电机控制器的说明书
DKC一Y240智能步进伺候电机控控制器使用说明书
DKC一Y240智能步进伺候电机控控制器使用说明书DKC一Y240智能步进伺候电机控控制器是 DKC公司生产的一款智能步进电机控制器,具有体积小、重量轻、控制灵活、方便维护和节能等特点。
其主要参数如下:地址:本控制器主要由1个电机控制盒、1个步进驱动控制器;功能:支持步数设置,最多可设置3组步数;状态:定时、断电保护状态;通讯接口:网口连接。
产品特点:采用直流调速的控制方式,具有速度快、响应及时,无电流积点保护、低电压无干扰等特点;适合于小型的智能步进电机。
1.控制器应符合以下条件:a)控制器应具有过载保护、欠电流保护、过载报警等功能;b)控制器应具有定时功能、断电保护功能;c)控制器应能够根据使用需要调整参数;d)控制器应具有与控制器参数直接相关的软件功能(如通信接口、网口等);e)控制器应具有远程操作功能;f)控制盒中应有良好的温度和湿度条件。
e)控制器中应有良好的通风设备。
2.控制盒连接电源必须接在低电压无干扰的地方。
并保证外部电源正常。
如遇到外部电源异常断电,应先断开所有电源线,待异常恢复后再重新接上。
外部电源不允许接入控制盒及其它外部设备。
如有接线要求,请使用专用接线盒进行接线。
禁止用任何电线与其它设备连接及焊接。
注意:(1)不要接电源线上所有带金属外壳接电源。
(2)不要将电压过高或过低。
(3)不要在现场使用过低或过高的电源和开关设备。
(4)应保持现场清洁(如有污垢应及时用清洁)在使用过高或过低电源和开关设备时要采取措施使输出电压不超过额定电压的90%甚至更高,并尽量保持在一个范围内(见图1-1)。
3.所有步进电机应在无任何信号的情况下正常运行,并能在控制盒内直接进行控制。
a.若驱动电流大于等于额定电流,则在启动电机时应先接通电源,待电源正常后再启动电机。
b.若不能正常启动电动机,则应先将控制盒的各档位合上再启动。
c.当系统检测到需要运行过程出现异常时,要及时断开各电源。
d.如果是低速运行,则在启动到定速运转期间要先接通主电源,待其完全断开后再启动电机。
JD1A-40电磁调速电机控制器说明书

JD1A-40电磁调速电机控制器产品使用说明书江苏省泰州市耐特调速电机有限公司JDIA-40型电磁调速电动机控制器是原机械工业部全国联合统一设计产品,用于电磁调速电动机(滑差电机)的调速控制。
实现恒转矩无级调速,当负载为风机和泵类时,节电效果显著,可达10%~30%,是我国目前推广的节能产品之一。
1、型号含义:2、使用条件:2.1、海拔不超过1000m 。
2.2、周围环境温度;-5℃-+40℃。
2.3、相对湿度不超过90%(20℃以下时)。
2.4、振动频率10-15OHz 时,其最大振动加速度应不超过0.5g 。
2.5、电网电压幅位波动±10%额定值时、保证额定使用。
2.6、周围介质没有导电尘埃和能腐蚀金属和破坏绝缘的气体。
3、主要技术数据:3.1调速范围:电源为50Hz 时:1250~125转/分60Hz 时:1500~150转/分3.2转速变化率(机械特性硬度)≤2.5%100%100%%10X 额定最高速度负载下是转速—负载下的转速转速变化率=3.3稳速精度:≤1%3.4最大输出:直流90V3.5控制电机功率:0.55~40KW3.6测速发动机三相2V ≤3.5V/100r .p.m 。
4.基本工作原理:JD1A—40电磁调速电动机控制装置是由速度调节器、移相触发器、可控硅整流电路及速度负反馈等环节所组成。
图1为装置原理方框图。
图2为装置的电气原理图。
图3为装置的移相触发各点波形图。
从图1-图4可知,二种线路的工作原理都是相同的。
速度指令信号电压和调速负反馈信号电压比较后,其差值信号被送入速度调节器(或前置放大器)进行放大,放大后的信号电压与锯齿波叠加,控制了晶体管的导通时刻,产生了随着差值信号电压改变而移动的脉冲,从而控制了可控硅的开放角,使滑差离合器的激磁电流得到了控制,即滑差离合器的转速随着激磁电流的改变而改变。
由于速度负反馈的作用,使电磁调速电动机实现恒转矩无极调速。
从图2-图3可知,JD1A—40型的速度指令信号电压是由装在控制箱面板上的速度操作电位器产生的。
步进电机控制器说明书

步进电机控制器说明书本文档旨在提供步进电机控制器的详细说明,包括其功能、使用方法和技术参数等内容。
以下是各章节的具体细化:1. 引言1.1 背景介绍1.2 目的与范围2. 控制器概述2.1 功能特点- 步进电机驱动能力强大,适用于多种应用场景。
- 支持多种通信接口(如RS485、CAN)以及常见编程语言(如C++、Python)。
- 提供丰富而灵活的运动控制模式。
3. 硬件配置要求3.1最低硬件需求CPU:Intel Core i5或更高版本;内存:8GB RAM 或以上;存储空间:100GB 可用磁盘空间;3.2推荐硬件配置CPU: Intel Core i7-9700K;内存:16 GB DDR4;显卡:NVIDIA GeForce RTX2060 Super;4.安装指南4-1安装前准备工作a) 操作系统选择:Windows操作系统推荐Windows10, Linux操作系統建议Ubuntu18+.b) 软件:访问官方网站最新版本的步进电机控制器软件。
4-2安装过程a) 运行安装程序,按照提示完成安装;b) 配置相关参数以适应实际需求。
5. 使用方法5.1 控制器连接与通信设置- 描述如何将控制器与计算机或其他设备进行连接,并配置相应的通信接口和参数。
5.2 步进电机驱动设置- 解释如何使用控制器来驱动步进电机,并提供示例代码和操作指南。
5.3 运动控制模式选择及调整-介绍不同运动模式(位置、速度等)的特点和用法,并说明如何根据需要进行调整。
6.技术规格6-1输入/输出端口提供输入/输出引脚定义表;描述各个引脚功能及其对应编号。
6—2总线协议支持列出所支持总线协议名称;指明每种总线协议在本系统中具体作用。
7.故障排除7_1常见问题解答常见问题并给予解决方案;8.附件:请参考附件文件。
法律名词及注释:1. 步进电机:一种将脉冲信号转换为角位移的执行器,通常由定子和转子组成。
2. 控制器:用于控制步进电机运动的设备或系统。
TI无刷DC电机控制器UC1625-SP说明书

UC1625-SP ZHCS012A–SEPTEMBER2011–REVISED SEPTEMBER2011耐辐射V类,无刷DC电机控制查询样品:UC1625-SP特性•装有理想二极管的高速电流感应放大器•逐脉冲和平均电流感应•经QML-V标准认证,SMD5962-91689•过压及欠压保护•耐辐射:40kRad(Si)TID(1)•用于安全方向反转的方向闩•直接驱动功率场效应管(MOSFET)或者达灵顿功率管(Darlington)•转速计•50-V开路集电极高层驱动器•修整参考源30mA•锁存软启动•可编程交叉传导保护(1)辐射容限是基于初始器件鉴定(放射量率=10mrad/sec)的•两象限和四象限运算典型值。
可提供辐射批量接受测试——详情请与厂家联系。
说明/订购信息UC1625电机控制器在一个封装内集成了高性能无刷dc电机控制所需的大多数功能。
当与外部功率场效应管(MOSFET)或者达灵顿功率管(Darlington)耦合的时候,此器件在电压或者电流模式下件执行固定频率PWM 电机控制的同时执行闭环速度控制和具有智能噪音抑制功能的刹车,安全方向反转,和交叉传导保护。
虽然额定工作电压范围是10V至18V,UC1625可借助于外部电平位移组件来控制具有更高电源电压的器件。
UC1625含有用于低侧功率器件的快速、高电流推挽驱动器和用于高侧功率器件或者电平位移电路的50V开路集电极输出。
UC1625额定军用工作温度范围是-55°C至125°C。
ORDERING INFORMATION(1)ORDERABLE PARTT A PACKAGE(2)TOP-SIDE MARKINGNUMBER5962-9168902VYA–55°C to125°C CDIP–JT5962-9168902VYAUC1625-SP(1)For the most current package and ordering information,see the Package Option Addendum at the endof this document,or see the TI website at .(2)Package drawings,thermal data,and symbolization are available at /packaging.Please be aware that an important notice concerning availability,standard warranty,and use in critical applications of TexasInstruments semiconductor products and disclaimers thereto appears at the end of this data sheet.UC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011Typical ApplicationABSOLUTE MAXIMUM RATINGS (1)(2)over operating free-air temperature range (unless otherwise noted)VALUEUNITVCC 20Supply voltage PWR VCC20PWM IN–0.3to 6E/A IN(+),E/A IN(–)–0.3to 12V ISENSE1,ISENSE2–1.3to 6OV-COAST,DIR,SPEED-IN,SSTART,QUAD SEL –0.3to 8H1,H2,H3–0.3to 12PU Output Voltage–0.3to 50PU +200continuous PD ±200continuousE/A ±10Output currentmA I SENSE –10TACH OUT ±10VREF –50continuousT J Maximum Junction Temperature 150°C (1)Currents are positive into and negative out of the specified terminal.(2)Stresses above these ratings may cause permanent damage.Exposure to absolute maximum conditions for extended periods may degrade device reliability.These are stress ratings only and functional operation of the device at these or any other conditions beyond those specified is not implied.PWR VCCRC-OSC PWM IN E/A OUT VCC SSTART OV-COAST QUAD SEL E/A IN(-)ISENSE VREF H3SPEED-INH2ISENSE1ISENSE2DIR E/A IN(+)H1PDC PUB RC-BRAKE TACH-OUT PUA PDB PDAGNDPUCUC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011RECOMMENDED OPERATING CONDITIONSover operating temperature range (unless otherwise noted)MINNOMMAX UNIT V CC Supply Voltage 1018V PU Output Current+85mA continuous PD ±85mA continuousT AOperating temperature range-55125°CTable 1.THERMAL RATINGS TABLER θJA (°C/W)R θJC (°C/W)PACKAGE (Junction-to-ambient thermal resistance)(Junction-to-case thermal resistance)DIL-28(JT)43.14.95Figure 1.CONNECTION DIAGRAMUC1625-SPZHCS012A–SEPTEMBER2011–REVISED ELECTRICAL CHARACTERISTICSUnless otherwise stated,these specifications apply over the full temperature range,typical values at T A=25°C;Pwr V CC=V CC=12V;R OSC=20kΩto V REF;C OSC=2nF;R TACH=33kΩ;C TACH=10nF;and all outputs unloaded.T A=T J.PARAMETER TEST CONDITIONS MIN TYP MAX UNIT OverallSupply current14.530.0mAVCC turn-on threshold-55°C to125°C8.658.959.55V VCC turn-off threshold7.758.058.55 Overvoltage/CoastOV-COAST inhibit threshold 1.65 1.75 1.85OV-COAST restart threshold 1.535 1.65 1.75V-55°C to125°COV-COAST hysteresis0.050.100.155OV-COAST input current–10–110μA Logic InputsH1,H2,H3low threshold0.8 1.0 1.25-55°C to125°C V H1,H2,H3high threshold 1.6 1.9 2.0H1,H2,H3input current-55°C to125°C,to0V–400–250–120μAQUAD SEL,dir thresholds0.8 1.4 3.0VQUAD SEL hysteresis70130mVDIR hysteresis-55°C to125°C0.40.60.9VQUAD SEL input current–3050150μA DIR input current–30–130PWM Amp/ComparatorE/A IN(+),E/A IN(–)input current To2.5V–5.0–0.1 5.0μA PWM IN input current To2.5V0330Error amp input offset0V<V COMMON-MODE<3V–1010mVError amp voltage gain7090dBE/A OUT range25°C to125°C0.25 3.50V-55°C0.25 4.2 Pullup current To0V,25°C-16–10–5μATo0V,-55°C to125°C–17.5-5S STARTDischarge current To2.5V0.10.4 3.0mARestart threshold0.10.20.3V Current AmpGain I SENSE1=0.3V,I SENSE2=0.5V to0.7V 1.75 1.95 2.15V/VLevel shift I SENSE1=0.3V,I SENSE2=0.3V 2.4 2.5 2.65Peak current threshold0.140.200.26VI SENSE1=0V,force I SENSE2Over current threshold0.260.300.36I SENSE1,I SENSE2input current–850–3200To0VμAI SENSE1,I SENSE2offset current-12±212Range I SENSE1,I SENSE2–12V Tachometer/BrakeTACH-OUT high level 4.75 5.3-55°C to125°C,10kΩto2.5V V TACH-OUT low level0.2On time170220280μsOn time change with temp-55°C to125°C0.1%RC-BRAKE input current To0V–4.0–1.9mAUC1625-SP ZHCS012A–SEPTEMBER2011–REVISED SEPTEMBER2011ELECTRICAL CHARACTERISTICS(continued)Unless otherwise stated,these specifications apply over the full temperature range,typical values at T A=25°C;Pwr V CC=V CC=12V;R OSC=20kΩto V REF;C OSC=2nF;R TACH=33kΩ;C TACH=10nF;and all outputs unloaded.T A=T J.PARAMETER TEST CONDITIONS MIN TYP MAX UNIT Threshold to brake,RC-brake0.8 1.0 1.2V Brake hysteresis,RC-brake0.090.4-55°C to125°CSPEED-IN threshold220257290mVSPEED-IN input current–30–530μA Low-Side Drivers(1)Voh,–1mA,down from V CC 1.60 2.50Voh,–50mA,down from V CC 1.75 2.45-55°C to125°C V Vol,1mA0.050.4Vol,50mA0.360.9Rise/fall time10%to90%slew time,into1nF50500ns High-Side DriversVol,1mA0.10.4-55°C to125°C V Vol,50mA 1.0 1.8Leakage current Output voltage=50V30μAFall time10%to90%slew time,50mA load50ns OscillatorFrequency-55°C to125°C3080kHz ReferenceIref=0mA,25°C 4.85 5.0 5.15 Output voltage V-55°C to125°C 4.7 5.0 5.3 Load regulation0mA to–20mA load–40–5mV Line regulation10V to18V V CC–10–110Short circuit current-55°C to125°C20100150mA MiscellaneousOutput turn-on delay1μs Output turn-off delay1(1)Current available from these pins can peak as high as0.5A.QUAD SELRC-OSCPW M IN E/A OUT E/A IN(+) E/A IN(–)SSTARTISENSE ISENSE1 ISENSE2VCC OV-COASTDIR SPEED-INH1H2H3 RC-BRAKE PUAPUBPUCPDAPDBPDC GND TACH-OUT PW R VCC VREFUC1625-SPZHCS012A–SEPTEMBER2011–REVISED Block DiagramUC1625-SP ZHCS012A–SEPTEMBER2011–REVISED SEPTEMBER2011DEVICE INFORMATIONTerminal FunctionsTERMINALDESCRIPTIONNAME NO.The position decoder logic translates the Hall signals and the DIR signal to the correct driversignals(PUs and PDs).To prevent output stage damage,the signal on DIR is first loadedinto a direction latch,then shifted through a two-bit register.As long as SPEED-IN is less than250mV,the direction latch is transparent.WhenSPEED-IN is higher than250mV,the direction latch inhibits all changes indirection.SPEED-IN can be connected to TACH-OUT through a filter,so that the direction latch is onlytransparent when the motor is spinning slowly,and has too little stored energy to damagepower devices.Additional circuitry detects when the input and output of the direction latch are different,or DIR,SPEED-IN6,7when the input and output of the shift register are different,and inhibits all output drivesduring that time.This can be used to allow the motor to coast to a safe speed beforereversing.The shift register ensures that direction can not be changed instantaneously.The register isclocked by the PWM oscillator,so the delay between direction changes is always going to bebetween one and two oscillator periods.At40kHz,this corresponds to a delay of between25μs and50μs.Regardless of output stage,25μs deadtime should be adequate to ensureno overlap cross-conduction.Toggling DIR causes an output pulse on TACH-OUTregardless of motor speed.E/A IN(+)and E/A IN(–)are not internally committed to allow for a wide variety of uses.Theycan be connected to the ISENSE,to TACH-OUT through a filter,to an external commandvoltage,to a D/A converter for computer control,or to another op amp for more elegantfeedback loops.The error amplifier is compensated for unity gain stability,so E/A OUT canbe tied to E/A IN(–)for feedback and major loop compensation.E/A IN(+),E/A IN(–),E/A1,28,27,26E/A OUT and PWM In drive the PWM comparator.For voltage-mode PWM systems,PWM In OUT,PWM INcan be connected to RC-OSC.The PWM comparator clears the PWM latch,commandingthe outputs to chop.The error amplifier can be biased off by connecting E/A IN(–)to a higher voltage than/EAIN(+).When biased off,E/A OUT appears to the application as a resistor to ground.E/A OUTcan then be driven by an external amplifier.GND15All thresholds and outputs are referred to the GND pin except for the PD and PU outputs.The three shaft position sensor inputs consist of hysteresis comparators with input pullupresistors.Logic thresholds meet TTL specifications and can be driven by5-V CMOS,12-VCMOS,NMOS,or open-collectors.Connect these inputs to motor shaft position sensors that are positioned120electricaldegrees apart.If noisy signals are expected,zener clamp and filter these inputs with6-VH1,H2,H38,9,10zeners and an RC filter.Suggested filtering components are1kΩand2nF.Edge skew inthe filter is not a problem,because sensors normally generate modified gray code with onlyone output changing at a time,but rise and fall times must be shorter than20μs for correcttachometer operation.Motors with60electrical degree position sensor coding can be used ifone or two of the position sensor signals is inverted.The current sense amplifier has a fixed gain of approximately two.It also has a built-in levelshift of approximately2.5V.The signal appearing on ISENSE is:I SENSE=2.5V+(2×ABS(I SENSE1–I SENSE2))I SENSE1and I SENSE2are interchangeable and can be used as differential inputs.Thedifferential signal applied can be as high as±0.5V before saturation.If spikes are expected on ISENSE1or ISENSE2,they are best filtered by a capacitor fromISENSE to ground.Filtering this way allows fast signal inversions to be correctly processed ISENSE1,ISENSE2,by the absolute value circuit.The peak-current comparator allows the PWM to enter a3,4,5ISENSE current-limit mode with current in the windings never exceeding approximately0.2V/R SENSE.The overcurrent comparator provides a fail-safe shutdown in the unlikely case ofcurrent exceeding0.3V/R SENSE.Then,softstart is commanded,and all outputs are turnedoff until the high current condition is removed.It is often essential to use some filter drivingISENSE1and ISENSE2to reject extreme spikes and to control slew rate.Reasonablestarting values for filter components might be250-Ωseries resistors and a5-nF capacitorbetween ISENSE1and ISENSE2.Input resistors should be kept small and matched tomaintain gain accuracy.This input can be used as an over-voltage shut-down input,as a coast input,or both.ThisOV-COAST23input can be driven by TTL,5-V CMOS,or12-V CMOS.UC1625-SPZHCS012A–SEPTEMBER2011–REVISED Terminal Functions(continued)TERMINALDESCRIPTIONNAME NO.These outputs can drive the gates of N-channel power MOSFETs directly or they can drivethe bases of power Darlingtons if some form of current limiting is used.They are meant todrive low-side power devices in high-current output stages.Current available from these pins PDA,PDB,PDC12,13,14can peak as high as0.5A.These outputs feature a true totem-pole output stage.Beware ofexceeding device power dissipation limits when using these outputs for high continuouscurrents.These outputs pull high to turn a“low-side”device on(active high).These outputs are open-collector,high-voltage drivers that are meant to drive high-sidepower devices in high-current output stages.These are active low outputs,meaning thatthese outputs pull low to command a high-side device on.These outputs can drivePUA,PUB,PUC16,17,18low-voltage PNP Darlingtons and P-channel MOSFETs directly,and can drive anyhigh-voltage device using external charge pump techniques,transformer signal coupling,cascode level-shift transistors,or opto-isolated drive(high-speed opto devices arerecommended).(See applications).This supply pin carries the current sourced by the PD outputs.When connecting PD outputsdirectly to the bases of power Darlingtons,the PWR VCC pin can be current limited with a PWR VCC11resistor.Darlington outputs can also be"Baker Clamped"with diodes from collectors back toPWR VCC.(See Applications)The device can chop power devices in either of two modes,referred to as“two-quadrant”(Quad Sellow)and“four quadrant”(Quad Sel high).When two-quadrant chopping,thepulldown power devices are chopped by the output of the PWM latch while the pullup driversremain on.The load chops into one commutation diode,and except for back-EMF,willexhibit slow discharge current and faster charge current.Two-quadrant chopping can be QUAD SEL22more efficient than four-quadrant.When four-quadrant chopping,all power drivers are chopped by the PWM latch,causing theload current to flow into two diodes during chopping.This mode exhibits better control of loadcurrent when current is low,and is preferred in servo systems for equal control overacceleration and deceleration.The QUAD SEL input has no effect on operation duringbraking.Each time the TACH-OUT pulses,the capacitor tied to RC-BRAKE discharges fromapproximately3.33V down to1.67V through a resistor.The tachometer pulse width isapproximately T=0.67R T C T,where R T and C T are a resistor and capacitor fromRC-BRAKE to ground.Recommended values for R T are10kΩto500kΩ,andrecommended values for C T are1nF to100nF,allowing times between5μs and10ms.Best accuracy and stability are achieved with values in the centers of those ranges.RC-BRAKE also has another function.If RC-BRAKE pin is pulled below the brake threshold, RC-BRAKE21the device enters brake mode.This mode consists of turning off all three high-side devices,enabling all three low-side devices,and disabling the tachometer.The only things that inhibitlow-side device operation in braking are low-supply,exceeding peak current,OV-COASTcommand,and the PWM comparator signal.The last of these means that if current sense isimplemented such that the signal in the current sense amplifier is proportional to brakingcurrent,the low-side devices will brake the motor with current control.(See applications)Simpler current sense connections results in uncontrolled braking and potential damage tothe power devices.The UC1625can regulate motor current using fixed-frequency pulse width modulation(PWM).The RC-OSC pin sets oscillator frequency by means of timing resistor R OSC from theRC-OSC pin to VREF and capacitor COSC from RC-OSC to Gnd.Resistors10kΩto100kΩand capacitors1nF to100nF works the best,but frequency should always be below500kHz.Oscillator frequency is approximately:F=2/(R OSC x C OSC)RC-OSC25Additional components can be added to this device to cause it to operate as a fixed off-timePWM rather than a fixed frequency PWM,using the RC-OSC pin to select the monostabletime constant.The voltage on the RC-OSC pin is normally a ramp of about1.2V peak-to-peak,centered atapproximately1.6V.This ramp can be used for voltage-mode PWM control,or can be usedfor slope compensation in current-mode control.O n T i m eC T –m F1 m 10 m 100 m100 Hz1 kHz 10 kHz100 kHz 1 MHzO s c i l l a t o r F r e q u e n c yC OSC (m F)UC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011Terminal Functions (continued)TERMINAL DESCRIPTIONNAMENO.Any time that VCC drops below threshold or the sensed current exceeds the over-current threshold,the soft-start latch is set.When set,it turns on a transistor that pulls down on SSTART.Normally,a capacitor is connected to this pin,and the transistor will completely discharge the capacitor.A comparator senses when the NPN transistor has completely discharged the capacitor,and allows the soft-start latch to clear when the fault is removed.When the fault is removed,the soft-start capacitor charges from the on-chip current source.SSTART clamps the output of the error amplifier,not allowing the error amplifier output SSTART 24voltage to exceed SSTART regardless of input.The ramp on RC-OSC can be applied to PWM In and compared to E/A OUT.With SSTART discharged below 0.2V and the ramp minimum being approximately 1.0V,the PWM comparator keeps the PWM latch cleared and the outputs off.As SSTART rises,the PWM comparator begins to duty-cycle modulate the PWM latch until the error amplifier inputs overcome the clamp.This provides for a safe and orderly motor start-up from an off or fault condition.A 51-k Ωresister is added between VREF and SSTART to ensure switching.Any change in the H1,H2,or H3inputs loads data from these inputs into the position sensor latches.At the same time data is loaded,a fixed-width 5-V pulse is triggered on TACH-OUT.The average value of the voltage on TACH-OUT is directly proportional to speed,so this output can be used as a true tachometer for speed feedback with an external filter or TACH-OUT 20averaging circuit which usually consists of a resistor and capacitor.Whenever TACH-OUT is high,the position latches are inhibited,such that during the noisiest part of the commutation cycle,additional commutations are not possible.Although this effectively sets a maximum rotational speed,the maximum speed can be set above the highest expected speed,preventing false commutation and chatter.This device operates with supplies between 10V and 18V.Under-voltage lockout keeps all outputs off below 7.5V,insuring that the output transistors never turn on until full drive VCC 19capability is available.Bypass VCC to ground with an 0.1-μF ceramic ing a 10-μF electrolytic bypass capacitor as well can be beneficial in applications with high supply impedance.This pin provides regulated 5V for driving Hall-effect devices and speed control circuitry.VREF reaches 5V before VCC enables,ensuring that Hall-effect devices powered from VREF 2VREF becomes active before the UC1625drives any output.For proper performance VREF should be bypassed with at least a 0.1-μF capacitor to ground.TYPICAL CHARACTERISTICSOscillator FrequencyTachometer on Timevsvs C OSC and R OSCRT and CTFigure 2.Figure 3.-75Temperature –5C -50-250755025125100S u p p l y C u r r e n t – m A02468101214161820-75Temperature –5C-50-250755025125100S o f t S t a r t C u r r e n t – m A-15-14-13-12-11-10-9-8-7-6-5-75Temperature –5C-50-25755025125100S o f t S t a r t C u r r e n t – m A0.25.50.751.001.25I SENSE2 – I SENSE1 – VI S E N S E – V0.50.0-0.52.533.5UC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011TYPICAL CHARACTERISTICS (continued)Supply CurrentSoft-Start Pullup CurrentvsvsTemperatureTemperatureFigure 4.Figure 5.Soft-Start Discharge CurrentCurrent Sense Amplifier Transfer FunctionvsvsTemperatureI SENSE2–I SENSE1Figure 6.Figure 7.PUAPDAPULL DOWNPULL UP FROMUC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011APPLICATION INFORMATIONCross Conduction PreventionThe UC1625inserts delays to prevent cross conduction due to overlapping drive signals.However,some thought must always be given to cross conduction in output stage design because no amount of dead time can prevent fast slewing signals from coupling drive to a power device through a parasitic capacitance.The UC1625contains input latches that serve as noise blanking filters.These latches remain transparent through any phase of a motor rotation and latch immediately after an input transition is detected.They remain latched for two cycles of the PWM oscillator.At a PWM oscillator speed of 20kHz,this corresponds to 50μs to 100μs of blank time which limits maximum rotational speed to 100kRPM for a motor with six transitions per rotation or 50kRPM for a motor with 12transitions per rotation.This prevents noise generated in the first 50μs of a transition from propagating to the output transistors and causing cross-conduction or chatter.The UC1625also contains six flip flops corresponding to the six output drive signals.One of these flip flops is set every time that an output drive signal is turned on,and cleared two PWM oscillator cycles after that drive signal is turned off.The output of each flip flop is used to inhibit drive to the opposing output (Figure 8).In this way,it is impossible to turn on driver PUA and PDA at the same time.It is also impossible for one of these drivers to turn on without the other driver having been off for at least two PWM oscillator clocks.Figure 8.Cross Conduction PreventionUC1625-SPZHCS012A–SEPTEMBER2011–REVISED Power Stage DesignThe UC1625is useful in a wide variety of applications,including high-power in robotics and machinery.The power output stages used in such equipment can take a number of forms,according to the intended performance and purpose of the system.Figure9show four different power stages with the advantages and disadvantages of each.For high-frequency chopping,fast recovery circulating diodes are essential.Six are required to clamp the windings.These diodes should have a continuous current rating at least equal to the operating motor current, since diode conduction duty-cycle can be high.For low-voltage systems,Schottky diodes are preferred.In higher voltage systems,diodes such as Microsemi UHVP high voltage platinum rectifiers are recommended.In a pulse-by-pulse current control arrangement,current sensing is done by resistor R S,through which the transistor's currents are passed(Fig.A,B,and C).In these cases,R D is not needed.The low-side circulating diodes go to ground and the current sense terminals of the UC1625(I SENSE1and I SENSE2)are connected to R S through a differential RC filter.The input bias current of the current sense amplifier causes a common mode offset voltage to appear at both inputs,so for best accuracy,keep the filter resistors below2kΩand matched. The current that flows through R S is discontinuous because of chopping.It flows during the on time of the power stage and is zero during the off time.Consequently,the voltage across R S consists of a series of pulses, occurring at the PWM frequency,with a peak value indicative of the peak motor current.To sense average motor current instead of peak current,add another current sense resistor(R D in Fig.D)to measure current in the low-side circulating diodes,and operate in four quadrant mode(pin22high).The negative voltage across R D is corrected by the absolute value current sense amplifier.Within the limitations imposed by Table2,the circuit of Fig.B can also sense average current.TOMOTORFIGURE ATOMOTORFIGURE BTOMOTORFIGURE CTOMOTORFIGURE DUC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011Figure 9.Four Power Stage Designs Table 2.Imposed Limitations for Figure 9CURRENT SENSESAFE 2QUADRANT4QUADRANTPOWER REVERSEBRAKINGPulse-by-PulseAverage Figure A Yes No No N0Yes No Figure B Yes Yes No In 4-quad mode only Yes Yes Figure C Yes Yes Yes In 4-quad mode only Yes No Figure DYesYesYesIn 4-quad mode onlyYesYesUC1625-SPZHCS012A –SEPTEMBER 2011–REVISED SEPTEMBER 2011For drives where speed is critical,P-channel MOSFETs can be driven by emitter followers as shown in Figure 10.Here,both the level shift NPN and the PNP must withstand high voltages.A zener diode is used to limit gate-source voltage on the MOSFET.A series gate resistor is not necessary,but always advisable to control overshoot and ringing.High-voltage optocouplers can quickly drive high-voltage MOSFETs if a boost supply of at least 10V greater than the motor supply is provided (See Figure 11)To protect the MOSFET,the boost supply should not be higher than 18V above the motor supply.For under 200-V 2-quadrant applications,a power NPN driven by a small P-Channel MOSFET performs well as a high-side driver as in Figure 12.A high voltage small-signal NPN is used as a level shift and a high voltage low-current MOSFET provides drive.Although the NPN does not saturate if used within its limitations,the base-emitter resistor on the NPN is still the speed-limiting component.Figure 13shows a power NPN Darlington drive technique using a clamp to prevent deep saturation.By limiting saturation of the power device,excessive base drive is minimized and turn-off time is kept fairly ck of base series resistance also adds to the speed of this approach.Figure 10.Fast High-Side P-Channel DriverFigure 11.Optocoupled N-Channel High-SideDriverUC1625-SP ZHCS012A–SEPTEMBER2011–REVISED SEPTEMBER2011Figure12.Power NPN High-Side Driver Figure13.Power NPN Low-Side DriverUC1625-SPZHCS012A–SEPTEMBER2011–REVISED Fast High-Side N-Channel Driver with Transformer IsolationA small pulse transformer can provide excellent isolation between the UC1625and a high-voltage N-Channel MOSFET while also coupling gate drive power.In this circuit(shown in Figure14),a UC3724is used as a transformer driver/encoder that duty-cycle modulates the transformer with a150-kHz pulse train.The UC3725 rectifies this pulse train for gate drive power,demodulates the signal,and drives the gate with over2-A peak current.Figure14.Fast High-Side N-Channel Driver with Transformer IsolationBoth the UC3724and the UC3725can operate up to500kHz if the pulse transformer is selected appropriately. To raise the operating frequency,either lower the timing resistor of the UC3724(1kΩmin),lower the timing capacitor of the UC3724(500pF min)or both.If there is significant capacitance between transformer primary and secondary,together with very high output slew rate,then it may be necessary to add clamp diodes from the transformer primary to12V and ground. General purpose small signal switching diodes such as1N4148are normally adequate.The UC3725also has provisions for MOSFET current limiting.See the UC3725data sheet for more information on implementing this.UC1625-SP ZHCS012A–SEPTEMBER2011–REVISED SEPTEMBER2011Computational Truth TableTable3shows the outputs of the gate drive and open collector outputs for given hall input codes and direction signals.Numbers at the top of the columns are pin numbers.These devices operate with position sensor encoding that has either one or two signals high at a time,never all low or all high.This coding is sometimes referred to as"120°Coding"because the coding is the same as coding with position sensors spaced120magnetic degrees about the rotor.In response to these position sense signals, only one low-side driver turns on(go high)and one high-side driver turns on(pull low)at any time.putational Truth TableINPUTS OUTPUTSDIR H1H2H3Low-Side High-Side68910121314161718 1001L H L L H H 1011L L H L H H 1010L L H H L H 1110H L L H L H 1100H L L H H L 1101L H L H H L 0101L L H H L H 0100L L H L H H 0110L H L L H H 0010L H L H H L 0011H L L H H L 0001H L L H L H X111L L L H H H X000L L L H H H。
jda-40电磁调速电机控制器说明书
JD1A-40电磁调速电机控制器产品使用说明书江苏省泰州市耐特调速电机有限公司JDIA-40型电磁调速电动机控制器是原机械工业部全国联合统一设计产品,用于电磁调速电动机(滑差电机)的调速控制。
实现恒转矩无级调速,当负载为风机和泵类时,节电效果显著,可达10%~30%,是我国目前推广的节能产品之一。
1、型号含义:2、使用条件:2.1、海拔不超过1000m 。
2.2、周围环境温度;-5℃-+40℃。
2.3、相对湿度不超过90%(20℃以下时)。
2.4、振动频率10-15OHz 时,其最大振动加速度应不超过0.5g 。
2.5、电网电压幅位波动±10%额定值时、保证额定使用。
2.6、周围介质没有导电尘埃和能腐蚀金属和破坏绝缘的气体。
3、主要技术数据:3.1调速范围:电源为50Hz 时:1250~125转/分60Hz 时:1500~150转/分3.2转速变化率(机械特性硬度)≤2.5%100%100%%10X 额定最高速度负载下是转速—负载下的转速转速变化率=3.3稳速精度:≤1%3.4最大输出:直流90V3.5控制电机功率:0.55~40KW3.6测速发动机三相2V ≤3.5V/100r .p.m 。
4.基本工作原理:JD1A—40电磁调速电动机控制装置是由速度调节器、移相触发器、可控硅整流电路及速度负反馈等环节所组成。
图1为装置原理方框图。
图2为装置的电气原理图。
图3为装置的移相触发各点波形图。
从图1-图4可知,二种线路的工作原理都是相同的。
速度指令信号电压和调速负反馈信号电压比较后,其差值信号被送入速度调节器(或前置放大器)进行放大,放大后的信号电压与锯齿波叠加,控制了晶体管的导通时刻,产生了随着差值信号电压改变而移动的脉冲,从而控制了可控硅的开放角,使滑差离合器的激磁电流得到了控制,即滑差离合器的转速随着激磁电流的改变而改变。
由于速度负反馈的作用,使电磁调速电动机实现恒转矩无极调速。
从图2-图3可知,JD1A—40型的速度指令信号电压是由装在控制箱面板上的速度操作电位器产生的。
多功能电机控制器使用说明书
多功能电机控制器使用说明书目录多功能电机控制器使用说明书 (1)主要技术参数 (1)系统硬件构造 (2)伺服软件系统构造 (6)PID算法设计思路 (6)PID滤波器C语言代码 (7)系统通信局部软件设计 (9)使用快速原型系统调试系统的根本思路 (10)驱动器外壳加工问题 (11)主要技术参数1.输入电压:直流18-60V2.最大输出电流:10A3.最大峰值输出电流:20A4.限位输入形式:霍尔开关限位滑动变阻器限位5.开关量输入输出接口电平:5V TTL6.开关量输入输出接口数量:8个7.编码器输入接口种类:相位相差90度的双路方波信号8.编码器输入接口电平:兼容3.3V,5V TTL电平9.电机驱动PWM频率:1K-72K可调10.通信接口形式: CAN总线RS232总线系统硬件构造核心控制电路硬件构造USB和以太网由于空间现在本系统中功能被屏蔽。
USB接口可以实现系统的在线更新和维护。
基于实时以太网的高速控制器为伺服电机控制器开展的趋势〔西门子和法兰克的数控系统都采用这种方式〕,对于分散式控制系统,这种控制方式可以省略掉入XX控制系统中购置多串口卡的本钱;并且,由于网络变压器的隔离特性,即使下层电路在未来的设计中不采用隔离设计,整个系统对于工业控制计算机仍然是隔离的,实用此种方法可以提高系统的稳定性,降低整个系统的本钱,并实现控制系统固件库的在线远程更新。
以上两种功能可以在新的电路板设计中增加。
系统的多功能输入输出构造中预留绝对式磁栅编码器的接口单元。
启动模式根据使用说明书在系统的默认条件下,从主储存器启动,即BOOT0引脚位低,这种情况适合系统通过仿真器调试时使用。
这种启动模式也是默认值。
即在电路板中左部的BOOT0和BOOT1不连接任何短路冒。
这样设计的目的是要早工业应用场合防止使用短路冒造成系统在震开工况下不稳定的情况。
如图1.1 所示。
图1.1 从主FLASH启动的默认设置如果系统需要有在线更新功能,本主控板可以通过USART2,USB OTG FS对系统进展更新。
交流电机控制器使用说明书
交流电机控制器使用说明书 SQ-02系列威海同泰赛维电子科技有限公司地址:高技术产业开发区科技路188号电话:0631-5690236传真:0631-5695057网址:一、基本功能SQ-02型交流电机控制器是针对平面磨床工作台的横向进给电动机设计的,其基本特点如下:1、采用先进的单片机作为控制中心,精度高,调节方便;2、兼有手动连续进给和自动点动进给功能;3、“手动开关”接通时,电机连续进给,直到该开关断开为止;4、“自动开关”点动闭合(约10MS)时,延时TDELAY时间,电机自动进给TADJ时间后自动关闭.5、设有TADJ时间设定拨码开关,可按要求设置进给时间.6、控制精度高(TADJ时间控制精度达1MS)、调节方便、性能可靠、安装调试方便。
7、面板设置状态指示灯,可以准确指示工作状态,并可根据指示灯的状态排除一些简单故障.二、技术参数1、控制器电源电压:AC220V±10%2、电动机输入电压:AC 220V~380V3、最大输出电流:AC 1A4、点动动作时间TADJ:0~200MS~500MS~1000MS~1500MS5、点动延时时间TDELAY:0~500MS三、安装、调试与维修1、对交流电动机的要求1.1电气参数与控制器相匹配1.2线圈内部无匝间短路及开路现象1.3用500v兆欧表测量,电动机对地绝缘电阻应不低于1MQ2、接线及调整方法(参见外接线图,端子号码印于面板上)2.1接线方法:该控制器用于控制三相220V交流电机1#2#3#:外接47K电位器:4#5#:接手动开关:5#6#:接自动开关:7#8#:接两相AC220v输入;9#10#:接负载电机的两相(有一根交流220v相线不经控制器直接进入负载电机);11#:接线端子.注意:如果点动动作时间TADJ调节方向反,请把调节电位器的1#3#线调换.2.2外形及安装尺寸外形尺寸:162(长)×85(宽) ×83(高)安装孔距离:153×452.3动作时间TADJ设置注意:设置某一开关为ON时,其他开关必须置OFF.否则执行最小设定值。
步进电机控制器说明书
步进电机控制器说明书步进电机控制器说明书一、产品概述本文档旨在提供有关步进电机控制器的详细说明。
步进电机控制器是一种用于控制步进电机运动的装置,通过电子方式驱动步进电机实现精确的位置控制。
本控制器具有高精度、可编程性强等特点,适用于各种不同的步进电机应用场景。
二、产品特性本节介绍步进电机控制器的主要特性和功能。
2.1 高精度驱动步进电机控制器采用先进的驱动技术,能够实现高精度的步进电机驱动,可满足精密定位和运动控制需求。
2.2 可编程控制控制器内置丰富的控制算法,支持用户编程,可以根据具体应用需求进行自定义控制,提供更灵活的控制方式。
2.3 多种通信接口本控制器支持多种通信接口,如RS232、RS485、CAN等,便于与其他设备进行通信,实现系统集成和数据传输。
2.4 多种操作模式控制器提供多种操作模式选择,如速度控制、位置控制、力控制等,适应不同应用场景的需求。
2.5 安全保护功能为了确保系统的安全性,本控制器内置了多种安全保护功能,如过流保护、过热保护等,提供有效的保护措施。
三、产品安装和连接本节介绍步进电机控制器的安装和连接方式。
3.1 安装首先,确保电源已经断开。
将控制器固定在合适的位置,通过螺丝固定。
确保控制器和其他设备之间的空间足够,并保持良好的通风。
3.2 连接根据具体应用需求,通过合适的连接线将控制器与步进电机、电源等设备连接。
注意连接的正确性和稳定性,避免接触不良和短路等问题。
四、控制器编程及操作指南本节介绍步进电机控制器的编程和操作方法。
4.1 控制器编程步进电机控制器支持多种编程方式,如C语言、Python等。
用户可以编写相应的代码实现对步进电机的控制和驱动。
4.2 控制器操作指南控制器提供用户友好的操作界面,通过按钮、旋钮等方式进行控制操作。
用户可以根据界面上的指示进行相应的参数设置、模式切换等操作。
五、常见问题与解答本节了一些常见问题,并提供相应的解答。
如果用户遇到其他问题,建议参考本节解答,若问题仍未解决,可联系技术支持人员。
人民电器 JD6A系列调速电机控制器 产品说明书

□ □ 环境温度: -15~40℃
□ 相对湿度:不大于85%(20℃一下时)
□ 振动频率:为10~150Hz 时,其最大振动加速不超过0.5g 。
□ 电网电压:幅值波动10%时,保证额定使用。
□ 周围介质:没有导电尘埃和能腐蚀金属和破坏绝缘的气体。
海拔高度:不超过1000米
□ :(□ 被控电机功率:0.55-90(千瓦)
□ 调速范围(50Hz ):1250~120(转/分)
□ 转速调整率:<0.5%(10%~100%的负载变化时)
□ 稳速精度:设定转速<±2转
□ 测速发电机:三相,>AC (30伏)/1500(转/分)时
□ 保护装置:拖动电机停转,超速保护控制器最大输出直流电压90(伏)电流 (安)容量 450瓦)
JD6系列调速电机控制器是全新设计的专用调速控制器产品,用于电磁调速异步电机的速度控制,实现恒转矩无级调速。
该控制器具有:操作简便、被控电机起动和运行平衡、控制精度高、数字显示以及派生的控制功能多等特点。
正常工作条件
主要技术数据
产品概述
选型指南
301
基本工作原理方框图
1 2 3 4 5 6 7
接线端子
输出接线图
产品结构
302
安装尺寸及外形尺寸
安装方式
用户订货时必须说明:
控制器的名称及型号;
控制器的可控电机功率(W);
数量。
例如:JD6A-40 数量100台。
□
□
□
订货须知
303。
MX2电机控制器用户手册说明书

•Current vector control•High starting torque: 200% at 0.5Hz•Double rating VT 120%/1min and CT 150%/1min•IM & PM motor control•Torque control in open loop vector•Positioning functionality•Built-in application functionality (i.e. Brake control)•Built-in logic programing•Safety embedded compliant with ISO13849-1 (double input circuit and external device monitor EDM)•USB port for PC programming•24VDC backup supply for control board•Fieldbus communications: Modbus, DeviceNet, Profibus, CompoNet, EtherCAT, ML-II and EtherNet/IP•PC configuration tool: CX-Drive•RoHS, CE, cULusRatings•200V Class single-phase 0.1 to 2.2kW•200V Class three-phase 0.1 to 15.0kW•400V Class three-phase 0.4 to 15.0kWType designation200 V class400 V classSingle-phase: 3G3MX2-@B001B002B004B00711.Three phase model use forced-air-cooling but single phase model is self cooling.B015B022-----Three-phase: 3G3MX2-@20012002200420072015202220372055207521102150MotorkW 22.Based on a standard 3-Phase standard motor.For VT setting 0.20.40.55 1.1 2.2 3.0 5.57.5111518.5For CT setting0.10.20.40.75 1.5 2.2 3.7 5.57.51115O u t p u t c h a r a c t e r i s t i c sInverter capacity kVA200 VT 0.40.6 1.2 2.0 3.3 4.1 6.710.313.819.323.9200 CT 0.20.5 1.0 1.7 2.7 3.8 6.08.611.416.220.7240 VT0.40.7 1.4 2.4 3.94.98.112.416.623.228.6240 CT0.30.6 1.2 2.0 3.3 4.57.210.313.719.524.9Rated output current (A) at VT 1.2 1.9 3.5 6.09.612.019.630.040.056.069.0Rated output current (A) at CT 1.01.63.05.08.011.017.525.033.047.060.0Max. output voltage Proportional to input voltage: 0..240 VMax. output frequency 400 HzP o w e r s u p p l yRated input voltage and frequencySingle-phase 200..240 V 50/60 Hz 3-phase 200..240 V 50/60 HzAllowable voltage fluctuation -15%..+10%Allowable frequency fluctuation5%Braking torqueAt short-time deceleration At capacitor feedback100%: <50Hz 50%: <60Hz 70%: <50Hz 50%: <60HzApprox 20%-Cooling methodSelf coolingForced-air-coolingThree-phase: 3G3MX2-@4004400740154022403040404055407541104150Motor kW 11.Based on a standard 3-Phase standard motor.For VT setting 0.75 1.5 2.2 3.0 4.0 5.57.5111518.5For CT setting0.40.75 1.5 2.2 3.0 4.0 5.57.51115O u t p u t c h a r a c t e r i s t i c sInverter capacity kVA380 VT 1.3 2.6 3.5 4.5 5.77.311.515.120.425.0380 CT 1.1 2.2 3.1 3.6 4.7 6.09.711.815.720.4480 VT1.7 3.4 4.4 5.77.39.214.519.125.731.5480 CT1.42.83.94.55.97.612.314.919.925.7Rated output current (A) at VT 2.1 4.1 5.46.98.811.117.523.031.038.0Rated output current (A) at CT 1.83.44.85.57.29.214.818.024.031.0Max. output voltage Proportional to input voltage: 0..480 VMax. output frequency 400 HzP o w e r s u p p l yRated input voltage and frequency 3-phase 380..480 V 50/60 HzAllowable voltage fluctuation-15%..+10%Allowable frequency fluctuation5%Braking torqueAt short-time deceleration At capacitor feedback100%: <50Hz 50%: <60Hz70%: <50Hz 50%: <60Hz-Cooling methodSelf coolingForced-air-coolingCommon specificationsModel number 3G3MX2SpecificationsC o n t r o l f u n c t i o n sControl methods Phase-to-phase sinusoidal pulse with modulation PWM (Sensorless vector control, V/F)Output frequency range 0.10..400.00 HzFrequency precisionDigital set value: ±0.01% of the max. frequencyAnalogue set value: ±0.2% of the max. frequency (25 ±10ºC)Resolution of frequency set valueDigital set value: 0.01HzAnalogue set value: 1/1000 of maximum frequencyResolution of output frequency 0.01HzStarting torque 200% / 0.5Hz Overload capability Dual rating:Heavy duty (CT): 150% for 1 minute Normal Duty (VT): 120% for 1 minuteFrequency set value 0 to 10VDC (10K Ω), 4 to 20mA (100Ω), RS485 Modbus, Network options V/f CharacteristicsConstant/ reduced torque, free V/fF u n c t i o n a l i t y Inputs signalsFW (forward run command), RV (reverse run command), CF1~CF4 (multi-stage speed setting), JG (jog command), DB (ex-ternal braking), SET (set second motor), 2CH (2-stage accel./decel. command), FRS (free run stop command), EXT (external trip), USP (startup function), CS (commercial power switchover), SFT (soft lock), AT (analog input selection), RS (reset), PTC (thermistor thermal protection), STA (start), STP (stop), F/R (forward/reverse), PID (PID disable), PIDC (PID reset), UP (re-mote control up function), DWN (remote control down function), UDC (remote control data clear), OPE (operator control), SF1~SF7 (multi-stage speed setting; bit operation), OLR (overload restriction), TL (torque limit enable), TRQ1 (torque limit changeover1), TRQ2 (torque limit changeover2), BOK (Braking confirmation), LAC (LAD cancellation), PCLR (position devi-ation clear), ADD (add frequency enable), F-TM (force terminal mode), ATR (permission of torque command input), KHC (Cu-mulative power clear), MI1~MI7 (general purpose inputs for Drive Programming), AHD (analog command hold), CP1~CP3 (multistage-position switches), ORL (limit signal of zero-return), ORC (trigger signal of zero-return), SPD (speed/position changeover), GS1~GS2 (STO inputs, safety related signals), 485 (Starting communication signal), PRG (executing Drive Programming), HLD (retain output frequency), ROK (permission of run command), EB (rotation direction detection of B-phase), DISP (display limitation), OP (option control signal), NO (no function), PSET (preset position)Output signalsRUN (run signal), FA1~FA5 (frequency arrival signal), OL,OL2 (overload advance notice signal), OD (PID deviation error sig-nal), AL (alarm signal), OTQ (over/under torque threshold), UV (under-voltage), TRQ (torque limit signal), RNT (run time ex-pired), ONT (power ON time expired), THM (thermal warning), BRK (brake release), BER (brake error), ZS (0Hz detection), DSE (speed deviation excessive), POK (positioning completion), ODc (analog voltage input disconnection), OIDc (analog current input disconnection), FBV (PID second stage output), NDc (network disconnect detection), LOG1~LOG3 (Logic out-put signals), WAC (capacitor life warning), WAF (cooling fan warning), FR (starting contact), OHF (heat sink overheat warn-ing), LOC (Low load), MO1~MO3 (general outputs for Drive Programming), IRDY (inverter ready), FWR (forward operation), RVR (reverse operation), MJA (major failure), WCO (window comparator O), WCOI (window comparator OI), FREF (frequen-cy command source), REF (run command source), SETM (second motor in operation), EDM (STO (safe torque off) perfor-mance monitor), OP (option control signal), NO (no function)Standard functionsFree-V/f, manual/automatic torque boost, output voltage gain adjustment, AVR function, reduced voltage start, motor data selection, auto-tuning, motor stabilization control, reverse running protection, simple position control, simple torque control, torque limiting, automatic carrier frequency reduction, energy saving operation, PID function, non-stop operation at instantaneous power failure, brake control, DC injection braking, dynamic braking (BRD), frequency upper and lowerlimiters, jump frequencies, curve accel and decel (S, U, inversed U,EL-S), 16-stage speed profile, fine adjustment of start frequency, accel and decel stop, process jogging, frequency calculation, frequency addition, 2-stage accel/decel, stop mode selection, start/end freq., analog input filter, window comparators, input terminal response time, output signal delay/hold function, rotation direction restriction, stop key selection, software lock, safe stop function, scaling function, displayrestriction, password function, user parameter, initialization, initial display selection, cooling fan control, warning, trip retry, frequency pull-in restart, frequency matching, overload restriction, over current restriction, DC bus voltage AVR Analogue inputs2 analogue inputs 0 to 10V (10K Ω), 4 to 20mA (100Ω)Pulse train input terminal 0 to 24V, up to 32kHzAccel/Decel times 0.01 to 3600.0s (line/curve selection), 2nd accel/decel setting availableDisplayStatus indicator LED’s Run, Program, Alarm, Power, Hz, AmpsDigital operator: Available to monitor 32 items: frequency reference, output current, output frequency...P r o t e c t i o n f u n c t i o n s Motor overload protection Electronic Thermal overload relay and PTC thermistor input Instantaneous overcurrent 200% of rated currentOverload Dual rating:Heavy duty (CT): 150% for 1 minute Normal Duty (VT): 120% for 1 minuteOvervoltage 800V for 400V type and 400V for 200V type Undervoltage345V for 400V type and 172.5V for 200V typeMomentary power loss Following items are selectable: Alarm, decelerates to stop, decelerates to stop with DC bus controlled, restart Cooling fin overheat Temperature monitor and error detectionStall prevention level Stall prevention during acceleration/deceleration and constant speed Ground faultDetection at power-onPower charge indication On when power is supplied to the control part A m b i e n t c o n d i t i o n sDegree of protection IP20Ambient humidity 90% RH or less (without condensation)Storage temperature -20ºC..+65ºC (short-term temperature during transportation)Ambient temperature -10︒C to 50ºC (Both the carrier frequency and output current need to be reduced over 40ºC)Installation Indoor (no corrosive gas, dust, etc.)Installation height Max. 1000mVibration5.9 m/s 2 (0.6G), 10 to 55 HzStandard modelsOption boardVoltage classInverter model 3G3MX2-A @FigureDimensions in mm W W1H H1t D D1D2d Weight (kg)Single-phase200 VB001-E 16856128118-10913.5--1.0B002-E 1.0B004-E 122.527 1.1B007-E 210896128118170.5554.4 4.51.4B015-E 1.8B022-E 1.8Three-phase200 V2001-E 16856128118-10913.5--1.02002-E 1.02004-E 122.527 1.12007-E 145.550 1.22015-E 210896128118170.555 4.4 4.51.62022-E 1.82037-E 31401281281185170.555 4.4 2.02055-E 140122260248615573.366 3.02075-E 3.42110-E 180160296284717597575.12150-E 220192350336847.4Three-phase400 V4004-E 210896128118-143.528--1.54007-E 170.5551.64015-E 1.84022-E 1.94030-E 1.94040-E 31401281281185170.555 4.4 4.5 2.14055-E 122260248615573.366 3.54075-E 3.54110-E 180160296284717597574.74150-E5.2Finless modelsVoltage class Inverter model3G3MX2-A@FigureDimensions in mmW W1H H1D D1Weight (kg)Single-phase200 V B001-P-E168561281181037.5 1.1 B002-P-EB004-P-EB007-P-E2108961281181237.5 1.8 B015-P-EB022-P-EThree-phase200 V 2001-P-E168561281181037.5 1.1 2002-P-E2004-P-E2007-P-E2015-P-E2108961281181237.5 1.8 2022-P-E2037-P-E31401281281181237.5 2.1Three-phase400 V 4004-P-E2108961281181237.5 1.8 4007-P-E4015-P-E4022-P-E4030-P-E4040-P-E31401281281181237.52.1Rasmi footprint filtersSchaffner footprint filtersInput AC Reactor Single-phaseThree-phaseRasmi modelDimensionsW H L X Y M 1x200 VAX-FIM1010-RE @714516915651M4AX-FIM1014-RE @1115016915691M4AX-FIM1024-RE @1115016915691M43x200 VAX-FIM2010-RE @825019418162M4AX-FIM2020-RE @1115016915691M4AX-FIM2030-RE @14450174161120M4AX-FIM2060-RE @15052320290122M5AX-FIM2080-RE @18862362330160M5AX-FIM2100-RE @22062415380192M63x400 VAX-FIM3005-RE @1144616915691M4AX-FIM3010-RE @1144616915691M4AX-FIM3014-RE @14450174161120M4AX-FIM3030-RE @15052306290122M5AX-FIM3050-RE @18262357330160M5Schaffner modelDimensionsW H L X Y A B M 1x200 VAX-FIM1010-SE @70401661565115050M5AX-FIM1014-SE @110451661569115080M5AX-FIM1024-SE @110501661569115080M53x200 VAX-FIM2010-SE @80401911816215050M5AX-FIM2020-SE @110501661569115080M5AX-FIM2030-SE @14250171161120150112M5AX-FIM2060-SE @14055304290122286112M5AX-FIM2080-SE @18055344330160323140M5AX-FIM2100-SE @22065394380192376180M53x400 VAX-FIM3005-SE @110501661569115080M5AX-FIM3010-SE @110501661569115080M5AX-FIM3014-SE @14250171161120150112M5AX-FIM3030-SE @14055304290122286112M5AX-FIM3050-SE @18055344330160323140M5VoltageReferenceDimensionsWeight kgABCDEFGH200 VAX-RAI02000070-DE 84113961016657.52 1.22AX-RAI01700140-DE 841131161016657.52 1.95AX-RAI01200200-DE 841131311016657.52 2.55AX-RAI00630240-DE 841131161016657.52 1.95VoltageReferenceDimensionsWeight kgAB2C2DEF200VAX-RAI02800080-DE 120701208052 5.5 1.78AX-RAI00880200-DE 120801208062 5.5 2.35AX-RAI00350335-DE 18085190140556 5.5AX-RAI00180670-DE 18085190140556 5.5400VAX-RAI07700050-DE 120701208052 5.5 1.78AX-RAI03500100-DE 120801208062 5.5 2.35AX-RAI01300170-DE 120801208062 5.5 2.50AX-RAI00740335-DE 18085190140556 5.5DC ReactorOutput AC ReactorVoltageReference Dimensions WeightkgABCD EFGH200VAX-RC21400016-DE 84113961016657.521.22AX-RC10700032-DE AX-RC06750061-DE 1051.60AX-RC03510093-DE AX-RC02510138-DE1161.95AX-RC01600223-DE 10813512412082 6.59.59.5 3.20AX-RC01110309-DE 120152136135947-5.20AX-RC00840437-DE 1466.00AX-RC00590614-DE 150177160160115211.4AX-RC00440859-DE 182.614.3400VAX-RC43000020-DE 84113961016657.52 1.22AX-RC27000030-DE 105 1.60AX-RC14000047-DE AX-RC10100069-DE116 1.95AX-RC06400116-DE 10813513312082 6.59.59.53.70AX-RC04410167-DE 120152136135947- 5.20AX-RC03350219-DE 146 6.00AX-RC02330307-DE 1501771601601157211.4AX-RC01750430-DE18314.3VoltageReference Dimensions Weight kg A B2C2D E F 200VAX-RAO11500026-DE 120701208052 5.5 1.78AX-RAO07600042-DE 120701208052 5.5 1.78AX-RAO04100075-DE 120801208062 5.5 2.35AX-RAO03000105-DE 120801208062 5.5 2.35AX-RAO01830180-DE 18085195140556 5.5AX-RAO01150220-DE 18085195140556 5.5AX-RAO00950320-DE 18085210140556 6.5AX-RAO00630430-DE 180952101406569.1AX-RAO00490640-DE 18010521014075611.7400VAX-RAO16300038-DE 120801208062 5.5 2.35AX-RAO11800053-DE 120801208062 5.5 2.35AX-RAO07300080-DE 18095195140556 5.5AX-RAO04600110-DE 18085195140556 5.5AX-RAO03600160-DE 18085210140556 6.5AX-RAO02500220-DE 180952101406569.1AX-RAO02000320-DE24011027520075616.0Reference Fig D(diameter)Motor (kW)Dimensions (mm)Weight (kg) A B C D E F G(diameter)AX-FER2102-PE121<2.286245021701240.09 AX-FER2815-PE28< 151062565289012.50.22 AX-FER5045-PE250< 4515051112501253050.53Resistor dimensionsTypeFig.DimensionsWeight LHMITGNkgAX-REM00K1400-IE 1105273694---0.2AX-REM00K2070-IE AX-REM00K2120-IE AX-REM00K2200-IE AX-REM00K4075-IE 2002736189---0.425AX-REM00K4035-IE AX-REM00K4030-IE AX-REM00K5120-IE 2602736249---0.58AX-REM00K6100-IE 3202736309---0.73AX-REM00K6035-IE AX-REM00K9070-IE 22006110074.521640230 1.41AX-REM00K9020-IE AX-REM00K9017-IE AX-REM01K9070-IE 33657310535070--4AX-REM01K9017-IE AX-REM02K1070-IE 4310100240295210--7AX-REM02K1017-IE AX-REM03K5035-IE 365100240350210--8AX-REM03K5010-IE168134520182AX-REM00K15xxxFig 1Fig 3Fig 4Fig 2Standard connectionsTerminal Block SpecificationsTerminal Name Function (signal level)R/L1, S/L2, T/L3Main circuit power supply input Used to connect line power to the drive.Drives with single-phase 200V input power use only terminals R/L1 and N (T/L3), terminalS/L2 is not available for these unitsU/T1, V/T2, W/T3Inverter output Used to connect the motorPD/+1, P/+External DC reactor terminal Normally connected by the short-circuit bar. Remove the short-circuit bar between +1 and P/+2 when a DC reactor is connected.P/+, N/-Regenerative braking unit terminal Connect optional regenerative braking units (If a braking torque is required) P/+, RB Braking resistor terminals Connect option braking resistor (if a braking torque is required) Grounding For grounding (grounding should conform to the local grounding code.)MX211Control CircuitSide by side mountingInverter heat lossSingle-phase 200 V classTypeNo.Signal nameFunctionSignal level D i g i t a l i n p u t s i g n a l sPLC Intelligent input common Source type: connecting [P24] to [1]-[7] turns inputs ON Sink type: connecting [L] to [1]-[7] turns inputs ON -P24Internal 24 VDC24 VDC, 30mA24VDC, 100mA1Multi-function Input selection 1Factory setting: Forward/ Stop 27 VDC max 2Multi-function Input selection 2Factory setting: Reverse/ Stop 3/GS1Multi-function Input selection 3 / safe stop input 1Factory setting: External trip 4/GS2Multi-function Input selection 4 / safe stop input 2Factory setting: Reset5/PTC Multi-function Input selection 5 / PTC thermistor input Factory setting: Multi-step speed reference 16Multi-function input selection 6Factory setting: Multi-step speed reference 27/EB Multi-function input selection 7 / Pulse train input B Factory setting: Jog LMulti-function Input selection common (in upper row)----P u l s e t r a i nEA Pulse train input A Factory setting: Speed reference 32kHz max 5 to 24VDC EO Pulse train outputLAD frequency 10VDC 2mA 32kHz max A n a l o g i n p u t s i g n a lH Frequency reference power supply 10 VDC 10mA max O Voltage frequency reference signal 0 to 10VDC (10k Ω)OI Current frequency reference signal 4 to 20mA (250Ω)L Frequency reference common (bottom row)--D i g i t a l o u t p u t s i g n a l s11/EDMDiscrete logic output 1 / EDM output Factory setting: During Run27 VDC, 50mA max EDM based on ISO13849-112Discrete logic output 2Factory setting: Frequency arrival type 1CM2GND logic output --AL0Relay common contact Factory setting: Alarm signal Under normal operation AL1 - AL0 Closed AL2 - AL0 OpenR load250VAC 2.5A 30VDC 3.0A I load250VAC 0.2A 30VDC 0.7A AL1Relay contact, normally open AL2Relay contact, normally closed M o n i t o r S i g n a lAM Analog voltage outputFactory setting: LAD frequency0 to 10VDC 1mA C o m m s SP Serial communication terminal RS485 Modbus communicationSNModel 3G3MX2AB001AB002AB004AB007AB015AB022InvertercapacitykVA200V VT0.40.6 1.2 2.0 3.3 4.1200V CT0.20.5 1.0 1.7 2.7 3.8240V VT0.40.7 1.4 2.4 3.9 4.9240V CT0.30.6 1.2 2.0 3.3 4.5Rated current (A) VT 1.2 1.9 3.4 6.09.612.0Rated current (A) CT 1.0 1.6 3.0 5.08.011.0Total heat loss 1222304879104Efficiency at rated load89.59093949595.5Cooling MethodSelf coolingForced-air-coolingEnclo su re100mm100mm50mm12Frequency invertersThree-phase 200 V classThree-phase 400 V classInput AC ReactorDC ReactorOutput AC ReactorModel 3G3MX2A2001A2002A2004A2007A2015A2022A2037A2055A2075A2110A2150Inverter capacitykVA200 VT0.40.6 1.2 2.0 3.3 4.1 6.710.313.819.323.9200 CT 0.20.5 1.0 1.7 2.7 3.8 6.08.611.416.220.7240 VT 0.40.7 1.4 2.4 3.9 4.98.112.416.623.228.6240 CT0.30.6 1.2 2.0 3.3 4.57.210.313.719.524.9Rated current (A) VT 1.2 1.9 3.4 6.09.612.019.630.040.056.069.0Rated current (A) CT 1.0 1.6 3.0 5.08.011.017.525.033.047.060.0Total heat loss 1222304879104154229313458625Efficiency at rated load89.59093949595.59696969696Cooling MethodSelf coolingForced-air-coolingModel 3G3MX2A4004A4007A4015A4022A4030A4040A4055A4075A4110A4150Inverter capacitykVA380V VT1.32.63.54.55.77.311.515.120.425.0380V CT 1.1 2.2 3.1 3.6 4.76.09.711.815.720.4480V VT 1.7 3.4 4.4 5.77.39.214.519.125.731.5480V CT1.42.83.94.55.97.612.314.919.925.7Rated current (A) VT 2.1 4.1 5.46.98.811.117.523.031.038.0Rated current (A) CT 1.8 3.4 4.8 5.57.29.214.818.024.031.0Total heat loss 355696116125167229296411528Efficiency at rated load9293949596969696.296.496.6Cooling MethodSelf coolingForced-air-cooling1 phase 200 V class3 phase 200 V class 400 V class Max. ap-plicable motor output kWReference Current value A Induc-tance mH Max. ap-plicablemotoroutput kW Reference Current value A Induc-tance mHMax. ap-plicablemotor out-put kWReference Current value A Induc-tance mH 0.4AX-RAI02000070-DE 7.0 2.0 1.5AX-RAI02800080-DE8.0 2.8 1.5AX-RAI07700050-DE5.07.70.75AX-RAI01700140-DE 14.0 1.7 3.7AX-RAI00880200-DE 20.00.88 4.0AX-RAI03500100-DE 10.0 3.51.5AX-RAI01200200-DE 20.0 1.27.5AX-RAI00350335-DE 33.50.357.5AX-RAI01300170-DE 17.0 1.32.2AX-RAI00630240-DE24.00.6315AX-RAI00180670-DE67.00.1815AX-RAI00740335-DE33.50.74200 V class400 V classMax. applicable motor output kWReference Current valueA InductancemH Max. applicable motor output kWReference Current valueAInductancemH 0.2AX-RC21400016-DE 1.621.40.4AX-RC43000020-DE2.043.00.4AX-RC10700032-DE 3.210.70.7AX-RC27000030-DE 3.027.00.7AX-RC06750061-DE 6.1 6.75 1.5AX-RC14000047-DE4.714.01.5AX-RC03510093-DE 9.3 3.51 2.2AX-RC10100069-DE 6.910.12.2AX-RC02510138-DE 13.8 2.51 3.0 to 4.0AX-RC06400116-DE 11.6 6.403.7AX-RC01600223-DE 22.3 1.605.5AX-RC04410167-DE 16.7 4.415.5AX-RC01110309-DE 30.9 1.117.5AX-RC03350219-DE 21.9 3.357.5AX-RC00840437-DE 43.70.8411.0AX-RC02330307-DE 30.7 2.3311.0AX-RC00590614-DE 61.40.5915.0AX-RC01750430-DE 43.01.7515.0AX-RC00440859-DE 85.90.44–200 V class400 V classMax. applicable motor output kWReferenceCurrent value AInductancemH Max. applicable motor output kWReferenceCurrent value A InductancemH 0.4AX-RAO11500026-DE 2.611.50 1.5AX-RAO16300038-DE 3.816.300.75AX-RAO07600042-DE 4.27.601.5AX-RAO04100075-DE 7.5 4.102.2AX-RAO03000105-DE 10.5 3.00 2.2AX-RAO11800053-DE 5.311.803.7AX-RAO01830160-DE 16.0 1.83 4.0AX-RAO07300080-DE 8.07.305.5AX-RAO01150220-DE 22.0 1.15 5.5AX-RAO04600110-DE 11.0 4.607.5AX-RAO00950320-DE 32.00.957.5AX-RAO03600160-DE 16.0 3.6011AX-RAO00630430-DE 43.00.6311AX-RAO02500220-DE 22.0 2.5015AX-RAO00490640-DE 64.00.4915AX-RAO02000320-DE32.02.003G3MX2Specifications ModelVoltage classConstant torque Variable torqueStandard Finless Max motor kW Rated current A Max motor kW Rated current ASingle-phase200 V0.1 1.00.2 1.23G3MX2-AB001-E3G3MX2-AB001-P-E 0.2 1.60.4 1.93G3MX2-AB002-E3G3MX2-AB002-P-E 0.4 3.00.55 3.53G3MX2-AB004-E3G3MX2-AB004-P-E0.75 5.0 1.1 6.03G3MX2-AB007-E3G3MX2-AB007-P-E1.58.02.29.63G3MX2-AB015-E3G3MX2-AB015-P-E2.211.03.012.03G3MX2-AB022-E3G3MX2-AB022-P-EThree-phase200 V0.1 1.00.2 1.23G3MX2-A2001-E3G3MX2-A2001-P-E 0.2 1.60.4 1.93G3MX2-A2002-E3G3MX2-A2002-P-E 0.4 3.00.55 3.53G3MX2-A2004-E3G3MX2-A2004-P-E0.75 5.0 1.1 6.03G3MX2-A2007-E3G3MX2-A2007-P-E1.58.02.29.63G3MX2-A2015-E3G3MX2-A2015-P-E2.211.03.012.03G3MX2-A2022-E3G3MX2-A2022-P-E3.717.5 5.519.63G3MX2-A2037-E3G3MX2-A2037-P-E 5.525.07.530.03G3MX2-A2055-E-7.533.01140.03G3MX2-A2075-E-1147.01556.03G3MX2-A2110-E-1560.018.569.03G3MX2-A2150-E-Three-phase400 V0.4 1.80.75 2.13G3MX2-A4004-E3G3MX2-A4004-P-E0.75 3.4 1.5 4.13G3MX2-A4007-E3G3MX2-A4007-P-E1.5 4.82.2 5.43G3MX2-A4015-E3G3MX2-A4015-P-E2.2 5.53.0 6.93G3MX2-A4022-E3G3MX2-A4022-P-E3.07.24.08.83G3MX2-A4030-E3G3MX2-A4030-P-E4.09.25.511.13G3MX2-A4040-E3G3MX2-A4040-P-E5.514.87.517.53G3MX2-A4055-E-7.518.01123.03G3MX2-A4075-E-1124.01531.03G3MX2-A4110-E-1531.018.538.03G3MX2-A4150-E-MX21314Frequency invertersA Line filtersA Input AC reactorsA DC reactorsInverterStandard line filterLow leakage line filterRasmiSchaffner Rasmi SchaffnerVoltage Model 3G3MX2-@Reference AX-FIM Current (A)Reference AX-FIM Current (A)ReferenceAX-FIM Current (A)Reference AX-FIM Current (A)1Phase 200 VACAB001 / AB002 /AB0041010-RE 101010-SE-V181010-RE-LL 101010-SE-LL 10AB007 1014-RE 141014-SE-V1141014-RE-LL 141014-SE-LL 14AB015 / AB0221024-RE 241024-SE-V1271024-RE-LL 241024-SE-LL243Phase 200 VACA2001 / A2002 / A2004 / A20072010-RE 102010-SE-V17.82010-RE-LL 10--A2015 / A20222020-RE 202020-SE-V1162020-RE-LL 202020-SE-LL 20A20372030-RE 302030-SE-V1252030-RE-LL 302030-SE-LL 30A2055 / A20752060-RE 602060-SE-V1502060-RE-LL 602060-SE-LL50A21102080-RE 802080-SE-V1702080-RE-LL 80--A21502100-RE 1002100-SE-V1752100-RE-LL 100--3Phase 400 VACA4004 / A40073005-RE 53005-SE-V163005-RE-LL 53005-SE-LL 5A4015 / A4022 /A40303010-RE 103010-SE-V1123010-RE-LL 103010-SE-LL 10A40403014-RE 143014-SE-V1153014-RE-LL 143014-SE-LL 15A4055 / A40753030-RE 303030-SE-V1293030-RE-LL 303030-SE-LL 30A4110 / A41503050-RE503050-SE-V1483050-RE-LL503050-SE-LL50InverterAC Reactor VoltageModel 3G3MX2-@Reference 1-Phase 200 VACAB002 / AB004AX-RAI02000070-DE AB007AX-RAI01700140-DE AB015AX-RAI01200200-DE AB022AX-RAI00630240-DE 3-Phase 200 VACA2002 / A2004 / A2007AX-RAI02800080-DE A2015 / A2022 / A2037AX-RAI00880200-DE A2055 / A2075AX-RAI00350335-DE A2110 / A2150AX-RAI00180670-DE 3-Phase 400 VACA4004 / A4007 / A4015AX-RAI07700050-DE A4022 / A4030 / A4040AX-RAI03500100-DE A4055 / A4075AX-RAI01300170-DE A4110 / A4150AX-RAI00740335-DE200V 1-phase200V 3-phase400V 3-phaseInverter DC Reactor Inverter DC Reactor Inverter DC Reactor 3G3MX2-AB001AX-RC10700032-DE 3G3MX2-A2001AX-RC21400016-DE 3G3MX2-A4004AX-RC43000020-DE 3G3MX2-AB0023G3MX2-A20023G3MX2-A4007AX-RC27000030-DE 3G3MX2-AB004AX-RC06750061-DE 3G3MX2-A2004AX-RC10700032-DE 3G3MX2-A4015AX-RC14000047-DE 3G3MX2-AB007AX-RC03510093-DE 3G3MX2-A2007AX-RC06750061-DE 3G3MX2-A4022AX-RC10100069-DE 3G3MX2-AB015AX-RC02510138-DE 3G3MX2-A2015AX-RC03510093-DE 3G3MX2-A4030 / A4040AX-RC06400116-DE3G3MX2-AB022AX-RC01600223-DE3G3MX2-A2022AX-RC02510138-DE 3G3MX2-A4055AX-RC04410167-DE -3G3MX2-A2037AX-RC01600223-DE 3G3MX2-A4075AX-RC03350219-DE 3G3MX2-A2055AX-RC01110309-DE 3G3MX2-A4110AX-RC02330307-DE 3G3MX2-A2075AX-RC00840437-DE 3G3MX2-A4150AX-RC01750430-DE3G3MX2-A2110AX-RC00590614-DE –3G3MX2-A2150AX-RC00440859-DEMX215A ChokesA Output AC reactorB AccessoriesC Communication option boardsModel DiameterDescriptionAX-FER2102-PE 21For 2.2 KW motors or below AX-FER2815-PE 28For 15 KW motors or below AX-FER5045-PE50For 45 KW motors or belowInverterAC Reactor VoltageModel 3G3MX2-@Reference 200 VACAB001 / AB002 / AB004A2001 / A2002 / A2004AX-RAO11500026-DE AB007 / A2007AX-RAO07600042-DE AB015 / A2015AX-RAO04100075-DE AB022 / A2022AX-RAO03000105-DE A2037AX-RAO01830160-DE A2055AX-RAO01150220-DE A2075AX-RAO00950320-DE A2110AX-RAO00630430-DE A2150AX-RAO00490640-DE 400 VACA4004 / A4007 / A4015AX-RAO16300038-DE A4022AX-RAO11800053-DE A4030 / A4040AX-RAO07300080-DE A4055AX-RAO04600110-DE A4075AX-RAO03600160-DE A4110AX-RAO02500220-DE A4150AX-RAO02000320-DETypes Model Description FunctionsD i g i t a l o p e r a t o rAX-OP05-ELCD remote operator 5 Line LCD remote operator with copy function, cable length max. 3m.3G3AX-CAJOP300-EERemote operator cable 3 meters cable for connecting remote operator 3G3AX-OP01LED remote operator LED remote operator, cable length max. 3m 4X-KITMINI Mounting kit for LED operatorMounting kit for LED operator on panel3G3AX-OP05-H-EOperator holderHolder to put the AX-OP05-E inside of the cabinetA c c e s s o r i e sAX-CUSBM002-E PC configuration cable Mini USB to USB connector cableTypesModel Description FunctionsC o m m u n i c a t i o n o p t i o n s3G3AX-MX2-PRTProfibus option card Used for running or stopping the inverter, setting or referencing parameters, and monitoring output frequency, output current, or similar items through communications with the host con-troller.3G3AX-MX2-DRT DeviceNet option card 3G3AX-MX2-ECT EtherCA T option card 3G3AX-MX2-CRT CompoNet option card 3G3AX-MX2-MRT MECHA TROLINK-II option card3G3AX-MX2-EIPEtherNet/IP option cardI /O o p t i o n3G3AX-MX2-EIO15-E Extra input/output option board1 analog voltage input, 1 analog current input, 1 analog voltage output, 8 discrete logic inputs, 4 discrete logic outputs。
电动机控制器的说明书
电动机控制器的说明书在控制电动机的时候,电动机控制器充当着非常重要的角色。
本说明书旨在向用户提供对于电动机控制器使用和功能的深入理解。
通过本文的详细讲解,您将了解到电动机控制器的工作原理、性能特点,以及如何使用和维护它。
一、电动机控制器的工作原理电动机控制器是通过控制电流的方向和大小来实现对电动机的控制的。
当电动机控制器的电源开启时,控制器会向电机供电,从而控制电机的运作。
当电动机控制器的电源关闭时,电机则停止运转。
电动机控制器的工作原理可以通过以下几个方面进行阐述。
首先,电动机控制器需要有电源,并按照一定的逻辑来进行操作。
当电源与电机相连时,电机的运转速度就由电机控制器所控制了。
另外,电动机控制器的工作原理还包括:通过简单的路线安排和电流变化实现对电机的控制,通过测量数据来控制运转电机的速度和方向,通过热保护和电压保护来保护电机防止过热或过电压。
在使用电动机控制器的时候,需要注意电源的稳定性和接线的正确性。
如果电源出现异常或是电机线路发生故障,都会对电机控制器的使用产生影响。
二、电动机控制器的性能特点电动机控制器的性能特点主要包括以下几个方面:1.高效性电动机控制器可以实现对电机的高效控制,能够使电机达到更高的效率和更好的性能。
2.稳定性电动机控制器的控制效果十分稳定,能够对电机转动的速度和方向进行有效控制。
3.多功能性电动机控制器具有很强的多功能性,能够适用于不同的电机型号和不同的工作环境。
4.安全性电动机控制器可以通过限流、热保护、电压保护等方式来保证电机控制器的安全使用,避免对人员、设备和环境造成安全隐患。
5.节能性电动机控制器能够通过控制电机转速等参数来实现节能效果,从而减少能源的消耗。
三、如何使用和维护电动机控制器为了确保电动机控制器的正常使用和便于维护,在使用和维护过程中需要注意以下几个方面:1.使用方法在使用前,请先阅读本说明书和相关性能参数,并按照说明使用、安装电动机控制器。
2.检修和维护在控制器使用过程中,需要定期对控制器进行检查、维护,以确保其稳定运作。
电机控制器操作手册说明书

GridPointEC Motor ControllerOperation ManualTWIN CITY FAN COMPANIES, LTD. | 5959 TRENTON LANE N. | MINNEAPOLIS, MN | 763-551-7600Instructions 1. Fan must be running when the controller is used.2. Turn the controller on and plug it into the motor. It will automatically connect.3. The display will show the current speed. Power, Connect and Direction LEDs will be on.4. If the Up arrow is pressed, the display will show E000 (no error), max speed, constant speed, d000 (direction) and C000 (motor operation mode 0).5. To set the maximum speed:a. Press ‘SET’ for 2s.b. Press the Up or Down arrow to display P000.c. Press ‘OK’. This will display the current maximum speed.d. Press the Up or Down arrow to change the digit. To move to the next digit, press and hold the Up arrow until the next digit flashes. Keep changing values until the desired speed is reached.e. Press ‘OK’ to save the value. Press ‘OK’ again to go back to the first display.Troubleshooting Guidelines Cannot connect to motor: Check the cord and connections between the controller and the motor.Motor does not run in Constant speed mode (P008 = 0): Update the value in parameter P001.Motor does not run in 0-10V mode: Check the voltage supply.Unable to change screens: Cycle power on GridPoint.Wheel rotation is incorrect: Contact TCFC Customer Service Department for support.Safety Precautions When operating GridPoint, please keep a safe distance from the fan. Maintenance and repair work should be carried out by trainedprofessionals.Parameters P001 and P008 are not read by the controller and default to ‘0’ when turned on. If the ‘M’ button is pushed without updating these values, the motor will be set at constant speed, 0 RPM.WARNING: Motor is still energized at constant speed, 0 RPM.f. Press ‘O’ for 2s to send the command to the motor.6. To set the speed for Constant speed operation:a. Press ‘SET’ for 2s.b. Press Up or Down arrow to select P001.c. Press ‘OK’. The default value is ‘0’. Change to desired speed by following steps 5d and 5e.d. Press ‘M’ for 2s to send the command to the motor.7. To set motor operation mode:a. Press ‘SET’ for 2s.b. Press the Up or Down arrow to display P008.c. Press ‘OK’.d. Arrow Up or Down to select desired mode. (See Parameters section above for functionality.)e. Press ‘OK’ to save the value.f.Press ‘M’ for 2s to send the command to the motor.RPM Top Speed 200 RPM 00.8V 9.6V 10V VOLTAGESmart EC Motors Grid Smart。
SC-3控制器说明书

SC-3可编程步进电机控制器1概述:CNC 可编程步进电机控制器可与步进电机驱动器、步进电机组成一个完善的步进电机控制系统,能控制三台步进电机分时运行本控制器采用计算机式的编程语言,拥有输入、输出、计数等多种指令。
具有编程灵活、适应范围广等特点,可广泛应用于各种控制的自动化领域2特性及指标:z 可控制3台步进电机(分时工作)z 可编99段程序指令(不同的工作状态) z 10条升降速曲线选择z 最高输出频率:8KPPS(脉冲/秒) z 可接受外接信号控制(8点输入)z 可控制外部其它部件工作(8点输出24V信号)z 数码显示,可显示当前的运行状态、脉冲、产量计数等 z 采用超高速单片机控制,采用共阳接法3接线端子说明: 1 2 3 4 5 6 7 8 9 10 11 12 24V GNDPUL1DIR1PUL2DIR2PUL3DIR3IN1IN2IN3IN413 14 15 16 17 18 19 20 21 22 23 24 IN5IN6IN7IN8OUT1OUT2OUT3OUT4OUT5OUT6OUT7OUT81 24V 直流电源正极(驱动器PUL+、DIR+、ENA+接此端口,高电平输入开关信号接口)2 24V 直流电源负极(低电平输入开关信号接口)3 PUL1 一号电机脉冲接口4 DIR1 一号电机方向接口5 PUL2 二号电机脉冲接口6 DIR2 二号电机方向接口7 PUL3 三号电机脉冲接口8 DIR3 三号电机方向接口9 IN1——IN8 输入口(可接霍尔、光电、接近开关等信号端。
)10 OUT1——OUT8输出口(输出开关量电源功率由外部24V 电源功率决定)4按钮说明:按钮 名称 按钮说明 编辑状态(EDIT )按确认按钮进入程序编辑状态。
用增加按钮、减小按钮编辑1~99条指令,在编辑状态按确认按钮进入指令编辑,按增加按钮,减小按钮选择命令名称,按移位按钮选择修改指令参数。
修改完成后按确认按钮保存 STEP1一号电机手动正、反转测试(按住运行按钮电机运转,按移位按钮可改变电机方向,按增加按钮、减小按钮可改变加速曲线) STEP2二号电机手动正、反转测试(按住运行按钮电机运转,按移位按钮可改变电机方向,按增加按钮、减小按钮可改变电机转速,按确认按钮可该变加速曲线) STEP3三号电机手动正、反转测试(按住运行按钮电机运转,按移位按钮可改变电机方向,按增加按钮、减小按钮可改变电机转速,按确认按钮可该变加速曲线)IORESET 输入输出口测试,(按住运行按钮进入测试状态,按移位按钮移动,按增加按钮、减小按钮选择对应接口,从左到右分别是1——8) RESET 可将计数清零测试按钮 按钮测试,一一对应移位按钮增加、上翻页减小、下翻页确定按钮运行按钮 自动状态必须先按一下此按钮,外部控制信号才能有效停止按钮--按1次可停止系统工作,按2次可以推出自动运行状态,这时按住停止按钮和手动测试按钮可进入指令编辑状态,不是专业人员,请不要修改指令程序5指令介绍:编号 指令名称 命令 参数 Y Z X 说明1 电机方向设定 DIR Y-XXXXX 1~3 - 0/1 电机Y设定方向为XXXXX,X=0:正转,X=1:反转2 电机运行速度 SPD Y-XXXXX 1~3 - 1~99 电机Y设定速度为XXXXX3 电机加速曲线 ACC Y-XXXXX 1~3 - 0~9 电机Y设定加速曲线为XXXXX4 电机运转 PLUS Y-XXXXX 1~3 - 0~59999 电机Y运转XXXXX个脉冲后停止(如果XXXXX='FFFFF'电机运转无限多个脉冲)5 电机定位运转1 STEPL YZ-XXXXX1~3 1~8输入口0~59999 电机Y运转XXXXX个脉冲后停止(如果XXXXX='FFFFF'电机运转无限多个脉冲,期间只要检测到Z端口输入低电平电机立即停止)6 电机定位运转2 STEPH YZ-XXXXX1~3 1~8输入口0~59999 电机Y运转XXXXX个脉冲后停止(如果XXXXX='FFFFF'电机运转无限多个脉冲,期间只要检测到Z端口输入高电平电机立即停止)7 等待端口输入1 WAIT Y-XXXXX 0/1 - 1~8输入口程序暂停一直等到端口XXXXX输入Y电平在执行下一条指令,Y=0:低电平,Y=1:高电平8 端口输出 OUT XXXXXXXX- - 0/1 端口输出控制:1-打开,0-关闭,从左到右为1-8号口。
电动机控制器说明书

电动机控制器说明书一、概述:JL-211微电脑电动机控制保护器是我公司在多年研制电机保护产品的基础上开发出的新一代微电脑电流控制继电器。
此产品以微电脑控制器(MCU)为核心元件,通过高精度CT检测电流,保护器具有自动线性修正功能,在宽电流范围内仍具有较高的测量精度。
本产品具有性价比高、功能齐全、工作稳定可靠、精度高、动作准确、安装、参数设定简单方便等特点。
可广泛适用于机械、冶金、电力、建材、化工、纺织行业等工业三相电动机及其它电器的控制与监测。
JL-211微电脑电动机控制保护器一般用于电机拖动的机械设备自动控制,可代替普通过电流及欠电流继电器。
二、JL-211微电脑电动机控制保护器产品主要特点:1、动作电流值和动作时间可根据使用情况任意设定。
2、复位电流值可任意设定,以避免运行电流在动作电流值附近时控制保护继电器频繁切换。
3、输出继电器可设置成上电吸合或上电不吸合状态。
4、具有自动和手动两种故障保护复位方式;选用自动复位时须设置复位时间,此时也可断电复位(即切断保护器电源)。
5、相序保护功能可开启或关闭。
6、采用交流同步采样和先进的数字信号处理算法,实现了实时数据处理和高精密性,有着卓越的可靠性,具有响应速度快、测量准确、精度高等优点。
7、采用专用宽温度高清晰中文液晶显示,正常工作时显示三相电流值以及保护器工作电源电压值;采用模块化设计结构,产品体积小,结构紧凑,安装方便,在低压控制终端柜和1/4模数及以上各种抽屉柜中可直接安装使用,提高了控制线路的可靠性和自动化水平。
8、结构紧凑、华丽、精湛、优美的外观和卓越的设计体现了高雅、精致、紧凑的产品。
完善的事故记录及自检功能,友好的人机界面,所有测量值和参数等由面板液晶显示器实时显示。
三、JL-211微电脑电动机控制保护器技术参数规格:直接接线1A(0.2A~1A);5A(1A~5A);20A(4A~20A);40A(8A~40A);穿芯式:100A(20A~100A);采用外置标准5A电流互感器(用户自配):150A(30A~150A);200A(40A~200A);300A(60A~300A);400A(80A~400A);500A(100A~500A);600A(120A~600A);800A(160A~800A);JL-211微电脑电动机控制保护器正常使用条件>>>适用主回路电压:AC380V,50Hz。
步进电机控制器--说明书

电机,伺服电机可编程控制器AKS-01Z使用说明一、系统特点●控制轴数:单轴;●指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制);●最高输出频率:40KHz(特别适合控制细分驱动器);●输出频率分辨率:1Hz;●编程条数:99条;输入/1234、5、6一表示按键。
后面板图及信号说明:后面板图为接线端子,包括:1、CP、CW、OPTP为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中:CP————步进脉冲信号CW————电机转向电平信号OPTO————前两路信号的公共阳端CP、CW的状态分别对应面板上的指示灯2、启动:启动程序自动运行,相当于面板上的启动键。
3、停止:暂停正在运行的程序,相当于面板上的停止键,再次启动后,程序继续运行。
4、A操作和B操作是本控制器的一大特点:对于步进电机,我们一般进行定量定位控制,如控制电机以一定的速度运行一定的位移这种方式很容易解决,只需把速度量和位移量编程即可。
但还有相当多的控制是不能事先定位的,例如控制步进电机从起始点开始朝一方向运行,直到碰到一行程开关后停止,当然再反向运行回到起始点。
再例如要求步进电机在两个行程开关之间往复运行n次,等等。
在这些操作中,我们事先并不知道步进电机的位移量的具体值,又应当如何编程呢?本控制器利用:“中断操作”,我们称之为“A操作”和“B操作”。
以“A操作”为例,工作流程为:当程序在运行时,如果“A操作”又信号输入,电机作降速停止,程序在此中断,程序记住了中断处的座标,程序跳转到“A操作”入口地址所指定的程序处运行程序。
5、输入1和输入2通过开关量输入端。
6、输出1、输出2和输出3通过开关量输出端。
7、C OM+、COM—输入输出开关量外部电源,本电源为DC12V/0.3A,COM+为正端,COM—为负端,此电源由控制器内部隔离提供。
8、成后按参数分两行显示,第一行显示参数的名称,第二行显示参数数据。
参数修改方式:进入参数设定状态后,首先显示第一行[JF-------]。
电动机控制器说明书
电动机控制器说明书本文档为电动机控制器说明书,旨在为用户提供详细的使用指南和相关信息。
请用户仔细阅读本文,并按照说明进行操作。
1:产品概述1.1 产品简介本产品是一种电动机控制器,用于控制电动机的启动、停止和运行等操作。
它采用先进的控制算法和电路设计,具有稳定性高、效率高、操作简便等特点。
1.2 产品特点(产品的特点,如输入电压范围、输出功率、工作温度等)2:安装与连接在安装和连接控制器时,请严格按照以下步骤进行操作:2.1 安装步骤(详细描述如何正确安装电动机控制器,包括所需工具和注意事项)2.2 连接步骤(详细描述如何正确连接控制器和电动机以及其他外部设备,包括接线方式和注意事项)3:控制器参数设置为了满足不同的电动机工作需求,控制器提供了一些可调参数,用户可以根据需求进行设置。
3.1 参数说明(详细介绍每个可调参数的含义和取值范围)3.2 参数设置方法(描述如何进入参数设置界面并设置各个参数的方法)4:控制器运行与调试在正式使用控制器之前,请先进行以下的运行和调试工作。
4.1 运行测试(描述如何进行控制器的运行测试,包括启动、停止、调速等操作)4.2 故障排除(可能出现的故障现象和排除方法)5:安全使用和维护为了确保用户的人身安全和设备正常工作,请用户遵守以下安全使用和维护规定。
5.1 安全使用(一些安全使用规定,如禁止在潮湿环境下使用、禁止超负荷运行等)5.2 维护注意事项(一些维护注意事项,如定期清洁、定期检查电气连接等)6:附件本文档附带以下附件(附件名称和内容),请查看相应附件以获取更详细的信息。
7:法律名词及注释7.1 电动机电动机,指将电能转化为机械能的装置。
7.2 控制器控制器,用于对电动机进行启动、停止和调速等操作的设备。
(根据需要其他法律名词及其注释)。
步进电机控制器说明书
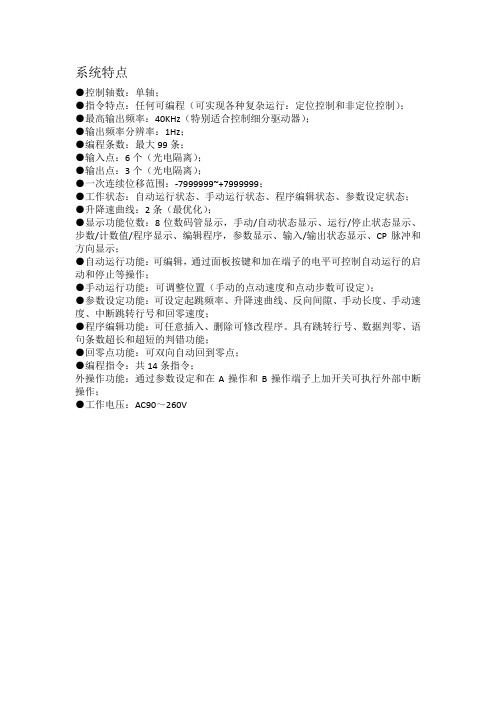
系统特点●控制轴数:单轴;●指令特点:任何可编程(可实现各种复杂运行:定位控制和非定位控制);●最高输出频率:40KHz(特别适合控制细分驱动器);●输出频率分辨率:1Hz;●编程条数:最大99条;●输入点:6个(光电隔离);●输出点:3个(光电隔离);●一次连续位移范围:-7999999~+7999999;●工作状态:自动运行状态、手动运行状态、程序编辑状态、参数设定状态;●升降速曲线:2条(最优化);●显示功能位数:8位数码管显示,手动/自动状态显示、运行/停止状态显示、步数/计数值/程序显示、编辑程序,参数显示、输入/输出状态显示、CP脉冲和方向显示;●自动运行功能:可编辑,通过面板按键和加在端子的电平可控制自动运行的启动和停止等操作;●手动运行功能:可调整位置(手动的点动速度和点动步数可设定);●参数设定功能:可设定起跳频率、升降速曲线、反向间隙、手动长度、手动速度、中断跳转行号和回零速度;●程序编辑功能:可任意插入、删除可修改程序。
具有跳转行号、数据判零、语句条数超长和超短的判错功能;●回零点功能:可双向自动回到零点;●编程指令:共14条指令;外操作功能:通过参数设定和在A操作和B操作端子上加开关可执行外部中断操作;●工作电压:AC90~260V后面板图及信号说明:后面板接线端子。
包括:1.CP、CW、OPTO为步进电机驱动器控制线此三端分别连至驱动器的相应端,其中:CP:步进脉冲信号CW:电机转向电平信号OPTO:前两路信号的公共阳端CP、CW的状态分别对应面板上的指示灯。
2.RUN:启动程序自动运行,相当于面板上的启动键。
3.STOP:暂停正自动运行的程序,相当于面板的停止键。
再次启动后,程序继续运行。
4.A操作和B操作这是本控制器的一大特点:图2后面板图对于步进电机,我们一般进行定量定位控制,如控制电机以一定的速度运行一定的位移这种方式很容易解决,只需要把速度量和位移量编程即可。
步进电机控制器--说明书

步进电机,伺服电机可编程控制器KH-01使用说明一、系统特点●控制轴数:单轴;●指令特点:任意可编程(可实现各种复杂运行:定位控制和非定位控制);●最高输出频率:40KHz(特别适合控制细分驱动器);●输出频率分辨率:1Hz;●编程条数:99条;●输入点:6个(光电隔离);●输出点:3个(光电隔离);●一次连续位移范围:—7999999~7999999;●工作状态:自动运行状态,手动运行状态,程序编辑状态,参数设定状态;●升降速曲线:2条(最优化);●显示功能位数:8位数码管显示、手动/自动状态显示、运行/停止状态显示、步数/计数值/程序显示、编辑程序,参数显示、输入/输出状态显示、CP脉冲和方向显示;●自动运行功能:可编辑,通过面板按键和加在端子的电平可控制自动运行的启动和停止;●手动运行功能:可调整位置(手动的点动速度和点动步数可设定);●参数设定功能:可设定起跳频率、升降速曲线、反向间隙、手动长度、手动速度、中断跳转行号和回零速度;●程序编辑功能:可任意插入、删除可修改程序。
具有跳转行号、数据判零、语句条数超长和超短的判断功能;●回零点功能:可双向自动回到零点;●编程指令:共14条指令;●外操作功能:通过参数设定和编程,在(限位A)A操作和(限位B)B操作端子上加开关可执行外部中断操作;●电源:AC220V(电源误差不大于±15%)。
一、前面板图前面板图包括:1、八位数码管显示2、六路输入状态指示灯3、三路输出状态指示灯4、 CP脉冲信号指示灯5、 CW方向电平指示灯6、按键:共10个按键,且大部分按键为复合按键,他们在不同状态表示的功能不同,下面的说明中,我们只去取功能之一表示按键。
后面板图及信号说明:后面板图为接线端子,包括:1、方向、脉冲、+5V为步进电机驱动器控制线,此三端分别连至驱动器的相应端,其中:脉冲————步进脉冲信号方向————电机转向电平信号+5V————前两路信号的公共阳端CP、CW的状态分别对应面板上的指示灯2、启动:启动程序自动运行,相当于面板上的启动键。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电机控制器的说明书
电机控制器是一种电气设备,它主要用于控制电动机的起停、转向、调速和保护等功能。
本说明书将详细介绍电机控制器的使用、安装和
维护保养等方面的内容。
一、使用前须知
1. 本产品应由专业人员使用,如需安装、调试、维修和保养等操作,请确保操作人员具有相关资质、技能和经验。
2. 在运输和使用过程中,应严格按照使用说明书操作,避免因误
操作而造成设备损坏和人员伤害等事故发生。
3. 如需使用电机控制器进行控制,应先了解电机的工作原理和技
术要求,保证电机能正常运转。
二、产品特点
1. 本产品具有精准的控制性能,可满足不同电机的控制需求,如
转速、扭矩、电流等。
2. 本产品集成度高,功耗低,体积小巧,安装操作方便。
3. 本产品设计人性化,界面友好、操作简单。
三、操作说明
1. 接线:将电机控制器与电机之间的电缆连接好,确保接线牢固
可靠,线路接线正确。
2. 调试:在接线完成后,应根据需要设置控制参数,如转速、扭矩、电流等,通过控制器的操作面板进行设置,或通过电脑等外接设备进行调试。
3. 启停:在完成接线和参数调试后,可使用电机控制器进行启停操作,启动电机时应注意安全,如发现异常情况应立即停机检查。
4. 调速:电机控制器可实现电机的调速功能,可以根据需要进行转速调节,以满足生产、加工等的要求。
四、安装注意事项
1. 安装电机控制器应在通风良好、温度适宜的环境下进行。
2. 电机控制器应安装在防止扰动和电磁干扰的环境中,确保其正常工作。
3. 安装位置应考虑到电缆长度、通风、维护保养等方面的因素,应选择安装方便、操作、维护方便的地方。
4. 安装时应注意保护好电机控制器的触点和接线端子,防止其受到损坏或松动。
五、维护保养
1. 每隔一定时间应定期对电机控制器进行检查和维护,如清洁、紧固和调整等。
2. 如出现异常情况应及时排除,可根据使用说明进行故障排除,或联系售后维修部门进行处理。
3. 保养时应注意断电,防止电机控制器被误操作而导致故障。
六、注意事项
1. 本产品为高压电器,操作时应遵守相关规定,防止触电或电气火灾等事故发生。
2. 本产品为机电设备,使用和维护时应注意安全,避免因操作不当而造成人员和设备损伤。
3. 如需更换电机控制器配件,请使用原装件进行更换,避免使用不合适的配件造成设备故障。
七、售后服务
1. 本产品提供售后服务保障,如出现质量问题或使用故障,请及时联系售后服务部门,我们将在第一时间为您提供优质的售后服务。
2. 为了更好的维护您的设备,请保留好本说明书。
如果您需要进一步的咨询或帮助,请联系我们的售后服务部门,我们将尽快为您解决问题。
以上是本产品的说明书内容,希望能对您有所帮助。
如有疑问,请联系我们的售后服务部门。