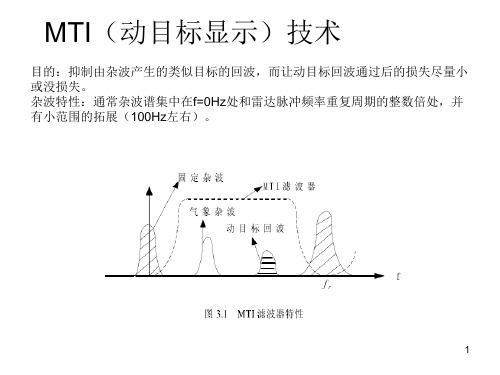
经典雷达动目标显示MTI雷达
经典雷达资料-第16章 机载动目标显示(AMTI)雷达-1
第16章机载动目标显示(AMTI)雷达FRED M. STAUDAHER16.1 采用AMTI技术的系统机载搜索雷达最初是为远程侦察机探测舰艇研制的。
第二次世界大战后期,美海军研制了几种机载预警(AEW)雷达,用来探测从舰艇雷达天线威力区之下飞近特遣舰队的低空飞机。
在增大对空和对海面目标的最大检测距离方面,机载雷达的优点是显而易见的,只要了解下述情况就很清楚了,高度为100ft的天线桅杆,其雷达视线距离只有12n mile,而与其相比,飞机高度为10 000ft时,雷达视线距离则为123n mile。
神风突击队袭击造成多艘哨舰的损失引起了机载自主探测与控制站的设想,后来这种系统发展成为一种用于洲际防空的边界巡逻机。
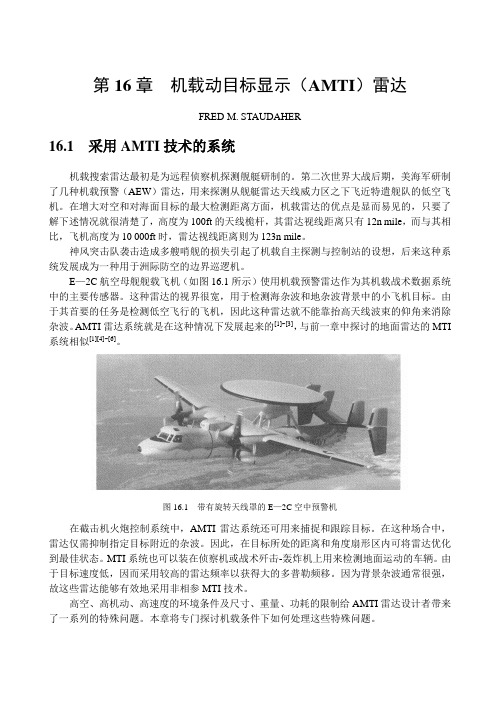
E—2C航空母舰舰载飞机(如图16.1所示)使用机载预警雷达作为其机载战术数据系统中的主要传感器。
这种雷达的视界很宽,用于检测海杂波和地杂波背景中的小飞机目标。
由于其首要的任务是检测低空飞行的飞机,因此这种雷达就不能靠抬高天线波束的仰角来消除杂波。
AMTI雷达系统就是在这种情况下发展起来的[1]~[3],与前一章中探讨的地面雷达的MTI 系统相似[1][4]~[6]。
图16.1 带有旋转天线罩的E—2C空中预警机在截击机火炮控制系统中,AMTI雷达系统还可用来捕捉和跟踪目标。
在这种场合中,雷达仅需抑制指定目标附近的杂波。
因此,在目标所处的距离和角度扇形区内可将雷达优化到最佳状态。
MTI系统也可以装在侦察机或战术歼击-轰炸机上用来检测地面运动的车辆。
由于目标速度低,因而采用较高的雷达频率以获得大的多普勒频移。
因为背景杂波通常很强,故这些雷达能够有效地采用非相参MTI技术。
高空、高机动、高速度的环境条件及尺寸、重量、功耗的限制给AMTI雷达设计者带来了一系列的特殊问题。
本章将专门探讨机载条件下如何处理这些特殊问题。
第16章机载动目标显示(AMTI)雷达·637·16.2 覆盖范围的考虑搜索雷达一般要求有360︒方位角覆盖。
MTI动目标显示雷达

样,取样后的波形和频谱均将发生变化。
动目标显示雷达的工作原理及主要组成
当用多普勒效应来鉴别运动目标回波和固定目标回波时, 与普通脉冲雷 达的差别是必须在相位检波器的输入端加上基准电压(或称相参电压) ,该 电压应和发射信号频率相参并保存发射信号的初相, 且在整个接收信号期间 连续存在。 工程上,基准电压的频率常选在中频(相位检波器的相位基准) 。各种 回波信号均与基准电压比较相位。从相位检波器输出的视频脉冲,有固定目 标的等幅脉冲串和运动目标的调幅脉冲串。通常在送到终端(显示器或数据 处理系统)去之前要将固定杂波消去,故要采用相消设备或杂波滤波器,滤 去杂波干扰而保存运动目标信息。 下面着重讨论相参电压的获取和固定杂波 消除这两个特殊问题。
脉冲工作状态时的多普勒效应 盲速和频闪
盲速:是指目标虽然有一定的径向速度������������ ,但若其回波信号经过相位检 波器后,输出为一串等幅脉冲,与固定目标的回波相同,此时的运动速度称 为盲速。 (������������ 等于脉冲重复频率������������ 的整数倍) 频闪: 频闪效应是指当脉冲工作状态时,相位检波器输出端回波脉冲信 号的包络调制频率������������ ,与目标运动的径向速度������������ 不再保持正比关系。此时如 用包络调制频率测速时将产生测速模糊。 (即������������ 超过重复频率������������ 的一半) 产生盲速和频闪效应的基本原因在于, 脉冲工作状态是对连续发射的取
2.消除固定目标回波
在相位检波器输出端, 固定目标的回波是一串振幅不变的脉冲,而运动 目标的回波是一串振幅调制的脉冲。将它们加到偏转调制显示器上,固定目 标的回波是振幅稳定的脉冲,而运动目标的回波呈现上下“跳动”的“蝴蝶 效应” 。 可以根据这种波形特点, 在偏转显示器上区分固定目标与运动目标。 如果要把回波信号加到亮度调制显示器或终端数据处理设备, 则必须先消除 固定目标回波。 最直观的一种办法是将相邻重复周期的信号相减,使固定目 标回波由于振幅不变而相互抵消; 运动目标回波相减后剩下相邻重复周期振 幅变化的部分输出。 A. 相消设备特性 相消设备等效于一个梳齿形滤波器,其频率特性在������ = ������������ ������ 各点均为零。 固定目标频谱的特点是,谱线位于������������������ 点上,因而在理想情况下,通过相消 器这样的梳齿滤波器后输出为零。 但当目标的多普勒频率为重复频率整数倍 时,其频谱结构也有相同的特点,故通过上述梳状滤波器后无输出。 B. 数字相消器 相消器需要迟延线将信号迟延一个脉冲重复周期并和未迟延的信号相 减。 现代大规模的集成电路的迅猛发展,可完全用数字技术来实现信号的存 储、延时和各种实时运算。 首先把从相位检波器输出的模拟信号变为数字信号。 以时钟脉冲控制取 样保持电路对输入相参视频信号取样, 被时间量化的取样保持信号送到模数 转换电路(A/D 变换器)进行幅度分层,转为数字信号输出。数字信号的延 迟可用存储器完成, 将数字信号按取样顺序写入存储器内,当下一个重复周 期的数字信号到来时, 由存储器中都会出同一距离单元的信号进行相减运算, 在输出端得到跨周期相消的数字信号。 一般取样间隔应小于脉冲宽度的一半, 即在一个脉冲宽度以内取样两次 以上。A/D 变换器的量化位数 N 应选到 N≥7 后,量化损失低于 0.08dB,可 以忽略其影响。N 的选择还对系统改善因子有影响。
几种典型动目标指示雷达系统的参数特性介绍(一)
几种典型动目标指示雷达系统的参数特性介绍(一)作者:覃金海来源:《大东方》2018年第04期摘要:本文基于文献检索,主要对目前的典型MTI系统进行了介绍,分别对AN/PPS系列地面监视雷达、F-SAR系统、JSTARS系统、TanDEM-X的ATI功能进行了研究与总结,介绍了它们的主要原理以及参数特性。
一、AN/PPS系列地面监视雷达是AN/PPS-5是AN/PPS系列地面监视雷达于1950年代推出的第一个型号,它是一种地对地的轻型便携式多普勒脉冲雷达,在越南战争中表现突出,列装于步兵和坦克部队,可以对6km距离的人员或者10km距离的车辆目标进行全天候的探测和运动目标检测。
AN/PPS-5具有视觉成像以及有声成像功能,“计划位置指示器(PPI)”可以进行视觉成像;“有声指示器”则是能够将目标的速度记录下来,然后把速度的数值进行声音应答。
AN/PPS-5还具有两种工作模式,分别是手动扫描模式和自动扇形区域扫描。
并且由于其用于搭载地基平台,雷达系统的密封性能非常好,并且设计十分坚固,能够很好的适应恶劣的地形条件,还可以在集装箱的保护下浸入水中甚至是进行伞降。
该雷达可以安装在悍马车和吉普车等车载平台上使用,也能作为单兵装备直接是携带使用。
在AN/PPS系列中除了AN/PPS-5雷达,较为有名的还有AN/PPS-4、AN/PPS-6以及AN/PPS-15地面监视雷达。
AN/PPS-4的体积较小,高只有约1.2m,AN/PPS-4和AN/PPS-6的探测范围都比AN/PPS-5小,但其他功能比较接近。
AN/PPS-15则是目前已经公布的AN/PPS系列的最后一款地面监视雷达,该雷达制作了A、B两型,自1974年生产、1976年服役后沿用至今,其能够对战场上的车辆、船只以及人员等移动目标进行近距离的探测和定位。
AN/PPS—15可以全天候运转,并且能够适应多种气象和地形条件,能够为步兵侦察任务提供很好的装备、技术保障。
经典雷达资料-第15章 动目标显示(MTI)雷达-1

第15章动目标显示(MTI)雷达Willian W.ShraderV.Gregers-Hansen15.1 引言MTI雷达的用途是抑制来自建筑物、山、树、海和雨之类的固定或慢动的无用目标信号,并且能检测或显示飞机之类的运动目标信号。
图15.1是两张平面位置显示器(PPI)的照片,表明了一部正常工作的MTI雷达的效果。
从中心亮点到平面位置显示器的最边缘为40n mile,距离刻度环间距为10 n mile。
其中,左图是正常的视频显示,显示了固定的目标回波;右图是MTI雷达抑制杂波的照片,在天线扫描3次的时间内,照相机快门始终是打开的,因此飞机目标呈现连续的3个回波。
图15.1 MTI系统的效果这两张照片显示了MTI系统的效果。
在天线连续转3圈时,由于照相机的快门一直是打开的,所以在右面的照片上,飞机看起来就是相邻的3个亮点。
PPI的量程是40 n mile。
MTI雷达利用动目标回波的多普勒频移来区分动目标和固定目标。
在脉冲雷达系统中,这一多普勒频移表现为相继返回的雷达脉冲间回波信号的相位变化。
假设雷达所辐射的射频脉冲能量被一幢楼房和飞向雷达站的一架飞机所反射。
反射回波需经一定的时间方能返回雷达。
雷达又发射第二个射频脉冲,楼房反射的回波信号仍将经历完全相同的时间后返回。
但雷达手册²576²是从飞机反射回的信号所经历的时间却稍微少一些,这是因为在两个发射脉冲之间,飞机已向雷达的方向靠近了一段距离。
回波信号返回雷达所需的准确时间并不重要,但脉冲间时间是否变化却很重要。
时间的变化(对飞机目标而言,数量级为几个毫微秒)可以用回波信号的相位与雷达基准振荡器相位之间加以比较来确定。
如目标在脉冲间发生移动,则回波脉冲的相位就会发生变化。
图15.2是一种相参MTI雷达的简化框图。
射频振荡器向发射脉冲的脉冲放大器馈送能量。
同时,射频振荡器还用做确定回波信号相位的相位基准。
在发射脉冲的间隔时间内,相位信息储存在脉冲重复间隔(PRI)存储器中,并且还与前一个发射脉冲的相位信息相减。
经典雷达资料-第15章 动目标显示(MTI)雷达-5

经过修正的相位噪声谱密度如图15.48所示。
相对于载波,总噪声功率可由曲线下面的噪声功率积分来决定。
每段功率谱密度随频率变化的方程为图15.46 微波振荡器的单边带相位噪声谱密度和有效噪声密度图15.47 基于系统参数对微波振荡器相位噪声的修正(系统参数见书中内容)雷 达 手 册·576·图15.48 组合修正和修正后的相位噪声谱密度⎥⎥⎦⎤⎢⎢⎣⎡⨯=)lg(101110)(f f f p f p 斜率 (15.28)式中,P f 1为在f 1的功率谱密度,单位是W/Hz (为方便起见,载波功率假设为1W );“斜率”为该段的斜率,单位是dB/10倍频程;f 1为P f 1处的频率。
对于具有恒定斜率的的每段频谱而言,该方程可以用Vigneri 方法[31]或用带积分功能的计算器(如Hewlett Packard HP-15C )求积分运算。
表15.3给出这个例子的积分结果。
注意:假设条件是载波功率为1W ,如-149.4dBc/Hz 变成1.148×10-15W/Hz ,则在所有段计算积分功率时,先对它们求和,然后转化为dBc 。
最终结果-66.37dBc 就是由振荡器噪声导致的对改善因子I 的限制。
对I SCR (dB )的极限是I (dB )加上目标积累增益(dB )。
表15.3 用图15.47进行校正的如图15.46所示的相位噪声谱密度积分值发射脉冲的时间抖动会使MTI 系统的性能变坏。
时间抖动会使脉冲的前沿及后沿对消失败,而每一个未被对消的部分的幅度为∆t /τ。
这里,∆t 为抖动时间;τ为发射脉冲宽度。
总的剩余功率为2(∆t /τ)2,因此,由于时间抖动对改善因子所产生的限制为)]2/(lg[20t I ∆=τ(dB)。
第15章 动目标显示(MTI )雷达·577·对改善因子的这种限制是根据非编码发射脉冲并假定接收机带宽与发射脉冲持续时间相匹配得出的。
美军雷达命名程序和雷达英文词汇

美军雷达命名规范按老美军用标准MIL-STD-196D规定,其军用电子设备(包括雷达)根据联合电子类型命名系统(JETDS。
名称由字母AN (陆军-海军联合命名系统),一条斜线和另外三个字母组成。
三个字母表示设备安装位置,设备类型和设备用途。
比如AN/SPS-49表示舰载警戒雷达。
数字49标识特定装备,并且表示该设备时JETDS规定的SPS类的第49种。
经过一次修改就在原型后附加一个字母如ABC名称后加破折号,T和数字表示丫是用来训练的。
名称后的括号内V表示丫是可变系统,就是通过增加或减少设备来完成不同功能的系统。
处于试验和研制中的系统有时在紧随正式名称后的括弧内用特殊标志来表示,他们用来指明研究单位。
比如XB表示海军研究实验室,XW表示罗姆航空发展中心。
下面就把AN/***后面的三个字母的意思祥加说明。
JETDS设备符号安装位置(第一个字母)A机载T地面可运输式设备B水下移动式,潜艇U通用C载波设备D无人驾驶运载工具V地面车载D放射性检测,指示,F地面固定W水面或水下计算设备G地面通用Z有人和无人驾驶空E激光设备K水陆两用中运输工具G电报,电传设备M地面移动式设备类型(第一个字I内部通信和有线广P便携式母)播S水面舰艇A不可见光,热辐射J机电设备K遥测设备Y数据处理设备罗盘,测深,进场)L电子对抗设备设备用途(第三个字Q专用或兼用M气象设备母)R接收,无源探测N空中声测设备A辅助装置S探测或测距,测向, P雷达B轰炸搜索Q声纳和水声设备C通信(发射和接受)T发射R无线电设备D测向侦查或警戒W自动飞行或遥控S专用设备,磁设备E弹射或投掷X识别或组合设备G火控或探照灯瞄准Y监视和火控T电话(有线)设备H记录V目视和可见光设备K计算W武器特有设备M维修或测试工具X传真和电视设备N导航(测高,信标,有源滤波器Activefilter Airborne-i nterceptradar有源校正网络机载警戒雷达Activecorrective network Airbornewarni ngradar有源干扰Activejamming 模拟信号Analogsignal机载引导雷达天线抗干扰技术Airbor nedirectorradarAntennaan ti-jammi ngtech nique机载动目标显示AirborneMTI 天线增益Antennagain机载雷达Airborneradar 反辐射导弹机载截击雷达An ti-radiatio nmissile背射天线Backfireantenna回差Backlash 轰炸雷达Bomb in gradar平衡电感Balancinginductor选频放大器Bandpassamplifier 战场侦察雷达Battle-fieldsearchradar 盲区Bli ndzone闪烁干扰Blinkingjamming击穿功率Breakdownpower体效应二极管本地振荡器Bulkeffectdiodelocaloscillator宽带中频放大器Broadba ndin termediatefreque n cyamplifier机柜、分机结构Cabin et,subassembly标定误差Calibratederror电子束管(阴极射线管)Cathode-raytube(CRT)空腔型振荡器CavityOscillator谐振腔CavityResonator 空腔稳频本地振荡器Cavity-StabilizedLocalOscillator干扰偶极子ChaffDipole信道化接收机Cha nn elizedreceiver圆极化平面波Circularlypolarizedpla newave闭环控制系统(反馈控制系统) Close-loopco ntrolsystem(feed-backc on trolsystem)杂波抑制Cluttersuppression同轴电缆Coaxialcable 同轴谐振腔Coaxialcavity同轴定向耦合器Coaxialdirecti on alcoupler 同轴滤波器Coaxialfilter相干振荡器Coherentoscillator 相干动目标显示CoherentMTI复调制干扰Complexmodulatedjammi ng圆锥扫描雷达Coni calsca nradar圆锥扫描天线Coni calSca nn edA ntenna连续波雷达接收机Con ti nu ous-waveradarreceiver 对比度Contrast 卷积器Convo lutor变频损耗Conversionloss 相关时间Correlati on time抗反辐射导弹措施Coun tera nti-radiatio nm issile measures 正交场器件(M型器件)Crossed-fielddevices(M-typed evices)截止式衰减器Cut-OffAttenutor 截止波长Cut-offwavele ngth连续波雷达发射机CWRadarTra nsmitter直流阻抗 D.C.impedanee直流谐振充电D.C.res onan tcharg ing 直流谐振二极管充电D.C.res onan tdiodecharge 数据处理Dataprocessing 偏转线圈Deflectioncoil 延时充电电路Delayedcharg in gcircuit介质移相器Dielectricphaseshifter介质干扰杆Dielectricchaffrod数字滤波器Digitalfilter数字匹配滤波器Digitalmatchedfilter数字测距Digitalranging 引导雷达Directorradar 多普勒雷达DopplerRadar 双门限检测器Doublethresholddetector 双T接头DoubleT-junction等效负载Dummyloac天线收发开关DuplexerE面 (H面)折叠双TEpla ne(Hpla ne)magic-T天线的有效面积Effectiveareaofa nantenna电液伺服阀Electro-hydraulicServovalue电磁兼容性Electromag neticcompatibility电子抗干扰Electro nica nti-jammi ng 电扫描天线Electro nicSca nn eda ntenna电扫描雷达Electro nicallySca nn edRadar 椭圆极化场矢量EllipticallyPolarizedFieldVector末制导雷达End-guidanceradar 激励器(预调器、触发器) Exciter(premodulator,trigger)极窄脉冲雷达Extra-shortpulseradar快速付里叶变换FastFourierTra nsform馈电网络Feed network相控阵馈电网络Feed networksForPhasedArray 铁氧体移相器Ferritephaseshifter火控雷达Firecontrolradar 频率捷变雷达Freque ncyagileradar调频雷达发射机Freque ncymodulati on radartra n smitter引信干扰Fusejamming齿轮传动误差Geartra nsmissi on error图形失真校正Graphicdistortio ncorrectio n格雷戈伦天线Isolati on betwee nantennasGregara inantenna制导雷达Guidanceradar炮瞄雷达Gun direct in gradar 回旋管Gyrotron测高雷达Height-findingradar水平极化场矢量Horiz on tallypolarizedfieldve ctor喇叭天线Hornantenna环行电桥Hybridri ng液压泵Hydraulicpump阻抗匹配Impedancematch天线阻抗匹配Impeda ncematchofa ntenna输入阻抗Inputimpedanee 天线罩插入相移In sertio nphaseofaradome阵列单元的孤立阻抗Isolatedimpeda nceofa narrayel eme nt天线间的隔离干扰压制系数Jammi ngbla nketfactor干扰调制样式Jam min gmodulati on type干扰信号带宽Jam min gsig nalba ndwidth速调管Klystron激光雷达Laserradar线阵天线Lineararrayantenna 负载阻抗Loadimpeda nee低空搜索雷达Lowaltitudesurveilla nceradar磁脉冲调制器Magneticpulsemodulator 磁控管Magnetron磁控管灯丝电压控制电路Mag netro nfilame ntvoltagec ont rolli ngCircuit主瓣零点宽度Main(m ajor)lobezerobeamwidth 航海雷达Marin eradar矩阵阵列Matrixarray 气象雷达Meteorologicalradar微波带通滤波器Microwaveba nd-passfilter微波场效应晶体管放大器Microwavefieldeffecttra nsist oramplifier微波全息雷达Microwavehologramradar微波低通滤波器Microwavelow-passfilter副瓣电平Mino r(side)lobelevel机动雷达Movableradar阵列天线的互耦Mutualcoupli ngofa narraya nten na多模馈电器Multimodefeed多基地雷达Multistaticradar多端网络Multiport network导航雷达Navigationradar 噪声调幅干扰NoiseAMjamming噪声调幅调相干扰NoiseAM-PMjammi ng归一化差斜率Normalizeddiffere nceslope单通道单脉冲雷达On e-cha nn elM ono pulseRadar 开环系统频率特性Open-loopsystemfreque ncychar acteristic运算放大器Operati on alAmplifier超视距雷达Over-the-horizon radar过压保护电路Overvoltageprotectio ncircuit抛物柱面天线Paraboliccyli ndricala nte nna参量检测器Parameterdetector无源雷达Passiveradar相位检波器Phasedetector移相器Phasedetector相控阵天线Phasedarrayantenna 锁相接收r机Phase-lockedreceiver 合成孔径雷达Syntheticradar相位扫描雷达目标识别雷达Phase-sca nn edradar Target-identification radar脉冲压缩雷达三通道单脉冲雷达接收机Pulsecompressi on radar 脉冲雷Three-cha nn elm ono pulseradarr 达接收机Pulseradarreceiver eceiver相控阵的量化误差T型(Y型)环行器(结环行器)Quan tizati onT-type( Y-type)circulator(j un errorofaphasedarray ction circulator)雷达精度Radaraccuracy雷达反静电控制超咼频电子管(栅控管)侦察UHFelectro nstaticco ntroltube Radara nti-rec onn aissa nee V形波束雷达V-beamradar天线罩Radome 压控晶体振荡器米样频率Samplingfrequency 舰Voltagec on trolledoscillator载雷达Shipbasedradar 波导谐振腔Waveguidecavity船用雷达Shipboardradar 侧视天气雷达WeatherradarX-Y型天雷达Side-look in gradar 线座X-Ytypeantennapedestal旁瓣对消八木天线Yagiantenna SidelobeCa ncellatio n 雷达覆盖范围固体微波振荡器Zon eofradarcoverage Solidstatemicrowaveoscillato 零轴漂移Zero-axsisdrift雷达工作模式:目标捕获系统:Thete ntio nactio nsystem(该系统配备有嵌入式惯性导航系统和全球定位系统,可在雷达快速展开时提供雷达位置坐标。
MTI雷达知识

MTI雷达知识MTI 雷达的目的是抑制来自建筑、山、树、海和雨等固定或慢动的无用目标信号,并保留对如飞机等运动目标信号的检测或显示。
MTI 雷达利用动目标带给回波的多普勒频移来区分动目标和固定目标。
在脉冲雷达系统中,这种多普勒频移表现为相继返回的雷达脉冲间回波信号的相位变化。
假设雷达所辐射的射频脉冲能量被一幢楼房(固定目标)和飞向雷达的一架飞机(动目标)所反射。
反射回波脉冲需经一定的时间方能返回雷达。
雷达再次发射第二个射频脉冲,楼房反射的回波信号仍将经历完全相同的时间后返回。
但是从运动的飞机反射回的信号返回所经历的时间却稍微少一些,因为在两个发射脉冲之间,飞机已向雷达的方向靠近了一段距离。
时间的变化(对飞机目标而言,数量级为几毫微秒)可以用回波信号的相位与雷达基准振荡器相位之间的比较来确定。
如果目标在脉冲间发生移动,则回波脉冲的相位就会发生变化。
如下图所示。
图源自网络下图是一种相干MTI 雷达的简化框图。
射频振荡器向发射脉冲的脉冲放大器馈送信号。
同时,射频振荡器还用作确定回波信号相位的相位基准。
在发射脉冲的间隔时间内,相位信息存储在脉冲重复间隔(PRI)存储器中,并且和当前一个接收脉冲的相位信息相减。
只有当回波信号为动目标回波时,减法器才有输出。
下图是一幅完整的 MTI 雷达方框图。
当该雷达工作在 L 或 S 波段,典型脉冲间隔为1~3ms,采用真空管放大器,如速调管时脉宽为几微秒;当使用固态发射机时,为进行脉冲压缩,脉宽为几十微秒。
接收信号由低噪声放大器(LNA)放大,然后通过与稳定本振混频经一个或多个中频(IF)下变频。
接收机输出端接中频带通限幅器保护后面的 A/D 转换器,并防止 A/D饱和。
在早期 MTI 系统中,中频限幅器起到限制动态范围以降低MTI输出杂波残留的目的。
接收信号然后通过A/D 转换器转换成同相和正交分量(I 和 Q),方法是使用一对相位检测器或直接采样。
同相分量(I)和正交分量(Q)输出是中频信号幅度和相位的函数,过去称为双极性视频,但更确切的说法是接收信号的复包络。
雷达系统导论4讲解

雷达系统导论4四、动目标显示MTI(Moving Target Indicator)、脉冲多普勒雷达PD(Pulsed Doppler)按照《电气与电子工程师协会(IEEE)标准雷达定义》,多普勒雷达是一种利用多普勒效应来确定雷达—目标相对速度径向分量或选择具有径向速度目标的雷达[31]。
脉冲多普勒雷达:采用脉冲方式发射的多普勒雷达。
动目标显示:为增强检测并显示运动目标的一种技术。
共同特点:利用多普勒效应从与目标竞争的、多余的回波即所谓杂波中分离出小的运动目标,杂波是从地面、海、雨和其它流体、箔条、鸟类、昆虫以及极光反射得到的典型回波。
主要区别:《雷达系统导论》认为MTI、PD雷达的区别是它们在脉冲雷达系统中多普勒频移(相对速度)、距离(时延)测量模糊度上的差异。
用低脉冲重复频率(PRF)可以克服距离模糊,用高PRF可克服多普勒频率模糊,但一般难以同时克服两种模糊。
通常MTI雷达的PRF选得较低,以便能克服距离模糊(即没有多次回波),但频率测量是模糊的并导致了盲速。
而PD雷达具有高的PRF,能克服盲速但存在距离模糊[3]p117~118。
《动目标显示和脉冲多普勒雷达》则认为MTI和PD雷达的区别不在于用低的、中等的或高的PRF,而在于MTI雷达是一个通带—阻带滤波器,而PD雷达是用一组相参积累滤波器。
因此有中PRF的MTI系统、低PRF的PD系统(如动目标检测器MTD)[31]p2。
MTI雷达利用一个梳状滤波器来消除杂波,滤波器的阻带设置在强杂波集中的范围上,而运动目标则通过杂波不占据的那些速度范围。
由于固定目标杂波背景的复杂性,MTI技术抑制地物杂波的能力往往受到限制,达不到对动目标检测的最佳效果。
PD雷达是分辨和增强在一个特定速度带内的目标,同时抑制掉杂波和感兴趣速度带外的其它回波,通常采用一个覆盖所感兴趣速度范围的、与目标响应匹配的相邻多普勒滤波器组,其作用是相对噪声而言相参地积累目标回波。
MTI和MTD解读

Wik e
j[ 2ik / N ]
,i 0,1,2...N 1
i表示第几个滤波器的抽头,k表示从0到N-1的标记,每一个k值对应一组 不同的加权值,即对应于不同的多普勒滤波器,每一个k值决定了一个独 立的滤波器的响应。
窄带滤波器组的每个抽头有N个输出,并且对应N个加权值,输入信号x(i) 与滤波器组Y(k)关系为
FFT实现
FFT将N个脉冲分成N个频段(对应N个窄带滤波器)做FFT运算,每个 频段分别积累N个脉冲时长的数据,每个点的运算相当于是一个带通滤 波器,每个滤波器都有一定的副瓣,可考虑使用窗函数加权抑制杂波。
但FFT滤波器在零频和脉冲重复频率整数倍处没有凹陷,所以无 法抑制静态杂波,需要考虑其他方式帮助解决。可以考虑添加MTI对消 器,或者将静态杂波对应的滤波器通道的输出去除。 此外,FFT需要回波脉冲串个数为2的整数次幂,同时如果想要 达到比较高的检测精度,FFT变换的点数不能太少,也就是需要更多的 回波脉冲串。但是在实际情况中,雷达的回波脉冲串个数是受多方面影 响,不可能随意变更的。这会使FFT滤波器组的应用受到一定的限制。
h1 (t ) (t ) (t T )
傅里叶变换为 H1 (w) 1 e jwt,w 2f
功率增益为 H1 ( w) H1 ( w) (1 e jwT )(1 e jwT )
* 2(1 cos wT Nhomakorabea) 4 sin 2 (
wT ) 2
双延迟线对消器:
零号滤波器,也就是K=0的滤波器,其通带中心位置分别是0,1/T,2/T.... 即零频和雷达重复频率的整数倍处,以雷达脉冲重复周期为周期,通带 正是静态杂波的频谱集中的位置,所以可以把此滤波器的输出看成是静 态杂波的输出。同理,K=n时的滤波器,其通带中心分别位于 n/NT,n/NT+1/T,n/NT+1/T....。 一般情况下,不同的滤波器对信噪比的改善不相同,如果几个滤波器的 通带靠近杂波频率谱的中心位置,那么他们的改善就相对差一些。因此, 如果杂波谱比较集中,采用MTD窄带滤波器可以得到较好的滤波性能。 但是,如果杂波的频谱分布比较宽,那么与MTI相比,窄带滤波器的改 善也就没那么明显。 此外,窄带滤波器对滤除低速运动杂波也有优势。因为低速目标杂波可 能只出现在滤波器组的某一个滤波器中,根据实际情况,如果此滤波器 频带内的噪声和杂波较强,则可适当提高此滤波器的门限电压,这样可 以很好的减小低速杂波的影响,同时又不影响其他滤波器的输出。
MIMO雷达的MTI处理及性能分析
MIMO雷达的MTI处理及性能分析MIMO(多输入多输出)雷达的MTI(移动目标指示)处理是利用MIMO雷达系统的多通道接收信号,在时域上实现目标速度信息的提取与处理。
MTI处理是雷达系统中常用的一种信号处理技术,主要用于探测和追踪移动目标。
MIMO雷达系统在传统雷达系统的基础上增加了多个发射和接收天线,可以提供更高的波束形成能力和灵敏度,从而可以更好地满足对目标的探测和跟踪要求。
在MTI处理中,MIMO雷达系统通过对多通道接收信号进行时延和相位差分处理,可以提取出目标的速度信息。
MTI处理主要包括以下几个步骤:1.零多普勒频移:利用多通道接收信号的相位差分,对雷达回波信号进行零多普勒频移。
这可以去除地物回波信号的零频偏移,突出移动目标信号。
2.时域滤波:对零多普勒频移后的信号进行时域滤波处理,以去除不感兴趣的杂波干扰。
常用的时域滤波方法包括矩形窗滤波、哈希窗滤波等。
3.目标检测:对滤波后的信号进行目标检测,以确定目标的存在与位置。
4.目标速度估计:利用多通道接收信号的相位差分,可以提取出目标的相对速度信息。
通过测量不同通道的相位差分,可以估计出目标的速度值。
MIMO雷达的MTI处理可以提供更准确和可靠的目标速度信息,有助于实现对多种目标的高效探测和追踪。
MIMO雷达系统的多通道接收可以提供更多的信息,增强相位差分的可观测性。
同时,MIMO雷达系统的波束形成能力和灵敏度也得到了提高,可以更好地抑制非移动目标干扰。
性能分析方面,主要从以下几个方面进行评估:1.目标探测概率:指MIMO雷达系统对目标的探测能力。
通过统计分析目标存在时系统的虚警概率和正确检测概率,可以评估系统的目标探测性能。
2.距离测量精度:指MIMO雷达系统对目标距离的测量精度。
通过统计分析目标距离的测量误差,可以评估系统的距离测量性能。
3.速度测量精度:指MIMO雷达系统对目标速度的测量精度。
通过统计分析目标速度的测量误差,可以评估系统的速度测量性能。
多速率 毫米波雷达信号处理

多速率毫米波雷达信号处理
多速率毫米波雷达信号处理是指对毫米波雷达采集到的回波信号进行处理,以提取出目标的速度等信息。
以下是一些常见的多速率毫米波雷达信号处理算法:
- 静态杂波滤除算法:
- 零速通道置零法:在2D-FFT(速度维FFT)后直接将R-V谱矩阵(RD图)速度通道中的零速通道或零速附近通道置零,此操作可使静止目标或者低速目标从R-V谱矩阵中消失。
- 动目标显示(MTI):利用杂波抑制滤波器来抑制杂波,提高雷达信号的信杂比,以利于运动目标检测的技术。
由于杂波谱通常集中在直流分量和雷达重复频率的整数倍处,而MTI滤波器利用杂波与运动目标的多普勒频率的差异,使得滤波器的频率响应在直流和PRF (脉冲重复频率)的整数倍处具有较深的阻带,而在其他频点的抑制较弱,从而通过较深的“凹口”抑制静止目标和静物杂波。
- 相量均值相消算法(平均相消算法):核心思想是求均值做差,静止目标到雷达天线的距离是不变的,每一束接收脉冲上静止目标的时延也是不变的,对所有接收脉冲求平均就可以得到参考的接收脉冲,然后用每一束接收脉冲减去参考接收脉冲就可以得到目标回波信号。
不同的多速率毫米波雷达信号处理算法适用于不同的应用场景和数据类型,在选择合适的算法时,需要考虑目标的运动状态、杂波环境以
及算法的计算复杂度等因素。
经典雷达资料-第15章动目标显示(MTI)雷达-3

经典雷达资料-第15章动目标显示(MTI)雷达-3图15.24显示了反馈对改善因子I的影响。
这些曲线是在假设天线的方向图只取(sin U)/U第一对零点之间的曲线情况下计算出的。
图示的无反馈的几条曲线与如图15.12所示显示的具有高斯形状方向图的理论曲线几乎完全相同(说明反馈对三路延迟对消器影响是一条曲线而不是直线,这是因为在3个零点中,已有两个零点不在原点上,并且根据波束宽度内有14个脉冲的实际情况,它们已沿单位圆移动了最佳量。
因此,当波束宽度内有40个脉冲时,这两个零点由于离原点太远而不起太大的作用)。
从理论上讲,采用数字滤波器来合成各种形状的速度响应曲线是可能的[16]。
对Z平面上的每对零点和每对极点而言,都需要两个延迟线,用前馈路径控制零点位置,而用反馈路径控制极点位置。
速度响应曲线的形状可以仅用前馈而不用反馈来实现。
不采用反馈的主要优点是对消器具有很好的瞬态响应,这是相控阵或系统存在脉冲噪声干扰时的一项重要的考虑因素。
如果相控阵雷达使用反馈对消器,则在对消器的瞬态振铃还未下降到容许的电平之前,波束就已经改变了位置,因而许多脉冲不得不落在波束以外。
人们已提出一种预置技术来缓解这种现象[20],但仅仅部分地降低瞬态稳定时间。
若只使用前馈,则在波束移动后仅有3个或4个脉冲被去掉。
采用前馈控制速度响应曲线的形状的缺点是,对每个用于形成速度响应的零点都需附加一个延迟线。
此外,若采用零点来形成速度响应,则曲线就会导致改善因子引入一个固有的损耗。
这个损失可能很重要也可能不重要,需根据杂波谱展宽的程度和对消所需零点数来确定。
图15.25画出了只用前馈形成的四脉冲对消器的速度响应曲线和Z平面图。
图中同时还画出了五脉冲前馈对消器和三脉冲反馈对消器的速度响应曲线。
在给出的对消器中,无论杂波谱扩展程度为多少,三脉冲反馈对消器的改善因子潜力均比四脉冲前馈对消器大约好4dB。
图15.24 扫描对具有反馈的对消器改善因子的限制曲线是在假定天线方向图只取sin U/U第一对零点之间的形状时,由计算机计算出来的。
雷达原理
1、MTI:动目标显示z基本原理:动目标显示雷达是在普通脉冲雷达基础上发展起来的。
这种体制的雷达能在杂波或噪声干扰背景中抑制固定干扰、探测运动目标信息。
其基本原理在于利用运动目标回波多普勒频移效应,借助固定目标回波同动目标回波经相检波输出的视频脉冲串在幅度上的差异,通过延迟对消实现动目标检测。
z功能:可在空对地、空对海、地对地场合发挥空中预警、目标指示或武器控制的功能。
z MIT信号的主要特征:(1)低重频,一般低于4KHZ(可保证无测距模糊);(2)采用参差重频、脉组间变重频及重频分集技术(获得目标速度信息,克服盲速);(3)载频主要分布于L、S波段;(4)有较高的雷达工作频率稳定度(为了提取动目标频移信息);(5)脉冲重频稳定度高(为实现延迟对消);2、PD雷达:脉冲多普勒雷达z基本原理:PD雷达是在MTI雷达的基础上建立起来的,比MTI有更强的杂波抑制能力,改善因子高达50-60dB,且具有普通脉冲雷达的距离分辨力及连续波雷达的速度分辨力。
PD雷达的PRF可分为高,中,低三种,其特点及用途也是根据PRF划分的。
一般而言,低重频PD雷达也就是MTI 雷达,所谓PD雷达主要指高,中重频的情形。
z功能:表 PD雷达的分类与功能分类 PRF范围 特点 功能高PRF 几十KHZ—几百KHZ 不存在速度模糊,但有距离模糊机载预警(高空)中PRF 10KHZ-20KHZ 存在速度模糊、距离模糊目标跟踪(近程低空)低PRF 不超过几KHZ 存在速度模糊,但没有距离模糊MTIz信号特征:(1) 信号为一组相干脉冲串,有高度的短期稳定性,无论工作频率,脉宽,脉位,脉幅要求苛刻.(2)PRI一般较高,大于5KHZ.(3)重频调变是其最大特点:重频参差、分段调频脉冲多普勒雷达在机载火控、机载预警、空中交通管制、导航、气象探测等 领域都己得到了广泛的应用,下面一一介绍其作为不同用途的信号特征差别: 1)机载火控目前世界上先进的战斗机火力控制雷达几乎毫无例外的都采用了PD体制。
MTI和MTDppt课件
脉冲响应的傅里叶变换就是频率响应函数:
N 1
Hk ( f )
hik e j 2T
i0
N 1
[
e ]e j 2i( fT k / N ) j 2 ( N 1)k / N
i0
13
滤波器振幅特性为
sin[N(fT - k/N)]
| Hk (f) ||
|
sin[ (fT - k/N)]
N 1
j 2i k
Y (k) x(i)e N , k 0,1,2...N 1
i0
x(0),x(1)...x(N-1)代表N个滤波器的输出,当N取2的整数次幂时,正好可 以使用快速傅里叶变换来实现。
实现MTD的窄带滤波器组的常用方法为 在频域用FFT实现 或 在时域用 FIR滤波器实现
9
零号滤波器,也就是K=0的滤波器,其通带中心位置分别是0,1/T,2/T....
Wik e j[2ik / N ],i 0,1,2... N 1
i表示第几个滤波器的抽头,k表示从0到N-1的标记,每一个k值对应一组 不同的加权值,即对应于不同的多普勒滤波器,每一个k值决定了一个独 立的滤波器的响应。
8
窄带滤波器组的每个抽头有N个输出,并且对应N个加权值,输入信号x(i)
与滤波器组Y(k)关系为
h1(t) (t) (t T ) 傅里叶变换为 H1 (w) 1 e jwt,w 2f
功率增益为 H1(w)H1* (w) (1 e jwT )(1 e jwT ) 2(1 coswT ) 4 sin 2 ( wT )
2
2
双延迟线对消器:
冲激响应:h2 (t) h1(t) h1(t T )
MTI(动目标显示)技术
(整理)经典雷达资料-第15章 动目标显示(MTI)雷达-5

经过修正的相位噪声谱密度如图15.48所示。
相对于载波,总噪声功率可由曲线下面的噪声功率积分来决定。
每段功率谱密度随频率变化的方程为图15.46 微波振荡器的单边带相位噪声谱密度和有效噪声密度图15.47 基于系统参数对微波振荡器相位噪声的修正(系统参数见书中内容)图15.48 组合修正和修正后的相位噪声谱密度⎥⎥⎦⎤⎢⎢⎣⎡⨯=)lg(101110)(f f f p f p 斜率 (15.28)式中,P f 1为在f 1的功率谱密度,单位是W/Hz (为方便起见,载波功率假设为1W );“斜率”为该段的斜率,单位是dB/10倍频程;f 1为P f 1处的频率。
对于具有恒定斜率的的每段频谱而言,该方程可以用Vigneri 方法[31]或用带积分功能的计算器(如Hewlett Packard HP-15C )求积分运算。
表15.3给出这个例子的积分结果。
注意:假设条件是载波功率为1W ,如-149.4dBc/Hz 变成1.148×10-15W/Hz ,则在所有段计算积分功率时,先对它们求和,然后转化为dBc 。
最终结果-66.37dBc 就是由振荡器噪声导致的对改善因子I 的限制。
对I SCR (dB )的极限是I (dB )加上目标积累增益(dB )。
表15.3 用图15.47进行校正的如图15.46所示的相位噪声谱密度积分值发射脉冲的时间抖动会使MTI 系统的性能变坏。
时间抖动会使脉冲的前沿及后沿对消失败,而每一个未被对消的部分的幅度为∆t /τ。
这里,∆t 为抖动时间;τ为发射脉冲宽度。
总的剩余功率为2(∆t /τ)2,因此,由于时间抖动对改善因子所产生的限制为)]2/(lg[20t I ∆=τ(dB)。
对改善因子的这种限制是根据非编码发射脉冲并假定接收机带宽与发射脉冲持续时间相匹配得出的。
在脉冲压缩雷达系统中,接收机带宽较宽,以时间带宽积B τ计算,于是每个脉冲结束时杂波剩余功率按B τ积成比例增大。
动目标显示与脉冲多普勒雷达matlab程式设计
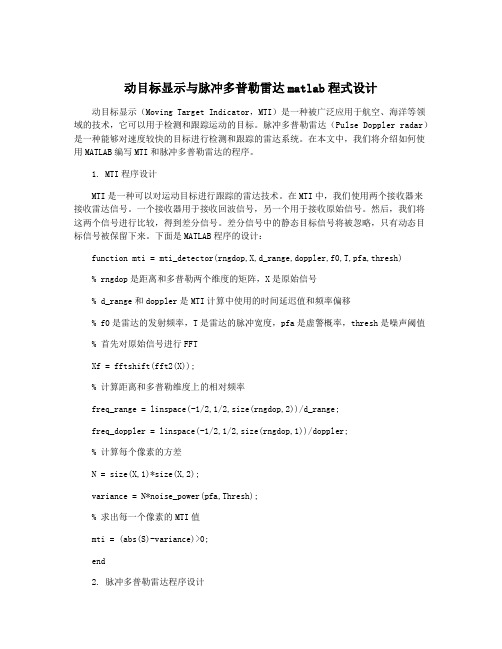
动目标显示与脉冲多普勒雷达matlab程式设计动目标显示(Moving Target Indicator,MTI)是一种被广泛应用于航空、海洋等领域的技术,它可以用于检测和跟踪运动的目标。
脉冲多普勒雷达(Pulse Doppler radar)是一种能够对速度较快的目标进行检测和跟踪的雷达系统。
在本文中,我们将介绍如何使用MATLAB编写MTI和脉冲多普勒雷达的程序。
1. MTI程序设计MTI是一种可以对运动目标进行跟踪的雷达技术。
在MTI中,我们使用两个接收器来接收雷达信号。
一个接收器用于接收回波信号,另一个用于接收原始信号。
然后,我们将这两个信号进行比较,得到差分信号。
差分信号中的静态目标信号将被忽略,只有动态目标信号被保留下来。
下面是MATLAB程序的设计:function mti = mti_detector(rngdop,X,d_range,doppler,f0,T,pfa,thresh)% rngdop是距离和多普勒两个维度的矩阵,X是原始信号% d_range和doppler是MTI计算中使用的时间延迟值和频率偏移% f0是雷达的发射频率,T是雷达的脉冲宽度,pfa是虚警概率,thresh是噪声阈值 % 首先对原始信号进行FFTXf = fftshift(fft2(X));% 计算距离和多普勒维度上的相对频率freq_range = linspace(-1/2,1/2,size(rngdop,2))/d_range;freq_doppler = linspace(-1/2,1/2,size(rngdop,1))/doppler;% 计算每个像素的方差N = size(X,1)*size(X,2);variance = N*noise_power(pfa,Thresh);% 求出每一个像素的MTI值mti = (abs(S)-variance)>0;end2. 脉冲多普勒雷达程序设计脉冲多普勒雷达是一种可以对速度较快的目标进行检测和跟踪的雷达系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
I的影响。
这些曲线是在假设天线的方向图只取(sin U)/U第一对零点之间的曲线情况下计算出的。
图示的无反馈的几条曲线与如图15.12所示显示的具有高斯形状方向图的理论曲线几乎完全相同(说明反馈对三路延迟对消器影响是一条曲线而不是直线,这是因为在3个零点中,已有两个零点不在原点上,并且根据波束宽度内有14个脉冲的实际情况,它们已沿单位圆移动了最佳量。
因此,当波束宽度内有40个脉冲时,这两个零点由于离原点太远而不起太大的作用)。
从理论上讲,采用数字滤波器来合成各种形状的速度响应曲线是可能的[16]。
对Z平面上的每对零点和每对极点而言,都需要两个延迟线,用前馈路径控制零点位置,而用反馈路径控制极点位置。
速度响应曲线的形状可以仅用前馈而不用反馈来实现。
不采用反馈的主要优点是对消器具有很好的瞬态响应,这是相控阵或系统存在脉冲噪声干扰时的一项重要的考虑因素。
如果相控阵雷达使用反馈对消器,则在对消器的瞬态振铃还未下降到容许的电平之前,波束就已经改变了位置,因而许多脉冲不得不落在波束以外。
人们已提出一种预置技术来缓解这种现象[20],但仅仅部分地降低瞬态稳定时间。
若只使用前馈,则在波束移动后仅有3个或4个脉冲被去掉。
采用前馈控制速度响应曲线的形状的缺点是,对每个用于形成速度响应的零点都需附加一个延迟线。
此外,若采用零点来形成速度响应,则曲线就会导致改善因子引入一个固有的损耗。
这个损失可能很重要也可能不重要,需根据杂波谱展宽的程度和对消所需零点数来确定。
图15.25画出了只用前馈形成的四脉冲对消器的速度响应曲线和Z平面图。
图中同时还画出了五脉冲前馈对消器和三脉冲反馈对消器的速度响应曲线。
在给出的对消器中,无论杂波谱扩展程度为多少,三脉冲反馈对消器的改善因子潜力均比四脉冲前馈对消器大约好4dB。
图15.24 扫描对具有反馈的对消器改善因子的限制曲线是在假定天线方向图只取sin U/U第一对零点之间的形状时,由计算机计算出来的。
五脉冲对消器被Zverev称为线性相位[21]MTI滤波器[22]。
4个零点分别位于Z平面实轴的+1,+1,-0.3575和-2.7972。
许多关于滤波器综合的文献都描述过这种线性相位的滤波器,但对MTI应用而言,线性相位并不重要。
如图15.25所示,若采用非线性相位滤波器只需要极少的脉冲就可以得到几乎和线性相位滤波器相同的响应曲线。
由于在波束照射目标期间可利用的脉冲数是固定的,一个也不能浪费,所以人们应当选用那些只使用极少脉冲数的非线性相位滤波器。
图15.25 赋形速度响应曲线的前馈对消器与三脉冲反馈对消器的比较(见正文五脉冲对消器的参数)15.8 杂波滤波器组的设计如同15.1节的讨论,MTD采用的波形包括相同PRF和相同射频频率的N个脉冲的相参处理间隔(CPI)。
从一个CPI到下一个CPI的脉冲重复频率和射频频率有可能是变化的。
在这一约束条件下,只有选用有限冲激响应(FIR)滤波器的方法才是设计滤波器组惟一可行的设计方法(无论是PRF还是射频频率改变,反馈滤波器需要许多脉冲回波才能达到稳定,这显然是不实际的)。
在监视雷达波束照射目标期间,可利用的脉冲数是由诸如波束宽度、PRF、需扫描的空域和所要求的数据更新率等系统参数和系统要求决定的。
一旦约定了照射到目标的脉冲数,设计师就必须决定在此期间须有多少个CPI和每个CPI内有多少个脉冲。
要想采取折中方案通常是困难的。
设计师希望在一个CPI中使用更多的脉冲,以便能采用更佳的滤波器,但也希望有尽可能多的CPI。
多个CPI(以不同的脉冲重复频率或不同射频工作)可改善系统的检测性能,而且能提供用于检测目标实际径向速度所需的信息[23]。
在多普勒滤波器组中,单个滤波器的设计是频率副瓣要求和滤波器相参积累增益之间的一个折中。
对一个给定的CPI来说,所要求的多普勒滤波器数目则是硬件复杂性和滤波器交叠时的交叉损失间的一个折中。
最后,若要求在零多普勒(地杂波)处具有更高的杂波抑制能力,则常常会引入特殊的设计约束条件。
当一个CPI内的脉冲数大于或等于16时,快速傅里叶变换(FFT)算法的系统设计方法和有效实现特别引人注意。
由于在单个相参处理间隔中采用恰当的时域回波加权函数,因此很容易控制频域副瓣。
进一步地讲,覆盖整个多普勒空间(等于雷达PRF)所需要的滤波器的数量(等于变换阶数)可独立选择,与CPI无关,详见后面所述。
当CPI变小(小于或等于10)时,为了获得较好的整机性能,研究单个滤波器的特殊设计,使其满足不同多普勒频率特定的杂波抑制要求就显得非常重要。
在受特定通带和阻带约束的FIR滤波器设计中,尽管某些系统方法是可行的,但是对较小的CPI而言,直接的方法是凭试验调整每个滤波器的各个零点直到获得所需要的响应为止。
下面给出一个这种滤波器设计的实例。
滤波器的经验设计如下是六脉冲CPI滤波器经验设计的一个实例(每个CPI的6个脉冲可根据系统条件,如照射目标的时间直接推出)。
由于滤波器要使用6个脉冲,并且只有5个零点是可用于滤波器设计的,所以可利用的零点数等于脉冲数减1。
滤波器的设计过程包括设置各个零点,以便得到符合指定约束条件的滤波器组响应。
下面的实例是由一个交互式计算机程序得出的,该程序可移动滤波器的零点直到得到预期的响应为止。
假定滤波器的要求如下:(1)在动目标滤波器的杂波抑制凹口(相对于目标的峰值响应)中,响应为-66dB;(2)对速度介于多普勒模糊频率范围的±20%间的箔条杂波抑制为-46dB;(3)由于硬件的限制,因此仅采用5个滤波器;(4)在5个滤波器中,3个用于抑制固定杂波而响应动目标,另两个则响应零多普勒频率目标和其模糊点(具有好的固定杂波抑制能力的滤波器,采用两个或多个相参滤波器来覆盖零速响应的凹口)。
基于以上考虑即可构造滤波器组。
图15.26(a)给出了滤波器在多普勒通带中央的目标响应曲线。
零速附近的副瓣从峰值下降66dB,因此在零多普勒频率5%之内有很好的杂波抑制性能,-46dB的副瓣有?16%的箔条杂波抑制性能。
由于5个有效零点的限制,所以这种滤波器对?20%多普勒频移不能提供-46dB的抑制。
图15.26(b)给出了滤波器对尽可能接近于零多普勒频率的目标响应曲线。
此时,零多普勒响应为-66dB。
若在零多普勒附近设置两个零点,则所提供的零多普勒杂波响应是-66dB。
当相对多普勒频移为0.8~1.0时,多普勒滤波器副瓣提供48dB的箔条杂波抑制。
这个滤波器的镜像用于第3个移动的多普勒滤波器(镜像滤波器的系数是原滤波器系数的复共轭)。
图15.26(a)响应f T = 0.5目标的六脉冲滤波器图15.26(b)响应f T = 0.3目标的六脉冲滤波器(可滤除固定杂波)图15.26(c)给出了第一个滤波器设计在零多普勒处的响应曲线。
已考虑到将滤波器组的跨接损失减到最小(这就决定了最大值位置),在0.8多普勒频移处对箔条杂波的响应下降到46dB,并且失配损耗最小。
失配损耗最小化是通过在0.3~0.8多普勒频移之间的副瓣上升到所需的高度来实行的(在这个区域内副瓣降低,则失配损耗增加),第二个零多普勒滤波器是它的镜像。
图15.26(d)给出了滤波器组的合成响应曲线。
注意,滤波器的峰值被相当均匀地分配。
第一个零多普勒滤波器和第一个运动的多普勒滤波器之间的差别要比其他的大,主要是因为在此限制下,不能移动第一多普勒滤波器接近零速。
图15.26(c)响应f T = 0.8目标的六脉冲滤波器(可滤除f T = 0.8的箔条)图15.26(d) 5个六脉冲滤波器组成滤波器组的合成响应曲线切比雪夫滤波器组对于在CPI中脉冲数较多的情况而言,希望有一个更加系统的滤波器设计方法。
如果多普勒滤波器的设计准则选定,即要求主响应之外滤波器副瓣响应低于规定值(即提供恒定的杂波抑制电平),同时使滤波器响应宽度最小,那么基于多尔夫-切比雪夫分布的滤波器设计就是最佳方案。
在天线文献中能找到基于多尔夫-切比雪夫分布的特性和设计方法。
九脉冲CPI和一个68dB副瓣电平的切比雪夫滤波器设计例子如图15.27所示。
通过给滤波器系数加一个线性相位项,能将峰值滤波器的频率响应定位于任意位置。
实现覆盖全部多普勒频率所需的滤波器总数,在设计时要权衡滤波器交叠期间的跨接损耗和实现中复杂程度之间的得失。
图15.28为一个用9个均匀间隔滤波器组成的完整的多普勒滤波器组的实例。
对照如图15.18所示所认定的杂波模型,这一滤波器组的性能,如图15.29所示。
此图显示,对于零多普勒杂波,信杂比改善是目标多普勒频率的函数。
在每个目标多普勒频率处只画出能提供最大改善的滤波器响应曲线。
为了便于比较,取如图15.18所示的最佳曲线用虚线画出,对于指定的杂波模型,可给出切比雪夫滤波器设计性能良好程度的直接评价。
同时也显示了最佳滤波器和切比雪夫滤波器组二者的平均SCR 的改善程度。
图15.27 68dB多普勒副瓣的切比雪夫FIR滤波器设计图15.28 CPI为9脉冲时68dB切比雪夫多普勒滤波器组响应曲线图15.29 68dB切比雪夫多普勒滤波器组的SCR改善与最佳值的比较图15.30说明了作为杂波谱相对扩展函数的68dB切比雪夫滤波器组的平均SCR改善和最佳值曲线(出自如图15.19所示中)。
由于在滤波器组中所用的滤波器数量有限,因此若有多普勒频移引入到杂波回波中,则对平均SCR的改善程度会有一定的影响。
图中的斜线阴影部分不仅说明了这种影响,也显示了对所有可能的多普勒频移情况下平均SCR改善程度的上、下限。
这种偏差将随多普勒滤波器组中所用滤波器个数的减少而增大。
图15.30 如图15.28所示的68dB切比雪夫多普勒滤波器组的平均SCR改善CPI = 9脉冲,最佳值取自如图15.19所示中。
FFT滤波器组对大量并联的多普勒滤波器而言,使用FFT算法将大大减化硬件。
这种算法要求滤波器组中的所有滤波器具有相同的响应,而且这些滤波器沿多普勒轴均匀排列。
然而,对给定大小的CPI所需滤波器的数目是可变的。
例如,在接收回波已按所需的滤波响应加权后(如切比雪夫加权),通过以额外的零值扩展接收数据的方法(也称补零)可获得更大数目的滤波器数。
15.9 参差脉冲重复频率参差的设计方法改变雷达脉冲之间的间隔,目的是移开相当于MTI系统盲速的目标速度。
可以在扫描之间、脉冲之间或驻留之间(每次驻留是波束宽度的一部分)改变脉冲的间隔。
每种方法都各有优点。
在扫描之间改变脉冲间隔方法的优点是雷达系统比较易于制造,并且时间上多次循环出现的杂波在功率放大器MTI系统中被对消。
为了使没有参差的MTI系统更好地工作,就要求发射机能稳定地工作,但是这样不仅要多花钱,而且设备的重量也更重。
在脉冲之间或驻留之间进行参差工作的雷达,要使发射机能够充分稳定地工作就更为困难。