机械手培训资料
机械操作手安全培训
机械操作手安全培训机械操作手是在生产和制造行业中执行机械操作任务的工人。
机械操作手工作涉及使用各种机械设备和工具,如起重机、叉车、钻床等。
由于操作的机械设备具有一定的风险和危险性,因此对机械操作手进行安全培训至关重要。
本文将介绍机械操作手安全培训的重点内容和培训方法。
机械操作手安全培训的重点内容主要包括以下几个方面:1. 机械设备的基本知识:培训应从机械设备的基本知识开始,包括机械设备的结构、原理、使用方法和注意事项等。
只有了解机械设备的基本知识,机械操作手才能正确、安全地操作机械设备。
2. 安全操作规程:机械操作手应熟悉并且遵守安全操作规程。
安全操作规程主要包括机械设备的操作步骤、安全警示标识的理解和遵守、安全保护装置的使用等。
机械操作手必须清楚地知道何时、何地以及如何正确地使用这些安全规程。
3. 个人防护装备的使用:为了保护机械操作手自身的安全,培训还应包括个人防护装备的使用。
常见的个人防护装备有安全帽、安全鞋、耳塞、护目镜等。
机械操作手应该明确自己在使用机械设备过程中需要采取哪些个人防护措施,以及如何正确地佩戴和使用这些个人防护装备。
4. 紧急情况和事故处理:机械操作手还应接受紧急情况和事故处理的培训。
培训应包括如何应对机械设备的故障和意外事故、如何正确地报告事故、如何进行急救等。
只有在紧急情况下保持冷静和正确的应对才能最大程度地减少事故造成的损失。
5. 安全意识的培养:最后,机械操作手的安全培训还应注重安全意识的培养。
机械操作手应时刻保持高度警惕,时刻注意周围的安全环境和潜在的危险因素,并且积极参与和推动安全工作。
机械操作手应尽可能地提高自己的安全意识,以确保自身和他人的安全。
机械操作手安全培训的方法主要有以下几种:1. 理论培训:通过课堂讲授的方式,机械操作手可以学习相关的安全知识和规程。
培训可以由专业的讲师进行,也可以通过自学的方式进行。
在理论培训中,可以结合实例进行培训,使机械操作手能更好地理解和应用所学知识。
机械手培训资料要点

(Robot)
广东凯宝机器人科技有限公司技术
部胡光民二零一二年三月
目录
一、机械手市场分析
二、现阶段机械手的特点
三、机械手产品相关知识解答
、机械手市埸翁栃
二现阶段机械手89W点
机邂燼嗣跨如加翩齡册询癥
•匚业机械手也是I.业机器人的一个两要分支。
•狀翳翻r熾锻歆瞬襯铀紗的他在构造和性能上兼有
•机械手作业的准确性和环境叩完成作业的能力.在国尺经济领域仃若广泛的发展勺•机械手的发展是山广它的积极作用匸日益为人们所认识:
共-、它能部分的代皆人【】操作:
具一八它能按照牛产「•艺的雯求.遵循•定的稈序、时间和位旨來完成I•件的传迄装卸:
英二、
詐貓釋卿臓魂餐娜'机辄轴號胡淤的动条件'
匂
苦的提谜
因而,受到很多国家的重视,投入人量的人力物力來研究和应用。
尤英是在高温、馭移如
料緞沪翻城邂黠紡翱辎为广泛。
在我国近几年U。
关于机械手安全培训

紧急停止按钮应定期检查和维护,确保其完好有效。同时,应对操作人员进行相关 培训,使其熟悉紧急停止按钮的使用方法和注意事项。
04 危险识别与风险评估方法
危险源识别技巧
01
02
03
观察法
通过直接观察机械手的运 行状态、工作环境等,识 别潜在的危险源。
持续改进
根据跟踪检查结果,不 断完善和改进安全管理 措施,提高机械手安全 性能。
06 法律法规与标准要求
国家相关法律法规解读
1 2
《中华人民共和国安全生产法》
强调生产经营单位必须遵守安全生产法律法规, 加强安全生产管理,确保安全生产。
《特种设备安全法》
明确规定了特种设备的生产、经营、使用、检验 、检测和监督管理等各环节的法律责任。
安全距离与空间要求
01
在机械手工作区域周围应设置足够的安全距离,以防止 人员误入危险区域。
02
机械手运动轨迹上不得存在障碍物或人员,以确保其运 动安全。
03
对于需要人员进入机械手工作区域的情况,应设置专门 的安全通道和防护措施。
紧急停止按钮使用方法
紧急停止按钮应设置在显眼且易于触及的位置,以便在紧急情况下能够迅速按下。
关于机械手安全培训
演讲人: 日期:
目录
• 机械手安全概述 • 机械手安全操作规范 • 机械手安全防护措施 • 危险识别与风险评估方法
目录
• 应急处理与事故报告制度 • 法律法规与标准要求 • 总结回顾与展望未来
01
机械手安全概述
机械手定义与功能
定义
机械手是一种能模仿人手和臂的 某些动作功能,用以按固定程序 抓取、搬运物件或操作工具的自 动操作装置。
机械操作手安全培训(三篇)

机械操作手安全培训一、培训目的机械操作手在工作中难免会接触到各种机械设备,如何确保他们的安全成为了一个非常重要的问题。
本次培训的目的是为了增强机械操作手的安全意识,提高他们的安全操作能力,减少事故发生的概率,确保他们的人身安全。
二、培训内容1. 机械设备的安全原理和结构:通常,机械设备都是由各种不同的部件组成,了解这些部件的功能和作用将帮助机械操作手更好地理解机械设备的工作原理,并且能够及时排除故障。
2. 安全操作规程:针对不同的机械设备,制定相应的安全操作规程,并详细讲解操作的步骤和注意事项,确保操作手能够正确地操作设备,避免意外事故的发生。
3. 安全防护装备的使用:根据机械设备的特点和工作环境,培训机械操作手正确使用各种安全防护装备,如头盔、防护眼镜、防护服等,以确保他们的人身安全。
4. 应急预案和逃生知识:培训机械操作手应急预案和逃生知识,使他们在紧急情况下能够冷静应对,确保自身的安全。
5. 规范操作和维护:培训机械操作手规范的操作和维护方式,让他们养成良好的操作习惯,延长设备的寿命,并减少事故的发生。
三、培训方式1. 理论讲授:通过讲解理论知识和案例分析,让机械操作手了解安全知识和操作规程。
2. 示例操作:通过示范操作,让机械操作手亲自实践,掌握正确的操作方法。
3. 视频演示:通过播放相关安全操作视频,让机械操作手直观地了解正确的操作流程和注意事项。
4. 应急演练:组织应急演练活动,模拟紧急情况,让机械操作手学会应对突发情况的方法和技巧。
四、培训效果通过本次培训,机械操作手应能够:1. 熟悉机械设备的工作原理和结构。
2. 掌握安全操作规程,减少事故发生的概率。
3. 了解并正确使用各种安全防护装备。
4. 掌握应急预案和逃生知识。
5. 养成规范操作和维护设备的习惯。
6. 提高安全意识,增强自我保护能力。
五、安全宣传培训结束后,还应进行相关安全知识的宣传活动,以进一步提高公司员工的安全意识。
可以制作宣传海报、宣传册等,在工作场所进行张贴,也可以通过内部通知、公司网站等渠道发布安全宣传信息。
机械手培训资料
机械手培训资料机械手培训资料(1/2)机械手是一种能够模拟人手动作的装置,被广泛应用于各个行业。
它能够实现反复精准的动作,可以提高生产效率,降低人力成本,并在一些危险环境中替代人手操作。
因此,学习机械手操作技能至关重要。
本文将为您提供一些有关机械手培训的基础知识。
首先,要学会操作机械手,必须先了解其主要组成部分。
机械手通常由机械臂、控制系统和附属设备组成。
机械臂负责模拟人手臂的运动,控制系统控制机械臂的运动轨迹和动作车补偿,而附属设备则包括传感器和工具等。
了解这些基本组成部分,有助于理解机械手的工作原理和操作方式。
其次,学习机械手操作需要掌握一些基础技能。
首先是对机械手的基本结构和零部件进行了解,包括机械臂的关节、连杆和手爪等。
然后需要学习机械手的运动学和动力学,即了解机械臂的运动规律和机械手的动作能力。
还需要学习机械手的编程和控制技术,以及相关的安全知识。
这些基础知识是学好机械手操作的前提。
在学习机械手操作时,还需要了解机械手的应用场景和操作流程。
机械手广泛应用于制造业、物流业、食品加工业等领域。
在不同的应用场景下,操作机械手的流程可能会有所不同。
因此,在培训过程中,要根据不同的应用场景,学习相应的操作流程和技巧。
此外,机械手操作时也需要注意安全事项。
机械手通常是由高速运动的电机驱动的,因此操作时要注意避免人员和设备受伤。
在操作前,要进行充分的安全检查,确保机械手和周围环境的安全。
同时,要严格按照操作规程进行操作,避免发生意外事故。
最后,机械手培训不仅需要理论学习,还需要进行实际操作训练。
只有通过实际操作,才能更好地掌握机械手的使用技巧和应用技术。
因此,在培训过程中,要安排足够的实操时间,让学员亲自操作机械手,熟悉各种操作技巧。
总而言之,机械手培训是学习机械手操作技能的必要步骤。
通过学习机械手的组成部分、基本知识、应用场景和操作流程,以及进行实操训练,可以提高机械手操作的熟练程度和技术水平。
希望本文能够为您对机械手培训提供一些有用的资料。
EPSON机械手培训-课件

刹车释放
马达报警时 重置马达
27
四、RC+5.4.3软件操作
6. 工具坐标设置
工具 →机器人管理器→工具或单击工具栏 图示
图标后,选择“工具”页面。如下
28
四、RC+5.4.3软件操作
(1)在“工具”画面单击“工具向导”,进入工具向导画面,选择工具坐标编号
29
四、RC+5.4.3软件操作
(2)选择好工具坐标编号后单击“NEXT”,进入如下画面,单击“Teach”进入机器人 示教画面
19
四、RC+5.4.3软件操作
2.控制器设置
(1)单击“设置” “控制器”进入控制器设置画面,然后单击“configuration” 设置控制的IP地址及控制方式,当要使用外部I/O控制时须将“Control Device” 远程I/O,然后单击“Apply”,再单击关闭,等待控制器重启完毕后,按“F5”, 单击“激活远程I/O”后关闭软件即可使用外部I/O控制控制器
21
四、RC+5.4.3软件操作
4. 示教点步骤
(1)在“点数据”页面中“点文件”下拉菜单中选择需要教点的点文件
单击选择点文件
22
四、RC+5.4.3软件操作 (2)在步进示教页面右下角位位置选择需要示教的点编号
单击选择要示教的点位
23
四、RC+5.4.3软件操作
(3)微动将机械手移动的需要示教点的位置。如果是SCARA机械手,Motor On情况下,可以在 Control Panel 页面Free All释放所有轴后,手动将机械手移动需要示教点的位置后,Lock ALL锁定所有轴。
2.1 SCARA机械手的手臂姿势图
SYSTEC机械手培训资料

SYSTEC机械手培训资料一、开机时注意事项:1、开机顺序:开注塑机总电源(机械手电源常开——开机械手启动开关——开真空马达(K1键)———开注塑机马达——关注塑机安全门——按注塑机启动键——机械手复位(ACK键)——原点回归(F2键——半自动(Z轴在待机位置)——半自动启动——全自动(用膜纸时inlaying on 灯亮)2、关机程序:关取膜纸键(inlaying off)——半自动——手动——机械手原点回归(F2键)——退炮台——关机械手(红色键)——关注塑机电热、马达——关注塑机总电源3、突然停电处理程序:关掉总电源——用手将Z轴退回原点——等待来电——进入正常开机程序4、不带机械手生产开机械手启动键盘——ACK键——原点回归(F2键)——关真空马达(K1键)——开注塑机5、在处理机械手异常时,应先将机械手复归到原点后才可操作下一步骤:6、Z轴或叠杯装置动作时,注塑机安全门严禁打开,否则机械手启动前,需重新设定7、当机械手设定的生产数量够数时,按F2 键——ACK键——输入1000000——按ESC键则会自动设定的。
二、常用功能中英文对照:Manual functions手动Take out取出Inlaying放置Transfer转换台Staking吸Pra m→密码100→时间设定、手动Timer时间 Counter数量1.时间设定Delay Take out Cylinder Extended 取出气缸前进延迟Delay wiper ring in basic 推圈后退延迟Delay wiper ring extended 推圈前进延迟Delay core air on 钶芯吹气延迟Blow air time core air 钶芯吹气时间Delay blow air wiper ring on 推圈吹气延迟Blow air tine wiper ring 推圈吹气时间Blow air impulse dummy core 管位吹气时间Delay dummy core descended 管位后退延迟Delay dummy core extend inlaying position 管位在放膜纸位置前进延迟Impulse high voltage on 充静电时间Delay conveyor belt off 输送拉动作时间2.手动操作Sucker plate 吸盘 Descend后退 Extend 前进 Servo axis 主轴Vacuum sucker plate on/off 吸盘真空开关Blow air sucker plate on 吸盘吹气开Swivel sucker plate to Magazine/Dummy core 吸盘旋转到膜架/管位Vacuum dummy core off/on管位真空关/开Blow air dummy core on 管位吹气开Dummy core descend/extend 管位后退/前进Dummy core to basic/inlaying position 管位到基本位置/放膜纸位置Basic/mould 基本位置/模具位置Servo axis forward/dropping 主轴前进/放次品Servo axis creep speed Jog-/jog+主轴慢速后退/前进Take out cylinder basic/take out position on 取出气缸原点位置/取出位置三、Z轴的设定(用光盘安装驱动器号:Drive top 16V08)1、驱动步骤PC——drive functions——operation modes——block number2、模式(1)、“0”模式;任何位置回原点模式(2)、“1”模式:1085MM待机位置(3)、“2”模式:Z轴由原点到模具内的运行模式1962.5MM(4)、“3”模式:丢次品位置615MM(5)、“4”模式:从模具回归原点模式3、安装程序时英文解释Target position 目标位置 Velocity 速度Acceleration加速度 Jerk减速Actual position实际位置4、Z轴归零Homing/set absolute measurement motor encoder Z轴归零Execute command执行命令“0”“3”“1”“2”0 (MM) 615 1085 1962.5(参考值)原点丢次品位置待机位置型腔位置2008年11月20日汇编。
机械手培训教材

Precision Excellent Company
WORLD BEST HAPPY BEST
World Leading Technology! The Power of CODA
谢谢大家的倾听!
Precision Excellent Company
WORLD BEST HAPPY BEST
Precision Excellent Company
WORLD BEST HAPPY BEST
2
World Leading Technology! The Power of CODA
Precision Excellent Company
WORLD BEST HAPPY BEST
2
World Leading Technology! The Power of CODA
Precision Excellent Company WORLD BEST HAPPY BEST
2
World Leading Technology! The Power of CODA
1.根据规格要求,使用正 确的袋子,并检查好袋子 的日期码是否正确。 2.将两卡好数的筷子上的 牙签交叉反向入袋,取出 筷子。 3.整里好装好牙签的袋子, 有规则的放在蓝色胶箱中, 流入封口工序
Precision Excellent Company
WORLD BEST HAPPY BEST
2
World Leading Technology! The Power of CODA
1.机械手运行香精上托对产品进 行加香
2.机械手再次前进到位,将加香 的产品放至料仓;然后移到切水 口待机位,等待下一自动循环程 序;
品质检验标准
XYZ机械手培训教材
PART.1 机器外观识别•1.1机械手•1.2教导盒•1.3控制器12345①机头部分②RS-232C插座(教导盒接口)③工作平台④电源开关⑤操作开关⑥电源插座⑦保险丝(5A)⑧I/O接口(控制器接口)6781.1-3机械手操作开关(外观视图)123456①紧急停止开关②程序频道③强制出胶按钮④回归零点开关⑤停止开关⑥开始开关1.1-4机械手操作开关(功能说明)①紧急停止开关/ EMG.STOP 按下该开关机械手强制停止。
紧急停止后红灯亮。
解除紧急停止,将开关按顺时针方向旋转至低。
②程序频道/PROGRAM CH. 选择EXT方式的运用频道(01~99频道)③强制出胶按钮/ SHOT 按下该开关机器将进行强制出胶,该按钮通常用在机器运行前的检查出胶情况。
在机器运行出胶时该灯亮。
④回归零点开关/ ORG.RETURN EXT方式时,机械手回归零点。
回归至零点后开关灯亮。
机械手在回归零点时不可进行其它操作。
⑤停止开关/ STOP EXT方式时,运行程序暂停。
⑥开始开关/ START EXT方式时,运行程序开始。
1.2-1教导盒视图教导盒作用:1.程序的编写、修改、输入、删除都是通过教导盒进行操作2.机器相关参数的设置和修改也是通过教导盒进行操作1.2-2教导盒按钮名称MODE按钮频道按钮坐标转换按钮坐标正负按钮删除按钮数值输入按钮输入确认按钮命令呼出按钮程序编辑按钮参数设置按钮组合功能键按钮回归零点按钮手动XYZ输入按钮手动输入加速按钮开始按钮停止按钮1.3-1控制器视图控制器作用1.控制出胶量的大小2.接受机械手的点胶信号1.3-2控制器功能键说明(正面)①回吸开关1234567②适配器接口③压力设置开关④压力计⑤工作指示灯⑥自动点胶时间⑦模式选择开关1.3-3控制器功能键说明(背面)12345①电源插座②保险丝③数据线接口④排气装置⑤进气接口PART.2 点胶基础知识•2.1 点胶程序•2.2 坐标值概念•2.3 点胶小知识2.1-1程序单项目序号名称说明1频道选择程序的频道2步骤填写程序步骤的编号3指令选择机械手的指令4X.Y.Z.W指定坐标位置(绝对/相对)5数据输入时间、动作速度等辅助数值2.1-2频道的概念⏹通常一个频道是由几个或多个步骤组成⏹一个频道步骤的多少是根据编写程式的需要决定⏹本机可储存999个频道(主频道99个、扩展频道900个)⏹一个频道可容纳2500个步骤⏹一个步骤就是一个指令2.1-3基本点胶程序⏹任何一组程式是由许多基本点胶程序所组成。
FANUC机械手简易培训讲义资料

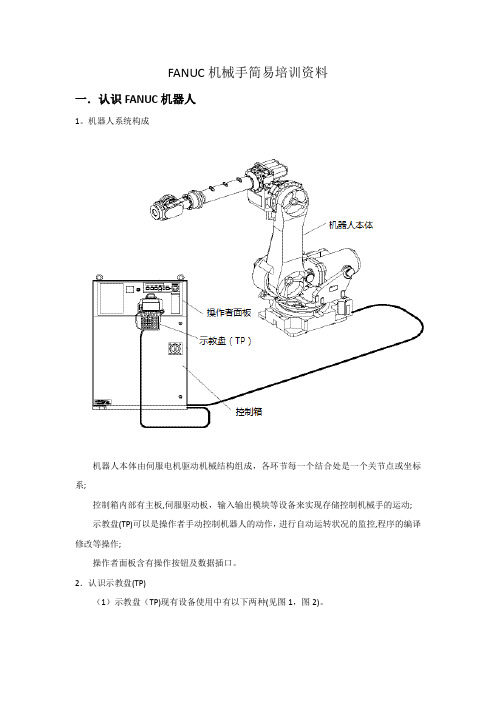
FANUC机械手简易培训资料一.认识FANUC机器人1.机器人系统构成机器人本体由伺服电机驱动机械结构组成,各环节每一个结合处是一个关节点或坐标系;控制箱内部有主板,伺服驱动板,输入输出模块等设备来实现存储控制机械手的运动;示教盘(TP)可以是操作者手动控制机器人的动作,进行自动运转状况的监控,程序的编译修改等操作;操作者面板含有操作按钮及数据插口。
2.认识示教盘(TP)(1)示教盘(TP)现有设备使用中有以下两种(见图1,图2)。
图1Status Inicators(状态指示灯):指示系统状态。
ON/OFF Switch(开关):与DEADMAN开关一起启动或禁止机器人运动。
PREV:显示上一屏幕。
SHIFT:与其它键一起执行特定功能。
MENUS:使用该键显示屏幕菜单。
Cursor :使用这些键移动光标。
STEP:使用这个键在单步执行和循环执行之间切换。
RESET:使用这个键清除告警。
BACK SPACE:使用这个键清楚光标之前的字符或者数字。
ITEM:使用这个键选择它所代表的项。
ENTER:使用该键输入数值或从菜单选择某个项。
POSN:使用该键显示位置数据。
ALARMS:使用该键显示告警屏幕。
SATUS:使用该键显示状态屏幕。
Jog Speed:使用这些键来调节机器人的手动操作速度。
COORD:使用该键来选择手动操作坐标系。
Jog:使用这些键来手动手动操作机器人。
BWD:使用该键从后向前地运行程序。
FWD:使用该键从前至后地运行程序。
HOLD:使用该键停止机器人。
Program keys(程序键):使用这些键选择菜单项。
FCTN:使用该键显示附加菜单。
Emergency Stop Button(紧急停止按钮):使用该键停止正在运行的程序,关闭机器人伺服系统的驱动电源,并对机器人实施制动。
图2(2)TP上的开关①TP开关:此开关控制TP有效/无效,当TP无效时,示教、编程、手动运行不能被使用。
机械手培训资料

在线编程调试
在机械手运行过程中,通过修改 程序参数或重新编译程序进行实
时调试。
机械手的故障排除
硬件故障
检查机械手各部件是否正常工作,如电机、传感 器、电缆等。
软件故障
检查程序逻辑是否正确,参数设置是否合理。
网络故障
检查机械手与控制器之间的通信是否正常,如网 络连接、协议设置等。
04
CATALOGUE
机械手的自动化操作
01
02
03
自动化程序编写
学习如何编写自动化程序 ,以实现机械手的自动化 操作。
自动化操作流程
了解自动化操作的流程和 步骤,包括前期准备、操 作执行和后期处理等。
自动化操作调试
掌握如何调试自动化程序 ,以确保机械手可以正确 地执行自动化操作。
机械手的高级功能
高级编程语言控制
学习使用高级编程语言控 制机械手,以实现更复杂 的操作和功能。
焊接机械手可以24小时不间断地工作,提高生产效率,并且能够保证焊接质量和稳 定性。
焊接机械手可以根据不同的焊接需求进行定制和优化,如弧焊、激光焊等。
05
CATALOGUE
机械手维护与保养
机械手的日常维护
每日检查
01
每天上班前对机械手进行外观检查,包括各部件是否有损伤、
螺丝是否松动等。
润滑保养
02
市场规模持续增长
随着工业机器人技术的不断发展,机械手市场的规模也将 持续增长。
应用领域不断拓展
随着技术的不断发展,机械手技术的应用领域也将不断拓 展。
市场竞争加剧
随着市场规模的不断扩大,机械手市场的竞争也将加剧。
THANKS
感谢观看
机械手应用案例
EPSON机械手培训-课件

编程语言
EPSON机械手支持多种编程语 言,如ST、MOV、PTP等,可
根据实际需求选择。
常用指令
在编程过程中,常用的指令有 SET(设置)、MOV(移动) 、PTP(点对点)、CIRC(圆
弧插补)等。
变量与函数
编程过程中需要使用到变量和 函数来对机械手进行更精确的 控制,如POS(获取位置)、
SPEED(设置速度)等。
04
机械手操作和维护保养
机械手操作规程
01
02
03
机械手操作前检查
在操作机械手前,需对机 械手进行全面检查,包括 电源、气源、机械部分等 。
操作步骤
在操作机械手时,需按照 规定的步骤进行,包括启 动、停止、急停等操作。
安全注意事项
在操作机械手时,需注意 安全,避免操作过程中出 现人员伤害或设备损坏等 情况。
重复定位精度可以达到微米级,能够满足各 种高精度生产线和自动化应用的需求。
产品应用范围
Epson机械手广泛应用于电子、半导体、汽车制造、塑料、食品包装、制药等领 域。
这些机器人可以用于各种高精度生产线、自动化生产线、包装生产线、物料搬运 等场景,提高生产效率、降低劳动强度、提升产品质量。
Epson机械手还可以用于各种危险环境和精密作业,如高温、高压、高污染、放 射性等环境,以及需要高精度定位和稳定控制的作业场景。
机械手的维护和保养
定期保养
定期对机械手进行保养, 包括润滑机械部分、检查 紧固件等。
维护内容
每次保养时,需对机械手 进行检查,包括电源、气 源、机械部分等。
保养周期
保养周期可根据实际情况 确定,一般可设定为1个 月或2个月一次。
05
epson机械手培训课程设计
机械手培训资料

检查机械手是否处于手动状态 ,排除急停按钮、安全防护装 置等故障,检查电源及气源是
否正常。
抓取位置不准
调整机械手的抓取位置,使其准 确可靠;检查传感器是否准确可 靠,必要时进行调整。
机械手振动
检查机械手的各部件螺丝是否松动 ,排除因螺丝松动产生的振动;如 机械手运行时产生共振现象,需对 机械手的结构进行调整。
机械手日常维护与保养项目
清洁机械手表面及轨道
定期清理机械手表面灰尘、油污等杂质,检查轨道是否有异物,确保机械手正常运行。
检查紧固件
经常检查机械手各部位紧固件是否牢固,如有松动应及时紧固。
检查润滑情况
定期检查机械手各润滑点,确保润滑良好,无干磨现象。
机械手定期检查与保养内容
要点一
检查机械手精度
要点二
THANKS
感谢观看
特点
03
04
05
高效性:机械手可以连 续工作,不受时间和空 间的限制,提高生产效 率。
精度高:机械手可以实 现精确的抓取、搬运和 放置,减少误差和损失 。
适应性广:机械手可以 在不同的环境中工作, 适应各种不同的任务需 求。
机械手发展史和现状
发展史
机械手最早出现于20世纪50年代,经历了初期的探索阶段、 成熟阶段和创新阶段。
04
机械手应用和案例分析
机械手应用领域和场景
制造业
医疗行业
机械手在制造业中应用广泛,如汽车制造、 半导体制造、塑料制品制造等,可用于搬运 、装配、焊接、喷涂等作业。
机械手在医疗行业中用于手术、康复训练、 护理等领域,可以提高医疗效率和精度,降 低医疗成本。
农业
服务业
机械手可用于农业中的播种、施肥、收割等 作业,提高生产效率和降低成本。
EPSON机械手导入培训(5)

EPSON机械手导入培训(5)一、教学内容本节课我们将学习EPSON机械手的导入培训内容,主要涉及第五章的内容。
其中包括机械手的基本结构、工作原理、操作方法以及编程控制等方面的知识。
二、教学目标1. 让学生了解并掌握EPSON机械手的基本结构和功能。
2. 培养学生对机械手操作的熟练程度。
3. 使学生能够运用编程控制机械手进行简单的操作任务。
三、教学难点与重点重点:EPSON机械手的基本结构、工作原理和操作方法。
难点:编程控制机械手的操作。
四、教具与学具准备教具:EPSON机械手一台、操作面板一个。
学具:学生操作手册、编程软件。
五、教学过程1. 实践情景引入:介绍EPSON机械手的应用领域,如工业生产、教育科研等,让学生对机械手有初步的认识。
2. 基本结构讲解:讲解EPSON机械手的基本结构,包括手臂、关节、末端执行器等部分,并展示实物图片。
3. 工作原理介绍:介绍机械手的工作原理,如动力传输、控制系统等,并通过动画或视频形式展示机械手的工作过程。
4. 操作方法学习:讲解并演示机械手的操作方法,包括关节控制、末端执行器控制等,让学生进行实操练习。
5. 编程控制讲解:介绍机械手的编程控制方法,包括编程语言、指令集等,并通过实例讲解编程控制的过程。
6. 随堂练习:让学生根据编程指令,控制机械手完成特定的操作任务,检验学生对编程控制的理解和掌握程度。
7. 板书设计:机械手基本结构:1. 手臂2. 关节3. 末端执行器机械手工作原理:1. 动力传输2. 控制系统机械手操作方法:1. 关节控制2. 末端执行器控制机械手编程控制:1. 编程语言2. 指令集3. 编程控制过程8. 作业设计题目1:请简述EPSON机械手的基本结构。
答案:EPSON机械手的基本结构包括手臂、关节、末端执行器等部分。
题目2:请解释EPSON机械手的工作原理。
答案:EPSON机械手的工作原理主要包括动力传输和控制系统两个方面。
题目3:请描述如何操作EPSON机械手。
机械操作手安全培训范本

机械操作手安全培训范本第一章:培训导言1.1 培训目的本培训旨在提高机械操作手对工作安全的认识和意识,掌握基本的安全操作技能,有效预防和避免发生事故并提供急救知识。
1.2 培训对象所有机械操作手以及相关工作人员。
1.3 培训内容概述本次培训涵盖以下内容:- 机械操作风险与危害- 常见机械操作事故案例- 机械设备安全操作规程- 个人防护用品的选择与使用- 应急救援知识与技巧第二章:机械操作风险与危害2.1 机械操作的风险与危害- 机械设备的运动部件可能夹住手指、脚趾或其他身体部位- 物体突然掉落或飞溅导致伤害- 错误操作导致设备故障或事故发生等第三章:常见机械操作事故案例3.1 按照不同类型的机械设备进行案例介绍,如起重机、钢筋加工机械等。
3.2 分析事故的原因和造成的损失,总结教训和应对策略。
第四章:机械设备安全操作规程4.1 确保设备安全的基本操作规程- 使用设备前的检查和保养- 合理使用设备的工作台和工作平台- 操作人员必须熟悉设备上的标志和警告符号- 使用安全开关和防护装置第五章:个人防护用品的选择与使用5.1 选择适合自身工作环境和职业特点的个人防护用品- 头部防护:安全帽- 眼部防护:护目镜、面罩- 呼吸道防护:口罩、防毒面具- 手部防护:手套- 耳部防护:耳塞、耳罩- 脚部防护:防护鞋、防护靴5.2 学习正确使用个人防护用品第六章:应急救援知识与技巧6.1 应急救援的基本原则6.2 学习基本的心肺复苏技巧6.3 学习基本的创伤处理技巧6.4 学习急救装备的使用和保养第七章:学习要点总结7.1 学员针对本次培训进行小结7.2 解答学员提出的问题7.3 发放培训证书和参训笔记参考资料以上是一个机械操作手安全培训的基本范本,本范本为了保证培训的效果,建议模板中的内容能够针对实际情况进行调整和补充。
培训的实施过程中,还要根据实际情况引入相关案例和经验分享,通过实际操作演示和练习以及互动交流等方式来提高培训的可参与性和实效性。
FANUC机械手简易培训资料
FANUC机械手简易培训资料一.认识FANUC机器人1。
机器人系统构成机器人本体由伺服电机驱动机械结构组成,各环节每一个结合处是一个关节点或坐标系;控制箱内部有主板,伺服驱动板,输入输出模块等设备来实现存储控制机械手的运动;示教盘(TP)可以是操作者手动控制机器人的动作,进行自动运转状况的监控,程序的编译修改等操作;操作者面板含有操作按钮及数据插口。
2.认识示教盘(TP)(1)示教盘(TP)现有设备使用中有以下两种(见图1,图2)。
图1Status Inicators(状态指示灯):指示系统状态.ON/OFF Switch(开关) :与DEADMAN开关一起启动或禁止机器人运动。
PREV:显示上一屏幕。
SHIFT:与其它键一起执行特定功能.MENUS:使用该键显示屏幕菜单。
Cursor :使用这些键移动光标。
STEP:使用这个键在单步执行和循环执行之间切换。
RESET:使用这个键清除告警。
BACK SPACE:使用这个键清楚光标之前的字符或者数字。
ITEM:使用这个键选择它所代表的项。
ENTER:使用该键输入数值或从菜单选择某个项。
POSN:使用该键显示位置数据。
ALARMS:使用该键显示告警屏幕。
SATUS:使用该键显示状态屏幕.Jog Speed:使用这些键来调节机器人的手动操作速度.COORD:使用该键来选择手动操作坐标系.Jog:使用这些键来手动手动操作机器人。
BWD:使用该键从后向前地运行程序。
FWD:使用该键从前至后地运行程序。
HOLD:使用该键停止机器人.Program keys(程序键):使用这些键选择菜单项。
FCTN:使用该键显示附加菜单.Emergency Stop Button(紧急停止按钮):使用该键停止正在运行的程序,关闭机器人伺服系统的驱动电源,并对机器人实施制动。
图2 (2)TP上的开关①TP开关:此开关控制TP有效/无效,当TP无效时,示教、编程、手动运行不能被使用。
机械手培训教材

培训人:黄玉 2020年5月28日
目录
一、机械手基本构造 二、科捷机械手基本操作方法 三、天行机械手基本操作方法 四、使用安全注意事项
Z轴(上下)
一、机械手基本构造
翻转 气缸
Y轴(横出)
Y轴(横出)
1、开机画面
注塑机开模完信号, 没有这个信号机械手
不进行动作
二、科捷机械手操作方法
归
12
3
1 2
3
翻直
待 待待机 机机位 位位置 置置
主臂下
主臂前 空动作
主臂后 主臂上
横出
翻平 模外下位
1
2
插入
四.机械手使用及注意事项
一.机械手位置不能确定错误,否则会造成机械损坏 二.编写工艺完成后一定要仔细检查一遍,防止出现工艺编写错误,出现异常。 三. 机械手横出模外下行速度不能过快,以防造成人员损伤。 四.机械手回归原点时,一定要观察回归的方向,看治具是否跟周围其他设备 形成干涉,防止造成治具损坏。 五.机械手后位与模具定模要保持10CM左右距离安全位置。 六.机械手模内取件的时间,要尽量短,这样生产周期会越快,效率越高。
可以调用编好的 工艺
三
二
一
模式设定
二.科捷机械手操作方3.工艺浏览
2.位置设定
密码7777777/3333333
点击
2.位置设定
取物位置
后位与待机 位置一样
2.位置设定
横入位与 横走待机 位置一样
位置设定
保存按钮
点击该按
钮在点红
色start键
及原点复
感谢各位的聆听
Thank You!
机械操作手安全培训模版

机械操作手安全培训模版一、培训目的和背景1. 目的:提高机械操作手的安全意识,掌握必要的安全操作知识和技能,减少机械操作中的事故发生,保障人员生命财产安全。
2. 背景:机械操作手是一个关键岗位,直接涉及到人员的生命安全和设备的正常运行。
为了确保机械操作的安全性,需要对机械操作手进行安全培训。
二、培训内容1. 理论知识培训- 机械操作的危险性和安全意识- 机械操作手的法律法规常识- 机械设备的基本结构和工作原理- 机械设备的常见故障和应急处理方法- 机械设备的维护和保养知识- 机械操作时需要注意的事项2. 安全操作技能培训- 机械设备的正确操作方法和步骤- 机械设备的安全操作要点- 机械操作时的个人防护措施- 机械设备的应急救援措施- 机械设备的日常维护和保养技巧三、培训方法1. 理论知识培训- 理论讲解:通过讲解机械操作的危险性、法律法规等知识,提高操作手的安全意识。
- 技术交流:邀请具有丰富经验的机械操作手进行技术交流和经验分享。
- 案例分析:通过真实案例的分析,让操作手了解机械操作过程中可能发生的事故和事故原因,以及避免类似事故的方法。
2. 安全操作技能培训- 示范操作:由专业人员进行机械设备的示范操作,让操作手掌握正确的操作方法和步骤。
- 实操训练:进行机械设备的实际操作训练,通过模拟真实环境,提高操作手的操作技能。
- 模拟演练:利用模拟场景进行安全应急演练,让操作手学会应对紧急情况和救援措施。
四、培训考核和评估1. 考核方式- 理论考试:考核机械操作手对理论知识的掌握程度,通过单选、多选、问答等形式进行考核。
- 操作考试:考核机械操作手对机械设备的实际操作技能和安全操作要点的掌握情况,通过实际操作进行考核。
2. 评估方式- 反馈意见:在培训结束后,收集机械操作手对培训的反馈意见和建议。
- 现场观察:观察机械操作手在实际工作中是否能够正确运用培训所学的知识和技能。
五、培训资料和工具1. 培训资料- 法规标准:包括机械设备安全生产法律法规的相关文件和标准规范。
机械手设备培训
8、采用人工分组润滑的方式。克莱斯曼 认为只有人工润滑才能保证设备的充分 润滑。人工润滑只是需要每周在机械手 的所有润滑点上油脂润滑一次,即可保 证设备的充分润滑。采用分组润滑系统, 是将连接润滑点的润滑管道分组集中到 设备的4个特殊区并组合到一起(夹具除 外),维护人员只需到这4个特殊区处进 行人工润滑即可,而不需要担心漏掉任 何一个润滑点。
谢谢大家!
2、腕关节 3轴腕关节。 液压缸驱动俯仰轴,重载球面双辊 子轴承。 液压马达驱动偏摆及旋转轴,重载 球面双辊子轴承。 夹具安装板上带减振器。 旋转轴上的用以提供液压油至夹具 的旋转关节处的液压密封易更换。
3、夹具 由液压油缸及联动装置驱动。 油缸和抓取装置的所有轴承采用 重载球面辊子轴承。 减压阀控制调节夹具的夹紧力。
4、操作室 带视窗的钢制结构,180度视角。 操作室顶部安装的空调系统, 带独立4KW电动马达, 压缩机及含过滤装置的减震器。控制在操作室内。 操作椅3轴活动,可以调节向前和向后,高度和椅背 的斜度。 由隔音材料制造,配备双层玻璃可以减少17DB的噪 音。 操作面板,包括油泵停止/启动,急停,安全起动控 制,警示灯。 顶部装有带开关的日光灯。操作椅靠手具有单轴模 拟控制臂。 电子控制面板。
机械手配置 1、主机 拣件能力500公斤 三轴伺服电机驱动,平行四边形联动机构保持抓取装置在整 个工作范围内的相对位置。 所有轴承均为重载球面大直径双滚柱轴承。 整机能够旋转300度。 具有机械缓冲器,防止转动超过极限转角。 采用电气回转限位系统减速及紧急制动。 具有水平连杆减振器。 垂直及水平运动由液压油缸驱动,带缓冲装置和电气减速限 位系统。 水平及垂直油缸装有球面双辊子轴承。 回转运动由液压马达通过小齿轮驱动咬合的大直径回转轴承 实现。 限制液压力,减少破坏载荷。 加速度控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械手(Robot)
培训资料
广东凯宝机器人科技有限公司
技术部胡光民
二零一二年三月
目录
一、机械手市场分析
二、现阶段机械手的特点
三、机械手产品相关知识解答
四、机械手的发展趋势
一、机械手市场分析
品牌产地品质价格优、劣势市场YAMAHA日本★★★★★★★★★★质优价高全方位市场IAI日本★★★★★★★★★★质优价高小型机械手为主ROBOSTAR韩国★★★★★★★★质优价高机械手,机器人DONGBU韩国★★★★★★★★质优价高机械手,机器人ALPHA韩国★★★★★★★★质优价高机械手,机器人TOYO中国-台湾★★★★★★质量还好,价格便宜机械手润达中国-台湾★★★★★差机械手腾盛深圳★★★★★★一般机械手、设备富士深圳★★★★差机械手东莞★★★★★★一般机械手
二、现阶段机械手的特点
机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动、不知疲劳、不怕危险、抓举重物的力量比人手大等特点,因此,机械手已受到许多部门的重视,并
越来越广泛地得到了应用。
•工业机械手也是工业机器人的一个重要分支。
•工业机械手的特点是可以通过编程来完成各种预期的作业,在构造和性能上兼有人和机器各自的优点,尤其体现在人的智能和适应性。
•机械手作业的准确性和环境中完成作业的能力,在国民经济领域有着广泛的发展空间。
•机械手的发展是由于它的积极作用正日益为人们所认识:
其一、它能部分的代替人工操作;
其二、它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和
装卸;
其三、它能操作必要的机具进行焊接和装配,从而大大的改善了工人的劳动条件,显
著的提高了劳动生产率,加快实现工业生产机械化和自动化的步伐。
因而,受到很多国家的重视,投入大量的人力物力来研究和应用。
尤其是在高温、高
压、粉尘、噪音以及带有放射性和污染的场合,应用的更为广泛。
在我国近几年也有
较快的发展,并且取得一定的效果,受到机械工业的重视。
三、机械手产品相关知识解答
机械手类型
丝杆型机械手
开放式机械手
同步带型机械手
机械手
丝杆型机械手
洁净式机械手
同步带型机械手
开放式机械手
洁净式机械手
1、开放式机械手适用于:一般环境
下设备使用。
2、洁净式机械手适用于:恶劣环境
使用。
喷涂设备、电焊设备、木工切割设备、高污染,高粉尘等恶劣环境。
3、丝杆型机械手适用于:重复精度
要求高(+/-0.02)、负载重的设备。
4、同步带型机械手适用于:重复精
度要求不高(+/-0.05)、负载轻的设备。
❖机械手类型
丝杆型同步带型
机械手选型
⌧公司现有产品型号目录
开放式洁净式80116130C50C66C80 160180200C105C125C150 250C185C230
⍓选型常见的几个问题
1、对方需求产品类型?A:开放型B、洁净型C、丝杆型D、同步带型
2、对方需求产品行程?A:200mm B:500mm客户自定义
3、对方对丝杆精度要求?A:C3B:C5C:C7
4、对方对丝杆导程要求?A:05B:10C:20D、40
5、对方需求产品负载要求?A:5kg B:10kg客户自定义
6、对方需求产品需求几轴?A:单轴B:两轴C:三轴D、四轴
四、机械手的发展趋势
• 1 重复高精度
精度是指机械手达到指定点的精确程度,它与驱动器的分辨率以及反馈装置有关。
重复精度是指如果动作重复次数多,机械手到达同样位置的精确程度。
重复精度比精度更重要,如果一个机械手定位不够精确,通常会显示一个固定的误差,这个误差是可以预测的,因此可以通过编程予以校正。
重复精度限定的是一个随机误差的范围,它通过一定次数地重复运行机械手来测定。
随着微电子技术和现代控制技术的发展,机械手的重复精度将越来越高,它的应用领域也将更广阔,如核工业和军事工业等。
• 2 模块化
有的公司把带有系列导向驱动装置的机械手称为简单的传输技术,而把模块化拼装的机械手称为现代传输技术。
模块化拼装的机械手比组合导向驱动装置更具灵活的安装体系。
它集成电接口和带电缆及油管的导向系统装置,使机械手动作自如。
模块化机械手使同一机械手可能应用不同的模块而具有不同的功能,扩大了机械手的应用范围,是机械手的一个重要的发展方向。
• 3 节能化
为了适应食品、医药、生物工程、电子、纺织、精密仪器等行业的无污染要求不加润滑脂的不供油润滑元件已经问世。
随着材料技术的进步,新型材料的出现,构造特殊、用自润滑材料制造的无润滑元件,不仅节省润滑油、不污染环境,而且系统简单、摩擦性能稳定、成本低、寿命长。
• 4 机电一体化
由“可编程控制器—传感器—液压元件”组成的典型的控制系统仍然是自动化技术的重要方面;发展与电子技术相结合的自适应控制液压元件,使液压技术从“开关控制”进入到高精度的“反馈控制”;节省配线的复合集成系统,不仅减少配线、配管和元件,而且拆装简单,大大提高了系统的可靠性。
而今,电磁阀的线圈功率越来越小,而PLC的输出功率在增大,由PLC直接控制线圈变得越来越可能。
国外机械手的发展趋势是大力研制具有某种智能的机械手。
使它具有一定的传感能力,能反馈外界条件的变化,作相应的变更。
如位置发生稍许偏差时,即能更正并自行检测,重点是研究视觉功能和触觉功能。
目前已经取得一定成绩。
视觉功能即在机械手上安装有电视照相机和光学测距仪以及微型计算机。
工作是电视照相机将物体形象变成视频信号,然后送给计算机,以便分析物体的种类、大小、颜色和位置,并发出指令控制机械手进行工作。
触觉功能即是在机械手上安装有触觉反馈控制装置。
工作时机械手首先伸出手指寻找工作,通过安装在手指内的压力敏感元件产生触觉作用,然后伸向前方,抓住工件。
手的抓力大小通过装在手指内的敏感元件来控制,达到自动调整握力的大小。
总之,随着传感技术的发展机械手装配作业的能力也将进一步提高。
更重要的是将机械手、柔性制造系统和柔性制造单元相结合,从而根本改变目前机械制造系统的人工操作状态。
随着科学与技术的发展,机械手的应用领域也不断扩大。
目前,机械手不仅应用于传统制造业,如采矿、冶金、石油、化学、船舶等领域,同时也已开始扩大到核能、航空、航天、医药、生化等高科技领域以及家庭清洁、医疗康复等服务业领域中。