第六章 非线性规划
第6章非线性规划
x1 + 2 x 2 ≤ 10 x1 , x 2 ≥ 0
能源 产量y 产量
生产资料1 生产资料 (x1) 1
生产资料2 生产资料 (x2) 2
能源 原理
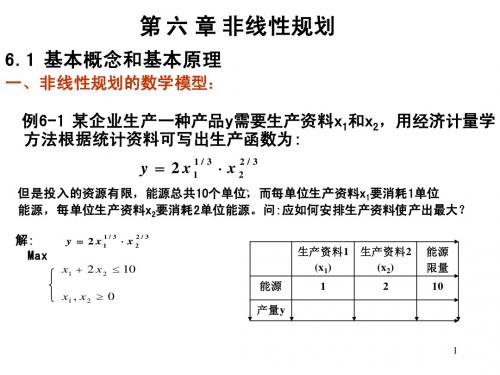
一、非线性规划的数学模型: 非线性规划的数学模型:
目标函数或约束条件中有非线性函数的规划问题。 目标函数或约束条件中有非线性函数的规划问题。 一般形式: 一般形式:
2 例 : 判断函数凹凸性 : f ( X ) = 3 x 1 + 2 x 2 − 2 x 1 − x 2 + 10 2
∂2 f (X ) ∂x12 解∵ H = 2 ∂ f (X ) ∂ x ∂x 2 1
∂2 f (X ) ∂ x1 ∂ x 2 6 = ∂ 2 f ( X ) 0 2 ∂x 2
六、寻优方法概述: 寻优方法概述:
1、N.L.P.问题分类 无约束条件的NLP问题。 NLP问题 ① 无约束条件的NLP问题。 有约束条件的NLP问题。 NLP问题 ② 有约束条件的NLP问题。 2、寻优方法 间接法(解析法) 适应于目标函数有简单明确的数学表达式。 ① 间接法(解析法):适应于目标函数有简单明确的数学表达式。 直接法(搜索法) 目标函数复杂或无明确的数学表达式。 ② 直接法(搜索法):目标函数复杂或无明确的数学表达式。 消去法(对单变量函数有效) a.消去法(对单变量函数有效): 不断消去部分搜索区间,逐步缩小极值点存在的范围。 不断消去部分搜索区间,逐步缩小极值点存在的范围。 爬山法(对多变量函数有效) b.爬山法(对多变量函数有效): 根据已求得的目标值,判断前进方向,逐步改善目标值。 根据已求得的目标值,判断前进方向,逐步改善目标值。
第六讲线性规划与非线性规划
(2)若有非线性约束条件:c1 x 0 或c2 x 0, 则建立M
文件c.m定义函数c1 x,c2 x, 一般形式为
function [c1,c2]=c(x)
c1=…
c2=… (3)建立主程序。求解非线性规划的函数是fmincon,
调用格式为 x=fmincon(‘fun’,x0,A1,b1);
故它属于一个整数线性规划问题,这里当成一个线 性规划求解,求得最优解刚好是整数x1=9,x2=0, 故它就是该整数规划的最优解.若用线性规划解法求 得的最优解不是整数,将其取整后不一定是相应整 数规划的最优解,这样的整数规划应用专门的方法 求解.
二、非线性规划
1、二次规划
❖
标准形式:min
z
1
xT
x1 4x2 5
•
x1, x2 0
❖
改写成标准形式:min z
x1 2x2
1 2
x12
1 2
x22
s.t.
2x1 3x2 x1 4x2
6 5
0 0
0 0
x1 x2
❖ 建立M文件fun1.m
❖ 建立主程序(见MATLAB程序(feixianxingguihua1))
工费用如下表.问怎样分配车床的加工任务,才能既满足加
工工件的要求,又使加工费用最低?
车床 类型
甲
乙
单位工件所需加工台时数 工件 1 工件 2 工件 3
0.4
1.1
1.0
0.5
1.2
1.3
单位工件的加工费用 工件 1 工件 2 工件 3
13
9
10
11
12
8
可用台 时数
800
第6讲 非线性规划

1 gi X
其中称r lng i X 或 r
i 1 i 1
m
m
1 为障碍项,r为障碍因子 gi X
X D
这样问题()就转化为求一系列极 1 值问题: k min I X , rk 得 X (rk) 0
10
内点法的迭代步骤
(1) 给定允许误差 0 ,取r1 0,0
k1
5) 判断精度: j 1,, n , 若 则点 X 为近似最优解;
k j
否则,令 k 1 k j 1,, n ,k=k+1,返回步骤(2). j j
14 返回
1、二次规划
标准型为: Min Z= 1 XTHX+cTX
2
s.t. AX<=b
m k
m
返回(3) .
11
近似规划法
近似规划法的基本思想:将问题(3)中的目标函数 f X
和约束条件 g i X 0 (i 1,..., m); h j X 0 ( j 1,, l )
近似为线性函数,并对变量的取值范围加以限制,从
而得到一个近似线性规划问题,再用单纯形法求解之,
i 1 j 1
(2)
将问题( )转化为无约束问题: minn T X , M 1
X E
(3)
其中T(X,M)称为罚函数,M称为罚因子,带M的项称为罚项,这 里的罚函数只对不满足约束条件的点实行惩罚:当 D 时,满 X 足各 i X 0, hi X 0 ,故罚项=0,不受惩罚.当 D 时, g X 必有 0或hi X 0 的约束条件,故罚项>0,要受惩罚. gi X
chapter 6 非线性规划
– 3. 函数的凸性的判别 – 定理6.1(一阶条件) 设R是n维欧式空间上的开凸
集,f(X)在R上具有一阶连续偏导数,则f(X)为R上 的凸函数的充分必要条件是,对于任意两个不同点 X(1)∈R和X(2)∈R,恒有
– 此外,若将上述关于凸函数定义中两个不等式中 的不等号改为“≥”和“>”,则分别称f(X)为凸集R 上的凹函数和严格凹函数。
– 2. 凸函数的性质
(1)若f(X)为凸函数,则-f(X)必为凹函数,反之亦 然;
(2)若f(X)为凸集R上的凸函数,则对于任意非负实 数α,函数αf(X)亦为凸集R上的凸函数;
chapter 6 非线性规划
chapter 6 非线性规划
概述
一、问题提出
– 生产管理中很多问题的运行过程都是以非线性形式运 行的,如生产成本往往是生产量的非线性函数,产品 的需求量是其价格的非线性函数等等。这样,我们在 建立一个决策问题的数学模型时,目标函数或者约束 条件常常会出现非线性形式。
f ( X (2) ) f ( X (1) ) f ( X (1) )T ( X (2) X (1) )
定理6.2(二阶条件) 设R是n维欧式空间上的某一 开凸集,f(X)在R上具有二阶连续偏导数,则f(X)为 R上的凸函数的充分必要条件是:f(X)的海森矩阵 H(X)在R上处处半正定。
– 6. 全局最优解——对于非线性规划min f = f(X),gi(X) ≥ 0 (i = 1,2,…,l;),设X0∈R,对于任何X∈R均有f(X0) ≤ f(X), 则称X0为非线性规划问题在R上的一个全局最优解。若
X0≠X时,f(X0) < f(X)严格成立,称X0为严格全局最优解。
第六章 非线性规划基本概念与基本原理
(6-1)
式 中 x ( x1 , x2 ,L , xn )T Rn , 是 n 维 向 量 ,
f , hi (i 1,2,, m), g j ( j 1,2,,l) 都 是 Rn R 的 映 射 ( 即 自 变 量 是
n 维向量,因变量是实数的函数关系).
6.1.3 基本概念
设 ( x1, x2) 表 示 供 应 中 心 的 待 定 位 置 ( 坐 标 ), 而 ( ai, bi) 是 第 i 个用户的所在位置,则问题的目标函数是
min{max[ ai x1 bi x2 ]}
x1 , x2
1im
这个式子意昧着,首先对(x1, x2)的每个可能值求出指标 I,使方括 号中的矩形距离最大;其次在依赖于(x1, x2)的所有最大距离中求出 最小的.如果每一位置(x1, x2)都可以接受,那么问题是无约束的; 如果还有其他限制,例如供应中心到某几个用户的距离必须在某个范
特征值都大于零的 实对称矩阵 特征值都不小于零 的实对称矩阵
所有各阶顺序主子式都大于零,即
det Ai 0(i 1,2,, n) det A 0 且det Ai 0(i 1,2,, n 1)
负定矩阵
半负定矩 阵
特征值都小于零的 实对称矩阵 特征值都不大于零 的实对称矩阵 特征值既有大于零
det
Ai
0(i为奇数) 0(i为偶数)(i
1,2,,
n)
det
A
0
且
det
Ai
0(i为奇数) 0(i为偶数)(i
1,2,,
n
1)
有两个奇数阶顺序主子式,其中一个为正,另
非线性规划
非线性规划什么是非线性规划?非线性规划(Nonlinear Programming,简称NLP)是一种数学优化方法,用于求解包含非线性约束条件的优化问题。
与线性规划不同,非线性规划中的目标函数和约束条件都可以是非线性的。
非线性规划的数学表达式一般来说,非线性规划可以表示为以下数学模型:minimize f(x)subject to g_i(x) <= 0, i = 1, 2, ..., mh_j(x) = 0, j = 1, 2, ..., px ∈ R^n其中,f(x)是目标函数,g_i(x)和h_j(x)分别是m个不等式约束和p个等式约束,x是优化变量,属于n维实数空间。
非线性规划的解法由于非线性规划问题比线性规划问题更为复杂,因此解决非线性规划问题的方法也更多样。
以下列举了几种常用的非线性规划求解方法:1. 数值方法数值方法是最常用的非线性规划求解方法之一。
它基于迭代的思想,通过不断优化目标函数的近似解来逼近问题的最优解。
常见的数值方法有梯度下降法、牛顿法、拟牛顿法等。
2. 优化软件优化软件是一类针对非线性规划问题开发的专用软件,它集成了各种求解算法和优化工具,可以方便地求解各种类型的非线性规划问题。
常见的优化软件有MATLAB、GAMS、AMPL等。
3. 线性化方法线性化方法是一种将非线性规划问题转化为等价的线性规划问题的求解方法。
它通过线性化目标函数和约束条件,将非线性规划问题转化为线性规划问题,然后利用线性规划的求解方法求解得到最优解。
4. 分类方法分类方法是一种将非线性规划问题分解为若干个子问题求解的方法。
它将原始的非线性规划问题分解为多个子问题,然后将每个子问题分别求解,并逐步逼近原始问题的最优解。
以上仅是非线性规划求解方法的一小部分,实际上还有很多其他的方法和技巧可供选择。
在实际应用中,选择合适的方法和工具是非常重要的。
非线性规划的应用非线性规划在实际生活和工程中有着广泛的应用。
第6章 非线性规划

97第六章* 非线性规划前面几章,我们论述了线性规划及其扩展问题,这些问题的约束条件和目标函数都是关于决策变量的一次函数。
虽然大量的实际问题可以简化为线性规划及其扩展问题来求解,但是还有相当多的问题很难用线性函数加以描述。
如果目标函数或约束条件中包含有非线性函数,就称这样的规划问题为非线性规划问题。
由于人们对实际问题解的精度要求越来越高,非线性规划自20世纪70年代以来得到了长足的发展;目前,已成为运筹学的一个重要分支,在管理科学、最优设计、系统控制等许多领域得到了广泛的应用。
一般来讲,非线性规划问题的求解要比线性规划问题的求解困难得多;而且也不象线性规划问题那样具有一种通用的求解方法(单纯形法)。
非线性规划没有能够适应所有问题的一般求解方法,各种方法都只能在其特定的范围内发挥作用。
本章在简要介绍非线性规划基本概念和一维搜索的基础上,重点介绍无约束极值问题和约束极值问题的求解方法。
§1非线性规划的数学模型1.1 非线性规划问题[例6-1] 某商店经销A 、B 两种产品,售价分别为20和380元。
据统计,售出一件A 产品的平均时间为0.5小时,而售出一件B 产品的平均时间与其销售的数量成正比,表达式为n 2.01+。
若该商店总的营业时间为1000小时,试确定使其营业额最大的营业计划。
解:设1x 和2x 分别代表商店经销A 、B 两种产品的件数,于是有如下数学模型:2138020)(m ax x x x f +=10002.05.02221≤++x x x0,021≥≥x x98 [例6-2] 在层次分析(Analytic Hierarchy Process , 简记为 AHP )中,为了进行多属性的综合评价,需要确定每个属性的相对重要性,即它们各自的权重。
为此,将各属性进行两两比较可得如下判断矩阵:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=nn n n a a a a J 1111其中:ij a 是第i 个属性与第j 个属性的重要性之比。
《非线性规划》课件

非线性规划的约束条件
非线性规划的约束条件是指限制问题解的一组方程或不等式。这些约束条件可以包括物理限制、资源约 束和行为限制等。
非线性规划的求解方法
线性化方法
将非线性问题转化为等价的 线性问题,然后使用线性规 划方法求解。
牛顿法
使用牛顿迭代法逐步逼近最 优解。
拟牛顿法
使用近似Hessian矩阵的方法 优化牛顿法。
变尺度法、全局优化方法
1
变尺度法
通过改变尺度,将问题转化为更易求解的形式。
2
全局优化方法
使用启发式算法寻找全局最优解。
非线性规划的应用领域
生产计划问题
优化生产计划,提高效率和利润。
交通运输问题
优化交通网络和运输流程。
优化电力系统
使电力系统运行更加高效和可靠。
决策支持系统
为决策者提供优化建议和决策支持。
医资源分配和治疗方案。
非线性规划的挑战
复杂的问题结构和求解困难。
未来的研究方向
未来的研究方向包括改进算法性能、适用于大规模问题的方法和考虑不确定性的优化模型等。
《非线性规划》PPT课件
在这个《非线性规划》PPT课件中,我们将深入探讨非线性规划的各个方面, 并介绍其在不同领域的应用。让我们一起开启这个激动人心的学习之旅!
什么是非线性规划?
非线性规划是一种在优化问题中寻找最优解的数学方法。它处理的是有非线 性约束条件和目标函数的优化问题。
非线性规划的优化目标
第六章 非线性规划基本概念与基本原理
量 x 的一阶导数.特别地,一元函数的海赛矩阵就是二阶导
数.
在微积分中已经证明过,当 f (x )的二阶偏导数连续时, 混合偏导数与求导顺序无关,即
2 f (x) 2 f (x) (i 1,2,, n; j 1,2,, n) xix j x jxi 此时,▽2f (x )是对称矩阵.函数在某一点 x(0)处的海赛矩 阵就是将 x(0)的各分量值代入(6-9)中矩阵各元素(二阶偏 导函数)即可.
定义 6-3 设 f (x)为定义在 n 维欧氏空间 R n 中的某一区域 S 上的
n 元 实 函 数 , 其 中 x (x1, x2 ,, xn )T . 对 于 x*∈ S, 若 存 在 某 个 ε >0,
对任意的 x∈S 均有 f (x)≥f (x*),则称 x*为 f (x )在 S 上的全局极小点, f (x* )为全局极小值.若对于所有 x∈S 且 x≠x*都有 f (x) > f (x*) ,则 称 x *为 f (x )在 S 上的严格全局极小点,f (x * )为严格全局极小值.
S 2x12 2x1x2 x12
构 件 的 体 积 为 半 球 体 和 圆 住 体 之 和 ,所 以 若 要 使 构 件 的 体 积 为 定 值 V0, 应该满足条件
2 3
x13
x12 x2
V0
又构件的底半径和圆柱体之高显然非负,故还要求
因此本例的数学模型为
x1≥0, x2≥0
min S 2x12 2x1x2 x12
的缩写.
例 6-2 定 位 问 题 假 设 要 选 定 一 个 供 应 中 心 的 位 置 ,由 这 个 中 心 向 城 市 中 位 置 固 定 的 m 个 用 户 提 供 服 务 中 心 供 应 的 商 品 ,可 以 是 电 、水 、 牛奶和其他货物,供应中心的设置定位准则是使从中心到用户的“距 离”最小.例如,可以是使中心到各用户的最大距离为最小,假定在 这个城市里货物必须沿互相垂直的路线(街道)供应,那么合适的距 离函数就是矩形距离.下面列出其数学模型:
大纲解读 第六章 非线性规划

(三)有约束极值问题 1、识记:(1)有约束极值问题,(2)起作用约 束,(3)可行下降方向,(4)K-T定理。 2、领会:(1)最优性条件,(2)二次规划, (3)罚函数法。 3、应用:(1)有约束问题的求解,(2)罚函数 法的应用。
大纲解读 第六章 非线性规划
一、考核知识点 (一)基本概念 (二)无约束极值问题 (三)有约束极值问题
(一)基本概念基本概念 1、识记:(1)非线性规划,(2)可行解与最优 解,(3)梯度,(4)海塞阵,(5)泰勒公式, (6)凸规划。 2、领会:(1)非线性规划问题,(2)极值条件, (3)凸函数与凹函数。 3、应用:非线性规划模型的建立。
西北农林科技大学运筹学课件第六章非线性规划
min f (X ) x1 x2 2x12 2x1x2 x22
f (X )
f
(X
)
x1 f (X
)
1 4x1 2x2 1 2x1 2x2
x2
X (1):
f
(
X(1))
1 -1
H
(
X(1))
4 2
2 2
X (1) (0,0)T 4 2
H(X ) 2 2
d(1 ) ( H (X (1 )) )1 f(X (1 )) 2 42 2 1 - 1 1
二、一维搜索
一维搜索方法的斐波那契法与黄金分割法的寻优途 径不是直接找出最优点,而是不断缩小最优点所处区域, 直到符合精度为止。这两种方法的主要特点为:①适于 单峰(谷)函数;②压缩峰(谷)点所处的区域
y
y
0 a a1 X′ b1 b
x
0 a a1 b1 X′ b
x
二、一维搜索
1.0.618法(黄金分割法)
F a )
tn1
a tn1
1 2(an2
bn20)
an2
(1 2
)
(bn2
an2)
k
k1
t1
k1 k1
n t'k11
b0
三、无约束极值问题
1.梯度法(最速下降法)
• 给定初始点X(1),允许误差ε>0,k=1 • 确定有利得搜索方向d(k)为X(k)点的负梯度方向 d(k) f(x(k)) • 判断精度
一、基本概念
2.二维问题的图解
考虑非线性规划问题
min
f (x) (x1 2)2 (x2 1)2 x1 x22 5x2 0
x1 x2 5 0
非线性规划课件

②再固定x₂=x₂ (1): 求以x₁为单变量的目标函数的极值点,
得 X(2)=(x,(2),x₂ (1))T ,S(2)=f(X(2))
此时S(2)优于S(1), 且搜索区间缩短为x₁*∈[x,(2),b,],x₂*∈[x₂ (1),b₂] 第二步:如此交替搜索,直至满足给定精度ε为止
否则,继续缩短区间,
直至满足给定的精度为
①f(x₂)≥f(xq), 取[aq=ao,b,=x,]
X₁ =X2
x'2=b₁-λ(b₁-aq) ②f(x₂)<f(x₁), 取[a=x2,b,=b,]
x=aq+λ(b₁-aq)
10
x₂ =x₁
例 求 解 f(x)=-18x²+72x+28 的极大值点,δ≤0.1,起始搜索区间为[0,3] 解:①用间接法:令 f'(x)=-36x+72=0, 得驻点 x=2
xq*∈[aq,b,],x²*∈[a₂ ,b₂ ],.,x*∈[an,b,]
1、原理: ①从起点 X(0) 出发,沿平行于 x, 轴的方向P(1)进行一维搜索,
求得 f(X) 在该方向P(1)上近似极值点 X(1);
②从点 X(1) 出发,沿平行于 x₂ 轴的方向P(2)进行一维搜索,
求得 f(X) 在该方向P(2)上近似极值点 X(2); ③从点 X(2) 出发,照此交替进行下去,直至满足给定的精度ε为止
六、 寻优方法概述:
1、N.L.P.问题分类
① 无约束条件的NLP问题。 ② 有约束条件的NLP问题。 2、寻优方法
① 间接法(解析法):适应于目标函数有简单明确的数学表达式。
非线性规划_基础理论_0505

ì ï min f ( x) ï ï ï ï í s.t . hi ( x) = 0 i = 1, 2, L p, p < n ï ï ï g j ( x) ? 0 j 1, 2, L m ï ï î hi (x) = 0, gj (x) 式中,x是n维欧氏空间Rn中的向量, f(展
自从1951年H. W. Kuhn及A. W. Tucker探讨了非线性规划解的最优性条件,为 非线性规划奠定了理论基础之后,非线性规划逐渐形成了一门十分重要且比较 活跃的新兴学科,出现了许多解非线性规划问题的有效的算法。由70年代开始, 该分支得到迅速发展:理论方面,非线性规划借鉴了数学理论中其他分支的成 果,逐步形成自身的学科特色;在应用方面,非线性规划为系统的优化和管理 提供了有力的工具。 随着电子计算机的应用,非线性规划在最优设计、管理科学、质量控制等许多 领域得到越来越深入的应用。非线性规划发展到今天,虽然已经提出许多求解 方法和策略,但是对于非线性规划的最优化问题目前还没有适于各种不同情况 的一般算法,各个方法都有自己特定的适用范围。因而,这是需要人们更深入 的进行研究的一个领域。
非线性规划的理论基础
凸函数和凸规划
上述有关最优化问题的极值点的定义描述了优化问题中解的判断条件,一 般而言,我们的优化过程实际上就是找极值点或者最值点的过程,但是上面的定义 往往并不便于执行,我们需要引入其他的手段进行分析和判断,故我们首先介绍凸 集、凸函数和凸规划的概念,在这类特殊的问题之中,极值条件有着其特殊性。 对于一个非线性规划的目标函数,有局部极小值和全局极小值的概念,那 么我们提出凸集和凸函数的概念就是为了区分目标函数的极小值在什么情况下是局 部极小值,什么情况下是全局极小值。 凸集 x(1) , x(2) 翁T Rn x = l x(1) + (1都有 - l ) x(2) T [0,1 ] " l ,若对于 设 则称T为凸集 用形象一点的语言描述就是凸集的特征是集合中任两点连成的线段必 属于这个集合。下图是二维空间中具有典型特征的凸集和非凸集的例子。
运筹学―第六章非线性规划精品PPT课件
F1 1 Fn1 Fn2
, n 2,3,
n 0 1 2 3 4 5 6 7 8 9 10 11 12 …
Fn 1 1 2 3 5 8 13 21 34 55 89 144
23 3
…
Fn1
1 2 3 5 8 13 21 34 55 89 144
Fn
1
2
3
5
8
13
21
34
55
89
144
… 233
hj (x) 0, j 1,...q
(NLP)
X
x
Rn
gi (x) hj (x)
0, i 1,..., p 0, j 1,..., q
约束集
如果(NLP)的约束集X是凸集,目标函数f是 X上的凸函数,则(NLP)叫做非线性凸规划, 或简称为凸规划。
凸规划的性质
定理 6.3 对于非线性规划(NLP),若 gi ( x), i 1,..., p 皆为 Rn 上的凸函数, h j ( x), j 1,..., q 皆为线性函数, 并且 f 是 X 上的凸函数,则 NLP 是凸规划。
性质 6.2 设 S Rn 是非空凸集, f : Rn R 是凸函数, c R ,则集合
H S ( f , c) x S f ( x) c
是凸集。
凸函数的判 定
定理 6.1 设 S Rn 是非空开凸集, f : S R 可微,则
(1) f 是 S 上的凸函数的充要条件是
f ( x1 )T ( x 2 x1 ) f ( x 2 ) f ( x1 ) , x1 , x 2 S
试获得 n 组 与 t 之间的实验数据 (ti , i ) ,
i=1,2,…,n。试确定参数 c1 , c 2 , c 3 ,
管理运筹学06非线性规划

对于大规模问题,梯度法可能会收敛到局部最优解而非全局 最优解。
牛顿法
优点
牛顿法具有二次收敛速度,即随着迭 代次数的增加,收敛速度会加快。
缺点
牛顿法需要计算目标函数的Hessian矩 阵,计算量大,且对于非凸问题,可 能陷入局部最优解。
拟牛顿法
优点
拟牛顿法具有类似于牛顿法的收敛速 度,但计算量较小。
解器。
SciPy的非线性规划求解器基于 优化算法,如梯度下降法和牛 顿法等,可以求解无约束和有
约束的非线性规划问题。
SciPy的接口简洁明了,易于使 用,适合Python程序员使用。
SciPy还提供了大量的示例和文 档,可以帮助用户更好地理解 和使用非线性规划求解器。
R语言
01 02 03 04
R语言是一种开源的统计计算语言,广泛应用于数据分析和统计建模 等领域。
THANKS FOR WATCHING
感谢您的观看
它通过迭代算法寻找使目标函数取得 极值的解,广泛应用于各种实际问题 的优化,如金融、物流、生产计划等 。
非线性规划的分类
约束优化问题
在给定的约束条件下最小化或最大化目标函数。
无约束优化问题
在无任何约束条件下最小化或最大化目标函数。
混合整数非线性规划问题
目标函数和约束条件中包含整数变量,且为非线性。
03
MATLAB的非线性规划求解器支持多种算法,包括内点法、梯度法、 牛顿法等,可以根据问题的规模和特性选择合适的算法。
04
MATLAB的用户界面友好,易于学习和使用,适合初学者和专家使用。
Python的SciPy库
SciPy是一个开源的Python数 学库,提供了大量的数学函数 和算法,包括非线性规划的求
第六章 非线性规划

证 充分性.设
f ( x1 )T ( x 2 x1 ) f ( x 2 ) f ( x1 ) x 1 , x 2 S
例1 曲线的最优拟合问题
已知某物体的温度 与时间 t 之间有如 下形式的经验函数关系: c1 c 2 t e c t (*) 其中 c1 ,c 2 ,c 3 是待定参数。现通过测 试获得 n 组 与 t 之间的实验数据( t i , i ) , c c c i=1,2,…,n。试确定参数 1 , 2 , 3 ,
* *
则x*称为局部最优解或局部极小点, 称f(x*)为局部最优值或局部极小值。 若使得
f ( x* ) f ( x), x N ( x* ) D, x x*
则称x*为严格局部最优解或严格局部极小点,
称f(x*)为严格局部最优值或严格局部极小值。
第8页
四、最优解和最优值
定义 2 对于非线性规划,若 x * D ,并且有 f ( x* ) f ( x ), x D 则称 x * 是(P)的全局最优解或全局极小点, 称 f ( x * ) 是(P)的全局最优值或全局极小值。
pk 构造搜索方向 p k,确定步长 t k 根据
令x k 1 x k t k pk
若x k+1已满足某种终止条件,停止迭代,输出 近似解. 否则令k:=k+1,转回第2步。
第13页
全局优化算法概述
全局优化方法可分为随机性方法和确定性方法. 随机性方法是按照某种规则随机产生迭代点, 迭代 点列依概率收敛到最优解,包括遗传算法,模拟退火 算法,神经网络算法等,这类方法具有对函数性质要 求低、容易实现等优点, 但效率低、可靠性差、不 能保证产生优化问题的最优解.
线性规划及非线性规划
例 求解线性规划
m a xz 2 0 x 1 3 0 x 2 4 7 x 3 ,
s.t.x1 x3 60,
x2
50,
x1
2x2
3x3
120,
x1,x2,x3 0.
35
解 启动Lingo,
在主窗口中输入
主窗口
model :
m a x 2 0 * x 1 3 0 * x 2 4 7 * x 3 ; x1x360; x250; x 1 2 * x 2 3 * x 3 1 2 0 ;
此时
c
8 10
,
2
A
1
1
2
,
b
11
1
0
.
25
输入语句
结果为
不能省略!!
即原问题的最优解为
x
4 3
,
f
62.
26
例 求解线性规划
m ax f 2 x1 3 x2 5 x3
s
.t
.
2
x1 x1
x2 5x
x3 2x
3
7 1
0
xi 0, i 1, 2, 3
a
2
1
x
1
a22 x2
b2 ,
a
m
1
x
1
am 2 x2
第6章 python 整数规划与非线性规划
目前,没有一种方法可以有效求解一切整数规划。常见的整数规划求解 算法有:
(1)分枝定界法:可求纯或混合整数线性规划; (2)割平面法:可求纯或混合整数线性规划; (3)隐枚举法:用于求解0 1整数规划,有过滤隐枚举法和分枝隐枚 举法; (4)匈牙利法:解决指派问题(0 1整数规划特殊情形); (5)蒙特卡罗法:求解各种类型规划。
i1
xij
0或1,
i, j 1,2,
, n,
第 13 页
(6.1)
第6章
6.1整数规划
第 14 页
这是一个纯0 1整数规划模型。 若将模型(6.1)中的cij组成一个n阶方阵C (cij )nn,则称C 为效率矩阵。 这样,标准指派问题中的工作效率就可以很方便地用矩阵C 来表示,并且效 率矩阵C 与标准指派问题一一对应。同样地,模型(6.1)的最优解也可以用 n阶方阵 X *的形式来表示,我们称之为指派问题的最优解方阵。由于标准指 派问题要求“每项工作需且仅需一个人去完成,每个人需完成且仅需完成一 项工作”,故最优解方阵一定是一个置换矩阵,即矩阵的每一行、每一列都 恰好有一个“1”,其余元素均为 0。
标准指派问题的一般提法是:拟分派n个人 A1, A2 , , An去完成n项工作 B1, B2 , , Bn,要求每项工作需且仅需一个人去完成,每个人需完成且仅需完 成一项工作。已知人 Ai 完成工作Bj的时间或费用等成本型指标值为cij,则应 如何指派才能使总的工作效率最高?
第6章
6.1整数规划
第6章
6.1整数规划
第 15 页
标准指派问题的数学模型表现为0 1整数规划的形式,当然可以通过整 数规划的分支定界法或0 1整数规划的隐枚举法来求得最优解。但标准指派 问题的数学模型具有独特的结构,因此,为提高求解的效率,1955 年美国 数学家 H. W. Kuhn 根据匈牙利数学家 D. König 关于矩阵中独立零元素定 理,提出了一个求解标准指派模型的有效算法—匈牙利算法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第六章 非线性规划由前几章知道,线性规划的目标函数和约束条件都是其自变量的线性函数,如果目标函数或约束条件中包含有自变量的非线性函数,则这样的规划问题就属于非线性规划。
第一节 基本概念一、 非线性规划的数学模型非线性规划数学模型的一般形式是⎪⎩⎪⎨⎧=≥==),,2,1(0)(),,2,1(0)()(min l j x g m i x h x f ji (6.1)其中,X=(n χχχ,,,21 )T 是n 维欧氏空间E n 中的点(向量),目标函数)(X f 和约束函数)()(X j X i g h 、为X 的实函数。
有时,也将非线性规划的数学模型写成 ⎩⎨⎧=≥),,2,1(0)()(min l j X g X f j (6.2)即约束条件中不出现等式,如果有某一约束条件为等式0)(=X g j ,则可用如下两个不等式约束替代它: ⎩⎨⎧≥-≥0)(0)(X g X g jj模型(6.2)也常表示成另一种形式:{}⎩⎨⎧=≥=⊂∈),,2,1(,0)(|),(min l j X g X R E R X X f j n (6.3)上式中R 为问题的可行域。
若某个约束条件氏“≤”不等式的形式,只需用“-1”乘这个约束的两端,即可将其变成“≥”的形式。
此外,由于[])(m in )(m ax x f X f --=,且这两种情况下求出的最优解相同(如有最优解存在),故当需使目标函数极大化时,只需求其负函数极小化即可。
二、二维问题的图解当只有两个自变量时,求解非线性规划也可像对线性规划那样借助于图解法。
考虑非线性规划问题⎪⎪⎪⎩⎪⎪⎪⎨⎧≥≥≥-+=-+-+-=000505)1()2()(min 212122212221x x x x x x x x x X f (6.4)如对线性规划所作的那样,在21Ox x 坐标平面画出目标函数的等值线,它是以点(2.1)为圆心的同心圆,再根据约束条件画出可行域,它是抛物线段ABCD (图6-1)。
现分析当自变量再可行域内变化时目标函数值的变化情况。
令动点从A 出发沿抛物线ABCD 移动,当动点从A 移向B 时,目标函数值下降;当动点有B 移向C 时,目标函数值上升。
从而可知,在可行域AC 这一范围内,B 点的目标函数值)(B f 最小,因而点B 时一个极小点。
当动点由C 向D 移动时,目标函数值再次下降,在D点(其坐标为( 4.1))目标函数值最小。
在本例中,目标函数值)(B f 仅是目标函数)(X f 在一部分可行域上的极小值,而不是在整个可行域上的极小值,这样的极小值称为局部极小值(或相对极小值)。
像B 这样的点称为局部极小点(或相对极小点)。
)(D f 是整个可行域上的极小值,称全局极小值(最小值),或绝对极小值;像D 这样的点称全局极小值(最小点),或绝对极小点。
全局极小点当然也是局部极小点,但局部极小点不一定是全局极小点。
三、几个定义下面给出有关局部极小和全局极小的定义。
设)(x f 为定义在n 维欧氏空间n E 的某一区域R 上的n 元实函数(可记为)(X f :R 1E E n →⊂),对于R X ∈*,如果存在某个0>ε,使所有与X *的距离小于ε的X R ∈(即X R ∈且ε *XX -),都有)()(*X f X f ≥,则称X *为)(X f 在R 上的局部极小点, )(*X f 为局部极小值。
若对于所有X *X ≠且X *的距离小于ε的R X ∈,都有)()(*x f x f >,则称X *为)(X f 在R 上的严格局部极小点,)(*X f 为严格局部极小值。
设)(X f 为定义在n E 的某一区域R 上的n 元实函数,若存在R X ∈*,对所有X R ∈都有)()(*X f X f ≥,则称X *为)(X f 在R 上的全局极小点,)(*X f 为全局极小值。
若对于所有X R ∈且X *X ≠,都有)()(*x f x f >,则称X *为)(X f 在R 上的严格全局极小点,)(*X f 为严格全局极小值。
如将上述定义中的不等号反问,即可得到相应极大点和极大值的定义。
下面仅就极小点和极小值加以说明,而且主要研究局部极小值。
四、多元函数极值点存在的条件二阶可微的一元函数 极值点存在的条件如下:必要条件:0)('=x f充分条件:对于极小点:0)('=x f 且0)(">x f 对于极大点:0)('=x f 且0)("<x f对于无约束多元函数,其极值点存在的必要条件和充分条件,与一元函数极值点的相应条件类似。
1. 必要条件下述定理1给出了n 元实函数)(X f 在X *点取得极值的必要条件。
定理1 设R 是n 维欧氏空间n E 上的某一开集,)(X f 在R 上有连续一阶偏导数,且在点R X ∈*取得局部极值,则必有0)()()(*2*1*=∂∂==∂∂=∂∂nx X f x X f x X f (6.5)或写成0)(*=∇X f (6.6) 此处Tn x X f x X f x X f X f ⎪⎪⎭⎫ ⎝⎛∂∂∂∂∂∂=∇)(,,)(,)()(*2*1**(6.7)为函数)(X f 在X *点处的梯度。
这个定理是显然的。
像一元函数那样,称满足条件(6.5)的点为稳定点(驻点)。
函数)(X f 的梯度)(X f ∇有两个十分重要的性质:(1)函数)(X f 在某点)0(X的梯度)()0(X f ∇必与函数过该点的等值面(或等值线)正交(设)()0(X f ∇不为零);(2)梯度向量的方向是函数值(在该点处)增加最快的方向,而负梯度方向则是函数值(在该点处)减少最快的方向。
2. 二次型二次型是Tn x x x X ),,,(21 =的二次齐次函数:2223223222211211221112222)(nnn n n n n x a x x a x x a x a x x a x x a x a X f +++++++++= =AX X x x aT n i nj j i ij=∑∑==11(6.8)式中,ji ij a a =,A 为n n ⨯对称矩阵。
若A 的所有元素都是实数,则称上述二次型为实二次型。
一个二次型惟一对应一个对称矩阵A ;反之,一个对称矩阵A 也惟一确定一个二次型。
若对任意X 0≠(即X 的元素不全等于零),实二次型AX X X f T=)(总为正,则称该二次型是正定的。
若对任意X 0≠,实二次型AX X X f T=)(总为负,则称该二次型是负定的。
若对某些X 0≠,实二次型0)(>=AX X X f T;而对另一些X 0≠,实二次型0)(<=AX X X f T ,即它非正定,又非负定,则称它是不定的。
若对任意X 0≠,总有0)(≥=AX X X f T ,即对某些X 0≠,0)(>=AX X X f T ,对另外一些X 0≠,0)(==AX X X f T ,则称该实二次型半正定。
类似地,若对任意X 0≠,总有0)(≤=AX X X f T ,则称其为半负定。
如果实二次型X TAX 为正定、负定、不定、半正定或半负定,则称它的对称矩阵A 分别为正定负定、不定、半正定或半负定。
由线性代数学知道,实二次型X TAX 为正定的充要条件,是它的矩阵A 的左上角各阶主子式都大于零。
即,011>a 22211211a a a a >0,333231232221131211a a a a a a a a a >0,nnn na a a a 1111,>0实二次型X TAX 为负定的充要条件是,它的矩阵A 的左上角顺序各阶主子式负、正相间,即,011<a 22211211a a a a >0,333231232221131211a a a a a a a a a <0,nnn nn a a a a 1111)1(,->0 例1 判定以下矩阵的正定性:A=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---402062225 B=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--031301110 解 对矩阵A :,0266225,052221121111>=--=<-=a a a a a,08042062225<-=---=A 故A 负定。
对矩阵B : ,10110,02221121111-===b b b b b故知B 不定。
3. 多元函数的泰勒(Taylor )公式 设n 元实函数)(X f 在)0(X 的某一邻域内有连续二阶偏导数,则可写出它在)0(X处的泰勒展开式如下:))(()(21)()()()()0(2)0()0()0()0(X X X f X X X X X f X f x f T T -∇-+-∇+= (6.9)其中,.10),()0()0(<<-+=θθX X X X若以X=X)0(+P 代入,则式(6.9)变为P X f P P X f X f P X f T T )(21)()()(2)0()0()0(∇+∇+=+ (6.10)其中,P XX θ+=)0(.也可将式(6.9)写成)())(()(21)()()()(2)0()0()0(2)0()0()0()0(X X X X X f X X XX Xf Xf X f T T-+-∇-+-∇+=ο (6.11) 其中,当)0(XX →时,⎪⎭⎫ ⎝⎛-2)0(XX ο是2)0(X X -的高阶无穷小,即0)(lim 2)0(2)0()0(=--→XX XX xx ο4. 充分条件*X 是)(X f 的极小点的充分条件由下面的定理2给出。
(定理2证明略) 定理2 设R 是n 维欧氏空间n E 上的某一开集,)(X f 在R 上具有连续二阶偏导数,若0)(*=∇X f ,且)(*2X f ∇正定,则R X ∈*为)(X f 的严格局部极小点。
此处)(*2X f ∇=2*22*21*22*222*212*21*221*221*2)()()()()()()()()(nn n n n x X f x X f x X f x x X f x X f x x X f x x X f x x X f x X f ∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂∂(6.11) 为)(X f 在点*X 处的黑塞(Hesse )矩阵。
若将)(*2X f ∇正定改为负定,定理2就变成了*X 为)(X f 的严格局部极大点的充分条件。
例2 研究函数2221)(x x X f -=是否存在极值点。
解 先由极值点存在的必要条件求出稳定点:112)(x x X f =∂∂ 222)(x x X f -=∂∂ 令0)(=∇X f ,即:021=x 和022=-x ,得稳定点 X=TTx x )0,0(),(21= 再用充分条件进行检验:2)(212=∂∂x X f 2)(222-=∂∂x X f 0)()(1222122=∂∂∂=∂∂∂x x X f x x X f 从而⎪⎪⎭⎫⎝⎛-=∇2002)(2X f 由于其黑塞矩阵)(2X f ∇不定,故TX )0,0(=不是极值点,而是一个鞍点。