Ansys-workbench位移约束的类型
ansys workbench中的边界条件约束详解

ansys workbench中的边界条件约束详解ANSYS Workbench中的边界条件约束详解ANSYS Workbench是一种通用的有限元分析软件,广泛应用于工程设计、仿真和优化。
在进行仿真分析时,正确地设置边界条件是非常关键的一步。
边界条件定义了模型的外部环境,并对物体施加约束或加载,以模拟实际工作条件。
本文将详细讨论ANSYS Workbench中的边界条件约束,一步一步地回答以下问题。
1. 什么是边界条件约束?在ANSYS Workbench中,边界条件约束是指对模拟模型中的物体施加的限制条件或加载。
这些约束可以是外力、固定支撑点、固定边界或其他类型的条件,用于模拟现实世界中物体所受的外部情况。
2. 如何在ANSYS Workbench中设置边界条件约束?在ANSYS Workbench中设置边界条件约束有以下几个步骤:a. 创建几何模型:首先,根据实际需要创建几何模型,并进行相关的几何操作,比如创建零件、装配等。
b. 定义材料特性:为模型中的各个物体定义相应的材料特性,例如弹性模量、密度、热传导系数等。
c. 网格划分:对几何模型进行网格划分,将其划分为适当的网格单元,用于数学求解。
d. 设置约束:在边界条件编辑器中,通过选择适当的图形工具和选项,设置所需的边界条件约束。
这些约束可以是外力、固定支撑点、固定边界或其他类型的条件。
e. 网格连接:对于多个物体组成的装配模型,还需要将相邻网格之间的连接设置得当,以确保模拟的连续性。
3. 外力约束是如何设置的?外力约束是指施加在模拟模型上的外部载荷或力。
在ANSYS Workbench中,可以通过以下步骤设置外力约束:a. 在边界条件编辑器中选择适当的图形工具,如力矢量或单点力工具。
b. 在模拟模型上选择力作用点,可以是单个点或一组点,也可以是物体的表面等。
c. 输入或定义所需的外力大小和方向。
d. 根据需求设置负载的类型,如压力、力或流体力等。
workbench 转子动力学 远端位移约束

workbench 转子动力学远端位移约束
摘要:
1.工作台(workbench) 的概述
2.转子动力学的基本概念
3.远端位移约束的定义和作用
4.工作台、转子动力学和远端位移约束之间的关系
5.应用实例
正文:
1.工作台(workbench) 的概述
工作台,也被称为工作台面,是一种用于支撑和固定工件的设备。
它们通常用于机械加工、装配和维修等领域,以提供一个平坦、稳定的表面,以便进行精确的工作。
2.转子动力学的基本概念
转子动力学是研究旋转机械设备运行和维护的学科,包括转子的设计、制造、运行、维护、故障诊断和性能优化等方面。
转子动力学的研究对象包括涡轮机、泵、压缩机、电机等旋转设备。
3.远端位移约束的定义和作用
远端位移约束,也称为偏移约束,是一种用于限制物体在空间中的位移的约束。
在转子动力学中,远端位移约束通常用于限制转子的位移,以确保其运行的安全性和稳定性。
4.工作台、转子动力学和远端位移约束之间的关系
在工作台中,转子动力学和远端位移约束是密切相关的。
工作台可以作为
转子动力学的支撑系统,远端位移约束可以保证转子的稳定性和安全性。
5.应用实例
以风力发电机为例,风力发电机的转子是其关键部件之一。
在设计转子时,需要考虑转子的动力学性能,包括转子的弯曲、扭转和振动等。
同时,需要通过设置远端位移约束,来保证转子在运行过程中的稳定性和安全性。
此外,远端位移约束也可以用于工作台的设计和制造中。
例如,在设计和制造用于加工大型工件的工作台时,需要考虑工件的尺寸和重量,以及加工过程中可能出现的位移和变形。
Ansys Workbench详解教程
2013-8-5
34
网格划分
三维实体的四面体(Tetrahedron) 单元划分
三维实体的六面体(Hexahedron) 单元划分
4 选择分析类型
静力学分析(Static Analysis) :
计算在固定不变的载荷作用下结构的响应,不考虑惯性和阻尼的影 响,如结构受随时间变化载荷的影响。
网格控制
整体网格:
Relevance(-100~100) 、 Relevance Center(coarse~ fine)
局部细化: 支撑处、载荷施加位置、应力变化较大的地方。
2013-8-5
33
网格控制
具体操作:选中结构树的Mesh项,点击鼠标右键,选择Insert,弹出 对网格进行控制的各分项,一般只需设置网格的形式(Method)和单元的 大小(Sizing)。 其余一些网格控制项的意义:
2013-8-5
12
工具条
常用工具条
图形工具条
2013-8-5
13
结构树
结构树包含几何模型的信息和整个分析
的相关过程。
一般由Geometry、Connections、Mesh、 分析类型和结果输出项组成,分析类型里包
括载荷和约束的设置。
说明分支全部被定义 说明输入的数据不完整
说明需要求解
说明被抑制,不能被求解 说明体或零件被隐藏
2013-8-5
29
2 定义材料属性
1、双击Component Systems中的Engineering Data。 2、 右击Engineering Data----edit 3、选择view中outline、properties,把General Materials等中的材料添加到 Engineering Data中,修改Density密度、Young’s modulus杨氏模量、 Poisson’s Ratio泊松比、热膨胀系数等参数。 4、点击Return to Project 5、右击Model----Update 6、右击Model-----edit 7、在模型的Material----Assignment右面的箭头可选择材料 注:软件默认的材料是Structural Steel。
Workbench 荷载、约束、接触定义(总结版)

Workbench荷载约束接触定义目录workbench荷载的含义 (1)Workbench约束的含义 (3)接触 (4)workbench荷载的含义1)方向载荷对大多数有方向的载荷和支撑,其方向多可以在任意坐标系中定义:–坐标系必须在加载前定义而且只有在直角坐标系下才能定义载荷和支撑的方向.–在Details view中, 改变“Define By”到“Components”. 然后从下拉菜单中选择合适的直角坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和支撑支持使用坐标系。
2)加速度(重力)–加速度以长度比上时间的平方为单位作用在整个模型上。
–用户通常对方向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻止加速度所产生的变化,从而惯性力的方向与所施加的加速度的方向相反。
–加速度可以通过定义部件或者矢量进行施加。
标准的地球重力可以作为一个载荷施加。
–其值为9.80665 m/s2 (在国际单位制中)–标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。
–由于“标准的地球重力”是一个加速度载荷,因此,如上所述,需要定义与其实际相反的方向得到重力的作用力。
3)旋转速度旋转速度是另一个可以实现的惯性载荷–整个模型围绕一根轴在给定的速度下旋转–可以通过定义一个矢量来实现,应用几何结构定义的轴以及定义的旋转速度–可以通过部件来定义,在总体坐标系下指定初始和其组成部分–由于模型绕着某根轴转动,因此要特别注意这个轴。
–缺省旋转速度需要输入每秒所转过的弧度值。
这个可以在路径“Tools > ControlPanel >Miscellaneous > Angular Velocity” 里改变成每分钟旋转的弧度(RPM)来代替。
4)压力载荷:–压力只能施加在表面并且通常与表面的法向一致–正值代表进入表面(例如压缩);负值代表从表面出来(例如抽气等)–压力的单位为每个单位面积上力的大小5)力载荷:–力可以施加在结构的最外面,边缘或者表面。
ansys 载荷和约束

Contact Geometry
Solid Body Face
Solid Body Edge
Surface Body Face
Surface Body Edge
Solid Body Face
All types Bonded
Bonded, No
Separation
Bonded, No Separation
–
用户可以在
“Contact”
菜单下,指定探测自动接触距离的滑块来控制容差
在
DS
中,在每个接触对中都要定义目标面和接触面。
–
接触区域的其中一个表面构成
“
接触
”
面,此区域的另一个表面构成
“
目标
”
面。
–
接触中利用目标面的渗透量(在给定容差范围内)来限制接触面上的积分点。但是其相反的情况是
不正确的。
•
当一个面为目标面而另一个面为接触面时称为不对称接触。
• pinball region
定义了近距离开放式接触的位置。而超出
pinball region
范围之外的为远距离开放式接
触。
•
最初,
pinball region
作为十分有效的接触探测器使用,但是它也用于其它方面,例如绑定接触等。
•
对于绑定或者不分离的接触,假如间隙或者渗透小于
pinball region
–
焊点也可以在
DS
中生成,但是只能在不连续的顶点处生成。
2
)接触结果
–
对于所选择的有接触单元的实体或者表面接触结果可被要求
.
–
ANSYS
中接触单元利用的是接触面和目标面的概念
workbench简支梁约束条件

workbench简支梁约束条件
Workbench简支梁的约束条件是指在模拟过程中对梁端点的约束要求。
常见的约束条件有以下几种:
1. 固支约束:将一端或两端的位移和转角固定,阻止其产生变形或旋转。
这使得支点处的位移和转角为零。
2. 铰支约束:允许梁在某个支点处自由转动,但不允许发生水平或垂直方向的位移。
这种约束条件通常在单一支点处施加。
3. 滑动约束:允许梁在某个支点处沿某个方向上自由滑动,但不允许水平或垂直方向上的位移或转动。
这种约束条件通常在单一支点处施加。
4. 约束力施加:在梁端点处施加水平或垂直方向的约束力,以模拟外部支撑的影响。
这些约束力可以通过施加等效的反作用力来实现。
在使用Workbench进行梁结构分析时,需要根据具体情况选择适当的约束条件,并将其应用于梁的端点,以模拟实际情况下的约束约束。
这些约束条件对于准确模拟和分析梁的行为具有重要作用。
Ansys Workbench界面命令说明
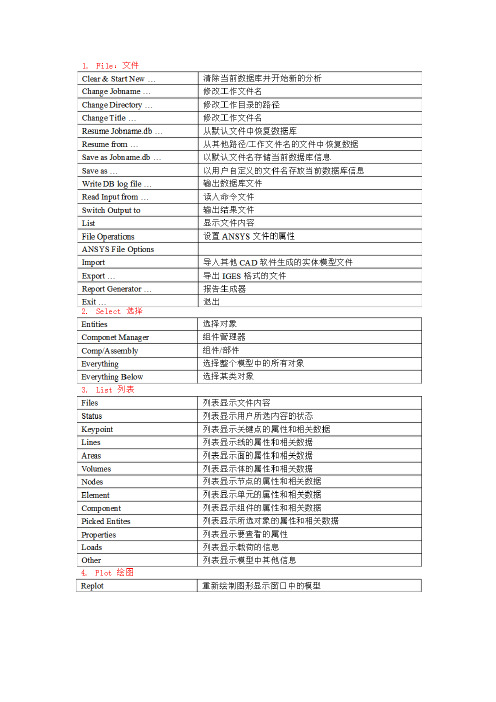
Ansys Workbench界面命令说明1、 ANSYS15 Workbench界面相关分析系统和组件说明【Analysis Systems】分析系统【Component Systems】组件系统【CustomSystems】自定义系统【Design Exploration】设计优化分析类型说明Electric (ANSYS) ANSYS电场分析Explicit Dynamics (ANSYS) ANSYS显式动力学分析Fluid Flow (CFX) CFX流体分析Fluid Flow (Fluent) FLUENT流体分析Hamonic Response (ANSYS) ANSYS谐响应分析Linear Buckling (ANSYS) ANSYS线性屈曲Magnetostatic (ANSYS) ANSYS静磁场分析Modal (ANSYS) ANSYS模态分析Random Vibration (ANSYS) ANSYS随机振动分析Response Spectrum (ANSYS) ANSYS响应谱分析Shape Optimization (ANSYS) ANSYS形状优化分析Static Structural (ANSYS) ANSYS结构静力分析Steady-State Thermal (ANSYS) ANSYS稳态热分析Thermal-Electric (ANSYS) ANSYS热电耦合分析Transient Structural(ANSYS) ANSYS结构瞬态分析Transient Structural(MBD) MBD 多体结构动力分析Transient Thermal(ANSYS) ANSYS瞬态热分析组件类型说明AUTODYN AUTODYN非线性显式动力分析BladeGen 涡轮机械叶片设计工具CFX CFX高端流体分析工具Engineering Data 工程数据工具Explicit Dynamic(LS-DYNA) LS-DYNA 显式动力分析Finite Element Modeler FEM有限元模型工具FLUNET FLUNET 流体分析Geometry 几何建模工具Mechanical APDL 机械APDL命令Mechanical Model 机械分析模型Mesh 网格划分工具Results 结果后处理工具TurboGrid 涡轮叶栅通道网格生成工具Vista TF 叶片二维性能评估工具2、主菜单【File】文件操作【View】窗口显示【Tools】提供工具【Units】单位制【Help】帮助信息3、基本工具条【New】新建文件【Open】打开文件【Save】保存文件【Save As】另存为文件【Import】导入模型【Compact Mode】紧凑视图模式【Shade Exterior and Edges】轮廓线显示【Wireframe】线框显示【Ruler】显示标尺【Legend】显示图例【Triad】显示坐标图示【Expand All】展开结构树【Collapse Environments】折叠结构树【Collapse Models】折叠结构树中的Models项【Named Selections】命名工具条【Unit Conversion】单位转换工具【Messages:Messages】信息窗口【Simulation Wizard】向导【Graphics Annotations】注释【Section Planes】截面信息窗口【Reset Layout】重新安排界面4、建模【Geometry】几何模型【New Geometry】新建几何模型【Details View】详细信息窗口【Graphics】图形窗口:显示当前模型状态【Extrude】拉伸【Revolve】旋转【Sweep】扫掠【Skin/Loft】蒙皮【Thin/Surface】抽壳: 【Thin】创建薄壁实体【Surface】创建简化壳【Face to Remove】删除面:所选面将从体中删除。
Ansys Workbench详解教程
实现上述操作,也可以利用鼠标和键
2020/4/23
B
24
制定分析方案
有限元分析(FEA)工作的定位:开发流程的什么阶段进行? FEA分析的目标:刚度/强度,位移/应力,模态…
材料屈服?网格细化?网格较为均匀。
分析领域:结构、热 分析类型:静力分析、模态分析 材料特性、载荷、约束 网格密度 前处理:模型简化、建模技巧(对称性的利用)…
2020/4/23
B
29
2 定义材料属性
1、双击Component Systems中的Engineering Data。 2、 右击Engineering Data----edit 3、选择view中outline、properties,把General Materials等中的材料添加到
Engineering Data中,修改Density密度、Young’s modulus杨氏模量、 Poisson’s Ratio泊松比、热膨胀系数等参数。 4、点击Return to Project 5、右击Model----Update 6、右击Model-----edit 7、在模型的Material----Assignment右面的箭头可选择材料 注:软件默认的材料是Structural Steel。
8
ANSYS Workbench 软件介绍
运行软件 操作界面简介 基本操作 分析流程的各项操作
2020/4/23
B
9
运行软件
方法一:从CAD软件中进入
方法二:单击开始菜单,
选择程序命令;
从Ansys程序组
中选择
AnsysWorkbench程序。
启动该软件后,出现一模块选择对话框。
2020/4/23
Workbench-荷载、约束、接触定义(总结版)

Workbench荷载约束接触定义目录workbench荷载的含义 (1)Workbench约束的含义 (3)接触 (4)workbench荷载的含义1)方向载荷对大多数有方向的载荷和支撑,其方向多可以在任意坐标系中定义:–坐标系必须在加载前定义而且只有在直角坐标系下才能定义载荷和支撑的方向.–在Details view中, 改变“Define By”到“Components”. 然后从下拉菜单中选择合适的直角坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和支撑支持使用坐标系。
2)加速度(重力)–加速度以长度比上时间的平方为单位作用在整个模型上。
–用户通常对方向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻止加速度所产生的变化,从而惯性力的方向与所施加的加速度的方向相反。
–加速度可以通过定义部件或者矢量进行施加。
标准的地球重力可以作为一个载荷施加。
–其值为9.80665 m/s2 (在国际单位制中)–标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。
–由于“标准的地球重力”是一个加速度载荷,因此,如上所述,需要定义与其实际相反的方向得到重力的作用力。
3)旋转速度旋转速度是另一个可以实现的惯性载荷–整个模型围绕一根轴在给定的速度下旋转–可以通过定义一个矢量来实现,应用几何结构定义的轴以及定义的旋转速度–可以通过部件来定义,在总体坐标系下指定初始和其组成部分–由于模型绕着某根轴转动,因此要特别注意这个轴。
–缺省旋转速度需要输入每秒所转过的弧度值。
这个可以在路径“Tools > ControlPanel >Miscellaneous > Angular Velocity” 里改变成每分钟旋转的弧度(RPM)来代替。
4)压力载荷:–压力只能施加在表面并且通常与表面的法向一致–正值代表进入表面(例如压缩);负值代表从表面出来(例如抽气等)–压力的单位为每个单位面积上力的大小5)力载荷:–力可以施加在结构的最外面,边缘或者表面。
最新Workbench-荷载、约束、接触定义(总结版)
Workbench荷载约束接触定义目录workbench荷载的含义 (1)Workbench约束的含义 (3)接触 (4)workbench荷载的含义1)方向载荷对大多数有方向的载荷和支撑,其方向多可以在任意坐标系中定义:–坐标系必须在加载前定义而且只有在直角坐标系下才能定义载荷和支撑的方向.–在Details view中, 改变“Define By”到“Components”. 然后从下拉菜单中选择合适的直角坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和支撑支持使用坐标系。
2)加速度(重力)–加速度以长度比上时间的平方为单位作用在整个模型上。
–用户通常对方向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻止加速度所产生的变化,从而惯性力的方向与所施加的加速度的方向相反。
–加速度可以通过定义部件或者矢量进行施加。
标准的地球重力可以作为一个载荷施加。
–其值为9.80665 m/s2 (在国际单位制中)–标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。
–由于“标准的地球重力”是一个加速度载荷,因此,如上所述,需要定义与其实际相反的方向得到重力的作用力。
3)旋转速度旋转速度是另一个可以实现的惯性载荷–整个模型围绕一根轴在给定的速度下旋转–可以通过定义一个矢量来实现,应用几何结构定义的轴以及定义的旋转速度–可以通过部件来定义,在总体坐标系下指定初始和其组成部分–由于模型绕着某根轴转动,因此要特别注意这个轴。
–缺省旋转速度需要输入每秒所转过的弧度值。
这个可以在路径“Tools > ControlPanel >Miscellaneous > Angular Velocity” 里改变成每分钟旋转的弧度(RPM)来代替。
4)压力载荷:–压力只能施加在表面并且通常与表面的法向一致–正值代表进入表面(例如压缩);负值代表从表面出来(例如抽气等)–压力的单位为每个单位面积上力的大小5)力载荷:–力可以施加在结构的最外面,边缘或者表面。
Workbench荷载、约束、接触定义(总结版)

Workbench荷载约束接触定义目录workbe nch荷载的含义................................................................................错误!未定义书签。
Workbe nch约束的含义...............................................................................错误!未定义书签。
接触...........................................................................................................错误!未定义书签。
workbe nch荷载的含义1)方向载荷对大多数有方向的载荷和支撑,其方向多可以在任意坐标系中定义:–坐标系必须在加载前定义而且只有在直角坐标系下才能定义载荷和支撑的方向.–在Detai ls view中,改变“DefineBy”到“Compon ents”.然后从下拉菜单中选择合适的直角坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和支撑支持使用坐标系。
2)加速度(重力)–加速度以长度比上时间的平方为单位作用在整个模型上。
–用户通常对方向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻止加速度所产生的变化,从而惯性力的方向与所施加的加速度的方向相反。
–加速度可以通过定义部件或者矢量进行施加。
标准的地球重力可以作为一个载荷施加。
–其值为9.80665m/s2 (在国际单位制中)–标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。
–由于“标准的地球重力”是一个加速度载荷,因此,如上所述,需要定义与其实际相反的方向得到重力的作用力。
ANSYS WORKBENCH 11.0模态分析

2-4
Workbench-Simulation Dynamics
模态分析
B. 术语和概念
• 运动控制方程:
[M]{&u&}+ [C]{u&}+ [K]{u}= {F(t)}
• 假设为自由振动,忽略阻尼:
[M]{&u&}+ [K]{u}= {0}
• 假设为谐响应运动 ( i.e. u = U sin(ωt) )
模态分析步骤
...施加边界条件和求解
位移约束 (continued): • 使用对称边界条件要特别的小心. • 对称边界条件只能产生对称的模态,所以会
丢失一些模态.
Training Manual
Full Model
Symmetry BC Anti-Symmetry BC
2-24
Workbench-Simulation Dynamics
模态分析
Module 2
Workbench-Simulation Dynamics
Module 2
模态分析
A. 模态分析定义与目的 B. 讨论相关的概念、术语和模态提取方法 C. 学习如何在Workbench 进行模态分析 D. 模态分析练习
Training Manual
2-2
Workbench-Simulation Dynamics
Workbench-Simulation Dynamics
模态分析步骤
…施加边界条件和求解
位移约束: • 施加固定支撑. • 在没有约束的方向将会计算刚体模态. • 不允许存在非零位移.
Training Manual 2-23
Workbench-Simulation Dynamics
workbench 转子动力学 远端位移约束

标题:深入探讨workbench转子动力学及远端位移约束一、引言在工程设计和机械领域,转子动力学是一个重要的研究领域。
而在工程实践中,远端位移约束又是一个常见但复杂的问题。
本文将深入探讨workbench转子动力学及远端位移约束,帮助读者全面理解这一主题。
二、workbench转子动力学的基本概念1. workbench转子动力学的定义workbench转子动力学是指在工程领域中,研究转子在旋转运动中受到的力学、动力学以及振动等影响的学科领域。
2. 转子动力学的原理和应用workbench转子动力学研究的对象是旋转机械系统,如风力发电机、汽轮机、离心压缩机等,旨在分析和优化系统的振动、动力等性能,保证系统的安全运行和稳定性。
3. 转子动力学的数学模型在workbench转子动力学的研究中,数学模型是非常重要的工具。
通过建立数学模型,可以对转子系统的运动、振动、受力等进行准确描述和分析。
三、远端位移约束的理论基础1. 远端位移约束的概念和意义远端位移约束是指在机械系统中,远离约束点的一端受到的位移限制。
在工程设计中,远端位移约束的合理性对系统的稳定性和性能有重要影响。
2. 远端位移约束的分类远端位移约束可以分为完全约束和部分约束两种情况。
完全约束指系统在受到约束后完全无法移动,而部分约束指系统在受到约束后仍然可以有限制的运动。
3. 远端位移约束的数学描述在工程实践中,远端位移约束需要通过数学方法进行描述和分析,常用的方法包括拉格朗日乘子法、有限元法等。
四、workbench转子动力学中的远端位移约束分析1. 远端位移约束对转子动力学的影响在workbench转子动力学中,远端位移约束的存在会直接影响转子的振动特性、受力状态等,需要进行深入分析和研究。
2. 远端位移约束的数学建模针对workbench转子动力学中的远端位移约束问题,需要建立相应的数学模型,对系统的动力学特性进行分析和预测。
3. 案例分析:XXX转子系统中的远端位移约束以XXX转子系统为例,探讨其中存在的远端位移约束问题,并分析其对系统性能的影响和解决方法。
Workbench-荷载、约束、接触定义(总结版)

Workbench-荷载、约束、接触定义(总结版)Workbench荷载约束接触定义⽬录workbench荷载的含义 (1)Workbench约束的含义 (5)接触 (8)workbench荷载的含义1)⽅向载荷对⼤多数有⽅向的载荷和⽀撑,其⽅向多可以在任意坐标系中定义:–坐标系必须在加载前定义⽽且只有在直⾓坐标系下才能定义载荷和⽀撑的⽅向.–在Details view中, 改变“Define By”到“Components”. 然后从下拉菜单中选择合适的直⾓坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和⽀撑⽀持使⽤坐标系。
2)加速度(重⼒)–加速度以长度⽐上时间的平⽅为单位作⽤在整个模型上。
–⽤户通常对⽅向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻⽌加速度所产⽣的变化,从⽽惯性⼒的⽅向与所施加的加速度的⽅向相反。
–加速度可以通过定义部件或者⽮量进⾏施加。
标准的地球重⼒可以作为⼀个载荷施加。
–其值为9.80665 m/s2 (在国际单位制中)–标准的地球重⼒载荷⽅向可以沿总体坐标轴的任何⼀个轴。
–由于“标准的地球重⼒”是⼀个加速度载荷,因此,如上所述,需要定义与其实际相反的⽅向得到重⼒的作⽤⼒。
3)旋转速度旋转速度是另⼀个可以实现的惯性载荷–整个模型围绕⼀根轴在给定的速度下旋转–可以通过定义⼀个⽮量来实现,应⽤⼏何结构定义的轴以及定义的旋转速度–可以通过部件来定义,在总体坐标系下指定初始和其组成部分–由于模型绕着某根轴转动,因此要特别注意这个轴。
–缺省旋转速度需要输⼊每秒所转过的弧度值。
这个可以在路径“Tools > ControlPanel >Miscellaneous > Angular Velocity” ⾥改变成每分钟旋转的弧度(RPM)来代替。
4)压⼒载荷:–压⼒只能施加在表⾯并且通常与表⾯的法向⼀致–正值代表进⼊表⾯(例如压缩);负值代表从表⾯出来(例如抽⽓等)–压⼒的单位为每个单位⾯积上⼒的⼤⼩5)⼒载荷:–⼒可以施加在结构的最外⾯,边缘或者表⾯。
Ansys-Workbench详解教程
2
有限元基本概念
概念
把一个原来是连续的物体划分为有限个单元,这些单元通过有
限个节点相互连接,承受与实际载荷等效的节点载荷,并根据力的 平衡条件进行分析,然后根据变形协调条件把这些单元重新组合成能
够进行综合求解的整体。 有限元法的基本思想—离散化。
节点 单元 载荷 约束 分析类型
2024/8/6
3
有限元模型
2024/8/6
30
定义材料属性
4、在线性静力结构分析当中,材料属性只需要定义杨氏模量以及泊松比。
– 假如有任何惯性载荷,密度是必须要定义的;模态分析中同样需要定义材 料密度。
2024/8/6
31
3 网格控制
目的:实现几何模型
原则:整体网格控制
有限元模型的转化 局部网格细化
2024/8/6
32
网格控制
整体网格: Relevance(-100~100) 、 Relevance Center(coarse~ fine)
局部细化: 支撑处、载荷施加位置、应力变化较大的地方。
2024/8/6
33
网格控制
具体操作:选中结构树的Mesh项,点击鼠标右键,选择Insert,弹出 对网格进行控制的各分项,一般只需设置网格的形式(Method)和单元的 大小(Sizing)。
2024/8/6
29
2 定义材料属性
1、双击Component Systems中的Engineering Data。 2、 右击Engineering Data----edit 3、选择view中outline、properties,把General Materials等中的材料添加到
Engineering Data中,修改Density密度、Young’s modulus杨氏模量、 Poisson’s Ratio泊松比、热膨胀系数等参数。 4、点击Return to Project 5、右击Model----Update 6、右击Model-----edit 7、在模型的Material----Assignment右面的箭头可选择材料 注:软件默认的材料是Structural Steel。
ANSYS workbench的五种接触类型分析

Workbench中提供了5种接触类型,单从字面上很难理解这几种接触的区别,下面将帮助中关于这几个接触类型的描述翻译出来,供参考:1.Bonded(绑定):这是AWE中关于接触的默认设置。
如果接触区域被设置为绑定,不允许面或线间有相对滑动或分离。
可以将此区域看做被连接在一起。
因为接触长度/面积是保持不变的,所以这种接触可以用作线性求解。
如果接触是从数学模型中设定的,程序将填充所有的间隙,忽略所有的初始渗透。
2.No Separation(不分离):这种接触方式和绑定类似。
它只适用于面。
不允许接触区域的面分离,但是沿着接触面可以有小的无摩擦滑动。
3.Frictionless(无摩擦):这种接触类型代表单边接触,即,如果出现分离则法向压力为零。
只适用于面接触。
因此,根据不同的载荷,模型间可以出现间隙。
它是非线性求解,因为在载荷施加过程中接触面积可能会发生改变。
假设摩擦系数为零,因此允许自由滑动。
使用这种接触方式时,需注意模型约束的定义,防止出现欠约束。
程序会给装配体加上弱弹簧,帮助固定模型,以得到合理的解。
4.Rough(粗糙的):这种接触方式和无摩擦类似。
但表现为完全的摩擦接触,即没有相对滑动。
只适用于面接触。
默认情况下,不自动消除间隙。
这种情况相当于接触体间的摩擦系数为无穷大。
5.Frictional(有摩擦):这种情况下,在发生相对滑动前,两接触面可以通过接触区域传递一定数量的剪应力。
有点像胶水。
模型在滑动发生前定义一个等效的剪应力,作为接触压力的一部分。
一旦剪应力超过此值,两面将发生相对滑动。
只适用于面接触。
摩擦系数可以是任意非负值。
其他总结:Bonded:无相对位移,如同共用节点。
No Separation:法向不分离,切向可以有小位移。
后面三种为非线性接触。
Frictionless:法向可分离,但不渗透,切向自由滑动。
Rough:法向可分离,不渗透,切向不滑动。
Frictional:法向可分离,不渗透,切向滑动,有摩擦力。
ANSYS workbench的五种接触类型分析
Workbench中提供了5种接触类型,单从字面上很难理解这几种接触的区别,下面将帮助中关于这几个接触类型的描述翻译出来,供参考:1.Bonded(绑定):这是AWE中关于接触的默认设置。
如果接触区域被设置为绑定,不允许面或线间有相对滑动或分离。
可以将此区域看做被连接在一起。
因为接触长度/面积是保持不变的,所以这种接触可以用作线性求解。
如果接触是从数学模型中设定的,程序将填充所有的间隙,忽略所有的初始渗透。
2.No Separation(不分离):这种接触方式和绑定类似。
它只适用于面。
不允许接触区域的面分离,但是沿着接触面可以有小的无摩擦滑动。
3.Frictionless(无摩擦):这种接触类型代表单边接触,即,如果出现分离则法向压力为零。
只适用于面接触。
因此,根据不同的载荷,模型间可以出现间隙。
它是非线性求解,因为在载荷施加过程中接触面积可能会发生改变。
假设摩擦系数为零,因此允许自由滑动。
使用这种接触方式时,需注意模型约束的定义,防止出现欠约束。
程序会给装配体加上弱弹簧,帮助固定模型,以得到合理的解。
4.Rough(粗糙的):这种接触方式和无摩擦类似。
但表现为完全的摩擦接触,即没有相对滑动。
只适用于面接触。
默认情况下,不自动消除间隙。
这种情况相当于接触体间的摩擦系数为无穷大。
5.Frictional(有摩擦):这种情况下,在发生相对滑动前,两接触面可以通过接触区域传递一定数量的剪应力。
有点像胶水。
模型在滑动发生前定义一个等效的剪应力,作为接触压力的一部分。
一旦剪应力超过此值,两面将发生相对滑动。
只适用于面接触。
摩擦系数可以是任意非负值。
其他总结:Bonded:无相对位移,如同共用节点。
No Separation:法向不分离,切向可以有小位移。
后面三种为非线性接触。
Frictionless:法向可分离,但不渗透,切向自由滑动。
Rough:法向可分离,不渗透,切向不滑动。
Frictional:法向可分离,不渗透,切向滑动,有摩擦力。
最新Workbench-荷载、约束、接触定义(总结版)
Workbench荷载约束接触定义目录workbench荷载的含义 (1)Workbench约束的含义 (3)接触 (4)workbench荷载的含义1)方向载荷对大多数有方向的载荷和支撑,其方向多可以在任意坐标系中定义:–坐标系必须在加载前定义而且只有在直角坐标系下才能定义载荷和支撑的方向.–在Details view中, 改变“Define By”到“Components”. 然后从下拉菜单中选择合适的直角坐标系.–在所选坐标系中指定x, y, 和z分量–不是所有的载荷和支撑支持使用坐标系。
2)加速度(重力)–加速度以长度比上时间的平方为单位作用在整个模型上。
–用户通常对方向的符号感到迷惑。
假如加速度突然施加到系统上,惯性将阻止加速度所产生的变化,从而惯性力的方向与所施加的加速度的方向相反。
–加速度可以通过定义部件或者矢量进行施加。
标准的地球重力可以作为一个载荷施加。
–其值为9.80665 m/s2 (在国际单位制中)–标准的地球重力载荷方向可以沿总体坐标轴的任何一个轴。
–由于“标准的地球重力”是一个加速度载荷,因此,如上所述,需要定义与其实际相反的方向得到重力的作用力。
3)旋转速度旋转速度是另一个可以实现的惯性载荷–整个模型围绕一根轴在给定的速度下旋转–可以通过定义一个矢量来实现,应用几何结构定义的轴以及定义的旋转速度–可以通过部件来定义,在总体坐标系下指定初始和其组成部分–由于模型绕着某根轴转动,因此要特别注意这个轴。
–缺省旋转速度需要输入每秒所转过的弧度值。
这个可以在路径“Tools > ControlPanel >Miscellaneous > Angular Velocity” 里改变成每分钟旋转的弧度(RPM)来代替。
4)压力载荷:–压力只能施加在表面并且通常与表面的法向一致–正值代表进入表面(例如压缩);负值代表从表面出来(例如抽气等)–压力的单位为每个单位面积上力的大小5)力载荷:–力可以施加在结构的最外面,边缘或者表面。
Ansys workbench位移约束的类型

Ansys workbench位移约束的类型ansysworkbench位移约束的类型ansysworkbench位移约束的类型ansysworkbench约束的类型(1)固定约束(fixedsupport):—在顶点,边缘或面上约束所有自由度;—对于实体,限制x,y和z的平移:—对于壳和梁,管制x,y和z的位移和旋转。
(2)给定位移(displacement):—在顶点,边缘或面上取值未知的加速度;—允许在x,y和z方向给予强制位移;—输出“0”代表此方向上即为被约束;—不设定某个方向的值则意味着实体在这个方向上自由运动。
用于在点,边或面上施加已知位移,该约束允许给出x,y,z方向上的平动位移(在自定义坐标系下),当为“0”时表示该方向是受限的,当空白时表达该方向自由。
(3)并无摩擦约束(frictionlesssupport):—在面上施加法向约束:—对于实体,这个约束可以用施予一个等距边界条件去同时实现,因为等距面等同于法向约束。
(4)圆柱面约束(cylindricalsupport);—施予在圆柱表面;—用户可以指定是轴向,径向或者切向约束;—仅仅适用于于小变形(线性)分析。
(5)弹性约束(elasticsupport):该约束允许在面,边界上模拟相似弹簧的犯罪行为,基础的刚度为并使基础产生单位法向偏转所须要的压力。
(7)简单约束(simplesupported):可以将其施加在梁或壳体的边缘或者顶点上,用来限制平移,但是允许旋转并且所有旋转都是自由的。
(8)旋转约束(fixedrotation):可以将其施予在梁或壳体的边缘或者顶点上。
与直观约束恰好相反,它用以约束转动,但是不管制位移。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ansys workbench约束的类型
(1)固定约束(Fixed support):
—在顶点,边缘或面上约束所有自由度;
—对于实体,限制X,Y和Z的平移:
—对于壳和梁,限制X,Y和Z的平移和转动。
(2)给定位移(Displacement):
—在顶点,边缘或面上给定已知的位移;
—允许在X,Y和Z方向给予强制位移;
—输入“0”代表此方向上即被约束;
—不设定某个方向的值则意味着实体在这个方向上自由运动。
用于在点,边或面上施加已知位移,该约束允许给出X,Y,Z方向上的平动位移(在自定义坐标系下),当为“0”时表示该方向是受限的,当空白时表达该方向自由。
(3)无摩擦约束(Frictionless Support):
—在面上施加法向约束:
—对于实体,这个约束可以用施加一个对称边界条件来实现,因为对称面等同于法向约束。
(4)圆柱面约束(Cylindrical Support);
—施加在圆柱表面;
—用户可以指定是轴向,径向或者切向约束;
—仅仅适用于小变形(线性)分析。
(5)弹性约束(Elastic Support):该约束允许在面,边界上模拟
类似弹簧的行为,基础的刚度为使基础产生单位法向偏移所需要的压力。
(6)仅有压缩的约束(Compression only Support):该约束只能在正常压缩方向施加约束,它可以用来模拟圆柱面上受销钉,螺栓等的作用,求解时需要进行迭代。
(7)简单约束(Simple Supported):可以将其施加在梁或壳体的边缘或者顶点上,用来限制平移,但是允许旋转并且所有旋转都是自由的。
(8)转动约束(Fixed Rotation):可以将其施加在梁或壳体的边缘或者顶点上。
与简单约束相反,它用来约束旋转,但是不限制平移。