结构图等效变换规则
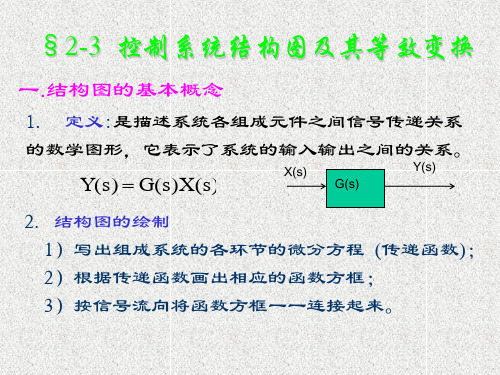
控制系统的结构图及其等效变换
2.
通路
沿支路箭头方向穿过各相 连支路的路径。
前向通路
从源节点到阱节点的通路上通过任何节点
不多于一次的通路。前向通路上各支路增益之 乘积,称前向通路总增益,一般用pk表示。
回路
起点与终点重合且通过任何节点不多于一次的
闭合通路。回路中所有支路增益之乘积称为回 路增益,用Lk表示。
不接触回路
相互间没有任何公共节点的回路
反馈通路断开。 系统开环传递函数:前向通道传递函数与反馈通道传 递函数的乘积。
B( s ) Gk ( s) G1 ( s)G2 ( s) H ( s) E (s)
(反馈信号B(s)和偏差信号E (s)之间的传递函数)
系统的开环传递函数
GK (s) G1 (s)G2 (s) H (s)
注:开环传递函数并非指开环控制系统的传递函数, 而是指闭环系统断开反馈点后整个环路的传递函数。
例2.9 简化下图,求出系统的传递函数。
解: 上图是具有交叉连接的结构图。为消除交叉,可采 用比较点、引出点互换的方法处理。 (1)将相加点a移至G2之后
(2)再与b点交换
(3)因 G4与G1G2并联, G3与G2H是负反馈环节
(4)上图两环节串联,函数相乘后得系统的传递函数为
注: ①以上为原系统的闭环传递函数,不是开环系统的传递函数, 而是闭环系统简化的结果; ②分母中不能看成原闭环系统的开环传递函数,闭环系统开 环传递函数应根据定义和具体框图定。
闭环系统的传递函数
反馈控制系统的典型结构 :
R( s) E (s) G1(s) B(s)
N (s)
G2(s)
C (s)
H(s)
输入量R(s)、干扰量N(s)同时作用于系统
系统结构图及等效变换、梅森公式
05
结论与展望
BIG DATA EMPOWERS TO CREATE A NEW
ERA
研究结论
• 通过分析和比较不同系统结构图的特点和性能,本文得出了一些重要的结论。首先,等效变换在系统分析和设 计中具有重要的作用,它可以帮助我们简化复杂的系统结构,降低分析和设计的难度。其次,梅森公式是一种 有效的系统性能评估方法,它可以用于计算系统的传递函数和频率响应等关键性能指标。最后,通过实例分析 和仿真验证,本文证明了等效变换和梅森公式在系统分析和设计中的有效性和实用性。
案例一
分析一个简单的RC电路,利用梅 森公式计算其传递函数,并与实 验结果进行对比分析。
案例二
针对一个控制系统,利用梅森公 式分析其稳定性,并给出相应的 控制器设计建议。
案例三
考虑一个复杂的信号流图,利用 梅森公式进行化简,得到简化的 数学模型,便于后续分析和设计。
BIG DATA EMPOWERS TO CREATE A NEW ERA
案例分析
案例一
串联等效变换的应用。在某控制系统中,存在两个串联的控制器,通过串联等效变换,可以将这两个控制器 合并为一个等效控制器,从而简化系统分析。
案例二
并联等效变换的应用。在某电力系统中,存在两个并联的电源,通过并联等效变换,可以将这两个电源合并 为一个等效电源,方便进行系统性能评估。
案例三
反馈等效变换的应用。在某通信系统中,存在一个反馈环节,通过反馈等效变换,可以将该反馈环节进行简 化,使得简化后的系统与原系统在性能上保持一致。
系统结构图及等效变换、
BIG DATA EMPOWERS TO CREATE A NEW
动态结构图及其等效变换
22
N1 +
解:
(2)求C/N1,设R=0,N2=0, 得右图。
C(s) G3(1 G2 ) N1(s) 1 G2 G1G2G3
23
解(3)求C(s)/N2(s),设R=0,N1=0,得下图。
则:
0 N2(s) C(s)
C(s) 1 N2 (s)
24
X(s)
X(s)
R(s)
C(s)
R(s)
C(s)
Y(s)
C(s) R(s) X (s) Y (s)
Y(s)
C(s) R(s) Y (s) X (s)
7. 相邻的比较点和引出点之间可以调换位置,如下图 所示。
17
相邻引出点之间的移动
R(s)
R(s)
R(s)
R(s) C(s)
R(s)
R(s) R(s)
动态结构图及其等效变换
1
§ 2.3 动态结构图及其等效变换
一、动态结构图(方块图) 1.定义
动态结构图是图形化的数学模型,它是一种系 统输入和输出之间因果关系的简略图示方法,表示 了系统输出、输入信号之间的动态传递关系。
2
2. 组成要素 传递方块: 表示输入、输出信号之间的传递关系 C(s)=G(s)E(s),B(s)=H(s)C(s)
(s) )
RI CsU
(s) I(s) c (s) Uc (
s)
1 R
U r
1 Cs
( I
s) (s)
U
c
(
s)
绘制上式各子方程的方框图:
r ( s ) r ( s ) - c ( s ) r ( s ) - c ( s ) I ( s ) I ( s ) c ( s )
控制系统结构图及其等效转换
U (s) R I(s)
0 2
1 c
i dt R i
2
1 1
R I (s)
1 1
1 Cs
I (s )
2
由 (1) 式有
I1(s) + I(s)
+ I (s) 2
对 (2)式变换 1 I1 ( s ) [U i ( s ) U 0 ( s )] R
对(4)式变换 I 2 ( s) R1CsI1 ( s)
G7
解 : 将分支点 A移至B处
G6 G1 G2
-
-
G3 G4 G5
G4
G7 得系统的闭环传递函数为
G1G2 G3G4 (S ) 1 + G1G2G3G4 G7 + G3G4G5 + G2 G3G6
另外亦可把B点后移或者相加点后移
X1(s) G1(s)
X3(s) G2(s)
X2(s)
结论:二环节串联传递函数等于二传函之积。 推广:N环节串联,传递函数等于N个环节传 函之积。
G(s) G1 (s)G2 (s)G n (s)
2、并联连接的传递函数
X3(s) G1(s) + X2(s)
X1(s)
+
G2(s) X4(s)
X 2 (s) X 3 ( s) + X 4 ( s) G(s) G1 ( s) + G2 ( s) X1 (s) X 1 ( s)
+ UI(s) U0(s)
1/R I1(s) I2(s) Cs
R1 I1(s)
对(3)式有
I(s)
R2
U0(s)
Ui(s) U0(s) -
I1(s)
自控-第二章
由此得到 G ( s )
§2-3 控制系统的结构图与信号流图
2. 结构图的等效变换 (4) 用梅森(Mason)增益公式求传递函数 例三:
② 求 GN ( s)=
C (s) N ( s)
不变
P 1 K5 s(Ts 1)
1 1
得出
GN (s)
§2-3 控制系统的结构图与信号流图
2. 结构图的等效变换 (4) 用梅森(Mason)增益公式求传递函数 例四: H
§2-2 传递函数
1. 定义:零初始条件下,系统输出量拉氏变换与输入量拉 氏变换之比,称为传递函数。(P.29)
r(t )
—
g1 (t )
f (t )
g 2 (t )
c(t )
R( s )
—
G1 ( s )
F (s)
G2 (s)
C( s)
R( s )
G ( s)
C( s)
C ( s) 则:G ( s )= R( s)
2. 结构图的等效变换 (4) 用梅森(Mason)增益公式求传递函数 例五:求 Uc /U r
R
ur
i1
ua
C
R
i2
ub
C
R
i3
C
uc
§2-3 控制系统的结构图与信号流图
2. 结构图的等效变换 (4) 用梅森(Mason)增益公式求传递函数 例四: 解:将电路图转化为系统结构图
UR
Ua
1 I1 R
L =-G G H G G H G G H L L G G H G G H
b c 2 3 2 4 5 3
G1G2G3G4G5G6 H2
3-4方块图及动态系统的构成
C (s)
多回路系统结构图
G1G2G3G4 C ( s) GB ( s) R( s) 1 G2G3 H 2 G3G4 H 3 G1G2G3G4 H1
思考:第一步的变换也可采用其它的 移动办法。
例 将两级RC网络串联的结构图化简,并求出此网络 的传递函数 G ( s) 。
N ( s)
R(s)
E (s ) G ( s ) 1
H (s)
C (s )
G2 ( s )
B( s )
图1
图1 闭环控制系统典型结构
当H (s)=1时,称为单位反馈控制系统
当
系统的开环传递函数
一、系统的开环传递函数 在图1中,断开系统的主反馈通路,这时前向通路传递 函数与反馈通路传递函数的乘积,称为该系统的开环 传递函数。
Ur
1 R1
1 C1s
1 R2
1 C2 s
Uc
两级RC串联网络的结构图
Ur
1 R1
1 C1s
1 R2
1 C2 s
Uc
R1
C2 s
Ur
1 R1
1 C1s
(a)
1 R2
1 C2 s
Uc
R1
C2 s
Ur
1 R1
1 C1s
1 R2
1 C2 s
Uc
Ur
(a)
1 R1C1s 1
G2 (s)
…
C (s )
n个环节依次并联
Cn (s)
Gn (s)
(a)
的等效传递函数, 等于n个传递函数 的代数和。
自动控制原理02结构图及其等效变换

R( s )
G 1 G 2 G3G 4 C (s) 1 G 1 G 2 G3G 4 G 2 G3 H 1 G3G 4 H 2
f)
2.3 控制系统的结构图及等效变换
2.3.4 系统传递函数
典型闭环控制系统
N (s)
R( s )
E ( s)
G1 (s)
结构图。
2.3.2 结构图的建立
例2-7 RLC电路网络的结构图
解: U (s) U (s) U (s) U (s) i R L 0
U R ( s) RI ( s)
U L ( s) LsI ( s)
{
I ( s)
U i ( s) U 0 ( s ) U R ( s ) U L ( s )
C 传输到 ( s)
单位反馈: H ( s) 1 开环传递函数:
G( s) H ( s)
2.3.3 结构图的等效变换和简化
(4)比较点的移动
R1 (s)
G(s)
R2 ( s )
a)
C (s)
R2 ( s )
R1 (s)
G(s)
C (s)
1/ G(s)
b)
R1 (s)
R2 ( s )
a)
G(s)
C (s) G(s) ( s) R( s) 1 G ( s) H ( s )
2.3.3 结构图的等效变换和简化
反馈连接中的术语:
R( s)
E (s)
G (s)
H (s)
C (s)
B( s)
前向通道:信号从 R( 传输到 s) 反馈通道:信号从
的通道 C ( s) 的通道 R( s )
R(s)
结构图的等效变换

示:
N (s)
R(s) E(s) G1(s)
-
+ G2 (s) C(s)
H (s)
图中,R(s),C(s) 为输入、输出信号,E(s)为系统的偏差,N (s)
为系统的扰动量,这是不希望的输入量。
由于传递函数只能处理单输入、单输出系统,因此,我们分别求
R(s) 对C(s)和 N (s)对C(s)的传递函数,然后叠加得出总的输出
结构图的基本概念
一、结构图的基本概念:
我们可以用结构图表示系统的组成和信号流向。在引入传 递函数后,可以把环节的传递函数标在结构图的方块里,并把 输入量和输出量用拉氏变换表示。这时Y(s)=G(s)X(s)的关系可 以在结构图中体现出来。
[定义]:表示变量之间数学关系的方块图称为函数结构图或方 块图。
I(s) 1 u(s)
C1s [u(s) uo (s)]
1 R2
I 2 (s)
IS20a2t2(u0srd)ay, JCan12usary04u, o (s)
ui (s)
1
-
R1
I1(s)
u(s) I(s)
-
I1(s)
I2 (s)
I (s)
1 C1s
u(s)
u(s)
1
-
R2
uo (s)
I2 (s)
I2 (s)
1 C2s
uo (s)
12
结构图等效变换例子||例2-11
总的结构图如下:
ui (s)
-
1 I1(s) - 1 u(s)
R1
I (s) C1s
-
1
1 uo (s)
R2 I2(s) C2s
动态结构图的等效变换和化简
等 R(s)
效
C(s) G(s)
1Gs
B(s)
Cs
Rs
GBssGs
RsGs Bs
二、综合点的移动和互移
(二)综合点后移
R(s)
B(s)
C(s) G(s)
Cs Rs BsGs
等 R(s) 效
B(s)
G(s) G(s)
C(s)
Cs RsGs BsGs
二、综合点的移动和互移
(三)综合点互移
R(s)
C(s)
G(s)
等
R(s)
效
Cs RsGs
R(s)
C(s)
G(s)
R(s)
11GGss
Cs RsGs
三、引出点的移动和互移
(三)引出点互移
R(s)
R(s)
等 R(s)
R(s)
效
例题
试化简下图所示两级RC电路的动态结构图,并求出传 递函数。
Ui s
1
R1
-
-
1 C1s
1 R2
-
Uo s
G2 (s) C2 (s)
C1s RsG1s C2s RsG2s Cs C1s C2s
Cs G1s G2sRs
结论:n个环节并联后总的传递函数是各环节传递函数的代数和。
一、环节的合并
(三)反馈连接
如下图所示,系统的输出信号C(s)在经过某个环节H(s)后,反 送到输入端,这种连接方式成为反馈连接。
R(s)
C(s)
B(s) D(s)
Cs Rs Bs Ds
等
R(s)
C(s)
效
D(s) B(s)
Cs Rs Ds Bs
三、引出点的移动和互移
系统的结构图及其等效变换
控制系统的结构图及其等效变换项目内容学习目的掌握结构图的化简方法。
重点熟练掌握结构图化简求取传递函数的方法。
难点典型结构变换、结构图化简方法的灵活应用。
结构图的组成和绘制结构图的等效变换→求系统传递函数一结构图的组成和绘制系统的结构图是表示系统各元件特性、系统结构和信号流向的图示方法。
定义:将方块图中各时间域中的变量用其拉氏变换代替,各方框中元件的名称换成各元件的传递函数,这时方框图就变成了动态结构图,简称结构图,即传递函数的几何表达形式。
组成(1)信号线:带有箭头的直线,箭头表示信号的流向,在直线旁边标有信号的时间函数或象函数。
一条信号线上的信号处处相同。
X(s)(2)引出点:表示信号引出或测量的位置,同一位置引出的信号大小和性质完全相同。
(3)比较点(综合点、相加点):表示对两个以上的信号进行加减运算,加号常省略,减号必须标出。
G(s)X(s)Y(s)(4)方框:表示对信号进行的数学变换,方框内的函数为元件或系统的传递函数。
结构图的绘制R C i (a )i u ou 一阶RC 网络例1画出RC 电路的结构图。
解:利用复阻抗的概念及元件特性可得每一元件的输入量和输出量之间的关系如下:()()()(1)i o U s U s I s R -=()()(2)o I s U s sC =R :C :绘制每一元件的结构图,并把相同变量连接起来,得到系统的结构图。
1/sC U i (s)U o (s)-U o (s)I (s)1/R RC i (a )i u ou 1/sc例2:绘制两级RC 网络的结构图。
r U cU 11sC 21sC 1R 2R 1I 2I 1U111112112222()()()1()[()()]()()()1()()r C C U s U s I s R U s I s I s sC U s U s I s R U s I s sC -⎧=⎪⎪⎪=-⋅⎪⎪⎨-⎪=⎪⎪⎪=⋅⎪⎩r U cU 11sC 21sC 1R 2R 1I 2I 1U 解:利用复阻抗的概念及元件特性可得每一元件的输入量和输出量之间的关系如下:111112112222()()()1()[()()]()()()1()()r C C U s U s I s R U s I s I s sC U s U s I s R U s I s sC -⎧=⎪⎪⎪=-⋅⎪⎪⎨-⎪=⎪⎪⎪=⋅⎪⎩1/R 11/sC 11/R 21/sC 2U C (s)U r (s)U 1(s)I 1(s)I 2(s)--U 1(s)-U C (s)绘制每一元件的结构图,并把相同变量连接起来,得到系统的结构图。
3.6-1系统框图的等效变换原则.
������ ������
1 ∓ ������ ������ ∙ ������(������)
������ ������ = ������ ������ ∙ ������(������) = ������(������)[������(s) ± ������(s)] = ������ ������ [������(s) ± ������ ������ ∙ ������(������)] = ������(������) ∙ ������(s) ± ������ ������ ������ ������ ∙ ������(������)
数的代数和。
������(������)
G1
(s)
������1(������) +������
������
������2 (s)
+
������(������)
������ ������
G1(s)+������2(s)
������ ������ ������ ������ = ������(������) = G1(s) + G2(s)
引出点移动规则
������(������)
①引出点前移
������(s)
������ ������
典型机电控制系统
������ ������
������(������)
������(s)
������ ������
������(������)
������ ������
������(s)
②引出点后移
������(������) ������(s)
典型机电控制系统
反馈联接变换规则
将环节的输出量反送到输入端与输入信号进行比较后作为环节的输入量,就构
结构图及其等效变换
输入变量
传递函数G(s)
输出变量
方块内要填写元件或者环节的传递函数,方块的输出变 量等于方块的输入变量与与传递函数的乘积。
2012-03-06
第三节 控制系统的结构图及其等效变换
3
2)信号线:用带有箭头的有向直线表示,箭头方向表示信号 传递的方向,在信号线旁要标注信号时间函数或者像函数。
x(t )
ug ue+ u1
-
+
功率
u u 2 放大器 a
ω Mc
负载
uf
测速发电机
比较环节:
ue(s) = ug (s) − u f (s)
− u g (s) ue (s) u f (s)
运放Ⅰ:
u1 ( s) ue (s)
=
K1,
ue (s) K1 u1(s)
2012-03-06
第三节 控制系统的结构图及其等效变换
2012-03-06
第三节 控制系统的结构图及其等效变换
11
二、结构图的等效变换:
结结构构图图的的等等效效变变换换
[定义]:在结构图上进行数学方程的运算。 [类型]:①环节的合并;
--串联 --并联 --反馈连接 ②信号分支点移动或相加点的移动。
[变换原则]:变换前、后,环节的数学关系保持不变(即前向 通道的传递函数乘积不变,回路的传递函数保持不变,或者说变 换前、后有关部分的输入量、输出量之间的关系保持不变)。
u i = R i1 + u c1
uc1 = R i2 + uo
i1
−
i2
=
C
d u c1 dt
i2
=
C
duc2 dt
U i (s) = RI1(s) + U c1(s) U c1(s) = RI2 (s) + U o (s) I1(s) − I2 (s) = CsU c1(s) I2 (s) = CsU c2 (s)
自动控制原理2.4 结构图的等效变换及简化计算
在△中,去掉与第k条前向通 道相接触的回路对应的项后
剩余的部分。
求法: 去掉第k条前向通路后所求的△ 用梅森公式求上例信号流图对应的传函。
南京工业职业技术学院机械工程学院——自动控制原理
梅森公式例1
GG44((ss))
R(s)
注:比较点和引出点之间不能换位。 3. 通过在被变换的支路上乘或除某个传函来保持等效。 4. 根据环节方框的连接方式(串联、并联和反馈)进行简化
计算。
南京工业职业技术学院机械工程学院——自动控制原理
结构图三种连接形式及其计算
串联
G1
G2
G1 G2
n
G(s) Gi (s) i 1
并联 G1 G2
反馈 G1
G5
R –
X1 G1
– G2 X2 –
G3 X3
G4
C
X3
G6
G7
南京工业职业技术学院机械工程学院——自动控制原理
G8 G5
R – G1 X1
X2 – G2
–
X3
G3
G4
C
X3 G6
G7
(2)求传函。用梅逊公式:
1 G1G2G3G4G7 G1G2G3G4G8 G2G3G6 G3G4G5
R(s)
-
G4
A
G1
-
B
G2
H1
G3 H2
C C(s)
P1 G1G2G3 1 1
P2 G1G4 2 1
C(S) P(S) P11 P22
P11 P22
R(S)
1 (L1 L2 L3 L4 L5 )
控制系统的结构图及其等效变换

Y (s)
前移 R1(s) G(s) Y (s)
注:
R2 (s)
R1 ( s )
Y (s)
G(s)
1/G(s) R2 (s)
相加点进入和出去的信号量纲必须相同,否则不能加减。
b引出点(信号由某一点分开)
分支点分出信号,数值相同
R(s) 后移
G(s)
Y (s)
R(s)
R(s) G(s)
Y (s) R(s)
4.比较点(求和点、综合点) 1.用符号“ ”及相应的信号箭头表示 2.箭头前方的“+”或“-”表示加上此信号 或减去此信号
! 注意量纲:相同量纲的物理量
例:二阶RC电气网络
结构图的等效变换和简化
➢系统的结构图通过等效变换和简化后可以方便、快速 地求取闭环系统的传递函数或系统输出量的响应。
➢等效变换和简化的过程对应于消去中间变量求系统传
信号流图的绘制 1. 根据微分方程绘制信号流图 2. 根据方框图绘制信号流图
1. 根据微分方程绘制信号流图
i
A
取Ui(s)、I1(s)、UA(s)、I2(s)、 Uo (s)作为信号流图的节点 Ui(s)、Uo(s)分别为输入及输出节点
2. 根据方框图绘制信号流图
方块图转换为信号流 图
信号流图的等效变换法则
•支路增益——支路传输定量地表明变量从支路一端沿箭头方 向传送到另一端的函数关系。用标在支路旁边的传递函数 “G”表示支路传输。
2.
通路
沿支路箭头方向穿过各相 连支路的路径。
前向通路 从源节点到阱节点的通路上通过任何节点 不多于一次的通路。前向通路上各支路增益之 乘积,称前向通路总增益,一般用pk表示。
信号流图梅森公式
控制结构图变换

(二)用梅逊(S.J.Mason)公式求传递函数 借助于梅逊公式,不经任何构造变换,便能够得到系统旳传递函数。
梅逊公式旳体现式为:G(s)为待求旳总传递函数。
(2.85)
式中Δ——称为特征式, n——从输入节点到输出节点全部前向通路旳条数;
且 (2.86)
第四节
控制系统构造图与信号流图
提要:
一 、控制系统旳构造图 二、控制系统旳信号流图 三、控制系统旳传递函数
引言:
求系统旳传递函数时,需要对微分方程组或经拉氏变换后旳代数方程组进行消元。而采用构造图或信号流图,更便于求取系统旳传递函数,还能直观地表白输入信号以及各中间变量在系统中旳传递过程。所以,构造图和信号流图作为一种数学模型,在控制理论中得到了广泛旳应用。
(2.84)
(4)综合点与引出点旳移动 a. 综合点前移 图2-43表达了综合点前移旳等效变换。 挪动前旳构造图中,信号关系为:
(a) 原始构造图 (b) 等效构造图图2-43 综合点前移旳变换
挪动后,信号关系为:
图2-30 例2.3网络图 图2-31 例2.3网络旳构造图
解:ur为网络输入,uc为网络输出。 一种系统旳构造图不是唯一旳,但经过变换求得旳总传递函数都应该是相同旳。上例所示网络旳构造图还可用图2-32表达。
图2-32 例2.3网络构造图旳另一种形式
四个回路中,只有Ⅱ、Ⅲ回路互不接触,没有重叠旳部分。
而
故可得特征式:
图2-52(b)中只有一条前向通路,故P1=G1G2G3G4G5G6因为全部回路均与前向通路相接触,故余子式D1=1。
图2-52(b)系统旳总传递函数为:
例2.6 求图2-53所示系统旳传递函数。
一 、控制系统旳构造图