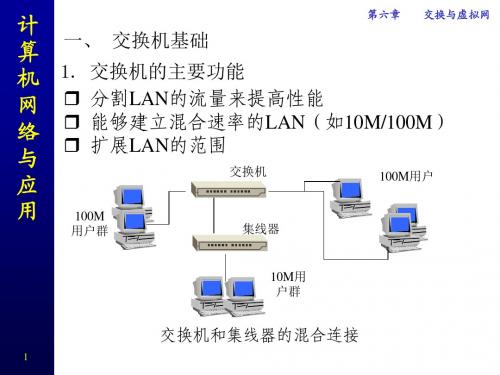
CH6
合集下载
CH6数显仪说明书

)仪表与2线制变送器电流信号的接线
A-S规格80×160尺寸的仪表(mm)
外形尺寸
开孔尺寸接线端子图
B-F规格96
外形尺寸
开孔尺寸接线端子图
开孔尺寸接线端子图
、
键调出当前参数的原设定值,闪烁位为修正位
通过键移动修改位,键增值、
键存入修改好的参数,自动转到下一参数。
键后将转到本组第
重复②
,直到显示
键进入修改状态,,,
密码在仪表上电时或
不松开,顺序进入各参数组,仪表显
键调出当前参数的原设定值,闪烁位为修改位
通过键移动修改位,键增值,
以符号形式表示参数值的参数,在修改时,闪烁位应处于末位。
重复④~ 以下为测量及显示相关参数,设置不正确,可能使仪表显示不正常。
、
种:
变送输出
变送输出有5个参数:
)——输出信号选择
,,
补偿前温度+
影响,该温度可能会高于室温。
在实际应用中,补偿导线接到输入端子,仪。
CH6 贷款业务(商业银行经营与供应链金融)

不良贷款的分类——“一逾两呆”分类: 1、逾期贷款是指借款合同到期未能归还的贷款。 2、呆滞贷款是指逾期超过一年期限仍未归还的贷款。 3、呆账贷款是指不能收回的贷款。
贷款五级分类与四级分类的区别:
五级分类是国际金融业对银行贷款质量的公认的标准,这 种方法是建立在动态监测的基础上,通过对借款人现金流量、 财务实力、抵押品价值等因素的连续监测和分析,判断贷款的 实际损失程度。能更准确地反映不良贷款的真实情况,从而提 高银行抵御风险的能力。
资金的规模和期限不同
票据贴现的金额一般不太大,每笔贴现业务的资金规模有限。票据的期 限较短,一般为2-4个月。然而贷款的形式多种多样,期限长短不一,规模 一般较大,贷款到期的时候,经银行同意,借款人还可继续贷款。
(三)按贷款用途分类
工业贷款
商业贷款 一是按部门分: 农业贷款
科技贷款
消费贷款等
二是按贷款具体用途划分
调高信用额度——当持卡人在半年以上保持
良好的信用记录,即“有借准时还”,并经常 把循环信用额度用满,积极的银行就会将持卡 人的循环信用额度调高,有的银行还有临时调 高额度的服务,当有如结婚、出国等临时需要 大笔用钱的时候,银行可以短期内调高持卡人 的循环信用额度。
(二)按贷款的保障条件分类
① 信用贷款
借款人无法足额偿还贷款本息,即使执行抵押或担保, 也肯定要发生一定的损失。
采取所有可能的措施和必要程序后,贷款仍无法回收。
这种分类方法是指银行主要依据借款人的还款能力,即最终 偿还贷款本金和利息的实际能力,确定贷款遭受损失的风险程度, 将贷款质量划分为正常、关注、次级、可疑和损失五类的一种管 理方法(其中后三类称为不良贷款)。
资金使用范围不同
持票人在贴现了票据以后,就完全拥有了资金的使用权,他可以根据自 己的需要使用这笔资金,而不会受到贴现银行和公司的任何限制。但借款人 在使用贷款时,要受到贷款银行的审查、监督和控制,因为贷款资金的使用 情况直接关系到银行能否很好地回收贷款。
贷款五级分类与四级分类的区别:
五级分类是国际金融业对银行贷款质量的公认的标准,这 种方法是建立在动态监测的基础上,通过对借款人现金流量、 财务实力、抵押品价值等因素的连续监测和分析,判断贷款的 实际损失程度。能更准确地反映不良贷款的真实情况,从而提 高银行抵御风险的能力。
资金的规模和期限不同
票据贴现的金额一般不太大,每笔贴现业务的资金规模有限。票据的期 限较短,一般为2-4个月。然而贷款的形式多种多样,期限长短不一,规模 一般较大,贷款到期的时候,经银行同意,借款人还可继续贷款。
(三)按贷款用途分类
工业贷款
商业贷款 一是按部门分: 农业贷款
科技贷款
消费贷款等
二是按贷款具体用途划分
调高信用额度——当持卡人在半年以上保持
良好的信用记录,即“有借准时还”,并经常 把循环信用额度用满,积极的银行就会将持卡 人的循环信用额度调高,有的银行还有临时调 高额度的服务,当有如结婚、出国等临时需要 大笔用钱的时候,银行可以短期内调高持卡人 的循环信用额度。
(二)按贷款的保障条件分类
① 信用贷款
借款人无法足额偿还贷款本息,即使执行抵押或担保, 也肯定要发生一定的损失。
采取所有可能的措施和必要程序后,贷款仍无法回收。
这种分类方法是指银行主要依据借款人的还款能力,即最终 偿还贷款本金和利息的实际能力,确定贷款遭受损失的风险程度, 将贷款质量划分为正常、关注、次级、可疑和损失五类的一种管 理方法(其中后三类称为不良贷款)。
资金使用范围不同
持票人在贴现了票据以后,就完全拥有了资金的使用权,他可以根据自 己的需要使用这笔资金,而不会受到贴现银行和公司的任何限制。但借款人 在使用贷款时,要受到贷款银行的审查、监督和控制,因为贷款资金的使用 情况直接关系到银行能否很好地回收贷款。
CH6虚拟网
端口2 (属VLAN3)
端口7
24
VLAN3 (1,2,7) VLAN4 (4,5,6)
终端Y
计 算 机 网 络 与 应 用
第六章
交换与虚拟网
VLAN的成员变化举例
例:根据前面已调整的VLAN,将终端X从vlan3迁移到 VLAN4 VLAN设备A VLAN1 (2,3,4,8)
终端X
端口1
端口4 (属VLAN1/2/3)
终端Y
计 算 机 网 络 与 应 用
第六章
交换与虚拟网
VLAN的成员变化举例-交换机A变化
VLAN设备A 终端X
端口1
端口4 (属VLAN1/2/3)
变化后: VLAN1 (2,3,4,8) VLAN1 (2,3,4,8) VLAN2 (1,4,5,6) VLAN2 (1,4,5,6) VLAN4 (1,4) VLAN3 (1,4)
校验
帧起始
目的 源MAC 类型 MAC地址 地址
数据
校验
存储转发
7
计 算 机 网 络 与 应 用
第六章
交换与虚拟网
三、 虚拟网(VLAN)
提供物理局域网流量控制的方法 由需要交换消息的系统组成 VLAN中的流量通常不会跨越界限 VLAN具有自己独立并唯一的标识 不同的VLAN可以共用同一个物理网络 需要支持VLAN的硬件设备
第六章
交换与虚拟网
经过修改后更有效的VLAN
VLAN设备A
终端X
端口1
端口4 (属VLAN1/2/3)
VLAN1 (2,3,4,8) VLAN2 (1,4,5,6) VLAN3 (1,4)
端口3 VLAN设备B (属VLAN1/2/3) 端口12 (属VLAN3) VLAN设备C
CH6 高频功率放大器

尖顶余弦脉冲的分解系数还可以根据的数值查表求出各分解系数的值。 尖顶余弦脉冲的分解系数还可以根据的数值查表求出各分解系数的值。 还可以根据的数值查表求出各分解系数的值
αn (θc ) =
Icmn 2 sinnθc cosθc − ncosnθc sinθc = ⋅ iCmax π n(n2 −1)(1− cosθc )
3)波形图分析vCE i 波形图分析
i
c
C
A
v BEmax= −VBB+Vbm
动态特性曲线、 动态特性曲线、工作路
iCmax
Icm
−θC θC
E E
B wt
截距
Icm cosθc
VCES
V0
VCC
vCE
v CE = VCC − vc
•Q
−θC
≈ VCC − I cm1 ( Z P ) w cos wt = VCC − Vcm cos wt
v
0
iC = g cr vCE
截止区 vCE
gc (vBE − VBZ ) iC = 0
vBE > VBZ vBE < VBZ
选取vBE为参变量是因为晶体管的输入电 压是正弦或是余弦, 压是正弦或是余弦,由于管子输入特性 的 非线性,所得的输入电流i 非线性,所得的输入电流 B就不是正弦或 余弦了,为了避免输入特性的非线性, 余弦了,为了避免输入特性的非线性,常 作参量测出输出特性。 以vBE作参量测出输出特性。 cxl1688@ 《高频电路》 第6章 高频电路》 章
1)波形图分析iC )波形图分析
截止区
ic
饱和区 过压区
ic
放大区 欠压区
iCmax
Icm
Ch6溶剂萃取3

1、料液;溶质;萃取剂;萃取相(萃 取液);萃余相(萃余液)
2、物理萃取;化学萃取
Light phase 萃取剂
杂质 溶质 原溶剂
Heavy phase
3、分配系数:在研究萃取过程中,常用 分配系数表示平衡的两个共存相中溶质
浓度的关系。衡量萃取体系是否合理的重 要参数。
对互不混溶的两液相系统中,达到萃取 平衡时有:
2、分离:(分离器):常用碟片式离心机 3、溶剂回收:(回收器)
根据料液与萃取剂的接触方式,萃取操作流程 可分为:
单级萃取:(混合——澄清式萃取)
多级错流接触萃取 多级萃取: 多级逆流接触萃取
微分萃取: (又叫塔式萃取)
二、理论收得率:
萃取操作理论收得率计算须符合两个假定: 很快达到平衡、溶质在两相中完全不互溶。
HLB值一般在 0~20之间。 ∴HLB值越大,亲水性越强,形成O/W型乳浊液; HLB值越小,亲油性越强,形成W/O型乳浊液; HLB的应用:
外
观
在水中分散 分散程度很低 剧烈震荡后得牛乳状分散液 稳定的牛乳状分散液 半透明到透明分散液 透明溶液
HLB范围
1~4 3~6 6~8 8~10 10~13 大于13
…②
μ °(E)、 μ °(R)—分别为溶质在萃 取相、萃余相中的标准化学位。
α1、α2—分别为溶质在萃取相、萃余相中 的活度。
R——气体常数 T——绝对温度
由①、②式得
μ°(E) +RTlnα1= μ°(R) +RTlnα2
1 2
u Ru E
=exp RT
(常数) ; 令 1 2
一、乳浊液的形成:
1、形成与类型:表面活性剂、乳化剂
①形成乳浊液的基本条件: ②类型:乳浊液 分散相 (内相):不连续相
2、物理萃取;化学萃取
Light phase 萃取剂
杂质 溶质 原溶剂
Heavy phase
3、分配系数:在研究萃取过程中,常用 分配系数表示平衡的两个共存相中溶质
浓度的关系。衡量萃取体系是否合理的重 要参数。
对互不混溶的两液相系统中,达到萃取 平衡时有:
2、分离:(分离器):常用碟片式离心机 3、溶剂回收:(回收器)
根据料液与萃取剂的接触方式,萃取操作流程 可分为:
单级萃取:(混合——澄清式萃取)
多级错流接触萃取 多级萃取: 多级逆流接触萃取
微分萃取: (又叫塔式萃取)
二、理论收得率:
萃取操作理论收得率计算须符合两个假定: 很快达到平衡、溶质在两相中完全不互溶。
HLB值一般在 0~20之间。 ∴HLB值越大,亲水性越强,形成O/W型乳浊液; HLB值越小,亲油性越强,形成W/O型乳浊液; HLB的应用:
外
观
在水中分散 分散程度很低 剧烈震荡后得牛乳状分散液 稳定的牛乳状分散液 半透明到透明分散液 透明溶液
HLB范围
1~4 3~6 6~8 8~10 10~13 大于13
…②
μ °(E)、 μ °(R)—分别为溶质在萃 取相、萃余相中的标准化学位。
α1、α2—分别为溶质在萃取相、萃余相中 的活度。
R——气体常数 T——绝对温度
由①、②式得
μ°(E) +RTlnα1= μ°(R) +RTlnα2
1 2
u Ru E
=exp RT
(常数) ; 令 1 2
一、乳浊液的形成:
1、形成与类型:表面活性剂、乳化剂
①形成乳浊液的基本条件: ②类型:乳浊液 分散相 (内相):不连续相
ch6分组交换技术
分组交换原理 §6.1 分组交换原理 二、X.25协议 协议 ITU-T X.25协议是关于专用电路连接到公用数据 协议是关于专用电路连接到公用数据 网上的分组数据终端设备(DTE)与数据电路终接设备 网上的分组数据终端设备 与数据电路终接设备 (CDE)之间的接口标准,是分组数据网中最重要的协 之间的接口标准, 之间的接口标准 议之一,为此,有时把分组数据网简称为X.25网。 议之一,为此,有时把分组数据网简称为 网 X.25协议内容涉及物理层、链路层和分组层 层。 协议内容涉及物理层、 协议内容涉及物理层 链路层和分组层3层 1. X.25协议结构 协议结构 X.25协议为公用数据网上以分组型方式工作的终 协议为公用数据网上以分组型方式工作的终 端规定了DTE和DCE之间的接口。DTE是用户设备相 之间的接口。 端规定了 和 之间的接口 是用户设备相 当于发往网路的数据分组的信源或接收网路发来的数 据分组的信宿,实际上它可以是一台主机、 据分组的信宿,实际上它可以是一台主机、前端处理 机和智能终端; 实际上是一种信号变换设备, 机和智能终端;DCE实际上是一种信号变换设备,把 实际上是一种信号变换设备 DTE定义的信号变换成适合在传输线路上传输的信号 定义的信号变换成适合在传输线路上传输的信号 形式,它可以是调制解调器、线路偶合器等。 形式,它可以是调制解调器、线路偶合器等。
分组交换原理 §6.1 分组交换原理 分组交换的优点: 分组交换的优点: 1. 向用户提供了不同速率、不同代码、不同同步 向用户提供了不同速率、不同代码、 方式、 方式、不同通信控制协议的数据终端之间能够相互通 信的灵话的通信环境。 信的灵话的通信环境。 2. 在网络轻负载情况下,信息的传输时延较小。 在网络轻负载情况下,信息的传输时延较小。 3. 实现线路动态统计复用,通信线路(包括中继线 实现线路动态统计复用,通信线路( 路和用户环路)的利用率很高, 路和用户环路)的利用率很高,在一条物理线路上可 以同时提供多条信息通路。 以同时提供多条信息通路。 4. 可靠性高。 可靠性高。 分组交换的缺点: 分组交换的缺点: 1. 由网络附加的传输信息较多,对长报文通信的 由网络附加的传输信息较多, 传输效率比较低。 传输效率比较低。 2. 技术实现复杂。 技术实现复杂。
ch6-激光放大特性

0
其中: P0 AI 0 Pl AI l Ps AI s 规律: Pl
G ,见图6.2.1。
2013-12-17
15
二、最大输出光强和最大输出功率 由于增益饱和,当输入信号光很强或放大器很长, 放大器增益系数会下降,净增益系数为0,光强不 再增加。此时对应的输出光强为最大。
目标:求 I l I 0 及 G G 0 (显式或隐式)
(1) 归一化输出光强
I l I 0
0 0 I l g H g H 1 I l I s 0 ln g H l ln 0 g H 1 I 0 I s I0
第六章
激光放大特性
一、引言 1、实际应用的需要 ①激光核聚变需要上万焦耳的激光能量 ②观察非线性光学需要功率强的激光 2、一般激光振荡器的缺陷 ①激光大能量大功率的获得要求工作物质的口径 和长度较大,或要求强的泵浦激励,易与相干性 好、发散角小等其它指标的高要求相矛盾。 ②能量和功率过高的激光在腔内来回往返传输 时,工作物质易遭到破坏。 3、实现高功率高能量的方法——激光放大器
0 Ps , , g H 主要靠泵浦增加
Pm l
16
2013-12-17
三、增益谱宽及输出谱线轮廓变窄 1、(无损)小信号均匀加宽光放大器
0 0 Gmax G 0 0 exp g H 0 l
G0
0 H
exp g l
2013-12-17
13
0 g H 、 、l 、I 、I 0 值,则可由式 可见,已知 s
(6.2.3)或 (6.2.4)求出输出光强及放大器增益。 (3) 两种特例 a、 当 0 时
其中: P0 AI 0 Pl AI l Ps AI s 规律: Pl
G ,见图6.2.1。
2013-12-17
15
二、最大输出光强和最大输出功率 由于增益饱和,当输入信号光很强或放大器很长, 放大器增益系数会下降,净增益系数为0,光强不 再增加。此时对应的输出光强为最大。
目标:求 I l I 0 及 G G 0 (显式或隐式)
(1) 归一化输出光强
I l I 0
0 0 I l g H g H 1 I l I s 0 ln g H l ln 0 g H 1 I 0 I s I0
第六章
激光放大特性
一、引言 1、实际应用的需要 ①激光核聚变需要上万焦耳的激光能量 ②观察非线性光学需要功率强的激光 2、一般激光振荡器的缺陷 ①激光大能量大功率的获得要求工作物质的口径 和长度较大,或要求强的泵浦激励,易与相干性 好、发散角小等其它指标的高要求相矛盾。 ②能量和功率过高的激光在腔内来回往返传输 时,工作物质易遭到破坏。 3、实现高功率高能量的方法——激光放大器
0 Ps , , g H 主要靠泵浦增加
Pm l
16
2013-12-17
三、增益谱宽及输出谱线轮廓变窄 1、(无损)小信号均匀加宽光放大器
0 0 Gmax G 0 0 exp g H 0 l
G0
0 H
exp g l
2013-12-17
13
0 g H 、 、l 、I 、I 0 值,则可由式 可见,已知 s
(6.2.3)或 (6.2.4)求出输出光强及放大器增益。 (3) 两种特例 a、 当 0 时
ch6 芳香烃
由于苯形成了一个环状π键,使6个碳-碳键、6个碳-氢键都 相同,其碳-碳键较烷烃中短,比烯烃中碳-碳双键长,导致 其性质与烷烃、烯烃都有较大区别,苯的这种难加成、难 氧化、易取代和苯环异常稳定的性质,被称为芳香性。
现在一般用
表示苯,表示苯中6个碳-碳键并无区别,
但是在研究取代反应历程时, 不如经典式 方便,故两种表示方法都在使用。
芳烃
11
凯库勒结构的优越性
利用凯库勒结构,可以解释: ① 苯为什么经催化加氢后得到环己烷?
H2/Pt
② 苯的一元取代产物为什么只有一种?
X
原因是苯的一元取代的两种可能
X
的产物结构,其实是完全相同的
结构。
芳烃
12
凯库勒结构的不足
① 凯库勒结构式实际上是环己三烯
则其中的“C-C”单键和“C=C”双键键长应不同,实测结 果在苯中所有的“C-C”键长均为0.140nm、“C-H”键长也 均为0.110nm,并很难进行加成或氧化反应,这与环己 三烯的性质的差别较大。
芳烃
16
1、价键理论
每个碳原子上剩有一个未参 与杂化的p轨道,其对称轴垂
H
120°
H
直碳环所在平面,并彼此平
行,于两侧相互交盖重叠, H
形成一个闭合的π键,这样处
H
于该π键中的π电子能够高度
离域,π电子云完全平均化,
分子能量降低,分子更稳定。
H 0.110 nm
0.140 nm
H
芳烃
17
价键理论
②六个π电子均进入成键轨道,且能量低于3个孤立的π键 。
2β
反键轨道
1β
1β
原子轨道
1β
乙烯 2个π 电子,共下降2 β 平均每个 π 电子下降1β
现在一般用
表示苯,表示苯中6个碳-碳键并无区别,
但是在研究取代反应历程时, 不如经典式 方便,故两种表示方法都在使用。
芳烃
11
凯库勒结构的优越性
利用凯库勒结构,可以解释: ① 苯为什么经催化加氢后得到环己烷?
H2/Pt
② 苯的一元取代产物为什么只有一种?
X
原因是苯的一元取代的两种可能
X
的产物结构,其实是完全相同的
结构。
芳烃
12
凯库勒结构的不足
① 凯库勒结构式实际上是环己三烯
则其中的“C-C”单键和“C=C”双键键长应不同,实测结 果在苯中所有的“C-C”键长均为0.140nm、“C-H”键长也 均为0.110nm,并很难进行加成或氧化反应,这与环己 三烯的性质的差别较大。
芳烃
16
1、价键理论
每个碳原子上剩有一个未参 与杂化的p轨道,其对称轴垂
H
120°
H
直碳环所在平面,并彼此平
行,于两侧相互交盖重叠, H
形成一个闭合的π键,这样处
H
于该π键中的π电子能够高度
离域,π电子云完全平均化,
分子能量降低,分子更稳定。
H 0.110 nm
0.140 nm
H
芳烃
17
价键理论
②六个π电子均进入成键轨道,且能量低于3个孤立的π键 。
2β
反键轨道
1β
1β
原子轨道
1β
乙烯 2个π 电子,共下降2 β 平均每个 π 电子下降1β
ch6生态系统服务和主要生态系统功能-PPT资料30页

03.12.2019
§2 森林生态系统
森林生态系统的分布规律 森林生态系统的主要特征 森林生态系统的功能 我国的森林资源现状
03.12.2019
森林生态系统分布规律
03.12.2019
森林生态系统的主要特征 生物种类多、结构复杂; 系统稳定性高; 物质循环的封闭程度高; 生产效力高。
第六章 生态系统服务与主要 生态系统功能
第一节 生态系统服务内容 第二节 生态系统服务功能价值及其评估 第三节 自然生态系统功能
03.12.2019
第三节 自然生态系统功能
§1 生态系统格局 §2 森林生态系统 §3 草原生态系统 §4 荒漠和苔原生态系统 §5 湿地生态系统 §6 水域生态系统
03.12.2019
§6 湿地生态系统
湿地生态系统的概念 湿地及其保护 中国湿地
03.12.2019
湿地生态系统的概念
湿地生态系统(wetland ecosystem): 是 指地表过湿或常年积水,生长着湿地植 物的地区。湿地是开放水域与陆地之间 过渡性的生态系统,它兼有水域和陆地 生态系统的特点,具有独特的结构和功 能。
草原退化的主要特征: 群落优势种和结构发生改变; 生产力低下,产草量下降; 草原土壤生态条件发生巨变,出现沙化(sandification)
和风暴; 固定沙丘复活、流沙在掩埋草场; 鼠害现象严重; 动植物资源遭破坏,生物多样性下降。
03.12.2019
草原生态环境恶化的原因
03.12.2019
中国湿地
近海及海岸 湿地
河流湿地 湖泊湿地 沼泽和沼泽
化草甸湿地 库塘
03.12.2019
§2 森林生态系统
森林生态系统的分布规律 森林生态系统的主要特征 森林生态系统的功能 我国的森林资源现状
03.12.2019
森林生态系统分布规律
03.12.2019
森林生态系统的主要特征 生物种类多、结构复杂; 系统稳定性高; 物质循环的封闭程度高; 生产效力高。
第六章 生态系统服务与主要 生态系统功能
第一节 生态系统服务内容 第二节 生态系统服务功能价值及其评估 第三节 自然生态系统功能
03.12.2019
第三节 自然生态系统功能
§1 生态系统格局 §2 森林生态系统 §3 草原生态系统 §4 荒漠和苔原生态系统 §5 湿地生态系统 §6 水域生态系统
03.12.2019
§6 湿地生态系统
湿地生态系统的概念 湿地及其保护 中国湿地
03.12.2019
湿地生态系统的概念
湿地生态系统(wetland ecosystem): 是 指地表过湿或常年积水,生长着湿地植 物的地区。湿地是开放水域与陆地之间 过渡性的生态系统,它兼有水域和陆地 生态系统的特点,具有独特的结构和功 能。
草原退化的主要特征: 群落优势种和结构发生改变; 生产力低下,产草量下降; 草原土壤生态条件发生巨变,出现沙化(sandification)
和风暴; 固定沙丘复活、流沙在掩埋草场; 鼠害现象严重; 动植物资源遭破坏,生物多样性下降。
03.12.2019
草原生态环境恶化的原因
03.12.2019
中国湿地
近海及海岸 湿地
河流湿地 湖泊湿地 沼泽和沼泽
化草甸湿地 库塘
03.12.2019
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第6章 直流电动机调速系统 章
由图6-15可知,正转时的电压和电流波形与不可逆PWM系统的相同。 当制动时,使PWM控制信号的占空比减小,使电枢两端的平均电压小于反 电动势。在反电动势的作用下,电流应沿虚线3流动,但由于V2截止,使能 耗制动电流通路受到限制,即所谓“受限”。此时电流应经D1、D4向电源 回馈能量,电机处于再生发电回馈制动状态。 轻载时,电枢电流出现断流现象,可以通过提高开关频率的方法来克服。 受限单极可逆PWM系统由于能避免开关管直通,提高了系统的可靠性,故 适用于大功率、大转动惯量、可靠性要 求高的电动机控制。
第6章 直流电动机调速系统 章
第6章 直流电动机调速系统 章
第6章 直流电动机调速系统 章
LMD18200的原理图如图 的原理图如图6-11。 的原理图如图 。 输入控制信号引脚:转向控制引脚3、使能控制引脚4及 引脚5。 输入控制信号引脚:转向控制引脚 、使能控制引脚 及PWM引脚 。逻辑 引脚 真值表如下表。 真值表如下表。 LMD18200有双极性驱动方式和单极性驱动方式,这两种方式的输入接法 有双极性驱动方式和单极性驱动方式, 有双极性驱动方式和单极性驱动方式 和理想波形如图6-12。 。 和理想波形如图 双极性驱动方式:PWM控制信号从引脚3输入。根据占空比来决定直流 电动机的转速和转向。 单极性驱动方式:PWM控制 信号从引脚5输入。而转向信号 从引脚3输入。 LMD18200与C8051接口的电路 与 接口的电路 如图6-13。 。 如图
第6章 直流电动机调速系统 章
电动机电枢电流分以下三种情况:
正转:电枢电流的方向从A到B,工作在正向电动状态; 反转:电枢电流的方向从B到A,反向电动状态; 轻载:电枢电流很小,其波形围绕横轴上下波动。电动机的工作状态呈 电动和制动交替变化。
第6章 直流电动机调速系统 章
双极性驱动时,电动机可在四个象限工作,低速时的高频振 荡有利于消除负载的静摩擦,低速平稳性好。但四个开关管都 处于开关状态,功率损耗较大,这种驱动方式只用于中小功率 直流电动机。
6.4.1 受限单极性驱动可逆 受限单极性驱动可逆PWM系统的控制原理 系统的控制原理 6.4.2 受限倍频单极性驱动可逆 受限倍频单极性驱动可逆PWM系统的控制原理 系统的控制原理 6.4.3 用单片机实现受限单极性控制
第6章 直流电动机调速系统 章
直流电动机是最早出现的电动机,也是最早能实现调速的电动机。 直流电动机长期占据调速控制的统治地位。 近年来,直流电动机的结构及控制方式发生了很多的变化。使用全 控型的电力电子器件进行PWM控制已成为绝对主流。 随着永磁材料和工艺的发展,产生永磁直流电动机。其体积小,结 构简单,省电,目前在中、小功率范围应用较广。 无刷直流电动机也是电子技术、电力电子技术及高性能永磁材料发 展的结果。其用电子换向器代替了直流电动机的机械换向器,避免 了直流电动机电刷和换向器接触不良造成的一系列致命弱点。 本章着重介绍用单片机和脉宽调制技术(PWM)对直流电动机进 行调速控制的各种方式和实现的方法。
6.3.2采用专用直流电动机驱动芯片 采用专用直流电动机驱动芯片LMD18200实现双极性控制 采用专用直流电动机驱动芯片 实现双极性控制
为避免同一桥臂两个开关管直通而引起短路, 为避免同一桥臂两个开关管直通而引起短路,两个开关在开与关交替时要 有死区时间。 有死区时间。 单片机的PWM口发出的 口发出的PWM脉冲没有死区设置功能,因此必须外接具有 脉冲没有死区设置功能, 单片机的 口发出的 脉冲没有死区设置功能 死区功能的芯片。 死区功能的芯片。 采用专用PWM信号发生器集成电路,如SG1731、UC3637等。 使用单片机的PWM口,外接含有死区功能和驱动功能的专用集成电路。 LMD18200是直流电动机专用驱动芯片。其功能如下: 是直流电动机专用驱动芯片。其功能如下: 是直流电动机专用驱动芯片 额定电流3A,峰值电流6A,电源电压55V; 额定输出电流2A,输出电压30V; 可通过输入的PWM信号实现PWM控制; 可通过输入的方向控制信号实现转向控制; 可以接受TTL或CMOS以及与它们兼容的输入控制信号; 可以实现直流电动机的双极性和单极性控制; 内设过热报警输出和自动关断保护电路; 内设防桥臂直通电路。
6.3 直流电动机双极性驱动可逆 直流电动机双极性驱动可逆PWM系统 系统
6.3.1 双极性驱动可逆 双极性驱动可逆PWM系统的控制原理 系统的控制原理 6.3.2 采用专用直流电动机驱动芯片 采用专用直流电动机驱动芯片LMD18200实现双极性控制 实现双极性控制
6.4 直流电动机单极性驱动可逆 直流电动机单极性驱动可逆PWM系统 系统
PWM 方向 使能 H桥输出状态 (引脚5) (引脚3) (引脚4) H H L H H L H L × H L × L L L H H H 正向电流 反向电流 两上桥臂导通 两上桥臂导通 两下桥臂导通 四桥臂同时关断
第6章 直流电动机调速系统 章
第6章 直流电动机调速系统 章
6.4 直流电动机单极性驱动可逆 直流电动机单极性驱动可逆PWM系统 系统
第6章 直流电动机调速系统 章
6.3 直流电动机双极性驱动可逆 直流电动机双极性驱动可逆PWM系统 系统
6.3.1 双极性驱动可逆 双极性驱动可逆PWM系统的控制原理 系统的控制原理
双极性驱动电路有两种:
T型: 由两个开关管组成,采用正负两个电源。这种方式开关管要承受 较高的反向电压,故只用于低压小功率直流电动机的驱动。 H型:其形状像“H”,也称桥式电路。
第6章 直流电动机调速系统 章
第6章 直流电动机调速系统 章
6.4.3 用单片机实现受限单极性控制
将PWM输出口定向到P0.0,通过P1.0发出转向控制信号,规定高电平代 表正转,低电平反转。
图6-17 单片机控制受限单极性可逆PWM系统原理图
第6章 直流电动机调速系统 章
本章小结
掌握直流电动机电枢的PWM调压调速原理。 改变占空比常用的方法及PWM控制信号产生的方法。 掌握有、无制动的不可逆PWM系统的控制原理及其与单片机 接口的方法。 掌握双极性驱动可逆PWM系统的控制原理。 掌握受限单极性驱动可逆PWM系统的控制原理及其与单片机 接口的方法。 掌握受限倍频单极性驱动可逆PWM系统的控制原理。 作业:6-1 6-2 6-5 6-6
H型双极性可逆PWM驱动系统组成如图6-8。 H型双极性可逆PWM驱动电路的输出电压U0
t1 T − t1 U0 = ( − )U S = (2α − 1)U S T T
(6-3)
1/2< α≤1,电动机正转;
0≤α < 1/2 ,电动机反转; α=1/2,U0=0,电动机不转。
第6章 直流电动机调速系统 章
第6章 直流电动机调速系统 章
6.4.2 受限倍频单极性驱动逆 受限倍频单极性驱动可逆PWM系统的控制原理 系统的控制原理
这种驱动方式是通过改变对开关管的控制方式,使电枢脉冲电压的频率比 PWM控制信号频率高一倍,这样可以避免受限单极性驱动的电流断续问题。 正转时,V1、V4接占空比和频率相同的PWM控制信号,只是这两路信号 相位相差1800,V2、V3加低电平截止。电枢电压是2倍于PWM控制信号频 率的脉冲波。 反转时,占空比和频率相同而相位相差1800的PWM信号加在V2、V3上, 而V1、V4截止,电枢电压波形如图6-16。 受限倍频单极性驱动方式的缺点是没有能耗制动能力;但是提高了电枢电 压频率,从而解决了断流问题,并且电枢电流的波动也减小了一倍,因此多 应用于大功率、可靠性要求较高的场合。
6.4.1 受限单极性驱动可逆 受限单极性驱动可逆PWM系统的控制原理 系统的控制原理
受限单极可逆PWM系统如图6-14。 正转时,V1加PWM控制信号,V4施加高电平,V2、V3加低电平截止。 反转时,V3加PWM控制信号,V2施加高电平,V1、V4加低电平截止。
6-14 受限单极性可逆PWM驱动系统
第6章 直流电动机调速系统 章
第6章 直流电动机调速系统
6.1 直流电动机电枢的 直流电动机电枢的PWM调压调速原理 调压调速原理 6.2 直流电动机的不可逆 直流电动机的不可逆PWM系统 系统
6.2.1 无制动的不可逆 无制动的不可逆PWM系统 系统 6.2.2 有制动的不可逆 有制动的不可逆PWM系统 系统