STL步进指令运用
4 步进顺控指令

先条件
后分支
后条件 先汇合
编程实例:
控制要求:
参考程序:
思考:用单 流程编写此 程序。
1、状态转移图及状态的功能
转移 条件
说明:状态S30有效时输出Y10、Y11动作,程序等 待转移条件X20动作。当X20接通时,动作状态就从 S30向S31转移(态转移:原态复位,目标置位)。 使Y10 OFF,Y12 ON。SET驱动的Y11保持接通。
2、简单流程的状态转移图
相关梯形图:
每一个状态,总是 先驱动,后转移。
先驱动
后转移
子母线应在STL下 一位引出,RET总 是从最后一个态的 子母线并联输出。
编程实例:
思考题:
1、四台电机M1、M2、M3、M4顺序控制。起动时按 M1、M2、M3、M4顺序走动,时间间隔分别为3s、 4s、5s,停止时按M4、M3、M2、M1顺序停止,时 间间隔分别为5s、4s、3s。走动时如发现某台电机有 故障,则按停止按钮,这台电机立即停止,其他电机 按反序停止。 2、试用步进顺控的方法设计一声光报警电路。要求启动 按钮后,报警灯亮0.5s,灭0.5s,闪烁100次,这段时间 蜂鸣器一直在响。100次到达,停10s后又重复上述过程, 由此反复三次,结束。
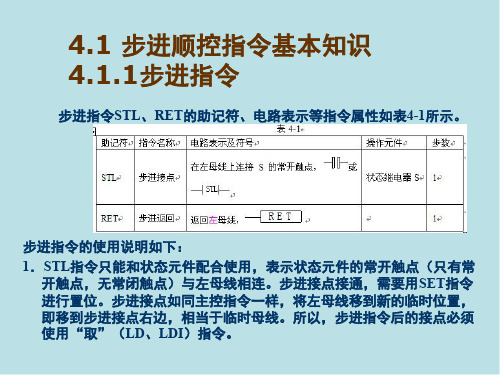
四、步进顺控指令
说明:步进顺控指令有两个:步进阶梯指令STL和返回指令 RET。STL是利用软元件对步进顺控问题进行工序步进式控 股集团的指令。RET是指状态流程结束,返回主程序。STL 触点通过置位指令(SET)激活。当STL触点激活,则与其 相连的电路接通;如果STL触点未激活,则与其相连的电路 断开。 STL触点与其它元件触点意义不尽相同。STL无常闭 触点,而且与其它触点:
PLC20100420-使用STL指令的编程方式
Y1 Y3 X1 Y2
1. 使用STL指令的编程方式
1) 单序列的编程方式
S0
M8002 X3 启动
Y1
Y0
S20
Y0
X2
X0
X1
X2
S21
Y1
X0
S22
X1
Y0
S23
X0
Y1
1) 单序列的编程方式
M8002
M8002 SET S0 S20 X3 SET S0 S20
S0
X3 启动
Y0
X2 SET S21
PLC原理及应用
主讲人:章娟
2010.04.20
任课老师
姓名:章娟 Email: hdzj1010@ 课件:hdu0606@ password:(hdu123456) 办公室:二教南328
授课计划
一、概述(2 学时)
二、PLC的硬件与工作原理(3 学时) ※
a a
步3
b
c
步3
a
步3
b
步4
d
步6
e
步8
f
步4
d
步5
e
步6
f
步4
c
步5
g
步7
h
步9
i
步7
步8
g
步9
步5
d
步10
j
步10
h
顺序功能图的基本规则
转换实现的条件 (1)该转换所有的前级步都是活动步 (2)相应的转换条件得到满足
转换实现应完成的操作
(1)使所有由有向连线与相应转换符号相连的后续步都 应变为“活动步”; (2)使得所有有向连线与相应转换符号相连的前级步都 变为“不活动步”。
步进顺控指令说明及应用

第三章步进顺控指令说明及应用指令解说步进控制方式(STL)是将控制被划分为多个工序状态(S),依据条件进行状态转移(SET ),逐步完成控制过程。
步进控制方式的特点是将复杂控制分步后,分别考虑好每一步的控制,从而降低了各步的关联,降低编程的复杂程度。
各状态内执行的动作由梯形图其它指令编写。
STL是一个步序动作的开始指令。
RET是一个步序动作的结束指令,其后指令返回母线。
●SET S i 是STL状态发生转移的唯一指令●规定:子程序内不能使用STL----RET指令。
●当前状态(S0)向下一个状态(S1)转移时,该扫描周期两个状态内的动作均得到执行;下一扫描周期执行时,当前状态(S0)被下一状态(S1)所复位,当前状态(S0)内的所有动作不被执行,所有OUT元件的输入均被断开。
●步序与步序之间一般省去RET,因此看起来是多个STL可共用一个RET。
有STL而没有RET,程序检查出错。
3.1.2 编程示例●步序与步序之间一般省去RET,因此看起来是多个STL可共用一个RET。
有STL而没有RET,程序检查出错。
●状态转移只能用SET指令,不能用OUT指令。
●使用OUT S时,S作为辅助继电器使用,而不是状态寄存器。
●时间继电器T可重复使用,但相邻两个状态不能重复使用同一时间继电器。
●两个矛盾继电器输出时,必需加软件互锁。
考虑软件快于硬件,相矛盾的硬件输出也必需互锁。
●允许同一继电器在不同状态下输出,其实际输出视状态转移的位置确定。
单一流程示例示例说明:该程序描述一个自行葫芦自进入工位到走出工位的步序过程,若在葫芦升降过程中发生停电,来电后继续停电前的动作,并保证升或降动作总时间不变。
S500---S503为停电保持型状态寄存器;C100---C101为停电保持型计数器;T0延时2秒,作信号确认用;T1作为500 ms脉冲发生器;X0=ON时,表示工位上停有自行葫芦;T0=ON时,表明工位上无自行葫芦;因信号由滑触线供给,因而X0=OFF时,不一定确定工位无车,需延时确认。
《STL步进指令运用》课件

迭代器的作用
迭代器用于访问和遍历容器中 的元素,实现了数据与算法的 分离。
函数对象的调用
函数对象作为算法的参数,用 于定义对容器中元素的具体操 作。
STL步进指令的应用场景
数据结构处理
STL步进指令可用于处理各种数据结构,如数 组、链表和树等。
性能优化
STL步进指令提供了高效的实现方式,能够大 幅提升程序的执行效率。
作用:
STL步进指令使程序员能够 更轻松地编写可重用、可 维护的代码。
STL步进指令的基本语法
1
包含头文件
#include <algorithm>
指定命名空间
2
using namespace std;
3
声明容器
vector<int> numbers;
STL步进指令的运行原理
容器与算法的协作
容器提供数据存储,算法对数 据进行操作和处理。
STL步进指令的使用技巧
1
选择适当的容器
根据需求和数据特点选择合适的容器
熟悉常用算法
2
类型,如vecto r、list或set等。
掌握常用的算法,如排序、查找、插
入和删除等,并根据具体情况灵活选
择使用。
3
定制函数对象
根据实际需求定义自己的函数对象, 以满足特定的业务逻辑。
结论和总结
STL步进指令是C++编程中强大而重要的工具,通过学习和运用,可以提高代码的效率、可读性和可维护 性。掌握STL步进指令,让我们的代码更加简洁高效,开发效率更高。
《STL步进指令运用》PPT 课件
本课件将介绍STL步进指令的基本语法、运行原理、应用场景、优点和局限性, 以及使用技巧。通过详细讲解,帮助大家更好地理解和运用这一重要的是一种在C++ 标准库中定义的功能强大 的容器模板。
PLC程序使用STL指令编程方式及方法详解培训学习课件PPT94页
(a)
(b)
使用步进指令需要说明的问题
5. 在不同的步进段,允许有重号的输出(注意:状态号不能重复 使用)。如图(a)所示,表示Y2在S20和S21两个步进段都接 通,它与图(b)等效。
SET M0 RST M8
C0 K5
4. 仿STL指令的编程方式
驱动处理
S21
X1
S22
Y0 转换条件
转换目标
驱动处理
S21
Y0
X1
SET S22
转换条件
转换目标
Mi-1
Xi
Mi
Y0
Xi+1 Mi+1
Mi
Y0
Xi+1
RST SET
Mi-1 Mi+1
4. 仿STL指令的编程方式
X2 X4 X3
M8002
M4 X0
Y11 Y12 快进
Y10 Y11 工进1
Y11
工进2
Y12 Y13 快退
M8002
M0
X4
M1
X1
M2
X2
M3
X3
M4
X0
M1 M2 M3 M1 M4 M2
M4
SET M0 SET M1 RST M0 SET M2 RST M1 SET M3 RST M2 SET M4 RST M3 SET M0 RST M4
SET M5 RST M4 SET M7 RST M6 SET M8 RST M5 RST M7 SET M0 RST M8
步进顺控指令及应用
X1 SET S22
S22 Y2
S31 Y11
X11 SET S32
S32 Y12
S41 Y21
X21 SET S42
S42 Y22
S22
X3
SET S50
S32
X13
SET S50
S42
X23
SET S50
S50 Y3
X4 S0
RET
END
5.2.4 并行分支与汇合的编程
1.并行分支状态转移图的特点
S21 Y1 X2
S22 Y2 X3
S31 Y11 X12
S32 Y12 X13
S41 Y21 X22
S42 Y22 X23
S50 Y3
(a)选择性汇合状态
STL OUT LD SET STL OUT STL OUT LD SET STL OUT STL OUT LD
S21 第一分支
SET S42
Y1 汇合前处理 STL S42
5.1.2 状态转移图SFC
(二)状态转移图
S0
X0 Y1 S20
X2 Y0 S21
X1 S22
T0 Y1 S23
X3 Y0 S24
X1
Y0
前进
Y1
后退
T0
延时
K100
Y0
前进
Y1
后退
每个工序当作一种状态! 初始状态---准备 S0~S9 中间状态----工序1到5, S20~S499 状态转换的条件----行程开关
5.2 状态转移图的编程方法
4.2.2 SFC编程注意事项
1)状态编程顺序:先驱动后转移,即先执行任务, 再进行状态转移,顺序不能颠倒。
2)STL步进接点指令具有建立子母线的功能,但并 不是所有的基本指令都能在STL接点后使用,见下表。
使用STL指令的PLC顺序控制编程方法

前器季 暂停 崩国坷圊 反转
sTL指令的出现意味着当前 sTL程序区的结束和新的
图l sTL指夸
sTL程序区的开始。各sTL触点驱动的电路一般放在一起,
最后一个s1L电路结束时一定要使用唧指令。RET指令
意味着最后一个sTL程序区的结束,LD点返回左侧母线。 pl:怎样对单序列蝙程? 答:旋转工作台用凸轮和限位开关来实现运动控制(见
条件同时满足。此时置位指令将后续步s21变为活动步,同
时系统程序自动地将s20复位为不活动步。需要从某一步返 回初始步时,可对初始步对
应的状态继电器使用0uT指 令或sET指令。
问.RET指争有什盖作 Jfl o
l|
正转
与sn,触点相连的触点 应使用LD或LDI指令,即LD 点移到sTL触点的右侧,该 点成为临时母线。下一条
然后压钳下行。压紧板 料后,压力继电器x4为
1状态,压钳保持压紧,剪刀开始下行。剪断扳料后,x2变
为1状态。为了提高效率,压钳和剪7J同时上行。它们分别
碰到限位开关x0和x1后,分别停止上行,均停止后,又开
始下一周期的工作。剪完lO块料后停止工作,并停留在初始
状态。
系统的顺序功能图和梯形图如图4所示,步s0是初始
问:为什幺使用sTL指令时允许双线圈电路7 答:由于cPu只执行活动步对应的sTL电路块,使用 s1L指令时允许双线圈输出,印不同的s下L触点可以分别驱 动同一编程元件的一个线圈。 问:怎样对选择序列骗程?
板料 .
作过程如n首先板料
万z72727zi广r气)(3 右行至限位开关x3处,
图3剪板机示意图
问 怎样对并行序列编程? 图4中分别由s23、s24和s25、s26组成的两个单序列 是并行工作的,设计梯形图时应保证这两个序列同时开始工 作和同时结束,即两个序列的第一步s23和s25应同时变为 括动步,两个序列的最后一步s24和s26应同时变为不活动 步。并行序列的分支的处理很简单,在图4中,当步s22是 活动步,并且转换条件x2满足时,步s23和s25同时变为活 动步。在梯形图中,当s22的sTL触点和x2的常开触点均 接通时,s23和s25被两条sET指令同时置位,系统程序将 前级步s22复位为不括动步。步s24、s26是等待步,用来同 时结束两个并行序列。图4中水平双线之下的转换条件“=r 表示转换条件总是满足的,即只要步s24、s26都是活动步, 就会发生步s24,s26到步s27的转换.步s24、s26变为不 活动步,步s27变为活动步。在梯形图中,用s24、s26的sTL 触点组成的串联电路使s27置位。如果不涉及并行序列的合 并,同一状态继电器的sTL触点只能在梯形图中使用~次, 并且只能作为电路的起始触点。串联的sTL触点的个数不能
PLC应用技术第4章 步进顺控指令的应用
X0 Y0 S20
X1 X2 X3 S21 S22 S23
S20
Y0
STL
X1
SET S21
X2
SET S22
X3
SET S23
STL S20
OUT Y0
LD
X1
SET S21
LD
X2
SET S22
LD
X3
SET S23
(a)顺序功能图
(b)梯形图
图4-2 选择序 列分支的编程方法示例
(c)指令表
(2)选择序列合并的编程方法
如果某一步的后面有N条选择序列的分支,则该步的STL触点开始的电路中应有N条 分别指明各转换条件和转换目标的并联电路。对于图4-2 中步S20之后的这三条支路有 三个转换条件X1、X2和X3,可能进入步S21、S22和步S23,所以在S20的STL触点开 始的电路块中,有三条由X1、X2和X3作为置位条件的串联电路。STL触点具有与主控 指令(MC)相同的特点,即LD点移到了STL触点的右端,对于选择序列分支对应的 电路的设计,是很方便的。用STL指令设计复杂系统的梯形图时更能体现其优越性。
SFC图便于阅读,也便于设计。SFC图也可以用STL 图(步进梯形图)来表示,如图4-1(b)所示,状 态步的线圈要用SET指令。其主控接点用STL指令, 主控接点右边为副母线。在SFC图结束后要用RET 指令,图4-1(c)所示为图4-1(a)和图4-1(b) 的指令程序。
PLC步进顺控指令的应用

PLC步进顺控指令的应用-1虽然该类的题目见的很多,可是好象讲清楚的并没见到。
就是本人来讲,也是看了很久都无法清楚。
故才下决心搞懂它。
差不多花了一天多时间才明白它的道理,它并不复杂,而且很好画梯形图和编程。
顺控实际是按照生产工艺要求而规定的一定操作顺序而已。
首先要根据生产工艺要求,画出顺序功能图,然后根据功能图再画出梯形图。
上图即为顺序功能图:图中双框S0表示为初始步,单框中的S20、S21、S22、S23依次根据工艺顺序要求而设置的各活动步。
我们来看S0初始步上方垂线上设有M8002其为初始步激活的条件(该步的意思不妨可以理解为自动合上空开?),在S0步与S20步之间有X1、X3,它说明只有符合这二条件要求后,步才能从S0步转移到S20步,而当S20步处于活动状态时Y002、T0处于动作状态。
而S20步与S21步之间的T0,它受时间控制,只要时间一到,S21步被激活投入,使Y001处于工作,同时S20步则处于关闭(其控制的Y002、T0则停止)以下各步中的X2、T1、X1含意均同(均为转换条件),但要注意下一步被激活,其相应控制元件则动作,意味着上一步被停止。
而各步之间均插入了X4其箭头均指向初始步S0,即恢复处于初始状态,X4在这地方的作用是急停。
而步S23下的X1条件一符合,可转入步S20,即处于循环状态。
根据顺序功能图就可很方便地将它转换成梯形图。
梯形图如上图所示,其工作过程如下:第一梯级中的0、LD M8002:M8002为特殊辅助继电器的常开触点,其作用仅在PLC通电瞬间接通。
1、SET S0: SET为置位指令,功能是驱动线圈,并使其具有自保功能。
也就是说在PLC通电的瞬间M8002产生一脉冲,将状态元件S0激活(并自保持)。
第二梯级中最左侧的3、STL S0:STL为步进触点指令,功能为步进触点驱动,当上一步(1、SET S0)为置位时该接点闭合,4、LD X001为小车停止位置的必要条件,也就是说小车开始时必须停在X1位置(该接点才能闭合),此时按外部的按钮(SB1)从而驱动(5、AND X003)的闭合,程序才能执行,这就是所说的条件。
西门子PLC使用STL指令的编程方法
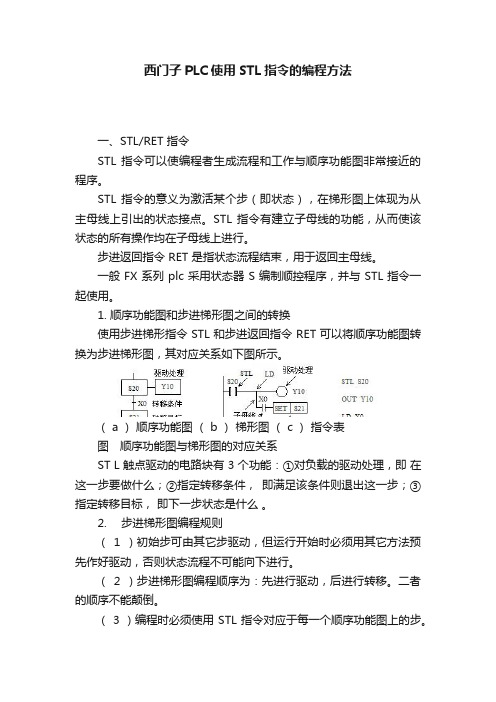
西门子PLC使用STL指令的编程方法一、STL/RET 指令STL 指令可以使编程者生成流程和工作与顺序功能图非常接近的程序。
STL 指令的意义为激活某个步(即状态),在梯形图上体现为从主母线上引出的状态接点。
STL 指令有建立子母线的功能,从而使该状态的所有操作均在子母线上进行。
步进返回指令 RET 是指状态流程结束,用于返回主母线。
一般 FX 系列 plc 采用状态器 S 编制顺控程序,并与 STL 指令一起使用。
1. 顺序功能图和步进梯形图之间的转换使用步进梯形指令 STL 和步进返回指令 RET 可以将顺序功能图转换为步进梯形图,其对应关系如下图所示。
( a )顺序功能图( b )梯形图( c )指令表图顺序功能图与梯形图的对应关系ST L 触点驱动的电路块有 3 个功能:①对负载的驱动处理,即在这一步要做什么;②指定转移条件,即满足该条件则退出这一步;③指定转移目标,即下一步状态是什么。
2. 步进梯形图编程规则(1 )初始步可由其它步驱动,但运行开始时必须用其它方法预先作好驱动,否则状态流程不可能向下进行。
(2 )步进梯形图编程顺序为:先进行驱动,后进行转移。
二者的顺序不能颠倒。
( 3 )编程时必须使用 STL 指令对应于每一个顺序功能图上的步。
( 4 )各 STL 触点的驱动电路一般放在一起,最后一个 STL 电路结束时,一定要使用步进返回指令 RET 使其返回主母线。
( 5 ) STL 触点可以直接驱动也可以通过别的触点驱动,如 Y 、M 、 S 、 T 、 C 等元件的线圈和应用指令。
( 6 )驱动负载使用 OUT 指令,当同一负载需要连续多步驱动时可使用多重输出,也可使用SET 指令将负载置位,等到负载不需要驱动时再用 RST 指令将其复位。
( 7 )由于 CPU 只执行活动步对应的电路块,因此使用 STL 指令时允许“双线圈”输出,即不同的STL 触点可以分别驱动同一编程元件的一个线圈。
步进阶梯应用
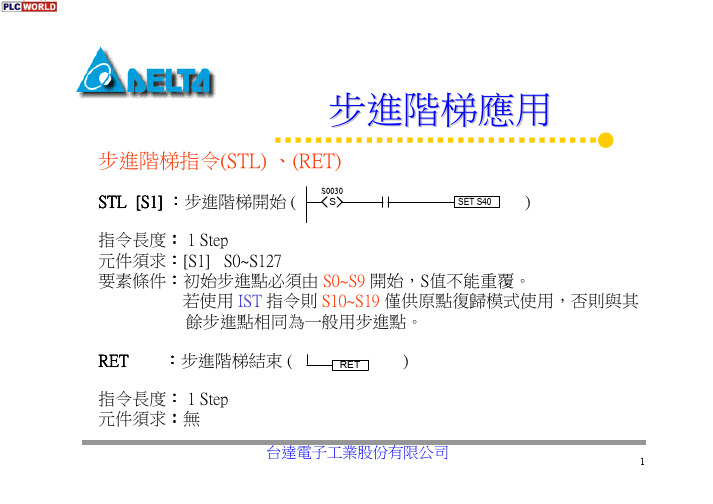
台達電子工業股份有限公司步進階梯應用指令說明︰•步進階梯指令STL指令、元件S 構成一個步進點,當STL 指令出現在程式中代表程式進入以步進流程控制的步進階梯狀態。
•步進階梯指令RET 則代表步進階梯狀態結束。
限制:•STL 指令不可使用於一般副程式內及中斷插入副程式內。
•STL 指令中不可使用MC/MCR指令。
•步進點後不可緊接使用MPS/MRD/MPP 指令,必須先有LD 或LDI 指令之後再使用MPS/MRD/MPP指令。
(此狀況會發生在指令編輯模式)台達電子工業股份有限公司步進階梯應用步進點移轉方法:步進點內使用SET 或OUT 指令都是用來啟動另一個步進點,功能動作類似,當控制權移動到另一個步進點後,步進點本身會變為OFF。
但兩者之間有些差異,底下是兩者之用法。
SET 指令用來驅動1.同一流程下一個步進點。
2.同一流程返回初始步進點。
OUT 指令用來驅動1. 分離步進點(不同一流程)。
2. 同一流程跳躍步進點(向上或向下)。
3. 同一流程並進合流步進點。
若同時符合OUT 驅動與SET 驅動條件時,以OUT 驅動為優先。
台達電子工業股份有限公司步進階梯應用複數流程:包含並進分歧,選擇分歧,並進合流,選擇合流等流程。
複雜流程:1. 選擇性分歧、選擇性合流流程。
2. 選擇性分歧、並進性合流流程。
3. 並進性分歧、並進性合流流程。
4. 並進性分歧、選擇性合流流程。
分歧流程的限制:1. 一個分歧流程所使用的分歧步進點最多8 個。
2. 複數個分歧流程或並進流程合在同一個流程裏最多可使用16 個回路。
3. 流程中的某一步進點可指定跳到別流程的任一個步進點。
步進階梯應用IST 指令控制初始步進點S0 ~ S2。
手動:S0:手動操作模式專用步進點S1:原點復歸模式專用步進點( S10 ~ S19僅供原點復歸模式使用)自動:S2:步進/一次循環/連續運轉模式專用步進點台達電子工業股份有限公司步進階梯應用IST指令相關之特殊輔助繼電器( M ) :【M1040】:步進點移動禁止。
使用STL指令的编程方法
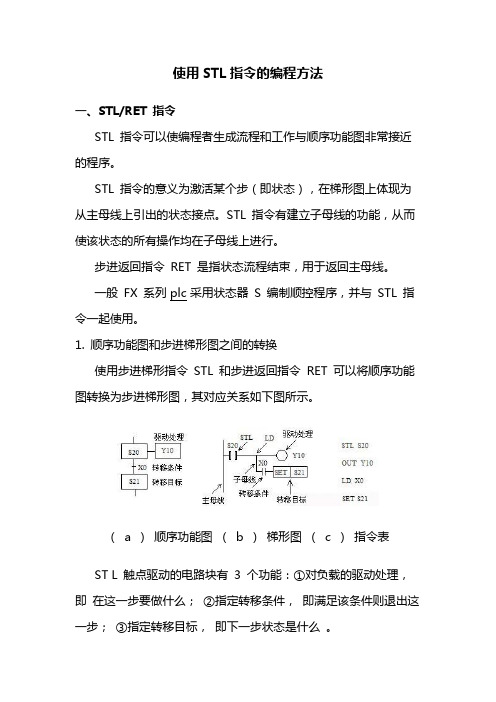
使用STL指令的编程方法一、STL/RET 指令STL 指令可以使编程者生成流程和工作与顺序功能图非常接近的程序。
STL 指令的意义为激活某个步(即状态),在梯形图上体现为从主母线上引出的状态接点。
STL 指令有建立子母线的功能,从而使该状态的所有操作均在子母线上进行。
步进返回指令RET 是指状态流程结束,用于返回主母线。
一般FX 系列 plc 采用状态器S 编制顺控程序,并与STL 指令一起使用。
1. 顺序功能图和步进梯形图之间的转换使用步进梯形指令STL 和步进返回指令RET 可以将顺序功能图转换为步进梯形图,其对应关系如下图所示。
(a )顺序功能图(b )梯形图(c )指令表ST L 触点驱动的电路块有3 个功能:①对负载的驱动处理,即在这一步要做什么;②指定转移条件,即满足该条件则退出这一步;③指定转移目标,即下一步状态是什么。
2. 步进梯形图编程规则(1 )初始步可由其它步驱动,但运行开始时必须用其它方法预先作好驱动,否则状态流程不可能向下进行。
(2 )步进梯形图编程顺序为:先进行驱动,后进行转移。
二者的顺序不能颠倒。
(3 )编程时必须使用STL 指令对应于每一个顺序功能图上的步。
(4 )各STL 触点的驱动电路一般放在一起,最后一个STL 电路结束时,一定要使用步进返回指令RET 使其返回主母线。
(5 )STL 触点可以直接驱动也可以通过别的触点驱动,如Y 、M 、S 、T 、C 等元件的线圈和应用指令。
(6 )驱动负载使用OUT 指令,当同一负载需要连续多步驱动时可使用多重输出,也可使用SET 指令将负载置位,等到负载不需要驱动时再用RST 指令将其复位。
(7 )由于CPU 只执行活动步对应的电路块,因此使用STL 指令时允许“双线圈”输出,即不同的STL 触点可以分别驱动同一编程元件的一个线圈。
(8 )与STL 触点相连的触点使用LD 或LDI 指令。
(9 )在步的活动状态的转移过程中,相邻两步的状态器会同时ON 一个扫描周期,此时可能会引发瞬时的双线圈问题。
三菱FX系列PLC的步进指令

三菱FX系列PLC的步进指令1.步进指令(STL/RET)步进指令是专为顺序控制而设计的指令。
在工业控制领域许多的控制过程都可用顺序控制的方式来实现,使用步进指令实现顺序控制既方便实现又便于阅读修改。
FX2N中有两条步进指令:STL(步进触点指令)和RET(步进返回指令)。
STL和RET指令只有与状态器S配合才能具有步进功能。
如STL S200表示状态常开触点,称为STL触点,它在梯形图中的符号为,它没有常闭触点。
我们用每个状态器S记录一个工步,例STL S200有效(为ON),则进入S200表示的一步(类似于本步的总开关),开始执行本阶段该做的工作,并判断进入下一步的条件是否满足。
一旦结束本步信号为ON,则关断S200进入下一步,如S201步。
RET指令是用来复位STL指令的。
执行RET后将重回母线,退出步进状态。
2.状态转移图一个顺序控制过程可分为若干个阶段,也称为步或状态,每个状态都有不同的动作。
当相邻两状态之间的转换条件得到满足时,就将实现转换,即由上一个状态转换到下一个状态执行。
我们常用状态转移图(功能表图)描述这种顺序控制过程。
如图1所示,用状态器S记录每个状态,X为转换条件。
如当X1为ON时,则系统由S20状态转为S21状态。
图1 状态转移图与步进指令状态转移图中的每一步包含三个内容:本步驱动的内容,转移条件及指令的转换目标。
如图3-25中S20步驱动Y0,当X1有效为ON时,则系统由S20状态转为S21状态,X1即为转换条件,转换的目标为S21步。
状态转移图与梯形图的对称关系也显示在图4-14中。
3.步进指令的使用说明1)STL触点是与左侧母线相连的常开触点,某STL触点接通,则对应的状态为活动步;2)与STL触点相连的触点应用LD或LDI指令,只有执行完RET后才返回左侧母线;3)STL触点可直接驱动或通过别的触点驱动Y、M、S、T等元件的线圈;4)由于plc只执行活动步对应的电路块,所以使用STL指令时允许双线圈输出(顺控程序在不同的步可多次驱动同一线圈);5) STL触点驱动的电路块中不能使用MC和MCR指令,但可以用CJ指令;6)在中断程序和子程序内,不能使用STL指令。