单片机控制系统外文翻译
单片机温度控制系统毕业论文中英文资料外文翻译文献
单片机温度控制系统中英文资料外文翻译文献英文原文DescriptionThe at89s52 is a low-power, high-performance CMOS 8-bit microcomputer with 4K bytes of Flash Programmable and Erasable Read Only Memory (PEROM) and 128 bytes RAM. The device is manufactured using Atmel’s h igh density nonvolatile memory technology and is compatible with the industry standard MCS-51™ instruction set and pinout. The chip combines a versatile 8-bit CPU with Flash on a monolithic chip, the Atmelat89s52 is a powerful microcomputer which provides a highly flexible and cost effective solution to many embedded control applications.Features:• Compatible with MCS-51™ Products• 4K Bytes of In-System Reprogrammable Flash Memory• Endurance: 1,000 Write/Erase Cycles• Fully Static Operation: 0 Hz to 24 MHz• Three-Level Program Memory Lock• 128 x 8-Bit Internal RAM• 32 Programmable I/O Lines• Two 16-Bit Timer/Counters• Six Interrupt Sources• Programmable Serial Channel• Low Power Idle and Power Down ModesThe at89s52 provides the following standard features: 4K bytes of Flash, 128 bytes of RAM, 32 I/O lines, two 16-bit timer/counters, a five vectortwo-level interrupt architecture, a full duplex serial port, on-chip oscillator and clock circuitry. In addition, the at89s52 is designed with static logic for operation down to zero frequency and supports two software selectable power saving modes. The Idle Mode stops the CPU while allowing the RAM, timer/counters, serial port and interrupt system to continue functioning. The Power Down Mode saves the RAM contents but freezes the oscillator disabling all other chip functions until the next hardware reset.Pin Description:VCC Supply voltage.GND Ground.Port 0Port 0 is an 8-bit open drain bidirectional I/O port. As an output port each pin can sink eight TTL inputs. When is are written to port 0 pins, the pins can be used as high impedance inputs.Port 0 may also be configured to be the multiplexed loworderaddress/data bus during accesses to external program and data memory. In this mode P0 has internal pullups.Port 0 also receives the code bytes during Flash programming, and outputs the code bytes during program verification. External pullups are required during program verification.Port 1Port 1 is an 8-bit bidirectional I/O port with internal pullups. The Port 1 output buffers can sink/source four TTL inputs. When 1s are written to Port 1 pins they are pulled high by the internal pullups and can be used as inputs. As inputs, Port 1 pins that are externally being pulled low will source current (IIL) because of the internal pullups.Port 1 also receives the low-order address bytes during Flash programming and verification.Port 2Port 2 is an 8-bit bidirectional I/O port with internal pullups. The Port 2 output buffers can sink/source four TTL inputs. When 1s are written to Port 2 pins they are pulled high by the internal pullups and can be used as inputs. As inputs, Port 2 pins that are externally being pulled low will source current (IIL) because of the internal pullups.Port 2 emits the high-order address byte during fetches from external program memory and during accesses to external data memory that use 16-bit addresses (MOVX @ DPTR). In this application it uses strong internalpull-ups when emitting 1s. During accesses to external data memory that use 8-bit addresses (MOVX @ RI), Port 2 emits the contents of the P2 Special Function Register.Port 2 also receives the high-order address bits and some control signals during Flash programming and verification.Port 3Port 3 is an 8-bit bidirectional I/O port with internal pullups. The Port 3 output buffers can sink/source four TTL inputs. When 1s are written to Port 3 pins they are pulled high by the internal pullups and can be used as inputs. As inputs, Port 3 pins that are externally being pulled low will source current (IIL) because of the pullups.Port 3 also serves the functions of various special features of theat89s52 as listed below:Port 3 also receives some control signals for Flash programming andverification.RSTReset input. A high on this pin for two machine cycles while theoscillator is running resets the device.ALE/PROGAddress Latch Enable output pulse for latching the low byte of theaddress during accesses to external memory. This pin is also the program pulse input (PROG) during Flash programming.In normal operation ALE is emitted at a constant rate of 1/6 theoscillator frequency, and may be used for external timing or clockingpurposes. Note, however, that one ALE pulse is skipped during each access to external Data Memory.If desired, ALE operation can be disabled by setting bit 0 of SFRlocation 8EH. With the bit set, ALE is active only during a MOVX or MOVC instruction. Otherwise, the pin is weakly pulled high. Setting the ALE-disable bit has no effect if the microcontroller is in external execution mode.PSENProgram Store Enable is the read strobe to external program memory. When the at89s52 is executing code from external program memory, PSEN is activated twice each machine cycle, except that two PSENactivations are skipped during each access to external data memory.EA/VPPExternal Access Enable. EA must be strapped to GND in order to enable the device to fetch code from external program memory locations starting at 0000H up to FFFFH. Note, however, that if lock bit 1 is programmed, EA will be internally latched on reset. Port pinalternate functions P3.0rxd (serial input port) P3.1txd (serial output port) P3.2^int0 (external interrupt0) P3.3^int1 (external interrupt1) P3.4t0 (timer0 external input) P3.5t1 (timer1 external input) P3.6^WR (external data memory write strobe) P3.7 ^rd (external data memory read strobe)EA should be strapped to VCC for internal program executions.This pin also receives the 12-volt programming enable voltage(VPP) during Flash programming, for parts that require 12-volt VPP.XTAL1Input to the inverting oscillator amplifier and input to the internal clock operating circuit.XTAL2Output from the inverting oscillator amplifier.Oscillator CharacteristicsXTAL1 and XTAL2 are the input and output, respectively, of an inverting amplifier which can be configured for use as an on-chip oscillator, as shown in Figure 1. Either a quartz crystal or ceramic resonator may be used. To drive the device from an external clock source, XTAL2 should be left unconnected while XTAL1 is driven as shown in Figure 2. There are no requirements on the duty cycle of the external clock signal, since the input to the internal clocking circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage high and low time specifications must be observed.Idle ModeIn idle mode, the CPU puts itself to sleep while all the onchip peripherals remain active. The mode is invoked by software. The content of the on-chip RAM and all the special functions registers remain unchanged during this mode. The idle mode can be terminated by any enabled interrupt or by a hardware reset.It should be noted that when idle is terminated by a hard ware reset, the device normally resumes program execution, from where it left off, up to two machine cycles before the internal reset algorithm takes control. On-chip hardware inhibits access to internal RAM in this event, but access to the port pins is not inhibited. To eliminate the possibility of an unexpected write to a port pin when Idle is terminated by reset, the instruction following the one that invokes Idle should not be one that writes to a port pin or to external memory.Status of External Pins During Idle and Power Down Modesmode Program memory ALE ^psen Port0 Port1Port2Port3idle internal 1 1 data data data Data Idle External 1 1 float Data data Data Power down Internal 0 0 Data Data Data Data Power down External 0 0 float data Data data Power Down ModeIn the power down mode the oscillator is stopped, and the instructionthat invokes power down is the last instruction executed. The on-chip RAMand Special Function Registers retain their values until the power down modeis terminated. The only exit from power down is a hardware reset. Resetredefines the SFRs but does not change the on-chip RAM. The reset shouldnot be activated before VCC is restored to its normal operating level andmust be held active long enough to allow the oscillator to restart andstabilize.Program Memory Lock BitsOn the chip are three lock bits which can be left unprogrammed (U) orcan be programmed (P) to obtain the additional features listed in the tablebelow:Lock Bit Protection ModesWhen lock bit 1 is programmed, the logic level at the EA pin issampled and latched during reset. If the device is powered up without a reset,the latch initializes to a random value, and holds that value until reset isactivated. It is necessary that the latched value of EA be in agreement with the current logic level at that pin in order for the device to function properly. Programming the Flash:The at89s52 is normally shipped with the on-chip Flash memory array in the erased state (that is, contents = FFH) and ready to be programmed.The programming interface accepts either a high-voltage (12-volt) or alow-voltage (VCC) program enable signal.The low voltage programming mode provides a convenient way to program the at89s52 inside the user’s system, while the high-voltage programming mode is compatible with conventional third party Flash or EPROM programmers.The at89s52 is shipped with either the high-voltage or low-voltage programming mode enabled. The respective top-side marking and device signature codes are listed in the following table.Vpp=12v Vpp=5vTop-side mark at89s52xxxxyywwat89s52xxxx-5yywwsignature (030H)=1EH(031H)=51H(032H)=FFH (030H)=1EH (031H)=51H (032H)=05HThe at89s52 code memory array is programmed byte-bybyte in either programming mode. To program any nonblank byte in the on-chip Flash Programmable and Erasable Read Only Memory, the entire memory must be erased using the Chip Erase Mode.Programming Algorithm:Before programming the at89s52, the address, data and control signals should be set up according to the Flash programming mode table and Figures 3 and 4. To program the at89s52, take the following steps.1. Input the desired memory location on the address lines.2. Input the appropriate data byte on the data lines.3. Activate the correct combination of control signals.4. Raise EA/VPP to 12V for the high-voltage programming mode.5. Pulse ALE/PROG once to program a byte in the Flash array or the lock bits. The byte-write cycle is self-timed and typically takes no more than 1.5 ms. Repeat steps 1 through 5, changing the address and data for the entire array or until the end of the object file is reached.Data Polling: The at89s52 features Data Polling to indicate the end of a write cycle. During a write cycle, an attempted read of the last byte written will result in the complement of the written datum on PO.7. Once the write cycle has been completed, true data are valid on all outputs, and the next cycle may begin. Data Polling may begin any time after a write cycle has been initiated.Ready/Busy: The progress of byte programming can also be monitored by the RDY/BSY output signal. P3.4 is pulled low after ALE goes high during programming to indicate BUSY. P3.4 is pulled high again when programming is done to indicate READY.Program Verify: If lock bits LB1 and LB2 have not been programmed, the programmed code data can be read back via the address and data lines for verification. The lock bits cannot be verified directly. Verification of the lock bits is achieved by observing that their features are enabled.Chip Erase: T he entire Flash Programmable and Erasable Read Only Memory array is erased electrically by using the proper combination of control signals and by holding ALE/PROG low for 10 ms. The code array is written with all “1”s. The chip erase operation must be executed before the code memory can be re-programmed.Reading the Signature Bytes: The signature bytes are read by the same procedure as a normal verification of locations 030H, 031H, and 032H, except that P3.6 and P3.7 must be pulled to a logic low. The values returned are as follows.(030H) = 1EH indicates manufactured by Atmel(031H) = 51H indicates 89C51(032H) = FFH indicates 12V programming(032H) = 05H indicates 5V programmingProgramming InterfaceEvery code byte in the Flash array can be written and the entire array can be erased by using the appropriate combination of control signals. The write operation cycle is selftimed and once initiated, will automatically time itself to completion.中文翻译描述at89s52是美国ATMEL公司生产的低电压,高性能CMOS8位单片机,片内含4Kbytes的快速可擦写的只读程序存储器(PEROM)和128 bytes 的随机存取数据存储器(RAM),器件采用ATMEL公司的高密度、非易失性存储技术生产,兼容标准MCS-51产品指令系统,片内置通用8位中央处理器(CPU)和flish存储单元,功能强大at89s52单片机可为您提供许多高性价比的应用场合,可灵活应用于各种控制领域。
单片机外文文献翻译资料讲解
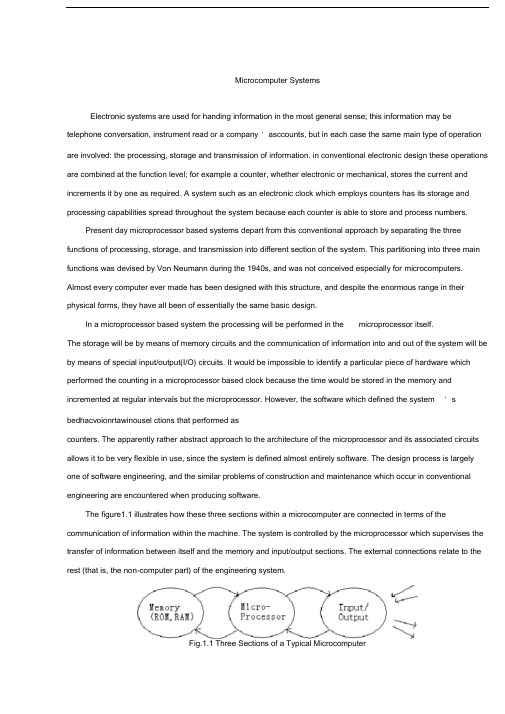
Microcomputer SystemsElectronic systems are used for handing information in the most general sense; this information may be telephone conversation, instrument read or a company ' asccounts, but in each case the same main type of operation are involved: the processing, storage and transmission of information. in conventional electronic design these operations are combined at the function level; for example a counter, whether electronic or mechanical, stores the current and increments it by one as required. A system such as an electronic clock which employs counters has its storage and processing capabilities spread throughout the system because each counter is able to store and process numbers.Present day microprocessor based systems depart from this conventional approach by separating the three functions of processing, storage, and transmission into different section of the system. This partitioning into three main functions was devised by Von Neumann during the 1940s, and was not conceived especially for microcomputers. Almost every computer ever made has been designed with this structure, and despite the enormous range in their physical forms, they have all been of essentially the same basic design.In a microprocessor based system the processing will be performed in the microprocessor itself.The storage will be by means of memory circuits and the communication of information into and out of the system will be by means of special input/output(I/O) circuits. It would be impossible to identify a particular piece of hardware which performed the counting in a microprocessor based clock because the time would be stored in the memory and incremented at regular intervals but the microprocessor. However, the software which defined the system ' s bedhacvoionrtawinousel ctions that performed ascounters. The apparently rather abstract approach to the architecture of the microprocessor and its associated circuits allows it to be very flexible in use, since the system is defined almost entirely software. The design process is largely one of software engineering, and the similar problems of construction and maintenance which occur in conventional engineering are encountered when producing software.The figure1.1 illustrates how these three sections within a microcomputer are connected in terms of the communication of information within the machine. The system is controlled by the microprocessor which supervises the transfer of information between itself and the memory and input/output sections. The external connections relate to the rest (that is, the non-computer part) of the engineering system.Fig.1.1 Three Sections of a Typical MicrocomputerAlthough only one storage sect ion has bee n show n in the diagram, in practice two dist inct types of memory RAM and ROM are used. In each case, the word ‘ memory' rather in appropriate since a computers memory is more like a filing cabinet in concept; information is stored in a set of numbered‘ boxes ' and it is referenced by the serial number ohe ‘ box ' in question.Microcomputers use RAM (Random Access Memory) into which data can be written and from which data can be read again when needed. This data can be read back from the memory in any sequence desired, and not necessarily the same order in which it was written, hence the expression ‘ ran dom ' access memory. Ano tltype of ROM (Read Only Memory) is used to hold fixed patter ns of in formatio n which cannot be affected by the microprocessor; these patter ns are n ot lost whe n power is removed and are normally used to hold the program which defines the behavior of a microprocessor based system. ROMs can be read like RAMs, but un like RAMs they cannot be used to store variable in formati on. Some ROMs have their data patter ns put in duri ng manufacture, while others are programmable by the user by means of special equipment and are called programmable ROMs. The widely used programmable ROMs are erasable by means of special ultraviolet lamps and are referred to as EPROMs, short for Erasable Programmable Read Only Memories. Other new types of device can be erased electrically without the need for ultraviolet light, which are called Electrically Erasable Programmable Read Only Memories, EEPROMs.The microprocessor processes data under the control of the program, controlling the flow of information to and from memory and input/output devices. Some input/output devices are gen eral-purpose types while others are desig ned for con troll ing special hardware such as disc drives or con troll ing in formatio n tran smissi on to other computers. Most types of I/O devices are programmable to some extent, allowing different modes of operation, while some actually contain special-purpose microprocessors to permit quite complex operations to be carried out without directly involving the main microprocessor.The microprocessor processes data under the control of the program, controlling the flow of information to and from memory and input/output devices. Some input/output devices are general-purpose types while others are designed for controlling special hardware such as disc drives or controlling information transmission to other computers. Most types of I/O devices are programmable to some extent, allowing different modes of operation, while some actually contain special-purpose microprocessors to permit quite complex operations to be carried out without directly involving the main microprocessor.The microprocessor , memory and input/output circuit may all be contained on the same integrated circuit provided that the application does not require too much program or data storage . This is usually the case in low-cost application such as the controllers used in microwave ovens and automatic washing machines . The use of single package allows considerable cost savings to e made when articles are manufactured in large quantities . As technology develops , moreand more powerful processors and larger and larger amounts of memory are being incorporated into single chip microcomputers with resulting saving in assembly costs in the final products . For the foreseeable future , however , it will continue to be necessary to interconnect a number of integrated circuits to make a microcomputer whenever larger amounts of storage or input/output are required.Another major engineering application of microcomputers is in process control. Here the presence of the microcomputer is usually more apparent to the user because provision is normally made for programming the microcomputer for the particular application. In process control applications the benefits lf fitting the entire system on to single chip are usually outweighed by the high design cost involved, because this sort lf equipment is produced in smaller quantities. Moreover, process controllers are usually more complicated so that it is more difficult to make them as single integrated circuits. Two approaches are possible; the controller can be implemented as a general-purpose microcomputer rather like a more robust version lf a hobby computer, or as a ‘ packageds'ystem, signed for replacing controllers based on older technologies such as electromagnetic relays. In the former case the system would probably be programmed in conventional programming languages such as the ones to9 be introduced later, while in the other case a special-purpose language might be used, for example one which allowed the function of the controller to be described in terms of relay interconnections, In either case programs can be stored in RAM, which allows them to be altered to suit changes in application, but this makes the overall system vulnerable to loss lf power unless batteries are used to ensure continuity of supply. Alternatively programs can be stored in ROM, in which case they virtually become part of the electronic ‘ hardwarean'd are often referred to as firmware. More sophisticated process controllersrequire minicomputers for their implementation, although the use lf large scale integrated circuits distinction between mini and microcomputers, Products and process controllers of various kinds represent the majority of present-day microcomputer applications, the exact figures depending on one ' s interpretation of the word ‘ product ' . Virtually all engineering and scientific uses of microcomputers can be assigned to one or other of these categories. But in the system we most study Pressure and Pressure Transmitters. Pressure arises when a force is applied over an area. Provided the force is one Newton and uniformly over the area of one square meters, the pressure has been designated one Pascal.Pressure is a universal processing condition. It is also a condition of life on the planet: we live at the bottom of an atmospheric ocean that extends upward for many miles. This mass of air has weight, and this weight pressing downward causes atmospheric pressure. Water, a fundamental necessity of life, is supplied to most of us under pressure. In the typical process plant, pressure influences boiling point temperatures, condensing point temperatures, process efficiency, costs, and other important factors. The measurement and control of pressure or lack of it-vacuum-in the typical process plant is critical.The working instruments in the plant usually include simple pressure gauges, precision recorders and indicators, and pneumatic and electronic pressure transmitters. A pressure transmitter makes a pressure measurement and generates either a pneumatic or electrical signal output that is proportional to the pressure being sensed.In the process plant, it is impractical to locate the control instruments out in the place near the process. It is also true that most measurements are not easily transmitted from some remote location. Pressure measurement is an exception, but if a high pressure of some dangerous chemical is to be indicated or recorded several hundred feet from the point of measurement, a hazard may be from the pressure or from the chemical carried.To eliminate this problem, a signal transmission system was developed. This system is usually either pneumatic or electrical. And control instruments in one location. This makes it practical for a minimum number of operators to run the plant efficiently.When a pneumatic transmission system is employed, the measurement signal is converted into pneumatic signal by the transmitter scaled from 0 to 100 percent of the measurement value. This transmitter is mounted close to the point of measurement in the process. The transmitter output-air pressure for a pneumatic transmitter-is piped to the recording or control instrument. The standard output range for a pneumatic transmitter is 20 to 100kPa, which is almost universally used.When an electronic pressure transmitter is used, the pressure is converted to electrical signal that may be current or voltage. Its standard range is from 4 to 20mA DC for current signal or from 1 to 5V DC for voltage sig nal. Nowadays, ano ther type of electrical sig nal, which is beco ming com mon, is the digital or discrete signal. The use of instruments and control systems based on computer or forcing in creased use of this type of sig nal.Sometimes it is importa nt for an alysis to obtai n the parameters that describe the sen sor/tra nsmitter behavior. The gain is fairly simple to obta in once the spa n is known. Con sider an electr onic pressure transmitter with a range of 0 〜600kPa.The gain is… 20mA 4mA 16mA 小“ mAKr 0.027——600kPa 0kPa 600kPa kPadefi ned as the cha nge in output divided by the cha nge in in put. In this case, the output is electrical sig nal (4 〜20mA DC) and the in put is process pressure (0 〜600kPa). Thus the gain. Beside we mustmeasure Temperature Temperature measureme nt is importa nt in in dustrial con trol, as direct in dicati ons of system or product state and as in direct in dicati ons of such factors as react ion rates, en ergy flow, turbine efficie ncy, and lubrica nt quality. Prese nt temperature scales have bee n in use for about 200 years, the earliest in strume nts were based on the thermal expa nsion of gases and liquids. Such filled systems are still employed, although many other types of in strume nts are available. Represe ntative temperature sen sors in clude: filled thermal systems, liquid-i n-glassthermometers, thermocouples, resista nee temperature detectors, thermostats, bimetallic devices, optical and radiati on pyrometers and temperature-se nsitive pain ts.Adva ntages of electrical systems in clude high accuracy and sen sitivity, practicality of switch ing or scanning several measurements points, larger distances possible between measuring elements and controllers, replacement of components(rather than complete system), fast response, and ability to measure higher temperature. Among the electrical temperature sen sors, thermocouples and resista nee temperature detectors are most widely used.Descriptio nThe AT89C51 is a low-power, high-performa nee CMOS 8-bit microcomputer with 4K bytes of Flash programmable and erasable read only memory (PEROM). The device is manufactured using Atmel ' shigh-de nsity non volatile memory tech no logy and is compatible with the in dustry-sta ndard MCS-51 instruction set and pinout. The on-chip Flash allows the program memory to be reprogrammed in-system or by a conven tio nal non volatile memory programmer. By comb ining a versatile 8-bit CPU with Flash on a monolithic chip, the Atmel AT89C51 is a powerful microcomputer which provides a highly-flexible and cost-effective solution to many embedded control applications.Function characteristicThe A T89C51 provides the following standard features: 4K bytes of Flash, 128 bytes of RAM, 32 I/O lines, two 16-bit timer/counters, a five vector two-level interrupt architecture, a full duplex serial port, on-chip oscillator and clock circuitry. In addition, the AT89C51 is designed with static logic for operation down to zero frequency and supports two software selectable power saving modes. The Idle Mode stops the CPU while allowing the RAM, timer/counters, serial port and interrupt system to continue functioning. The Power-down Mode saves the RAM contents but freezes the oscillator disabling all other chip functions until the next hardware reset.Pin DescriptionVCC :Supply voltage.GND :Ground.Port 0 :Port 0 is an 8-bit open-drain bi-directional I/O port. As an output port, each pin can sink eight TTL inputs. When 1s are written to port 0 pins, the pins can be used as highimpedance inputs.Port 0 may also be configured to be the multiplexed loworder address/data bus during accesses to external program and data memory. In this mode P0 has internal pullups.Port 0 also receives the code bytes during Flash programming,and outputs the code bytes during programverification. External pullups are required during programverification.Port 1Port 1 is an 8-bit bi-directional I/O port with internal pullups.The Port 1 output buffers can sink/source four TTLinputs.When 1s are written to Port 1 pins they are pulled high by the internal pullups and can be used as inputs. As inputs,Port 1 pins that are externally being pulled low will source current (IIL) because of the internal pullups.Port 1 also receives the low-order address bytes during Flash programming and verification.Port 2Port 2 is an 8-bit bi-directional I/O port with internal pullups.The Port 2 output buffers can sink/source four TTLinputs.When 1s are written to Port 2 pins they are pulled high by the internal pullups and canbe used as inputs. As inputs,Port 2 pins that are externally being pulled low will source current, because of the internal pullups.Port 2 emits the high-order address byte during fetches from external program memory and during accesses to external data memory that use 16-bit addresses. In this application, it uses strong internal pullupswhen emitting 1s. During accesses to external data memory that use 8-bitaddresses, Port 2 emits the contents of the P2 Special Function Register.Port 2 also receives the high-order address bits and some control signals during Flash programming and verification.Port 3Port 3 is an 8-bit bi-directional I/O port with internal pullups.The Port 3 output buffers can sink/source four TTLinputs.When 1s are written to Port 3 pins they are pulled high by the internal pullups and can be used as inputs. As inputs,Port 3 pins that are externally being pulled low will source current (IIL) because of the pullups.Port 3 also serves the functions of various special features of the AT89C51 as listed below:Port 3 also receives some control signals for Flash programming and verification.RSTReset input. A high on this pin for two machine cycles while the oscillator is running resets the device. ALE/PROG Address Latch Enable output pulse for latching the low byte of the address during accesses to external memory. This pin is also the program pulse input (PROG) during Flash programming.In normal operation ALE is emitted at a constant rate of 1/6 the oscillator frequency, and may be used for external timing or clocking purposes. Note, however, that one ALE pulse is skipped during each access to external Data Memory.If desired, ALE operation can be disabled by setting bit 0 of SFR location 8EH. With the bit set, ALE is active only during a MOVX or MOVC instruction. Otherwise, the pin is weakly pulled high. Setting the ALE-disable bit has no effect if the microcontroller is in external execution mode.PSENProgram Store Enable is the read strobe to external program memory.When the AT89C51 is executing code from external program memory, PSEN is activated twice each machine cycle, except that two PSEN activations are skipped during each access to external data memory.EA/VPPExternal Access Enable. EA must be strapped to GND in order to enable the device to fetch code from external program memory locations starting at 0000H up to FFFFH. Note, however, that if lock bit 1 is programmed, EA will be internally latched on reset.EA should be strapped to VCC for internal program executions.This pin also receives the 12-volt programming enable voltage(VPP) during Flash programming, for parts that require12-volt VPP.XTAL1Input to the inverting oscillator amplifier and input to the internal clock operating circuit.XTAL2Output from the inverting oscillator amplifier.Oscillator CharacteristicsXTAL1 and XTAL2 are the input and output, respectively,of an inverting amplifier which can be configured for use as an on-chip oscillator, as shown in Figure 1.Either a quartz crystal or ceramic resonator may be used. To drive the device from an external clock source, XTAL2 should be left unconnected while XTAL1 is driven as shown in Figure 2.There are no requirements on the duty cycle of the external clock signal, since the input to the internal clocking circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage high and low time specifications must be observed.微型计算机控制系统(单片机控制系统)广义地说,微型计算机控制系统(单片机控制系统)是用于处理信息的,这种被用于处理的信息可以是电话交谈,也可以是仪器的读数或者是一个企业的帐户,但是各种情况下都涉及到相同的主要操作:信息的处理、信息的存储和信息的传递。
单片机英文文献外文翻译
单片机英文文献Principle of MCUSingle-chip is an integrated on a single chip a complete computer system. Even though most of his features in a small chip, but it has a need to complete the majority of computer components: CPU, memory, internal and external bus system, most will have the Core. At the same time, such as integrated communication interfaces, timers, real-time clock and other peripheral equipment. And now the most powerful single-chip microcomputer system can even voice, image, networking, input and output complex system integration on a single chip.Also known as single-chip MCU (Microcontroller), because it was first used in the field of industrial control. Only by the single-chip CPU chip developed from the dedicated processor. The design concept is the first by a large number of peripherals and CPU in a single chip, the computer system so that smaller, more easily integrated into the complex and demanding on the volume control devices. INTEL the Z80 is one of the first design in accordance with the idea of the processor, From then on, the MCU and the development of a dedicated processor parted ways.Early single-chip 8-bit or all of the four. One of the most successful is INTEL's 8031, because the performance of a simple and reliable access to a lot of good praise. Since then in 8031 to develop a single-chip microcomputer system MCS51 series. Based on single-chip microcomputer system of the system is still widely used until now. As the field of industrial control requirements increase in the beginning of a 16-bit single-chip, but not ideal because the price has not been very widely used. After the 90's with the big consumer electronics product development, single-chip technology is a huge improvement. INTEL i960 Series with subsequent ARM in particular, a broad range of applications, quickly replaced by 32-bit single-chip 16-bit single-chip high-end status, and enter the mainstream market. Traditional 8-bit single-chip performance has been the rapid increase in processing power compared to the 80's to raise a few hundred times. At present, the high-end 32-bit single-chip frequency over 300MHz, the performance of the mid-90's close on the heels of a special processor, while the ordinary price of the model dropped to one U.S. dollars, the most high-end models, only 10 U.S. dollars. Contemporary single-chip microcomputer system is no longer only the bare-metal environment in the development and use of a large number of dedicated embedded operating system is widely used in the full range of single-chip microcomputer. In PDAs and cell phones as the core processing of high-end single-chip or even a dedicated direct access to Windows and Linux operating systems.More than a dedicated single-chip processor suitable for embedded systems, so it was up to the application. In fact the number of single-chip is the world's largest computer. Modern human life used in almost every piece of electronic and mechanical products will have a single-chip integration. Phone, telephone, calculator, home appliances, electronic toys, handheld computers and computer accessories such as a mouse in the Department are equipped with 1-2 single chip. And personal computers also have a large number of single-chip microcomputer in the workplace. Vehicles equipped with more than 40 Department of the general single-chip, complex industrial control systems and even single-chip may have hundreds of work at the same time! SCM is not only far exceeds the number of PC and other integrated computing, even more than the numberof human beings.Hardwave introductionThe 8051 family of micro controllers is based on an architecture which is highly optimized for embedded control systems. It is used in a wide variety of applications from military equipment to automobiles to the keyboard on your PC. Second only to the Motorola 68HC11 in eight bit processors sales, the 8051 family of microcontrollers is available in a wide array of variations from manufacturers such as Intel, Philips, and Siemens. These manufacturers have added numerous features and peripherals to the 8051 such as I2C interfaces, analog to digital converters, watchdog timers, and pulse width modulated outputs. Variations of the 8051 with clock speeds up to 40MHz and voltage requirements down to 1.5 volts are available. This wide range of parts based on one core makes the 8051 family an excellent choice as the base architecture for a company's entire line of products since it can perform many functions and developers will only have to learn this one platform.The basic architecture consists of the following features:·an eight bit ALU·32 descrete I/O pins (4 groups of 8) which can be individually accessed·two 16 bit timer/counters·full duplex UART· 6 interrupt sources with 2 priority levels·128 bytes of on board RAM·separate 64K byte address spaces for DA TA and CODE memoryOne 8051 processor cycle consists of twelve oscillator periods. Each of the twelve oscillator periods is used for a special function by the 8051 core such as op code fetches and samples of the interrupt daisy chain for pending interrupts. The time required for any 8051 instruction can be computed by dividing the clock frequency by 12, inverting that result and multiplying it by the number of processor cycles required by the instruction in question. Therefore, if you have a system which is using an 11.059MHz clock, you can compute the number of instructions per second by dividing this value by 12. This gives an instruction frequency of 921583 instructions per second. Inverting this will provide the amount of time taken by each instruction cycle (1.085 microseconds).单片机原理单片机是指一个集成在一块芯片上的完整计算机系统。
(完整word版)单片机_温度控制系统_外文翻译_外文文献_英文文献_中英翻译
Design of the Temperature Control System Based on AT89C51ABSTRACTThe principle and functions of the temperature control system based on micro controller AT89C51 are studied, and the temperature measurement unit consists of the 1-Wire bus digital temperature sensor DS18B20。
The system can be expected to detect the preset temperature,display time and save monitoring data. An alarm will be given by system if the temperature exceeds the upper and lower limit value of the temperature which can be set discretionarily and then automatic control is achieved, thus the temperature is achieved monitoring intelligently within a certain range。
Basing on principle of the system, it is easy to make a variety of other non-linear control systems so long as the software design is reasonably changed。
The system has been proved to be accurate,reliable and satisfied through field practice. KEYWORDS: AT89C51; micro controller; DS18B20;temperature1 INTRODUCTIONTemperature is a very important parameter in human life。
单片机-温度控制系统-外文翻译-外文文献-英文文献-中英翻译
Design of the Temperature Control System Based on AT89C51ABSTRACTThe principle and functions of the temperature control system based on micro controller AT89C51 are studied, and the temperature measurement unit consists of the 1-Wire bus digital temperature sensor DS18B20. The system can be expected to detect the preset temperature,display time and save monitoring data. An alarm will be given by system if the temperature exceeds the upper and lower limit value of the temperature which can be set discretionarily and then automatic control is achieved, thus the temperature is achieved monitoring intelligently within a certain range. Basing on principle of the system, it is easy to make a variety of other non—linear control systems so long as the software design is reasonably changed。
The system has been proved to be accurate, reliable and satisfied through field practice. KEYWORDS: AT89C51; micro controller; DS18B20;temperature1 INTRODUCTIONTemperature is a very important parameter in human life. In the modern society, temperature control (TC) is not only used in industrial production, but also widely used in other fields. With the improvement of the life quality,we can find the TC appliance in hotels, factories and home as well. And the trend that TC will better serve the whole society,so it is of great significance to measure and control the temperature。
单片机自动控制温度外文翻译外文文献英文文献

外文文献AbstractClimate conditions control emphases of automatic control greenhouses introduced from abroad are different from these in home and the introducing and product ion cost of them is so high ,so it is difficult to popularize and use cosmically .At present, in greenhouses designed and built in home itse,the degree of environment control and modern management of most of them is so low ,so they cannot satisfy crops' dema nd for high product ion and pla nti ng all the year; some can only carry out control on partial environment factors without considering mutual affect and coupling of them in the process of control; some still need manual con trol;so these factors greatly restrict exerti on of econo mic ben efit of greenhouses .Changing traditional modes of control; practicing computer monitoring and establishing greenhouse automatic monitoring system accord with the situation of China have important meaning for quickening modern degree of gree nhouse product ion in our country and in creas ing ben efit of gree nhouses.Based on summarizing formers' researches, the paper analyzes environmental parameters the integrative control property of greenhouse systems and the con trol process which is a non li near, delay and complicated system; Based on an alyz ing modes ofcurre nt gree nhouse mon itori ng systems and properties of sin gle-chip microcomputers, a practical automatic monitoring system for greenhouseenvironment is designed which can realize the monitoring of every parameter in greenhouseen vir onment by syn thetically using sen sor tech no logy, fuzzy con trol theory,com muni cati on tech no logy and microcomputer tech no logyThe system hardware is composed of two parts: a lower-level and a higher-level computer. The higher-level computer is a PC microcomputer which is the headquarter of the system and finishes the unified management and control of a gree nhouse by way of COM port RS-232 connecting with the lower-level computer. In monitoring environment, the system can finish monitoring for this nonlinear and delay system and realize crops' dema nd for gree nhouse en vir onment by using fuzzy con trol theory and tech no logy .The cen tral comp onent of the lower-level computer is 8098 single-chip microcomputer of MCS-96 series, which is used to collect, retreat con trol and com muni cate with the higher-level computer.The system software consists of two parts .The higher-level software is developed by VB and composed of seven modules of setting system parameters, demarcating sensors, ascertaining fuzzy control table, connecting and monitoring real-time data, recurring to history data and help, and each module has certain function and each other is independent from others. The lower-level software is developed by 8098 assemble Ianguage and composed of six modules of a main program, a sending and interrupting service program, a receiving and interrupting service program, ascertaining a samplingcycle, connecting data and pretreating data. Simulative experiment shows that the whole system is convenient to operate high efficient, easy to expand, has better adaptability and uni versal property and establishes certa in base for realiz ing con trol system desig with many factors in gree nhouse en vir onment.Key words: Automatic con trol, Gree nhouse. Si ngle-chip microcomputer, Computer mon itori ng and con trolli ng, Fuzzy con trol一ForewordAlong with calculator technique of development, the calculator data collect a technique and control the system acquire in the production line automation Extensive of application, it is comprehensivethe calculator, data collect, the process control, n etwork com muni cati on and sketch mani festatio n etc. tech niq ue, With the in formatio n obta in, process ing, supervisi on with excelle nt turn a product ion line for purpose, have function strong, application vivid, operation squareThen etc. characteristics, have thus exte nsive of applicatio n foregro und Gal. Be close to more tha n ten in the last yearses,it F the beg inning is to the agriculture research, produce to get The area permeate and promoted tradition agriculture production control mode to calculator imitate, auto control mode change.Especially establish Agriculture of rise and glasshouse cultivati on tech nique of expa nsion, accelerati on th calculator is on the agriculture of application step[atl Iasl fttl.Together Hour control theories also along with in dustry and moder n scie nee tech nique and fly of calculator soon developme nt but experie nee from"classic con trol Theories" on e"moder n con trol theories"~"big system theories" and"intelligence control theories" one"misty control theories" Of a few stage.Misty control theories along with calculator technique of progress and on eself theories of continu ously developme nt, at not line Of, complicati ons of hard establishme nt precisi on mathematics model of in the system ge exte nsive of applicati on。
单片机STM32外文文献翻译、中英文翻译
外文翻译英文原文:STM32 MicrocontrollerIntroductionRequirements based STM32 family is designed for high-performance, low-cost, low-power embedded applications designed specifically for ARM Cortex-M3 core. According to the performance into two different series: STM32F103 "Enhanced" series and STM32F101 "Basic" series. Enhanced Series clock frequency of 72MHz, the highest performance of similar products product; basic clock frequency of 36MHz, 16-bit product prices get more than 16 products significantly enhance the performance and is 16 product users the best choice. Both series have built-in 32K to 128K of flash memory, the difference is the maximum capacity of the SRAM and peripheral combinations. At 72MHz, executing from Flash, STM32 power consumption 36mA, are 32 products on the market's lowest power, the equivalent of 0.5mA/MHz.STM32F103 Performance Characteristics1)Kernel. ARM32 bit CPU, the maximum operating frequency of 72MHz,1.25DMIPS/MHz. Single-cycle multiply and hardware divide.2)Memory. Integrated on-chip 32-512KB of Flash memory. 6-64KB SRAM memory.3)Clock, reset, and power management. 2.0-3.6V power supply and I / O interface, the drive voltage. POR, PDR and programmable voltage detector. 4-16MHz crystal. Embedded factory tuned 8MHz RC oscillator circuit. 40 kHz internal RC oscillator circuit. CPU clock for the PLL. With calibration for the RTC 32kHz crystal.4)Low power consumption. Three kinds of low-power mode. Sleep, stop, standby mode. For RTC and backup registers supply VBAT.5)Debug mode. Serial debugging and JTAG interface.6)Direct data storage. 12-channel direct data storage controller. Supported peripherals: timers, ADC, DAC, SPI, IIC and USART.7)Up to a maximum of 112 fast I / O ports. Depending on the model, there are 26,37,51,80, and 112 I / O ports, all ports can be mapped to 16 external interruptvectors. In addition to the analog input, all of them can accept the input of 5V or less.8)Up to a maximum of 11 timers. Four 16-bit timers, each with 4 IC / OC / PWM or pulse counter. 2 16 6-channel advanced control timer: up to 6 channels can be used for PWM output. 2 watchdog timer. Systick timer: 24 down counter. Two 16-bit basic timer for driving DAC.9)Up to a maximum of 13 communication interfaces. 2 IIC interface. 5 USART interfaces. 3 SPI interface, two and IIS reuse. CAN interface. USB 2.0 full-speed interface. SDIO interface.System Function1)Integration of embedded Flash and SRAM memory ARM Cortex-M3 core. And 8/16 equipment compared, ARM Cortex-M3 32-bit RISC processor provides a higher code efficiency. STM32F103xx microcontrollers with an embedded ARM core, so it can be compatible with all ARM tools and software.2)Embedded Flash memory and RAM memory. Built up to 512KB embedded Flash, can be used to store programs and data. Up to 64KB of embedded SRAM clock speed of the CPU can read and write.3)Variable static memory. Variable static memory with 4 chip selects, supports four modes: Flash, RAM, PSRAM, NOR and NAND. After three FSMC interrupt lines connected to the OR after the nested vector interrupt controller. No read / write FIFO, except PCCARD, the code is executed from external memory is not supported Boot, the target frequency is equal to SYSCLK / 2, so the time when the system clock is 72MHz, 36MHz conducted in accordance with external access.4)Nested Vectored Interrupt Controller. Can handle 43 maskable interrupt channels, providing 16 interrupt priority levels. Tightly coupled nested vectored interrupt controller to achieve lower latency interrupt handling directly passed to the kernel interrupt vector table entry address, tightly coupled nested vectored interrupt controller kernel interface, allowing early treatment interruption, the latter to be more high-priority interrupt processing, support tail chain, auto-save processor state terrupts automatically restored on interrupt exit, no instructions intervention.5)External interrupt / event controller. External interrupt / event controller consists for 19 to generate interrupt / event requests edge detector lines. Each line can be individually configured to select the trigger event, it can be individually masked. There is a pending interrupt request registers to maintain state. When an external line appear longer than the internal APB2 clock-cycle pulse, the external interrupt / eventcontroller is able to detect. Up to 112 GPIO connected to the 16 external interrupt lines.6)Clocks and startup. At boot time or to the system clock selection, but the reset when the internal 8MHz crystal oscillator is selected as the CPU clock. Can choose a 4-16MHz external clock, and will be monitored to determine the success. During this time, the interrupt controller is disabled and the software management is subsequently disabled. Also, if there is a need, PLL clock interrupt management fully available. Comparator can be used more pre-configuration of the AHB frequency, including high-speed and low-speed APB APB, APB highest frequency of high-speed 72MHz, low-speed APB highest frequency of 36MHz.Architectural AdvantagesIn addition to the new features Enhanced peripheral interfaces, STM32 series also interconnect with other STM32 microcontrollers offer the same standard interface, such sharing of peripherals to enhance the entire product family, application flexibility, so that developers can a plurality of design reuse the same software. New STM32 standard peripherals include 10 timers, two 12-bit ADC, two 12-bit DAC, two I2C interfaces, five USART interfaces and three SPI ports. There are 12 new products peripherals direct data storage channel, there is a CRC calculation unit, like other STM32 microcontrollers, the supports 96 unique identifier.New series also has followed the STM32 microcontroller family of products low voltage and energy saving are two advantages. 2.0V to 3.6V operating voltage range compatible with the mainstream of battery technologies such as lithium batteries and nickel-metal hydride batteries, the package also features a battery operation mode dedicated pin Vbat. 72MHz frequency to execute code from flash consumes only 27mA current. There are four low-power mode, the current consumption can be reduced to two microamps. Quick Start from low power mode to save energy too; starting circuit using STM32 internally generated 8MHz signal, the microcontroller from stop mode when you wake up with less than 6 microseconds.中文翻译:单片机STM321 STM32的介绍STM32系列基于专为要求高性能、低成本、低功耗的嵌入式应用专门设计的ARM Cortex-M3内核。
单片机控制系统外文翻译

Microcomputer SystemsElectronic systems are used for handing information in the most general sense; this information may be telephone conversation, instrument read or a company’s accounts, but in each case the same main type of operation are involved: the processing, storage and transmission of information. in conventional electronic design these operations are combined at the function level; for example a counter, whether electronic or mechanical, stores the current and increments it by one as required. A system such as an electronic clock which employs counters has its storage and processing capabilities spread throughout the system because each counter is able to store and process numbers.Present day microprocessor based systems depart from this conventional approach by separating the three functions of processing, storage, and transmission into different section of the system. This partitioning into three main functions was devised by V on Neumann during the 1940s, and was not conceived especially for microcomputers. Almost every computer ever made has been designed with this structure, and despite the enormous range in their physical forms, they have all been of essentially the same basic design.In a microprocessor based system the processing will be performed in the microprocessor itself. The storage will be by means of memory circuits and the communication of information into and out of the system will be by means of special input/output(I/O) circuits. It would be impossible to identify a particular piece of hardware which performed the counting in a microprocessor based clock because the time would be stored in the memory and incremented at regular intervals but the microprocessor. However, the software which defined the system’s behavior woul d contain sections that performed as counters. The apparently rather abstract approach to the architecture of the microprocessor and its associated circuits allows it to be very flexible in use, since the system is defined almost entirely software. The design process is largely one of software engineering, and the similar problems of construction and maintenance which occur in conventional engineering are encountered when producing software.The figure1.1 illustrates how these three sections within a microcomputer are connected in terms of the communication of information within the machine. The system is controlled by the microprocessor which supervises the transfer of information between itself and the memory and input/output sections. The external connections relate to the rest (that is, the non-computer part) of the engineering system.Fig.1.1 Three Sections of a Typical MicrocomputerAlthough only one storage section has been shown in the diagram, in practice two distinct types of memory RAM and ROM are used. In each case, the word ‘memory’ is rather inappropriate since a computers memory is more like a filing cabinet in concept; information is stored in a set of numbered ‘boxes’ and it is referenced by the serial number of the ‘box’ in questio n.Microcomputers use RAM (Random Access Memory) into which data can be written and from which data can be read again when needed. This data can be read back from the memory in any sequence desired, and not necessarily the same order in which it was w ritten, hence the expression ‘random’ access memory. Another type of ROM (Read Only Memory) is used to hold fixed patterns of information which cannot be affected by the microprocessor; these patterns are not lost when power is removed and are normally used to hold the program which defines the behavior of a microprocessor based system. ROMs can be read like RAMs, but unlike RAMs they cannot be used to store variable information. Some ROMs have their data patterns put in during manufacture, while others are programmable by the user by means of special equipment and are called programmable ROMs. The widely used programmable ROMs are erasable by means of special ultraviolet lamps and are referred to as EPROMs, short for Erasable Programmable Read Only Memories. Other new types of device can be erased electrically without the need for ultraviolet light, which are called Electrically Erasable Programmable Read Only Memories,EEPROMs.The microprocessor processes data under the control of the program, controlling the flow of information to and from memory and input/output devices. Some input/output devices are general-purpose types while others are designed for controlling special hardware such as disc drives or controlling information transmission to other computers. Most types of I/O devices are programmable to some extent, allowing different modes of operation, while some actually contain special-purpose microprocessors to permit quite complex operations to be carried out without directly involving the main microprocessor.The microprocessor , memory and input/output circuit may all be contained on the same integrated circuit provided that the application does not require too much program or data storage . This is usually the case in low-cost application such as the controllers used in microwave ovens and automatic washing machines . The use of single package allows considerable cost savings to e made when articles are manufactured in large quantities . As technology develops , more and more powerful processors and larger and larger amounts of memory are being incorporated into single chip microcomputers with resulting saving in assembly costs in the final products . For the foreseeable future , however , it will continue to be necessary to interconnect a number of integrated circuits to make a microcomputer whenever larger amounts of storage or input/output are required.Another major engineering application of microcomputers is in process control. Here the presence of the microcomputer is usually more apparent to the user because provision is normally made for programming the microcomputer for the particular application. In process control applications the benefits lf fitting the entire system on to single chip are usually outweighed by the high design cost involved, because this sort lf equipment is produced in smaller quantities. Moreover, process controllers are usually more complicated so that it is more difficult to make them as single integrated circuits. Two approaches are possible; the controller can be implemented as a general-purpose microcomputer rather like a more robust version lf a hobby computer, or as a ‘packaged’ system, signed for replacing controllers based on older technologies such as electromagnetic relays. In the former case the system wouldprobably be programmed in conventional programming languages such as the ones to9 be introduced later, while in the other case a special-purpose language might be used, for example one which allowed the function of the controller to be described in terms of relay interconnections, In either case programs can be stored in RAM, which allows them to be altered to suit changes in application, but this makes the overall system vulnerable to loss lf power unless batteries are used to ensure continuity of supply. Alternatively programs can be stored in ROM, in which case they virtually become part of the electronic ‘hardware’ and are often referred to as firmware.More sophisticated process controllers require minicomputers for their implementation, although the use o f large scale integrated circuits ‘the distinction between mini and microcomputers, Products and process controllers of various kinds represent the majority of present-day microcomputer applications, the exact figures depending on one’s interpretation of the word ‘product’. Virtually all engineering and scientific uses of microcomputers can be assigned to one or other of these categories. But in the system we most study Pressure and Pressure Transmitters. Pressure arises when a force is applied over an area. Provided the force is one Newton and uniformly over the area of one square meters, the pressure has been designated one Pascal. Pressure is a universal processing condition. It is also a condition of life on the planet: we live at the bottom of an atmospheric ocean that extends upward for many miles. This mass of air has weight, and this weight pressing downward causes atmospheric pressure. Water, a fundamental necessity of life, is supplied to most of us under pressure. In the typical process plant, pressure influences boiling point temperatures, condensing point temperatures, process efficiency, costs, and other important factors. The measurement and control of pressure or lack of it-vacuum-in the typical process plant is critical.单片机控制系统广义地说,微型计算机控制系统(单片机控制系统)是用于处理信息的,这种被用于处理的信息可以是电话交谈,也可以是仪器的读数或者是一个企业的帐户,但是各种情况下都涉及到相同的主要操作:信息的处理、信息的存储和信息的传递。
单片机英文文献外文翻译
单片机英文文献Principle of MCUSingle-chip is an integrated on a single chip a complete computer system. Even though most of his features in a small chip, but it has a need to complete the majority of computer components: CPU, memory, internal and external bus system, most will have the Core. At the same time, such as integrated communication interfaces, timers, real-time clock and other peripheral equipment. And now the most powerful single-chip microcomputer system can even voice, image, networking, input and output complex system integration on a single chip.Also known as single-chip MCU (Microcontroller), because it was first used in the field of industrial control. Only by the single-chip CPU chip developed from the dedicated processor. The design concept is the first by a large number of peripherals and CPU in a single chip, the computer system so that smaller, more easily integrated into the complex and demanding on the volume control devices. INTEL the Z80 is one of the first design in accordance with the idea of the processor, From then on, the MCU and the development of a dedicated processor parted ways.Early single-chip 8-bit or all of the four. One of the most successful is INTEL's 8031, because the performance of a simple and reliable access to a lot of good praise. Since then in 8031 to develop a single-chip microcomputer system MCS51 series. Based on single-chip microcomputer system of the system is still widely used until now. As the field of industrial control requirements increase in the beginning of a 16-bit single-chip, but not ideal because the price has not been very widely used. After the 90's with the big consumer electronics product development, single-chip technology is a huge improvement. INTEL i960 Series with subsequent ARM in particular, a broad range of applications, quickly replaced by 32-bit single-chip 16-bit single-chip high-end status, and enter the mainstream market. Traditional 8-bit single-chip performance has been the rapid increase in processing power compared to the 80's to raise a few hundred times. At present, the high-end 32-bit single-chip frequency over 300MHz, the performance of the mid-90's close on the heels of a special processor, while the ordinary price of the model dropped to one U.S. dollars, the most high-end models, only 10 U.S. dollars. Contemporary single-chip microcomputer system is no longer only the bare-metal environment in the development and use of a large number of dedicated embedded operating system is widely used in the full range of single-chip microcomputer. In PDAs and cell phones as the core processing of high-end single-chip or even a dedicated direct access to Windows and Linux operating systems.More than a dedicated single-chip processor suitable for embedded systems, so it was up to the application. In fact the number of single-chip is the world's largest computer. Modern human life used in almost every piece of electronic and mechanical products will have a single-chip integration. Phone, telephone, calculator, home appliances, electronic toys, handheld computers and computer accessories such as a mouse in the Department are equipped with 1-2 single chip. And personal computers also have a large number of single-chip microcomputer in the workplace. Vehicles equipped with more than 40 Department of the general single-chip, complex industrial control systems and even single-chip may have hundreds of work at the same time! SCM is not only far exceeds the number of PC and other integrated computing, even more than the numberof human beings.Hardwave introductionThe 8051 family of micro controllers is based on an architecture which is highly optimized for embedded control systems. It is used in a wide variety of applications from military equipment to automobiles to the keyboard on your PC. Second only to the Motorola 68HC11 in eight bit processors sales, the 8051 family of microcontrollers is available in a wide array of variations from manufacturers such as Intel, Philips, and Siemens. These manufacturers have added numerous features and peripherals to the 8051 such as I2C interfaces, analog to digital converters, watchdog timers, and pulse width modulated outputs. Variations of the 8051 with clock speeds up to 40MHz and voltage requirements down to 1.5 volts are available. This wide range of parts based on one core makes the 8051 family an excellent choice as the base architecture for a company's entire line of products since it can perform many functions and developers will only have to learn this one platform.The basic architecture consists of the following features:·an eight bit ALU·32 descrete I/O pins (4 groups of 8) which can be individually accessed·two 16 bit timer/counters·full duplex UART· 6 interrupt sources with 2 priority levels·128 bytes of on board RAM·separate 64K byte address spaces for DA TA and CODE memoryOne 8051 processor cycle consists of twelve oscillator periods. Each of the twelve oscillator periods is used for a special function by the 8051 core such as op code fetches and samples of the interrupt daisy chain for pending interrupts. The time required for any 8051 instruction can be computed by dividing the clock frequency by 12, inverting that result and multiplying it by the number of processor cycles required by the instruction in question. Therefore, if you have a system which is using an 11.059MHz clock, you can compute the number of instructions per second by dividing this value by 12. This gives an instruction frequency of 921583 instructions per second. Inverting this will provide the amount of time taken by each instruction cycle (1.085 microseconds).单片机原理单片机是指一个集成在一块芯片上的完整计算机系统。
单片机 外文翻译 外文文献 英文文献 单片机简介 中英对照

原文来源图书馆电子资源Single chip brief introductionThe monolithic integrated circuit said that the monolithic micro controller, it is not completes some logical function the chip, but integrates a computer system to a chip on. Summary speaking: A chip has become a computer. Its volume is small, the quality is light, and the price cheap, for the study, the application and the development has provided the convenient condition. At the same time, the study use monolithic integrated circuit is understands the computer principle and the structure best choice.The monolithic integrated circuit interior also uses with the computer function similar module, for instance CPU, memory, parallel main line, but also has with the hard disk behave identically the memory component7 what is different is its these part performance is opposite our home-use computer weak many, but the price is also low, generally does not surpass 10 Yuan then Made some control electric appliance one kind with it is not the 'very complex work foot, We use now the completely automatic drum washer, the platoon petti-coat pipe: VCD and so on Inside the electrical appliances may see its form! It is mainly takes the control section the core part.It is one kind of online -like real-time control computer, online -like is the scene control, needs to have the strong antijamming ability, the low cost, this is also and the off-line type computer (for instance home use PC,) main differenceThe monolithic integrated circuit is depending on the procedure, and may revise. Realizes the different function through the different procedure, particularly special unique some functions, this is other component needs to take the very big effort to be able to achieve, some are the flowered big strength is also very difficult to achieve. One is not the very complex function, if develops in the 50s with the US 74 series, or the 60s's CD4000 series these pure hardware do decides, the electric circuit certainly arc a big PCB board ! But if, if succeeded in the 70s with the US puts in the market the series monolithic integrated circuit, the result will have the huge difference. Because only the monolithic integrated circuit compiles through you the procedure may realize the high intelligence, high efficiency, as well as redundant reliability The CPU is the key component of a digital computer. Its purpose is to decode instruction received from memory and perform transfers, arithmetic, logic, and control operations with data stored in internal registers, memory, or I/O interface units. Externally, the CPU provides one or more buses for transferring instructions, data, and control information to and from components connected to it. A microcontroller is present in the keyboard and in the monitor in the generic computer; thus these components are also shaded. In such microcontrollers, the CPU may be quite different from those discussed in this chapter. The word lengths may be short, the number of registers small, and the instruction sets limited. Performance, relatively speaking, is poor, but adequate for the task. Most important, the cost of these microcontrollers is very low, making their use cost effective.Because the monolithic integrated circuit to the cost is sensitive, therefore present occupies the dominant status the software is the most preliminary assembly language7 it was except the binary machine code above the most preliminary language, sincewhy were such preliminary must use?Why high-level did the language already achieve the visualization programming level not to use? The reason is very simple, is the monolithic integrated circuit docs not have home computer such CPU, and also has not looked like the hard disk such mass memory equipment. Inside even if a visualization higher order language compilation script only then a button, also will achieve several dozens K the sizes! Does not speak anything regarding the home use PC hard disk, but says regarding the monolithic integrated circuit cannot accept. The monolithic integrated circuit in the hardware source aspect's use factor must very Gao Caixing, therefore assembly, although primitive actually massively is using, Same truth, if attains supercomputer's on operating system and the application software home use PC to come up the movement, home use PC could also not withstand.It can be said that the 20th century surmounted three "the electricity" the time, namely the electrical time, the Electronic Age and already entered computer time. However, this kind of computer, usually refers to the personal computer, is called PC machine. It by the main engine, the keyboard, the monitor and so on is composed. Also has a kind of computer, most people actually not how familiar. This kind of computer is entrusts with the intelligence each kind of mechanical monolithic integrated circuit (also to call micro controller). , This kind of computer's smallest system only has used as the name suggests a piece of integrated circuit, then carries on the simple operation and the control. Because its volume is small, usually hides in is accused the machinery "the belly". It in the entire installment, plays is having like the human brains role, it went wrong, the entire installment paralyzed. Now, this kind of monolithic integrated circuit's use domain already very widespread, like the intelligent measuring appliance, the solid work paid by time control, the communication equipment, the guidance system, the domestic electric appliances and so on, Once each product used the monolithic integrated circuit, could get up causes the effect which the product turned to a new generation, often before product range crown by adjective---- ‘intelligence’, like intelligence washer and so on. Now some factory's technical personnel or other extra-curricular electronic exploiter do certain products, are not the electric circuit are too complex, is the function is too simple, and is imitated extremely easily. Investigates its reason, possibly on card, in the product has not used on the monolithic integrated circuit or other programmable logical component.单片机简介单片机又称单片微控制器,它不是完成某一个逻辑功能的芯片,而是把一个计算机系统集成到一个芯片上。
基于单片机控制温湿度的系统外文及翻译

New Environment Parameters Monitoring And Control System For Greenhouse Based OnMaster-slave DistributedAbstract--According to the actual need of monitoring and control of greenhouse environment parameters in rural areas,a master-slave distributed measurement and control system is designed,in which PC is taken as the host. The system consists of PC ,soil moisture measurement and control module,temperature and humidity, and CO2 monitoring and control module. In the system,PC has large amount of data storage which is easy to make use of fuzzy control expert system,configuration software-KingView is used to develop software for PC,by which the development cycle is shorten and a friendly human-computer interaction is provided.Each monitoring and control module consists of STC12 series of microcontrollers,sensors,relays etc.Different modules are select based on the need if system to achieve control greenhouse in partition and block.I. INTRODUCTIONTo modern indoor agriculture, the automatic measurement and control of environment parameters is the key to achieve crop yield and quality of greenhouse.In recent years,facilities agriculture develops vigorously in our country,matched with it,the monitoring and control instrument of greenhouse have also made certain development.After nearly 10 years of unremitting hard work,our research team of measurement and control system of agriculture environment parameters,designed an intelligent measurement and control system of distribution combined of greenhouse which can be popularized in the vast rural areas.This system is mainly control of temperature,humidity,CO2 concentration,soil moisture and illumination of greenhouse.OF SCM,as the data storage is small,display interface is single,amount of information is limited,but its capability price ratio is high,so it is used as a front unit of data acquisition and control;and of PC,it has a large amount of data storage,rich software,convenient human-computer interaction,and so on.If we use outdated and low-priced PC,taking the PC as the upper machine,taking the different function control modules composed of multiple microcomputers as the lower machines,then a master-slave distributed and intelligent control system bases on microcomputer is made up,by which both better monitoring and control,display and data collection or management are achieved,but also lower cost of system is get according to the actual need.II SYSTEM STRUCTURE AND PRINCIPLEThe most marked feature of the distribution combined and intelligent control system greenhouse is that of incorporating with data acquisition, control and management as a whole,module combination, simple structure,convenient human-computer interaction,and using technology of intelligent expert fuzzy control,which can adapt to a variety of crop management control in greenhouse.The basic structure of the system is shown in Fig.1.The structure of the distributed system is composed of two layers:the upper and lower.In the top-price PC is taken as the host to make system management and experts fuzzy operation in intelligent,and to provide a friendly human-computer interface,and to realize the united monitoring and management of greenhouse; the lower is composed of a series of modules of different function,and in each module,a single chip of AT89C is adopted as the lower machine,RS485 is used to communicate PC with all AT89C,and then the collection,processing and control of the greenhouse parameters is achieved.Each function module is completely isolated in electrical,any failure on the nodule does not produce any effect on other modules.The systemcollects separately ways of environment information through each monitoring and control module,and sends it to host PC through the RS485 interface.And in the PC configuration control system,the acquired parameters are compared with the values of setting,then according to a variety of expert intelligent fuzzy control system of crops at different growth stages,the fuzzy control instructions on the environment temperature,humidity,CO2 concentration,soil water content and the corresponding operation instructions or alarm are given.The system is applied in rural greenhouses in ually at 1/4 near East and West end in a greenhouse,and at the height of 1.5m from the ground in the middle in the northern half (near the wet curtain) and the southern half (near the fan ),a module of air temperature and humidity ,CO2 concentration and a module of soil moisture content are set;a module of soil moisture content will be added in the middle of the greenhouse according to the actual condition;at the height of 1.5m in the main entrance,a water tank is set,of which the solenoid of drip tube should be set based on the need and controlled by module of soil moisture content;and the PC is placed in the main entrance to the greenhouse.III . HARDW ARE DESIGNA.The CP and communication systemIn the distributed system of data acquisition and control,as the micro control unit is limited in data storage and slow in calculating of complex functions,so PC is used and the master-slave module is adopted in the system,that is a system of,taking PC as the host and taking the SCM systems located in the scene as slave.In this distributed system,communication is the key to it.Generally,the serial port of PC is standard RS232,of which transmission distance is shorter.But in agriculture control system.its communication distance is of tens of meters or several kilometers, so RS232/RS485 converter is used to achieve communication between the PC and SCM.To reduce investment,both considering the user convenience and friendly human-computer interaction,low-price PC of above 486 and below PIV is adopted;and considering the operation of configuration software,it is required that memory is 64M or above and hard disk is 10Gb or above.B. The control modules of temperature and humidity,illuminance and CO2 concentrationEach control unit consists of SCM,sensors,signal processing circuit,RS485 interface and output circuit.The hardware structure of module of temperature and humidity,CO2 concentration is shown in Fig.2.CO2 concentration is measured by sensor based on NDIR technology,measurement is of 0~2×103mol.Through the sensor,control system,by software of digital filter,linear interpolation and temperature compensation,the CO2 concentration is output as digital adhered to UART protocol,and then is input directly to the SCM.The new intelligent sensor of SHT11 based on CMOSens technology is chosen in the measurement of temperature and humidity.In SHT11,the temperature and humidity sensors,signal amplification,A/D,I2C bus are all integrated in a chip;it has full-scale calibration,second-line digital output,and humidity measuring range of 0~100% RH,temperature measurement range of -40℃~+123.8℃,humidity measurement accuracy of ±3.0% RH,temperature measurement accuracy of ±0.4℃,the response time of <4s.The illuminance sensor of JY1-TBQ-6 of silicon photovoltaic detection is used Light measuring.Its measurement range is 0~200,000 Lux;spectral range is 400~700(nm) visible light;measurement error is less than 2%; output is 4~20mA or 0~20mV;output signal can bedirectly send to the A/D of the SCM after being amplified to 0~4V.Modules accept the instructions form the the Upper,and output via the output circuit .The output circuit consists of optical isolation,the signal driver and the output relays.C. The measurement and control modules of soil moistureWater is a polar medium, the dielectric constant of the soil containing water is mainly determined by the water,when water content is different,the wave impedance is different.The soil moisture is measured by standing wave radio method in this system.Based on the theory of Engineering Electromagnetic Field,for lossy medium,the electromagnetic wave impedance as follows:Z0=√μ/ε(1+jλ/(ωε))Where μis medium permeability,and μof soil is μ≈μ0 is the vacuum permeability;εis medium dielectric constant;λis medium conductivity;ωis electromagnetic wave frequency.In the very low audio(<2000Hz),the loss tangent of dry soil dielectric is λ/ωε≈0.07,if you choose the frequency of the signal source at above 20MHz.then,ε≈ε∞,the imaginary part of the soil wave impedance is neglect,only the real part,which amounts to a pure resistance.Soil moisture sensor consists of 100MHz signal source,a coaxial transmission line and a 4-pin stainless probe.The electromagnetic waves of signal transmit to the probe along the lines.As the probe impedance and line impedance are different,the superimposition of incident waves and reflected waves forms a standing waves.Taking the coaxial transmission line as a lossless uniform line,wave impedance is Z0,Z l is the load impedance.Then the reflected coefficient of voltage wave at the probe is:Γ=(Z L-Z0)/(Z L+Z0)Choosing the length of transmission line is l=λ/4,the maximum and minimum of both ends of the line are U max and U min,Then the standing wave radio in the line can be expressed as: S=U max /U min =(1-|Γ|)/(1+|Γ|)In the way,the soil moisture radio can be measured by measuring the standing wave rate of transmission line.As shown in Fig.3.,soil moisture module consists of sensors and controllers,the sensors are subordinated to controllers,controllers can be omitted without the need of irrigation in greenhouse.To simplify the control,irrigation technology of node-type in partition is adopted in the control soil moisture in this system.To a certain extent,the parameters of upper and lower the ground can be decoupled by adopting this technology.IV CONTROL SYSTEM PROGRAMMINGThe software of PC is developed by KingView 6.51 of Beijing-controlled Asia.This configuration software has high reliability,shorter development cycle,perfect capability of graphical interface generation,and friendly human-computer interaction;and can create dynamic images and charts in accordance with the layout of equipment in the scene;can visually display the changes of parameters,control status,and can give an alarm when over-limited;and can achieve fuzzy control of greenhouse parameters by using the history curve of environment parameters stored in the specific database and adopting the agricultural expert system.The software of SCM of the slave is developed by Keil C51 to achieve real-time collecting,processing,uploading of the parameters and accept the fuzzy control instructions from the host computer and complete local control of the device.A.Program design of the control moduleThe software of the sub-slave machine of soil moisture module,that include the main function,subroutines of data acquisition and processing,interrupt handling and communicating etc,read the value of standing wave voltage through the parallel data port and obtained the value of soil moisture content by function calculating.The software of the slave machine of monitoring and control of soil moisture mainly complete data communication with the sub-slave machine,uploading measurement data and current control state to the host computer,accepting the fuzzy control instructions from the host computer and output the implementation instructions.The software of the slave machine of temperature and humidity,and CO2 mainly complete reading data of CO2 concentrations and temperature and humidity through the I2C concentration,uploading measurement data and current control state to the host computer,accepting the fuzzy control instructions from the host computer and output the implementation instructions.The structure of the main program and interrupt subroutine of temperature and humidity module are shown in Fig.4.The serial interrupt mode 3 is adopted by all slaves to communicate with the host,transmit the digital collecting and receive instructions.B. Program design of PC and fuzzy control system1)The communication settings of KingView 6.51:In order to ensure the correctness of communication,the upper and lower must follow the same communication protocol,set the communication ually in communication,master-slave mode is adopted in style and responder is adopted in the process.That is ,the master sent a command to the slave first,then et slave give an answer after receiving the command,thus once communication is completed.In KingView ,a scheduled polling method is adopted to do reading and writing between the lower machine by PC.In the project browser of KingView,first,click device →COM1;in the wizard of device configuration,select intelligent modules→SCM→current SCM of HEX→serial port,and then ser parameters for the host computer’s communication.2)The connection of KingView 6.51 and database:Database is the core of the software,that not only contains the definition of variables,real-time parameters and the historical parameters,but also is needed by parameters alarming,fuzzy calculating,reporting ,and displaying.Access2003 desktop database is used as records database of the system,and by using SQL,it is operated by KingView via ODBC.The procedure is :to create data variables in KingView to create a body of records to establish a data source of ODBC to create query screens and make the screen connection.To connected with Microsoft Access2003,the functions of SQLConnect(),SQLSelect(),SQLLast(),SQLNext(),SQLFist(),SQLPrew(),SQLInsrt(),and so on,should be implemented in the command language,and then real-time storage and inquiry of data are completed.3)Software design of PC :For the control system of greenhouse,data storage capacity of the PC is unlimited,so if the existing mature software modules are include into the system,it both be relaxed and can improve the system reliability.The software of software consists of control module and management module.Software of the system consists of the main control interface,auxiliary,databases,etc.A typical main interface of monitoring and control of PC is shown in Fig.5.V. CONCLUSIONAccording to the economic bearing capacity of farmer in Qinhuangdao ,with the existing technology of monitoring and control of environment parameters of greenhouse,a master-slave distributed automatic control system of greenhouse environment in which PC is taken as the host computer is developed.The system has following characteristics:1)With the large amount of data storage of PC,fuzzy control expert system is easy of data storage,modification and system upgrading.2)By using KingView to develop software of PC,the system reliability is improved,and the development cycle is shorten,and a friendly human-computer interface is get.3)A distributed and modular structure is used in the system,it makes the system maintenance easier and adapts to production needs more. The monitoring and control modules of the slave are connected to the host through the RS485 bus based on needs,then the control of greenhouse in partition or block can be achieved.ACKNOWLEDGMENTThis work is supported by Agricultural Science and Technology Achievement Transformation Fund Project.基于主从分布式新的温室环境参数监测和控制系统根据实际在农村地区的温室环境参数的监测和控制,主从分布式测量和控制系统的设计需要,以其中一台计算机作为主机,该系统由PC、土壤水分测量和监测和控制模块组成。
at89c52单片机中英文资料对照外文翻译文献综述
D.htmlat89c52单片机中英文资料对照外文翻译文献综述at89c52单片机简介中英文资料对照外文翻译文献综述AT89C52 Single-chip microprocessor introductionSelection of Single-chip microprocessor1. Development of Single-chip microprocessorThe main component part of Single-chip microprocessor as a result of by such centralize to be living to obtain on the chip,In immediate future middle processor CPU。
Storage RAM immediately﹑memoy readROM﹑Interrupt system、Timer /'s counter along with I/O's rim electric circuit awaits the main microcomputer section,The lumping is living on the chip。
Although the Single-chip microprocessor r is only a chip,Yet through makes up and the meritorous service be able to on sees,It had haveed the calculating machine system property,calling it for this reason act as Single-chip microprocessor r minisize calculating machine SCMS and abbreviate the Single-chip microprocessor。
单片机温度控制系统中英文外文翻译文献

中英文资料外文翻译文献英文原文DescriptionThe at89s52 is a low-power, high-performance CMOS 8-bit microcomputer with 4K bytes of Flash Programmable and Erasable Read Only Memory (PEROM) and 128 bytes RAM. The device is manufactured using Atmel’s high density nonvolatile memory technology and is compatible with the industry standard MCS-51™ instruction set and pinout. The chip combines a versatile 8-bit CPU with Flash on a monolithic chip, the Atmelat89s52 is a powerful microcomputer which provides a highly flexible and cost effective solution to many embedded control applications.Features:• Compatible with MCS-51™ Products• 4K Bytes of In-System Reprogrammable Flash Memory• Endurance: 1,000 Write/Erase Cycles• Fully Static Operation: 0 Hz to 24 MHz• Th ree-Level Program Memory Lock• 128 x 8-Bit Internal RAM• 32 Programmable I/O Lines• Two 16-Bit Timer/Counters• Six Interrupt Sources• Programmable Serial Channel• Low Power Idle and Power Down ModesThe at89s52 provides the following standard features: 4K bytes of Flash, 128 bytes of RAM, 32 I/O lines, two 16-bit timer/counters, a five vectortwo-level interrupt architecture, a full duplex serial port, on-chip oscillator and clock circuitry. In addition, the at89s52 is designed with static logic for operation down to zero frequency and supports two software selectable power saving modes. The Idle Mode stops the CPU while allowing the RAM, timer/counters, serial port and interrupt system to continue functioning. The Power Down Mode saves the RAM contents but freezes the oscillator disabling all other chip functions until the next hardware reset.Pin Description:VCC Supply voltage.GND Ground.Port 0Port 0 is an 8-bit open drain bidirectional I/O port. As an output port each pin can sink eight TTL inputs. When is are written to port 0 pins, the pins can be used as high impedance inputs.Port 0 may also be configured to be the multiplexed loworderaddress/data bus during accesses to external program and data memory. In this mode P0 has internal pullups.Port 0 also receives the code bytes during Flash programming, and outputs the code bytes during program verification. External pullups are required during program verification.Port 1Port 1 is an 8-bit bidirectional I/O port with internal pullups. The Port 1 output buffers can sink/source four TTL inputs. When 1s are written to Port 1 pins they are pulled high by the internal pullups and can be used as inputs. As inputs, Port 1 pins that are externally being pulled low will source current (IIL) because of the internal pullups.Port 1 also receives the low-order address bytes during Flash programming and verification.Port 2Port 2 is an 8-bit bidirectional I/O port with internal pullups. The Port 2 output buffers can sink/source four TTL inputs. When 1s are written to Port 2 pins they are pulled high by the internal pullups and can be used as inputs. As inputs, Port 2 pins that are externally being pulled low will source current (IIL) because of the internal pullups.Port 2 emits the high-order address byte during fetches from external program memory and during accesses to external data memory that use 16-bit addresses (MOVX @ DPTR). In this application it uses strong internalpull-ups when emitting 1s. During accesses to external data memory that use 8-bit addresses (MOVX @ RI), Port 2 emits the contents of the P2 Special Function Register.Port 2 also receives the high-order address bits and some control signals during Flash programming and verification.Port 3Port 3 is an 8-bit bidirectional I/O port with internal pullups. The Port 3 output buffers can sink/source four TTL inputs. When 1s are written to Port 3 pins they are pulled high by the internal pullups and can be used as inputs. As inputs, Port 3 pins that are externally being pulled low will source current (IIL) because of the pullups.Port 3 also serves the functions of various special features of theat89s52 as listed below:Port 3 also receives some control signals for Flash programming andverification.RSTReset input. A high on this pin for two machine cycles while theoscillator is running resets the device.ALE/PROGAddress Latch Enable output pulse for latching the low byte of theaddress during accesses to external memory. This pin is also the program pulse input (PROG) during Flash programming.In normal operation ALE is emitted at a constant rate of 1/6 theoscillator frequency, and may be used for external timing or clockingpurposes. Note, however, that one ALE pulse is skipped during each access to external Data Memory.If desired, ALE operation can be disabled by setting bit 0 of SFRlocation 8EH. With the bit set, ALE is active only during a MOVX or MOVC instruction. Otherwise, the pin is weakly pulled high. Setting the ALE-disable bit has no effect if the microcontroller is in external execution mode.PSENProgram Store Enable is the read strobe to external program memory. When the at89s52 is executing code from external program memory, PSEN is activated twice each machine cycle, except that two PSENactivations are skipped during each access to external data memory.EA/VPPExternal Access Enable. EA must be strapped to GND in order to enable the device to fetch code from external program memory locations starting at 0000H up to FFFFH. Note, however, that if lock bit 1 is programmed, EA will be internally latched on reset. Port pinalternate functions P3.0rxd (serial input port) P3.1txd (serial output port) P3.2^int0 (external interrupt0) P3.3^int1 (external interrupt1) P3.4t0 (timer0 external input) P3.5t1 (timer1 external input) P3.6^WR (external data memory write strobe) P3.7 ^rd (external data memory read strobe)EA should be strapped to VCC for internal program executions.This pin also receives the 12-volt programming enable voltage(VPP) during Flash programming, for parts that require 12-volt VPP.XTAL1Input to the inverting oscillator amplifier and input to the internal clock operating circuit.XTAL2Output from the inverting oscillator amplifier.Oscillator CharacteristicsXTAL1 and XTAL2 are the input and output, respectively, of an inverting amplifier which can be configured for use as an on-chip oscillator, as shown in Figure 1. Either a quartz crystal or ceramic resonator may be used. To drive the device from an external clock source, XTAL2 should be left unconnected while XTAL1 is driven as shown in Figure 2. There are no requirements on the duty cycle of the external clock signal, since the input to the internal clocking circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage high and low time specifications must be observed.Idle ModeIn idle mode, the CPU puts itself to sleep while all the onchip peripherals remain active. The mode is invoked by software. The content of the on-chip RAM and all the special functions registers remain unchanged during this mode. The idle mode can be terminated by any enabled interrupt or by a hardware reset.It should be noted that when idle is terminated by a hard ware reset, the device normally resumes program execution, from where it left off, up to two machine cycles before the internal reset algorithm takes control. On-chip hardware inhibits access to internal RAM in this event, but access to the port pins is not inhibited. To eliminate the possibility of an unexpected write to a port pin when Idle is terminated by reset, the instruction following the one that invokes Idle should not be one that writes to a port pin or to external memory.Status of External Pins During Idle and Power Down Modesmode Program memory ALE ^psen Port0 Port1Port2Port3idle internal 1 1 data data data Data Idle External 1 1 float Data data Data Power down Internal 0 0 Data Data Data Data Power down External 0 0 float data Data data Power Down ModeIn the power down mode the oscillator is stopped, and the instructionthat invokes power down is the last instruction executed. The on-chip RAMand Special Function Registers retain their values until the power down modeis terminated. The only exit from power down is a hardware reset. Resetredefines the SFRs but does not change the on-chip RAM. The reset shouldnot be activated before VCC is restored to its normal operating level andmust be held active long enough to allow the oscillator to restart andstabilize.Program Memory Lock BitsOn the chip are three lock bits which can be left unprogrammed (U) orcan be programmed (P) to obtain the additional features listed in the tablebelow:Lock Bit Protection ModesWhen lock bit 1 is programmed, the logic level at the EA pin issampled and latched during reset. If the device is powered up without a reset,the latch initializes to a random value, and holds that value until reset isactivated. It is necessary that the latched value of EA be in agreement with the current logic level at that pin in order for the device to function properly. Programming the Flash:The at89s52 is normally shipped with the on-chip Flash memory array in the erased state (that is, contents = FFH) and ready to be programmed.The programming interface accepts either a high-voltage (12-volt) or alow-voltage (VCC) program enable signal.The low voltage programming mode provides a convenient way to program the at89s52 inside the user’s system, while the high-voltage programming mode is compatible with conventional third party Flash or EPROM programmers.The at89s52 is shipped with either the high-voltage or low-voltage programming mode enabled. The respective top-side marking and device signature codes are listed in the following table.Vpp=12v Vpp=5vTop-side mark at89s52xxxxyywwat89s52xxxx-5yywwsignature (030H)=1EH(031H)=51H(032H)=FFH (030H)=1EH (031H)=51H (032H)=05HThe at89s52 code memory array is programmed byte-bybyte in either programming mode. To program any nonblank byte in the on-chip Flash Programmable and Erasable Read Only Memory, the entire memory must be erased using the Chip Erase Mode.Programming Algorithm:Before programming the at89s52, the address, data and control signals should be set up according to the Flash programming mode table and Figures 3 and 4. To program the at89s52, take the following steps.1. Input the desired memory location on the address lines.2. Input the appropriate data byte on the data lines.3. Activate the correct combination of control signals.4. Raise EA/VPP to 12V for the high-voltage programming mode.5. Pulse ALE/PROG once to program a byte in the Flash array or the lock bits. The byte-write cycle is self-timed and typically takes no more than 1.5 ms. Repeat steps 1 through 5, changing the address and data for the entire array or until the end of the object file is reached.Data Polling: The at89s52 features Data Polling to indicate the end of a write cycle. During a write cycle, an attempted read of the last byte written will result in the complement of the written datum on PO.7. Once the write cycle has been completed, true data are valid on all outputs, and the next cycle may begin. Data Polling may begin any time after a write cycle has been initiated.Ready/Busy: The progress of byte programming can also be monitored by the RDY/BSY output signal. P3.4 is pulled low after ALE goes high during programming to indicate BUSY. P3.4 is pulled high again when programming is done to indicate READY.Program Verify: If lock bits LB1 and LB2 have not been programmed, the programmed code data can be read back via the address and data lines for verification. The lock bits cannot be verified directly. Verification of the lock bits is achieved by observing that their features are enabled.Chip Erase: T he entire Flash Programmable and Erasable Read Only Memory array is erased electrically by using the proper combination of control signals and by holding ALE/PROG low for 10 ms. The code array is written with all “1”s. The chip erase operation must be executed before the code memory can be re-programmed.Reading the Signature Bytes: The signature bytes are read by the same procedure as a normal verification of locations 030H, 031H, and 032H, except that P3.6 and P3.7 must be pulled to a logic low. The values returned are as follows.(030H) = 1EH indicates manufactured by Atmel(031H) = 51H indicates 89C51(032H) = FFH indicates 12V programming(032H) = 05H indicates 5V programmingProgramming InterfaceEvery code byte in the Flash array can be written and the entire array can be erased by using the appropriate combination of control signals. The write operation cycle is selftimed and once initiated, will automatically time itself to completion.中文翻译描述at89s52是美国ATMEL公司生产的低电压,高性能CMOS8位单片机,片内含4Kbytes的快速可擦写的只读程序存储器(PEROM)和128 bytes 的随机存取数据存储器(RAM),器件采用ATMEL公司的高密度、非易失性存储技术生产,兼容标准MCS-51产品指令系统,片内置通用8位中央处理器(CPU)和flish存储单元,功能强大at89s52单片机可为您提供许多高性价比的应用场合,可灵活应用于各种控制领域。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Microcomputer SystemsElectronic systems are used for handing information in the most general sense; this information may be telephone conversation, instrument read or a company’s accounts, but in each case the same main type of operation are involved: the processing, storage and transmission of information. in conventional electronic design these operations are combined at the function level; for example a counter, whether electronic or mechanical, stores the current and increments it by one as required. A system such as an electronic clock which employs counters has its storage and processing capabilities spread throughout the system because each counter is able to store and process numbers.Present day microprocessor based systems depart from this conventional approach by separating the three functions of processing, storage, and transmission into different section of the system. This partitioning into three main functions was devised by V on Neumann during the 1940s, and was not conceived especially for microcomputers. Almost every computer ever made has been designed with this structure, and despite the enormous range in their physical forms, they have all been of essentially the same basic design.In a microprocessor based system the processing will be performed in the microprocessor itself. The storage will be by means of memory circuits and the communication of information into and out of the system will be by means of special input/output(I/O) circuits. It would be impossible to identify a particular piece of hardware which performed the counting in a microprocessor based clock because the time would be stored in the memory and incremented at regular intervals but the microprocessor. However, the software which defined the system’s behavior wou ld contain sections that performed as counters. The apparently rather abstract approach to the architecture of the microprocessor and its associated circuits allows it to be very flexible in use, since the system is defined almost entirely software. The design process is largely one of software engineering, and the similar problems of construction and maintenance which occur in conventional engineering are encountered when producing software.The figure1.1 illustrates how these three sections within a microcomputer are connected in terms of the communication of information within the machine. The system is controlled by the microprocessor which supervises the transfer of information between itself and the memory and input/output sections. The external connections relate to the rest (that is, the non-computer part) of the engineering system.Fig.1.1 Three Sections of a Typical MicrocomputerAlthough only one storage section has been shown in the diagram, in practice two distinct types of memory RAM and ROM are used. In each case, the word ‘memory’ is rather inappropriate since a computers memory is more like a filing cabinet in concept; information is stored in a set of numbered ‘boxes’ and it is referenced by the serial number of the ‘box’ in question.Microcomputers use RAM (Random Access Memory) into which data can be written and from which data can be read again when needed. This data can be read back from the memory in any sequence desired, and not necessarily the same order in which it was written, hence the expression ‘random’ access memory. Another type of ROM (Read Only Memory) is used to hold fixed patterns of information which cannot be affected by the microprocessor; these patterns are not lost when power is removed and are normally used to hold the program which defines the behavior of a microprocessor based system. ROMs can be read like RAMs, but unlike RAMs they cannot be used to store variable information. Some ROMs have their data patterns put in during manufacture, while others are programmable by the user by means of special equipment and are called programmable ROMs. The widely used programmable ROMs are erasable by means of special ultraviolet lamps and are referred to as EPROMs, short for Erasable Programmable Read Only Memories. Other new types of device can be erased electrically without the need for ultraviolet light, which are called Electrically Erasable Programmable Read Only Memories, EEPROMs.The microprocessor processes data under the control of the program, controlling the flow of information to and from memory and input/output devices. Some input/output devices are general-purpose types while others are designed for controlling special hardware such as disc drives or controlling information transmission to other computers. Most types of I/O devices are programmable to some extent, allowing different modes of operation, while some actually contain special-purpose microprocessors to permit quite complex operations to be carried out without directly involving the main microprocessor.The microprocessor processes data under the control of the program, controlling the flow ofinformation to and from memory and input/output devices. Some input/output devices are general-purpose types while others are designed for controlling special hardware such as disc drives or controlling information transmission to other computers. Most types of I/O devices are programmable to some extent, allowing different modes of operation, while some actually contain special-purpose microprocessors to permit quite complex operations to be carried out without directly involving the main microprocessor.The microprocessor , memory and input/output circuit may all be contained on the same integrated circuit provided that the application does not require too much program or data storage . This is usually the case in low-cost application such as the controllers used in microwave ovens and automatic washing machines . The use of single package allows considerable cost savings to e made when articles are manufactured in large quantities . As technology develops , more and more powerful processors and larger and larger amounts of memory are being incorporated into single chip microcomputers with resulting saving in assembly costs in the final products . For the foreseeable future , however , it will continue to be necessary to interconnect a number of integrated circuits to make a microcomputer whenever larger amounts of storage or input/output are required.Another major engineering application of microcomputers is in process control. Here the presence of the microcomputer is usually more apparent to the user because provision is normally made for programming the microcomputer for the particular application. In process control applications the benefits lf fitting the entire system on to single chip are usually outweighed by the high design cost involved, because this sort lf equipment is produced in smaller quantities. Moreover, process controllers are usually more complicated so that it is more difficult to make them as single integrated circuits. Two approaches are possible; the controller can be implemented as a general-purpose microcomputer rather like a more robust version lf a hobby computer, or as a ‘packaged’ system, signed for replacing controllers based on older technologies such as electromagnetic relays. In the former case the system would probably be programmed in conventional programming languages such as the ones to9 be introduced later, while in the other case a special-purpose language might be used, for example one which allowed the function of the controller to be described in terms of relay interconnections, In either case programs can be stored in RAM, which allows them to be altered to suit changes in application, but this makes the overall system vulnerable to loss lf power unless batteries are used to ensure continuity of supply. Alternatively programs can be stored in ROM, in which case they virtually become part of the electronic ‘hardware’ and are often referred to as firmware. More sophisticated process controllersrequire minicomputers for their implementation, although the use lf large scale integrated circuits ‘the distinction between mini and microcomputers, Products and process controllers of various kinds represent the majority of present-day microcomputer applications, the exact figures depending on one’s interpretation of the word ‘product’. Virtually all engineering and scientific uses of microcomputers can be assigned to one or other of these categories. But in the system we most study Pressure and Pressure Transmitters. Pressure arises when a force is applied over an area. Provided the force is one Newton and uniformly over the area of one square meters, the pressure has been designated one Pascal. Pressure is a universal processing condition. It is also a condition of life on the planet: we live at the bottom of an atmospheric ocean that extends upward for many miles. This mass of air has weight, and this weight pressing downward causes atmospheric pressure. Water, a fundamental necessity of life, is supplied to most of us under pressure. In the typical process plant, pressure influences boiling point temperatures, condensing point temperatures, process efficiency, costs, and other important factors. The measurement and control of pressure or lack of it-vacuum-in the typical process plant is critical.The working instruments in the plant usually include simple pressure gauges, precision recorders and indicators, and pneumatic and electronic pressure transmitters. A pressure transmitter makes a pressure measurement and generates either a pneumatic or electrical signal output that is proportional to the pressure being sensed.In the process plant, it is impractical to locate the control instruments out in the place near the process. It is also true that most measurements are not easily transmitted from some remote location. Pressure measurement is an exception, but if a high pressure of some dangerous chemical is to be indicated or recorded several hundred feet from the point of measurement, a hazard may be from the pressure or from the chemical carried.To eliminate this problem, a signal transmission system was developed. This system is usually either pneumatic or electrical. And control instruments in one location. This makes it practical for a minimum number of operators to run the plant efficiently.When a pneumatic transmission system is employed, the measurement signal is converted into pneumatic signal by the transmitter scaled from 0 to 100 percent of the measurement value. This transmitter is mounted close to the point of measurement in the process. The transmitter output-air pressure for a pneumatic transmitter-is piped to the recording or control instrument. The standard output range for a pneumatic transmitter is 20 to 100kPa, which is almost universally used.When an electronic pressure transmitter is used, the pressure is converted to electrical signal thatmay be current or voltage. Its standard range is from 4 to 20mA DC for current signal or from 1 to 5V DC for voltage signal. Nowadays, another type of electrical signal, which is becoming common, is the digital or discrete signal. The use of instruments and control systems based on computer or forcing increased use of this type of signal.Sometimes it is important for analysis to obtain the parameters that describe the sensor/transmitter behavior. The gain is fairly simple to obtain once the span is known. Consider an electronic pressure transmitter with a range of 0~600kPa.The gain isdefined as the change in output divided by the change in input. In this case, the output is electrical signal (4~20mA DC) and the input is process pressure (0~600kPa). Thus the gain. Beside we must measure Temperature Temperature measurement is important in industrial control, as direct indications of system or product state and as indirect indications of such factors as reaction rates, energy flow, turbine efficiency, and lubricant quality. Present temperature scales have been in use for about 200 years, the earliest instruments were based on the thermal expansion of gases and liquids. Such filled systems are still employed, although many other types of instruments are available. Representative temperature sensors include: filled thermal systems, liquid-in-glass thermometers, thermocouples, resistance temperature detectors, thermostats, bimetallic devices, optical and radiation pyrometers and temperature-sensitive paints.Advantages of electrical systems include high accuracy and sensitivity, practicality of switching or scanning several measurements points, larger distances possible between measuring elements and controllers, replacement of components(rather than complete system), fast response, and ability to measure higher temperature. Among the electrical temperature sensors, thermocouples and resistance temperature detectors are most widely used.DescriptionThe A T89C51 is a low-power, high-performance CMOS 8-bit microcomputer with 4K bytes of Flash programmable and erasable read only memory (PEROM). The device is manufactur ed using Atmel’s high-density nonvolatile memory technology and is compatible with the industry-standard MCS-51 instruction set and pinout. The on-chip Flash allows the program memory to be reprogrammed in-system or by a conventional nonvolatile memory programmer. By combining a versatile 8-bit CPUkPamA kPa mA kPa kPa mA mA Kr 027.0600160600420==--=with Flash on a monolithic chip, the Atmel AT89C51 is a powerful microcomputer which provides a highly-flexible and cost-effective solution to many embedded control applications.Function characteristicThe A T89C51 provides the following standard features: 4K bytes of Flash, 128 bytes of RAM, 32 I/O lines, two 16-bit timer/counters, a five vector two-level interrupt architecture, a full duplex serial port, on-chip oscillator and clock circuitry. In addition, the AT89C51 is designed with static logic for operation down to zero frequency and supports two software selectable power saving modes. The Idle Mode stops the CPU while allowing the RAM, timer/counters, serial port and interrupt system to continue functioning. The Power-down Mode saves the RAM contents but freezes the oscillator disabling all other chip functions until the next hardware reset.Pin DescriptionVCC:Supply voltage.GND:Ground.Port 0:Port 0 is an 8-bit open-drain bi-directional I/O port. As an output port, each pin can sink eight TTL inputs. When 1s are written to port 0 pins, the pins can be used as highimpedance inputs.Port 0 may also be configured to be the multiplexed loworder address/data bus during accesses to external program and data memory. In this mode P0 has internal pullups.Port 0 also receives the code bytes during Flash programming,and outputs the code bytes during programverification. External pullups are required during programverification.Port 1Port 1 is an 8-bit bi-directional I/O port with internal pullups.The Port 1 output buffers can sink/source four TTL inputs.When 1s are written to Port 1 pins they are pulled high by the internal pullups and can be used as inputs. As inputs,Port 1 pins that are externally being pulled low will source current (IIL) because of the internal pullups.Port 1 also receives the low-order address bytes during Flash programming and verification.Port 2Port 2 is an 8-bit bi-directional I/O port with internal pullups.The Port 2 output buffers can sink/source four TTL inputs.When 1s are written to Port 2 pins they are pulled high by the internal pullups and canbe used as inputs. As inputs,Port 2 pins that are externally being pulled low will source current, because of the internal pullups.Port 2 emits the high-order address byte during fetches from external program memory and during accesses to external data memory that use 16-bit addresses. In this application, it uses strong internal pullupswhen emitting 1s. During accesses to external data memory that use 8-bit addresses, Port 2 emits the contents of the P2 Special Function Register.Port 2 also receives the high-order address bits and some control signals during Flash programming and verification.Port 3Port 3 is an 8-bit bi-directional I/O port with internal pullups.The Port 3 output buffers can sink/source four TTL inputs.When 1s are written to Port 3 pins they are pulled high by the internal pullups and can be used as inputs. As inputs,Port 3 pins that are externally being pulled low will source current (IIL) because of the pullups.Port 3 also serves the functions of various special features of the AT89C51 as listed below:Port 3 also receives some control signals for Flash programming and verification.RSTReset input. A high on this pin for two machine cycles while the oscillator is running resets the device. ALE/PROGAddress Latch Enable output pulse for latching the low byte of the address during accesses to external memory. This pin is also the program pulse input (PROG) during Flash programming.In normal operation ALE is emitted at a constant rate of 1/6 the oscillator frequency, and may be used for external timing or clocking purposes. Note, however, that one ALE pulse is skipped during each access to external Data Memory.If desired, ALE operation can be disabled by setting bit 0 of SFR location 8EH. With the bit set, ALE is active only during a MOVX or MOVC instruction. Otherwise, the pin is weakly pulled high. Setting the ALE-disable bit has no effect if the microcontroller is in external execution mode.PSENProgram Store Enable is the read strobe to external program memory.When the AT89C51 is executing code from external program memory, PSEN is activated twice each machine cycle, except that two PSEN activations are skipped during each access to external data memory.EA/VPPExternal Access Enable. EA must be strapped to GND in order to enable the device to fetch code from external program memory locations starting at 0000H up to FFFFH. Note, however, that if lock bit 1 is programmed, EA will be internally latched on reset.EA should be strapped to VCC for internal program executions.This pin also receives the 12-volt programming enable voltage(VPP) during Flash programming, for parts that require12-volt VPP.XTAL1Input to the inverting oscillator amplifier and input to the internal clock operating circuit.XTAL2Output from the inverting oscillator amplifier.Oscillator CharacteristicsXTAL1 and XTAL2 are the input and output, respectively,of an inverting amplifier which can be configured for use as an on-chip oscillator, as shown in Figure 1.Either a quartz crystal or ceramic resonator may be used. To drive the device from an external clock source, XTAL2 should be left unconnected while XTAL1 is driven as shown in Figure 2.There are no requirements on the duty cycle of the external clock signal, since the input to the internal clocking circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage high and low time specifications must be observed.微型计算机控制系统(单片机控制系统)广义地说,微型计算机控制系统(单片机控制系统)是用于处理信息的,这种被用于处理的信息可以是电话交谈,也可以是仪器的读数或者是一个企业的帐户,但是各种情况下都涉及到相同的主要操作:信息的处理、信息的存储和信息的传递。