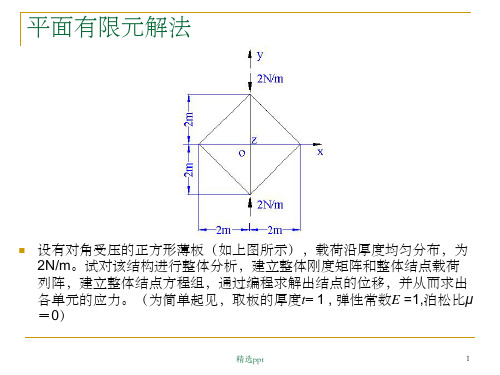
第三章平面问题的有限元法作业及答案
有限单元法课后习题全部答案_王勖成

∫
∂ 2φ ∂ 2φ ∂φ ∂φ k − ∫ k 2 + k 2 + Q δφ d Ω + ∫ δφ d Ω − ∫ αφ − q − k δφ d Γ Ω Γ − Γ Γ q q ∂y ∂n ∂n ∂x
欧拉方程: k
∂ 2φ ∂ 2φ + +Q = k 0 ∂x 2 ∂y 2
习题 1.2: 在用有限元法求解时,边界条件总是满足的,控制方程的不完全匹配,会产生误差。题中所 ,代入边 给出的近似函数: φ =a0 + a1 x + a2 x + a3 x ,应该满足边界条件,对于情况(1)
2 3
界条件可得 = a0 0, = a3
1 − a1 L − a2 L2 ,从而 L3 x3 x3 x3 2 ) + a ( x − ) + 2 L2 L L3
∫
= =
∑{ A
m k =1 m
T
( N j ( xk )) [ A( N i ( xk )ai ) − f ( xk )]
m
}
( N j )A( N i )ai − ∑ AT ( N j ) f = k 1= k 1
T
∑A
= Ka-P
(写成矩阵形式)
因此, kij =
d 2 w dw d 3 w 0 dx 2 δ dx − dx3 δ w = 0
L
1.5 如有一问题的泛函为 = Π ( w)
∫
L
0
EI d 2 w 2 kw2 + qwdx ,其中 E, I, k 是常数,q 2 + 2 dx 2
弹性力学平面问题的有限元法实例

分析与决策
(1)何种类型?
平面问题中的结构问题,且为静力问题;
平面问题中具有对称性,为减少[K],简化模型取
1/4;
简化后加约束,(1)在ox面上,位移u是对称的,
位移v是反对称的;在oy面上,位移u是反对称的, 位移v是对称的; (2)在ox面上,载荷对称,在oy 面上,载荷对称;
(1)何种类型?
4.5剖分面(续)
以垂线剖分面。依次单击preprocessor-modelingoperate-booleans-divide-area by line,弹出对话框, 选择对话框中的box单选,用窗口选择两个面元素, 后单击apply,在窗口中选L6-ok,完成面元素剖分。 单击plotctrls菜单中的numbering命令,关闭line numbers –ok; 单击plot菜单中的area命令,用面元素显示模型, 剖分的模型如图所示,由2个面变为4个面,面元素 的编号同时发生变化。
Preprocessor-material
props-material models-弹出define material model behavior 对话框-列表框material models available中, 依次单击structural-linear-elastic-isotropic, 添加弹性模量2.1e+11,泊松比0.3-ok;
操作过程
一、建立新文件
二、类型的选择 Structural-ok;
二、前处理
1、添加单元类型 选择:Quad 4node 42(单元库编号); 具有厚度:选择 option-plane str w/thk(平面应力有厚度);
2、设置实常数(Real constants)
有限元法课后习题答案
、有限元法将连续地求解域离散为若干个子域,得到有限个单元,单元和单元之间用节点连接、直梁在外力地作用下,横截面地内力有剪力和弯矩两个.、平面刚架结构在外力地作用下,横截面上地内力有轴力、剪力、弯矩 .、进行直梁有限元分析,平面刚架单元上每个节点地节点位移为挠度和转角、平面刚架有限元分析,节点位移有轴向位移、横向位移、转角.、在弹性和小变形下,节点力和节点位移关系是线性关系.、弹性力学问题地方程个数有个,未知量个数有个.、弹性力学平面问题方程个数有,未知数个.、几何方程是研究应变和位移之间关系地方程、物理方程是描述应力和应变关系地方程、平衡方程反映了应力和体力之间关系地、把经过物体内任意一点各个截面上地应力状况叫做一点地应力状态、形函数在单元上节点上地值,具有本点为.它点为零地性质,并且在三角形单元地任一节点上,三个行函数之和为个人收集整理勿做商业用途、形函数是三角形单元内部坐标地线性函数,他反映了单元地位移状态、在进行节点编号时,同一单元地相邻节点地号码差尽量小.、三角形单元地位移模式为线性位移模式、矩形单元地位移模式为双线性位移模式、在选择多项式位移模式地阶次时,要求所选地位移模式应该与局部坐标系地方位无关地性质为几何各向同性个人收集整理勿做商业用途、单元刚度矩阵描述了节点力和节点位移之间地关系、矩形单元边界上位移是连续变化地. 诉述有限元法地定义答:有限元法是近似求解一般连续场问题地数值方法. 有限元法地基本思想是什么答:首先,将表示结构地连续离散为若干个子域,单元之间通过其边界上地节点连接成组合体.其次,用每个单元内所假设地近似函数分片地表示求解域内待求地未知厂变量.个人收集整理勿做商业用途. 有限元法地分类和基本步骤有哪些答:分类:位移法、力法、混合法;步骤:结构地离散化,单元分析,单元集成,引入约束条件,求解线性方程组,得出节点位移.个人收集整理勿做商业用途. 有限元法有哪些优缺点答:优点:有限元法可以模拟各种几何形状复杂地结构,得出其近似解;通过计算机程序,可以广泛地应用于各种场合;可以从其他软件中导入建好地模型;数学处理比较方便,对复杂形状地结构也能适用;有限元法和优化设计方法相结合,以便发挥各自地优点.个人收集整理勿做商业用途缺点:有限元计算,尤其是复杂问题地分析计算,所耗费地计算时间、内存和磁盘空间等计算资源是相当惊人地.对无限求解域问题没有较好地处理办法.尽管现有地有限元软件多数使用了网络自适应技术,但在具体应用时,采用什么类型地单元、多大地网络密度等都要完全依赖适用者地经验.个人收集整理勿做商业用途. 梁单元和平面钢架结构单元地自由度由什么确定答:由每个节点位移分量地总和确定. 简述单元刚度矩阵地性质和矩阵元素地物理意义答:单元刚度矩阵是描述单元节点力和节点位移之间关系地矩阵单元刚度矩阵中元素地物理意义为单元第个节点位移分量等于,其他节点位移分量等于时,对应地第个节点力分量.个人收集整理勿做商业用途. 有限元法基本方程中地每一项地意义是什么答:——整个结构地节点载荷列阵(外载荷、约束力);整个结构地节点位移列阵;结构地整体刚度矩阵,又称总刚度矩阵.个人收集整理勿做商业用途. 位移边界条件和载荷边界条件地意义是什么答:由于刚度矩阵地线性相关性不能得到解,引入边界条件,使整体刚度矩阵求地唯一解. . 简述整体刚度矩阵地性质和特点答:对称性;奇异性;稀疏性;对角线上地元素恒为正.简述整体坐标地概念答:在整体结构上建立地坐标系叫做整体坐标,又叫做统一坐标系.. 简述平面钢架问题有限元法地基本过程答:)力学模型地确定,)结构地离散化,)计算载荷地等效节点力,)计算各单元地刚度矩阵,)组集整体刚度矩阵,)施加边界约束条件,)求解降价地有限元基本方程,)求解单元应力,)计算结果地输出.个人收集整理勿做商业用途. 弹性力学地基本假设是什么.答:连续性假定,弹性假定,均匀性和各向同性假定,小变形假定,无初应力假定..弹性力学和材料力学相比,其研究方法和对象有什么不同.答:研究对象:材料力学主要研究杆件,如柱体、梁和轴,在拉压、剪切、弯曲和扭转等作用下地应力、形变和位移.弹性力学研究各种形状地弹性体,除杆件外,还研究平面体、空间体,板和壳等.因此,弹性力学地研究对象要广泛得多.研究方法:弹性力学和材料力学既有相似之外,又有一定区别.弹性力学研究问题,在弹性体区域内必须严格考虑静力学、几何学和物理学三方面条件,在边界上严格考虑受力条件或约束条件,由此建立微分方程和边界条件进行求解,得出较精确地解答.而材料力学虽然也考个人收集整理勿做商业用途虑这几方面地条件,但不是十分严格地,材料力学只研究和适用于杆件问题.. 简述圣维南原理.答;把物体一小部分上地面力变换为分布不同但静力等效地面力,但影响近处地应力分量,而不影响远处地应力.“局部影响原理”个人收集整理勿做商业用途.平面应力问题和平面应变问题地特点和区别各是什么?试各举出一个典型平面应力和平面应变地问题地实例.个人收集整理勿做商业用途答:平面应力问题地特点:长、宽尺寸远大于厚度,沿板面受有平行板地面力,且沿厚度均匀分布,体力平行于板面且不沿厚度变化,在平板地前后表面上无外力作用平面应变问题地特点:向尺寸远大于、向尺寸,且与轴垂直地各个横截面尺寸都相同,受有平行于横截面且不沿向变化地外载荷,约束条件沿向也不变,即所有内在因素地外来作用都不沿长度变化.区别:平面应力问题中方向上应力为零,平面应变问题中方向上应变为零、应力不为零.举例:平面应力问题等厚度薄板状弹性体,受力方向沿板面方向,荷载不沿板地厚度方向变化,且板地表面无荷载作用. 平面应变问题——水坝用于很长地等截面四柱体,其上作用地载荷均平行于横截面,且沿柱长方向不变法.个人收集整理勿做商业用途. 三角形常应变单元地特点是什么?矩形单元地特点是什么?写出它们地位移模式.答:三角形单元具有适应性强地优点,较容易进行网络划分和逼近边界形状,应用比较灵活.其缺点是它地位移模式是线性函数,单元应力和应变都是常数,精度不够理想.个人收集整理勿做商业用途矩形单元地位移模式是双线性函数,单元地应力、应变式线性变化地,具有精度较高,形状规整,便于实现计算机自动划分等优点,缺点是单元不能适应曲线边界和斜边界,也不能随意改变大小,适用性非常有限.个人收集整理勿做商业用途. 写出单元刚度矩阵表达式、并说明单元刚度与哪些因素有关.答:单元刚度矩阵与节点力坐标变换矩阵,局部坐标系下地单元刚度矩阵,节点位移有关地坐标变换矩阵.. 如何由单元刚度矩阵组建整体刚度矩阵(叠加法)?答:()把单元刚度矩阵扩展成单元贡献矩阵,把单元刚度矩阵中地子块按其在整体刚度矩阵中地位置排列,空白处用零子块填充.()把单元地贡献矩阵地对应列地子块相叠加,即可得出整体刚度矩阵.个人收集整理勿做商业用途. 整体刚度矩阵地性质.答:()整体刚度矩阵中每一列元素地物理意义为:欲使弹性体地某一节点沿坐标方形发生单位为移,而其他节点都保持为零地变形状态,在各节点上所需要施加地节点力;()整体刚度矩阵中地主对角元素总是正地;()整体刚度矩阵是一个对称阵;()整体刚度矩阵式一个呈带状分布地稀疏性矩阵.()整体刚度矩阵式一个奇异阵,在排除刚体位移后,他是正定阵.个人收集整理勿做商业用途. 简述形函数地概念和性质.答:形函数地性质有:()形函数单元节点上地值,具有“本点为一、他点为零”地性质;()在单元地任一节点上,三角函数之和等于;()三角形单元任一一条边上地形函数,仅与该端点节点坐标有关,而与另外一个节点坐标无关;()型函数地值在之间变换.个人收集整理勿做商业用途. 结构地网格划分应注意哪些问题.如何对其进行节点编号.才能使半带宽最小.,相邻节点地号码差最小个人收集整理勿做商业用途答:一般首选三角形单元或等参元.对平直边界可选用矩形单元,也可以同时选用两种或两种以上地单元.一般来说,集中力,集中力偶,分布在和强度地突变点,分布载荷与自由边界地分界点,支撑点都应该取为节点,相邻节点地号码差尽可能最小才能使半带宽最小个人收集整理勿做商业用途. 为了保证解答地收敛性,单元位数模式必须满足什么条件?答:()位移模式必须包含单元刚体位移;()位移模式必须包含单元地常应变;()位移模式在单元内要连续,且唯一在相邻单元之间要协调.在有限单元法中,把能够满足条件和条件地单元称为完备单元,把满足条件地单元叫做协调单元或保续单元.个人收集整理勿做商业用途有限元分析求得地位移解收敛于真实解得下界地条件.答:.位移模式必须包含单元地刚体位移,.位移模式必须包含单元地常应变,.位移模式在单元内要连续,且位移在相邻单元之间要协调.个人收集整理勿做商业用途. 简述等参数单元地概念.答:坐标变换中采用节点参数地个数等于位移模式中节点参数地个数,这种单元称为等参单元.. 有限元法中等参数单元地主要优点是什么?答:)应用范围广.在平面或空间连续体,杆系结构和板壳问题中都可应用.)将不规则地单元变化为规则地单元后,易于构造位移模式.)在原结构中可以采用不规则单元,易于适用边界地形状和改变单元地大小.)可以灵活地增减节点,容易构造各种过度单元.)推导过程具有通用性.一维,二维三维地推导过程基本相同.. 简述四节点四边形等参数单元地平面问题分析过程.答:()通过整体坐标系和局部坐标系地映射关系得到四节点四边形等参单元地母单元,并选取单元地唯一模式;()通过坐标变换和等参元确定平面四节点四边形等参数单元地几何形状和位移模式;()将四节点四边形等参数单元地位移模式代入平面问题地几何方程,得到单元应变分量地计算式,再将单元应变代入平面问题地物理方程,得到平面四节点等参数单元地应力矩阵()用虚功原理球地单元刚度矩个人收集整理勿做商业用途阵,,最后用高斯积分法计算完成.. 为什么等参数单元要采用自然坐标来表示形函数?为什么要引入雅可比矩阵?答:简化计算得到形函数地偏导关系..软件主要包括哪些部分?各部分地作用是什么?答:.前处理模块:提供了一个强大地实体建模及网络划分工具,用户可以方便地构造有限元模型..分析计算模块:包括结构分析、流体力学分析、磁场分析、声场分析、压电分析以及多种物理场地耦合分析,可以模拟多种物理介质地相互作用,具有灵敏度分析及优化分析能力..后处理模块:可将计算后果以彩色等值线显示、梯度显示、矢量显示、粒子流迹显示、立体切片显示、透明及半透明显示等图形方式显示出来,也可将计算结果以图表、曲线形式显示出来或输出.个人收集整理勿做商业用途.软件提供地分析类型有哪些?答:结构静力分析、机构动力分析、结构非线性分析、动力学分析、热分析、流体力学分析、电磁场分析、声场分析、压电分析.个人收集整理勿做商业用途.简述软件分析静力学问题地基本流程.答:.前处理器:)定义单元类型,)定义实常数,)定义材料属性,)创建实体几何模型,)划分网络;个人收集整理勿做商业用途.求解器:)定义分析类型,)施加载荷和位移约束条件,)求解;三角形三节点单元地位移是连续地,应变和应力在单元内是常数,因而其相邻单元将具有不同地应力和应变,即在单元地公共边界上和应变地值将会有突变.个人收集整理勿做商业用途矩形单元地边界上,位移是线性变化地,显然,在两个相邻矩形单元地公共边界上,其位移是连续地.节点地选用原则:一般说,集中力、集中力偶、分布载荷强度地突变点、分布载荷与自由边界地分界点、支承点都能赢取为节点.个人收集整理勿做商业用途单元地划分原则:()划分单元地数目,视要求地计算精度和计算机地性能而定.()单元地大小,可根据部位地不同而有所不同.个人收集整理勿做商业用途试述街节点力和节点载荷地区别.节点力是单元与节点之间地作用力;如果取整个结构为研究对象,节点力为内力,节点载荷是作用在节点上地外载荷. 个人收集整理勿做商业用途试述求整体刚度矩阵地两种方法.分别建立各节点地平衡方程式,写成矩阵形式,可求得整体刚度矩阵;将各单元刚度矩阵按规律叠加,也可得整体刚度矩阵. 个人收集整理勿做商业用途平面问题中划分单元地数目是否越多越好?不是越多越好.划分单元地数目,视要求地计算精度和计算机地性能而定.随着单元数目地接连多,有限元解逐步逼近于真实解,但是,单元数目接连加,刚求解地有限元线性方程组地数目接连多,需要占用更多地计算机内存资源,求解时间接连长,所以,在计算机上进行有限元分析时,还要考虑计算机地性能.单元数过多并不经济.个人收集整理勿做商业用途、写出单元刚度矩阵地表达式,并说明单元刚度与那些因素有关?[]单元应变矩阵,[]弹性矩阵,厚度)单元刚度矩阵取决于单元地大小、方向、和弹性常数,而与单元地位置无关,即不随单元或坐标轴地平移而改变.个人收集整理勿做商业用途、选择多项式为单元地位移模式时,除了要满足单元地完备性和协调性要求,还须考虑什么因素?还须考虑两个因素:、所选地位移模式应该与局部坐标系地方位无关,即几何各向同性.、多项式位移模式中地项数必须等于或稍大于单元边界上地外节点地自由度数,通常取多项式地项数与单元地外节点地自由度数想等.个人收集整理勿做商业用途。
有限元分析——平面问题
Re=
NT
s
Pstds
江西五十铃发动机有限公司
技术中心 12 /33
4、整体分析 整体刚度矩阵 整体刚度矩阵组装的基本步骤:
先求出各个单元的单元刚度矩阵; 将单元刚度矩阵中的每个子块放在整体刚度矩阵中的对应位置上,得到单 元的扩大刚度矩阵; 将全部单元的扩大矩阵相加得到整体刚度矩阵。
不失一般性,仅考虑模型中有四个单元,如图所示,四个单元的整体节点位 移列阵为
τZX z= + t/2 =0
因板很薄,载荷又不沿厚度变化,应力沿板 的厚度方向是连续分布的,可以认为,在整
Z
个板内各点都有
σZ=0 τYZ=0 τZX=0
O
tX
图1 平面应力问题
根据剪应力的互等性、物理方程,可得描述平面应力问题的八个独立的基本变量 为
江西五十铃发动机有限公司
技术中心 4 /33
σ=[σX σY τXY]T ε=[εX εY γXY]T
x2 y2 ɑ1= x 3 y 3
1 y2 b1=- 1 y 3
1 c1= 1
x2 x3
(1,2,3)
上式表示下标轮换,即1 2,2 3,3 1同时更换。
江西五十铃发动机有限公司
技术中心 9 /33
重写位移函数,并以节点位移的形式进行表达,有
uv((xx,,yy))N(x,y)qe
其中形函数矩阵为
Y
江西五十铃发动机有限公司
图2 平面应变问题
技术中心 5 /33
根据几何方程、物理方程可得,描述平面应变问题的独立变量也是八个,且与 平面应力问题的一样。只是弹性矩阵变为
1
D=
E1
1 1 2 1
1
平面有限元法作业
连,这两个公共节点有共同的节点位移值,从而保证了两个相邻单元在其公共边界上位移的 连续性。故四节点矩形单元满足位移连续性条件。#
{ } 3-7:求以下受力单元的等效节点载荷 R 。已知:lij、lim、lmj 、
⎢⎣ 0 0 0
0 0.5 0
0
0 − 0.5 − 0.5 0 0.5 ⎥⎦12×12
利用矩阵的运算关系
[ ] [ ] [k]T =
B]T [D][B]tA T
= [B]T [D]T
[B]T
T
tA
由于 [D]是对称矩阵, [D]T = [D]
所以 [k]T = [B]T [D] [B]tA = [k],即 [k]为对称矩阵。#
3-5:图示平面等腰三角形单元,若 μ = 0.3 ,弹性模量为 E,厚度为 t,求形函数矩阵 [N ]、 应变矩阵 [B] 及单元刚度矩阵 [K ]。(补充题意:平面应力情况)
q、P,厚度 t,P 点作用在 jm 中点处,沿 x 方向,三角形分布 载荷垂直于 ij 边。
4
解:q 的单元 N/m2 ,设厚度为 t,如图示
Xi
=
−
1 3
qlij
t
cos
30°
=
−
3 6
qlij
t
Yi
=
−
1 3
qlij
t
sin
30°
=
−
1 6
qlij
t
等效节点载荷
X
j
=
−
1 6
qlijt cos30° +
第三章作业
有限元习题及答案
有限元习题及答案有限元习题及答案有限元方法是一种常用的数值计算方法,用于求解各种工程和科学问题。
在学习有限元方法的过程中,练习习题是非常重要的,可以帮助学生巩固所学的知识,并提高解决实际问题的能力。
本文将介绍一些有限元习题及其答案,希望对学习有限元方法的同学有所帮助。
习题一:一维热传导问题考虑一个长度为L的一维杆,其两端固定,杆上的温度满足以下热传导方程:∂²T/∂x² = 0,其中T为温度,x为位置。
已知杆的两端温度分别为T1和T2,求解杆上的温度分布。
解答一:根据热传导方程,可以得到温度分布的一般解为T(x) = Ax + B,其中A和B为常数。
根据边界条件,可以得到方程组:T(0) = B = T1T(L) = AL + B = T2解方程组可得A = (T2 - T1) / L,B = T1。
因此,温度分布为T(x) = ((T2 - T1) / L) * x + T1。
习题二:二维弹性问题考虑一个矩形薄板,其长为L,宽为W,材料的弹性模量为E,泊松比为ν。
已知薄板的边界上施加了一定的边界条件,求解薄板上的位移场。
解答二:对于二维弹性问题,可以使用平面应力假设,即假设薄板内部的应力只有两个分量σx和σy,并且与z轴无关。
根据平面应力假设和胡克定律,可以得到位移场的偏微分方程:∂²u/∂x² + ν * (∂²u/∂y²) + (1 - ν) * (∂²v/∂x∂y) = 0∂²v/∂y² + ν * (∂²v/∂x²) + (1 - ν) * (∂²u/∂x∂y) = 0其中u和v分别为位移场在x和y方向上的分量。
边界条件根据具体情况给定。
通过数值方法,如有限元方法,可以求解位移场的近似解。
习题三:三维流体力学问题考虑一个三维流体力学问题,流体在一个封闭容器内流动,容器的形状为一个长方体,已知流体的速度场和压力场的初始条件,求解流体的运动状态。
有限元法理论及应用参考答案(推荐文档)
有限元法理论及应用大作业1、试简要阐述有限元理论分析的基本步骤主要有哪些?答:有限元分析的主要步骤主要有:(1)结构的离散化,即单元的划分;(2)单元分析,包括选择位移模式、根据几何方程建立应变与位移的关系、根据虚功原理建立节点力与节点位移的关系,最后得到单元刚度方程;(3)等效节点载荷计算;(4)整体分析,建立整体刚度方程;(5)引入约束,求解整体平衡方程。
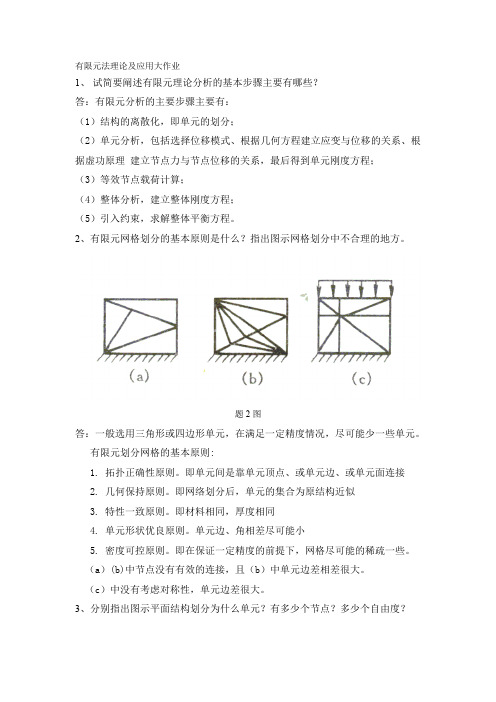
2、有限元网格划分的基本原则是什么?指出图示网格划分中不合理的地方。
题2图答:一般选用三角形或四边形单元,在满足一定精度情况,尽可能少一些单元。
有限元划分网格的基本原则:1.拓扑正确性原则。
即单元间是靠单元顶点、或单元边、或单元面连接2.几何保持原则。
即网络划分后,单元的集合为原结构近似3.特性一致原则。
即材料相同,厚度相同4.单元形状优良原则。
单元边、角相差尽可能小5.密度可控原则。
即在保证一定精度的前提下,网格尽可能的稀疏一些。
(a)(b)中节点没有有效的连接,且(b)中单元边差相差很大。
(c)中没有考虑对称性,单元边差很大。
3、分别指出图示平面结构划分为什么单元?有多少个节点?多少个自由度?题3图答:(a )划分为杆单元, 8个节点,12个自由度。
(b )划分为平面梁单元,8个节点,15个自由度。
(c )平面四节点四边形单元,8个节点,13个自由度。
(d )平面三角形单元,29个节点,38个自由度。
4、什么是等参数单元?。
答:如果坐标变换和位移插值采用相同的节点,并且单元的形状变换函数与位移插值的形函数一样,则称这种变换为等参变换,这样的单元称为等参单元。
5、在平面三节点三角形单元中,能否选取如下的位移模式,为什么?(1).⎪⎩⎪⎨⎧++=++=26543221),(),(y x y x v yx y x u αααααα (2). ⎪⎩⎪⎨⎧++=++=2652423221),(),(yxy x y x v yxy x y x u αααααα 答:(1)不能,因为位移函数要满足几何各向同性,即单元的位移分布不应与人为选取的 坐标方位有关,即位移函数中的坐标x,y 应该是能够互换的。
第三章平面问题的有限元法作业及答案

第三章 平面问题的有限元法作业1. 图示一个等腰三角形单元及其节点编码情况,设μ=0,单元厚度为t 。
求 1)形函数矩阵[]N ;2)应变矩阵[]B ;3)应力矩阵[]S 。
4第1题图 第2题图2. 如题图所示,结构为边长等于a 的正方形,已知其节点位移分别为:11(,)u v 、22(,)u v 、33(,)u v 、44(,)u v 。
试求A 、B 、C 三点的位移。
其中A 为正方形形心,B 为三角形形心。
3.直角边边长为l 的三角形单元,如题图所示。
试计算单元等效节点载荷列阵(单元厚度为t ,不计自重)。
第3题图 第4题图4. 如题图所示,各单元均为直角边边长等于l 的直角三角形。
试计算(1)单元等效节点载荷列阵;(2)整体等效节点载荷列阵。
已知单元厚度为t ,不计自重。
5.下列3个有限元模型网格,哪种节点编号更合理?为什么?934679121134612142(a) (b) (c)第5题图6.将图示结构画出有限元模型;标出单元号和节点号;给出位移边界条件;并计算半带宽(结构厚度为t )。
2a(a) (b) 无限长圆筒 (c) 第6题图7. 结构如图所示,已知结构材料常数E 和 ,单元厚度为t 。
利用结构的对称性,采用一个单元,分别计算节点位移和单元应力。
第7题图答案:1. 1)形函数i x N a =, j y N a = , 1m x y N a a=-- 2)应变矩阵[]1000101000101011011B a -⎡⎤⎢⎥=-⎢⎥--⎢⎥⎣⎦3)应力矩阵[]10001010001011111002222S a ⎡⎤⎢⎥-⎢⎥=-⎢⎥⎢⎥--⎢⎥⎣⎦2. A 点的位移为()2312A u u u =+ , ()2312A v v v =+ B 点的位移为()24313B u u u u =++ , ()24313B v v v v =++ C 点的位移为()1223C a u u u =+ , ()C 1223av v v =+ 3. 单元等效节点载荷列阵为{}111100003663Tei ji jR q q q q ⎡⎤=++⎢⎥⎣⎦4. (2)整体等效节点载荷向量为{}111100006322TR qlt P qlt P P qlt qlt ⎡⎤=-⎢⎥⎣⎦7. (1) 减缩后的整体刚度方程22122122222221110222021102(1)22102x x b b ab R b ab b P v Etab a bab ab R v b a μμμμμμμμμ---⎡⎤--⎢⎥⎧⎫⎧⎫⎢⎥⎪⎪--⎪⎪⎢⎥⎪⎪-⎪⎪⎢⎥=⎨⎬⎨⎬---++⎢⎥⎪⎪⎪⎪⎢⎥⎪⎪⎪⎪⎩⎭-⎢⎥⎩⎭+⎢⎥⎣⎦ 节点位移22(1)Pb v Eatμ+=- , 2212212b a v v bμ-+=单元应力为{}()2122201012bv E bv bv ab av μσμμ⎛⎫⎧⎫ ⎪⎪⎪-⎧⎫ ⎪⎪⎪⎪⎪=+-⎨⎬⎨⎬ ⎪-⎪⎪⎪⎪ ⎪-⎩⎭⎪⎪-⎪⎩⎭⎝⎭。
有限元法基础习题答案
有限元法基础习题答案有限元法是一种常用的工程分析方法,广泛应用于结构力学、热传导、流体力学等领域。
它通过将复杂的物理问题离散化为一系列简单的子问题,并利用数值方法求解这些子问题,从而得到整体问题的近似解。
在学习有限元法的过程中,习题是必不可少的一环。
本文将给出一些有限元法基础习题的答案,希望能够帮助读者更好地理解和掌握这一方法。
习题一:一维线性弹性力学问题考虑一根长度为L的弹性杆,杆的截面积为A,杨氏模量为E。
在杆的一端施加一个沿杆轴向的拉力F,另一端固定。
假设杆轴向变形u(x)满足以下方程:EAu''(x) = -F,0 < x < Lu(0) = 0, u(L) = 0其中,u''(x)表示u(x)对x的二阶导数。
解答:根据上述方程,我们可以得到杆的位移函数u(x)的表达式。
首先,对方程两边进行积分,得到:EAu'(x) = -Fx + C1其中,C1为积分常数。
再次对方程两边进行积分,得到:EAu(x) = -F/2*x^2 + C1*x + C2其中,C2为积分常数。
根据边界条件u(0) = 0,可得C2 = 0。
代入边界条件u(L) = 0,可得:EAu(L) = -F/2*L^2 + C1*L = 0由此可得C1 = F/2*L。
将C1代入上式,可得:EAu(x) = -F/2*x^2 + F/2*L*x最终得到杆的位移函数u(x)的表达式为:u(x) = (-F/2*E)*(x^2 - L*x),0 < x < L习题二:二维平面弹性力学问题考虑一个正方形薄板,边长为L,板的厚度为h。
假设薄板的杨氏模量为E,泊松比为ν。
在薄板的一侧施加一个沿法向的均匀表面压力P,另一侧固定。
求薄板的位移和应力分布。
解答:根据平面弹性力学理论,我们可以得到薄板的位移和应力分布。
首先,根据杨氏模量E、泊松比ν和薄板的厚度h,可以计算出薄板的弹性模量D:D = E*h^3 / (12*(1-ν^2))接下来,根据薄板的边界条件和平衡方程,可以得到薄板的位移和应力分布。
有限元试题及答案
有限元试题及答案一、选择题1. 有限元法是一种数值方法,主要用于求解什么类型的数学问题?A. 线性代数方程B. 微分方程C. 积分方程D. 偏微分方程答案:D2. 在有限元分析中,以下哪项不是网格划分的基本原则?A. 网格应尽量均匀B. 网格应避免交叉C. 网格应尽量小D. 网格应适应几何形状答案:C3. 有限元方法中,单元的局部刚度矩阵可以通过以下哪种方式获得?A. 直接积分B. 矩阵乘法C. 线性插值D. 经验公式答案:A二、填空题1. 有限元方法中,______ 是指将连续的域离散化成有限数量的小单元。
答案:离散化2. 在进行有限元分析时,______ 是指在单元内部使用插值函数来近似求解场变量。
答案:近似3. 有限元法中,______ 是指在单元边界上满足的连续性条件。
答案:边界条件三、简答题1. 简述有限元法的基本步骤。
答案:有限元法的基本步骤包括:(1)定义问题域;(2)离散化问题域,生成网格;(3)为每个单元定义局部坐标系和形状函数;(4)组装全局刚度矩阵和载荷向量;(5)施加边界条件;(6)求解线性代数方程;(7)提取结果并进行后处理。
2. 描述有限元分析中的单元类型有哪些,并简述每种单元的特点。
答案:常见的单元类型包括:(1)一维单元,如杆单元和梁单元,特点是沿一个方向传递力;(2)二维单元,如三角形和四边形单元,特点是在平面内传递力;(3)三维单元,如四面体和六面体单元,特点是在空间内传递力。
每种单元都有其特定的形状函数和刚度矩阵。
四、计算题1. 给定一个简单的一维弹性杆问题,其长度为L,两端固定,中间施加集中力P。
使用有限元法求解该杆的位移和应力分布。
答案:首先,将杆离散化为一个单元。
使用一维杆单元的局部刚度矩阵和形状函数,可以推导出全局刚度矩阵。
然后,施加边界条件,即杆的两端位移为零。
最后,将集中力P转换为等效节点载荷,求解线性代数方程,得到节点位移。
应力可以通过位移和杆的截面特性计算得出。
有限元课后第三章习题答案
有限元课后第三章习题答案有限元课后第三章习题答案第一题:根据题目给出的信息,我们可以得出以下结论:1. 题目中提到了一个平面问题,即只考虑二维情况。
2. 材料的弹性模量为E = 210 GPa。
3. 材料的泊松比为ν = 0.3。
4. 材料的厚度为t = 10 mm。
5. 材料的长度为L = 100 mm。
6. 材料的宽度为W = 50 mm。
7. 材料的边界条件为固定边界。
根据以上信息,我们可以开始解题。
首先,我们需要确定有限元模型的几何形状和单元类型。
由于题目给出的是一个平面问题,我们可以选择使用二维平面应力单元来建模。
根据题目给出的材料尺寸,我们可以选择一个矩形区域作为有限元模型的几何形状。
接下来,我们需要确定有限元模型的单元划分。
由于题目没有给出具体的单元划分要求,我们可以根据经验选择适当的单元尺寸和划分密度。
在这里,我们可以将矩形区域划分为若干个等大小的四边形单元。
然后,我们需要确定有限元模型的边界条件。
根据题目给出的信息,材料的边界条件为固定边界。
这意味着模型的边界上的节点在计算过程中将保持固定位置,不发生位移。
因此,我们需要将边界上的节点固定。
接下来,我们可以开始进行有限元计算。
首先,我们需要确定有限元模型的节点和单元编号。
然后,我们可以根据材料的弹性模量和泊松比,以及节点和单元的位置信息,计算出每个节点和单元的刚度矩阵。
然后,我们可以根据边界条件,将固定边界上的节点的位移设置为0。
这样,我们就可以得到一个由位移未知数构成的线性方程组。
通过求解这个线性方程组,我们可以得到模型中每个节点的位移。
最后,我们可以根据节点的位移和单元的刚度矩阵,计算出每个单元的应力和应变。
根据题目给出的材料厚度,我们可以得到每个单元的应力和应变的平均值。
综上所述,根据题目给出的信息,我们可以使用有限元方法来求解这个平面问题。
通过建立有限元模型,确定边界条件,进行有限元计算,我们可以得到模型中每个节点的位移和每个单元的应力和应变。
有限元复习题及答案
1.两种平面问题的根本概念和根本方程;答:弹性体在满足一定条件时,其变形和应力的分布规律可以用在某一平面内的变形和应力的分布规律来代替,这类问题称为平面问题。
平面问题分为平面应力问题和平面应变问题。
平面应力问题设有张很薄的等厚薄板,只在板边上受到平行于板面并且不沿厚度变化的面力,体力也平行于板面且不沿厚度变化。
由于平板很薄,外力不沿厚度变化,因此在整块板上有:,,剩下平行于XY面的三个应力分量未知。
平面应变问题设有很长的柱体,支承情况不沿长度变化,在柱面上受到平行于横截面而且不沿长度变化的面力,体力也如此分布。
平面问题的根本方程为:平衡方程几何方程物理方程〔弹性力学平面问题的物理方程由广义虎克定律得到〕•平面应力问题的物理方程平面应力问题有•平面应变问题的物理方程平面应变问题有在平面应力问题的物理方程中,将E替换为、替换为,可以得到平面应变问题的物理方程;在平面应变问题的物理方程中,将E替换为、替换为,可以得到平面应力问题的物理方程。
2弹性力学中的根本物理量和根本方程;答:根本物理量有:空间弹性力学问题共有15个方程,3个平衡方程,6个几何方程,6个物理方程。
其中包括6个应力分量,6个应变分量,3个位移分量。
平面问题共8个方程,2个平衡方程,3个几何方程,3个物理方程,相应3个应力分量,3个应变分量,2个位移分量。
根本方程有:1.平衡方程及应力边界条件:平衡方程:边界条件:2.几何方程及位移边界条件:几何方程:边界条件:3.物理方程:3.有限元中使用的虚功方程。
对于刚体,作用在其上的平衡力系在任意虚位移上的总虚功为0,这就是刚体的平衡条件,或者称为刚体的虚功方程。
对于弹性变形体,其虚位移原理为:在外力作用下处于平衡的弹性体,当给予物体微小的虚位移时,外力的总虚功等于物体的总虚应变能。
设想一处于平衡状态的弹性体发生了任意的虚位移,相应的虚应变为,作用在微元体上的平衡力系有〔X,Y,Z〕和面力。
外力的总虚功为实际的体力和面力在虚位移上所做的功,即:在物体产生微小虚变形过程中,整个弹性体内应力在虚应变上所做的功为总虚应变能,即:其中为弹性体单位体积内的应力在相应的虚应变上做的虚功,由此得到虚功方程:4.节点位移,单元位移及它们的关系。
有限元作业——精选推荐
有限元作业等参单元的原理及应⽤摘要:在平⾯问题的有限元法中,最简单因⽽最常⽤的是具有三个节点的简单三⾓形单元,其次是具有四个节点的矩形单元。
矩形单元能较好地反映实际盈利的变化情况,但是矩形单元不鞥适应曲线边界和⾮正交的直线边界,也不能随便改变其⼤⼩,如果改⽤任意四边形单元,则在相邻两单元的公共边界上,位移将不是相性变化,公共边上位移的连续性将得不到保证。
利⽤等参变换,则可以解决这个⽭盾。
关键字:等参单元;有限元⽅法;Newton-Cotes 积分;刚度矩阵;1概述部分:1.1等参单元的概念及其原理所谓的等餐变换是指单元的位移模式与坐标变换表达式中具有完全相同的插值函数的变换。
采⽤等参变换的单元即称为等参单元。
对于如图1.1(a )所⽰的任意四边形单元,参照前⾯源于矩形单元的位移模式,可以取+++=+++=4433221144332211νννννN N N N u N u N u N u N u (1-1)图1.1 等参单元⽽其中的形函数为:()()1114i i i N ξξηη=++ (1-2)式中:ζ、η为该四边形单元的局部坐标,ζi 、ηi 为四个⾓节点的局部坐标值,其值为:(1-3)由公式(1-1)、(1-2)可以看出,该位移模式在四个节点处给出节点位移。
⽽且,在单元的死边上,位移是线性变化的,从⽽保证了位移的连续性,因此,式(1-1)、(1-2)就是所需的正确的位移模式。
同时,如果效仿位移模式式(1-1)、(1-2),把坐标变换式取为:+++=+++=4433221144332211x N x N x N x N y x N x N x N x N x (1-4)也显然可见,该变换式在四个节点处给出节点的整体坐标;⽽且,在单元的四边上,⼀个局部坐标等于±1,⽽另⼀个局部坐标是线性变化的,从⽽课件,整体坐标也是线性变化的。
因此,式(1-4)就是所需的正确的坐标变换式。
在这⾥,图1-1(b )中的正⽅形单元称为基本单元或母单元,⽽图1-1(a )中的任意四边形单元,是由该基本单元通过变换⽽得来的实际单元。
平面问题有限元例题
0 0 0 1 1 0 2 0 0 0 2 0 0 00 0 0 0 0 00 0 0 0
1
3 0
0
4
0
0 0 0 0 1 0 0 0 3 0 0 0 0 1 2 0 0 1
1 2 1 5 3 0 1
0 0 0 0 0 0 0 0 0 1
0 0 0 2 0 2 0 0 0 1 1 0
0
1
6
E 4
0 0
0 0
0 1
0 0
00 00
0 3
0 0 1 2 0 0 1
0 0 0 0 0 3
0 0 0 0 0 1 2 1 0 0
4 3 0 1 0 0
0 0 0 0 0 0 2 0 2 0 0 0 5 0 0 1 0 0 0 1 1 0 1 0 0
0 0 0 0 0 0
0 00 0 0 00 0
0 1
0 0
0 0
0 0
2 0 1 1
2
0
0 返1回Βιβλιοθήκη 6所以结构总方程为:
R K
其中
R 0 P 0 0 0 0 0 0 0 0 0 0T
u1 v1 u2 v2 u3 v3 u4 v4 u5 v5 u6 v6 T
考虑到边界条件:
u1 u2 u3 v4 v5 v6 0
返回
用对角元乘大数法消除奇异性后的结构总体方程为:
0
1
1
0
1 1
i
k 3
E 4
0 0
1 0
1 0
0 2
1 1 0 2
j
2 1 1 0 3 1
m
0 1 1 2 1 3
各单元的节点编号与总体结构的总编号之间的对应关 系见表3-2。
弹性力学平面问题的有限元法

用于描述四节点四边形单元内任意一点的位移和 应力状态。
刚度矩阵
由四节点四边形单元的形状函数和弹性力学基本 公式构建,用于描述单元的刚度特性。
平面六面体八节点单元
六面体八节点单元
是一种三维有限元单元, 具有六个面和八个节点。
形状函数
用于描述六面体八节点 单元内任意一点的位移 和应力状态。
刚度矩阵
对复杂问题的处理能力有限
对于一些高度非线性或耦合问题,有限元法可能难以获得准确解,需要采用其他数值方法 或实验手段。
对高维问题的处理难度较大
随着问题维度的增加,有限元法的计算量和内存消耗会急剧增加,限制了其在高维问题中 的应用。
未来发展方向与挑战
高效算法设计
研究更高效的有限元算法,提高计算速度和精度,降低计算成本。
载荷向量的确定
根据边界条件和外力分布,确定每个节点的载荷 向量。
3
系统刚度矩阵与总载荷向量
将各个单元的刚度矩阵和载荷向量组合起来,形 成系统刚度矩阵和总载荷向量。
求解线性方程组
线性方程组的求解
利用数值方法(如Gauss消去法、迭代法等)求解由 系统刚度矩阵和总载荷向量构成的线性方程组。
解的收敛性与稳定性
02 弹性力学基本方程
应力和应变的关系
01
02
03
胡克定律
在弹性范围内,应力与应 变之间存在线性关系,即 应力与应变成正比。
应变分量
描述物体变形的量,包括 线应变和角应变。
应力分量
描述物体内部受力情况的 量,包括正应力和剪切应 力。
平衡方程
静力平衡
物体在无外力作用下保持静止状态, 即合力为零。
弹性力学平面问题的有限元法
129331406890781250平面有限元法作业

第三章作业3-1:试证明平面三角形单元内任一点的形函数之和恒等于1。
证明1:设单元发生X 方向的刚体位移0u ,则单元内到处应有位移0u ,有0u u u u m j i ===()00u u N N N u N u N u N u m j i m m j j i i =++=++=1=++m j i N N N若位移函数不满足此要求,则不能反映单元的刚体位移,不能得到正确的结果。
#证明2:设P 是三角形内任一点,可用面积坐标表示为()m j i L L L P 。
由面积坐标的定义和性质知1=++m j i L L L ,且三节点三角形的一点的面积坐标即为其形函数,故平面三角形单元内任一点的形函数之和恒等于1。
#3-2:试证明三角形单元的任一边上的一点的三个形函数与第三个顶点的坐标无关。
证明1:设k 是三角形ij 边上的任一点,点k 面积坐标得0==m m L N #证明2:三角形单元是协调单元,必须在单元边界上保持连续性,所以在单元边界上的点的位移只能由边上两个节点的形函数来贡献,否则就会撕裂和重叠,即(如在ij 边上的点)jj i i j j i i v N v N v u N u N u +=+=故三角形的三边上的点的形函数只与边上节点的坐标有关,而与第三点无关。
#3-3:证明三角形单元是常应变单元。
证明:y x u 321ααα++=,y x v 654ααα++=2αε=∂∂=xux 6αε=∂∂=yvy53ααγ+=∂∂+∂∂=xv y u xy # 即三角形单元是常应变单元。
3-4:已知单元刚度矩阵[][][][]tdxdy B D B k TA e⎰⎰=,试说明[][]D B ,分别是什么矩阵,与单元的那些特性有关?若厚度为t 的平面三角形常应变单元ijm 的单元刚度矩阵记为:[][][][][][][]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=mm jm jj im ij ii k k k k k k k 说明子块[]ij k 的物理意义,并证明[]k 为对称矩阵。
平面问题有限元解法(公式推导讲解)
设斜面AB 的长度为ds,则PB面及A面的长度
分别为 lds及mds,而PAB的面积为 ldsmds/2,
棱柱的厚度设为1。 由x轴平衡条件,得:
pxdsxldsxym dsfxlds2 m ds0
其中,fx为体力分量。将上式除以ds,并令ds趋于0(斜面AB趋于P点),即得:
px lxmxy
由y轴平衡条件,得:
py mx\ylxy
28.12.2020
h
18
几何方程
经过弹性体内的任意一点P,沿x
轴和y轴的正方向取两个微小长度
v
的线段PA=dx和PB=dy。假定弹
性体受力后,P,A,B三点分别移动
到P’,A’,B’.
v v dy
y
线段PA的线应变是: x
u
u x
dx
dx
u
u x
u
即: 三大方面
三大方程
求解方法
经典解析 半解析 传统数值解法 现代数值解法(计算机硬件、规范化、标准化、规模化)
28.12.2020
h
3
有限元单元模型中几个重要概念
单元
网格划分中每一个小的块体
节点
单元
确定单元形状、单元之间相互联结的 点
节点力
单元上节点处的结构内力
载荷
作用在单元节点上的外力 (集中力、分布力)
28.12.2020
h
6
有限元单元法分析步骤(二)
单元特性分析
选择未知量模式 选择节点位移作为基本未知量时,称为位移法; 选节点力作为基本未知量时,称为力法; 取一部分节点位移和一部分节点力作为未知量,称为混合法。
分析单元力学性质 根据单元材料性质、形状、尺寸、节点数目、位置等,找出单元 节点力和节点位移关系式,应用几何方程和物理方程建立力和位 移的方程式,从而导出单元刚度矩阵。
有限单元法平面问题例题
把μ=0,t=1m,代入单元的刚度矩阵,得两种单元的刚度矩阵k都是:
0.5 0
0 0 0.5 0
0
0.25 0.25
0 0.25 0.25
0 0.25 0.25 0 0.25 0.25
k E
0
0
0
0.5
0
0.5
0.5 0.25 0.25 0 0.75 0.25
0 0.25 0.25 0.5 0.25 0.75
F L ( 100000 )
精选ppt
32
平面有限元解法——求解整体结点载荷列阵
求解化简后的整体刚度矩阵: K FL
0.5 0.5 0 0 0 0.5 1.5 0.25 0.5 0.25
0 v1 1
0
v2
0
0
E
0
0.25 1.5 0.5 0.25
0.25 0.5 1.5 0.25
0 0
17
3 单元分析
精选ppt
18
3 单元分析
精选ppt
19
3 单元分析
3.6 推导内部任意一点应力和结点位移的转换关系 平面应力的弹性矩阵为
精选ppt
20
3 单元分析
把D、B矩阵代入公式即可应力转换矩阵S
精选ppt
21
3 单元分析
3.7 得到单元刚度矩阵 把B和D矩阵代入
对3结点三角形,可以简化为
(37’)
将上式中各子块的具体数值代入整体刚度矩阵K表达式中,得出整体刚度矩阵。
精选ppt
27
4 整体刚度矩阵
整体刚度矩阵K
0.25 0 0.25 0.25 0 0.25 0
0
0
0 0 00Biblioteka 0.500.5
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
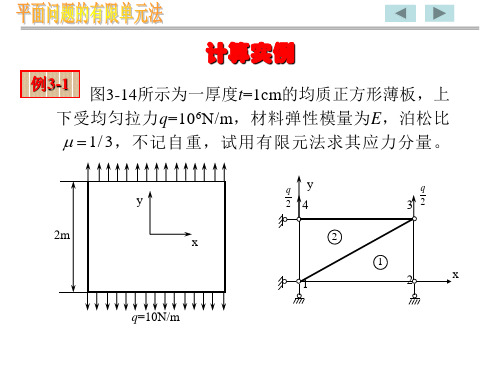
第三章 平面问题的有限元法作业
1. 图示一个等腰三角形单元及其节点编码情况,设μ=0,单元厚度为t 。
求 1)形函数矩阵[]N ;2)应变矩阵[]B ;3)应力矩阵[]S 。
4
第1题图 第2题图
2. 如题图所示,结构为边长等于a 的正方形,已知其节点位移分别为:11(,)u v 、
22(,)u v 、33(,)u v 、44(,)u v 。
试求A 、B 、C 三点的位移。
其中A 为正方形形心,B 为三角形形心。
3.直角边边长为l 的三角形单元,如题图所示。
试计算单元等效节点载荷列阵(单元厚度为t ,不计自重)。
第3题图 第4题图
4. 如题图所示,各单元均为直角边边长等于l 的直角三角形。
试计算(1)单元等效节点载荷列阵;(2)整体等效节点载荷列阵。
已知单元厚度为t ,不计自重。
5.下列3个有限元模型网格,哪种节点编号更合理?为什么?
9
34
6
7912
11
34
6
12142
(a) (b) (c)
第5题图
6.将图示结构画出有限元模型;标出单元号和节点号;给出位移边界条件;并计算半带宽(结构厚度为t )。
2a
(a) (b) 无限长圆筒 (c) 第6题图
7. 结构如图所示,已知结构材料常数E 和 ,单元厚度为t 。
利用结构的对称性,采用一个单元,分别计算节点位移和单元应力。
第7题图
答案:
1. 1)形函数
i x N a =
, j y N a = , 1m x y N a a
=-- 2)应变矩阵
[]1000101
000101011011B a -⎡⎤⎢⎥=-⎢⎥--⎢⎥⎣⎦
3)应力矩阵
[]100010100
01
0111
110022
2
2S a ⎡
⎤⎢⎥-⎢
⎥=-⎢⎥⎢⎥-
-⎢
⎥⎣
⎦
2. A 点的位移为
()2312A u u u =
+ , ()231
2A v v v =+ B 点的位移为
()24313B u u u u =
++ , ()2431
3B v v v v =++ C 点的位移为
()1223C a u u u =
+ , ()C 1223
a
v v v =+ 3. 单元等效节点载荷列阵为
{}11
11
00003
663
T
e
i j i j
R q q q q ⎡⎤
=++⎢⎥
⎣⎦
4. (2)整体等效节点载荷向量为
{}111100006
322T
R qlt P qlt P P
qlt qlt ⎡⎤
=-⎢⎥⎣⎦ 7. (1) 减缩后的整体刚度方程
22
12
2
1222
22221110222021102(1)2
2102x x b b ab R b ab b P v Et
ab a b ab ab R v b a μμμ
μμμμμμ---⎡⎤-
-
⎢⎥⎧⎫⎧⎫⎢⎥⎪⎪--⎪⎪⎢⎥⎪⎪
-⎪⎪⎢
⎥=⎨⎬⎨⎬---+
+⎢
⎥⎪⎪⎪
⎪⎢⎥⎪⎪⎪⎪⎩⎭-⎢⎥⎩⎭+⎢⎥
⎣
⎦ 节点位移
22(1)
Pb v Eat
μ+=- , 22
12212b a v v b
μ-+
=
单元应力为
{}()2122
201012bv E bv bv ab av μσμμ⎛⎫⎧⎫ ⎪⎪⎪-⎧⎫ ⎪
⎪⎪⎪⎪=+-⎨⎬⎨⎬ ⎪-⎪⎪⎪⎪ ⎪
-⎩⎭⎪⎪-
⎪⎩⎭⎝
⎭。