安许茨20型陀螺罗经1
航海仪器-第1节 陀螺罗经1

T=0 T=6h
T=12h
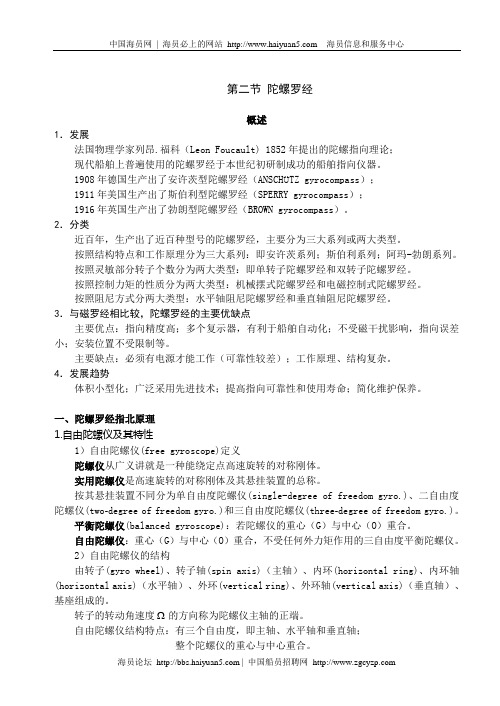
地球自转角速度的分解
Z。 We S E 以 北 纬 点 为 例 (We:地球自转角速度 We
•We分解为: W1=Wecosφ(水平分量) W2=Wesinφ (垂直分量)
φ :地理纬度)
W2 φ W O W1
φ
N
PN
•W1:在北纬使水平面 SENW的东半平面不断 下沉,西半平面不断上 升。(南纬相同) •W2:在北纬使子午面S Z。N的N点不断向W移 动。(南纬反之)
2、陀螺仪的特性
1)陀螺仪的定轴性(也称稳定性) 不受外力矩作用时,陀螺仪的主轴保持 其空间的初始方向不变。
定轴性实验录像
2、陀螺仪的特性
1.陀螺仪的定轴性(也称稳定性)
实验一:自由陀螺仪转子不转,转动陀螺仪基 座,主轴随基座一起转动。 实验二:自由陀螺仪转子高速旋转,转动陀螺 仪基座,主轴不随基座一起转动。 自由陀螺仪表现为定轴性的条件是:陀螺转子 高速旋转;陀螺仪不受外力矩作用。
1.人坐车前进时感觉到路两旁的树在不 断地向后运动,为什么? 2.地球的运动规律?地球上的人看到 太阳东升西落,是太阳的运动吗? 3.将陀螺仪的主轴初始指向地球上 某一方位,人会看到它的指向始终 不变吗?
自由陀螺仪在地球上的视运动
北半球,若将自由陀螺仪 放在A点,使其主轴位于 子午面内并指恒星S,由 于地球自西向东转,经 过一段时间后,它转到B 点,因定轴性,陀螺仪 主轴仍将指恒星S方向但 相对子午面来说,主轴 指北端已向东偏过了α 角。 北纬看自由陀螺仪视运动
三、发展历史
两千多年前,我国劳动人民在生活和生产实践中发现了陀螺 的基本特性。 1852年,法国科学家福科第一个利用陀螺特性并与地球自转 相联系,它利用三自由度陀螺仪的定轴性来观测地球自转; 并提出了创见性的理论。 1878年,美国科学家霍布金发明了用电机推动的陀螺罗经。 1908年,德国人安许茨创造了世界上第一台实用陀螺罗经。 成为一个罗经系列。陀螺罗经也由此开始出现。 1909年,美国人斯伯利也创造了单转子弹性支承的陀螺罗经, 并且也逐步发展成为一个罗经系列。 二十世纪五十年代,一个新的罗经系列逐渐形成,即美英两 国合作生产的阿玛勃朗型——电磁控制式陀螺罗经。
安许茨系列陀螺罗经资料课件

THANKS
罗经分类
按照用途可分为航向罗经、方位罗经等。
指向原理
罗经中的陀螺仪始终保持稳定的指向,通过测量陀螺仪的指向变化可以确定载体的方向或角度。 当载体发生方向改变时,罗经中的陀螺仪会产生一个与方向改变成正比的信号,通过处理这个信
号可以确定载体的新方向。
陀螺罗经优势
高精度
陀螺罗经利用陀螺仪的稳定性来 测量方向或角度,具有高精度和
掌握使用陀螺罗经时的注意事项和操作规范 ,确保其准确性和可靠性。
新型陀螺罗经技术展望
光纤陀螺罗经技术
介绍光纤陀螺罗经的原理、优点 和应用前景,展望其在航海领域 的发展趋势。
微机械陀螺罗经技
术
探讨微机械陀螺罗经的工作原理 、特点和发展趋势,预测其在未 来航海领域的应用前景。
智能化陀螺罗经系
统
研究智能化陀螺罗经系统的原理 、功能和优势,展望其在提高航 海安全和效率方面的作用。
化学清洁剂。
润滑处理
定期对陀螺罗经活动部 件进行润滑处理,确保 其转动灵活、无卡滞现
象。
常见故障排除方法
1 2 3
无法启动
检查电源连接是否可靠、开关是否处于正确位置 ,如仍无法启动请联系专业技术人员。
工作异常
密切关注陀螺罗经工作状态,如出现异常现象( 如指针抖动、偏差过大等),立即停机检查,必 要时请联系专业技术人员。
将主机安装在底座上,并连接好 相关电缆和接口。
安装传感器
根据实际需要,安装相应的传感 器,如航向传感器、姿态传感器
等。
注意事项
在安装过程中,要避免对设备造 成损坏或影响其性能,如避免过 度拧紧螺丝、避免拉扯电缆等。
调试过程与技巧分享
设备初始化
航海仪器新题 已修改

二.雷达与ARPA1.【单选】下列说法中,——是正确的。
2.雷达误差在安装是已经矫掉,测量数据可直接使用3.虽然在安装时已经矫正过误差,但是还存在由图像扩展等因素引起的误差,也应修正。
4.雷达用的超高频买冲波,所以测量精度很高,不会有误差5.以上说法都对6.【单选】在ARPA中的一个主要参数TCPA用来表示——。
7.会遇距离8.会遇时间9.本船到最近会遇点的距离10.目标到最近会遇点的时间11.【单选】习惯上常将DCPA简称CPA,它表示预测目标到最接近本船的——12.时间13.距离14.位置15.方向16.【单选】人工标绘的前提条件是,在标绘期间——17.目标保速保向,本船保速18.目标保速保向,本船保向19.目标和本船都需保速保向20.目标和本船都不需保速保向21.【单选】ARPA的PPI之所以能实现高亮度显示是因为——22.加快径向扫描速率23.加快天线旋转速度24.采用非实时扫描方式25.提高了雷达的分辨力26.【单选】本船陀螺罗经有故障时,则——27.ARPA不能启动28.RADAR不能使用29.ARPA和RADAR均可照常使用30.ARPA的功能不执行31.【单选】本船计程仪有故障时,则——32.ARPA照常可使用33.RADAR不能使用34.RADAR照常可使用,但ARPA不能使用35.RADAR和ARPA都不能使用36.【单选】雷达向ARPA提供的基本信息是37.回波原始视频信号,触发脉冲、雷达天线角位置信号及船首线信号38.目标的位置信息,航向信息,速度信息39.目标的方位信息吗,目标距离信息,船首线信息40.触发脉冲信息,天线位置信息,航程信息41.【单选】在ARPA的PPI综合显示器上,每一被跟踪的目标将出现一根矢且,矢量的长度表示在设定的矢量时间内______42.目标的运行方向 B.目标的运动距离 C目标的运动速度 D 目标的运动数据43.【单选】当将模拟天线角位置信号变成数字信号时若要求最低位代表0.0880,那么,需用_____位二进制数字。
49航海学试题
49航海学试题中华人民共和国海事局(总第49期)科目:航海学试卷代号:913.适用对象:无限航区3000总吨及以上船舶二/三副(本试卷卷面总分100分,及格分为70分,考试时间100分钟)1.某船有45°S,12°W起航,航行进入东半球,航程不超过1500海里,则该船经差:A、西B、东C、东、西均可D、无法判断2.某轮船速12kn,逆风逆流航行,流速1kn,风使船减速1kn,0600计程仪读数为120′.0,计程仪改正率△L=+3%,则1h后相对计程仪读数为()。
A、130′.7B、128′.7C、129′.7D、131′.73.某轮由赤道向南航行,无航行误差,计程仪改正率0.0%,则1h后推算船位位于实际船位的()。
A、同一点B、南面C、北方不一定4.()波段的雷达可以激发和接受搜救雷达应答器的信号。
A、S波段B、X波段C、C波段D、以上都可以5.陀螺求高度正常时,陀螺球上赤道线应高于随动球有机玻璃上水平线()。
A、8~10毫米B、1~3厘米C、1~3毫米D、4~6毫米6.船舶再狭水道航行时,在雷达荧光屏上常常能观测到的假回波是()。
A、间接反射回波B、多次反射回波C、二次扫描回波D、A+B7.在天测罗经差中,当被测天体的高度一定时,罗经面的倾斜角越,观测天体罗经方位的误差越。
A 大/小B 小/大C小/小D.以上均错8.陀螺差主要随下列哪些因素而变化?A、航向和时间B、航向和航速C、航向和纬度D、航速和纬度9.中版海图水深浅于21m,水上注记注至。
A、0.5mB、整米C、0.1mD、1cm10.电磁计程仪的传感器所输出的电信号与船舶相对于谁的速度成。
A、对数关系B、指数关系C、正比关系D、反比关系11.航迹绘算法是根据什么资料在海图上作图,画出推算航迹和定位的?A、航向、航程和资料B、航向、方位和风流资料C、方位、航程和气象资料D、航向、航程和风流资料12、罗经点方向S/E换算成圆周方向为:A、101°.25B、123°.75C、146°25D、168°7513、海图图廓注记通常包括下列哪些内容?Ⅰ、图名;Ⅱ、图号;Ⅲ、图幅;Ⅳ、小改正;Ⅴ、出版和发行情况;Ⅵ、重要注意和警告;Ⅶ、坐标系说明A、Ⅱ~ⅤB、Ⅲ~ⅥC、Ⅰ~Ⅳ D 、Ⅳ~Ⅶ14、对地航程是_。
第1章 第4.4 节 安许茨20型罗经使用与保养(雨课堂题目)
第一次ED1 第二次ED2 第三次ED3 第四次ED4
航向显示被取消 自动重新起动尝试
四次起动失败
显示 故障 字符
罗经 系统 关闭
故障 字符 储存
4、切断陀螺罗经随动系统(因测试或修理需要)
切断: 步调开关B11中的开关G置于OFF 重新接通: 步调开关B11中的开关G重新置于ON
故障字符所表示的含义如下: E1: 陀螺罗经供电故障 E2: 陀螺电源故障 E3: 编码器故障 E4: 陀螺电流偏离正常值范围 E5: 随动系统故障 E6: 温度传感器故障 E7: 陀螺球高度偏离正常值范围 E8: 加热器统故障
• 功能附加型(Standard 20 Plus)
返回
返回
返回
固定部分
• 条形散热片 • 数字监视器
蒸馏水注入
锥体查看
支承液体
三、维护与保养
2、更换陀螺球 • 步骤同上
3、更换电子传感器的印制电路板 • 参见技术手册
注意
4、编码器零位调整(参考航向输入)
• 罗经安装后,必须调整编码器零位 • 罗经起动5h后在码头上进行
调整
• 首先准确确定船首的真方位 • 将步调开关B11中的开关A置于OFF,
E9: 支承液体温度>70ºC
三、维护与保养
1、更换支承液体和密封圈 • 规定每三年更换一次 • 关闭罗经,约等30min,方可进行 • 230cm3蒸馏水(红色标签) 从红螺钉孔注入储藏室 • 840cm3支承液体(绿色标签) 从绿色螺钉孔注入 • 顶部测量锥体查看支承液体已注满
三、维护与保养
• 按键B14(电子传感器印制电路板上)
• 按一次B14,航向消失
• 再按,显示警告字符
安许茨系列陀螺罗经资料
随动系统
作用:消除支撑液体对陀螺球产生的摩擦力矩;跟踪 陀螺球航向,在方位刻度盘上指示航向 工作框图:
• 信号电桥的工作原理
30
L1 L2
31 28
R1
R2 29
L2
L1
30 31
28
R2
R1
29
若L1=L2=X,则: 〖电桥等效电路〗
U 3 031(R U 12 82 j9 X j( )R ( R 12 R2 j)X )
双转子:OX轴 上托线圈和支承液体使陀螺球悬浮: OY与OZ 轴 (2)控制设备 (3)阻尼设备 (4)误差校正设备 5.支承方式:液浮+电磁力定中心
二.随动部分
核心为随动球,由上下两个铝质半球等组 成。它与陀螺球上下间隙4,8mm,左右 间隙2或4mm,即陀螺球呈中性悬浮。 1.结构组成:随动球 蜘蛛架 中心枢轴 导电环,方位齿轮和罗经方位刻度盘 2.作用:支承灵敏部分;传送航向;向 陀螺球供电
随动球 蜘蛛架 中心枢轴 导电环
方位齿轮和罗经方位刻度盘
三.固定部分
1.罗经桌
2.贮液缸:紫青铜制成,内履绝缘橡胶
(1)内盛支承液体( 配方、比例等)
蒸馏水:10升 甘油(20 ℃时比重为 1.23g/cm3 ): 1升 安息香酸:10克(或用硼 沙和福尔马林替代)
(2)观察窗:读航向、球高
(3)缸外壁上有加热器(电阻丝):保证支承液 体温度不低于49℃
温控系统
使支承液体的工作温度保持在正常范围(52°±3℃) 内。 主要组成:加热器、电风扇、蜂鸣器、乙醚管和微动开 关
使用与保养
使用: 使用注意事项 定期检查项目 保养项目
使用:
正常情况下,在启航前4~6小时启动罗经;如停泊 后关闭罗经,且船舶航向未改变过,可在开航前2 -3小时启动 。 1.起动前的检查 2.起动罗罗经桌、平衡环系统、罗经箱。
第1章 第3节 陀螺罗经结构与电路(雨课堂题目)
A.随动球: (out-sphere)
返回
B.中心导杆和蜘蛛架: (net of outer sphere and spider legs)
电刷 中心导杆
蜘蛛架
返回
三相电流走向:
❖汇电环— ❖中心导杆— ❖导电螺钉— ❖随动球电极— ❖支撑液体— ❖陀螺球电极
返回
汇电环
上半球 导电螺钉
下半球
第三节 陀螺罗经结构与电路
3.1安许茨系列陀螺罗经
CAPT.L
3.1安许茨系列陀螺罗经
3.1.1 概 述 一 、 安许茨系列典型产品
安许茨系列:(ANSCHUTZ-德国) 标准IV、4、6、14、20、22型
普拉特:(PLATH-德国) 北辰(日本) 航海I型(中国)
PLATH-C型
CMZ-300、CMZ-500、 CMZ-700型
返回
返回
返回
单选题 1分
1、罗经的组成设备主要有____。
A 主罗经和分罗经 B 电源设备 C 航向记录器和报警设备 D A+B+C
提交
单选题 1分
2、安许茨4 型陀螺罗经支承陀螺球是采用____ 方式。
A 液浮 B 液浮和导向轴承 C 液浮和电磁上托线圈 D 液浮和扭丝支承
提交
第三节 陀螺罗经结构与电路
垂直轴阻尼 力矩
v1
贮液缸南北轴 陀螺球主轴
M‘
v1 u2
v2
v2 u3
四、传向系统: (直流步进式)
•组成:步进发送器、开关电路和步进接收器 。
齿轮传动
方位 随动电机
步进 发送器
开关电路
步进接收器 (分罗经)
•步进精度:1/6度。
安许茨罗经1

二、电路系统
安许茨标准20型陀螺罗经的电路分为: 电源电路 随动系统 温控系统 信号检测系统。 电路系统除电源系统外,各种功能的实现都是由不同的传感 器检测输出不同的信号,由主控制器进行处理来实现。
1.电源系统 安许茨标准20型陀螺罗经的电源系统主要由: 直流稳压电路; 55V400Hz逆变器组成。
紧凑型配置:
组合型配置:
主要技术指标:
1.精度(accuracies)
稳定点误差(settle point error)
静态误差(static error) 动态误差(dynamic error)
≤±0.1°×secφ
≤±0.1°×secφ ≤±0ime)(精度在±0.2°之内)
由:随动传感器、放大器、AC/DC变换器、CPU、随动电机控制器和随动步 进电机等组成。
随动传感器是基于惠斯通电桥原理工作的信号电桥。 随动球上的随动电极和陀螺球上的赤道电极间的液体电阻R1,R2,组成信 号电桥的活动臂,对称变压器M1的初级绕组组成信号电桥的固定臂,电源由 55V400Hz陀螺电源供給。 当随动球与陀螺球在方位上出现偏 角时,两液体电阻R1和R2即出现差值, 信号电桥失去平衡,对称变压器次级 便输出与之对应的交流随动电压信号。 信号放大后变换成直流电压信号, 信号的大小约为0.5VDC/度。直流电 压输入到CPU的模/数转换端。 CPU把输入模拟信号变换成8位数字 信号,输至随动电机控制器。 随动电机控制器把数字信号变换成模拟控制信号,输出到随动步进电机的 两个绕组,随动电机转动,通过皮带带动方位齿轮,使整个随动部分转动, 直至随动球与陀螺球在方位上对准,随动信号消失,随动电机便停止转动。
3h
70°/s 150°/s 9600 baud 24VDC
航海仪器考证习题集1

《航海仪器》习题集第一章陀螺罗经1、安许茨4型罗经,在纬度20°处起动时达稳定指北需3h,若起动状态一样,则在纬度60°处达稳定指北的时间 B 。
A.仍为3h B.大于3h C.小于3h D.A、B、C皆可能2、在北纬静止基座上,下重式罗经主轴指北端的稳定位置是 A 。
A.子午面内水平面之上 B.子午面内水平面之下 C.子午面之东水平面之上 D.子午面之西水平面之下3、把自由陀螺仪改造为陀螺罗经,关键是要 B 。
A.克服地球自转 B.克服地球自转角速度垂直分量所引起的主轴视运动C.克服地球自转角速度水平分量所引起的主轴视运动 D.克服陀螺仪的定轴性4、一个自由陀螺仪要成为实用的陀螺罗经,必须对其施加 D 。
A.进动力矩和稳定力矩 B.控制力矩和稳定力矩 C.进动力矩和阻尼力矩 D.控制力矩和阻尼力矩5、液体连通器式陀螺罗经在起动过程中,当主轴指北端向水平面靠拢时,阻尼力矩起到 A 的作用。
A.增进其靠拢 B.阻止其靠拢 C.不起作用 D.以上都不对6、下列何种陀螺罗经采用西边加重物的垂直轴阻尼法 B 。
A.安许茨4型罗经 B.斯伯利37型罗经 C.航海1型罗经 D.阿玛一勃朗10型罗经7、在北纬,船用陀螺罗经在稳定位置时,为什么其主轴要在水平面之上有一高度角,主要用于产生A 。
A.控制力矩 B.阻尼力矩 C.动量矩 D.以上均错8、当陀螺罗经结构参数一定时,罗经等幅摆动的周期为84.4min所对应的纬度被称为 B 。
A.标准纬度 B.设计纬度 C.20° D.固定纬度9、高速旋转的三自由度陀螺仪其进动性可描述为 C 。
A.在外力的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力方向 B.在外力矩的作用下,陀螺仪主轴的动量矩矢端力图保持其初始方位不变 C.在外力矩的作用下,陀螺仪主轴的动量矩矢端将以捷径趋向外力矩 D.在外力矩的作用下,陀螺仪主轴即能自动找北指北10、舒拉条件是指当陀螺罗经的等幅摆动周期为 C ,陀螺罗经不存在第一类冲击误差。
陀螺罗经的结构

2.球内部件: (点击可看图 球内部件: 点击可看图 球内部件 点击可看图)
•陀螺马达 陀螺马达 •灯型支架 灯型支架 •液体阻尼器 液体阻尼器 •电磁上托线圈 电磁上托线圈
返回
三、随动部分: 随动部分:
1.组成: 组成: 组成 随动球、中心导杆、蜘蛛架、 随动球、中心导杆、蜘蛛架、 汇电环、方位齿轮和方位刻度盘。 汇电环、方位齿轮和方位刻度盘。 2.作用: 作用: 作用 跟踪陀螺球航向, 跟踪陀螺球航向,在刻度盘上指 示航向,并给陀螺球供电 陀螺球供电。 示航向,并给陀 尼 器
返回
电 磁 上 托 线 圈
返回
陀 螺 球
返回
•
灯 型 支 架
返回
•
电刷 中心导杆 蜘蛛架
返回
返回
返回
返回
返回
返回
返回
返回
A.随动球:(out-sphere) 随动球: 随动球
返回
B.中心导杆和蜘蛛架: (net of outer 中心导杆和蜘蛛架: 中心导杆和蜘蛛架 sphere and spider legs) )
电刷 中心导杆 蜘蛛架
返回
•三相电流走向: 三相电流走向: 三相电流走向 汇电环— 中心导杆— 导电螺钉— 随动球电 极— 支撑液体— 陀螺球电极
在船上为了消除附加的干扰力矩对灵敏部分的影响, 在船上为了消除附加的干扰力矩对灵敏部分的影响, 在主罗经的结构中增设了随动部分, 在主罗经的结构中增设了随动部分,借助于随动系 统使其跟踪灵敏部分运动,带动航向刻庋盘上的0° 统使其跟踪灵敏部分运动,带动航向刻庋盘上的 ° 到180°的刻度线与陀螺球主轴南北线始终保持一致; °的刻度线与陀螺球主轴南北线始终保持一致; 并把灵敏部分支承在固定部分上。 并把灵敏部分支承在固定部分上。
陀螺罗经

陀螺罗经1.安许茨系列陀螺罗经开机前的检查与准备。
(10分)(口述+实操)2.读取安许茨系列陀螺罗经航向。
(10分)(实操)1.安许茨系列陀螺罗经开机步骤。
(10分)(口述+实操)2.读取安许茨系列陀螺罗经航向。
(10分)(实操)1.安许茨系列陀螺罗经关机步骤。
(10分)(口述+实操)2.读取安许茨系列陀螺罗经航向。
(10分)(实操)1.安许茨系列陀螺罗经主要开关控钮的作用。
(10分)(口述)罗经电源主开关;随动开关2.读取安许茨系列陀螺罗经航向。
(10分)(实操)1.斯伯利系列陀螺罗经开机前的检查与准备。
(10分)(口述+实操)2.读取斯伯利系列陀螺罗经航向。
(10分)(实操)1.斯伯利系列陀螺罗经开机步骤。
(10分)(口述+实操)2.读取斯伯利系列陀螺罗经航向。
(10分)(实操)1.斯伯利系列陀螺罗经关机步骤。
(10分)(口述+实操)2.读取斯伯利系列陀螺罗经航向。
(10分)(实操)1.斯伯利系列陀螺罗经主要开关控钮的作用。
(10分)(口述)罗经电源主开关;方式转换开关;旋转控钮与开关;补偿器;2.读取斯伯利系列陀螺罗经航向。
(10分)(实操)1.阿玛-勃朗系列陀螺罗经开机前的检查与准备。
(10分)(口述+实操) 2.读取阿玛-勃朗系列陀螺罗经航向。
(10分)(实操)1.阿玛-勃朗系列陀螺罗经开机步骤。
(10分)(口述+实操)2.读取阿玛-勃朗系列陀螺罗经航向。
(10分)(实操)1.阿玛-勃朗系列陀螺罗经关机步骤。
(10分)(口述+实操)2.读取阿玛-勃朗系列陀螺罗经航向。
(10分)(实操)1.阿玛-勃朗系列陀螺罗经主要开关控钮的作用。
(10分)(口述)罗经电源主开关;方位(AZIMUTH)按钮;倾斜(TILT)按钮;补偿器2.读取阿玛-勃朗系列陀螺罗经航向。
(10分)(实操)。
航海仪器 安许茨系列陀螺罗经

分
统统
浙江省精品课程 宁波大学海运学院
信号 指示 系统
5
安许茨标准4型陀螺罗经包括:
主罗经、电源起动箱、变流机、分罗经接线箱、分罗经、 警报器、航向记录器等。
2011921
浙江省精品课程 宁波大学海运学院
6
§3-2 主罗经的结构
(以安许茨4型为例)
构成: 罗经箱 n 灵敏部分 n 随动部分 n 固定部分
第三节 安许茨系列陀螺罗经
2011921
浙江省精品课程 宁波大学海运学院
1
主要内容:
n §3-1 n §3-2 n §3-3 n §3-4
概述 主罗经的结构 附属设备 罗经的使用、保养
2011921
浙江省精品课程 宁波大学海运学院
2
§3-1 概述
n 一、安许茨系列陀螺罗经的主要特点:
n 1.陀螺仪(灵敏部分)
位置:绕成圆环形,固定在陀 螺球内的底部,其平面与陀螺 球的赤道平面平行。
供电:由陀螺球内三相交流电 的第一相和第二相供电。
排斥力:通电后在陀螺球与随 动球之间产生一个排斥力,方 向指向球心。
水平分力:使陀螺球在赤道平面内相对随动球保持中心位置。 垂直分力:使陀螺球悬在随动球中间略偏高的位置上。
2011921
n ——陀螺球 双转子(消除摇摆误差)
n 2.控制力矩的产生
n ——陀螺仪的重心下移(下重式)
n 3.阻尼力矩的产生
n ——采用油液阻尼器,产生水平轴阻尼
n 4.灵敏部分支承方式
n ——用支承液体支承(液浮),电磁上托线圈定中心
n 5.随从信号的获得
n ——用电桥电路产生随从信号
2011921
安许茨罗经资料

二、电路系统
安许茨标准20型陀螺罗经的电路分为: 电源电路 随动系统 温控系统 信号检测系统。 电路系统除电源系统外,各种功能的实现都是由不同的传感 器检测输出不同的信号,由主控制器进行处理来实现。
1.电源系统 安许茨标准20型陀螺罗经的电源系统主要由: 直流稳压电路; 55V400Hz逆变器组成。
3.随动速度(rate of follow-up) 4.随动加速度(accelerate of follow-up) 5.航向信息输出(heading signal output) 6.供电电压(supply voltage) 7.功率消耗(power consumption) 主罗经启动 主罗经正常运转时 加热器 风扇
紧凑型配置:
组合型配置:
主要技术指标:
1.精度(accuracies)
稳定点误差(settle point error)
静态误差(static error) 动态误差(dynamic error)
≤±0.1°×secφ
≤±0.1°×secφ ≤±0.4°×secφ
2.稳定时间(setting time)(精度在±0.2°之内)
中国的航海一I、II型陀螺罗经和 日本的北辰陀螺罗经等。
安许茨系列陀螺罗经属机械摆式罗经,其显著特点是: • 灵敏部分是一个双转子陀螺球, • 借助于液体的浮力和辅助支承力使其在支承液体中呈自由 悬浮状态。(液浮加上托线圈) • 采用降低球的重心的方法获得控制力矩(下重式, • 液体阻尼器产生阻尼力矩。 安许茨标准Ⅳ和4型陀螺罗经是40年代或50年代的产品,较 长时间内在船舶上得到广泛的应用。 安许茨标准20和22型陀螺罗经是90年代的最新产品,已装 备于船舶上使用。由于该产品的技术性能优越,适用范围较广 等优点,受到了安许茨产品用户的欢迎。
航海学讲义之电罗经
(1)定轴性(gyroscopic intertia)
比对实验说明
定轴性:高速旋转的自由陀螺仪,当不受外力矩作用时,其主轴将保持它在空间的初始方向不变。
定轴性条件:陀螺转子高速旋转;陀螺仪不受外力矩作用。
定轴性表现特征:主轴指向空间初始方向不变。
(2)进动性(gyroscopic precession)
理想自由摆动周期所对应的纬度称为陀螺罗经的设计纬度(chosen latitude)(0),设计纬度是设计罗经时所选取的一特殊纬度。例如安许茨4型罗经的设计纬度为60°。
4.使陀螺罗经稳定指北
1)使陀螺罗经稳定指北的措施
阻尼力矩(damping moment):为了使陀螺罗经稳定指北而对陀螺仪施加的力矩。
阻尼设备(damper))(阻尼器):陀螺罗经产生阻尼力矩的设备(器件)。
阻尼方式(damping mode):陀螺罗经将阻尼力矩施加在陀螺仪(球)的哪一轴上
陀螺罗经的阻尼方式:水平轴阻尼方式(damping mode of horizotal axis)和垂直轴阻尼方式(damping dode of vertical axis)。
My=mgsin·a
≈mg a·
=M·
M=mga最大控制力矩
控制力矩的大小与罗经结构参数和主轴高度角有关
控制力矩M使主轴产生进动速度u2,它使主轴正端自动找北(向子午面进动)。
根据赖柴尔定理:动量矩H矢端的线速度矢量与外力矩矢量M大小相等方向相同:
=M
陀螺罗经控制力矩M使罗经主轴产生的进动速度:
2=M=M·
自由陀螺仪进动特性口诀:
陀螺仪表定向好,
进动特性最重要,
要问进动何处去?
安许茨系列陀螺罗经资料课件

06
安许茨系列陀螺罗经的发展趋势 与展望
技术创新与进步
陀螺仪技术优化
随着材料科学和微电子技术的进 步,陀螺仪的尺寸不断减小,精
度和稳定性得到提高。
智能化技术应用
人工智能和机器学习技术在陀螺 罗经中得到应用,实现自适应滤
波、故障诊断等功能。
集成化与模块化
将多个传感器集成到一个模块中, 实现多功能一体化,降低系统复 杂性和成本。
检查罗ቤተ መጻሕፍቲ ባይዱ完整性
在安装前,仔细检查陀螺罗经 的外观,确保没有损坏或缺陷。
安装底座
根据产品手册,正确安装罗经 的底座,确保稳定性和水平度。
连接电缆与电源
按照说明手册连接必要的电缆 和电源线,确保连接牢固。
调试方法
初步校准
在安装完成后,进行初 步的校准,确保罗经的
基本功能正常。
精度测试
误差修正
维护与保养
陀螺仪部分的主要功能是测量和 保持航向,提供稳定的基准信号
给控制系统。
控制系 统
控制系统是安许茨系列陀螺罗经的指 挥中心,负责接收陀螺仪的信号,计 算出航向变化,并驱动电机调整罗经 的指向。
控制系统的主要功能是根据陀螺仪的 信号计算出航向变化,并驱动电机调 整罗经的指向,以保持航向的准确性。
它由微处理器、控制电路、驱动电路 和执行机构组成。
显示部分
显示部分是安许茨系列陀螺罗经的人机交互界面,负责将航向信息以直观的方式呈 现给操作者。
它由显示屏、显示驱动电路和显示模块组成。
显示部分的主要功能是将航向信息以数字或模拟方式显示出来,便于操作者观察和 操作。
其他组件
安许茨系列陀螺罗经还包括电源、 通信接口、外壳等其他组件。
电源负责提供稳定的能源给整个 罗经系统;通信接口用于与其他 设备进行数据交换;外壳起到保
第十章 航海仪器练习题

38. 因采用控制力矩的方式不同,安许茨型罗经动量矩指向________,而液体连通器式罗 经动量矩指向________。 A.北,北 B.南,南 C.北,南 D.南,北 39. 据《海船航行设备规范》的要求,陀螺罗经自起动至稳定的时间不应大于________小 时。 A.3 B.6 C.1.5 D.8 40. 位于南纬某处静止基座上的斯伯利37型罗经,其主轴的稳定位置为________。 A.子午面之东,水平面之上 B.子午面之东,水平面之下 C.子午面之西,水平面之上 D.子午面之西,水平面之下 41. 位于北纬某处静止基座上的斯伯利 37 型罗经,其主轴的稳定位置为________。 A. 子午面之东,水平面之上 B. 子午面之东,水平面之下 C. 子午面之西,水平面之上 D. 子午面之西,水平面之下 参考答案 1-5 CCACA 6-10 DCBAC 11-15 CBCCA 16-20 CBCCA 21-25 BADAB 26-30 DABAB 31-35 ACBCD 36-40 ADCBD 41 A 考试大纲要求 10.1.2 陀螺罗经误差及其修正 10.1.2.1 陀螺罗经误差定义、产生原因,特性 10.1.2.2 陀螺罗经误差修正方法 知识点: 陀螺罗经误差及其修正 1、纬度误差:产生原因:垂直轴阻尼方式造成。(所以安许茨系列无纬度误差) 特征:北纬时为东误差,南纬时为西误差。 修正方法:1、外补偿法,2、内补偿法(力矩式补偿法),斯伯利系列罗经采用垂直 轴内补偿,阿玛—勃朗系列罗经采用水平轴内补偿 2、速度误差:产生原因:船舶恒向恒速运动造成。 特征:1、所有陀螺罗经都有速度误差,2、船速越大,速度误差越大;反之亦然。3、 纬度增高时,速度误差增大,4、速度误差随船舶航向而变,航向正北正南时,速度误 差最大;航向正东正西时,速度误差为 0;偏北方向航行时,速度误差为西误差;偏 南方向航行时,速度误差为东误差。 修正方法:1、查表法;2、外补偿法(安许茨系列);3、内补偿法(斯伯利系列、阿 玛—勃朗系列) 3、冲击误差:产生原因:船舶作机动航行所出现的惯性力对罗经的影响造成。 分类特征: 1)、第一类冲击误差:惯性力作用在陀螺罗经重力控制设备上而产生的冲击误差。通 常在船舶机动终了时,第一类冲击误差值最大。第一类冲击误差在船舶机动终了后经
航海学单选112121【海事局内部真题】
航海学单选 112121【海事局内部 真题】B.(平均海面高度-当时潮高) C.(平均大潮高潮高-当时潮高) D.(平均大潮高潮高+当时潮高) 单选】 船舶不得不进入冰区时,应慢速并且保持船首与冰区边缘成直角驶入,一旦船首进入冰区后,应 ______以维持船首向和控制船舶运动。
Ⅰ、速度不变;Ⅱ、适当加速;Ⅲ、适当减速A.Ⅰ B.Ⅱ C.Ⅲ D.Ⅰ或Ⅱ 在天文三角形 PNZB 中,PN 为仰极,Z 为天顶,B 为天体,则该三角形的 ZB 弧称为:A.顶距 B.极距 C.天体高度 D.余纬 单选】 潮汐周日不等主要是由于:A.月球、太阳赤纬较小引起的 B.太阳赤纬较大引起的 C.月球赤纬不等于零引起的 D.太阳和月球与地球相对位置不同引起的 【单选】 测者眼高为 25m,物标高程为 25m,则物标地理能见距离为______海里。
A.12.54 B.20.9 C.10.45 D.8.36 单选】 船舶的航速在 23 节以上时,动态信息发送间隔是:A.2 秒钟 B.3 分钟 C.6 秒钟 D.10 秒钟 【单选】 GPS 导航仪所显示的航迹偏差是指:A.卫星船位到推算船位的方向 B.卫星船位与推算船位的距离 C.卫星船位到计划航线的垂距 D.航迹向与计划航向的差值 【单选】 关于中分纬度算法正确的是:A.在地球椭球体的基础上建立起来的 B.在地球圆球体的基础上建立起来的 C.在大地球体的基础上建立起来的 D.在地球椭圆体的基础上建立起来的单选】 在海图对景图下标有“方位 000°,14n mile”,表明对景图上的山形是:A.从该物标的北方 14 海里向南所看到的形状 B.从该物标的北方 14 海里向北所看到的形状 C.从该物标的南方 14 海里向北所看到的形状 D.从该物标的南方 14 海里向南所看到的形状 【单选】 某船 TC357°,测灯塔 A 的 TB23°.5,半小时后又测得 A 的 TB42°,若船速为 14kt,则该船与 A 的正横距离为:A.7' B.6' C.8' D.5'.6 【单选】 采用方位避险,如所选避险物标和危险物同在航线左侧,且避险物标位于危险物前方,避险方 位为 060°,陀罗差 2°E,则在下列哪种情况下表明船舶不存在航行危险?A.实测陀罗方位 062° B.实测真方位 062° C.实测陀罗方位 060° D.实测真方位 058° 【单选】 英版海图图式中,缩写“Q”表示:A.连续甚快闪光B.连续快闪光 C.连续超快闪光 D.间断超快闪光 【单选】 某轮计划由 23°10′.2N,106°26′.5W,航行到 52°55′.0N,173°00′.0E,则该轮的大圆始航向为:A.319° B.311° C.041° D.049° 【单选】 GPS 卫星导航系统是一种______卫星导航系统。
航海仪器实操安许茨4型陀螺罗经
百度文库- 让每个人平等地提升自我安许茨(ANSCHUTZ)系列陀螺罗经1、罗经开机前的检查与准备(1)从罗经桌注液孔测量贮液缸液面高度,液面到注液孔上沿的距离不应大于4cm~5cm,否则液体数量不够,应添加液体。
(2)检查并调整各分罗经航向与主罗经航向相等。
(3)检查变压器箱上的“电源开关”和主罗经箱上的“随动开关”应放在“Off”位置。
(4)检查各接线板、插头插座、保险丝应无损坏并接触良好。
机械转动部分的转动应正常。
(5)检查并调整航向记录器的记录笔所在记录纸上的航向等于主罗经航向,时间等于船钟时间。
(6)检查主罗经及各分罗经的照明灯及调节应正常,并调节亮度适当。
2、开机步骤(1)接通变压器箱上的“电源开关(main witch)”。
(2)应做如下检查:(3)①三个三相电流指示灯应较亮;(4)②从罗经箱观测窗口观察陀螺球应开始缓慢转动,说明陀螺电机三相电已接通,陀螺球已工作。
(5)20min后,接通主罗经上的“随动开关(follow-up switch)”。
(6)应做如下检查:(7)①再次检查并调整分罗经航向与主罗经航向相等;(8)②约30min左右,三相电流指示灯亮度变暗,其中第一相电流指示灯最亮、第二相电流指示灯亮最暗、第三相电流指示灯亮度适中,说明三相电流已达到正常值;(9)③当支承液体温度达到52︒C,陀螺球稳定指北时,检查陀螺球高度应符合要求,检查陀螺球高度时罗经桌应水平。
3、罗经读数读出航向刻度盘上的航向数据(精确到0.5度)4、关机(1)关闭“随动开关”。
(2)关闭“电源开关”使用注意事项:(1)经常检查罗经的各项参数(三相和单相电压、三相电流、陀螺球高度、支承液体温度、支承液体液面高度、分罗经航向)均应正常。
(2)航行中若有速度误差,观测的航向和方位应通过查表计算消除速度误差。
(3)当报警器报警时,必须对支承液体采取降温措施。
当支承液体温度达到60︒C时,罗经已不能正常工作,应关闭罗经。
安许茨20型陀螺罗经1

3、故障信号显示
出现故障 随动系统被切断
第一次ED1 第二次ED2 第三次ED3 第四次ED4
航向显示被取消 自动重新起动尝试
四次起动失败
显示 故障 字符
罗经 系统 关闭
故障 字符 储存
故障字符所表示的含义如下: E1: 陀螺罗经供电故障 E2: 陀螺电源故障 E3: 编码器故障 E4: 陀螺电流偏离正常值范围 E5: 随动系统故障 E6: 温度传感器故障 E7: 陀螺球高度偏离正常值范围 E8: 加热器统故障
• 电子传感器 PCB板
安许茨标准20型陀螺罗经
四、电路部分 • 电源系统 • 随动系统 • 温控系统 • 信号检测系统
---其元器件基本上都安装在电子印制电路板PCB板上
安许茨标准20型陀螺罗经
1、电源系统
• 任务: 将船舶电源变换成陀螺罗经 系统所需 要的各种电源.
• 组成: 数个稳压电路 和(55V 400HZ)逆变器.
E9: 支承液体温度>70ºC
4、切断陀螺罗经随动系统(因测试或修理需要)
切断: 步调开关B11中的开关G置于OFF 重新接通: 步调开关B11中的开关G重新置于ON
六、维护与保养
1、更换支承液体和密封圈 • 规定每三年更换一次 • 关闭罗经,约等30min,方可进行 • 230cm3蒸馏水(红色标签) 从红螺钉孔注入储藏室 • 840cm3支承液体(绿色标签) 从绿色螺钉孔注入 • 顶部测量锥体查看支承液体已注满
• 液浮+离心泵产生的 液流平衡上托力
--离心泵的作用
• 定中心 • 辅助支承上托力
返回
返回
随动部分
--组成
•随动球 • 弹性减振波纹
管摆式连接器 • 方位齿轮 • 汇电环组件
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
C3: 支承液体温度>65º C
C4: 温度控制器功能失效
C5: 船电断电且支承液体温度≥45º C
3、故障信号显示
出现故障
随动系统被切断
第一次ED1
航向显示被取消
第二次ED2
第三次ED3 第四次ED4
自动重新起动尝试
四次起动失败 显示 故障 罗经 系统 故障
字符
储存
字符
关闭
4、切断陀螺罗经随动系统(因测试或修理需要)
E9: 支承液体温度>70º C
六、维护与保养
1、更换支承液体和密封圈
• 规定每三年更换一次
• 关闭罗经,约等30min,方可进行 • 230cm3蒸馏水(红色标签) 从红螺钉孔注入储藏室 • 840cm3支承液体(绿色标签) 从绿色螺钉孔注入
• 顶部测量锥体查看支承液体已注满
六、维护与保养
蒸馏水注入 支承液体
•
安许茨标准20型陀螺罗经
三、主罗经结构
•灵敏部分
•
随动部分 固定部分
•
返回
返回
灵敏部分---陀螺球(尺寸较小) --球壳
• 顶电极
• 底电极 • 赤道电极
尺寸:
直径115mm
灵敏部分---陀螺球 --球内
• 双转子
• 无电磁上托线圈 • 无液态润滑油 • 抽真空充氦气
转速为: 12000r/min
为:0.5VDC/度
2、随动系统
主罗经航向
控制箱转换
5路步进电机式分罗经(步进精度1º /6) 8路自整角机式分罗经
3、支承液体温度检测与控制系统
• 作用: 使支承液体的温度自动保持在规
定的工作范围内,以保持陀螺球 位于正常高度.
• 工作温度: 50º C ± 1º C
随时从数字监视器上读出.
3、支承液体温度检测与控制系统 • 组成: 温度传感器、调制解调器、
CPU、温度控制器、加热器、
电风扇和过温保护装置. • 工作过程:
筒式半导体温度传感器(检测出模拟电压信号)
A/D CPU 控制加热器加热 控制电风扇降温 温度控制器
• 随动系统接通 • 加热器电压下降 • 加热器不加温 • 电风扇接通
系统所需 要的各种电源.
• 组成: 数个稳压电路
和(55V 400HZ)逆变器.
• 逆变器的作用:
将直流24V船电变换成陀螺及离心泵 所需的单相55V 400HZ 电源.
2、随动系统
• 组成:
随动传感器、放大器 、 A/D转换器、CPU、 随动电机控制器和随动步进电机.
随动传感器
• 随动电压信号
---显示支承液体温度
(接通电源,加热器加热)
h38.8º C
h表示处于加热状态
• 观察显示信号(数字监视器),判断工作状态
---液温45º C时,显示航向. 130.5.
亮点表示陀螺球处于找北过程中
此时随动系统被自动接通
---约3h后,亮点消失 131.8
(航向指示精度≤2º ) ---约5h后,陀螺球完全稳定 (航向指示精度达到要求) 132.8
• 其余参数参见技术手册
五、航向分罗经的使用
工作指示灯
报警复位
亮度调节
• 红色闪亮
• 黄色闪亮 • 绿色闪亮
五、航向分罗经的使用
航向匹配指示灯
测试指示灯
4、信号检测与指示系统
本系统控制器 • 一个单片机(CPU)系统
• 配备不同的传感器及相应的接口电路
本系统传感器
• 温度传感器
• 导电率传感器
• 陀螺球高度检测传感器
其它信号检测与指示均由软件来完成.
五、使用
1、起动
• 只需将24VDC船电接通, 整套罗经便会自动完成全部起动过程. • 观察显示信号(数字监视器),判断工作状态
灵敏部分---陀螺球 --支承方式
• 液浮+离心泵产生的
液流平衡上托力
--离心泵的作用
• 定中心
• 辅助支承上托力
返回
返回
随动部分
--组成
•随动球
• 弹性减振波纹
管摆式连接器
• 方位齿轮 • 汇电环组件
• 顶电极
• 储藏室(230cm3)纯蒸馏水
上半球
• 透明测量锥体
• 筒式加热器
• 印制电路板
2、警告信号显示
• 在使用过程中 • 数字航向的小数点闪烁 • 表示罗经工作不正常
133.8
2、警告信号显示
• 打开罗经密封门 • 按键B14(电子传感器印制电路板上)
• 按一次B14,航向消失
• 再按,显示警告字符
2、警告信号显示
警告字符所表示的含义如下:
C1: 电风扇功能失效
C2: 加热器功能失效
• 数字监视器上航向中小数点闪烁,
按B14 • 警告字符C3 显示C3警告字符 报警字符E9
• 温度断电保护装置切断加热器的电路
4、信号检测与指示系统
利于操作者正确使用和快速判断故障
--- 检测和显示的项目:
• 陀螺球高度
• 支承液体导电率
• 陀螺及离心泵的工作总电压
• 陀螺稳定时间 • 陀螺运转累计时间 • 陀螺误差与故障 --- 所有检测和显示的项目可在同一个 数字监视器上选择显示之.
•电风扇
• 电子传感器
PCB板
固定部分
• 循环编码器
(212脉冲)
• 方பைடு நூலகம்步进电机 • 电子传感器
PCB板
安许茨标准20型陀螺罗经
四、电路部分
• • •
电源系统
随动系统 温控系统
•
信号检测系统
---其元器件基本上都安装在电子印制电路板PCB板上
安许茨标准20型陀螺罗经
1、电源系统
• 任务: 将船舶电源变换成陀螺罗经
• 底电极
下半球
• 两随动电极(对准陀螺球赤道电极) • 离心泵 • 管状导电率传感器
--- 支承液 体温度上 升到45º C 时,随动系 统自动被 主控制器 接通.
• 方位齿轮 • 编码器
弹性减振波纹 管摆式连接器 • 是性能卓越
的三向防振
装置 返回
固定部分
• 条形散热片
• 数字监视器
固定部分
• 对准误差(船舶准确航向与工厂测试航向差值),
填入罗经密封门内面的表格中
5、参数检测 利用步调开关B11和按键B14可以调出 电子传感器存储的全部数据,并在 数字监视器上显示出来.
• 将步调开关B11中的开关H置于OFF
• 每揿一次按键B14,
此后数字显示的参数变换一次
5、参数检测 工作正常时,部分参数: • 正常工作温度: 50º C ± 1º C • 陀螺球正常高度: 1.5mm ± 0.5mm • 起动时总电流: 410mA ± 50mA 运转时总电流: 290mA ± 50mA (陀螺约为200mA,泵约为90mA)
锥体查看
六、维护与保养
2、更换陀螺球
• 步骤同上
3、更换电子传感器的印制电路板 • 参见技术手册
4、编码器零位调整(参考航向输入) 注意 • 罗经安装后,必须调整编码器零位 • 罗经起动5h后在码头上进行 调整 • 首先准确确定船首的真方位 • 将步调开关B11中的开关A置于OFF,
按键B14进行调整(参见技术手册)
安许茨标准20型陀螺罗经
一、特点
• 小型罗经,1994年推出的最新型号 • 结构紧凑,重量轻,能耗低,
特别适合于小型船舶使用.
• 高精度,优越的动态负载特性
适合于高速船舶使用.
安许茨标准20型陀螺罗经
二、配套方式
•
紧凑型(Type Standard 20 Compact) 功能附加型(Standard 20 Plus)
切断: 步调开关B11中的开关G置于OFF 步调开关B11中的开关G重新置于ON
重新接通:
故障字符所表示的含义如下: E1: 陀螺罗经供电故障 E2: 陀螺电源故障 E3: 编码器故障 E4: 陀螺电流偏离正常值范围
E5: 随动系统故障
E6: 温度传感器故障
E7: 陀螺球高度偏离正常值范围
E8: 加热器统故障