
m L2
(a k2
b )u 2 k1
L 1 Ku 2
稳定性因数
K
m L2
a ( k2
b )
k1
二、稳态转向类型
稳定性因数 K 是表征汽车稳态响应的一个重要的参
量进行评价和分析。汽车操纵稳定性的研
究主要是分析汽车作曲线运动时的响应,
并以相关的物理量来表征汽车的操纵稳定 性能。
二、驾驶员-汽车系统
汽车操纵稳定性的研究对象是将 驾驶人包括在内,进行包含驾驶人反 馈的汽车响应研究
• 人-车闭环系统
三、汽车操纵稳定性试验的评价方法
• 对试验中汽车性能的评价可分为主观评价和客观 评价两种。
临界车速
r u/L
1 Ku2
u L
ucr
u
三、表征稳态响应的参数 1)前、后轮侧偏角绝对值之差 (1 2 )
FY1
mL2 L
ay
FY 2
mL1 L
ay
1 2 0 K 0 1 2 0 K 0 1 2 0 K 0
1 2 Kay L
L
3)静态储备系数S.M
使汽车前后轮产生相同侧偏角的
侧向力作用点 中性转向点Cn
静态裕度
SM a`-a L
a`中性转向点至前轴的距离;
a 质心至前轴的距离
FY 2
Fy
FY1
Cn C
a
a`
L
四、影响汽车稳定响应的一些使用参数
1. 轮胎气压
K
m L2
a (
k2
b )
k1
K
m L2
直位移、俯仰以及侧倾均为零; • 3)汽车内、外侧车轮的转向角以及侧偏角相等; • 4)汽车行驶的车速不变; • 5)汽车的侧向加速度限定在0.4g以下,因此轮胎的侧偏特性可以简化为线性,
1-2
1 2 Kay L
K 0中性转向
ay
K 0过度转向
a y 0.3 ~ 0.4g,1 2与a y不再为线性关系 和r急剧变化,出现半径迅速增加或减小的现象。 a y对1 2关系用斜率表示,斜率 0 不足转向 反之,则为过度转向
1- 2与R的关系
a ( k2
b) k1
K
K
m L2
a (
k2
b ma
k1
)
L2
(
k2
b
mb
k1 ) L2 ( k1
b )
k1
2. 装载质量
载荷与侧偏力的关系
K K 0
K
K
m L2
a (
k2
b m a
k1
)
L2
(
k2
b
m b
k1 ) L2 ( k1
数。随着汽车行驶车速的变化,汽车的稳态响应可以
按照稳定性因数 K 的数值分为中性转向,不足转向
和过度转向三类。
当k>0时,汽车为不足转向; 当k=0时,汽车为中性转向; 当k<0时,汽车为过多转向;
中性转向K
0;r
u L
特征车速
r u L
u/L 1 Ku2
uch u
r
u/L 1 Ku 2
r
Ku 2 r
u / L
u
1
发生变化或不变2源自2)转向半径之比 R / R0
1 2=0
R=R0 ,
R / R0
1 2 0
R R0 1
中性转向
u2
过多转向
转 向 半 径 比 值
FY 2
Fy
FY1
Cn C
L1
L1
的各种外界干扰(路面扰动或风扰 动),并保持稳定行驶而不失去控制, 甚至翻车或侧滑的能力。
一 汽车坐标系
• 汽车坐标系及其描述
r横摆角速度( yaw) w垂直速度
p侧倾角速度(roll ) q俯仰角速度( pitch)
u前进速度
侧向速度
• 汽车操纵稳定性是汽车的主要性能之一。 汽车操纵稳定性可以借助一些相关的物理
• 主观评价法指让试验评价人员根据试验时自己的 感觉进行评价的方法。
• 客观评价法是通过测试一起测出能够表征汽车操 纵稳定性能的参数,如横摆加速度、侧向加速度 以及侧倾角等来评价操纵稳定性的方法。
汽车操纵稳定性的主观评价是驾驶 人根据不同的驾驶任务操纵汽车时,依据 对操纵动作难易程度的感觉来对汽车进行 评价,即驾驶人对汽车的易操纵性所进行 的评价。
FY1
mu2 R
b L
cos
1
mu2 R
b L
FY 2
mu2 R
a L
1
m L
b k1
u2 R
2
m L
a k2
u2 R
第三节 汽车的稳态转向
汽车的等速直线运动就是一种稳态。如 果在等速直线运动时,给汽车一个转向盘角 阶跃输入,即一个定值的方向盘转角,汽车 将经短暂的时间后进入等速圆周运动,即进 入稳态转向(稳态响应)过程。
通常指定一组评价者,一般为10- 25名,用统计的方法来获得评价结果。
汽车操纵稳定性的主观评价包含不同 驾驶任务的多项目评价和总评价。
评价项目可分为:直线行驶稳定性 (包括转向回正能力、侧风敏感性、路向 不平敏感性等)、行车变道的操纵性、转 弯稳定性(包括转向的准确性、固有转向 特性、转弯制动特性等)以及操纵负荷等。
第六章 汽车的操纵稳定性
第一节 概述
• 汽车的操纵稳定性是指在驾驶者不感
到过分紧张、疲劳的条件下,汽车能遵循 驾驶者通过转向系及转向车轮给定的方向 行驶,且当遭遇外界干扰时,汽车能抵抗 干扰而保持稳定行驶的能力。
• 操纵性是指汽车能够确切地响应
驾驶员指令的能力。
• 稳定性是指汽车抵抗改变其行驶方向
b )
k1
汽车装载质量增大后将使得汽车稳定性 因数 的数值降低,极限情况下将使得 ,汽
车稳态响应特性变为过多转向,使汽车的操 纵稳定性变坏。这也是一些超载汽车经常发 生车祸的直接原因之一。
第四节 前轮角阶跃输入下汽 车的瞬态响应
一、线性二自由度汽车模型的运动方程
1、基本假设
(1)忽略汽车的转向系,因此直接以前轮转角作为汽车系统的输入; • 2)忽略汽车悬架系统,认为汽车车厢只作平行于地面的运动,因此汽车的垂