3D航模特技基本动作(图文介绍)
模拟飞行基础教程(飞机仪表盘)

(1)姿态仪。
该仪表用于反映飞机的姿态变化(如俯仰角度及倾斜角度)。
在姿态仪中蓝色代表天,深色代表地面,中间的白线代表地平线。
当飞机上仰时,姿态仪中的小飞机(橘红色)向上移动,当小飞机处于人工地平线上方时,代表飞机的仰角为正,蓝色部分的小黑线表示俯仰角度,依次为5度、10度……当飞机向左倾斜时,小飞机会相对人工地平线左倾相同角度,姿态仪最上方的橘红色三角形指示位置即为倾斜角度(最中央白线为0度,向外依次表示5度、10度、15度、30度)。
(2)速度表。
该表显示的是指示空速,指示空速是由吹入动压空的气流压强和静压孔测得静态空气压强的差值得出的,当飞机处于标准海平面气压中指示空速就等于真空速。
指示空速的单位是节。
此外讲解以下几个速度的不同:1)指示空速(如上)2)真空速:飞机相对周围气体的速度,粗略数据可由指示空速换算得来。
3)地速:飞机相对地面的速度,可由真空速加上风速得出。
4)马赫数:真空速与相应条件下音速的比值。
再来了解下速度表上各速度的标示:1)最外圈白色范围表示进行襟翼操纵的速度范围,其中注意襟翼操纵范围的最小值也就是飞机在着陆形态下的最小可操纵速度Vso。
2)绿色部分表示在不放襟翼(或称光洁形态)时的操纵范围,其最小值就是飞机在光洁形态下的最小操纵速度Vs。
3)黄色部分表示超过正常巡航/操纵范围的速度,其与绿色部分大交点也就是正常巡航最大速度,称为Vno4)最后的红色部分表示飞机结构设计的极限速度Vne,在所有飞行中都不应超过该速度。
最后发现忘了说一点,速度表的单位是节!(3)高度表。
飞机上主要用的是气压高度表,该高度表通过测量飞机所在高度的气压与海平面气压的差值得出高度。
需要注意的是在飞行中需要依情况转换高度表修正值(海平面气压状态),例如当机场处修正海平面气压为29.83英寸汞柱时,就需转动高度表左下方的旋钮时表盘右侧的气压值窗口的示数达到29.83。
在转换高度之上(美国是18000英尺,中国一般是9800英尺,若由于实际情况变化会予以通告)高度表应拨为标准海平面气压29.92英寸汞柱。
3D飞行技巧讲解
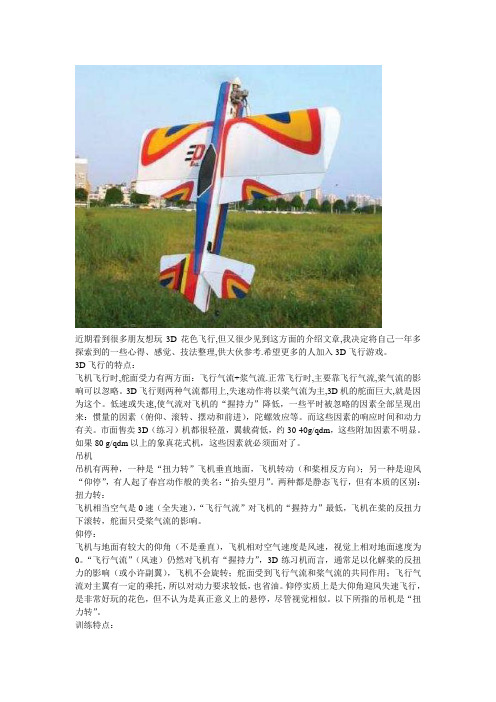
近期看到很多朋友想玩3D花色飞行,但又很少见到这方面的介绍文章,我决定将自己一年多探索到的一些心得、感觉、技法整理,供大伙参考.希望更多的人加入3D飞行游戏。
3D飞行的特点:飞机飞行时,舵面受力有两方面:飞行气流+浆气流.正常飞行时,主要靠飞行气流,桨气流的影响可以忽略。
3D飞行则两种气流都用上,失速动作将以桨气流为主,3D机的舵面巨大,就是因为这个。
低速或失速,使气流对飞机的“握持力”降低,一些平时被忽略的因素全部呈现出来:惯量的因素(俯仰、滚转、摆动和前进),陀螺效应等。
而这些因素的响应时间和动力有关。
市面售卖3D(练习)机都很轻盈,翼载荷低,约30-40g/qdm,这些附加因素不明显。
如果80 g/qdm以上的象真花式机,这些因素就必须面对了。
吊机吊机有两种,一种是“扭力转”飞机垂直地面,飞机转动(和桨相反方向);另一种是迎风“仰停”,有人起了春宫动作般的美名:“抬头望月”。
两种都是静态飞行,但有本质的区别:扭力转:飞机相当空气是0速(全失速),“飞行气流”对飞机的“握持力”最低,飞机在桨的反扭力下滚转,舵面只受桨气流的影响。
仰停:飞机与地面有较大的仰角(不是垂直),飞机相对空气速度是风速,视觉上相对地面速度为0。
“飞行气流”(风速)仍然对飞机有“握持力”,3D练习机而言,通常足以化解桨的反扭力的影响(或小许副翼),飞机不会旋转;舵面受到飞行气流和桨气流的共同作用;飞行气流对主翼有一定的乘托,所以对动力要求较低,也省油。
仰停实质上是大仰角迎风失速飞行,是非常好玩的花色,但不认为是真正意义上的悬停,尽管视觉相似。
以下所指的吊机是“扭力转”。
训练特点:深圳是模型飞机和发动机的主要产地,便利条件下玩吊机稍早(约一年半前)。
至今,见过极高天分,用我的飞机,第3箱油就能离地1米吊机、也见过在我后面不久玩“仰停”,都一年多了,到现在还听说不会“扭力转”的。
天份是一方面,方法也很重要。
吊机训练和其他飞行训练一样,要快速反应,必须在大脑形成条件反射区。
航模第一视角操作方法
航模第一视角操作方法
航模的第一视角操作方法包括以下几个步骤:
1. 首先,确保你的航模装备已经连接并且工作正常。
这可能包括安装和连接摄像头、无线视频传输设备和头戴显示器。
2. 将你的航模起飞到适当的高度,确保光线和视线良好,并且没有明显的障碍物。
3. 戴上头戴显示器,将视频信号传输到你的眼睛中。
确保头戴显示器的安全稳固地固定在你的头部,以免在操作期间晃动或掉落。
4. 通过遥控器或无线遥控信号将航模切换到第一视角模式。
这通常包括通过遥控器上的按钮或切换开关完成。
5. 当你戴上头戴显示器后,你的视野将会完全由航模的摄像头提供。
通过操纵遥控器上的摇杆或按钮,你可以控制航模的飞行方向和速度。
6. 在操作期间,要尽量保持稳定的姿势和视野。
如果你感到晕眩或失去平衡,请立即停止操作并稍作休息。
7. 当你完成第一视角飞行后,要及时切换回正常的飞行模式,以便可以通过直
接视线进行操作和控制。
请注意,在操作航模的第一视角模式时,要遵循相关的安全规定和指导,并确保在允许的区域内飞行。
及时关注电池电量和航模的飞行状态,以避免发生意外或损坏。
模拟飞行教程
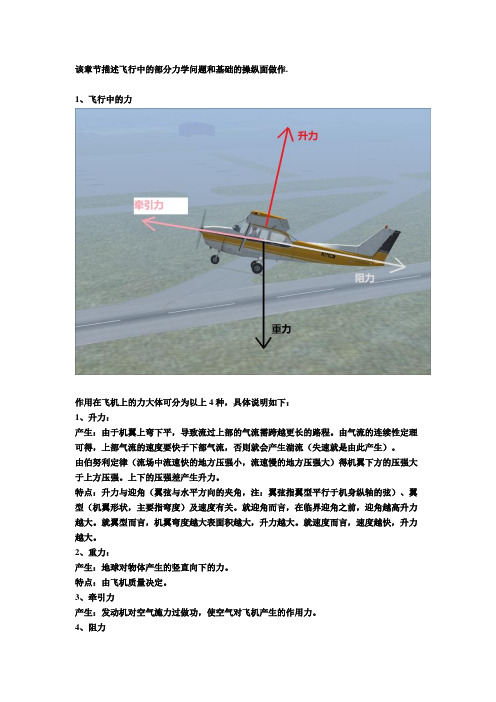
该章节描述飞行中的部分力学问题和基础的操纵面做作.1、飞行中的力作用在飞机上的力大体可分为以上4种,具体说明如下:1、升力:产生:由于机翼上弯下平,导致流过上部的气流需跨越更长的路程。
由气流的连续性定理可得,上部气流的速度要快于下部气流,否则就会产生湍流(失速就是由此产生)。
由伯努利定律(流场中流速快的地方压强小,流速慢的地方压强大)得机翼下方的压强大于上方压强。
上下的压强差产生升力。
特点:升力与迎角(翼弦与水平方向的夹角,注:翼弦指翼型平行于机身纵轴的弦)、翼型(机翼形状,主要指弯度)及速度有关。
就迎角而言,在临界迎角之前,迎角越高升力越大。
就翼型而言,机翼弯度越大表面积越大,升力越大。
就速度而言,速度越快,升力越大。
2、重力:产生:地球对物体产生的竖直向下的力。
特点:由飞机质量决定。
3、牵引力产生:发动机对空气施力过做功,使空气对飞机产生的作用力。
4、阻力产生:阻力有压差阻力、摩擦阻力、诱导阻力、干扰阻力和激波阻力。
这里先介绍前三种。
压差阻力:由迎风面和背风面压强差所产生的阻力(类似推一个被塞住针孔的注射器)。
摩擦阻力:就是一般所说的滑动摩擦力。
诱导阻力:由于空气对机翼产生了升力,所以机翼对空气有一个反作用力,这个力的作用使气流偏转。
偏转后的气流会进一步使升力的角度不再垂直于翼弦,而是向后偏一个相同的角度,升力在翼弦方向的分力就是诱导阻力。
升力越大,诱导阻力也越大。
干扰阻力:各零件间气流发生干扰产生的阻力(以机翼和机身间的干扰阻力最大)。
2、飞机的旋转轴3、飞机的基本操纵面该图介绍了4种操纵面:1、升降舵:可上下偏转,使飞机绕Y轴做俯仰运动(模拟飞行中由方向键上下控制)。
2、副翼:左右联动,左副翼向下偏,右侧则向上偏,反之亦然。
可让飞机绕X轴做滚转运动(模拟飞行中由方向键左右控制)。
3、方向舵:可左右偏转,使飞机绕Z轴运动(模拟飞行中用摇杆的Z轴控制,键盘使用小键区的ENTER和0键)。
4、俯仰运动(1)升降舵的运动。
航模教程(初级)

航模初级入门资料目录一、基础知识 0A.机身与器件 0B.工具、耗材 0C.飞行及控制原理 (1)二、飞行教程 (2)A.飞行流程 (2)B.方向控制操作 (2)三、Su-27技术参数 (2)四、主要元件 (3)五、注意事项 (19)一、基础知识A.机身与器件(1)机身材料:KT板(2)器件:1.遥控:①.遥控器②.接收机2.动力: ①.电子调节器(简称“电调”)②.无刷电机+电机座③.航模专用动力电池(锂电池)④.桨与桨夹3.方向:①.舵机②.舵角+快速调节器③.拉杆B.工具、耗材1.工具:①钳子②螺丝刀③热熔胶枪+胶棒④美工刀⑤尺子2.耗材:①纤维胶带②魔术贴③魔术扎带C.飞行及控制原理1.飞机向前飞行:桨高速旋转向后推动气流,使飞机向前飞行2.方向控制:例如飞机向上飞行时两个尾舵都向上翘,气流通过尾舵时把飞机尾部下压,机身上仰,飞机向上飞。
其他方向的控制类似。
3. 制作及调试流程初级:购买器件——组装(机身、电子器件,最后装电池)——调试(重心位置、舵面偏角微调)——试飞中级:设计图纸—打印图纸贴在KT板上--切割--组装(机身、电子器件,最后装电池)——调试(重心位置、舵面偏角微调)——试飞高级:除了学会设计机身,组装机身和调试飞行外,我们还应该学会一些电路和单片机编程的知识,能够维修电子器件,设计和制作遥控设备及飞控(飞行控制器)等。
二、飞行教程A.飞行流程起飞前检查--起飞--微调--正常飞行--降落--检查是否受损B.方向控制操作1)尾舵全向上,机身上仰,飞机拉起2)尾舵全向下,机身下俯,飞机俯冲3)尾舵左上右下,机身左翻转4)尾舵左下右上,机身右翻转5) 1和3组合,混空模式下尾舵会左上右中立,飞机左转弯。
依次类推三、Su-27技术参数A.材料:KT板/PP板B.尺寸:机长110cm ,翼展70 cmC.控制距离: 1公里左右D.续航时间:10分钟左右E.充电时间:一小时左右F.飞行距离:1公里左右G.飞行高度:300米左右H.颜色:不固定,可定制I.附加功能:夜航,投弹,发导弹,拉彩带,拉烟,航拍等四、主要元件遥控器无线电遥控器的主要功能是将我们的手部操作转换成操作指令,通过无线电波将操作指令传给接收机。
直升机航线和3D飞行教程

直升机训练进阶图学习直升机飞行之前看看这张图吧,很直观也很详细。
直升机航线飞行直升机的动作目前有两种流行趋势,一种为惊险刺激的3D飞行,其飞行中绝大部分进行令人眼花缭乱的真直升机完全做不到的倒、退飞中夹杂横滚、斤斗、死亡螺旋等动作,使直升机始终在临界负荷状态下飞行,精神高度紧张,稍有疏忽,摔机后损失惨重,所以适合3D飞行的飞机都力求简单、易维修、便宜。
另外一种是多年延续下来的3C飞行,它受正规严谨的训练,力求动作准确优雅,充分展示直升机不同于其它形式飞机的飞行特点,对飞机器材等要求较高,有国际航联规定的多套动作可作训练、比赛。
其缺点为练习时需多人互相促进,动作练习时未免枯燥乏味。
它的比赛动作分为静动作和高空动作,高空动作又以上空飞行的航线练习为基础之基础,下面就为大家讲一下航线的练习方法。
上空飞行之前要有扎实的左右侧悬停基础,可先进行侧悬停平视高度左右平移并逐渐加快平移速度的练习,这种练习主要是练习控制飞机速度的能力,此种练习要达到既可将飞机加速飞行,也可以以准确的杆量将快速飞行的飞机机速控制住,还能减速将飞机停下来。
初次上空飞行可采取图一的形式,(顺便讲明,直升机在慢速前进时,因直升机机体本身与风相对运动也产生一些升力,所以直升机只比悬停时稍加一点油门,就可以升空慢速跑航线了)逐渐加大距离。
返回的路线为原路退回。
在逐渐熟悉飞机在高空姿态观察以后可以按图二的航线飞行。
在爬升转弯以后可以稍加速。
图三解释的是顺时针单旋翼直升机在加速飞行时,因旋翼每旋转一周分顶风、顺风面,会产生一个升力差,速度越大越明显会机体往右倾斜,需压左副翼修正,同样,机体本身有自律安定性,克服反扭力矩的右尾桨舵也显偏大,机头要修左来纠正(现在多数的陀螺带锁头功能,也就很不明显了)。
图一图二图三好了,现在我们可以上天了。
图四所画的是直升机标准的转弯航线。
开始的时候逐渐压右副翼、右尾桨稍微拉一点升降舵使飞机刚刚能转过弯即可,图中列举了两种过度打尾桨和尾桨舵量不够的情况,需要注意的是开始的时候以慢机速前进,转弯时副翼、尾桨舵量要小,使飞机以缓坡度大半径转弯。
8个特技飞行中的典型动作你知道其中的作战优势吗?

8个特技飞行中的典型动作你知道其中的作战优势吗?近期在珠海举办的航展飞行表演一定让小伙伴们大开眼界,每次看特技飞行表演的时候,相信许多朋友对于特殊的飞行动作,总是遭遇许多不解。
俄罗斯人绘制的一组说明图,还算直观形象,帮助了解常见的几个特技飞行表演动作。
下次,我们不仅可以看热闹,也可以看看门道了。
1、钟形机动所谓的钟形机动,就是在进行尾冲机动时,当战机在垂直爬高的顶点,垂直速度为零后,通过调整机体姿态,使战机以尾喷口为旋转轴心,在水平方向上进行快速的机头转向。
从地面看去,这时机头转向时犹如钟表的指针一般,围绕机尾旋转,所以被形象地称之为钟形机动。
这一动作首次出现是在1988年的范堡罗航展上,当时苏联试飞员克沃丘尔驾驶米格-29OVT首次公开展示了这一机动动作。
2、桶滚这个动作是飞机沿着自身的水平轴线作360度滚转,其时真正的桶滚是走螺旋线的。
1905年,当时美国人丹尼尔·马洛尼首次完成了这个动作。
在第二次世界大战中,这一特技动作挽救过无数飞行员的生命,因为在作桶滚时由于杆舵配合的不同,可以让飞机以螺旋线方式完成滚转,使得尾追的敌机难以预测飞行轨迹和瞄准。
其实真正的桶滚应该是就酱紫滴。
3、殷麦曼这是以一战德国王牌飞行员殷麦曼的名字命名的一个特技飞行动作,也有人把它称作战斗转弯,再形象一点,也有人称其为上升半滚倒转。
1915年,德国飞行员马克斯·殷麦曼(Max Immelman)率先在福克E.III上完成了这个动作。
进入殷麦曼时,飞行员首先开大油门加速,然后拉动升降舵使飞机进入斤斗,并根据需要转的方向适时拉动副翼改变航向。
当飞机进入斤斗顶时,飞机正好处于平飞状态。
现代喷气战斗机在此时可以争取到大约1500-2000米的高度。
4、平螺旋这是个对飞机和飞行员水准要求都很高的动作。
从飞行轨迹上看,飞机以很陡的轨迹呈小半径螺旋下落姿态,很像在空中旋转飘落的树叶。
这个动作出现的时间大约是在20世纪初,当时螺旋是致命飞行事故的主要原因。
航空模型基础知识教程(四).doc
航空模型基础知识教程(四)本文由hly822贡献doc文档可能在WAP端浏览体验不佳。
建议您优先选择TXT,或下载源文件到本机查看。
第四节手掷直线距离科目一,三种飞行方式本科目是在限定宽度条件下比赛往返手掷飞行距离•决定成绩的因素有三个:&,投掷技术;b,模型模型的滑翔性能;6模型模型的直线飞行性能•飞行方式有模型模型以下三种:1,自然滑翔直线飞行:出手速度和模型模型的滑翔速度相同,出手后模型模型沿滑模型模型翔轨迹直线滑翔,飞行距离取决丁出手高度和滑翔比,一般在6 一10米之间.2,水平前冲直线飞行:出手速度稍大于模型模型的滑翔速度,出手后模型模型先水模型模型平直线前冲一段距离后过渡到自然滑翔•这种方式比自然滑翔距离可能提高2 - 5米.3,爬升前冲直线飞行:以更大的速度出手并且可以有小的出手角•出手后模型沿小角度直线爬升,然后转入滑翔•这种方式可能比自然滑翔距离提高5模型一10米以上.第一种方式成绩较低,但容易掌握,成功率高•后两种方式飞行距离远,但放飞, 调整技术难度大,成功率较低•因为@)方向偏差和飞行距离成正比,增大飞行距离后模型模型飞出边线机率增加(飞出边线后成绩无效);(b)前冲特别是爬模型升前冲容易使模型模型失速下冲或改变航向飞出边线•因此,为了取得好的成绩,就模型需要了解更多的飞行调整知识,提高体能,熟练地应用投掷技巧.二,模型模型的调整模型1,滑翔性能•滑翔性能是飞出较大直线距离的基础•调整时应注意两个问题.一个是最大限度的减小阻力,模型模型表面耍保持光滑,零部件采用流线形(也括配模型重),前后缘打磨为圆形,翼面平整不耍扭曲等,减小阻力可以增大升阻比,即可以增大滑翔比. 第二点是调整到有利迎角•迎角由升降调整片来控制•不同迎角模型模型的升阻模型比不同,有利迎角升阻比最大,同一高度的滑翔距离最远•正常滑翔后,还需微调升降调整片,找到一个最佳舵位.2, 模型模型的配重•许多人有一种印象,似乎模型模型越重越飞不远. 其实不然.模型模型模型的滑翔比和重量无关•另一方面,重量小模型模型的动能就小,克服阻力的能力模型模型就小,手掷距离反而小•轻飘飘的稻草扔不远也是这个道理•所以,手掷直线距离项目的模型模型,在规则允许的范围内,应适当增大重量,以加大模型模型的动能.模型模型3,机翼的刚性•手掷模型模型的初速较大,机翼承受弯曲力矩大,容易变形甚模型至颤振而影响飞行性能•为此,制作时要小心操作,不让翼面出现折痕•如刚性仍不足,就要适当加强•方法是在翼根和机身接合处抹胶水,也可在翼根部单面域双面贴加强务(如胶带纸).4,直线飞行的调整a,理想的直线飞行是模型模型既没有方向不平衡力矩乂没有横侧不平衡力矩,模型即垂直尾翼没有偏角(方向调整片中立位置),左右机翼完全对称(没有副翼作用)•这种情况不但阻力最小,而且能适应速度的变化.b,实际上模型模型一般总是转弯的,原因不外乎机翼不对称(多数情况是机翼扭模型曲),产生了滚传力矩,或是垂直尾翼有偏角产生了方向力矩. 遇到这种情况最好查明原因〃对症下药〃,以达到接近理想的直线飞行•我们把这种调整方法叫做〃直接调整法〃.c,还有一种调整方法,例如由于机翼扭曲产牛向左滚转的力矩,模型模型向左模型倾斜,升力向左的分力使模型模型左转弯•这种情况不直接纠正机翼的扭曲,而是给模型一点右舵,也可以使模型模型直飞•这种调整方法叫〃间接调整法〃•间接调整虽然模型也能实现宜线飞行,但这种玄线飞行是有缺陷的:一是增大了阻力,降低了滑翔性能;二是难于适应速度的变化,不少模型模型前一段基本上能保持直线,后一•段转模型弯偏航,其原因多半是间接调整造成的.因此,应尽量釆用〃直接调整法〃,避免〃间接调整法〃.5,克服前冲失速的方法前面提到前冲和前冲爬升可以大幅度提高飞行成绩,但同时乂存在失速下冲和失速转向的危险•因此克服前冲失速是提高成绩的关键.克服前冲失速的措施是提高俯仰安定性•具体做法是适当配重前移重心,同时相应加大机翼,水平尾翼的安装角差,以保持俯仰平衡•这样当模型模型前冲抬头模型机翼逐渐接近失速吋,水平尾翼因按装角小尚未失速,水平尾翼仍有足够的低头力矩使模型模型转入滑翔•模型克服前冲失速的另一个办法是用较小的迎角飞行•事实证明,迎角越大越容易失速下冲,迎角越小越不容易进入失速下冲.失速转弯是机翼扭曲造成的,机翼扭曲时,必有一侧安装角交大(另一侧变小),接近失速时这一半机翼先失速,并使模型模型倾斜转弯•前面提到的间接调整模型的缺陷尤其表现在这种情况,所以机翼的扭曲必须彻底纠正.三,投掷技巧模型调好之后,决定飞行成绩完全取决于投掷技巧了•好的技巧能充分发挥模型模型的飞行性能,甚至可以弥补模型模型的某些缺陷•所以,并不是一投了事,要反模型模型复练习掌握要领:1,助跑,投掷的动作要协调,使模型模型保持平稳,忌抖动和划圆弧.模型2,恰当的出手速度•出手速度不是|古|定不变的,不同的调整状况,不同的飞行方式,不同的风速风向要求有不同的出手速度•争取做到随心所欲,准确无误.3,恰当的出手角度•一般自然滑翔方式出手应有一个很小的负角;水平前冲方式的出手角一般为零度(水平);爬升前冲方应有一个适当的正角(仰角).4,出手点和出手方向:如果模型模型是完全直线飞行的,在无风情况下,运动模型员应在起飞线的屮点向正前方出手,这样成功率最高•但事实上转弯的模型模型占绝模型大多数,侧风放飞的情况也占大多数•聪明的运动员善于利用出手点和出手方向的变化来修正由于侧风和模型模型转变引起的偏差.例如右转弯模型模型如果在起飞线正模型模型中放飞就可能从右方飞出边线,如果乂碰上左侧风,情况就更严重•假如换一个方法——出手点选在起飞线左侧,出手方向有意识左偏•这样前半段模型模型可能在模型空中飞出左边线,而后半段可能绕回来在场内着陆,使成绩有效.5,风与投掷吋机:风对飞行的影响有不利的…面,另外也有有利的方面.例如顺风能增大飞行距离;逆风则减小飞行距离,侧风有吋加剧偏航,有吋乂减小偏航•风一般是阵性的,风速和风向在不断变化•要善于捕捉最佳出手吋机.例如顺风吋最好大风瞬间出手,逆风时在弱风瞬间出手.。
F3A新动作详解(上)
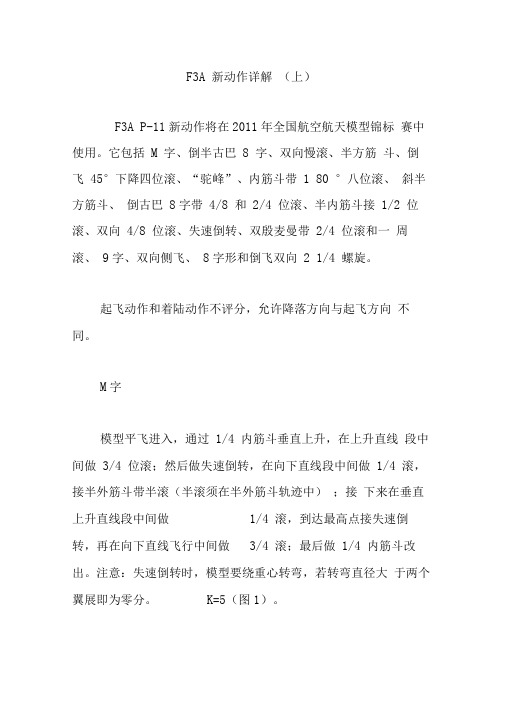
F3A 新动作详解(上)F3A P-11新动作将在2011年全国航空航天模型锦标赛中使用。
它包括M 字、倒半古巴8 字、双向慢滚、半方筋斗、倒飞45°下降四位滚、“驼峰”、内筋斗带1 80 °八位滚、斜半方筋斗、倒古巴8字带4/8 和2/4 位滚、半内筋斗接1/2 位滚、双向4/8 位滚、失速倒转、双殷麦曼带2/4 位滚和一周滚、9字、双向侧飞、8字形和倒飞双向2 1/4 螺旋。
起飞动作和着陆动作不评分,允许降落方向与起飞方向不同。
M字模型平飞进入,通过1/4 内筋斗垂直上升,在上升直线段中间做3/4 位滚;然后做失速倒转,在向下直线段中间做1/4 滚,接半外筋斗带半滚(半滚须在半外筋斗轨迹中);接下来在垂直上升直线段中间做1/4 滚,到达最高点接失速倒转,再在向下直线飞行中间做3/4 滚;最后做1/4 内筋斗改出。
注意:失速倒转时,模型要绕重心转弯,若转弯直径大于两个翼展即为零分。
K=5(图1)。
倒半古巴8 字模型平飞进入后以45°角上升,在上升直线段中间做2/4 位滚,接5/8 内筋斗平飞改出,所有筋斗的半径须相同。
K=3 (图2)。
双向慢滚模型水平直线飞行进入,一周慢滚后紧接一周反向慢滚。
注意:两慢滚的速率须相同,滚间停顿时间要短。
K=(4 图3)。
半方筋斗模型在上升直线中间快滚一周,水平倒飞改出。
注意:所有筋斗的半径须相同,快滚方向不限,但若为桶状或副翼滚则扣分大于5分。
K=3 (图4)。
倒飞45°下降四位滚模型水平倒飞进入,以45°角直线下降,在下降直线中间完成四位滚,倒飞改出。
K=3 (图5)。
“驼峰”模型倒飞进入,做1/4 外筋斗,然后在垂直上升直线中间做1/2 滚后接1/2 外筋斗,接着在垂直下降直线中间作2/4 位滚,最后做1/4 内筋斗正飞改出,所有筋斗的半径相同。
K=3 (图6)内筋斗带180°八位滚模型平飞进入内筋斗,并在其上半部180°弧线内完成一周八位滚。
航海模型遥控操作方法

航海模型遥控操作方法
航海模型遥控操作一般包括以下步骤:
1. 准备工作:确认航海模型的遥控器已经安装好电池并处于正常工作状态。
检查航海模型本身的电池是否已经完全充电。
2. 开启遥控器和航海模型的电源:打开遥控器的电源开关,然后打开航海模型的电源开关。
等待一段时间,直到遥控器能够成功连接到航海模型的无线信号。
3. 对航海模型进行校准:在确认航海模型已经成功连接到遥控器之后,按下航行校准按钮,使航海模型的操纵设备自动归位。
4. 舵机调整:根据实际情况,调整舵机的位置,以确保航海模型能够正确响应遥控器上的操作指令。
5. 操纵航海模型:使用遥控器上的操纵杆或按钮来控制航海模型的前进、后退、转向等动作。
不同遥控器的操作方式可能略有不同,具体请参考所使用遥控器的说明书进行操作。
6. 其他功能控制:一些航海模型可能还配备了其他功能,如灯光、声响等,可以根据需要使用遥控器上相应的按钮来控制这些功能。
7. 结束操作:当完成航海模型的操作后,可以先关闭航海模型本身的电源开关,然后再关闭遥控器的电源开关。
需要注意的是,在进行航海模型遥控操作时,要确保操作区域的安全性,避免与其他物体相撞或造成伤害。
同时,需要遵守相关的航海规则和法律法规,以确保航海模型的安全运行。
模拟飞行演示教学

二 模拟器软件安装
-9-
以RealFlight7.0为例,模拟器软件的安装方法如下:
1、打开光盘根目录下setup.exe文件(有些情况光盘会自动运行),出现下图:
2、点击Run setup.exe按钮,出现(图1);点击Advanced按钮之后会出现下 拉窗口,可以选择安装路径,之后点击Install按钮,开始安装(图2);看到 (图3)就代表安装完成。
2、接下来运行桌面上的控制台,运行RealFlight G7.0,出 现下面的软件界面选择FLY按钮。
3、现在设置遥控器,选择Simulation菜单里的Select Controller。
4、接下来弹出菜单选择InterLink Elite
5、再选择弹出对话框里的通道校准 Calibrate。会出现下图,这时摇杆最 大范围来回打方框几次。最后都放在 中位。让最上面的4个通道都在中间。
2017年9月14日
中国民航飞行员训练的实践与探索
23
多旋翼模拟器(直升机适用)
2、顺/逆时针停转90o矩形航线: 顺时针、逆时针飞行各一圈,高度 1m基本保持不变,沿白线飞行, 速度均匀(1-2m/s)。下图以逆时 针为例:
2017年9月14日
中国民航飞行员训练的实践与探索
24
多旋翼模拟器(直升机适用)
右杆向左,右边副翼向下偏转,左边副翼向上偏转,飞机以机身 为轴心向左倾斜(副翼杆要回中),反之向右倾斜
日本手:日本手的油门和副翼在右边,方向和升降在右边;
右手操纵杆(以下就称为右杆)向上是油门加大,飞机速度加快 (油门杆是不回中的),反之减小,速度减慢;
右杆向左,右边副翼向下偏转,左边副翼向上偏转,飞机以机身 为轴心向左倾斜(副翼杆要回中),反之向右倾斜
3D遥控特技技术图解
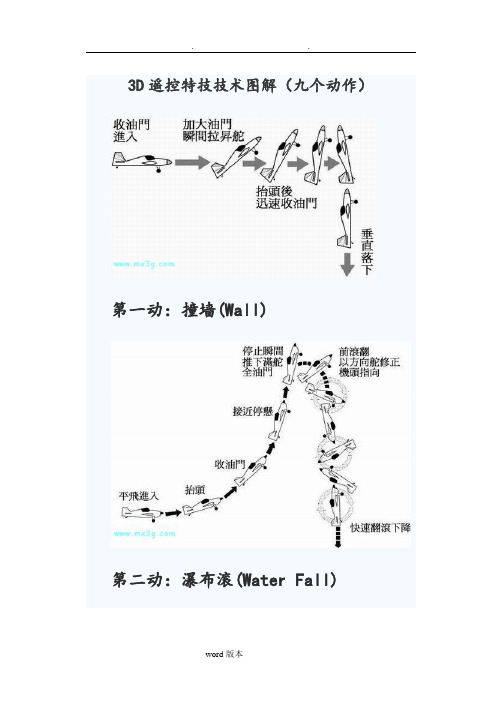
3D遥控特技技术图解(九个动作)第一动:撞墙(Wall)第二动:瀑布滚(Water Fall)第三动:扭力滚(Torque Roll)第四动:侧滚水平筋斗(Rolling Loop)第五动:降落伞(Parachute)第六动:隆许瓦克(Lomcevak)第七动:侧飞筋斗(Knife-wdge loop)第八动:猎鹰(Harrier)遥控飞机术语解析迎角(Angle of attack) 对于固定翼飞机,机翼的前进方向(相当与气流的方向)和翼弦(与机身轴线不同)的夹角叫迎角,也称为攻角,它是确定机翼在气流中姿态的基准。
对于直升机和旋翼机,迎角的表示方法与固定翼飞机略有不同,它是指与前进方向垂直的轴和旋翼的控制轴之间的夹角。
侧滑角(side slip angle)是指飞机的轴线与飞机的飞行速度方向在水平面内的夹角。
侧滑角是确定飞机飞行姿态的重要参数。
过载(overload)作用在飞机上的气动力和发动机推力的合力与飞机重力之比称为飞机的过载。
飞机所能承受过载的大小是衡量飞机机动性的重要参数。
过载越大,飞机的受力越大,为保证飞机的安全,飞机的过载不能过大。
飞行员在机动飞行中也会因为过载大于一或者小于一而承受超重和失重。
飞行员所能承受的最大过载一般不能超过8。
边条(Strake) 边条是指附加于机身或机翼机身结合处的小翼面,包括机身边条和机翼边条两种。
机身边条位于机身左右两侧,宽度相等;而机翼边条则是位于机翼机身结合处近似三角形的小翼面。
采用边条翼结构可以减少阻力,改善飞机的操作性。
上反角(Dihedral angle) 上反角是指机翼基准面和水平面的夹角,当机翼有扭转时,则是指扭转轴和水平面的夹角。
当上反角为负时,就变成了下反角(Cathedral angle)。
三角翼(Delta wing) 指平面形状呈三角形的机翼。
三角翼的特点是后掠角大,结构简单,展弦比小,适合于超音速飞行。
马赫数(Mach number) 常写作M数,它是高速流的一个相似参数。
航模教程(初级)

航模初级入门资料目录一、基础知识 0A.机身与器件 0B.工具、耗材 0C.飞行及控制原理 (1)二、飞行教程 (2)A.飞行流程 (2)B.方向控制操作 (2)三、Su-27技术参数 (2)四、主要元件 (3)五、注意事项 (19)一、基础知识A.机身与器件(1)机身材料:KT板(2)器件:1.遥控:①.遥控器②.接收机2.动力: ①.电子调节器(简称“电调”)②.无刷电机+电机座③.航模专用动力电池(锂电池)④.桨与桨夹3.方向:①.舵机②.舵角+快速调节器③.拉杆B.工具、耗材1.工具:①钳子②螺丝刀③热熔胶枪+胶棒④美工刀⑤尺子2.耗材:①纤维胶带②魔术贴③魔术扎带C.飞行及控制原理1.飞机向前飞行:桨高速旋转向后推动气流,使飞机向前飞行2.方向控制:例如飞机向上飞行时两个尾舵都向上翘,气流通过尾舵时把飞机尾部下压,机身上仰,飞机向上飞。
其他方向的控制类似。
3. 制作及调试流程初级:购买器件——组装(机身、电子器件,最后装电池)——调试(重心位置、舵面偏角微调)——试飞中级:设计图纸—打印图纸贴在KT板上--切割--组装(机身、电子器件,最后装电池)——调试(重心位置、舵面偏角微调)——试飞高级:除了学会设计机身,组装机身和调试飞行外,我们还应该学会一些电路和单片机编程的知识,能够维修电子器件,设计和制作遥控设备及飞控(飞行控制器)等。
二、飞行教程A.飞行流程起飞前检查--起飞--微调--正常飞行--降落--检查是否受损B.方向控制操作1)尾舵全向上,机身上仰,飞机拉起2)尾舵全向下,机身下俯,飞机俯冲3)尾舵左上右下,机身左翻转4)尾舵左下右上,机身右翻转5) 1和3组合,混空模式下尾舵会左上右中立,飞机左转弯。
依次类推三、Su-27技术参数A.材料:KT板/PP板B.尺寸:机长 110cm ,翼展 70 cmC.控制距离: 1公里左右D.续航时间: 10分钟左右E.充电时间:一小时左右F.飞行距离: 1公里左右G.飞行高度: 300米左右H.颜色:不固定,可定制I.附加功能:夜航,投弹,发导弹,拉彩带,拉烟,航拍等四、主要元件遥控器无线电遥控器的主要功能是将我们的手部操作转换成操作指令,通过无线电波将操作指令传给接收机。