齿轮渐开线方程图解
solidworks渐开线齿轮精确画法
渐开线齿轮画法Solid works从2010版开始,在方程式驱动的曲线中可以输入参数方程,2011版可以输入由方程驱动的3D曲线。
可以用渐开线的参数方程来画标准齿轮,以模数m=2,齿数z=30的直齿轮为例说明方程式驱动的曲线画渐开线齿轮的方法。
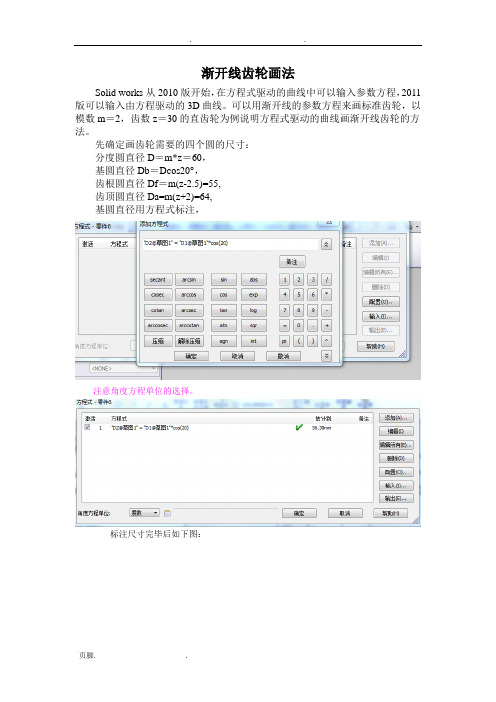
先确定画齿轮需要的四个圆的尺寸:分度圆直径D=m*z=60,基圆直径Db=Dcos20°,齿根圆直径Df=m(z-2.5)=55,齿顶圆直径Da=m(z+2)=64,基圆直径用方程式标注,注意角度方程单位的选择。
标注尺寸完毕后如下图:插入方程式驱动的曲线选择参数性,输入渐开线的参数方程:Xt=Rb*(tsint+cost)Yt=Rb*(sint-tcost) ,Rb为基圆半径。
输入方程时要把角度转为弧度。
预览到如上图的曲线。
确定后画一条中心线镜向,裁剪(在2010版中裁剪或镜向会使渐开线过定义,原因不明)成下面第二幅图的形状。
标注齿厚s的尺寸,s=p/2=πm/2=π.标注尺寸后,原有的对称关系有可能会错乱,需要重新标注几何关系,在基圆与齿根圆之间加圆弧与齿根圆相切半径(0.25m),如下图。
标注完几何关系后使中心线水平以完全定义草图。
拉伸时用轮廓选择拉伸两次成下图。
最后阵列得到齿轮模型。
以下为渐开线参数方程的推导:以θ(rad)为参数,AP=l=θr,P点的轨迹即为以E点为起点的渐开线。
OB=OC+BC=rcosθ+θrsinθPB=AC-AD=rsinθ-θrcosθ得,P(-(rcos θ+θrsin θ),(rsin θ-θrcos θ))。
sgn(Px)=-1与渐开线的旋转方向有关。
cos tan *cos **sin *sin **cos b kk kk k b b b b r r a a a x r r rad y r r rad θθθθθθθ⎧=⎪⎨⎪=-⎩=+⎧⎨=-⎩。
渐开线齿轮齿廓范成实验- 机械设计基础

渐开线齿轮齿廓范成实验- 机械设计基础渐开线是一种齿廓曲线,具有相对滚动过程中齿面接触良好、传动精度高等优点,广泛应用于各种机械传动中。
齿轮是渐开线的常见应用,而齿轮的齿廓设计对保证传动的性能至关重要。
本文将介绍渐开线齿轮齿廓的范成实验流程及方法。
渐开线齿轮齿廓的范成实验主要依据以下原理:1.渐开线齿轮齿廓曲线的方程若一个圆在另一个圆内滚动,且同时保持两圆心之间距离不变,则圆上某点的轨迹为渐开线。
圆的轨迹称为基圆,而另一圆称为从动圆。
若基圆为圆柱,从动圆为齿轮,则圆心所在直线即为两齿轮轴线。
令Z1和Z2分别为主动轮和从动轮的齿数,d1和d2分别为主动轮和从动轮的分度圆直径,则渐开线方程为:x=a(θ-sinθ)其中a=d1/2,θ为参数,s=Z2/Z1,实际计算时一般采用插齿法进行计算。
2.插齿法插齿法也称为逐齿法,主要用于推导渐开线齿轮齿廓。
其基本思想是从基圆上一点出发,逐步向定轴方向平移,并将平移轨迹图转换为从动轮上的齿廓。
1.确定齿轮参数在进行齿轮齿廓范成实验前,需要先确定齿轮的参数,包括齿数、分度圆直径、法向压力角等。
一般情况下,齿轮的参数由机械设备工程师根据实际需求进行设计。
2.绘制齿轮的CAD图根据齿轮的参数绘制齿轮的CAD图,使用CAD图软件或其他计算机辅助设计软件完成齿轮的绘制工作。
3.使用CNC机床制作齿轮母模在完成齿轮的CAD图设计后,将其通过CAM软件编程,使其转化为CNC机床所能识别的指令,然后通过CNC机床进行齿轮母模的加工。
4.制作齿轮精度测量仪制作齿轮精度测量仪,测量仪主要包括准确的齿轮中心定位装置,精确的齿廓扫描仪和数据处理器等。
5.进行齿轮齿廓范成实验利用齿轮的母模和精密齿轮测量仪,将齿轮母模和齿轮之间进行相互配合和精密测量,即可获得高精度的齿轮齿廓。
1.加工齿轮母模时需要采用高精度的CNC机床,以保证母模加工的精度和表面光洁度。
2.制作齿轮精度测量仪时需要选择精度高、鲁棒性强的元器件,并利用合理的设计方法,避免测量误差的产生。
Proe各种曲线方程(如齿轮的渐开线方程)

PROE曲线方程第一个:参数方程1.卡笛尔坐标下的渐开线参数方程卡笛尔坐标系下的渐开线参数方程如下(设压力角afa 由0到60度,基圆半径为10):afa=60*tx=10*cos(afa)+pi*10*afa/180 * sin(afa)y=10*sin(afa)-pi*10*afa/180 * cos(afa)z=02.圆柱坐标下的渐开线参数方程圆柱坐标系下的渐开线参数方程如下(设基圆半径为10,压力角afa 从0到60度):afa = 60*tr = (10^2 + (pi*10*afa/180)^2)^0.5theta = afa-atan((pi*10*afa/180)/10)z = 0在Pro/ENGINEER 里使用 Feature > Creat > Datum > Curve > From Equation 命令,选择一个坐标系,然后选择坐标类型(卡笛尔坐标/圆柱坐标/球坐标),在窗口里输入以上方程即可生成一段精确的渐开线。
69. 圆柱齿轮齿廓的渐开线方程:afa=60*tx=10*cos(afa)+pi*10*afa/180*sin(afa)x=10*sin(afa)-pi*10*afa/180*cos(afa)z=0注:afa为压力角,取值范围是0到60,10为基圆半径。
第一:参数方程圆渐开线方程:x=R*(cos(t*360)+t*2*pi*sin(t*360))y=R*(sin(t*360)-t*2*pi*cos(t*360))z=0t (将从0变到1) R为基圆半径pi=3.1415921.卡笛尔坐标下的渐开线参数方程卡笛尔坐标系下的渐开线参数方程如下(设压力角afa 由0到60度,基圆半径为10):afa=60*tx=10*cos(afa)+pi*10*afa/180 * sin(afa)y=10*sin(afa)-pi*10*afa/180 * cos(afa)2.圆柱坐标下的渐开线参数方程圆柱坐标系下的渐开线参数方程如下(设基圆半径为10,压力角afa 从0到60度):afa = 60*tr = (10^2 + (pi*10*afa/180)^2)^0.5theta = afa-atan((pi*10*afa/180)/10)z = 0proe曲线方程大全1.碟形弹簧圓柱坐标r = 5theta = t*3600z =(sin(3.5*theta-90))+24*t2.葉形线笛卡儿坐標标a=10x=3*a*t/(1+(t^3))y=3*a*(t^2)/(1+(t^3))3.螺旋线(Helical curve)圆柱坐标(cylindrical)r=ttheta=10+t*(20*360)z=t*34.蝴蝶曲线球坐标rho = 8 * ttheta = 360 * t * 4phi = -360 * t * 85.渐开线笛卡尔坐标系r=1ang=360*ts=2*pi*r*tx0=s*cos(ang)y0=s*sin(ang)x=x0+s*sin(ang)y=y0-s*cos(ang)z=06.螺旋线.笛卡儿坐标x = 4 * cos ( t *(5*360)) y = 4 * sin ( t *(5*360)) z = 10*t7.对数曲线笛卡尔坐标系z=0x = 10*ty = log(10*t+0.0001)8.球面螺旋线球坐标系rho=4theta=t*180phi=t*360*209.双弧外摆线卡迪尔坐标l=2.5b=2.5x=3*b*cos(t*360)+l*cos(3*t*360) Y=3*b*sin(t*360)+l*sin(3*t*360)10.星行线卡迪尔坐标a=5x=a*(cos(t*360))^3y=a*(sin(t*360))^311.心脏线圓柱坐标a=10r=a*(1+cos(theta))theta=t*36012.圆内螺旋线柱座标系r=10+10*sin(6*theta)z=2*sin(6*theta)13.正弦曲线笛卡尔坐标系x=50*ty=10*sin(t*360)z=014.太阳线柱坐标r=1.5*cos(50*theta)+1theta=t*360z=015.费马曲线(有点像螺纹线)数学方程:r*r = a*a*theta圓柱坐标方程1: theta=360*t*5a=4r=a*sqrt(theta*180/pi)方程2: theta=360*t*5a=4r=-a*sqrt(theta*180/pi)由于Pro/e只能做连续的曲线,所以只能分两次做16.Talbot 曲线卡笛尔坐标theta=t*360a=1.1c=sin(theta)f=1x = (a*a+f*f*c*c)*cos(theta)/ay = (a*a-2*f+f*f*c*c)*sin(theta)/b18.Rhodonea 曲线笛卡尔坐标系theta=t*360*4x=25+(10-6)*cos(theta)+10*cos((10/6-1)*theta) y=25+(10-6)*sin(theta)-6*sin((10/6-1)*theta)19. 抛物线笛卡儿坐标x =(4 * t)y =(3 * t) + (5 * t ^2)z =020.螺旋线圓柱坐标r = 5theta = t*1800z =(cos(theta-90))+24*t21.三叶线圆柱坐标a=1theta=t*380b=sin(theta)r=a*cos(theta)*(4*b*b-1)22.外摆线迪卡尔坐标theta=t*720*5b=8a=5x=(a+b)*cos(theta)-b*cos((a/b+1)*theta) y=(a+b)*sin(theta)-b*sin((a/b+1)*theta) z=023. Lissajous 曲线theta=t*360a=1b=1c=100n=3x=a*sin(n*theta+c)y=b*sin(theta)24.长短幅圆内旋轮线卡笛尔坐标a=5b=7c=2.2theta=360*t*10x=(a-b)*cos(theta)+c*cos((a/b-1)*theta) y=(a-b)*sin(theta)-c*sin((a/b-1)*theta)25.长短幅圆外旋轮线卡笛尔坐标theta=t*360*10a=5b=3c=5x=(a+b)*cos(theta)-c*cos((a/b+1)*theta) y=(a+b)*sin(theta)-c*sin((a/b+1)*theta)26. 三尖瓣线a=10x = a*(2*cos(t*360)+cos(2*t*360))y = a*(2*sin(t*360)-sin(2*t*360))27.概率曲线!笛卡儿坐标x = t*10-5y = exp(0-x^2)28.箕舌线笛卡儿坐标系a = 1x = -5 + t*10y = 8*a^3/(x^2+4*a^2)29.阿基米德螺线柱坐标a=100theta = t*400r = a*theta30.对数螺线柱坐标theta = t*360*2.2a = 0.005r = exp(a*theta)31.蔓叶线笛卡儿坐标系a=10y=t*100-50solvex^3 = y^2*(2*a-x)for x32.tan曲线笛卡儿坐标系x = t*8.5 -4.25y = tan(x*20)33.双曲余弦x = 6*t-3y = (exp(x)+exp(0-x))/234.双曲正弦x = 6*t-3y = (exp(x)-exp(0-x))/235.双曲正切x = 6*t-3y = (exp(x)-exp(0-x))/(exp(x)+exp(0-x)) 36.一峰三驻点曲线x = 3*t-1.5y=(x^2-1)^3+137.八字曲线x = 2 * cos ( t *(2*180))y = 2 * sin ( t *(5*360))z = 038.螺旋曲线r=t*(10*180)+1theta=10+t*(20*180)z=t39.圆x = cos ( t *(5*180))y = sin ( t *(5*180))z = 040.封闭球形环绕曲线rho=2theta=360*tphi=t*360*1041.柱坐标螺旋曲线x = 100*t * cos ( t *(5*180)) y = 100*t * sin ( t *(5*180)) z = 042.蛇形曲线x = 2 * cos ( (t+1) *(2*180)) y = 2 * sin ( t *(5*360))z = t*(t+1)43.8字形曲线柱坐标theta = t*360r=10+(8*sin(theta))^244.椭圆曲线笛卡尔坐标系a = 10b = 20theta = t*360x = a*cos(theta)y = b*sin(theta)45.梅花曲线柱坐标theta = t*360r=10+(3*sin(theta*2.5))^246.另一个花曲线theta = t*360r=10-(3*sin(theta*3))^2z=4*sin(theta*3)^247.改一下就成为空间感更强的花曲线了;)theta = t*360r=10-(3*sin(theta*3))^2z=(r*sin(theta*3))^248.螺旋上升的椭圆线a = 10b = 20theta = t*360*3x = a*cos(theta)y = b*sin(theta)z=t*1249.甚至这种螺旋花曲线theta = t*360*4r=10+(3*sin(theta*2.5))^2z = t*1650 鼓形线笛卡尔方程r=5+3.3*sin(t*180)+ttheta=t*360*10z=t*1051 长命锁曲线笛卡尔方程:a=1*t*359.5b=q2*t*360c=q3*t*360rr1=w1rr2=w2rr3=w3x=rr1*cos(a)+rr2*cos(b)+rr3*cos(c) y=rr1*sin(a)+rr2*sin(b)+rr3*sin(c)52 簪形线球坐标rho=200*ttheta=900*tphi=t*90*1053.螺旋上升曲线r=t^10theta=t^3*360*6*3+t^3*360*3*3z=t^3*(t+1)54.蘑菇曲线球坐标rho=t^3+t*(t+1)theta=t*360phi=t^2*360*20*2055. 8字曲线a=1b=1x=3*b*cos(t*360)+a*cos(3*t*360) Y=b*sin(t*360)+a*sin(3*t*360)56.梅花曲线theta=t*360r=100+50*cos(5*theta)z=2*cos(5*theta)57.桃形曲线rho=t^3+t*(t+1)theta=t*360phi=t^2*360*10*1058.碟形弹簧圓柱坐r = 5theta = t*3600z =(sin(3.5*theta-90))+2459 环形二次曲线笛卡儿方程:x=50*cos(t*360)y=50*sin(t*360)z=10*cos(t*360*8)60 蝶线球坐标:rho=4*sin(t*360)+6*cos(t*360^2) theta=t*360phi=log(1+t*360)*t*36061.正弦周弹簧笛卡尔:ang1=t*360ang2=t*360*20x=ang1*2*pi/360y=sin(ang1)*5+cos(ang2)z=sin(ang2)62.环形螺旋线笛卡尔:x=(50+10*sin(t*360*15))*cos(t*360) y=(50+10*sin(t*360*15))*sin(t*360) z=10*cos(t*360*5)63.内接弹簧笛卡尔:x=2*cos(t*360*10)+cos(t*180*10)y=2*sin(t*360*10)+sin(t*180*10)z=t*664.多变内接式弹簧笛卡尔:x=3*cos(t*360*8)-1.5*cos(t*480*8)y=3*sin(t*360*8)-1.5*sin(t*480*8)z=t*865.柱面正弦波线柱坐标r=30theta=t*360z=5*sin(5*theta-90)66.漩涡线球坐标:rho=t*20^2theta=t*log(30)*60phi=t*720067. 手把曲线笛卡尔:thta0=t*360thta1=t*360*6r0=400r1=40r=r0+r1*cos(thta1)x=r*cos(thta0)y=r1*sin(thta1)z=068.篮子圆柱坐标r=5+0.3*sin(t*180)+ttheta=t*360*30z=t*569. 圆柱齿轮齿廓的渐开线方程:笛卡尔坐标afa=60*tx=10*cos(afa)+pi*10*afa/180*sin(afa)x=10*sin(afa)-pi*10*afa/180*cos(afa)z=0注:afa为压力角,取值范围是0到60,10为基圆半径。
Proe设计常用齿轮的参数及关系、渐开线方程

Proe设计常用齿轮的参数及关系、渐开线方程这里稍微总结了四种常用的齿轮的参数及关系:1.柱形直齿轮所需参数:(11个)齿数(z)、模数(m)、压力角(angle)、齿厚(b)齿顶圆(da)、分度圆(d)、齿基圆(db)、齿根圆(df)齿顶高系数(hax)、顶隙系数(cx)、变位系数(x)齿顶高(ha)、齿根高(hf)基本关系:ha=mhf=1.25*mda=m*(z+2)d=m*zdb=d*cos(angle)df=m*(z-2.5)渐开线方程:theta=45*tr=db/2x=r*cos(theta)+r*sin(theta)*pi*theta/180 y=r*sin(theta)-r*cos(theta)*pi*theta/180 z=02.斜齿轮所需参数(14个)齿数(z)、模数(mn)、压力角(alpha)、螺旋角(beta)、齿厚(b)齿顶圆(da)、分度圆(d)、齿基圆(db)、齿根圆(df)齿顶高系数(hax)、顶隙系数(cx)、变位系数(x)齿顶高(ha)、齿根高(hf)基本关系:ha=(hax+x)*mnhf=(hax+cx-x)*mnd=mn*z/cos(beta)da=d+2*hadb=d*cos(alpha)df=d-2*hf渐开线方程:theta=45*tr=db/2x=r*cos(theta)+r*sin(theta)*pi*theta/180 y=r*sin(theta)-r*cos(theta)*pi*theta/180 z=03.锥形齿轮(伞形齿轮)所需参数(24个)齿数(z)、模数(m)、压力角(alpha)齿顶圆(da)、分度圆(d)、齿基圆(db)、齿根圆(df)齿顶高系数(hax)、顶隙系数(cx)、变位系数(x)齿顶高(ha)、齿高(h)、齿基高(hb)、齿根高(hf)顶锥角(delta_a)、分锥角(delta)、基锥角(delta_b)、根锥角(delta_f)锥顶宽(ba)、锥宽(b)、锥基宽(bb)、锥根宽(bf)锥距(rx)、与之相啮合的大齿轮齿数(z_asm)基本关系:ha=(hax+x)*mhf=(hax+cx-x)*mh=ha+hfdelta=atan(z/z_asm)d=m*zdb=d*cos(alpha)da=d+2*ha*cos(delta)df=d-2*hf*cos(delta)hb=(d-db)/(2*cos(delta))rx=d/(2*sin(delta))theta_a=atan(ha/rx)theta_b=atan(hb/rx)theta_f=atan(hf/rx)delta_a=delta+theta_adelta_b=delta-theta_bdelta_f=delta-theta_fba=b/cos(theta_a)bb=b/cos(theta_a)bf=b/cos(theta_a)渐开线方程:r=d11/2 (d11是分度圆直径,需具体确定)theta=60*tx=r*cos(theta)+r*sin(theta)*pi*theta/180 y=r*sin(theta)-r*cos(theta)*pi*theta/180z=04.人字形齿轮从上图不难看出:人字形齿轮其实是两个斜齿轮复合而成,其参数与斜齿轮一致渐开线方程:theta=60*tr=db/2x=r*cos(theta)+r*sin(theta)*pi*theta/180y=r*sin(theta)-r*cos(theta)*pi*theta/180z=0需要注意的是:以上渐开线均是以Proe的FRONT面为草绘面画圆时正确的渐开线。
齿轮基本参数和概念
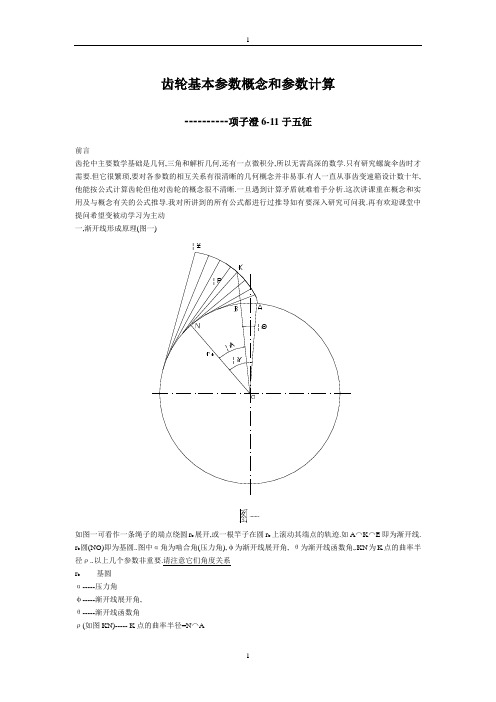
齿轮基本参数概念和参数计算----------项子澄6-11于五征前言齿抡中主要数学基础是几何,三角和解析几何,还有一点微积分,所以无需高深的数学.只有研究螺旋伞齿时才需要.但它很繁琐,要对各参数的相互关系有很清晰的几何概念并非易事.有人一直从事齿变速箱设计数十年,他能按公式计算齿轮但他对齿轮的概念很不清晰.一旦遇到计算矛盾就难着手分析.这次讲课重在概念和实用及与概念有关的公式推导.我对所讲到的所有公式都进行过推导如有要深入研究可问我.再有欢迎课堂中提问希望变被动学习为主动一,渐开线形成原理(图一)如图一可看作一条绳子的端点绕圆r b展开,或一根竿子在圆r b上滚动其端点的轨迹.如A⌒K⌒E即为渐开线. r b圆(NO)即为基圆..图中α角为啮合角(压力角),φ为渐开线展开角, θ为渐开线函数角,.KN为K点的曲率半径ρ..以上几个参数非重要.请注意它们角度关系r b----------基圆α-----压力角φ-----渐开线展开角,θ-----渐开线函数角ρ(如图KN)----- K点的曲率半径=N⌒A二, 渐开线性质(图二)1,2,渐开线上任何一点的法线必切于基圆r b3,渐开线形状只取决于基圆r b的大小4,当基圆r b=∞时渐开线为直线∴可用齿条刀具加工齿轮5,ρ=kN-----是K点的曲率半径, ρ=kN-=N⌒A弧长6,一对渐开线齿啮合的充分和必要的条件是它们的基节相等.(见图三,以后节讲)7,所谓变位齿轮就是其齿形在渐开线上选用不同的区段.(见图三,在下一节讲)三, 渐开线方程因极坐标方便直观我们只讲极坐标方程.(如图二)以O为座标原点,由⊿ONK可得r k=OK= r b/Cosαk---------------(1) 式中r b = ON, r k =OKθk=tgαk-αk---------------(2) (从直观可见, 当用弧度表示θk和αk时即得此式(证明:θk=φK-αk∵长度NK= N⌒A弧长∴, N⌒A弧度= (N⌒A弧长/ r b-) = (NK/ r b)= tgαk)θk称为渐开线角θk=invαk= tgαk-αk-.这是个超越函数. inv是involute 的缩写invαk称为渐开线函数亦可得ρ= r b tgαk------------------(1)’三渐开线齿轮基本知识1分类斜齿轮(1)圆柱齿轮直齿轮蜗轮蜗杆直锥齿轮(2,)锥齿轮 格里森螺旋伞齿抡 奥林肯 双曲线齿轮克林根贝尔格2功能:两者都可为改变传动比, 传动力和换向3,左右旋向的确定.伸出双手,手心向上,齿轮的轴心线与手一致.观察旋线和那个大呣指一致,4,齿轮所涉及的内容齿形的设计计算强度计算齿轮精度及公差齿轮测量齿轮加工工艺材料选用和热处理5,为什么渐开线齿轮被广泛地被使用有保证稳定传动所必须的性能即当传入稳定的转速和扭矩时传出的转速和扭矩亦必须稳定的,这就要求作用在齿面上的法向力和变角速度相对于齿整体轮是不变的(见四(8)节).而渐开线齿形能做到这点 中心距变化后啮合仍符合啮合条件(见五节).制造简单可广泛使用变位齿轮大大改善性能(见五节)四,一对标准齿轮相啮合的啮合特性(见图三)1分度圆r 或d(直径)------齿轮在加工时与刀具作纯滚动的圆称为分度圆加工两O 1齿O 2齿标准齿轮时O 1齿O 2齿的r 1和r 2与刀具节线GPS 作纯滚动.此处刀具的齿厚=齿槽宽d=mZ-------------(3) (有了d后可定义m=d/Z称模数是表示齿大小有量刚的比值系数,Z为齿数)2,节点P, 即两齿轮作纯滚动的圆的切点.两齿啮合时,按齿数比例分割中心连线O1O2的点必为节点P.它的圆为节圆.单个齿不存在节点P标准齿轮啮合时,既然r1和r2都与刀具节线GPS作纯滚动∴r1和r2之间亦作纯滚动. ∴两O1齿O2齿标准齿轮的分度圆与节圆重合3,α1,α2-------分度圆压力角.即滚刀刀具压力角,或齿轮加工时与刀具作纯滚动的点上的压力角.或者说齿轮被加工时的节点上的压力角.. 分度圆压力角=刀具压力角一对标准齿啮合啮合时其节圆和分度圆重合α=.α’4,r e1和r e2--------齿顶半径5,r b1和r b2-------基圆半径由⊿PO1N1可得r b =r Cosα------------(4)6,PP’------周节p—在分度圆上相邻两齿廓的圆弧距离. p=mπ-----(5)∵在分度圆上齿轮的齿厚S=齿槽宽, ∴S= p/2= mπ/2--------------(6)(由圆周长L=πd p=L/Z可求得)7,EE’------基节p b----在基圆上相邻两齿廓的圆弧距离.p b= p Cosα------------(7)8,N1N2-----由图三知,两基圆相切的切点连线称为啮合线. 该对齿在啮合时一定在N1N2上接触啮合.∵(1)一对齿啮合时它们的法线方向是一致的,(2)根据渐开线的特性该点的法线必分别切于基圆r b1和r b2-(3)∴唯有此线即N1N2线能满足(1)(2)要求∴将N1N2线称为啮合线. 既然两齿始终沿N1N2线接触方向不变∴这两齿只能同步前进.在啮合啮合线上的啮合角即为节圆压力角.这是相对于成对啮合齿轮而言(而不是相对于某一牙齿的齿廓,一对齿轮的啮合角和此点的压力角的定义是不同的(,见图三’和图十一)9,既然两齿在N1N2线上作方相始终不变能稳定地传递扭矩和运动.在N1N2线走过的路程即为基圆滚过的路程亦就是O1和O2齿轮所滚过的基节是相等的. ∴两齿啮合的最基本的条件是两齿的基节必须相等另由图三’,当两齿啮合点不在节点P上,而是转到γ点接触时,作用力对整个齿轮而言相对于O1O2中心线的啮合角仍为α但对单齿形的压力角为αK10, AB--------啮合线的工作区(图三). A和B分别为O1和O2齿轮的外圆与啮合线的交点A和B(1)假如O1为主动齿轮,则啮合从A点开始到B点脱开. 外径越大啮合线的工作区越长(2).AB长与基节p b之比即为啮合重合系数ε(3)A点在基点N1之上则可正确啮合,否则会产生啮合干涉如这现象发生在加工,则产生根切..五, 变位或移距齿轮啮合时的重要关系式(见图四,图五和图六)(一),基本特征1,移距的加工特徴(见图四)红色的齿形和刀具是标准齿此时AA线既是刀具的分度线又是刀具的加工节线.与齿轮的分度圆r相切于AA线P点.刀具在AA线上的齿厚=齿槽即PG=GS(亦=齿轮的分度圆弧齿厚).绿色为加工正移距的齿形的刀具图.此时刀具的分度线从AA移到A’A’,移距量为ξm, 此时刀具在原AA上的齿槽变宽为P’’G’’而齿厚相应变窄G’’S’’,其变化值由⊿P P’P’’可知为ΔS=2ξm,tgα,----------------(8) (ξ为移距系数(或称变位系数,修正系数)它的标准符号用χ表示,但∵χ与x和乘号X很近∴我用ξ)注意: 此时加工的节线仍为AA,机床的挂轮没有变仅仅是将刀具外移∴齿轮的分度圆亦仍为r但此时刀具在绿线A”A”上的齿厚=齿槽,即P’G’=S’G’而刀具在家工节线上的齿厚P’’G’’增加了ΔS=2ξm,tgα亦就是齿轮在分度圆上的齿厚增加了2ξm,tgα.齿轮的外径亦由r e1变为r’e1就是说正移距齿具有(1) 渐开线齿形外移(2)齿厚变厚(3)齿顶高h a变高(以分度圆为界)2移距齿轮啮合时的特徴(见图五)(1) 如图五当(ξ1+ξ2)>0时称为正移距角度变位齿轮付时,图红色圆为节圆,其半径=r’,青色圆为分度圆, 其半径=r* 图例为是ξ1和ξ2都为正时的状况图即r’>r,即为正移距角度变位齿轮付此时α’ >α(**当r’<r时为负移距角度变位齿轮付, 即(ξ1+ξ2) <0, 此时α’<α(略)正移距角度变位齿轮付的直接特徴α’ >αA’ >AS’ >S(2)如图六当(ξ1+ξ2) =0或ξ1 =(-ξ2 )≠0 此时r’=r为零移距角度变位齿轮付即此时α’=α即节点的啮合角=分度圆压力角现分析(ξ1+ξ2) =0的几何关系:O1齿分析:这是标准齿轮啮合关系O1齿的相应齿条刀槽是Ggcp P槽(图六)如果将刀具向上移动ξm,距离来加工O1,齿,(见图六)就是将原加工标准齿的刀具节线APA向上移到A’A’,而其它加工的运动关系不变,即加工时的刀具节线和齿O1的加工节圆r1不变r1仍为分度圆,而刀具的分度线变为A”A’在其上的bp=pg而在刀具加工节线AA上GP>PB则此时弧齿厚P⌒u由原bp增到GP.增量ΔS=GP-pg=2ξm,tgα,O2齿分析: O2为负移具,其刀具的分度线同样由AA移到A’A’而加工节线仍为AA线∴O2的分度圆仍为r2∵是反相移距, ∴可将p P eBb看作刀具齿槽来切O2齿,显然O2的分度弧圆齿厚S2=P B,其厚度少了ΔS=pb-PB = 2ξm,tgα,结论:由于O`1和O2移距大小相等方向相反它们分度圆上的齿厚变化亦是大小相等正负相反它们在分度圆上接触条件没有变只是将分度圆上的齿厚相互增减∴分度圆和节圆重合..(二), 移距齿轮啮合时的α’和α的关系式(见图五)由⊿N1O1P得Cosα’=r b/r’---------------(9)得r b=r’Cosα’------------(10)或r’= r b / Cosα’--------------(11)由青色的直角三角形⊿P0O1 N0中可得r b=r Cosα-----------(12)(10)=(12)得,Cosα’= r1 Cosα/ r’1-----(13)∵中心距A,A’与半径r,r’是成比例的∴(13) 式可改为Cosα’= A Cosα/ A’--------(14)即当知道A’便可知节圆压力角α’六,变位对齿形的影响(或称移距,修正)见图七由于使用标准齿齿轮时易造成根切,其齿厚及因渐开线靠近基圆的曲线段使其啮合性能不佳等原因在齿轮设计时多采用变位.1,齿厚变化(见图七)图中r为分度圆也就是加工时的节圆MM为刀具加工节线,此时刀具的刀刃ABCD范成出齿廓为标准齿(见白色线齿廓),齿轮上分度圆弧齿厚如分度圆上的S⌒S,=刀具在节线上的齿槽SS.即SS=S⌒S当刀具向外移动ξm(ξ为移具系数, m为模数),值即刀具原节线MM移倒M’M’.即刀具的位置改为A’B’C’D’请注意(1)此时分度圆和加工节线不变仍分别为r和MM, 只是刀具外移.(2)M’M’此时是刀具的分度线,在齿线上刀具的齿厚=刀具的齿的齿槽.(3)此时刀具在加工节线上的齿槽SS变为S’S’∴刀具移距后所对应的齿轮分度圆弧齿厚为S’⌒S’=S’S’令ΔS=S’S’-SS=2ξm tgα-------------(15)2,齿廓变化(见图七)如图齿廓由白色齿廓变为青色齿廓. 齿廓外移(或内移)则造成齿轮啮合一系列性能变化可供我们选择(以后讨论)3,分离系数的产生.(图八所示是一对都为正移距齿的啮合的关系图)当(ξ1+ξ2)≠0时就会有(ξ1+ξ2)m≠ΔA=A’-A的现象.令(ξ1+ξ2)-ΔA/m=λ叫作分离系数如图D-D线------是齿条刀刀具的刀刃(红线所示)M-M线-----同是O1齿轮和O2齿轮作标准齿加工时的刀具分度线.(但不是加工节线)即为(图八)中的MM在此线上刀具的齿厚=刀具的齿槽宽∵O1和O2两齿轮都作正移距加工M1M1线-----是O1齿轮的加工时的节线,圆r1即O1齿的分度圆M2M2线-----是O2齿轮的加工时的节线,圆r2即O2齿的分度圆法线N1P1∥N2P2是两加工节点的压力角即分度圆压力角线r01,r o2 为基圆半径E1点和E2点----是刀刃在D-D加工位置同时用左右刀刃分别在切削O1和O2的齿廓E1点和E2点标(其中假设E1和P1是重合的.).由图,其总移距量和为(ξ1+ξ2)m,假定图中的中心距按O1O2= (r1+r2)+ (ξ1+ξ2)m, 令=A’’注意:如此时将刀刃D-D拿走则会发现O1和O2的齿廓并不接触.只有将中心距移近一点才能使O1和O2的齿廓作无齿隙啮合.这移近的距离称为分离值令=ΔA=λm λ称为分离系数∴结论:对于角变位齿轮付,两齿作无齿隙啮合时的中心距A’≠(r1+r2)+ (ξ1+ξ2)m,而是应为A’ =(r1+r2)+ (ξ1+ξ2)m-λm--------------(16)令(ξ1+ξ2)= ξ c 令(r1+r2)=A 代入(11)得A’=A+ξ c m-λm-----------------(17)λ值可推算得λ=((Z1+Z2)/2)((Cosα/ Cosα’)-1)-----------------(18)或可从手册中根据Z1和Z2查得相对分离系数σ0值σ0=λ/(Z1+Z2)-----------------(19)七,齿轮基本要素.(见图九)GB规定压力角为20°标准齿顶高系数为1其实质就是当齿数Z和模数m确定后为你划定了你所使用的渐开线的性质和使用此渐开线的区段.齿形移距是改变使用此渐开线的区段但不改变渐开线的性质.确定齿轮要素应按GB的规定,但测绘引进国外产品则按原机或原图基本要素: .(见图九)Z-----齿数r,或d---分度圆半径或直径,是与加工刀具作纯滚动的圆d=Z m--------------(20)m----是显示齿厚等齿轮尺寸大小的比例参数.它和齿形特征无关只和大小有机联系着m= d/Z------------------------(21)r’-----节圆半径,是一对齿啮合时作纯滚动的圆半径,单个齿不存在r’(见图五)r’= r b / Cosα’-------------------------------见前式(11)r b ---基圆半径- r b=r Cosα-----------------见前式(12)α-----刀具压力角,或称分度圆压力角.我国标准为20°α’----节圆压力角Cosα’=r b/r’--------------(不存单个齿在见图五)-见前式(9)h------齿全高= ha-+ hf- ------(22) GB规定ha-= m h-=2.25 mha----齿顶高(以分度圆为界)标准齿顶高ha-= m--------(23)h f----齿根高标准齿根高h f-=1.25--------------------24r a,- --d a,-----外径标准齿的外径d a,=d+2 ha------------------(25)r f- --d f,------根径标准齿的外径d f,=d+2 hf--------------------(26)p-----周节, 是在分度圆r上相邻齿廓的弧长p=πm-------见前(5)p b---基节是在基圆r b上相邻齿廓的弧长p b-= p Cosα---见前(7)标准齿分度圆弧齿厚S=πm-/2-------------------------------见前(6)移距后分度圆弧齿厚S=(6)式+(15)式=(πm-/2)+ 2ξm tgα---------(27)八, 齿轮齿厚测量计算齿厚测接触量参数有分度圆弦齿厚,S(如图九aq,或vb的弦长),固定弦齿厚,Sc(见图七AB)公法线长度W,量棒距M几种.∵当采用常规的齿轮卡尺来测量分度圆弦齿厚和固定弦齿厚时,其精度不高,在圆柱齿上少采用但近来开始应用光学仪器测量其精度较高但仍少用于生产线上.不过在直锥齿轮的齿厚测量中度圆弦齿厚和固定弦齿厚被广泛应用∴这里不讲了.此处只将公法线长度W,量棒距M的计公式. ∵W和M都是无基准测量(即以齿形本身为基准).很方便当精度亦很高∴被广泛应用1, 公法线长度测厚度(见图九),(1)如卡n个齿就有(n-1)个齿槽如图九卡2个齿有1个齿槽.2个齿,依此类推.(2) 公法线长度W=AB线,切于基圆. r b 切点在齿槽中心线(卡偶数齿)或齿厚中心线(卡奇数齿)(3) 弧齿厚S与公法线长度W的关系:所谓齿厚是指分度圆上的弧齿厚S,如图=a⌒q弧长.公法线长度AD实际上测的是n个基节齿厚+(n-1)个基节齿槽宽,即(n-1)个基节+1个基节齿厚. 公法线长度AD=基圆E⌒F弧长∴公法线长度AD与分度圆上的弧a⌒b弧长的关系即为基圆E⌒F弧长与分度圆上的弧a⌒b弧长的关系. 但它们不是简单地分度圆半径r与基圆半径r b的关系.根据公法线长度AD实际上测的是(n-1)个基节+1个基节齿厚由图九’(a)先看看可基节与周节的关系: 对比基节的夹角与周节的夹角,可见周节夹角在左侧少了个θ角则在右侧多了一个θ角∴它们的夹角都是(2π/Z) ∴基节与周节的关系亦就分度圆半径r与基圆半径r b的关系.再由图九’看看分度圆弧齿厚与基节厚的关系:由图可知基节的夹角比周节大2θ角∴它们不是简单的比例关系.当齿厚增加后,由图九’’可知由于移距后分度圆弧齿厚加厚,但绿色齿廓(移距后)和白色齿廓(移距前)其两厚度虽不同但其θ角是相同的∴新增加的分度圆弧齿厚ΔS与基节上增加的ΔS b之间的关系应是分度圆半径r与基圆半径r b的关系. 即ΔS b=ΔSCosα∵ΔS b=ΔW代入(15)式得ΔS b=ΔW=ΔSCosα=2ξm Sinα------------------------------(15)’这就是弧齿厚增量与公法线增量的关系式(4)W值只反映理论弧齿厚本身的厚度是不能反应当齿轮因变形产生椭圆或另件安装定位误差造成的径向跳动引起对某齿的分度圆直径变化所造成分度圆上的弧齿厚变化(可以九图为例)(5)能反应因加工分度误差造成的齿厚误差和机床主轴的定位误差所造成的齿厚误差(6)它能测量运动精度所要求的公法线长度变动量F W(7)W所测的厚度是所卡齿数的平均值不是某个单齿(8)公法线长度W的计算机公式由图九知公法线长度AD=E⌒H+H⌒F即一个基节t b-加一个基圆弧齿厚Sb,可以类推,如卡3个齿则公法线长度=二个基节t b-加一个基圆弧齿厚S b具体的公式推导省略有愿深入者可随时找我.标准齿的公法线长度W0公式W0=m Cosα(π(n-0.5)+Z invα)---------------------(28)式中n--------为所卡齿数,inv------是渐开线函数变位齿的公法线长度W公式∵由于变位造成的分度圆弧齿厚增量ΔS可由式(15)’ΔW=ΔSCosα=2ξm Sinα----------------------------(29)W= W0 +ΔW= W0 +2ξmSinα= m Cosα(π(n-0.5)+Z invα)+ 2ξmSinα---------------(30)对于斜齿轮只需将invα改为invαt即W= m Cosα(π(n-0.5)+Z invαt)+ 2ξmSinα----------(30)’αt为端面压力角tgαt=tgα/Cosβ式中β为螺旋角(8)所卡齿数n的计算. 当压力角α=20°时n≈0.1111Z+0.5---------------------------------------(31)2跨棒距M测量(见图十)(1)如图十跨棒距M就是量棒中心的尺寸OO’加量棒直经Dp 即M=OO’+dp------------------(32)(2)M的测量精度比公法线长度W高,亦是无基准测量(即以齿形本身为基准)∴检测方便(3)M是能用直接接触测量法测量内齿轮的唯一方法M能测量与基准无关的齿轮自身的椭圆度,不能反映几何偏心,加工偏心造成的齿形变化M所测出的齿厚是两个齿的平均齿厚值当压力角α=20°时,量棒直径大致为dp =1.476m---------------(33)(8) 计算无变位直齿标准齿轮M的步骤及其公式(a)先求出量棒中心点O’(或称量棒接触点)的压力角αM其公式为:invαM=invα±(dp/Zm Cosα) -/+(π/2Z)---------(34)斜齿: invαMt=invαt±(dp/Zm Cosα) -/+(π/2Z)-----(34)’注;在±和-/+中,分子用于外齿轮,分母用于内齿轮(b)求M值M= (Zm Cosα/Cos αM) ±dp (偶数齿)------------------(35)其中(Zm Cosα/ CosαM)即(32)式中的OO’斜齿: M= (Zm t Cosαt/Cos αMt) ±dp (偶数齿)------------------(35)’M= (Zm Cosα/ CosαM)( Cos(90°/Z))±dp (奇数齿)-------(36)斜齿: M=(Zm t Cosαt/CosαMt)( Cos(90°/Z))±dp (奇数齿)-------(36)(9) 计算变位非标准直齿轮M’的步骤及其公式(图十)(a)先求出量棒中心点O’的压力角αMinvαM=invα±(dp/Zm Cosα) -/+(π/2Z)+(2ξtgα/Z)-----(37)斜齿: invαMt=invαt±(dp/Zm Cosα) -/+(π/2Z)+(2ξtgα/Z)-(37)’(b) 求M’值: 同(35) (36)式至此我们可开始个种齿轮计算如何合理选取参数是一个综合性的问题等以后可作专题讲座.在我过去设计时都已编程20多程序. 现将常用几个程序给大家供参考只要将红色的参数输入即可得出结果数值.具体有:(计算程序中所使用的公式的符号是我自已常用得符号)1,成对齿轮验算2,单直齿求L(W)值,3单斜齿求L(W)值4,成对齿求L(W)值5,求M值(外斜齿)6求M值(内斜齿)7求任一点的弧齿厚。
creo齿轮渐开线曲线方程

creo齿轮渐开线曲线方程渐开线是指在齿轮啮合过程中,齿轮上任意一点的轨迹,也被称为齿轮曲面。
渐开线具有特殊的几何形态,使得齿轮在传动和运动过程中产生稳定和平滑的运动。
Creo(起初为Pro/ENGINEER)是一款由PTC公司开发的三维建模软件,广泛应用于机械设计和制造领域。
在Creo中,我们可以借助数学方程来定义齿轮的渐开线曲线。
一、齿轮渐开线曲线定义齿轮的渐开线曲线由齿数和齿轮尺寸确定。
Creo中的渐开线曲线方程如下:r = t / m - (1/m + B / m) * sin(t / m) + C,其中,r是渐开线曲线的半径,t是渐开线曲线的角度,m是齿数模数,B和C是与齿轮尺寸相关的常数。
二、参数的含义1. 齿数模数(m):齿数模数是齿轮的尺寸参数,它代表了齿轮齿数和齿轮的直径的比值。
齿数模数决定了渐开线曲线的形状。
一般情况下,齿数模数越大,渐开线曲线越平缓。
2. 常数B和C:常数B和C取决于齿轮的尺寸和几何特征。
它们可以通过齿轮的几何参数计算得出。
三、渐开线曲线的应用1. 传动平稳:齿轮的渐开线曲线可以使得齿轮之间的啮合更加平稳,降低传动过程中的噪声和振动。
这对于高精度和高速传动装置尤为重要。
2. 避免轴向力:渐开线曲线还可以帮助减小齿轮之间的轴向力,避免齿轮轴承的过早损坏。
这对于提高齿轮传动的寿命和可靠性有着重要的影响。
3. 改善齿轮效率:渐开线曲线可以减小齿轮的滚动摩擦,提高齿轮传动的效率。
总结:Creo软件提供了方便的功能来定义齿轮的渐开线曲线方程。
通过准确定义和计算齿轮的渐开线曲线,可以实现高效、稳定和精确的齿轮传动。
在实际的机械设计和制造过程中,掌握和应用齿轮渐开线曲线方程是非常重要的。
在使用Creo软件进行齿轮设计时,我们可以根据具体的齿轮参数来确定渐开线曲线方程,并进行相应的模拟和验证。
通过合理地选择齿轮渐开线曲线方程,可以提高齿轮传动的性能和可靠性。
渐开线曲线方程的应用不仅局限于齿轮设计,还可以在其他领域中使用。
渐开线齿轮几何参数学习总结

渐开线齿轮几何参数学习总结一.渐开线1.1 渐开线的形成一条动直线(发生线)沿着一个固定圆(基圆)作纯滚动时,和该动直线固连点的轨迹线称渐开线。
由图一可知,固连点在动直线上的位置可分为A ,B ,C 三种情况。
A 点的轨迹线称缩短渐开线;C 点的渐开线称延伸渐开线;若C 点与基圆圆心重合,则延伸渐开线演变成了阿基米德螺旋线;B 点的轨迹线称圆的渐开线,简称渐开线。
三种渐开线总称广义渐开线。
A BC发生线基圆图一 基圆的形成现在工业上常用的渐开线齿轮齿形是圆的渐开线。
如未特别说明,下面提到的渐开线均指此类渐开线。
1.2 与渐开线有关的各种名称(1) 基圆—直线在其上滚动的定圆称为渐开线的基圆。
基圆的半径与直径分别用b r ,b d 表示。
(2) 发生线—沿基圆作纯滚动的直线称为渐开线的发生线(3) 压力角—渐开线齿形上任意一点K 的受力方向线与速度方向线之间的夹角称为K 点的压力角(4) 渐开角—渐开线上任意一点K 的向量半径与渐开线的起点的向量半径之间的夹角1.3 渐开线的性质(1) 发生线沿基圆滚过的长度,等于基圆上被滚过的圆弧长度。
即:⌒AN KN(2) 渐开线上任一点的法线一定是基圆的切线。
(3) 同一基圆所生成的任意两条反向渐开线间的公法线处处相等。
(4) 发生线与基圆的切点N 是渐开线K 点曲率中心,而发生线NK 是渐开线上K 点的曲率半径。
渐开线离基圆越圆的部分,其曲率越小,即渐开线越平直,渐开线越靠近基圆,其曲率越大,即渐开线越弯曲,曲率半径越小。
(5) 渐开线的形状与基圆大小有关。
基圆半径相等则渐开线完全相同,基圆半径越小,则渐开线越弯曲,基圆半径越大,则渐开线越平直,基圆半径为无穷大时,则渐开线变为一条直线。
(6) 基圆内无渐开线。
A1A2B1B2N1N212图二 渐开线的公法线 1.4 渐开线的方程 (1) 渐开线的极坐标方程k k k inv k kb r kαααθα-===tan cos r(2)渐开线的直角坐标方程αθααθcos cos cos sin x b r kinv y b r ===图三1.5 基于MATLAB 的渐开线齿轮齿廓建模 (1)程序流程图:输入ra,m,z,x,alpha将每个齿形视为三部分求出每部分极角范围采用极坐标分别绘制每段齿形采用循环绘制Z个齿(2)源程序function y=getinvolute(ra,m,z,x,alpha)rb=m*z*cosd(alpha)/2;for theta=0:0.1:2*pipolar(theta,rb);endhold onalpha1=acos(rb/ra);theta1=tan(alpha1)-alpha1;for i=0:zfor alpha2=0:0.01:alpha1theta2=tan(alpha2)-alpha2;rx=rb/cos(alpha2);polar(theta2+2*i*pi/z,rx);endendhold onfaib=(pi+4*x*tand(alpha))/z+2*(tand(alpha)-alpha/180*pi); x1=ra*cos(theta1);y1=ra*sin(theta1);x2=ra*cos(faib-theta1);y2=ra*sin(faib-theta1);k=(y2-y1)/(x2-x1);b=y1-k*x1;for i=0:zfor theta3=theta1:0.001:(faib-theta1)rzx=b/(sin(theta3)-k*cos(theta3));polar(theta3+2*i*pi/z,rzx);hold onendendfor i=0:zfor alpha4=0:0.01:alpha1theta4=faib-(tan(alpha4)-alpha4);rx2=rb/cos(alpha4);polar(theta4+2*i*pi/z,rx2);endendhold onaxis tightend(3)渐开线生成实例利用程序绘制的齿数为20,齿顶圆半径为22,模数为2,变位系数为0,20的齿轮齿廓曲线如下:压力角为二.渐开线标准直齿圆柱齿轮的基本参数及几何计算2.1 齿轮的基本参数h,径向间隙齿轮的基本参数为:齿数Z,模数m,压力角α,齿顶高系数*a系数*c,根据上述基本参数可推算出齿轮的几何尺寸。
渐开线齿轮的完整齿廓曲线方程及精确建模

渐开线齿轮的完整齿廓曲线方程及精确建模一、引言在机械设计领域中,渐开线齿轮被广泛应用于传动装置中。
它具有传动平稳、传动比准确、噪音小等优点,因此备受青睐。
为了更深入地了解渐开线齿轮,我们需要探索其完整齿廓曲线方程及精确建模。
二、了解渐开线齿轮1.渐开线齿轮的概念渐开线齿轮是一种特殊的齿轮,其齿廓曲线定义为齿廓曲线上任意一点到齿轮轴线的距离,均等于该点切线方向与齿轮轴线之间的夹角的正切值乘以该点到轴线的距离。
这种设计使得渐开线齿轮在传动过程中具有更加稳定的性能。
2.渐开线齿轮的应用渐开线齿轮被广泛应用于各种机械传动装置中,如汽车变速箱、工业机械设备等。
其传动平稳、传动比准确的特点,使其在高速、大扭矩传动系统中具有重要的地位。
对其完整齿廓曲线方程及精确建模的研究具有重要意义。
三、渐开线齿轮的完整齿廓曲线方程1.齿廓曲线方程的推导渐开线齿轮的完整齿廓曲线是由渐开线和圆弧段组成的,因此其完整齿廓曲线方程可以分段推导。
在渐开线段上,齿廓曲线可以表示为直线段,而在圆弧段上,齿廓曲线可以表示为圆弧段。
将两者组合起来,即可得到渐开线齿轮的完整齿廓曲线方程。
2.完整齿廓曲线方程的数学表达根据上述推导过程,我们可以得到渐开线齿轮的完整齿廓曲线方程,该方程包含了渐开线段和圆弧段的数学表达式。
这个方程的推导过程相对复杂,但是对于深入理解渐开线齿轮的齿廓曲线具有重要意义。
四、渐开线齿轮的精确建模1.建立渐开线齿轮的三维模型在实际应用中,我们需要对渐开线齿轮进行精确建模。
建立渐开线齿轮的三维模型是一个复杂而重要的工作,需要结合完整齿廓曲线方程,使用CAD软件进行精确建模。
2.精确建模的意义精确建模能够帮助工程师更全面、准确地了解渐开线齿轮的结构和性能特点,有助于优化设计,提高传动效率和可靠性。
五、个人观点和理解对于渐开线齿轮的研究,我深刻地认识到它在机械设计中的重要性。
作为传动装置的核心部件,渐开线齿轮的完整齿廓曲线方程及精确建模对于提高机械传动系统的性能至关重要。
渐开线齿轮的画法

UG4.0中渐开线齿轮(花键)的画法利用UG中Curve模块和Expression模块直接绘制法:首先圆的渐开线公式为x=a(cost+t*sint)y=a(sint-t*cost)其中a为基圆半径,t为角度(弧度制)。
利用Expression将其转化为UG能识别的表达式形式。
这样就可以通过Curve中的Law Curve功能绘制渐开线。
例如:要绘制一个齿轮,参数如下分度圆直径=m*z=4×24=96齿顶圆直径=4×(24+2)=104齿根圆直径=4×(24-2.5)=86基圆直径=4×24×cos20=90.2分度圆齿槽角=360÷24÷2=7.5 方法:1、以齿顶圆直径绘制一圆,拉伸35厚。
2、建立表达式如下其中a为渐开线起始角度,b为终止角度,r为基圆半径,t为系统变量可取0——1不等。
u为弧度转换。
xt是变量x的函数表达式,yt是变量y的函数表达式。
3、插入曲线-规律曲线-【根据方程f(x):定义x、定义y;根据恒定值定义z,这里z坐标的变化规律为恒定值0(可根据情况任意确定)】,最后点确定。
生成渐开线如下图:4、插入曲线:分别以直径96(分度圆直径)、86(齿根圆直径)、105(比齿顶圆直径稍大)绘制圆。
再插入直线:以坐标原点和渐开线与分度圆的交点作直线。
最后通过<变换>将直线绕Z轴旋转复制-3.75度(齿槽角一半),将渐开线绕它镜像复制。
如图5、通过拉伸,选取刚绘制的齿槽截面,对实体进行裁剪,如图6、创建全部轮齿:插入/关联复制/实例/环形阵列,选取刚才建立的齿槽特征为对象,以15度为阵列角度,复制24个(包含原有的一个)。
如图,。
齿轮的齿形与渐开线机械原理.pptx

2
2
2
1
1
1
i1 2
1 2
t1 2
z2 z1
t2
360
zo z1
1
2 360 zo
z2
4 13
4
3
2
2
2
11
2 3
1
4
1
B2
A
C
4
D3
2
C
B
3
1
A
4
D
1
B2
A
C
4
D3
2
C
B
3
1
A
4
D
1 p34 p13
3
p14 p13
B 1
1
B2
A
C
4
D3
2
C
3
A
4
D
欲使两构件的角速比恒定,就必须 保证两定轴转动构件的相对速度瞬心 位置不变。
K
K
o rb
B
基 圆
2.渐开线方程式及渐开线函数 极坐标方程:
αk k vk
)
tanαk= BK/rb =AB/rb= rb(θk+αk)/rb θk =tanαk-αk
上式称为渐开线函数,用invαk 表示: θk =invαk =tanαk-αk 为使用方便,已制成函数表待查。 y 直角坐标方程:
v 解释:以微分的观点,当发生
线NK在当前位(置作二小)角度渐摆动开线的性质 k
发生线
(1)NK
=
N
时,等同于点k绕圆心N的转动 K0。
k
K
(2) 渐开线上任意一点的法线必切于基圆,切
d
Pk rk 渐开线
ProE中渐开线齿轮画法讲解

用从方程来生成渐开线的方法,创建渐开线,本章的第一小节分析了渐开线方程的相关知识。
(3)镜像渐开线
首先创建一个用于镜像的平面,然后通过该平面,镜像第2步创建的渐开线,并且用关系式来控制镜像平面的角度。
(4)拉伸形成实体
拉伸创建实体,包括齿轮的齿根圆实体和齿轮的一个齿形实体。这一步是创建齿轮的关键步骤。
齿轮传动是最重要的机械传动之一。齿轮零件具有传动效率高、传动比稳定、结构紧凑等优点。因而齿轮零件应用广泛,同时齿轮零件的结构形式也多种多样。根据齿廓的发生线不同,齿轮可以分为渐开线齿轮和圆弧齿轮。根据齿轮的结构形式的不同,齿轮又可以分为直齿轮、斜齿轮和锥齿轮等。本章将详细介绍用Pro/E创建标准直齿轮、斜齿轮、圆锥齿轮、圆弧齿轮以及蜗轮蜗杆的设计过程。
完成后的“关系”对话框如图3-25所示,在“关系”对话框内单击【确定】完成添加关系式;
图3-25“关系”对话框
6.创建齿形
(1)在工具栏内单击 按钮,或者依次在主菜单内单击 “插入”→ “拉伸”,弹出“拉伸”定义操控面板,在面板内单击 “放置”→ “定义”,弹出“草绘”定义对话框;
(2)选择“FRONT”面作为草绘平面,选取“TOP”面作为参考平面,参考方向为向“右”,如图3-26所示。单击【草绘】进入草绘环境;
图3-18“基准平面”对话框
(8)在绘图区单击选取刚刚创建的“DTM1”面作为参考平面,按住Ctrl键选取“A_1”轴作为参考。在偏距文本框内输入旋转角度为 “360/(4*z)”,系统提示是否要添加特征关系,单击 “是”;
(9)在“基准平面”对话框内单击【确定】,完成基准平面的创建;
(10)将关系式添加到“关系”对话框。在绘图区右键单击刚刚创建的基准平面“DTM2”,在弹出的快捷菜单上单击 “编辑”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
齿轮渐开线方程渐开线的形成原理:渐开线就像一个有破断点的圆形展开成一条直线的过程中,圆上的破断点运动的轨迹,如图所示,从破断点A展平到K点,运动轨迹AK就是渐开线的一段,继续展平可至B点或更远。
随着ω不断增大,渐开线曲率会越来越小,渐开线会越来越平直,如图所示。
渐开线方程的推理过程:如图所示,圆O为渐开线AB的基圆,半径为Rb,K为渐开线AB上的任一点;展平段KN为渐开线AB的发生线。
根据渐开线形成的原理可知,NO⊥NK,NK= N⌒A, ONK构成一个直角三角形。
以下过程将滚动角α(rad)作为已知变量进行推导:根据渐开线的形成原理可得N⌒A = NK,圆心角ω所对应的弧长:N⌒A =Rb*ω* PI /180, R=Rb/COS(α)。
先计算出OK与OX的夹角θ,根据渐开线函数公式θ=TAN(α)-α。
因为TAN(α)是N⌒A与Rb之比,相当于弧度值,所以此时α应换算为弧度值。
用PRO/E绘制方程曲线时,应将其转换为十进制角度。
即:θ=TAN(α)*180/PI-α,在PRO/E极坐标表示的方程中,θ用THETA表示。
A. 设α为压力角参数,将α用个人习惯的字母符号代替,如FAI。
设定一个参数值,如45°,即可写成:1. 压力角为参数“极坐标”表示的渐开线方程:FAI=T*45Rb=DB/2R=Rb/COS(FAI)THETA=TAN(FAI)*180/PI-FAIZ=0以上方程式是以压力角∠α作为变量参数。
若想使渐开线的长度控制在齿轮外径DW以内,就必须使渐开线K点与齿轮外径DW的边缘共线约束,可用∠α来控制。
因为齿轮的外径等于2*R=DW,基圆直径等于2*Rd=DB,渐开线K点与R的端点重合。
所以∠α应等于DB/DW的反余弦函数,即:∠α=ACOS(DB/DW),此角就可使渐开线K点落在齿顶圆边缘的位置。
将其作为变量代入方程,即可写成:2. 齿顶圆压力角为参数控制的“极坐标”表示的渐开线方程A:以ACOS(DB/DW)作为已知变量进行推导,方程如下:FAI=T*ACOS(DB/DW)Rb=DB/2R=Rb/COS(FAI)THETA=TAN(FAI)*180/PI-FAIZ=0如果方程式是以滚角∠ω作为变量参数。
若想使渐开线的长度控制在齿轮外径DW以内,就必须使渐开线K点与齿轮外径DW的边缘共线约束,可用∠ω来控制。
因为齿轮的外径等于2*R=DW,基圆直径等于2*Rd=DB,渐开线K点与R的端点重合,所以∠α应等于DB/DW的反余弦函数,即:∠α=ACOS(DB/DW),∠α的正切值再乘以180/PI就是渐开线K点在齿顶圆边缘的位置,即:∠ω=TAN(ACOS(2*Rb/DW))*180/PI。
将其作为变量代入方程,即可写成:3. 齿顶圆压力角为参数控制的“极坐标”表示的渐开线方程B:FAI=T*TAN(ACOS(DB/DW))*180/PIRb=DB/2R=Rb/COS(A TAN(FAI*PI/180))THETA=FAI-ATAN(FAI*PI/180)Z=0B.设ω为滚角参数,设定一个参数值,如45°,将ω用个人习惯的字母符号代替,如FAI。
根据“勾股定理”,极轴R的长度R=( Rb^2+NK^2)^0.5。
因式中NK= Rb*FAI*PI/180,将其代入。
即可写成:4. 滚角为参数的“极坐标”表示的渐开线方程:FAI=T*45Rb=DB/2R=(Rb^2+(Rb*FAI*PI/180)^2)^0.5THETA=FAI-ATAN(FAI*PI/180)Z=0如果设发生线长度NK等于基圆半径RB的倍率作为已知变量进行推导,渐开线的长度就以发生线长度与齿轮基圆半径的倍率来控制,改变倍率即可改变渐开线长度。
如设0.7作为倍率值,可写成:5. 发生线长度NK等于RB的正切函数为参数的“极坐标”表示的渐开线方程:Rb=DB/2NK=T*Rb*TAN(35)R=(Rb^2+NK^2)^0.5THETA=NK/Rb*180/PI-A TAN(NK/Rb)Z=0总结:A. 上述所有渐开线方程都是在“极坐标”方程表达式下建立的。
曲线的生成,离不开渐开线函数,渐开线函数θ=tan(α)-α,知道滚角或压力角其中之一,就能推算出另一个角度,从而推算出渐开线展角。
式中的α为弧度。
例压力角α=60°,则:tan(60)=1.7321,将其换算成弧度:60*pi/180=1.0472,于是渐开线函数:θ=1.7321-1.0472=0.6849(弧度)。
在PRO/E方程表达式中,应将弧度转换为十进制角度。
B.在PRO/E方程表达式中,如果参数α在方程中代表滚角,应将α转换成压力角,即:ATAN(α*PI/180),再用α- A TAN(α*PI/180),此角即是渐开线的展角。
如果参数α在方程中代表压力角,应将α转换成弧度即:TAN(α)*180/PI,再用TAN(α)*180/PI-α,此角即是渐开线的展角。
所以在转换过程中要根据∠α的性质确定。
C.在所有的“极坐标”渐开线方程表达式中,式1是最直接最简单的表达方法,公式简单,容易理解或记忆。
而直角渐开线方程式表达式比较繁琐,不容易理解或记忆,如以下两种方程式的比较:压力角为参数“极坐标”表示的渐开线方程1:FAI=T*45Rb=DB/2R=Rb/COS(FAI)THETA=TAN(FAI)*180/PI-FAIZ=0滚角为参数“笛卡尔”坐标表示的渐开线:A=T*45X=DB/2*COS(A)+DB/2*SIN(A)* A*PI/180Y=DB/2*SIN(A)-DB/2*COS(A)* A*PI/180Z=0所以创建齿轮模型时,如果对渐开线方程不熟悉,尽可能采用“极坐标”方程表达式:式1。
控制渐开线长度的方法:PRO/E渐开线方程都是以滚角或压力角作为变量作为参数来驱动。
渐开线的长度是由滚角或压力角的大小决定的,若想使渐开线的长度控制在设定的范围之内,就要控制渐开线的展开角度,调整滚角或压力角的角度值,使之控制在设定的范围之内,就需根据齿轮参数计算,比如:使渐开线的长度控制在齿轮外径DW 以内,就必须使渐开线K点与齿轮外径DW的边缘共线约束,可通过齿轮关系式推理,以下是两种变量参数的推理结果,将其作为参数变量即可。
㈠如果方程是以压力角作为变量作为参数来驱动,就要计算出压力角的大小。
因为齿轮的外径等于2*R=DW,基圆直径等于2*Rd=DB,渐开线K点与R的端点重合。
根据渐开线的形成原理,渐开线K点的压力角应等于DB/DW的反余弦函数。
即:压力角=ACOS(DB/DW)㈡如果方程是以滚角作为变量作为参数来驱动,就要计算出滚角的大小。
因为齿轮的外径等于2*R=DW,基圆直径等于2*Rd=DB,渐开线K点与R的端点重合。
根据渐开线的形成原理,渐开线K点压力角的反余弦函数“ACOS(DB/DW)”的正切值再乘以180/PI就是渐开线的滚角。
即:滚角=TAN(ACOS(2*Rb/DW))*180/PI参数化球面渐开线圆锥齿轮的实体建模参数:m=2.5,z=24,z1=45,a=20,b=20,bax=1,cx=0.2,x=0基准曲线的建立:大端球面渐开线:以默认的笛卡尔坐标为基准,用从方程功能建立基准曲线,有推导的渐开线方程在记事本中输入如下关系式:fia=t*70psai=fai*cos(alpha)*sin(delta)x=rx*(sin(fai)*sin(psai)+cos(fai)*cos(psai)*sin(theta))y=rx*(-cos(fai)*sin(psai)+sin(fai)*cos(psai)*sin(theta))z=rx*cos(psai)*sin(theta)小端球面渐开线:建立方法同大端,但球面半径rx变为rx-bc大端齿根圆:以默认的笛卡尔坐标为基准,用从方程功能建立基准曲线,方程关系式如下:x=bb1*cos(t*360)y=bb1*sin(t*360)z=ob1小端齿根圆:建立方法同大端,但半径bb1变为b2b3,x方向尺寸ob1变为ob3。
齿根过度曲线:用经过点建立过度曲线,分别有球面渐开线切平面与齿根圆相交得到的基准点与渐开线的端点相连,即可建立大小端基圆与齿根圆的过度曲线。
圆锥齿轮齿廓曲面的生成:1.单侧齿廓曲面的生成:用变截面扫描功能,以大端渐开线为原始轨迹,小端渐开线为辅助轨迹,大小端渐开线端点的连线为扫描曲线,即可建立理论的球面渐开线齿廓。
用边界混合工具,用过度曲线生成过度曲面,然后将建立的两曲面合并。
2.单个轮齿的齿廓生成:以大端分度圆所在平面1(建立时输入控制关系:距离=rx*cos(delta))与大端渐开线的交点建立基准点,过基准点和中心轴线建立基准平面2,然后再以此基准平面2过中心轴线旋转360/4*z就能得到齿廓的镜像平面3,将建立的齿廓曲面通过镜像后合并曲面,选择合并的方向就可得到单个轮齿齿廓曲面。
3.轮齿曲面的复制与阵列:建立的轮齿齿廓曲面,不能直接阵列,所以需要先将建立的轮齿曲面旋转复制,(建立时输入控制关系,旋转角度=360/z);再圆周阵列,(建立时输入控制关系,旋转角度=360/z,阵列个数z-1),得到全部齿廓曲面。
然后又大、小端齿根曲线与得到的全部吃廓曲面合并。
齿轮完成建模:由齿顶曲线和大、小端球面线做基准曲线绕中心轴旋转得到曲面。
得到的曲面与上步的齿廓曲面选择合并,即可得到完整的齿轮齿轮外形曲面。
然后将合并的曲面实体化就完成了齿轮模型的建立。
其它特征的参数设计:根据设计标准和强度计算,确定轴孔和键槽的尺寸参数。
参数化的球面渐开线圆锥齿轮的实体模型如图4所示:。