伺服电机要配行星减速机使用的好处
设备用行星减速机的原因
设备用行星减速机的原因
行星减速机是一种高精度、高扭矩的减速器,它由行星轮、太阳轮、内齿圈等组成。
在工业生产过程中,行星减速机被广泛应用于各种机械设备中,例如纺织机械、印刷机械、食品机械等等。
以下是设备使用行星减速机的原因:
1. 高精度:行星减速机采用多齿轮传动方式,具有非常高的精度,可以达到极高的
精度要求。
这种减速器可以有效地降低运动中的噪音和振动,在精度要求高的设备中尤其
重要。
2. 高扭矩:行星减速机采用了内外齿圈的设计,能够使输出端的扭矩提高到很高的
水平,具有很好的输出能力。
这种减速器在大扭矩设备中应用非常广泛。
3. 节能:行星减速机的机构相对简单,内部的动件数量比较少,因此摩擦力相对较小。
同时,使用行星减速机可以有效地减少设备的运转能耗,节约能源,降低企业的生产
成本。
4. 寿命长:行星减速机内部的轴承选用了高品质的轴承材料,具有极高的耐磨性和
承载能力,能够保证减速器的长期稳定运转,延长设备的使用寿命。
5. 小体积:行星减速机结构紧凑,占用空间小,方便安装和维修。
这种减速器可以
在较小的空间内提供足够的输出功率。
综上所述,行星减速机具有高精度、高扭矩、节能、寿命长、小体积等优点,因此在
各种机械设备中广泛应用。
随着科技的不断发展,行星减速机将会不断完善和改进,为各
行各业的生产提供更加出色的支持。
伺服减速原理

伺服减速原理
伺服减速原理是指通过使用伺服电机和减速器的组合来实现精确的转速控制和扭矩输出。
伺服电机是一种高性能的电动机,能够根据外界的反馈信号进行精确的位置和速度控制。
而减速器则是用来减小输出转速,增加输出扭矩的装置。
在伺服减速原理中,控制系统会通过对伺服电机进行电流和电压的控制,使得电机输出的转矩和转速达到预定值。
控制系统会根据外界的反馈信号,比如位置传感器或编码器的信号,实时地调整电机的控制信号,使得电机能够准确地控制输出。
减速器的作用是将电机的高速低扭矩输出转为低速高扭矩输出,以满足实际应用需求。
常用的减速器有齿轮减速器、行星减速器等,它们能够将电机输出的转速降低数十倍甚至更多,并相应地提高输出扭矩。
减速器的选择要考虑到负载的要求,比如扭矩和速度的需求,同时还要考虑到减速器的传动效率和可靠性。
通过将伺服电机和减速器结合起来,可以实现高精度和高可靠性的转速控制。
伺服减速原理广泛应用于各种需要精确位置和速度控制的场合,比如工业自动化、机械加工、印刷设备等。
它能够提高生产效率,减少人工操作的误差,并且能够适应各种复杂的工作环境。
行星齿轮减速器的优缺点
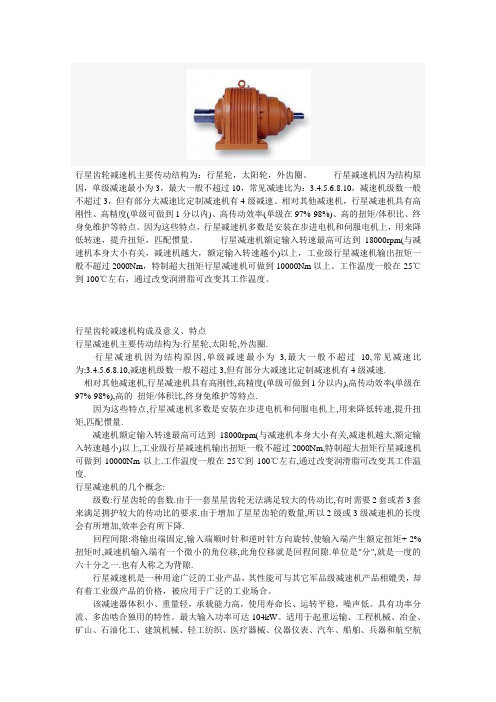
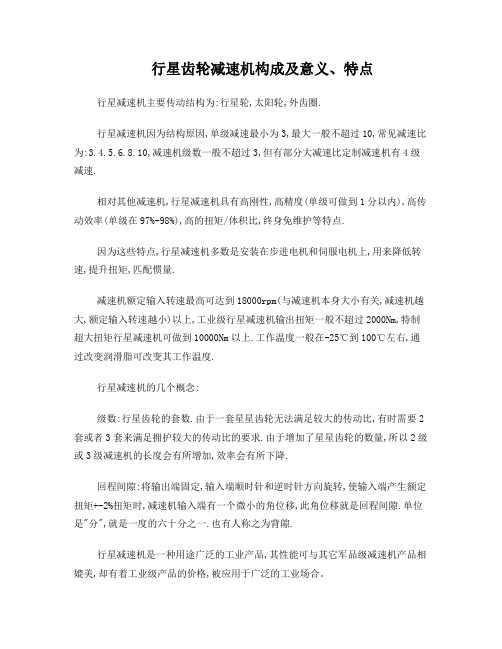
行星齿轮减速机主要传动结构为:行星轮,太阳轮,外齿圈。
行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速。
相对其他减速机,行星减速机具有高刚性、高精度(单级可做到1分以内)、高传动效率(单级在97%-98%)、高的扭矩/体积比、终身免维护等特点。
因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量。
行星减速机额定输入转速最高可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可做到10000Nm以上。
工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度。
行星齿轮减速机构成及意义、特点行星减速机主要传动结构为:行星轮,太阳轮,外齿圈.行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速.相对其他减速机,行星减速机具有高刚性,高精度(单级可做到1分以内),高传动效率(单级在97%-98%),高的扭矩/体积比,终身免维护等特点.因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量.减速机额定输入转速最高可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可做到10000Nm以上.工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度.行星减速机的几个概念:级数:行星齿轮的套数.由于一套星星齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降.回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙.行星减速机是一种用途广泛的工业产品,其性能可与其它军品级减速机产品相媲美,却有着工业级产品的价格,被应用于广泛的工业场合。
行星齿轮减速机构成及意义、特点
行星齿轮减速机构成及意义、特点行星减速机主要传动结构为:行星轮,太阳轮,外齿圈.行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:3.4.5.6.8.10,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速.相对其他减速机,行星减速机具有高刚性,高精度(单级可做到1分以内),高传动效率(单级在97%-98%),高的扭矩/体积比,终身免维护等特点.因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量.减速机额定输入转速最高可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可做到10000Nm以上.工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度.行星减速机的几个概念:级数:行星齿轮的套数.由于一套星星齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降.回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙.行星减速机是一种用途广泛的工业产品,其性能可与其它军品级减速机产品相媲美,却有着工业级产品的价格,被应用于广泛的工业场合。
该减速器体积小、重量轻,承载能力高,使用寿命长、运转平稳,噪声低。
具有功率分流、多齿啮合独用的特性。
最大输入功率可达104kW。
适用于起重运输、工程机械、冶金、矿山、石油化工、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器和航空航天等工业部门行星系列新品种WGN定轴传动减速器、WN 子母齿轮传动减速器、弹性均载少齿差减速器。
伺服电机要配行星减速机使用的好处

伺服电机要配行星减速机使用的好处现代工业设备随着伺服电机技术的发展被应用的越来越广泛,从高扭矩密度乃至于高功率密度,使转速的提升高过3000rpm,由于转速的提升,使得伺服电机的功率密度大幅提升。
这意味着伺服电机是否需要搭配减速机,那么问题就来了伺服电机行星减速机的应用场合都有那些?这样搭配的好处是什么?1、重负何高精度:一般像是航空、卫星、医疗、军事科技、晶圆设备、机器人等自动化设备。
他们的共同特征在于将负载移动所需的扭矩往往远超过伺服电机本身的扭矩容量。
而透过减速机来做伺服电机输出扭矩的提升2、提升扭矩:输出扭矩提升的方式,可能采用直接增大伺服电机的输出扭矩方式,但这种方式不但必须使用昂贵大功率的伺服电机,马达还要有更强壮的结构,扭矩的增大正比于控制电流的增大,此时采用比较大的驱动器,功率电子组件和相关机电设备规格的增大,又会使控制系统的成本大幅增加。
3、增加使用效率:理论上,提升伺服电机的功率也是输出扭矩提升的方式,可藉由增加伺服马达两倍的速度来使得伺服系统的功率密度提升两倍,而且不需要增加伺服驱动器等控制系统组件的规格,也就是不需要增加额外的成本。
而这就需透过的搭配来到达提升扭矩的目的了。
所以说,高功率伺服电机的发展是必须搭配应用减速机,而非将其省略不用。
4、提高使用性能:据了解,负载惯量的不当匹配,是伺服控制不稳定的最大原因之一。
对于大的负载惯量,可以利用减速比的平方反比来调配最正确的等效负载惯量,以获得最正确的控制响应。
所以从这个角度来看,行星减速机为伺服应用的控制响应的最正确匹配。
5、增加设备使用寿命:行星减速机还可有效解决电机低速控制特性的衰减。
由于伺服电机的控制性会由于速度的降低,导致产生某程度上的衰减,尤其在对于低转速下的讯号撷取和电流控制的稳定性上,特别容易看出。
因此,采用减速机能使电机具有较高转速。
讲了这么多内容大家应该很清楚我们为什么在使用伺服电机要搭配行星减速机来工作了,这样不仅提高工作效率还可以降低成本。
伺服电机2KW搭配25速比精密行星减速机

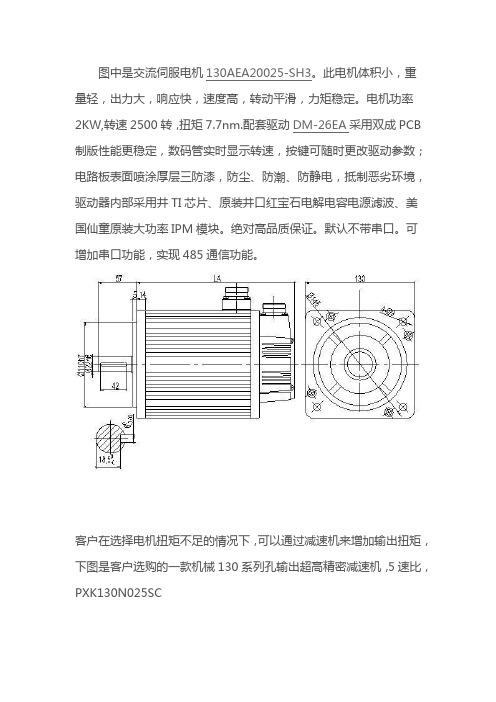
上图中是交流伺服电机130AEA20025-SH3。
此电机体积小,重量轻,出力大,响应快,速度高,转动平滑,力矩稳定。
电机功率
2KW,转速2500转,扭矩7.7nm.配套驱动DM-26EA采用双成PCB制版性能更稳定,数码管实时显示转速,按键可随时更改驱动参数;电路板表面喷涂厚层三防漆,防尘、防潮、防静电,抵制恶劣环境,驱动器内部采用井TI芯片、原装井口红宝石电解电容电源滤波、美国仙童原装大功率IPM模块。
绝对高品质保证。
默认不带串口。
可增加串口功能,实现485通信功能。
客户在选择电机扭矩不足的情况下,可以通过减速机来增加输出扭矩,下图是客户选购的一款机械130系列孔输出超高精密减速机,5速比,PXK130N025SC
搭配2KW伺服电机,输出扭矩为7.7*25*95%=182NM≤250NM (减速机能承受的额定输出扭矩)因此可以输出182NM的力,输出转速为2500/25=100转每分钟
机械款孔输出行星减速机内部齿轮采用优质低碳合金钢,经渗碳淬火,研磨跑合,具有体积小,重量轻,承载能力高,使用寿命长,运转平稳,噪声低,输出扭矩大,速比大,效率高,性能安全的特点。
广泛应用于数控自动化设备当中。
具体尺寸图如下:。
伺服行星齿轮箱和伺服电机的关系

伺服行星齿轮箱和伺服电机的关系伺服行星齿轮箱和伺服电机是在自动控制系统中起着至关重要作用的两种核心部件。
它们之间的紧密关系对于系统的性能和稳定性有着至关重要的影响。
下面将从多个方面来探讨伺服行星齿轮箱和伺服电机之间的关系。
1.工作原理伺服行星齿轮箱是一种特殊的行星齿轮传动装置,它主要由太阳轮、行星轮、行星架和内齿圈等部件组成。
伺服电机则是一种能够根据控制信号精确地调节输出转矩和角度的电动机。
伺服行星齿轮箱的主要作用在于改变传动的速度和转矩,而伺服电机则负责根据控制信号调节输出的运动状态。
两者共同配合,完成系统的精准控制。
2.协同作用伺服行星齿轮箱和伺服电机之间存在着协同作用。
伺服行星齿轮箱具有高传动精度、大传动比和小体积等特点,能够将电机输出的高速低扭矩转换成低速大扭矩。
而伺服电机能够根据控制信号输出精准的转矩和角度,两者共同协作,实现系统的精准位置控制和运动控制。
3.性能影响伺服行星齿轮箱和伺服电机之间的匹配关系直接影响着系统的性能。
合理的行星齿轮箱选型能够提高系统的输出扭矩和精度,降低系统的惯性和噪音;而合适的电机选择则能够保证系统的动态响应和精准度。
对于伺服系统的设计和应用来说,需要综合考虑齿轮箱和电机之间的匹配关系,以达到最佳的性能指标。
4.应用领域由于伺服行星齿轮箱和伺服电机具有精密控制、高效能转换和稳定性好等特点,因此在工业自动化、机器人、航空航天、医疗器械等领域有着广泛的应用。
在机器人领域,伺服系统能够实现机械臂的灵活控制和精准定位;在医疗器械领域,伺服系统能够实现高精度的医疗设备运动控制。
伺服行星齿轮箱和伺服电机的关系对于这些应用领域的性能要求至关重要。
5.发展趋势随着科技的不断发展,伺服行星齿轮箱和伺服电机的关系也在不断进一步优化和发展。
随着材料和加工工艺的不断提升,行星齿轮箱的传动精度和扭矩密度有望进一步提高;另随着控制技术的不断创新,伺服电机的精准度和动态性能也将得到进一步的提升。
2KW伺服电机搭配25速比精密孔输出行星减速机输出扭矩182NM(LP)
图中是交流伺服电机130AEA20025-SH3。
此电机体积小,重量轻,出力大,响应快,速度高,转动平滑,力矩稳定。
电机功率
2KW,转速2500转,扭矩7.7nm.配套驱动DM-26EA采用双成PCB 制版性能更稳定,数码管实时显示转速,按键可随时更改驱动参数;电路板表面喷涂厚层三防漆,防尘、防潮、防静电,抵制恶劣环境,驱动器内部采用井TI芯片、原装井口红宝石电解电容电源滤波、美国仙童原装大功率IPM模块。
绝对高品质保证。
默认不带串口。
可增加串口功能,实现485通信功能。
客户在选择电机扭矩不足的情况下,可以通过减速机来增加输出扭矩,下图是客户选购的一款机械130系列孔输出超高精密减速机,5速比,PXK130N025SC
搭配2KW伺服电机,输出扭矩为7.7*25*95%=182NM≤250NM (减速机能承受的额定输出扭矩)因此可以输出182NM的力,输出转速为2500/25=100转每分钟
机械款孔输出行星减速机内部齿轮采用优质低碳合金钢,经渗碳淬火,研磨跑合,具有体积小,重量轻,承载能力高,使用寿命长,运转平稳,噪声低,输出扭矩大,速比大,效率高,性能安全的特点。
广泛应用于数控自动化设备当中。
具体尺寸图如下;。
750W3000转伺服电机配什么型号的减速机

具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外观美观、安装方便、定位精准等特点。
适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品联接。
KF系列精密伺服行星减速机:为方形法兰设计,安装尺寸简单方便。
型号分:KF40、KF60、KF90、KF120、KF160、KF200等常用机座型号。
速比:4~1000有20多种比速可选择;分一、二、三减速传动;精度:一级传动精度在5-10弧分,二级传动精度在7-12弧分;三级传动精度在9-15弧分;有数百种规格。
应用领域:伺服行星减速机可直接安装到交流和直流伺服马达上,广泛应用于中等精度程度的工业领域。
如:精密机床、焊接设备、自动切割设备、包装设备,太阳能、工业机器人、印刷设备、精密测试仪器等自动化数控设备的应用。
性能和特点:KF系列精密伺服行星减速机提供了高性价比,应用广泛、经济实用、寿命长等优点,在伺服控制的应用上,发挥了良好的伺服刚性效应,准确的定位控制,在运转平台上具备了中低背隙,高效率,高输入转速,高输入扭矩,运转平順,低噪音等特性,外观及结构设计轻小。
使用免更换的润滑油,及无论安装在何处,都可以免维修操作全封闭式设计,并且具有IP65的保护程度,因此工作环境差时亦可使用。
KFKF配备电机LA LZ S LR LB LE LC L1(一级传动) L2(二级传动) L3(三级传动)200W 70 4-M4 11(F7)35 50(H7) 5 64 126 145 164 400W 70 4-M4 14(F7)35 50(H7) 5 64 126 145 164配备电机LA LZ S LR LB LE LC L1(一级传动) L2(二级传动) L3(三级传动)400W 70 4-M4 14F7 35 50(H7) 5 90 165 188 211750W 90 4-M5 19F7 35 70(H7) 5 90 165 188 211 1500W 145 4-M8 22F7 55 110(H7) 5 130 185 208 231。
伺服行星减速电机

伺服行星减速电机
1 什么是伺服行星减速电机?
伺服行星减速电机是一种通过行星传动机构减速的电机,它能够
稳定运行并输出精确的转矩和转速,被广泛应用于自动化控制、数控
机床、机器人等领域。
2 伺服行星减速电机的优点
伺服行星减速电机具有以下几个优点:
1.高精度:通过行星传动机构的设计,减少了齿间间隙,从而提
高了传动的精度,能够达到较高的转矩和转速;
2.稳定性好:因为采用了行星传动机构,使得齿轮转动更加平稳,从而提高了电机的稳定性,减少了振动和噪音;
3.寿命长:伺服行星减速电机使用寿命较长,因为行星传动机构
能够分担载荷,减少了齿轮之间的磨损,从而延长了电机的使用寿命;
4.体积小:由于行星传动机构可以将减速比放大,这样就可以得
到较大的输出转矩,同时体积也能更小。
3 伺服行星减速电机的应用
伺服行星减速电机广泛应用于自动化控制、数控机床、机器人、
通信设备、医疗器械等领域。
在数控机床领域,伺服行星减速电机可
以改变工件的转速和方向,从而实现不同的加工目的;在机器人领域,
伺服行星减速电机可以驱动机器人进行精确的运动和动作,完成复杂的任务。
在其它领域中也有广泛应用。
4 怎样选购伺服行星减速电机?
选购伺服行星减速电机需要考虑一些因素,如输出转矩、输出转速、轴向荷载、工作温度范围、电机型号等。
购买时建议选择品牌知名、信誉良好的厂家,且先了解自己的需求和应用场景,以便选择合适的型号和规格。
同时,需要注意电机的安装、运行和维护,以保证其稳定运行和延长使用寿命。
行星齿轮减速器的优缺点

行星齿轮减速机主要传动结构为:行星轮,太阳轮,外齿圈。
行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:,减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速。
相对其他减速机,行星减速机具有高刚性、高精度(单级可做到1分以内)、高传动效率(单级在97%-98%)、高的扭矩/体积比、终身免维护等特点。
因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量。
行星减速机额定输入转速最高可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可做到10000Nm以上。
工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度。
行星齿轮减速机构成及意义、特点行星减速机主要传动结构为:行星轮,太阳轮,外齿圈.行星减速机因为结构原因,单级减速最小为3,最大一般不超过10,常见减速比为:减速机级数一般不超过3,但有部分大减速比定制减速机有4级减速.相对其他减速机,行星减速机具有高刚性,高精度(单级可做到1分以内),高传动效率(单级在97%-98%),高的扭矩/体积比,终身免维护等特点.因为这些特点,行星减速机多数是安装在步进电机和伺服电机上,用来降低转速,提升扭矩,匹配惯量.减速机额定输入转速最高可达到18000rpm(与减速机本身大小有关,减速机越大,额定输入转速越小)以上,工业级行星减速机输出扭矩一般不超过2000Nm,特制超大扭矩行星减速机可做到10000Nm以上.工作温度一般在-25℃到100℃左右,通过改变润滑脂可改变其工作温度.行星减速机的几个概念:级数:行星齿轮的套数.由于一套星星齿轮无法满足较大的传动比,有时需要2套或者3套来满足拥护较大的传动比的要求.由于增加了星星齿轮的数量,所以2级或3级减速机的长度会有所增加,效率会有所下降.回程间隙:将输出端固定,输入端顺时针和逆时针方向旋转,使输入端产生额定扭矩+-2%扭矩时,减速机输入端有一个微小的角位移,此角位移就是回程间隙.单位是"分",就是一度的六十分之一.也有人称之为背隙.行星减速机是一种用途广泛的工业产品,其性能可与其它军品级减速机产品相媲美,却有着工业级产品的价格,被应用于广泛的工业场合。
伺服电机直角行星减速机

伺服电机直角行星减速机KBR系列精密伺服直角行星减速机:特点:为方形法兰转角式结构,具有精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、可解决轴向空间限制、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接,如:松下、台达、安川、富士、三菱、三洋、西门子、施耐德、法那克、科比、科尔摩根、AMK、帕克等等。
KBR系列精密伺服直角行星减速机:分KBR40、KBR60、KBR90、KBR115、KBR142、KBR180、KBR220、KBR280直角式常用机座型号,速比:3~1000有20多种比速可选择;分一级、二级和三级减速传动;精度:一级传动精度在5-8弧分,二级传动精度在7-10弧分;三级传动精度在9-12弧分;有数百种规格。
产品型号例如:KBR142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备,太阳能、工业机器人、医疗设备、精密测试仪器等高精度场合的应用。
性能及特点:1、行星齿轮的传动介面采用不含保持器之满针滚针轴承,增加接触面积以提高结构刚性及输出扭矩;2、采用3D/PORE的设计分析技术,分别对螺旋齿面作齿形及导程修整,以降低齿轮对啮入及啮出的冲击和噪音,增加齿轮系的使用寿命;3、齿轮材料选用高级的铬钼钒合金钢,经调质热处理至基材硬度30HRC,再利用本厂先进的离子氮化设备将齿轮表面的硬度氮化至840HV,以获得最佳的耐磨耗和耐冲击韧性;4、行星臂架与输出轴采用一体式的结构设计,且输出轴的轴承配置采用大跨距设计确保最大的扭转刚性和输出负载能力;5、使用NYOGEL792D合成润滑油脂,并采用IP65防护等级的密封设计,润滑油不泄露,免维护;6、输入端与马达的连接采用筒夹式的锁紧机构并经动平衡分析,以确保在高输入转速下结合介面的同心度和零背隙的动力传递;7、整支齿轮棒材制作出的太阳齿轮,刚性强,同心度准确;8、独特的马达连接板和轴衬的模组化设计,适用于任何伺服马达;9、齿轮箱表面利用无电解镍处理,马达连接板采用黑色阳极处理,提高环境的耐受性和抗腐蚀能力;10、齿轮箱和内环齿轮采用一体式的设计,结构紧凑、精密度高、输出扭矩.KBR系列精密行星减速机性能参数:规格单位段数速比KBR40 KBR60 KBR90 KBR115 KBR142 KBR180 KBR220 KBR280额定承受扭矩T2NNmL13 9.2 27.8 115 212 470 1226 1730 42304 14.8 46.32 142 268 582 1450 2270 51205 14.8 46.32 142 268 582 1450 2270 51207 8.6 38.9 110 212 468 1130 1610 322010 6.18 18.5 56 95 255 730 1050 1820L29 9.25 27.8 115 212 470 1226 1730 423015 14.8 46.32 142 268 582 1450 2270 512020 14.8 46.32 142 268 582 1450 2270 512025 14.8 46.32 142 268 582 1450 2270 512030 14.8 46.32 142 268 582 1450 2270 512035 14.8 46.32 142 268 582 1450 2270 512040 14.8 46.32 142 268 582 1450 2270 512050 14.8 46.32 142 268 582 1450 2270 512070 8.6 38.9 110 212 468 1130 1610 3320100 6.18 18.5 56 95 255 730 1050 1820L364 14.8 46.32 142 268 582 1450 2270 512080 14.8 46.32 142 268 582 1450 2270 5120100 14.8 46.32 142 268 582 1450 2270 5120150 14.8 46.32 142 268 582 1450 2270 5120200 14.8 46.32 142 268 582 1450 2270 5120250 14.8 46.32 142 268 582 1450 2270 5120350 14.8 46.32 142 268 582 1450 2270 5120400 14.8 46.32 142 268 582 1450 2270 5120500 14.8 46.32 142 268 582 1450 2270 5120700 8.6 38.9 110 212 468 1130 1610 32201000 6.18 18.5 56 95 255 730 1050 1820 最大承受扭矩T2BNm L1L2L33-10002.0倍额定输出扭矩额定输入转数n1Nrpm L1L2L33-10004000 4000 3500 3500 3000 3000 2500 2000 最大输入转数n1Brpm L1L2L33-10008000 8000 7000 7000 5000 4000 3500 3000 精密背隙P1arcminL1 3-10. ≤4≤4≤4≤4≤4≤4≤4≤4L2 9-100 ≤6≤6≤6≤6≤6≤6≤6≤6L364-1000≤7≤7≤7≤7≤7≤7≤7≤7标准背隙P2L1 3-10. ≤6≤6≤6≤6≤6≤6≤6≤6L2 9-100 ≤8≤8≤8≤8≤8≤8≤8≤8L364-1000≤10≤10≤10≤10≤10≤10≤10≤10容许径向力F1 N L1L2L33-1000780 850 2250 4700 6400 8500 40000 60000容许轴向力F2 N L1L2L33-1000390 450 1100 2350 3700 4250 20000 30000 使用寿命h L1L2L33-100020000效率η%L1 3-10. 97% 97% 97% 97% 97% 97% 97% 97%L2 9-100 94% 94% 94% 94% 94% 94% 94% 94%L364-100091% 91% 91% 91% 91% 91% 91% 91% 重量kgL1 3-10. 0.9 2.1 5.9 12.3 29.6 50 85 180L2 9-100 1.2 2.5 6.9 14.3 33.7 55 100 240L364-10001.52.9 9.2 1631 60 115 300噪音dB L1L2L33-1000≤58≤58≤65≤65≤70≤70≤75≤75使用温度℃L1L2L33-1000KBR系列精密行星减速机转动惯量:规格单位段数速比KBR40 KBR60 KBR90 KBR115 KBR142 KBR180 KBR220 KBR280 转动惯量kg.cm²L13/4/5. 0.03 0.18 0.75 2.85 12.4 15.3 34.8 44.97-10. 0.018 0.12 0.45 1.95 8.1 14.8 28.6 39.2L29-50 0.023 0.15 0.52 2.15 7.6 15.2 32.2 41.870-100 0.018 0.072 0.38 1.85 6.9 14.6 26.7 32.6L364-350 0.016 0.07 0.36 2.05 6.3 14.2 18.3 28.1400-10000.016 0.065 0.29 1.65 4.3 12.6 13.7 22.5配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)200W 70 4-M4 ф11(F7)35 ф50(H7) 5 64 91 110 129 400W 70 4-M4 ф14(F7)35 ф50(H7) 5 64 91 110 129配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)400W 70 4-M4 14F7 35 50(H7) 5 90 109 132 155 750W 90 4-M5 19F7 35 70(H7) 5 90 109 132 155 1000W 145 4-M8 22F7 65 110(H7) 5 130 109 132 155配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)750W 90 4-M6 19F7 55 70(H7) 10 130 141.2 173.2 195.2 1500W 145 4-M8 22/24F7 65 110(H7) 10 130 141.2 173.2 195.22000W 165 4-M10 32F7 65 130(H7) 10 150 141.2 173.2 195.2配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 180 226 268 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 180 226 268 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 192 180 226 268配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 206 235 280 4200W 215 4-M12 42F7 115 180H7 10 188 206 235 280 7500W 235 4-M12 55F7 120 200H7 10 220 206 235 280配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 258 287 332 4200W 215 4-M12 42F7 116 180H7 10 188 398 287 332 5500W 235 4-M12 55F7 116 200H7 10 220 398 287 332 7500W 265 4-M12 55F7 116 230H7 10 250 398 287 332配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 295 346 398 7500W 235 4-M12 55F7 116 200H7 10 220 295 346 398 11000W 265 4-M12 55F7 116 230H7 10 250 295 346 398 15000W 300 4-M12 60F7 140 250H7 10 285 295 346 398。
行星减速机主要传动结构及其特点与用途的介绍
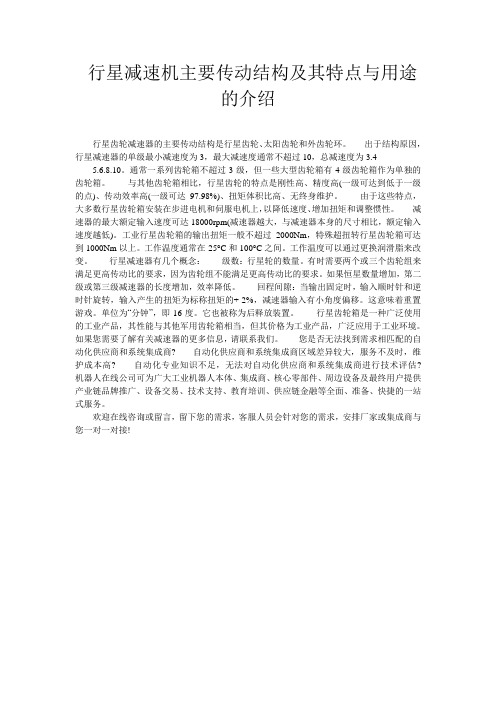
行星减速机主要传动结构及其特点与用途的介绍行星齿轮减速器的主要传动结构是行星齿轮、太阳齿轮和外齿轮环。
出于结构原因,行星减速器的单级最小减速度为3,最大减速度通常不超过10,总减速度为3.45.6.8.10。
通常一系列齿轮箱不超过3级,但一些大型齿轮箱有4级齿轮箱作为单独的齿轮箱。
与其他齿轮箱相比,行星齿轮的特点是刚性高、精度高(一级可达到低于一级的点)、传动效率高(一级可达97.98%)、扭矩体积比高、无终身维护。
由于这些特点,大多数行星齿轮箱安装在步进电机和伺服电机上,以降低速度、增加扭矩和调整惯性。
减速器的最大额定输入速度可达18000rpm(减速器越大,与减速器本身的尺寸相比,额定输入速度越低)。
工业行星齿轮箱的输出扭矩一般不超过2000Nm,特殊超扭转行星齿轮箱可达到1000Nm以上。
工作温度通常在-25°C和100°C之间。
工作温度可以通过更换润滑脂来改变。
行星减速器有几个概念:级数:行星轮的数量。
有时需要两个或三个齿轮组来满足更高传动比的要求,因为齿轮组不能满足更高传动比的要求。
如果恒星数量增加,第二级或第三级减速器的长度增加,效率降低。
回程间隙:当输出固定时,输入顺时针和逆时针旋转,输入产生的扭矩为标称扭矩的+-2%,减速器输入有小角度偏移。
这意味着重置游戏。
单位为“分钟”,即16度。
它也被称为后释放装置。
行星齿轮箱是一种广泛使用的工业产品,其性能与其他军用齿轮箱相当,但其价格为工业产品,广泛应用于工业环境。
如果您需要了解有关减速器的更多信息,请联系我们。
您是否无法找到需求相匹配的自动化供应商和系统集成商?自动化供应商和系统集成商区域差异较大,服务不及时,维护成本高?自动化专业知识不足,无法对自动化供应商和系统集成商进行技术评估?机器人在线公司可为广大工业机器人本体、集成商、核心零部件、周边设备及最终用户提供产业链品牌推广、设备交易、技术支持、教育培训、供应链金融等全面、准备、快捷的一站式服务。
电机上的减速机的作用
电机上的减速机的作用
嘿,朋友们!今天咱来唠唠电机上的减速机,这玩意儿可太重要啦!
你想想,电机那转起来速度多快呀,就像一阵风似的。
但有时候咱可不是就需要那么快的速度呀,这时候减速机就闪亮登场啦!减速机就像是一个神奇的调控大师,它能把电机那疯狂的速度给降下来,变得温顺、听话。
咱可以打个比方呀,电机就像是一匹脱缰的野马,力量强大但不好控制;而减速机呢,就是那根缰绳,能让这匹野马乖乖地按照我们的要求来行动。
没有减速机,那电机的速度可能就会失控,很多事情就没法好好干啦!
减速机的作用那可真是多了去了。
它能让电机的动力更加平稳地输出,就好比原本是波涛汹涌的水流,经过减速机的调节,就变成了缓缓流淌的小溪,多安稳呀!这样一来,那些需要精细操作的设备就能更好地工作了,不会因为速度太快而出错。
它还能增加扭矩呢!啥是扭矩?简单来说就是让设备更有力气。
就像你要推动一个很重的东西,减速机就帮你加把劲,让你能更轻松地推动它。
这多厉害呀!
而且哦,减速机还能延长设备的使用寿命呢!你想啊,如果电机一直高速运转,那得多损耗呀,就像人一直拼命跑,肯定累得不行。
但有了减速机,速度适中了,对设备的磨损也就减少了,设备就能用得更久啦!这不是给咱省钱嘛!
你说,减速机是不是超级重要?没有它,很多机器设备都没法好好工作啦!咱的生活中到处都有减速机的身影呢,从工厂里的大型机器到我们日常用的一些小电器,都离不开它。
它就像一个默默奉献的幕后英雄,虽然不显眼,但却起着至关重要的作用。
所以呀,可别小看了电机上的减速机,它可是有着大本事呢!它让我们的生活变得更便利、更高效。
下次再看到有电机在工作,你就想想它背后的减速机,是不是觉得特别神奇呀!。
伺服电机 下减速机的作用
伺服电机下减速机的作用一、伺服电机的概述伺服电机是一种能够精确控制位置、速度和加速度的电机。
它通过传感器实时反馈给控制器,以实现对电机的精确控制。
伺服电机具有高精度、高响应速度和高可靠性的特点,在工业自动化、机器人、数控加工等领域广泛应用。
二、减速机的作用减速机是一种能够减小电机输出速度、增大输出扭矩的装置。
其主要作用是通过降低电机的转速,提高输出扭矩,从而适应不同工况下的需求。
减速机能够使机械设备实现高速运动和高扭矩输出,提高设备的工作效率和运行稳定性。
三、伺服电机下减速机的作用伺服电机下减速机的作用是将伺服电机的高速低扭矩输出转换为低速高扭矩输出,以满足特定工况下的需求。
具体来说,伺服电机下减速机可以实现以下几个方面的功能:1. 提高输出扭矩:伺服电机的输出扭矩较小,无法满足某些高负载工况下的需求。
通过减速机的作用,可以将伺服电机的高速低扭矩输出转换为低速高扭矩输出,从而提高了输出扭矩。
2. 实现精确控制:伺服电机可以实现精确的位置、速度和加速度控制,而减速机可以将电机的高速输出转换为低速输出,使得控制更加精确。
这对于某些对速度要求较低、但对位置要求较高的应用场景非常重要。
3. 增加输出转矩惯量:减速机的作用是通过增加转矩的惯量,使得电机的输出能够更好地适应负载的变化。
这样可以提高系统的稳定性和响应速度。
4. 降低噪音和震动:伺服电机下减速机可以降低电机的转速,减少机械设备的震动和噪音。
这对于某些对噪音和振动要求较高的应用场景非常重要,如精密加工、医疗设备等。
5. 增加传动效率:减速机的结构设计合理,可以提高传动效率,减少能量损耗。
这对于一些对能源消耗要求较高的应用场景非常重要,如风力发电、太阳能发电等。
四、伺服电机下减速机的应用领域伺服电机下减速机广泛应用于各个领域,如机器人、自动化生产线、数控机床、印刷设备、包装设备等。
在这些领域中,伺服电机下减速机能够实现精确的位置控制、高速运动和高扭矩输出,提高设备的工作效率和稳定性,满足不同工况下的需求。
伺服电机用行星减速机
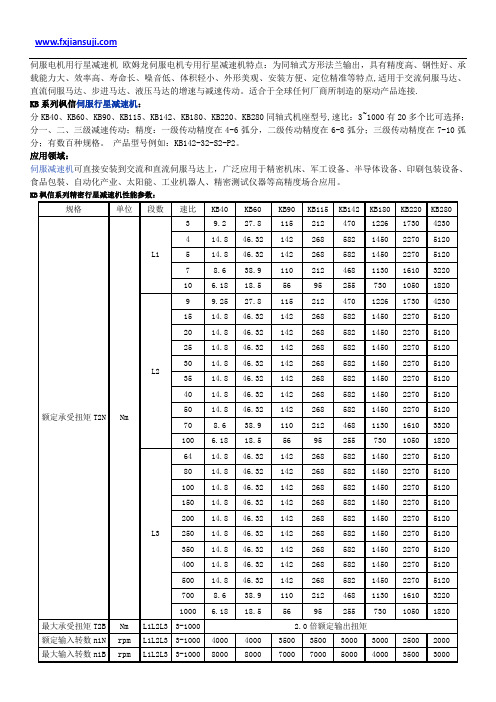
伺服电机用行星减速机欧姆龙伺服电机专用行星减速机特点:为同轴式方形法兰输出,具有精度高、钢性好、承载能力大、效率高、寿命长、噪音低、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
适合于全球任何厂商所制造的驱动产品连接.KB系列枫信伺服行星减速机:分KB40、KB60、KB90、KB115、KB142、KB180、KB220、KB280同轴式机座型号,速比:3~1000有20多个比可选择;分一、二、三级减速传动;精度:一级传动精度在4-6弧分,二级传动精度在6-8弧分;三级传动精度在7-10弧分;有数百种规格。
产品型号例如:KB142-32-S2-P2。
应用领域:伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于精密机床、军工设备、半导体设备、印刷包装设备、食品包裝、自动化产业、太阳能、工业机器人、精密测试仪器等高精度场合应用。
KB枫信系列精密行星减速机性能参数:精密背隙P1arcmin L1 3-10. ≤4≤4≤4≤4≤4≤4≤4≤4 L2 9-100 ≤6≤6≤6≤6≤6≤6≤6≤6 L3 64-1000 ≤7≤7≤7≤7≤7≤7≤7≤7标准背隙P2 L1 3-10. ≤6≤6≤6≤6≤6≤6≤6≤6 L2 9-100 ≤8≤8≤8≤8≤8≤8≤8≤8 L3 64-1000 ≤10≤10≤10≤10≤10≤10≤10≤10容许径向力F1 N L1L2L3 3-1000 780 850 2250 4700 6400 8500 40000 60000 容许轴向力F2 N L1L2L3 3-1000 390 450 1100 2350 3700 4250 20000 30000 使用寿命h L1L2L3 3-1000 20000效率η%L1 3-10. 97% 97% 97% 97% 97% 97% 97% 97% L2 9-100 94% 94% 94% 94% 94% 94% 94% 94% L3 64-1000 91% 91% 91% 91% 91% 91% 91% 91%重量kg L1 3-10. 0.5 1.4 4.2 9.2 20 34 48 90 L2 9-100 0.8 1.9 5.2 11.3 24.5 42 60 115 L3 64-1000 1.1 2.4 6.2 13.2 28 50 72 140噪音dB L1L2L3 3-1000 ≤58≤58≤65≤65≤70≤70≤75≤75使用温度℃L1L2L3 3-1000KB系列精密行星减速机转动惯量:规格单位段数速比KB40 KB60 KB90 KB115 KB142 KB180 KB220 KB280转动惯量kg.cm²L13/4/5. 0.03 0.18 0.75 2.85 12.4 15.3 34.8 44.9 7-10. 0.018 0.12 0.45 1.95 8.1 14.8 28.6 39.2 L29-50 0.023 0.15 0.52 2.15 7.6 15.2 32.2 41.8 70-100 0.018 0.072 0.38 1.85 6.9 14.6 26.7 32.6 L364-350 0.016 0.07 0.36 2.05 6.3 14.2 18.3 28.1 400-1000 0.016 0.065 0.29 1.65 4.3 12.6 13.7 22.5配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)200W 70 4-M4 ф11(F7)35 ф50(H7) 5 64 126 145 164400W 70 4-M4 ф14(F7)35 ф50(H7) 5 64 126 145 164配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)400W 70 4-M4 14F7 35 50(H7) 5 90 165 188 211 750W 90 4-M5 19F7 35 70(H7) 5 90 165 188 211 1000W 115 4-M8 19F7 55 95(H7) 5 130 185 208 231配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)750W 90 4-M6 19F7 55 70(H7) 10 130 203 235 259 1500W 145/130 4-M8 22/24F7 65 110(H7) 10 130 213 245 269 2000W 165 4-M10 32F7 65 130(H7) 10 150 233 265 389配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 150 280 326 372 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 180 305 351 397 4000W 215 4-M12 38/42(F7) 115 180(H7) 10 190 325 371 417配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 320 368 413 4200W 215 4-M12 38/42F7 115 180H7 10 188 340 388 433 7500W 235 4-M12 55F7 120 200H7 10 220 342 390 435配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 188 362 425 470 4200W 215 4-M12 38/42F7 116 180H7 10 188 362 425 470 7500W 235 4-M12 55F7 116 200H7 10 220 392 425 470 11000W 265 4-M12 55F7 116 230H7 10 250 392 425 470配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)4200W 215 4-M12 38/42F7 116 180H7 10 188 400 488 568 7500W 235 4-M12 55F7 116 200H7 10 220 400 488 568 11000W 265 4-M12 55F7 116 230H7 10 250 400 488 568 15000W 300 4-M12 60F7 140 250H7 10 285 430 520。
伺服电机减速机用途

伺服电机减速机用途伺服电机减速机用途伺服电机减速机是一种将高速低扭矩的电动机转换成低速高扭矩的装置,其主要作用是将电动机的输出转矩通过减速器传递给负载,以实现负载的精确控制和定位。
在工业自动化、机器人、数控加工等领域中广泛应用。
一、工业自动化领域1. 机床加工在数控加工中,伺服电机减速器可将高速低扭矩的电动机输出转换成低速高扭矩,使得数控系统可以实现高精度的定位和运动控制。
同时,它还可以提供稳定的运行性能和较长的使用寿命。
2. 自动化生产线在自动化生产线中,伺服电机减速器常被用于输送带、卷材设备等需要精确定位和控制运动的设备上。
通过与PLC或其他控制系统配合使用,可以实现对生产过程中各个环节进行精确控制和监测。
3. 包装设备在包装设备中,伺服电机减速器可用于各种需要精确定位和调整速度的设备上,如封口机、贴标机、装盒机等。
通过对电机输出转矩和速度进行精确控制,可以实现高效率的包装生产。
二、机器人领域1. 工业机器人在工业机器人中,伺服电机减速器可用于各种需要精确定位和控制运动的关节上。
通过对电机输出转矩和速度进行精确控制,可以实现工业机器人的高效率、高精度运动。
2. 服务型机器人在服务型机器人中,伺服电机减速器可用于各种需要精确定位和调整速度的设备上,如自动售货机、清洁车等。
通过对电机输出转矩和速度进行精确控制,可以实现服务型机器人的高效率、低噪音运行。
三、其他领域1. 医疗设备在医疗设备中,伺服电机减速器可用于各种需要精确定位和调整速度的设备上,如手术台、医用注射泵等。
通过对电机输出转矩和速度进行精确控制,可以实现医疗设备的高效率、低噪音运行。
2. 交通设备在交通设备中,伺服电机减速器可用于各种需要精确定位和调整速度的设备上,如电动汽车、高铁等。
通过对电机输出转矩和速度进行精确控制,可以实现交通设备的高效率、低噪音运行。
总结伺服电机减速器作为一种将高速低扭矩的电动机转换成低速高扭矩的装置,在工业自动化、机器人、数控加工等领域中有着广泛应用。
行星减速机计算
行星减速机计算
(原创实用版)
目录
1.行星减速机的定义和作用
2.行星减速机的减速比计算方法
3.如何根据需求选择行星减速机
4.行星减速机的优缺点
正文
一、行星减速机的定义和作用
行星减速机是一种广泛应用于工业领域的减速设备,其作用是通过降低电机的输出转速,提高输出扭矩,以满足各种工况的需求。
在工业生产中,行星减速机常被用于控制机械设备的转速、扭矩和运动方向。
二、行星减速机的减速比计算方法
行星减速机的减速比计算方法分为两种:定义计算方法和通用计算方法。
1.定义计算方法:减速比 = 输入转速 / 输出转速。
这是最简单的计算方法,只需要将连接的输入转速和输出转速相除即可得到减速比。
2.通用计算方法:减速比 = 使用扭矩 / 9550 * 电机功率 / 输入转数 * 使用系数。
这种方法需要知道电机的扭矩、功率、输入转数和使用系数,计算较为复杂,但更为精确。
三、如何根据需求选择行星减速机
在选择行星减速机时,需要考虑以下几个方面:
1.确定减速比:根据实际工况需求,计算出所需的减速比,然后选择符合要求的行星减速机。
2.考虑扭矩和功率:根据机械设备的工作负荷,选择合适的扭矩和功率的电机,以确保行星减速机能够稳定运行。
3.考虑使用寿命和效率:选择行星减速机时,应考虑其使用寿命和效率,以降低维修成本和提高生产效率。
四、行星减速机的优缺点
1.优点:行星减速机具有结构紧凑、传动比稳定、承载能力大、噪音低、使用寿命长等优点。
2.缺点:行星减速机的缺点是传动效率较低,且在高温和潮湿环境下易出现故障。
行星齿轮减速机的优点与缺点
⾏星齿轮减速机的优点与缺点
⾏星齿轮减速机常常⽤在具有低转速、⼤扭矩的传动设备之中,⼀般是把电动机等⾼速运转的动⼒通过⾏星齿轮减速机的输⼊轴上的齿数少的齿轮啮合输出轴上的⼤齿轮来达到减速的⽬的。
⽽⾏星齿轮减速机的特点主要体现在以下两点:
1、⾏星齿轮减速机在降速的同时会提⾼它的输出扭矩,扭矩输出⽐例按电机输出乘减速⽐,这⾥需要注意到⼀个细节,扭矩输出⽐不要超出⾏星齿轮减速机的额定扭矩。
2、⾏星齿轮减速机在降速的同时也会降低它的负载惯量,惯量的减少为减速⽐的平⽅。
⼀般来讲,电机都会有⼀个惯量数值的。
⾏星齿轮减速机在结构上的特点是紧凑,回程间隙⼩、精度较⾼,它的使⽤寿命很长,额定输出扭矩可以做的很⼤。
⾏星齿轮
⾏星减速机传动优点:
体积⼩、重量轻,承载能⼒⾼,使⽤寿命长、运转平稳,噪声低、输出扭矩⼤,速⽐⼤、效率⾼、性能安全的特点。
兼具功率分流、多齿啮合独⽤的特性。
⾏星减速机传动缺点:
材料优质、结构复杂、制造和安装较困难些。
但随着⼈们对⾏星传动技术进⼀步深⼊地了解和掌握以及对国外⾏星传动技术的引进和消化吸收,从⽽使其传动结构和均载⽅式都不断完善,同时⽣产⼯艺⽔平也不断提⾼。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服电机要配行星减速机使用的好处
伺服电机要配行星减速机使用的好处
现代工业设备随着伺服电机技术的发展被应用的越来越广泛,从高扭矩密度乃至于高功率密度,使转速的提升高过3000rpm,由于转速的提升,使得伺服电机的功率密度大幅提升。
这意味着伺服电机是否需要搭配减速机,那么问题就来了伺服电机行星减速机的应用场合都有那些?这样搭配的好处是什么?
1、重负何高精度:一般像是航空、卫星、医疗、军事科技、晶圆设备、机器人等自动化设备。
他们的共同特征在于将负载移动所需的扭矩往往远超过伺服电机本身的扭矩容量。
而透过减速机来做伺服电机输出扭矩的提升
2、提升扭矩:输出扭矩提升的方式,可能采用直接增大伺服电机的输出扭矩方式,但这种方式不但必须使用昂贵大功率的伺服电机,马达还要有更强壮的结构,扭矩的增大正比于控制电流的增大,此时采用比较大的驱动器,功率电子组件和相关机电设备规格的增大,又会使控制系统的成本大幅增加。
3、增加使用效率:理论上,提升伺服电机的功率也是输出扭矩提升的方式,可藉由增加伺服马达两倍的速度来使得伺服系统的功率密度提升两倍,而且不需要增加伺服驱动器等控制系统组件的规格,也就是不需要增加额外的成本。
而这就需透过的搭配来达到提升扭矩的目的了。
所以说,高功
率伺服电机的发展是必须搭配应用减速机,而非将其省略不用。
4、提高使用性能:据了解,负载惯量的不当匹配,是伺服控制不稳定的最大原因之一。
对于大的负载惯量,可以利用减速比的平方反比来调配最佳的等效负载惯量,以获得最佳的控制响应。
所以从这个角度来看,行星减速机为伺服应用的控制响应的最佳匹配。
5、增加设备使用寿命:行星减速机还可有效解决电机低速控制特性的衰减。
由于伺服电机的控制性会由于速度的降低,导致产生某程度上的衰减,尤其在对于低转速下的讯号撷取和电流控制的稳定性上,特别容易看出。
因此,采用减速机能使电机具有较高转速。
讲了这么多内容大家应该很清楚我们为什么在使用伺服电机要搭配行星减速机来工作了,这样不仅提高工作效率还可以降低成本。
上海枫信主要是从事机电传动产品的生产、销售、贸易为一体的综合性公司,公司自2004年创建以来,承蒙社会各界企业多年的鼎力支持,业务蒸蒸日上,18年专注伺服减速机、伺服电机减速机供应,提供行星伺服减速机、伺服蜗轮蜗杆减速机、伺服专用减速机批发.始终以“追求科技新动向,创造传动新领域!
KE系列精密行星减速机
特点:为圆形法兰盘输出方式,具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外形美观、安装方便、定位精准等特点,适用于交流伺服马达、直流伺服马达、步进马达、液压马达的增速与减速传动。
应用领域:
伺服减速机可直接安装到交流和直流伺服马达上,广泛应用于中等精度程度的工业领域。
如:精密机床、焊接设备、自动切割设备、包装设备、太阳能,工业机器人、印刷设备、精密测试仪器等自动化数控设备的应用。
性能和特点:
KE系列精密伺服行星减速机提供了高性价比,应用广泛、经济实用、寿命长等优点,在伺服控制的应用上,发挥了良好的伺服刚性效应,准确的定位控制,在运转平台上具备了中低背隙,高效率,高输入转速,高输入扭矩,运转平順,低噪音等特性,外观及结构设计轻小。
使用免更换的润滑油,及无论安装在何处,都可以免维修操作全封闭式设计,并且具有IP65的保护程度,因此工作环境差时亦可使用。
规格单位段数速比KE40 KE60 KE90 KE120 KE160 KE200
额定承受扭矩T2N Nm L1
4 12.2 42 112 210 58
5 1140
5 12.2 42 112 210 585 1140
7 6.6 33 92 168 378 850
10 4.8 15 54 85 310 630 L2
16 12.2 42 112 210 585 1140
20 12.2 42 112 210 585 1140
25 12.2 42 112 210 585 1140
35 12.2 42 112 210 585 1140
40 12.2 42 112 210 585 1140
50 12.2 42 112 210 585 1140 70 6.6 33 92 168 378 850 100 4.8 15 54 85 310 630
L3
64 12.2 42 112 210 585 1140 80 12.2 42 112 210 585 1140 100 12.2 42 112 210 585 1140 125 12.2 42 112 210 585 1140 140 12.2 42 112 210 585 1140 175 12.2 42 112 210 585 1140 245 12.2 42 112 210 585 1140 280 12.2 42 112 210 585 1140 350 12.2 42 112 210 585 1140 400 12.2 42 112 210 585 1140 500 12.2 42 112 210 585 1140 700 6.6 33 92 168 378 850 1000 4.8 15 54 85 310 630
最大承受扭矩T2B Nm L1L2L3 4-1000 2.0倍额定输出扭矩
额定输入转数n1N rpm L1L2L3 4-1000 4000 4000 4000 4000 3000 2500 最大输入转数n1N rpm L1L2L3 4-1000 6000 6000 6000 6000 5000 4000
精密背隙P1
arcmin L1 4-10. ≤5≤5≤5≤5≤5≤5 L2 16-100 ≤7≤7≤7≤7≤7≤7 L3 64-1000 ≤9≤9≤9≤9≤9≤9
标准背隙P2 L1 4-10. ≤10≤10≤10≤10≤10≤10 L2 16-100 ≤12≤12≤12≤12≤12≤12 L3 64-1000 ≤15≤15≤15≤15≤15≤15
容许径向力F1 N L1L2L3 4-1000 300 680 1750 3100 6550 12400 容许轴向力F2 N L1L2L3 4-1000 150 340 875 1550 3275 6200 使用寿命h L1L2L3 4-1000 20000
效率η%L1 4-10. 97% 97% 97% 97% 97% 97% L2 16-100 94% 94% 94% 94% 94% 94% L3 64-1000 91% 91% 91% 91% 91% 91%
重量kg L1 4-10. 0.6 1 3.1 7.4 22 42 L2 16-100 0.9 1.5 3.8 9.2 27.7 50 L3 64-1000 1.2 2 5 9.8 29 58
噪音dB L1L2L3 4-1000 ≤65≤65≤68≤68≤72≤72使用温度℃L1L2L3 4-1000
规格单位段数速比KE40 KE60 KE90 KE120 KE160 KE200
转动惯量J kg.cm²L1
4/5. 0.15 0.48 1.75 12.8 22.4 45.3
7-10. 0.15 0.42 1.45 11.4 18.6 44.8 L2 15-40 0.15 0.45 1.52 12.2 18.6 45.2
50-100 0.15 0.32 1.35 11.5 16.9 44.6
64-280 0.15 0.32 1.36 12.2 16.3 44.2
L3
350-1000 0.15 0.32 1.29 12.2 16.3 42.6
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)200W 70 4-M4 ф11F7 35 ф50(H7) 5 64 120 139 158
400W 70 4-M4 ф14F7 35 ф50(H7) 5 64 120 139 158
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)400W 70 4-M4 ф14F7 35 50(H7) 5 90 161.5 184.5 202.5 750W 90 4-M5 ф19F7 35 70(H7) 5 90 161.5 184.5 202.5
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)750W 90 4-M6 19F7 55 70(H7) 10 130 195 225 240 1500W 145 4-M8 22/24F7 65 110(H7) 10 130 205 235 250 3000W 165 4-M10 32F7 65 130(H7) 10 150 215 245 360
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)2000W 145 4-M8 22(F7) 65 110(H7) 10 176 301.5 347.5 385.5 3000W 200 4-M12 35(F7) 80 114.3(H7) 10 176 317.5 357.5 395.5 4200W 215 4-M12 42(F7) 115 180(H7) 10 190 352.5 392.5 430.5
配备电机LA LZ S LR LB LE LC L1(一级传动)L2(二级传动)L3(三级传动)3000W 200 4-M12 35F7 82 114.3H7 10 200 317 364 410 4200W 215 4-M12 42F7 115 180H7 10 200 317 384 410 7500W 235 4-M12 55F7 120 200H7 10 220 347 424 440。