2018年工业机器人技术操作技能竞赛规程
全国职业院校技能大赛工业机器人技术应用赛项(高职组)竞赛任务书
全国职业院校技能大赛工业机器人技术应用赛项(高职组)竞赛任务书选手须知:1.任务书共 17 页,如出现任务书缺页、字迹不清等问题,请及时向裁判申请更换任务书。
2.试题中分拣工件分为汇博平台和合心平台,参赛选手根据所选平台完成任务。
3.竞赛任务完成过程配有两台编程计算机,参考资料(包括PLC的I/O分配表,码垛机使用说明等)放置在“D:\参考资料”文件夹下。
4.参赛队应在4小时30分钟内完成任务书规定内容;选手在竞赛过程中创建的程序文件存储到“D:\技能竞赛\竞赛编号”文件夹下,未存储到指定位置的运行记录或程序文件均不予给分。
5.选手提交的试卷不得出现学校、姓名等与身份有关的信息。
6.由于错误接线、操作不当等原因引起机器人控制器及I/O组件、智能视觉系统、PLC、变频器、AGV机器人的损坏,将依据扣分表进行处理。
7.在完成任务过程中,请及时保存程序及数据。
场次:工位号:日期:竞赛设备描述:“工业机器人技术应用”竞赛在“HBHX-RCPS-C10型工业机器人技术应用实训平台”上进行,该设备由工业机器人、AGV机器人、托盘流水线、工件盒流水线、视觉系统和码垛机立体仓库等六大系统组成,如图1所示。
图1 竞赛平台结构图系统的工作目标是码垛机从立体仓库中取出工件放置于AGV机器人上部输送线,通过AGV 机器人输送至托盘流水线,由视觉系统对工件进行识别,然后工业机器人对工件进行分拣装箱。
图2为需要分拣的工件。
默认从左至右、从上到下工件编号为1-6号。
1 2 3 4 5 6图2 需要分拣的工件(汇博平台)1 2 3 4 56图2 需要分拣的工件(合心平台)托盘结构以及托盘放置工件的状态如图3所示,托盘两侧设计有档条,两条档条的中间为工件放置区。
图3 分拣工件放置于托盘中的状态系统中托盘流水线和工件盒流水线工位分布如图4所示。
图4 托盘流水线和流水线工位分布系统中主要模块的IP地址分配如下表1所示。
表1 主要功能模块IP地址分配表注意:码垛机单元的三个变频器的IP地址依次是:192.168.8.14;192.168.8.15;192.168.8.16选手不得用作其它模块。
2018年山东职业院校技能大赛中职组机器人技术应用赛项

23
I2.6
升降气缸 2 下限
24
I2.7
表 1-2 PLC 输出信号表
功能注解
序号
地址
升降气缸 1
13
Q1.4
升降气缸2
14
Q1.5
升降气缸 3
15
Q1.6
升降气缸 4
16
Q1.7
推动气缸 1
17
Q2.0
推动气缸 2
18
Q2.1
推动气缸 3
19
Q2.2
推动气缸 4
20
Q2.3
14
功能注解 升降气缸 3 上限 升降气缸 3 下限 升降气缸 4 上限 升降气缸 4 下限 推动气缸 1 伸出位 推动气缸 1 缩回位 推动气缸 2 伸出位 推动气缸 2 缩回位 推动气缸 3 伸出位 推动气缸 3 缩回位 推动气缸 4 伸出位 推动气缸 4 缩回位
图 1-11 检测单元 2 号工位电气接线连接 根据表 1-1 和表 1-2 提供的 PLC 的 IO 信号表,完成控制面板上的 PLC 控制 线路接线,并对线缆进行捆扎。 注意:不允许更改设备中原有的线路,只允许在如图 1-12 所示的面板正面 接线区域利用快接线缆完成 PLC 的 IO 的连接。
图 1-9 检测单元 2 号工位装配图纸
11
2. 利用竞赛工位所提供的工具和零件,完成检测单元 2 号工位的气缸气路连 接,能按要求可以实现工位安装台的推进缩回动作、检测灯的升降动作。
图 1-10 检测单元 2 号工位气动原理图
12
3. 利用竞赛工位所提供的工具和零件,完成检测单元 2 号工位的传感器、检 测灯、指示灯等的电路接线,并调整传感器的安装位置使其可准确反馈气缸状态。
2018年深圳技能大赛——机电一体化

2018年深圳技能大赛——机电一体化职业技能竞赛技术文件2018年深圳技能大赛——机电一体化职业技能竞赛组委会2018年10月一、竞赛项目、标准、方式及内容(一)竞赛项目。
机电一体化。
(二)竞赛标准。
参照第44届、第45届世界技能大赛相关技术要求与标准导向,结合近年国赛、省赛的内容和深圳企业生产实际情况以及我市行业企业的产业结构调整、产品升级换代和高新技术的发展需求,由组委会统一组织专家命题。
(三)竞赛方式。
本次竞赛分初赛和决赛两个阶段。
初赛为理论知识竞赛,决赛为实际操作竞赛。
1.理论知识竞赛理论知识由竞赛组委会组织专家命题,统一使用计算机理论闯关竞赛系统,采用上机考核方式进行,现场计算机自动判分。
第一关为基础知识,时间为30分钟;第二关为专业知识,时间为30分钟。
两关均实行百分制,60分为合格,第一关合格方可进入第二关。
最终以第二关成绩作为初赛成绩由高到低进行排名,职工组取前50名的选手进入决赛,学生组取前20名的选手进入决赛。
时间:2018年11月10日地址:深圳职业技术学院西丽湖校区。
2.实际操作竞赛实际操作竞赛由组委会组织专家命题,以现场实际操作—2—的方式进行。
选手进入赛场确认现场条件,领取竞赛项目任务书,根据任务书进行比赛。
实际操作竞赛分两个阶段进行,第一阶段为专业技能应用操作,第二阶段为综合应用操作;第一阶段成绩排名仅作为入围第二阶段的依据,赛后以第二阶段成绩作为决赛实际操作竞赛成绩。
第一阶段:专业技能应用操作参赛选手进行专业技能应用操作,满分为100分,60分为合格,竞赛时间为120分钟(以现场实操任务书规定为准)。
按第一阶段成绩排名,职工组取前21名、学生组取前14名的选手进入第二阶段。
时间:2018年11月24日地址:深圳职业技术学院西丽湖校区格物园A座5楼自动化技术实训室。
第二阶段:综合应用操作职工组前21名、学生组前14名的选手进行综合应用操作,根据任务书进行比赛。
满分为100分,60分为合格,竞赛时间为120分钟(以现场实操任务书规定为准)。
2018年深圳技能大赛——利元亨杯工业机器人技术应用操作职业技能竞赛实施方案【模板】

2018年深圳技能大赛——“利元亨杯”工业机器人技术应用操作职业技能竞赛实施方案为贯彻落实党的十九大提出“建设知识型、技能型、创新型劳动者大军,弘扬劳模精神和工匠精神,营造劳动光荣的社会风尚和精益求精的敬业风气”的精神,落实《国务院关于推行终身职业技能培训制度的意见》提出“采取技术比武、技能竞赛等方式,大幅提升职工技能水平”的举措,根据《xx市人力资源和社会保障局关于组织开展2018年深圳技能大赛活动的通知》(深人社发[2018]53号)总体安排,决定举办2018年深圳技能大赛——“利元亨杯”工业机器人技术应用操作职业技能竞赛,为保证竞赛顺利进行、取得实效,现结合实际,制定本实施方案。
一、竞赛宗旨全面贯彻落实党的十九大精神,开展职业技能竞赛活动,搭建技能人才展示技艺和相互学习的平台,培养和选拔一批在生产技术领域具有高超技能和创新能力的高技能人才,弘扬“工匠”精神,打造技能强市。
二、组织机构(一)举办单位。
主办单位:xx市机器人协会承办单位:xxXX公司协办单位:xx市机器人青年专家委员会深圳华数机器人有限公司xx市泰达机器人有限公司xx市世椿智能装备股份有限公司深圳第二高级技工学校支持单位:中国科学院深圳先进技术研究院广东利元亨智能装备股份有限公司技术指导单位:xx市职业技能鉴定指导办公室(二)竞赛组委会。
成立2018年深圳技能大赛——-“利元亨杯”工业机器人技术应用操作职业技能竞赛组织委员会(以下简称“组委会”),具体负责竞赛的各项工作,成员如下:主任:毕亚雷中国科学院深圳先进技术研究院院长助理xx市机器人协会秘书长副主任:贾彦xx市机器人协会副秘书长王卫军广州中国科学院先进技术研究院机器人与智能装备中心执行主任杜政志xx市机器人青年专家委员会秘书长成员:朱国云、余任冲、张兵、刘强、李岩、李俊、杨小彬(三)组委会办公室。
组委会下设办公室,具体负责竞赛的各项工作,成员如下:主任:贾彦xx市机器人协会副秘书长副主任:王卫军广州中国科学院先进技术研究院机器人与智能装备中心执行主任杜政志xx市机器人青年专家委员会秘书长成员:朱国云、余任冲、张兵、刘强、李岩、李俊、杨小彬、王基安组委会办公室设在xx市机器人协会,地址:xx市xx区西丽大学城学苑大道1068号,联系人:XXX,联系电话:********。
2018年安徽省职业院校技能大赛高职组工业机器人技术应用

2018年安徽省职业院校技能大赛高职组“工业机器人技术应用”项目竞赛规程一、竞赛项目名称工业机器人技术应用二、竞赛目的通过此次竞赛,考核选手工业机器人的装配技能、电气连接与编程调试技能、故障诊断与精度检验等核心技术技能,同时可考核参赛选手工作效率、质量意识、安全意识、节能环保意识和规范操作等职业素养等。
通过竞赛引领学校与企业、课程设置与职业岗位的深度衔接,以工业作业型机器人为载体瞄准制造业前沿技术,促进高职院校机电相关专业服务产业发展能力的提升,为机器人领域发展提供人才储备与支撑,促进工学结合人才培养和课程的改革与创新;促进工业机器人应用技术的普及;提升职业院校专业教师的指导水平。
三、竞赛方式与内容(一)竞赛方式1、竞赛采取团队比赛方式,每个参赛队由3名选手组成,3名选手须为同校2018年春季在籍学生(含本科院校高职学生,1994年5月1日之后出生),不限制性别、年级,其中队长1名,每支参赛队不超过两名指导教师。
每校不超过两支参赛队。
2、竞赛项目采用具体的工作任务要求、同样的工作条件。
比赛分批次进行,参赛队比赛的先后顺序由赛前抽签确定。
3、参赛队在规定时间内,以现场操作的方式,根据竞赛技术文件的具体要求,按照正确的操作步骤,利用赛场提供的设备、工具和技术资料,在规定的时间内完成规定的工作任务,并正确填写比赛记录表。
(二)竞赛内容根据《2018年安徽省职业院校技能大赛(高职组)实施方案》规定的该赛项的竞赛技术平台标准。
比赛内容要求:1)机器人关节模块的机械装配参赛选手根据赛项任务书要求完成机器人1~6个关节模块的机械装配任务。
2)电气控制系统接线参赛选手根据赛项任务书要求完成电气控制系统中电气线路连接的任务。
3)参数的设置参赛选手根据赛项任务书中驱动器相关参数表进行机器人相关的参数设置。
4)人机界面编程与调试参赛选手根据赛项任务书要求完成工业机器人的运动控制界面的制作与调试。
5)PLC编程与调试参赛选手根据赛项任务书要求的工作过程、控制要求和保护要求等,编制可编程控制器的控制程序。
2018 高职 工业机器人技术应用 试题6装配位入库和出库放置 裁判用(赛项赛卷)
2018 年全国职业院校技能大赛
工业机器人技术应用赛项(高职组)
竞赛任务书(附件)
任务五(裁判用)
注意:
1.该资料为选手任务五完成后申请评分时工件摆放的要求;
2.该资料必须是选手申请任务五评判时才给选手;
3.工件的摆放必须由选手根据下面要求自己摆放。
(1)成品装配位要求如下图1所示。
图1 成品装配位要求
(2)码垛机出库前托盘放置仓位及装配线备件库工位工件放置要求如图2所示。
图2码垛机出库前托盘放置仓位及装配线备件库工位工件放置要求
(3)码垛机入库完成后托盘放置仓位要求如下图3所示。
图3 码垛机入库完成后托盘放置仓位要求。
理论知识竞赛
附件3:2018年中国技能大赛—第二届全国智能制造应用技术技能大赛决赛竞赛规程理论知识竞赛全国组委会技术工作委员会二零一八年九月二十日目录1.理论知识竞赛的地位和作用∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙12.理论知识竞赛方式与内容∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙1 2.1理论知识竞赛类别∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙1 2.2理论知识竞赛方式及题型∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙22.3理论知识竞赛内容及范围∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙23.理论知识命题与组卷规则∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙4 3.1命题思路∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙4 3.2试题来源∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙53.3组卷原则∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙54.理论知识竞赛规则∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙65.理论知识竞赛成绩评定规则∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙∙62018年中国技能大赛——第二届全国智能制造应用技术技能大赛理论知识竞赛规程根据《人力资源社会保障部中华全国总工会中国机械工业联合会关于举办2018年中国技能大赛——第二届全国智能制造应用技术技能大赛的通知》(人社部函〔2018〕108号)精神,2018年中国技能大赛——第二届全国智能制造应用技术技能大赛(以下简称:大赛)全国组委会技术工作委员会特制定相关系列竞赛规程。
(智能制造)机器人技术应用赛项规程
(智能制造)机器人技术应用赛项规程2018年全国职业院校技能大赛拟设赛项规程一、赛项名称赛项编号:ZZ-2018014赛项名称:机器人技术应用英语翻译:RobotTechnologiesApplication赛项组别:中职组赛项归属产业:加工制造业二、竞赛目的随着《中国制造2025》战略规划的推进和制造业转型升级,工业机器人作为智能制造的重要终端设备,在汽车、电子、食品、化工、装备制造等行业中得到广泛应用,促使工业机器人技术综合性应用人才的需求日益增强。
为响应国家政策号召,配合产业发展,服务企业技术升级和转型,越来越多的职业院校开设了工业机器人技术应用及相关专业。
机器人技术应用赛项以工业机器人为核心单元,融合了工具快换、可编程逻辑控制器、气动驱动、传感器、智能视觉检测等先进应用技术,以工业机器人在计算机/通讯/消费类电子产品行业(3C行业)中最典型的异形芯片插件工序为应用背景,设计了包括机械及电气的装调、工业机器人的维护维修以及3C行业中典型的涂胶、码垛、分拣、装配等工作任务在内的考核内容,重点考察学生在工业机器人系统的安装、编程、调试、维护、维修及团队协作、质量控制、安全意识等方面的专业能力和职业素养,以及学生在工业机器人应用技术方面的综合职业能力。
赛项专家组根据中职教育教学的要求和特点设计了本赛项,搭建了比赛与教学一体化的竞技与交流平台,旨在引导中职院校工业机器人相关专业的人才培养模式改革、课程建设和考核评价方式的转变,推进以学生为主体的理实一体化教学实践,促进师资队伍专业能力和技术服务水平的提升,提高工业机器人专业的人才培养质量,切实解决工业机器人产业人才严重短缺的问题,提升工业机器人系统技术应用人才水平,助推《中国制造2025》,加快我国从制造大国向制造强国和从中国速度到中国质量的“双转变”。
三、竞赛内容本赛项围绕工业机器人实际应用系统,主要考察选手机电通用设备的机械及电气安装调试能力、工业机器人本体的基础操作和编程调试能力、利用计算机辅助软件对特殊应用工艺的编程及仿真能力、工业机器人结合PLC与视觉检测的综合应用及系统联调能力、工业机器人系统的日常维护和维修能力,以及实操过程中运用专业知识均衡功能实现、动作效率、成本控制的综合能力和选手的安全及环保意识。
9.2工业机器人应用技能竞赛—工业机器人装调维修技术比赛规则

2019第六届河南省大学生机器人竞赛业机器人装调维修技术一、竞赛项目赛项名称:工业机器人装调维修技术二、竞赛目的工业机器人作为智能制造核心装备之一,已经广泛的应用到各行各业。
赛项以“中国制造2025 ”为背景,针对工业机器人装调维修岗位,面向全国中等职业学校和高等院校机器人工程、工业机器人技术、机器人应用与维护、机电一体化和自动化技术等专业,注重将产业技术发展趋势、规律与院校的专业建设和人才培养规律有机结合,体现行业特色和产教协同发展、协同育人的理念,围绕真实工作过程、任务和要求设计竞赛内容,重点考查选手的实际动手能力、规范操作和创新创意水平,检验参赛选手的综合职业能力。
通过技能竞赛促进院校机器人相关专业的发展、课程建设以及人才培养质量,解决机器人产业迅猛增长与专业人才严重短缺的矛盾,提升机器人技能型人才水平和数量,服务智能制造领域。
三、竞赛内容竞赛需要参赛选手在270 分钟内,以工业机器人装调与维修实训平台作为竞赛平台,完成机器人机械结构装调、电气控制系统装调、零点标定与精度校准、工业机器人控制程序编制及工件搬运等多个任务。
1.按任务要求完成工业机器人机械结构拆装。
2.按任务要求完成工业机器人电气控制系统装调。
3.按任务要求完成工业机器人零点标定与机器人精度校准。
4.根据任务书要求和技术标准,对设备设定的故障通过智能故障训练系统进行排除。
5.根据任务书要求,对工业机器人、PLC、触摸屏进行通讯设置和联调,完成整体流程动作。
四、竞赛方式一)本赛项为团体赛,参赛队由2-3 名选手组成,不计选手个人成绩,统计参赛队总成绩进行排序。
二)每支参赛队由2-3名选手组成,指定1人为队长,学生组竞赛可以设置不超过2名指导教师。
三)竞赛采取多场次进行,由赛项组委会按照竞赛流程组织各领队参加公开抽签,确定各队参赛场次。
参赛队按照抽签确定的参赛时段分批次进入竞赛场地参赛。
五、竟赛流程正式竞赛的前一天,竞赛组委会安排选手和指导教师熟悉场地不允许动用设备),宣布竞赛纪律和有关规定,发放竞赛程序手册。
2018年山东职业院校技能大赛

2018年山东省职业院校技能大赛高职教师组“机器人技术应用”赛项竞赛规程一、赛项名称赛项名称:机器人技术应用赛项组别:高职教师组专业类别:装备制造二、竞赛目的竞赛以“中国制造2025”规划为背景,针对装备制造业转型升级对岗位技能提升的要求,面向我省高等职业院校的工业机器人技术等专业,引领高职院校工业机器人技术职业教育的方向,检验我省高职院校工业机器人技术等专业教师在机器人领域的理论知识和实践操作技能。
通过竞赛进一步培养高职院校教师的“双师”素质,促进人才培养模式与教学方法的改革与创新,提升全省高职院校工业机器人技术等专业技术技能型人才的培养质量。
三、竞赛内容与时间竞赛项目由“基础知识测试”、“课堂教学设计”和“实践操作”三个子赛项构成,每位参赛队员应全部完成上述三个子赛项竞赛。
若规定项目不能全部参加的,按实际参赛项目计分。
各子赛项的名称、比赛时长和成绩权重:(一)竞赛内容1.“基础知识测试”子赛项:该项目旨在考察选手专业知识和技能的掌握程度,主要内容包括工业机器人技术基础、工业机器人操作与编程、工业机器人虚拟仿真、机电一体化技术、网络通讯技术、传感与检测技术、PLC控制技术、液压与气动技术等方面的知识。
2.“课堂教学设计”子赛项:参赛教师在“工业机器人技术”、“PLC控制技术”及“机械机构设计应用”三门课程中根据自身特长任选一个,并就所选课程的一个课堂教学知识点进行课堂教学设计,现场讲解教学设计理念、组织过程、效果与创新等方面的实施情况。
该项目旨在考核教师的教学设计理念,以及在突出教学重点、突破教学难点、完成特定教学任务、信息化手段运用等方面的课堂教学设计能力。
3.“实践操作”子赛项:参赛教师要求在规定的时间内(120分钟)完成工业机器人末端夹具的安装、工业机器人激光切割应用(模拟)、工业机器人工件输送、搬运和打包等内容。
该项目重点考查参赛教师工业机器人技术领域的实践操作能力与创新能力。
比赛内容包括:(1)工业机器人末端夹具的安装根据比赛需求和实际的工程应用环境,利用竞赛平台提供的硬件设备、工具和技术文档资料,对工业机器人末端夹具、末端夹具所需的电路和气路进行安装和调试。
2018中国机器人大赛比赛规则

2018中国机器人大赛比赛规则空中机器人项目无人机大战水果项目2018中国机器人大赛空中机器人项目技术委员会2018年5月31日目录一、项目简介 (2)二、技术委员会 (3)三、赛项说明 (4)四、比赛场地及器材 (5)五、机器人要求 (6)六、评分标准 (6)七、赛程赛制 (7)一、项目简介近年来,空中机器人技术在各行各业的应用日益广泛,特别是民用无人机出现井喷式的发展,在航拍测绘、电力管线巡检、物流与农业植保等方面显示了强烈的需求预期。
随着需求的日益聚焦,多旋翼无人机技术和VTOL技术日益成熟,已经发展出了规模庞大的爱好者团体和诸多新兴的民用无人机技术公司。
为此,设置空中机器人比赛项目,引导青年学生发明新的技术,实践新的方法,交流和检验空中机器人创新成果,成为中国机器人大赛的迫切需要。
中国机器人大赛空中机器人比赛将根据无人机技术的热点和趋势,不断推出和调整比赛项目,为培养人才,推动产业发展提供一个交流和竞技的平台。
2018年空中机器人比赛设立的第一个项目将围绕多旋翼飞行机器人如何近距离的处理“目标”和“危险”物体展开。
比赛规则类似“水果忍者”平板电脑游戏,由气球模拟的“水果”从场地中央飘落,“水果”中还会夹杂“炸弹”,空中机器人要做出判断,哪些“水果”可以切,哪些是“炸弹”有危险!比赛对空中机器人的稳定性、机动性、快速定位识别球体能力提出了持续的挑战。
比赛的初期阶段在室内进行,在未来最高级的比赛中,空中机器人将能够接住人类抛来的气排球,并且以合适的角度弹回去。
比赛以研发人类的“飞行机器人伙伴”为终极目标,逐步涉及空中机器人与人类近距离接触时的结构、控制、定位、识别、规划和人机交互等前沿问题。
在2018年的比赛规则中,主要技术难点为:(1)自主研发、搭建参赛的空中机器人,采用先进的传感系统和控制系统;(2)在无GPS条件下,如何保持稳定的飞行高度和原地悬停;(3)如何识别空中的球体,确定目标和飞行器的相对位置并做出机动;(4)如何区别不同颜色的球体,并做出规避或者迎击的行为决策。
工业机器人技术应用

2018年江苏省高等职业院校技能大赛“工业机器人技术应用”赛项竞赛规程一、赛项名称工业机器人技术应用二、竞赛目的赛项以“中国制造2025”规划为背景,针对装备制造业转型升级对岗位技能提升的要求,引导职业院校关注行业在“工业机器人技术应用”方面的发展趋势及新技术的应用,促进工学结合人才培养模式和课程的改革与创新。
通过技能大赛,展示参赛选手维护、调试、操控机器人的技能,检阅参赛队组织管理、团队协作、工作效率、质量与成本控制、安全意识等职业素养,提升高职院校专业教师的指导水平,以赛促教,为工业机器人及系统在企业中的应用提供人才保障。
三、竞赛方式竞赛为团体赛。
每支参赛队最多由6人组成,其中领队1人(可由指导教师兼任),参赛选手3人(其中队长1人),指导教师2人。
四、竞赛内容参赛选手在规定时间(4小时30分钟)内,以现场操作的方式,根据赛场提供的有关资料和赛项任务书,完成基本赛项任务及综合赛项任务。
基本赛项任务:1.生产线空间位置调整、传感器安装及基本功能调试。
2.六关节机器人手爪的安装及手爪控制设备的安装调试。
3.六关节机器人参数设定、标定、现场示教编程及复现;六关节机器人安全工作区间建立。
4.AGV机器人上部输送线安装与调试;工业以太网络连接等。
5.按任务要求完成机器视觉系统的设定、流程编辑,实现托盘流水线上的缺陷工件检测和工件形状种类的识别、工件库建立及坐标变换。
6.完成满足控制要求的立库码垛机和主控系统的人机界面及PLC 控制程序编制。
7.主控PLC、触摸屏、六关节机器人、流水线、立体仓库的网络建立和程序联调测试。
综合赛项任务:1.由裁判将放有工件的托盘随机摆放到立库各仓位中,由立库码垛机根据赛项任务书的要求,依次取出托盘并放置到磁导AGV小车上。
2.磁导AGV小车每次可以携带3个托盘,沿着磁导线运动并对接到托盘流水线,自动完成立库与托盘流水线之间的工件运输。
3.托盘流水线上设置了视觉检测系统,通过对托盘上的工件进行识别,区分出不同的工件;并将托盘中工件的坐标数据传送到主控PLC 中。
《工业机器人技术应用竞赛》项目任务书
广州番禺职业技术学院第十届学生职业技能大赛
《工业机器人技术应用技能竞赛》项目任务书
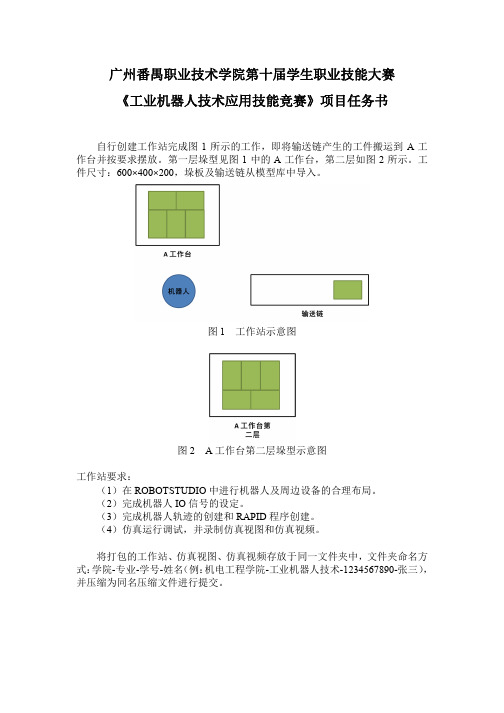
自行创建工作站完成图1所示的工作,即将输送链产生的工件搬运到A工作台并按要求摆放。
第一层垛型见图1中的A工作台,第二层如图2所示。
工件尺寸:600×400×200,垛板及输送链从模型库中导入。
图1 工作站示意图
图2 A工作台第二层垛型示意图
工作站要求:
(1)在ROBOTSTUDIO中进行机器人及周边设备的合理布局。
(2)完成机器人IO信号的设定。
(3)完成机器人轨迹的创建和RAPID程序创建。
(4)仿真运行调试,并录制仿真视图和仿真视频。
将打包的工作站、仿真视图、仿真视频存放于同一文件夹中,文件夹命名方式:学院-专业-学号-姓名(例:机电工程学院-工业机器人技术-1234567890-张三),并压缩为同名压缩文件进行提交。
2018机器人技术应用比赛项目

2018年天津市中等职业学校技能大赛中职组机器人技术应用赛项规程一、比赛时间、地点(一)比赛时间:2018年10月(具体时间另行通知)(二)比赛地点:天津市经济贸易学校(天津市西青区卫津南路239号)二、组织领导主办单位:天津市教育委员会承办单位:天津市经济贸易学校三、项目设置与内容要求(一)项目设置本届大赛为适应国家战略性新兴产业、先进制造业、智能制造发展需要和加快传统产业转型升级的需要,通过竞赛,考察并展示中等职业学校参赛选手对现代智能制造技术技能水平及与岗位相关的综合职业素养,引领中等职业学校适应行业现状及技术发展趋势,推进专业的教育教学改革,搭建校企合作育人平台,提升社会对职业教育的认可度。
比赛根据教育部中等职业学校现代制造技术技能比赛指导方案,紧密联系企业生产实际,赛题编制遵从公开、公平、公正原则。
参照全国技能大赛“机器人技术应用”项目的评分标准和评分方式等,做到赛项内容、竞赛规程、任务分配和评分设置与国赛接轨,组织专家命题。
(二)内容要求本赛项围绕工业机器人实际应用系统,主要考察选手机电通用设备的机械及电气安装调试能力、工业机器人本体的基础操作和编程调试能力、利用计算机辅助软件对特殊应用工艺的编程及仿真能力、工业机器人结合PLC与视觉检测的综合应用及系统联调能力、工业机器人系统的日常维护和维修能力,以及实操过程中运用专业知识均衡功能实现、动作效率、成本控制的综合能力和选手的安全及环保意识。
赛项采用团体比赛方式进行,两名参赛选手互相配合,协作完成竞赛任务。
各参赛队按照竞赛任务书的要求,在持续不间断的4小时内完成所有工作任务。
具体竞赛内容如下:任务一机械及电气安装调试根据任务书要求和技术标准,完成工具快换系统及4种工艺工具、异形芯片原料单元、异形芯片装配单元等部分的机械安装和电气安装,并对部分组件的动作进行调试和验证。
根据实际竞赛平台的布局情况,在离线编程软件中完成硬件环境的搭建。
任务二离线编程三维环境搭建利用现场提供的测量工具,完成对工作站台面上所有设备组件的布局尺寸测量。
2018年工业机器人技术操作技能竞赛规程

2018年“工业机器人技术操作技能竞赛”规程一、竞赛目的为了活跃校园文化生活、营造良好的学习气氛,加快我系教学改革与创新,提高学生自主创新意识和工程实践能力,增强学生的就业竞争能力。
二、竞赛时间与地点●竞赛时间:2018年6月15日 14:30-16:00。
●竞赛时长:1.5小时,全程封闭。
●竞赛地点:2506三、竞赛形式●个人赛。
●选手答题过程中不允许访问互联网,也不允许使用本机以外的资源(如手机、USB连接)。
四、竞赛平台HKARB-1工业机器人应用实训系统由工作台工作站、机器人本体工作站、搬运码垛工作站、压铸工作站、控制系统、气动系统组成。
机器人系统使用ABB IRB 120工业机器人,此款机器人是ABB推出一款迄今最小的多用途工业机器人--紧凑、敏捷、轻量的六轴IRB 120,仅重25kg,荷重3kg(垂直腕为4kg),工作范围达580mm。
PLC控制系统使用三菱FX3u-48MR,三菱FX系列PLC的新产品FX3U与之前的FX系列产品相比其定位功能得到了提高,PLC主体的脉冲输出由两个增加到三个,分别为Y0、Y1、Y2,频率为100KHz。
五、成绩评定从以下几个方面进行评分1 安全操作2 动作的实现3 工作效率4 节能六、奖项、奖品设计本次竞赛设一等奖、二等奖和三等奖,由机电工程系颁发获奖证书七、比赛规则1、赛前20分钟,选手凭身份证或学生证进入规定的考场,无证件者禁止入场。
2、选手入场除必要的文具,禁止携带任何书籍、资料、笔记、U盘以及各种通信工具。
携带手机的选手须关闭手机,并按照监考老师要求将手机存放在指定位置。
3、迟到的选手不得进入考场,开考1小时后方可交卷出场,出场后不能再进考场续考。
4、比赛限时1.5小时,若比赛期间因为机器故障等原因导致不能正常答题,组委会将根据具体情况为受影响选手适当延长比赛时间。
5、比赛过程中,选手必须保持安静,严格遵守考场纪律,不准交头接耳、左顾右盼,不准偷看,抄袭他人答案,不准夹带、冒名替考,更不准参赛选手和其他选手交谈及分享任何资料;6、比赛期间,所有参赛者必须关闭手机,违者取消比赛资格。
2018中国机器人大赛比赛规则
原则上由各队报名表上的指导老师在赛前抽签确定分组与赛程。 如指导老师缺席,非特殊情况下,视为弃权,其他人不能替代。 比赛分组及对阵方法:
比赛分为小组赛和淘汰赛,赛前领队会议时以抽签方式进行小组 赛的分组。根据参赛队伍数量的不同灵活分组,原则上每个组不超过 4 支队伍,不少于 3 支队伍。同一个小组的每个队伍分别对阵,获胜 积 3 分,负不得分,平局积 1 分,并记录净胜小分。 小组排名方法:
2018 中国机器人大赛比赛规则 武术擂台赛项目
无差别 2vs2 项目
2018 中国机器人大赛武术擂台赛项目技术委员会 2018 年 5 月 14 日
2018 中国机器人大赛比赛规则
目录 一、项目简介............................................................................................. 1 二、技术委员会......................................................................................... 1 三、赛项说明............................................................................................. 1 四、比赛场地及器材................................................................................. 3 五、机器人要求......................................................................................... 4 六、评分标准............................................................................................. 6 七、赛程赛制............................................................................................. 7
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2018年“工业机器人技术操作技能竞赛”规程
一、竞赛目的
为了活跃校园文化生活、营造良好的学习气氛,加快我系教学改革与创新,提高学生自主创新意识和工程实践能力,增强学生的就业竞争能力。
二、竞赛时间与地点
●竞赛时间:2018年6月15日 14:30-16:00。
●竞赛时长:1.5小时,全程封闭。
●竞赛地点:2506
三、竞赛形式
●个人赛。
●选手答题过程中不允许访问互联网,也不允许使用本机以外的资源(如手机、
USB连接)。
四、竞赛平台
HKARB-1工业机器人应用实训系统由工作台工作站、机器人本体工作站、搬运码垛工作站、压铸工作站、控制系统、气动系统组成。
机器人系统使用ABB IRB 120工业机器人,此款机器人是ABB推出一款迄今最小的多用途工业机器人--紧凑、敏捷、轻量的六轴IRB 120,仅重25kg,荷重3kg(垂直腕为4kg),工作范围达580mm。
PLC控制系统使用三菱FX3u-48MR,三菱FX系列PLC的新产品FX3U与之前的FX系列产品相比其定位功能得到了提高,PLC主体的脉冲输出由两个增加到三个,分别为Y0、Y1、Y2,频率为100KHz。
五、成绩评定
从以下几个方面进行评分
1 安全操作
2 动作的实现
3 工作效率
4 节能
六、奖项、奖品设计
本次竞赛设一等奖、二等奖和三等奖,由机电工程系颁发获奖证书
七、比赛规则
1、赛前20分钟,选手凭身份证或学生证进入规定的考场,无证件者禁止入场。
2、选手入场除必要的文具,禁止携带任何书籍、资料、笔记、U盘以及各种通信工具。
携带手机的选手须关闭手机,并按照监考老师要求将手机存放在指定位置。
3、迟到的选手不得进入考场,开考1小时后方可交卷出场,出场后不能再进考场续考。
4、比赛限时1.5小时,若比赛期间因为机器故障等原因导致不能正常答题,组委会将根据具体情况为受影响选手适当延长比赛时间。
5、比赛过程中,选手必须保持安静,严格遵守考场纪律,不准交头接耳、左顾右盼,不准偷看,抄袭他人答案,不准夹带、冒名替考,更不准参赛选手和其他选手交谈及分享任何资料;
6、比赛期间,所有参赛者必须关闭手机,违者取消比赛资格。
7、比赛直接进行决赛,没有初赛和复赛。
8、作品提交:竞赛任务完成或时间到之时,各选手必须将所画图文件以自己“班级+学号+姓名”命名,提交到指定处以便评委评分;未提交或提交不全者后果自负。
9、选手离开考场后不准在考场附近逗留和交谈。
10、选手应自觉服从监考老师管理,不得以任何理由妨碍监考老师进行正常工作。
监考老师有权对考场内发生的问题按规定作出处理。
一经发现做弊,此次竞赛作零分处理,并给予相应的处分。