水泵模拟仿真
专业的泵阀模拟软件PumpLinx-应用篇文档集(一)
6.国内PumpLinx柱塞泵模拟应用文献—多排式轴向柱塞泵的流体动力特性研 究.pdf 介绍了多排式轴向柱塞泵的流体动力特性研究。
7.高性能摩托引擎冷却装置的分析(EN).pdf 介绍了高性能摩托引擎冷却装置的分析。
5.专业的泵阀CFD仿真专家PumpLinx(1).pdf
背景介绍、Pumplinx的核心优势、Pumplinx的核心应用、Pumplinx的行
业应用、典型客户
6.PumpLinx在航空发动机燃油系统泵类元件CFD仿真中的应用.pdf 泵类元件的设计是一个不断改进、优化的过程。这就意味着从设计到试
介绍了PumpLinx软件及其在石油石化行业泵CFD仿真中的应用。
8.Simerics软件简介及应用案例详解.pdf 1 Simerics公司及CFD软件介绍
2 Simerics技术优势
3 应用案例详解
8.PumpLinx空化模型原理(EN).pdf 介绍了PumpLinx空化模型原理。
9.外齿轮泵Pumplinx数值模拟结果分析报告.pdf 本算例展示了Pumplinx在外齿轮泵CFD模拟方面(特别是预测空化现象) 的独特优势。
.pdf 介绍了泵CFD模拟专家Pumplinx软件简介及其在水下航行体CFD仿真中的 应用。
3.泵CFD模拟专家Pumplinx水下超空化设备的应用.pdf
1. 什么是空化
2. 水下超空化设备的描述 3. 计算空化的技术难点 4. 超空化鱼雷案例分享 5. 应用领域
4.泵CFD模拟专家Pumplinx在喷水推进的应用.pdf Pumplinx的优势特点、成功案例分享、问与答
柱塞泵文档: 1.SimulationX斜盘柱塞泵模拟.pdf 该篇文章主要阐述了如何利用多学科仿真软件SimulationX 建立斜盘柱塞泵
水泵随机振动仿真

水泵随机振动仿真
水泵随机振动仿真是一种利用计算机模拟技术来研究水泵在运行过程中所遭受的随机振动的方法。
在水泵随机振动仿真中,可以通过建立水泵的数学模型,并结合振动分析软件来进行仿真模拟。
这种方法可以有效地预测水泵在运行中的振动情况,并对水泵的振动原因进行分析和优化。
水泵随机振动仿真的应用非常广泛,不仅可以用于水泵的设计和优化,还可以用于水泵的运行和维护。
通过水泵随机振动仿真,可以更好地了解水泵在运行中的振动情况,及时发现并解决振动问题,从而提高水泵的性能和可靠性。
水泵随机振动仿真技术的发展,使得水泵的设计和运行效率得到了极大的提升。
在未来,随着技术的不断发展,水泵随机振动仿真技术将会得到更广泛的应用。
PID控制的泵供水系统仿真试验

PID控制的泵供水系统仿真试验摘要:为了进行泵供水系统试验,通过建立泵供水系统基本结构和各环节的传递函数,组成系统动态结构图,在MATLAB Simulink下进行仿真试验以观察系统输出响应。
使用稳定边界法、根轨迹超前校正法和直接设置比例一积分一微分(PID)参数3种方法进行控制器设计。
通过仿真观察泵供水系统的输出特性,比较并找出合适的控制器设计方法。
通过仿真观察输出响应得到稳定边界法和根轨迹超前校正法不适合调节泵供水系统。
而采用直接设置PID参数的方法。
利用MATLAB的仿真集成环境Si咖link设置修改PID参数,选择其中一组较好的PID参数,使泵供水系统得到了满意的输出响应。
仿真结果为搭建试验平台提供了理论基础依据。
关键词:泵供水系统;PID;MATLAB仿真;传递函数;输出响应Simulation of water suppIy system based on PID controIAbstract:In order to implement water supply system experiments,the basic strueture of water supply system and corresponding modules transferfunctions were established to constitute dynamic block diagram.0utput response in matlab simulation integrated environment simulink was simulated.Stable boundary method,lead compensator based on root locus method and designing PID para—meters method were used lo design the contmUer. Appropriate eontroller design method was found by obsen,ing system output characteristic.It waus concluded that PID stable boundary method and lead compensator based on root locus method are not suitable to regulate water supply system;where as the method of desigIling PIDparameters can directly modify the parameters in Simulink to find a suitable set of PID parameters which give satisfying output response of the system.The simulation results provide the oretical basis for building experimental platform.Key word:water supply system for pumps;PID;MATLAB simulation;transfer function;output response研究泵供水系统优化节能问题是供水领域的热点。
流体力学与水泵仿真实验
蔡建安,郭丽娜,周扬屏,钟梅英 蔡建安,林晓飞 蔡建安,周扬屏,汪明明 蔡建安,钟梅英,戴波 蔡建安,郭丽娜,沈翼军
编著者
于安徽工业大学 2010 年 8 月
3
目 录
1 2
3
4
5
6
7
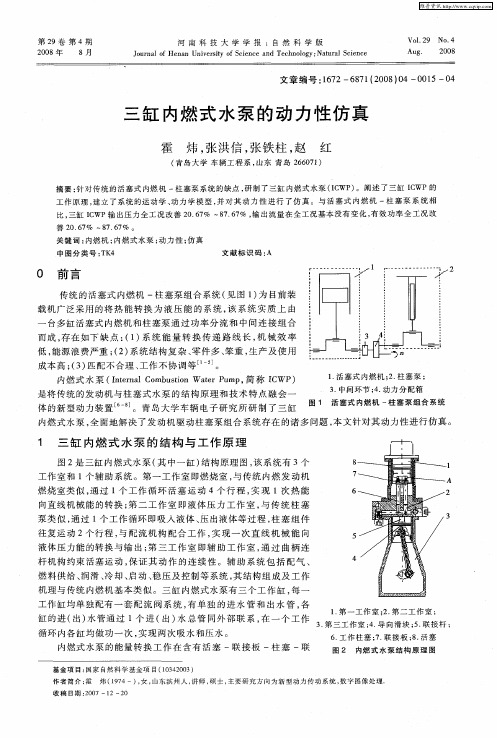
三缸内燃式水泵的动力性仿真
作者简介 : 霍
炜 ( 9 4一) 女 , 东 滨 州 人 , 师 , 士 , 要 研 究 方 向为 新 型 动 力 传 动 系 统 , 字 图像 处 理 17 , 山 讲 硕 主 数
收 稿 日期 : 0 7—1 20 2—2 0
维普资讯
・
1 ・ 6
6
5
杆 机构 约束 活塞 运 动 , 保证 其 动 作 的连 续 性 。辅 助 系 统 包 括 配 气 、
燃 料供 给 、 润滑 、 冷却 、 动 、 压及 控制 等 系统 , 结 构组 成 及 工作 启 稳 其 机 理 与传统 内燃 机基 本 类似 。三缸 内燃 式水泵 有 三个 工 作 缸 , 每一 工 作缸 均单 独配 有一 套 配 流 阀系 统 , 单独 的进 水 管 和 出 水 管 , 有 各 缸 的进 ( 水管 通过 1个 进 ( ) 总管 同外 部 联 系 , 一 个 工 作 出) 出 水 在 循 环 内各 缸均 做功 一 次 , 现两 次 吸水 和压 水 。 实 内燃式 水泵 的能量 转 换 工作 在含 有 活 塞 一联 接板 一柱 塞 一联
1 三 缸 内 燃 式 水 泵 的 结 构 与 工 作 原 理
图 2是 三 缸 内燃式 水泵 ( 中一缸 ) 其 结构 原理 图 , 系统 有 3个 该 工 作室 和 1个辅 助 系统 。第 一工 作 室 即燃 烧室 , 传统 内燃 发 动机 与
8 7
燃烧 室类 似 , 通过 1 工 作 循 环 活 塞 运 动 4个 行 程 , 现 1次 热 能 个 实
V0l2 NO 4 _9 .
Au g. 20 08
文章 编 号 :6 2—6 7 (0 8 0 0 1 0 17 8 1 2 0 )4— 0 5— 4
泵产品CFD仿真技术解决方案
泵产品CFD仿真技术解决方案1概述优良的泵产品必须满足一定的技术指标,这包括水力性能、振动情况和结构特性。
这三方面的技术构成了泵产品制造商的核心竞争力。
水力性能是泵最重要的质量指标,它包括流量-扬程特性、效率特性、汽蚀特性等。
在过去几年中,CFD在水力机械领域广泛应用使其地位变得越来越重要。
其中主要原因是:在模型转轮制造之前就可以采用CFD对水力设计进行优化,这样CFD可以大大减少模型试验的时间和费用。
其次,采用CFD可以对最终设计的转轮叶片型线进行优化,这在传统的模型试验方法中是几乎不可能的。
另外,非常重要的一点是,经过对某一个流场的分析计算,流场的所有参数,例如:速度分量,静态和总的压力以及紊流量,都已得到,可以用于进一步的详细分析。
国内外众多知名水力机械制造商已经将CFD/CAE分析手段纳入到产品研发的标准流程中。
相比以往的设计方法,使用CFD能够提高泵的效率5~10个百分点,提高叶轮寿命半年~4年时间,降低流动噪声,还能实现高比转速泵的单调流量-扬程曲线;利用CFD筛选非常耗时的泵实验模型,提高整个产品研发的效率。
结合模型实验和其它流场可视化手段使得工程师对泵内的流动现象有了更深入的了解。
对某些项目,CFD和试验分析可同时进行,这样可以得出CFD理论分析结果与试验结果之间的比较。
这也是弥补数值分析方法局限性的一个前提条件,而且也可以提高数值分析的精度。
最终,对某些项目不进行模型试验而直接采用CFD进行水力设计已成为可能。
目前泵产品的设计研发中利用CFD仿真手段主要有如下工作内容:•新模型的开发•已有模型的优化•预测扬程特性及效率•汽蚀性能•动静干涉•压力脉动•流致噪声•流体产生的径向力,轴向力•水力矩•流道分段损失2泵产品CFD仿真方法在水力机械设计过程中,可以采用许多种计算方法,这取决于计算精度和计算时间。
可采用一元理论,以及建立在试验结果基础上的二元理论(叶片到叶片,轮毂到轮缘)和一些简化程序(基于势流理论的程序)。
水泵随机振动仿真
水泵随机振动仿真篇一:水泵是供水设备中的重要部件,其工作状态直接关系到供水的质量和稳定性。
水泵的随机振动是一种复杂的自然现象,会给其后续的维护和改进带来困难。
为了深入探究水泵随机振动的特点和规律,我们采用数值仿真方法进行了研究。
本文通过对水泵随机振动的仿真分析,得到了一些有意义的结论。
首先,水泵的随机振动频率与水泵的工作参数密切相关,包括水流速度、扬程、流量等。
其次,水泵的随机振动幅度和相位也会随着工作参数的变化而变化。
此外,水泵的随机振动特性还具有时空分布性,即在不同时间和空间范围内,水泵的振动特性可能存在较大差异。
基于上述仿真结果,我们进一步探讨了水泵随机振动的原因和机理。
我们发现,水泵的随机振动主要是由于水流波动和水泵结构不稳定等因素相互作用的结果。
同时,水泵的工作参数也会对振动特性产生重要影响,如水流速度过大会导致水泵振动幅度加大,扬程过高则可能导致水泵相位偏差较大等。
最后,我们提出了一些针对水泵随机振动的改进措施。
主要包括:合理设置水泵工作参数,减小水流速度和扬程等;采用稳定的结构设计方案,降低水泵结构的不稳定性;在水泵运行过程中进行监测和预警,及时消除振动隐患等。
水泵随机振动仿真研究是供水设备研究中的重要方向,对于提高供水质量和稳定性具有重要的意义。
未来的研究可以从多个方面入手,如进一步探究水泵振动的机理和影响因素,开发基于振动信息的监测和预警系统,以及开展实际水泵振动实验等,为水泵的设计和改进提供更为科学和有效的支持。
篇二:水泵是一个非常重要的机械设备,用于将水源输送到供水系统。
在使用过程中,水泵可能会因为外界的干扰而产生随机振动,这种振动可能会对水泵的安全和性能产生负面影响。
因此,对水泵随机振动的仿真分析是非常必要的。
在本文中,我们将使用仿真软件来模拟水泵的随机振动,并通过分析仿真结果来了解水泵振动的原因和如何减少振动。
首先,我们需要建立一个水泵的模型,包括水泵的机械结构、流体力学原理和电磁控制系统。
CAE-水泵流体仿真、应用与案例

ANSYS 流体软件及workbench平台 ANSYS的水泵设计和仿真工具 行业案例介绍
目 录
ANSYS流体仿真系列软件
• 通用前处理软件: – 几何:ANSYS Design Modeler、BladeGen、ICEM CFD – 网格:ANSYS Meshing、Tgrid、ICEM CFD、
• DesignModeler & BladeEditor
–添加透平机械组件特征
Improvements in BladeModeler
• Design Comparison
– Create “snapshot” of existing design; use as visual reference for subsequent design changes
• Vista CPD (Centrifugal Pump Design)
– Native Workbench application – Ability to use Vista CPD directly create
• Blade geometry model • Throughflow analysis • Volute geometry and mesh
• Axial • Radial • Transitional
网格生成工具
• 泵的3D分析可用的网格工具
– ANSYS Meshing Platform
– 基于Workbench平台,与DesignModeler几何相连接的网格工具
– ANSYS TurboGrid
– 专用透平机械网格工具,生成高质量六面体网格 – 与DesignModeler连接,直接生成六面体网格
基于模糊PID的变频水泵恒压供水系统仿真
基于模糊PID的变频水泵恒压供水系统仿真王鑫;黄险峰;林彬【摘要】针对中央空调机组的恒压供水问题提出了一种基于模糊PID控制器在线调整PID参数的变频水泵恒压供水系统.讨论了如何确定模糊PID控制器的隶属函数和模糊规则的问题,利用MATLAB软件中的模糊控制工具箱和Simulink对系统进行了仿真实验,并对常规PID控制器和模糊PID控制器分别选取了两组不同的系统传递函数,模糊PID控制器通过输出调整量ΔKp、ΔKi、ΔKd,对PID的参数Kp、Ki、Kd进行了在线调整.仿真实验结果表明模糊PID控制器不仅能有效抑制超调现象,提高系统的响应速度和稳态性能,而且对系统结构参数变化的适应能力也更强.【期刊名称】《五邑大学学报(自然科学版)》【年(卷),期】2013(027)001【总页数】5页(P59-63)【关键词】模糊PID;变频水泵;恒压供水【作者】王鑫;黄险峰;林彬【作者单位】五邑大学信息工程学院,广东江门 529020;五邑大学信息工程学院,广东江门 529020;深圳市深蓝电子有限公司,广东深圳 518055【正文语种】中文【中图分类】TP273常规PID控制具有原理简单、稳定性好、可靠性高的特点,是工业过程控制中应用最广泛的一类基本控制器,它对各类线性定常系统的控制都能够获得满意的效果.对于常规PID控制器,一组整定好的参数只能在较小范围内有较好的效果. 当系统结构和参数发生变化时,控制器性能变差,甚至无法使用[1]. 但是,在许多工业控制过程中被控对象的结构和参数具有时变性. 中央空调机组的恒压供水系统就是一个典型的大延迟、非线性系统,常规PID控制器对这类系统往往不能取得良好的控制效果. 模糊PID控制器根据误差反馈和模糊规则, 通过模糊推理在整个控制过程中不断调整PID的参数,可以实现对扰动及被控系统结构参数变化的自适应调节,对这类大延迟、非线性系统达到良好的控制效果[2].变频恒压供水系统原理如图1所示,其主要由水箱、模糊PID控制器、压力传感器、回水池和变频水泵组成. 其中,控制部分采用Fresscale HCS08系列单片机,压力数据采集由放置在水箱底部的压力传感器完成.水箱底部的压力传感器将压力输入模糊PID控制器并与设定压力值比较,计算出水压误差和误差变化率,模糊PID控制器将根据误差和误差变化率以及事先设定好的模糊规则,向变频水泵输出一个合适的PWM电压信号调节供水量,从而实现对出水口水压的恒压控制.模糊PID控制器如图2所示,模糊推理部分是控制器的核心,设置2个输入量和3个输出量,输入量分别为水压误差E和水压误差变化率EC,控制器的输出是在线调整PID参数Kp、Ki和Kd[2].常规PID控制器采用的是常规的数字增量式PID算法,见下式:对于常规PID控制来讲,参数Kp、Ki和Kd整定好之后就没法改变,所以这个弊端使常规PID不能很好控制参数和结构时变的系统. 模糊PID控制器的核心思想就是通过模糊推理对参数Kp、Ki和Kd进行在线实时调整,使参数自动调整到合适的取值[3],即使控制器具有自适应能力. 参数自动调整思路如下,在整个控制过程中,模糊控制器会根据反馈情况给出调整量ΔKp、ΔKi和ΔKd,PID参数修正的公式如下:2.2 确定隶属函数隶属函数的确定对于模糊控制系统的性能好坏起着关键作用. 隶属函数的确定具有一定的主观性,这是由模糊控制的本质决定的. 目前,隶属函数的确定方法大多依靠经验、实验数据和实践[4]. 本文选取高斯型隶属函数作为E和EC的隶属函数,三角型隶属函数作为ΔKp、ΔKi和ΔKd的隶属函数.按实际需求,E、EC的论域均设为:[-6 6],如图3. ΔKp、ΔK i和ΔKd的论域均设为:[-6 6],如图4所示. 控制器的输入模糊变量E、EC和输出模糊变量ΔKp、ΔKi和ΔKd所取的模糊子集均定为:{NB(负大),NM(负中),NS(负小),Z(零),PS(正大),PM(正中),PB(正大)}.图3 E和EC的隶属度函数图4 ΔKp、ΔKi和ΔKd的隶属度函数隶属函数以及隶属函数参数的最后选定通过选取若干组参数并通过试凑法来确定[9],实际效果好的函数将作为选定的隶属函数.2.3 模糊控制规则的建立模糊系统设计的另一个关键点是建立合适的模糊控制规则, 其在很大程度上决定了模糊控制器性能的好坏. 一般的做法是获取专家经验后,按照一定的形式提取出控制规则,同时要考虑到规则的数量. 有时规则太多控制效果不一定好,选择合适的规则数量一方面可以避免“规则爆炸”问题,另一方面也符合模糊控制器设计的简单性原则[5]. 根据常规PID控制器中Kp、Ki和Kd对系统响应速度、超调量和稳定性的影响,并结合实践中的专家经验知识,恒压模糊PID控制器的Kp、Ki和Kd3个参数在模糊自适应整定过程中应主要参考以下原则[6]:a)当|E|较大时,应主要考虑系统响应速度、避免较大的超调和防止引起微分溢出,所以取较大的Kp、Ki为0和较小的Kd;b)当|E|中等大小时,为防止较大的超调量,Kp应较小,Ki和Kd的取值应适当,需特别关注Kd的值,因为它对系统响应的影响较大.c)当|E|较小时,考虑提高系统稳态性能,应取较大的Kp和Ki. 此时,|EC|小则Kd大,|EC|大则Kd小,所以取中等Kd以保证系统的抗干扰性能.本文采用以下的模糊规则形式:IF(E is … and EC is …)THEN (ΔKp is …, ΔKi is …, ΔKd is … ).根据以上总结的几条原则和采用的规则形式,结合系统的实际情况,得到针对ΔKp、ΔKi和ΔKd的模糊控制规则表[7],见表1.表1 ΔKp、ΔKi和ΔKd的模糊控制规则表ΔKp/ΔKi/ΔKd水压误差变化率EC NBNMNSZPSPMPB 水压误差ENBPB/NB/PSPB/NB/NSPB/NM/NBPM/NM/NBPS/NS/NBZ/Z/NMZ/Z/PS NMPB/NB/PSPB/NB/NSPM/NM/NBPS/NS/NMPS/NS/NMZ/PS/NSNS/Z/Z NSPM/NB/ZPM/NM/NSPM/NS/NMPS/NS/NMZ/Z/NSNS/PS/NSNS/PS/Z ZPM/NM/ZPS/NM/NSPS/NS/NSZ/Z/NSNS/PS/NSNS/PM/NSNM/PM/Z PSPS/NM/ZPS/NS/ZZ/Z/ZNS/PS/ZNS/PS/ZNM/PM/ZNM/PB/ZPMPS/Z/PBZ/Z/NSNS/PS/PSNM/PS/PSNM/PM/PSNB/PB/PSNB/PB/PBPBZ/Z/PBZ/Z/PMNM/PS/PMNM/PM/PMNB/PM/PSNB/PB/PSNB/PB/PB2.4 解模糊化模糊推理得到的结果是模糊集合,不能直接用来调整PID的参数. 因此,必须通过解模糊化计算才能得到确定值来调整PID参数. 本文采用重心法解模糊化,公式如下:,表示论域中的元素,表示每个元素对应的隶属度[8].3 仿真实验为了验证模糊PID控制算法的有效性和实用性,采用MATLAB中的Simulink工具搭建系统模型,如图5,对分别采用模糊PID控制和常规PID控制的系统性能进行对比分析. 为方便研究,假设系统传递函数为:,模糊PID控制和常规PID控制的系统阶跃响应如图6-a所示.图5 模糊PID控制和常规PID控制仿真模型为了比较两种控制器对系统结构参数变化的适应能力,现将系统传递函数改为:,阶跃响应如图6-b所示.从图6可以看出,当系统结构参数变化后,常规PID控制器的超调量和响应时间明显加大,而模糊PID控制器的控制效果未受较大影响,依然能保持较小的超调量和响应时间.图6 模糊PID控制和常规PID控制的阶跃响应对比图4 结论本文将模糊推理应用于水箱水位的PID控制中,通过模糊推理实现了对PID参数的在线调整. 从仿真实验可以看出,模糊PID控制较常规PID控制不仅有更快的响应速度、有效抑制超调量,而且对系统结构参数变化的适应能力也更强,而且在稳态误差方面两者基本差不多.参考文献[责任编辑:韦韬]Simulation of Variable Frequency Pump Constant Pressure Water-supplying System Based on Fuzzy PIDWANG Xin1, HUANG Xian-Feng1, LIN Bin2(1. School of Information Engineering, Wuyi University,Jiangmen 529020 China; 2. Shenzhen Syslab Electronics Co.Ltd,Shenzhen 518055, China) Abstract: In order to solve the problem of constant pressure water-supplying of central air conditioner, a variable frequency pump constant pressure water-supplying system based on fuzzy PID is proposed. The problem of how to determine the membership functions and fuzzy rules of fuzzy PID controller is defined. Simulation experiment by means of fuzzy control toolbox and Simulink in MATLAB is implemented by selecting two different system transfer functions for conventional PID controller and fuzzy PID controller. Fuzzy PID controller adjusts PID parameters Kp, Ki, Kdonline by outputting adjustment ΔKp, ΔKi, ΔKd. Simulation results show that the Fuzzy PID controller has better performance in restricting the overshoot, improving response speed and steady state performance, and the ability to adapt to the changes of the system structure parameters is also stronger.Key words: fuzzy PID; variable frequency pump; constant pressure water-supply文章编号:1006-7302(2013)01-0059-05中图分类号:TP273文献标志码:A收稿日期:2012-10-30作者简介:王鑫(1986—)男,山东临沂人,在读硕士生,主要从事中央空调控制和节能方案研究;黄险峰,副教授,博士,硕士生导师,通信作者,主要从事智能信息处理的研究.隶属函数的确定对于模糊控制系统的性能好坏起着关键作用. 隶属函数的确定具有一定的主观性,这是由模糊控制的本质决定的. 目前,隶属函数的确定方法大多依靠经验、实验数据和实践[4]. 本文选取高斯型隶属函数作为E和EC的隶属函数,三角型隶属函数作为ΔKp、ΔKi和ΔKd的隶属函数.按实际需求,E、EC的论域均设为:[-6 6],如图3. ΔKp、ΔKi和ΔKd的论域均设为:[-6 6],如图4所示. 控制器的输入模糊变量E、EC和输出模糊变量ΔKp、ΔKi和ΔKd所取的模糊子集均定为:{NB(负大),NM(负中),NS(负小),Z(零),PS(正大),PM(正中),PB(正大)}.隶属函数以及隶属函数参数的最后选定通过选取若干组参数并通过试凑法来确定[9],实际效果好的函数将作为选定的隶属函数.模糊系统设计的另一个关键点是建立合适的模糊控制规则, 其在很大程度上决定了模糊控制器性能的好坏. 一般的做法是获取专家经验后,按照一定的形式提取出控制规则,同时要考虑到规则的数量. 有时规则太多控制效果不一定好,选择合适的规则数量一方面可以避免“规则爆炸”问题,另一方面也符合模糊控制器设计的简单性原则[5]. 根据常规PID控制器中Kp、Ki和Kd对系统响应速度、超调量和稳定性的影响,并结合实践中的专家经验知识,恒压模糊PID控制器的Kp、Ki和Kd3个参数在模糊自适应整定过程中应主要参考以下原则[6]:a)当|E|较大时,应主要考虑系统响应速度、避免较大的超调和防止引起微分溢出,所以取较大的Kp、Ki为0和较小的Kd;b)当|E|中等大小时,为防止较大的超调量,Kp应较小,Ki和Kd的取值应适当,需特别关注Kd的值,因为它对系统响应的影响较大.c)当|E|较小时,考虑提高系统稳态性能,应取较大的Kp和Ki. 此时,|EC|小则Kd大,|EC|大则Kd小,所以取中等Kd以保证系统的抗干扰性能.本文采用以下的模糊规则形式:IF(E is … and EC is …)THEN (ΔKp is …, ΔKi is …, ΔKd is … ).根据以上总结的几条原则和采用的规则形式,结合系统的实际情况,得到针对ΔKp、ΔKi和ΔKd的模糊控制规则表[7],见表1.模糊推理得到的结果是模糊集合,不能直接用来调整PID的参数. 因此,必须通过解模糊化计算才能得到确定值来调整PID参数. 本文采用重心法解模糊化,公式如下:表示论域中的元素,表示每个元素对应的隶属度[8].为了验证模糊PID控制算法的有效性和实用性,采用MATLAB中的Simulink工具搭建系统模型,如图5,对分别采用模糊PID控制和常规PID控制的系统性能进行对比分析. 为方便研究,假设系统传递函数为:,模糊PID控制和常规PID控制的系统阶跃响应如图6-a所示.为了比较两种控制器对系统结构参数变化的适应能力,现将系统传递函数改为:,阶跃响应如图6-b所示.从图6可以看出,当系统结构参数变化后,常规PID控制器的超调量和响应时间明显加大,而模糊PID控制器的控制效果未受较大影响,依然能保持较小的超调量和响应时间.本文将模糊推理应用于水箱水位的PID控制中,通过模糊推理实现了对PID参数的在线调整. 从仿真实验可以看出,模糊PID控制较常规PID控制不仅有更快的响应速度、有效抑制超调量,而且对系统结构参数变化的适应能力也更强,而且在稳态误差方面两者基本差不多.【相关文献】[1] 齐学义,蔡艾江,吴疆,等. 变风量空调系统模糊PID控制的仿真[J]. 江苏大学学报,2005(4): 365-368.[2] 谢仕宏,朱晓聪. 恒压供水系统模糊PID控制[J]. 中国农村水利水电,2008(5): 34-36.[3] 张恩勤,施颂椒. 一类基于PID控制的新型模糊控制方法[J]. 上海交通大学学报,2000, 34(5): 630-634.[4] 石辛民,郝整清. 模糊控制及其MATLAB仿真[M]. 北京:清华大学出版社,北京交通大学出版社,2008.[5] 胡包钢,应浩. 模糊PID控制技术研究发展回顾及其面临的若干重要问题[J]. 自动化学报,2001, 27(4): 567-580[6] 翟旭升,谢寿生,杨伟,等. 基于自适应模糊PID控制的恒压供气系统[J]. 液压与气动,2008(2): 21-23.[7] 张金焕. PID控制系统和模糊自适应PID控制系统的研究及比较[J]. 武汉理工大学学报,2005(5): 286-290.[8] 苏明. 模糊PID控制及其MATLAB仿真[J]. 现代机械,2004, 4(6): 52-55.[9] 王春艳. 基于Smith预估模糊PID控制的加热器温控系统[J]. 自动化与仪表,2012(6): 49-52.。
基于UG的自吸式水泵设计及仿真
第 5期
20 0 8年 1 0月
哈 尔 滨 理 工 大 学 学 报 J OURNAL HARB N UNI I V.S I C .& T H. EC
V0. 3 No 5 1 1 .
Oc . 0 8 t,2 0
基 于 U 的 自吸 式 水 泵 设 计 及 仿 真 G
中图分类 号 : H12 T 2 文献标 识 码 : A 文章 编号 : 0 7 2 8 ( 0 8 0 — 0 1 0 10 — 63 20 )5 00 — 4
De in a d Si lt n o l —s c ig Pu a e n UG sg n mua i fSef u kn mp B s d o o
过 程 , 实 时地检 查 出零 部件 之 间的 干 涉,可以直 观地 看到 自吸 泵的整 个运 动 过程 , 可 同时也 可 以分
析其运动的极限位置、 空间运动位置、 运动参数等 内容. 其结果表 明, 自吸式水泵的创新设计是合 对 理的, 对原理进行仿真 , 可以有效地避免在加工及 实地操作时发生重大失误. 关 键词 : G;自吸 水泵 ; 动仿 真 ;动 态装 配 U 运
张 元
( 哈尔滨 理工大学 机械动力 丁程学 院, 黑龙江 哈尔滨 10 8 ) 50 0
摘ห้องสมุดไป่ตู้
要 : 对 大量使 用 的普通 水 泵存在 的诸 多缺 陷 , 针 利用 U G软 件进 行 了 自吸 式水 泵 的创 新设 ‘
计 , 用参 数化 方 法建立 了 自吸式 水 泵的运 动仿 真模 型. 采 通过 对 自吸 式 水泵 的运动仿 真及 模拟 运动
Z月AⅣG 口 l n
( col f ca i l dP w rE gneig abnU i rt o cec n eh o g , ri 108 C ia S ho o h nc o e n ier ,H ri nv sy f ineadT cnl y Habn 50 0, hn ) Me aa n n e i S o
水泵全性能曲线无假定建模电脑仿真
2 C l g f eore n ni n e t cec, i a gU ie i , rm i i in 30 2) . ol eo sucs dE v o m na Si e X ̄in nvr t Uu q  ̄ ag8 0 5 e R a r l n sy X Ke o d: n esl o l ep m hrce sc; o -su e dl g po ci usirg sin s uai yW r su i r mpe u pcaat t s nn asm dmoei ; r et np r t er s ; i l o v ac t i r i n j o u e o m tn
Ho i Ho u Ya gLxn uJe, uJ n, n iig
f. oeeo tr o srac n il n ier g X  ̄i g giu ua U i ri, rm i i ag8 05 ; 1 C l g f l Wae nevnya dCv g e n, i a r h rl nv sy Uu q X ̄i 3 0 2 C iE n i nA e e t n
t r t s w i h c n b d ld a d smu a e t o td vso . T e a c r c ft i meh d h s r a h d a d e c e e e si , h c a e mo e e n i lt d wi u i i n h c u a y o s i c h i h to a e c e n x e d d
(. 1新疆 农 业大 学水利 与土 木 工程 学院 , 新疆 乌鲁 木齐 8 0 5 ; 3 0 2
பைடு நூலகம்
2 新疆 大 学资源 与环境 科 学 学院 , . 新疆 乌鲁木 齐 8 0 5 ) 3 0 2
一种潜水泵的仿真制造方法及系统[发明专利]
![一种潜水泵的仿真制造方法及系统[发明专利]](https://img.taocdn.com/s3/m/0f5e4113770bf78a64295467.png)
专利名称:一种潜水泵的仿真制造方法及系统
专利类型:发明专利
发明人:杨方飞,闫楚良,张书明,高桂荣,孟祥明,周福强,许安祥
申请号:CN200610012098.8
申请日:20060602
公开号:CN101082340A
公开日:
20071205
专利内容由知识产权出版社提供
摘要:本发明公开了一种潜水泵仿真制造方法包括以下步骤:(1)根据设计参数进行水力设计;(2)在分步式协同设计平台上建立潜水泵零部件的三维数字产品模型;(3)通过产品数据管理平台将三维数字产品模型提供给各领域仿真工具进行虚拟仿真;(4)在协同仿真平台上对仿真虚拟样机进行产品结构、性能分析预测,实现产品最优化设计;(5)产品样机生产。
本发明还公开了一种潜水泵仿真制造系统,该系统包括分步式协同设计平台、协同仿真平台和执行分步式协同设计平台与协同仿真平台的数据交换的产品数据管理平台。
本发明的应用能有效缩短潜水泵的研发周期和研发成本,并能够实现产品的最优化设计。
申请人:中国农业机械化科学研究院
地址:100083 北京市朝阳区德胜门外北沙滩一号
国籍:CN
代理机构:北京律诚同业知识产权代理有限公司
更多信息请下载全文后查看。
水泵典型控制电路的控制仿真设计实验报告

水泵典型控制电路的控制仿真设计实验报告
作为一名中学生,我们经常需要进行实验来巩固所学知识。
而本次实验的主题是水泵典型控制电路的控制仿真设计。
在这篇报告中,我将详细介绍本次实验的设计过程、结果以及对实验的感悟。
第一,我们需要了解水泵典型控制电路的基本原理。
水泵是一种将水从低处抽到高处的设备,其控制电路主要包括开关、继电器和接触器等元件。
通过这些元件的组合,可以实现对水泵的启停、正反转等控制操作。
第二,我们开始进行实验的设计。
首先,我们需要搭建一个简单的电路系统,包括电源、开关、继电器和接触器等元件。
然后,我们使用仿真软件对电路进行模拟,并设置不同的控制条件,如启动时间、停止时间等。
最后,我们观察仿真结果,分析电路的性能和优缺点。
在实验过程中,我们遇到了一些问题。
例如,有时候仿真结果与实际情况不太一致;有些元件的参数设置不正确,导致电路无法正常工作等。
但是,通过不断的尝试和调整,我们最终成功地完成了实验,并得到了一些有意义的结果。
通过这次实验,我对水泵典型控制电路有了更深入的理解。
我认识到,控制电路的设计不仅需要掌握基本原理和技术知识,还需要具备一定的实践能力和创新思维。
同时,我也意识到了实验的重要性,它可以帮助我们
更好地理解理论知识,并提高我们的实际操作能力。
总之,本次水泵典型控制电路的控制仿真设计实验是一次非常有意义的经历。
通过这次实验,我不仅加深了对控制电路的理解,还锻炼了自己的实践能力和创新思维。
我相信,在未来的学习生活中,我会更加努力地学习和探索,不断提高自己的综合素质。
水泵模拟仿真

平顶山工业职业技术学院毕业设计(论文)说明书第四章中央水泵房的模拟仿真在整个水泵系统就地控制箱上的指示灯信号有:高压柜合闸、高压柜短接电抗器、电动阀开到位、电动阀关到位、电动阀过转矩、真空度。
由PLC柜上的触摸屏和上位计算机组成的网络监控,触摸屏安装的是嵌入版的MCGS组态软件,上位计算机安装的是网络版的MCGS组态软件,两种组态软件的监视画面基本相同。
在组态软件的监视画面上,详细地显示了PLC控制系统各种工作状态和运行数据,使工作人员可以很方便地了解整个中原水泵系统的工作情况。
本设计采用的组态软件为北京昆仑通泰自动化软件科技有限公司研发的MCGS,具有功能完善、操作简便、可视性好、可维护性强的突出特点。
通过与其他相关的硬件设备结合,可以快速、方便的开发各种用于现场采集、数据处理和控制的设备。
MCGS是能够在Microsoft各种32位Windows平台上运行的开发工具,MCGS 的体系结构由主控窗口、设备窗口、用户窗口、实时数据库和运行策略5部分组成,如图5-1所示。
运行时,MCGS通过对现场实时数据的采集、处理,并以动画显示、流程控制、报警处理和报表输出等方式,防爆值班人员进行现场操作。
MCGS嵌入版组态软件专门应用于嵌入式操作系统,它适应于应用系统对功能、可靠性、成本、体积、功耗等综合性能有严格要求的专用计算机系统。
图5-1 MCGS体系结构图用MCGS创建工程的流程图,如下图所示:图5-2 工程的流程图4.1 用户窗口组态在用户窗口中,通过对多个图形对象的组态设置,建立相应的动画连接,用清晰生动的画面反映工业控制过程。
用户窗口是由用户来定义的、用来构成MCGS嵌入版图形界面的窗口。
用户窗口是组成MCGS嵌入版图形界面的基本单位,所有的图形界面都是由一个或多个用户窗口组合而成的,它的显示和关闭由各种功能构件(包括动画构件和策略构件)来控制[10]。
用户窗口相当于一个“容器”,用来放置图元、图符和动画构件等各种图形对象,通过对图形对象的组态设置,建立与实时数据库的连接,来完成图形界面的设计工作。
基于模糊PID的变频水泵恒压供水系统仿真

W ANG Xi n , H UANG Xi a n — Fe n g 。 LI N Bi n
,
( 1 . S c h o o l o f I n f o r ma t i o n En g i n e e r i n g , Wu y i Un i v e r s i t y , J i a n g me n 5 2 9 0 2 0 C h i n a ;
Байду номын сангаас2月
文章编号:l 0 0 6 — 7 3 0 2( 2 0 l 3 )0 I - 0 0 5 9 ・ 0 5
基 于模 糊 P I D的变 频 水 泵 恒 压 供 水 系统仿 真
王鑫 ’ ,黄险峰 ’ ,林 彬 。
( 1 .五 邑 大 学 信 息工程 学院 ,广 东 江门 5 2 9 0 2 0 2 .深 圳 市 深 蓝 电 子 有 限 公 司 ,广 东 深 圳 5 1 8 0 5 5 )
器和模糊 P l D 控 制 器 分 剐 选 取 了 两 组 不 同 的 系统 传 递 函数 ,模 糊 PI D控帑 】 器 通 过 输 出调 整 量
煤矿水泵的模拟操作方法

煤矿水泵的模拟操作方法
煤矿水泵的模拟操作方法如下:
1. 检查设备:在进行模拟操作之前,要先检查水泵设备是否完好无损,确认是否能正常工作。
2. 开始操作:启动水泵前,应先打开入水阀门,待水流进入水泵后再启动水泵。
3. 监控水流:启动水泵后要监控水流情况,观察水泵进出口压力和水流量是否正常。
如果水流过小或过大,应及时调整水泵运行参数。
4. 控制水压:设备要求的水压不同,要根据需求调整水泵运行参数,以达到设定的水压。
5. 停止操作:当需要停止水泵时,要先关闭出水阀门,再关闭进水阀门,并将水泵切断电源。
以上是煤矿水泵模拟操作方法的基本流程,根据实际工作需要和设备要求,还需进行适当调整。
多级泵 PumpLinx 仿真报告
多级泵PumpLinx仿真报告中国船舶重工集团公司第704研究所上海海基盛元信息科技有限公司目录1 简介 (1)1.1多级泵的简介 (1)1.2 CFD技术简介 (1)1.3 泵的CFD模拟 (2)2 多级泵的PumpLinx仿真步骤 (2)2.1 多级泵的稳态计算 (2)2.1.1 几何模型的导入 (2)2.1.2 网格划分 (9)2.1.3 交互面的创建 (11)2.1.4 模型选择与设置 (12)2.1.5 边界条件设置 (14)2.1.6 流体工质的定义 (15)2.1.7 计算 (15)2.1.8 结果后处理 (17)3 总结 (23)4 附录 (23)4.1 CFD技术 (23)4.2 泵的CFD模拟 (24)4.3 通用CFD软件 (24)4.4通用CFD软件的主要优点 (24)4.5 通用CFD软件的缺点 (25)4.6 PumpLinx简介 (25)4.7 PumpLinx的技术优势 (25)4.8 PumpLinx独特的专有网格技术 (27)4.9 选择PumpLinx的理由 (28)4.9.1 通用CFD软件FLUENT和泵CFD模拟专用CFD软件的比较 (28)4.9.2 选择PumpLinx的理由 (30)1 简介1.1多级泵的简介多级泵是由三级同轴离心泵组成,叶片数分别为10、7、9片,转速都为985转/分,如图1所示。
离心泵就是根据离心力原理设计的,高速旋转的叶轮叶片带动水转动将水甩出,从而达到输送的目的。
离心泵是最常见的动力式泵。
动力式泵靠快速旋转的叶轮对液体的作用力,将机械能传递给液体,使其动能和压力能增加,然后再通过泵缸,将大部分动能转换为压力能而实现输送。
动力式泵又称叶轮式泵或叶片式泵。
1.2 CFD技术简介计算流体动力学(CFD)是在计算机上求解描述流体运动、传热和传质的偏微分方程组,并且对上述现象进行过程模拟。
CFD技术可用来进行流体动力学的基础研究,复杂流动结构的工程设计,了解在燃烧过程中的化学反应,分析实验结果等。
泵管阀管网系统虚拟仿真》
泵管阀管网系统虚拟仿真》利用虚拟现实技术实现城市供热管网运行参数动态显示。
针对目前供热系统信息系统多数是二维静态可视化系统,存在无法生动地表现具有三维特征的客观实体,建立空间拓扑关系比较困难的问题。
在充分考虑地理数据的复杂性和现有计算机软硬件技术的局限性的基础上,通过供热管网实际需求的空间数据库的数据模型与分布式环境下空间数据库的体系架构技术,以及基于GIS的空间分析技术、可视化技术和图纸的输入输出技术,实现系统动态数据显示与三维空间分析功能。
将地下难于显示的供热管网重要的特性与属性信息直观为学生展示。
利用虚拟现实技术建立城市供热管网水力与热力虚拟仿真模型,并通过对城市供热管网运行工况与故障工况进行动态可视化分析,显示不同工况条件下热网的温度、压力、流量等参数的分布情况,使学生直观地了解供热管网正常运行与故障运行时的重要特性。
利用虚拟现实技术模拟锅炉、循环水泵与调节阀等重要设备运行状态变化时的管网压力、流量与热用户温度变化规律。
通过调节锅炉运行台数、水泵运行频率以及调节阀开度,模拟仿真热网的水力与热力工况变化。
使学生能够更加直观地理解不同工况条件下管网的压力、流量与温度变化及其原因。
基于虚拟仿真平台,虚拟浮现突发条件下供热系统预警与应急技术。
模拟管道堵塞与泄露等突发事件条件下,供热管网的水力、热力工况变化情况,并模拟采用预警与应急技术后的实际效果。
使学生了解正常条件下无法观察的供热系统故障工况,提高对供热管网可靠性与相关的运行调度技术的认识与理解。
基于虚拟仿真平台,虚拟再现供热系统正常运行于故障工况下散热设备热工特性变化规律。
在了解系统宏观变化规律的基础上,模拟管网换热器、散热器及风机盘管等设备的热工特性变化规律。
加深学生对供热系统中相对微观的热媒温度场与速度场的理解,强化传热学等专业基础课程的教学效果。
利用虚拟仿真技术,虚拟再现集中空调系统中设备及管网的优化调节。
基于天气预报的空调系统优化运行表格节能调节方法,模拟冷水机组、冷冻水泵、冷却塔、冷却水泵、冷冻水管网、冷却水管网的健康及故障运行状态。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
平顶山工业职业技术学院毕业设计(论文)说明书
第四章中央水泵房的模拟仿真
在整个水泵系统就地控制箱上的指示灯信号有:高压柜合闸、高压柜短接电抗器、电动阀开到位、电动阀关到位、电动阀过转矩、真空度。
由PLC柜上的触摸屏和上位计算机组成的网络监控,触摸屏安装的是嵌入版的MCGS组态软件,上位计算机安装的是网络版的MCGS组态软件,两种组态软件的监视画面基本相同。
在组态软件的监视画面上,详细地显示了PLC控制系统各种工作状态和运行数据,使工作人员可以很方便地了解整个中原水泵系统的工作情况。
本设计采用的组态软件为北京昆仑通泰自动化软件科技有限公司研发的MCGS,具有功能完善、操作简便、可视性好、可维护性强的突出特点。
通过与其他相关的硬件设备结合,可以快速、方便的开发各种用于现场采集、数据处理和控制的设备。
MCGS是能够在Microsoft各种32位Windows平台上运行的开发工具,MCGS 的体系结构由主控窗口、设备窗口、用户窗口、实时数据库和运行策略5部分组成,如图5-1所示。
运行时,MCGS通过对现场实时数据的采集、处理,并以动画显示、流程控制、报警处理和报表输出等方式,防爆值班人员进行现场操作。
MCGS嵌入版组态软件专门应用于嵌入式操作系统,它适应于应用系统对功能、可靠性、成本、体积、功耗等综合性能有严格要求的专用计算机系统。
图5-1 MCGS体系结构图
用MCGS创建工程的流程图,如下图所示:
图5-2 工程的流程图
4.1 用户窗口组态
在用户窗口中,通过对多个图形对象的组态设置,建立相应的动画连接,用清晰生动的画面反映工业控制过程。
用户窗口是由用户来定义的、用来构成MCGS嵌入版图形界面的窗口。
用户窗口是组成MCGS嵌入版图形界面的基本单位,所有的图形界面都是由一个或多个用户窗口组合而成的,它的显示和关闭由各种功能构件(包括动画构件和策略构件)来控制[10]。
用户窗口相当于一个“容器”,用来放置图元、图符和动画构件等各种图形对象,通过对图形对象的组态设置,建立与实时数据库的连接,来完成图形界面的设计工作。
如下图所示:
图4-3 用户窗口
图4-4是在模拟仿真中的总泵房监视画面,在画面上可以观察到每个泵房的启停、水流状态、各个阀门的启停以及实时参数,从而实时的监控水泵的运行。
更加准确的控制和监视每个水泵,从而确保了矿井排水安全。
图4-4 泵房监视画面
图4-5为泵房的实时数据曲线,在画面上显示了水仓水位、总管压力、瞬时流量、前轴温度、出水压力、1#泵电流、2#泵电流、3#泵电流、4#泵电流、5#泵电流等参数的实时状况。
图4-5 实时数据曲线
图4-6为报警数据显示画面。
画面上显示了出水管压力,各个水泵的前轴温度,
各个水泵的出水压力,水仓水位,各个水泵的回水温度等报警。
图4-6 报警数据
图4-7是水泵监视画面,显示了系统参数、电量参数、水泵参数以及防爆电磁阀
的开关、真空泵的开关、水泵的开关等,其余水泵的监视画面也如图所示。
图4-7 一号水泵监视画面
图4-8为系统参数设定画面,画面上显示了运行模式的切换,真空泵的投入与切
除,水泵的投入与切除,PLC时钟同步,液位检测方式,限制设定等参数设定。
图4-8系统参数设定
4.2 设备窗口组态
设备窗口是MCGS嵌入版系统的重要组成部分,在设备窗口中建立系统与外部硬件设备的连接关系,使系统能够从外部设备读取数据并控制外部设备的工作状态,实现对工业过程的实时监控。
在MCGS嵌入版中,实现设备驱动的基本方法是:在设备窗口内配置不同类型的设备构件,并根据外部设备的类型和特征,设置相关的属性,将设备的操作方法如硬件参数配置、数据转换、设备调试等都封装在构件之中,以对象的形式与外部设备建立数据的传输通道连接。
系统运行过程中,设备构件由设备窗口统一调度管理。
通过通道连接,它既可以向实时数据库提供从外部设备采集到的数据,供系统其它部分进行控制运算和流程调度,又能从从实时数据库查询控制参数,实现对设备工作状态的实时检测和过程的自动控制[11]。
该系统在MCGS软件模拟仿真的过程中,每个参数是通过模拟量采集出来的,如下图所示:
图4-9 设备窗口
4.3 运行策略组态
所谓“运行策略”,是用户为实现对系统运行流程自由控制所组态生成的一系列功能块的总称。
MCGS嵌入版为用户提供了进行策略组态的专用窗口和工具箱。
运行策略的建立,使系统能够按照设定的顺序和条件,操作实时数据库,控制用户窗口的打开、关闭以及设备构件的工作状态,从而实现对系统工作过程精确控制及有序调度管理的目的[12]。
如下图所示:
图4-10 运行策略窗口
在运行策略中,报警语句为:
!SetAlmValue(水位,超限水位,80)
!SetAlmValue(水位,报警水位,60)
!SetAlmValue(水位,启动水位,40)
!SetAlmValue(水位,停机水位,20)。