项目三-机器人运动指令
工业机器人操作与编程-机器人运动指令

02
目标位置通常由x、y、z坐标和旋 转角度(如俯仰角、偏航角)表 示。
姿态通常由机器人的关节角度表 示。
03
速度和加速度参数用于控制机器 人的运动速度和加速度,以确保
安全和精确的运动控制。
04
03
常见机器人运动指令解析
直线运动指令
总结词
使机器人沿直线移动的指令。
详细描述
直线运动指令用于控制机器人在两个点之间进行直线移动,通常需 要指定起点、终点和速度等参数。
其他领域
食品、化工、医药等行 业也广泛应用工业机器
人。
工业机器人的发展历程
第一代工业机器人
机械式手臂,只能执行简单的重复动 作。
第二代工业机器人
第三代工业机器人
智能机器人,具备感知、决策和执行 能力,能够适应环境变化和自主学习 。
可编程控制器,通过编程实现更复杂 的动作。
02
机器人运动指令基础
机器人编程语言概述
详细描述
插补运动指令用于控制机器人在两个或多个点之间进行平滑、连 续的运动,通常用于复杂轨迹的编程。
示例
CNC P1, P2, P3, V100, F10
姿态控制指令
总结词
控制机器人姿态的指令。
详细描述
姿态控制指令用于调整机器人的姿态,包括关节角度、工具姿态等 ,通常用于精确控制机器人的动作。
示例
工业机器人操作与编程-机 器人运动指令
汇报人: 202X-01-04
目 录
• 工业机器人概述 • 机器人运动指令基础 • 常见机器人运动指令解析 • 机器人编程实践 • 机器人操作安全注意事项
01
工业机器人概述
工业机器人的定义与分类
定义
ABB机器人~编程基本指令之运动指令

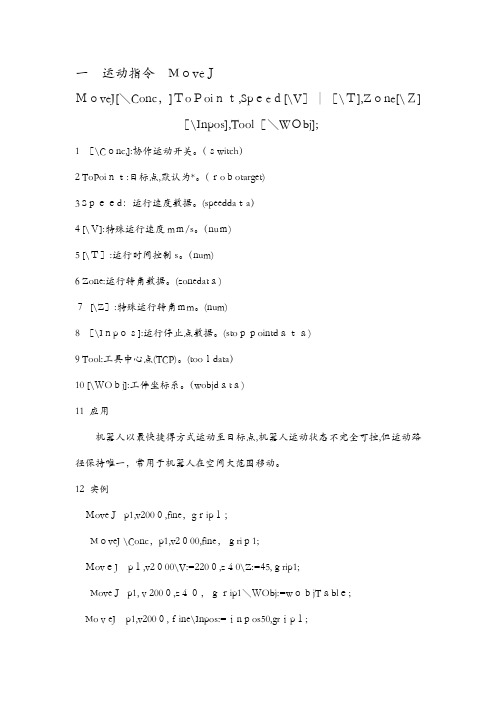
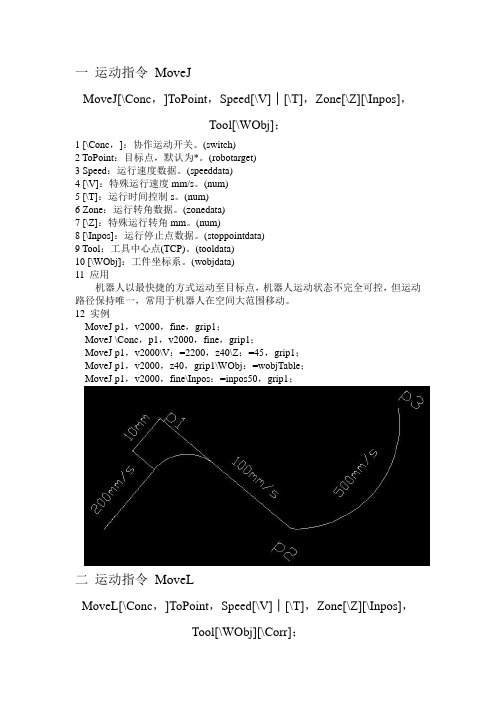
一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
(num)8 [\Inpos]:运行停止点数据。
(stoppointdata)9 Tool:工具中心点(TCP)。
(tooldata)10 [\WObj]:工件坐标系。
(wobjdata)11 应用机器人以最快捷的方式运动至目标点,机器人运动状态不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动。
12 实例MoveJ p1,v2000,fine,grip1;MoveJ \Conc,p1,v2000,fine,grip1;MoveJ p1,v2000\V:=2200,z40\Z:=45,grip1;MoveJ p1,v2000,z40,grip1\WObj:=wobjTable;MoveJ p1,v2000,fine\Inpos:=inpos50,grip1;二运动指令MoveLMoveL[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj][\Corr];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
项目3__机器人示教编程
软件系统应具有以下基本功能
1)示教信息输入; 2)工业机器人本体及对外部设备的动作控制; 3)运动轨迹在线修正; 4)实时安全系统等。
任务2 编辑程序
编辑程序包括修改位置点、编辑运动指令、添加指令, 程序语句的复制、粘贴及删除等。
一、修改位置点
修改位置点的步骤如下: 1)在主菜单中选程序编辑器。 2)单步运行程序,使机器人轴或外部轴到达希望修改
项目3 弧焊机器人示教编程
弧焊机器人焊接时是按照事先编辑好的程序来 进行的,这个程序一般是由操作人员按照焊缝 形状示教机器人并记录运动轨迹而形成的。
机器人的程序由主程序、子程序及程序数据构 成。在一个完整的应用程序中,一般只有一个 主程序,而子程序可以是一个,也可以是多个。
【学习目标】
知识目标
1.掌握常用的机器人指令; 2.掌握机器人程序的构成特点; 3.掌握机器人的程序编写和编辑方法;
技能目标
1.学会新建一个程序; 2.学会编辑程序,如程序的修改、复制、粘贴、删除
等; 3.能够实现程序的连续运行和单周运行。
任务1 新建和加载程序
机器人的程序编辑器中存有程序模板,类似计算 机办公软件的Word文档模板,编程时按照模板 在里面添加程序指令语句即可。
MoveL Offs(P1, 100, 50, 0),V100,fine,tool1 P3
MoveL Offs(P1, 0, 50, 0),V100,fine,tool1
P4
MoveL OffsP1,V100,fine,tool1
P1
(2)圆弧运动指令的应用 圆弧由起点、中点和终点三点确定,使用圆弧运
理。 硬件系统应配合其它软件完成以下模块功能:
ABB工业机器人编程与操作 (4)

移动程序:
MoveAbsJ p1,v800,z50,tool1;// P0→P1 MoveJ p2,v500,z30,tool1; // P1→P2 MoveL p3,v300,z30,tool1; // P2→P3 MoveL p4, v300\T:=10, z10, tool1; // P3→P4 MoveL p5, v100\T:=125, fine, tool1; // P4→P5 MoveL p6,v300,z30,tool1; // P5→P6 MoveJ p1,v500,fine,tool1; // P6→P1
终点的直线。
☞ 编程示例
MoveL p1,v500,z30,Tool1; // 使用系统预定义数据插补
MoveL p2, v1000\T:=5, fine\Inpos:=inpos20, tool1; // 直接指定移动时间和到位区间
❖ 圆弧插补 MoveC [\Conc,] CirPoint,ToPoint [\ID],Speed [\V]│[\T],Zone [\Z] [\Inpos],Tool [\Wobj] [\Corr] [\TLoad]; ➢ 用于机器人TCP圆弧移动; ➢ 机器人全部轴同步运动,TCP运动轨迹为连接起点、
工具偏移RelTool、程序偏移Offs等函数命令指定; ✓ * :通过手动示教操作指定目标位置。
➢ 移动速度 ✓ 数据类型为speeddata; ✓ 可使用系统预定义的速度v*、vrot*、vlin*; ✓ 可通过添加项\V或\T直接设定。
➢ 到位区间 ✓ 数据类型为zonedata; ✓ 可为系统预定义的区间z*、fine; ✓ 可通过数据添加项 \Z、\Inpos,直接指定到位允差、
机器人编程说明
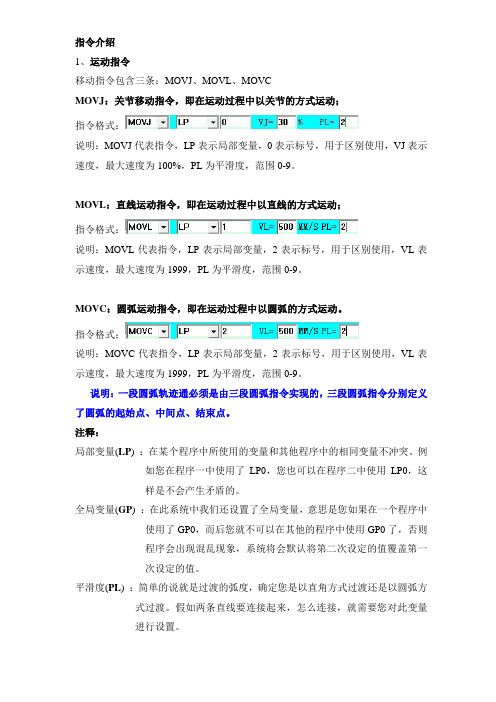
指令介绍1、运动指令移动指令包含三条:MOVJ、MOVL、MOVCMOVJ:关节移动指令,即在运动过程中以关节的方式运动;指令格式:说明:MOVJ代表指令,LP表示局部变量,0表示标号,用于区别使用,VJ表示速度,最大速度为100%,PL为平滑度,范围0-9。
MOVL:直线运动指令,即在运动过程中以直线的方式运动;指令格式:说明:MOVL代表指令,LP表示局部变量,2表示标号,用于区别使用,VL表示速度,最大速度为1999,PL为平滑度,范围0-9。
MOVC:圆弧运动指令,即在运动过程中以圆弧的方式运动。
指令格式:说明:MOVC代表指令,LP表示局部变量,2表示标号,用于区别使用,VL表示速度,最大速度为1999,PL为平滑度,范围0-9。
说明:一段圆弧轨迹通必须是由三段圆弧指令实现的,三段圆弧指令分别定义了圆弧的起始点、中间点、结束点。
注释:局部变量(LP) :在某个程序中所使用的变量和其他程序中的相同变量不冲突。
例如您在程序一中使用了LP0,您也可以在程序二中使用LP0,这样是不会产生矛盾的。
全局变量(GP) :在此系统中我们还设置了全局变量,意思是您如果在一个程序中使用了GP0,而后您就不可以在其他的程序中使用GP0了,否则程序会出现混乱现象,系统将会默认将第二次设定的值覆盖第一次设定的值。
平滑度(PL) :简单的说就是过渡的弧度,确定您是以直角方式过渡还是以圆弧方式过渡。
假如两条直线要连接起来,怎么连接,就需要您对此变量进行设置。
1、逻辑指令WAIT指令:条件等待指令。
指令格式:当您所设定的条件满足时,则程序往下执行;当您所设定的条件不满足时,则程序一直停在这里,知道满足您所设定的条件为止。
但是,后面还有一个时间的设定,当条件不满足时,在等待后面的设定时间之后,会继续执行下面的程序。
JUMP指令:条件跳转指令,包含无条件跳转指令和条件跳转指令两种类型。
格式一:无条件跳转指令格式二:条件跳转指令说明:在使用此条指令时,要配合使用标号指令。
公开课机器人运动指令

思考:Z值在工业生产中的意义
六、小结
起笔收笔回上方
开始结束在工作原点
合理使用 MoveLMoveJ
七、作业
八、拓展思考
观察指令: Move L P10 V100 Z50 tool1/Wobj1
Move L P20 V100
fine P10
tool1/Wobj1
50mm
50mm
100mm/s
Z值: 逼近但不到达
fine:精确到达
机器人手臂是怎样动的?有几种运动方式?
二、理论讲解
工业机器人在空间进行运动主要有四种方式,关节 运动(MoveJ),线性运动(MoveL),圆弧运动 (MoveC)和绝对运动(MoveABSJ)
二、理论讲解 1、线性运动指令 MoveL (1)直线 (2)讨论:工业 生产中用到该指 令的机器人操作 有哪些?
P10
直线运动路径
P20
生产实例
弧 焊
激 光 切 割
玻 璃 涂 胶
二、理论讲解
2、关节运动指令(Mo veJ) (1)不一定直线,路 径随机 (2)大范围运动,路 径要求不高,不易出 现奇异点 (3)讨论:工业生产 中用到该指令的机器 人操作有哪些?
P10
P20
关节运动路径
生产实例
码 放 货 物
搬 运 纸 箱
分 拣 牙 刷
两个轨迹区别
二、理论讲解
3、指令讲解
参数
MoveL
பைடு நூலகம்
含义
指令名称
P10,P20 目标点位置 v1000 z50 tool1 wobj1 运动速度(mm/s) 转弯区半径(mm) 工具坐标数据 工件坐标数据
ABB机器人~编程基本指令之运动指令
2Speed:运行速度数据。(speeddata)
3[\T]:运行时间控制s。(num)
4Zone:运行转角数据。(zonedata)
5Tool:工具中心点(TCP)。(tooldata)
6[\WObj]:工件坐标系。(wobjdata)
7Proc:例行程序名称。(string)
13 实例
MoveAbsJ p1,v2000,fine,grip1;
MoveAbsJ\Conc,p1\NoEOffs,v2000,fine,grip1;
MoveAbsJ p1,v2000\V:=2200,z40\z:=45,grip1;
MoveAbsJ p1,v2000,z40,grip1\WObj:=wobj1;
4[\T]:运行时间控制s。(num)
5Zone:运行转角数据。(zonedata)
6Tool:工具中心点(TCP)。(tooldata)
7[\WObj]:工件坐标系。(wobjdata)
8Proc:例行程序名称。(string)
9 应用
机器人通过中间点以圆弧移动方式运动至目标点,并且在目标点调用相应例行程序,在指令MoveC基础上增加例行程序调用功能。
4 [\T]:运行时间控制s。(num)
5 Zone:运行转角数据。(zonedata)
6 Tool:工具中心点(TCP)。(tooldata)
7 [\Wobj]:工件坐标系。(wobjdata)
8 Signal:数字输出信号名称。(signaldo)
9 Value:数字输出信号值。(dionum)
五 运动指令 MoveJDO
MoveLDO ToPoint,Speed[\T],Zone,Tool[\WObj],Signal,Value;
工业机器人常用的运动指令 -回复

工业机器人常用的运动指令-回复标题:工业机器人常用的运动指令详解在现代工业生产中,工业机器人已经成为不可或缺的一部分。
它们能够执行各种复杂的任务,提高生产效率,保证产品质量。
而这一切的基础,就是工业机器人所使用的运动指令。
以下我们将详细解析工业机器人常用的运动指令。
一、基础运动指令1. 直线运动指令(Linear Move):这是最基本的运动指令,用于指示机器人沿直线从一个位置移动到另一个位置。
该指令需要指定起点和终点的坐标,以及期望的运动速度和加速度。
2. 关节运动指令(Joint Move):与直线运动指令不同,关节运动指令是通过控制机器人的各个关节来实现运动的。
这种指令通常用于需要精确控制机器人姿态的情况。
3. 圆弧运动指令(Circular Move):该指令用于让机器人沿着圆弧路径移动。
需要指定圆弧的起点、终点和圆心坐标,以及期望的运动速度和加速度。
二、复合运动指令1. 平移运动指令(Translation Move):这是一种复合运动指令,用于让机器人在保持自身姿态不变的情况下,沿某个方向进行平移。
2. 旋转运动指令(Rotation Move):这也是一个复合运动指令,用于让机器人在保持自身位置不变的情况下,绕某个轴进行旋转。
三、特殊运动指令1. 点位运动指令(PTP Move):点位运动指令是指机器人从一个点快速移动到另一个点的运动方式,常用于需要快速定位的场合。
2. 连续轨迹运动指令(CP Move):连续轨迹运动指令是指机器人在运动过程中,其各关节的速度和加速度保持连续变化,从而使得机器人能够沿着平滑的轨迹运动。
3. 指定速度运动指令(Velocity Move):这种指令允许用户直接指定机器人的运动速度,而不是具体的运动路径。
机器人将根据这个速度信息自行计算出合适的运动路径。
四、高级运动指令1. 力控运动指令(Force Control):力控运动指令可以让机器人在执行任务时,能够感知并控制作用在其上的力,这对于需要精细操作的任务非常有用。
机器人现场编程-运动命令
一、运动命令- HMOVE
指令格式: HMOVE 位姿变量, 夹紧编号 功 能:移动机器人至指定位姿。机器人按混合运动方式运动:主要轴为
直线插补,腕关节为关节插补。 参 数:
位姿变量:指定机器人运动的目标位姿。(可以是变换值变量、复合变换值变量、 关节位移值变量或位姿信息函数)
夹紧编号:指定在目标位姿处要打开或闭合的夹紧编号。正数字闭合夹紧,负数 字打开夹紧。任何夹紧编号都设置到HSETCLAMP 命令(或辅助函数 0605)设置的最大值。如果省略,夹紧既不打开也不闭合。
即使未到达指定的位姿,机器人也会停止运动,并跳转到下一步骤。 参 数:
模式:(不是指定项)监视指定输入信号的上升沿或下降沿。正信号编号监视上升 沿,负编号监视下降沿。
/ERR :(选项)如果信号条件在监视开始之前已经置位,则会返回一个错误信息。 /LVL : (选项)如果信号条件在监视开始之前已经置位,则立即跳转到下一步骤。 位姿变量: 指定机器人运动的目标位姿(可以是变换值变量、复合变换值变量、关
#c
#e
C2MOVE #c
C1MOVE #d
#a
C2MOVE #e 圆弧 c、d、e
#d
一、运动命令-C1MOVE / C2MOVE
示例3:
LMOVE #p1 C1MOVE #p2 圆弧 p1、p2、p3
p2
p4
C1MOVE #p3 圆弧 p2、p3、p4
C2MOVE #p4
p1
p3
一、运动命令-HOME
运动命令
一、运动命令
基本运动命令 JMOVE 以关节(各轴)插补动作移动机器人 LMOVE 以直线插补动作移动机器人 C1MOVE 以圆弧插补动作移动 C2MOVE 以圆弧插补动作移动 HOME 移动到原点位姿 DELAY 停止机器人运动指定长度的时间
机器人基本指令

程序流程指令-TEST
TEST reg1 CASE 1: PATH 1; CASE 2: PATH 2; …… DEFAULT: Error; ENDTEST 测试 ( 数字 ) 变量, 数字变量值为 1, 执行 CASE 1 指令。 数字变量值为 2, 执行 CASE 2 指令。 数字变量值无法在 CASE 内找到相应值 执行 DEFAULT 内指令。
输入输出信号
DO-指机器人输出信号。 DI -指机器人输入信号。
机器人数字输入输出采用直流 24V 电源。 输入输出信号有两种状态。 – 1 ( High ) 为接通。 – 0 ( Low ) 为断开。 输入输出信号必须在系统参数中定义。
输出信号指令-Set
Set do1;
do1:输出信号名。 ( signaldo ) 将一个输出信号赋值为 1,在输出信号名 相应 I/O 板的相应信号端口输出直流 24V 电压。
( num ) ( All ) ( Same as Data )
( bool ) ( num ) ( string ) ( robotarget )
负载定义指令-GripLoad
GripLoad load0;
load0:机器人负载数据。 设置机器人当前负载。
( num )
计数指令-Add
Add Name, AddValue;
输入信号指令-WaitDI
WaitDI di1, 1\MaxTime:=5\TimeFlag:=flag1; 如果只选用参变量 [\MaxTime],机器人等待 超过最长时间后,机器人将停止运行,并显 示相应出错信息或进入机器人错误处理程序 ( Error Handler )。 如果同时选用参变量 [\MaxTime] 与参变量 [\TimeFlag],等待超过最长时间后,无论是 否满足等待的状态,机器人将自动执行下一 句指令。如果在最长等待时间内得到相应信 号,将逻辑量置为 FALSE,如果超过最长等 待时间,将逻辑量置为 TRUE。
工业机器人常用的运动指令
工业机器人常用的运动指令包括以下几种:
1. MoveL指令:用于机器人的直线运动,可以指定机器人末端的位置和朝向。
MoveL指令可以通过修改机器人的坐标系来实现不同的运动方向。
2. MoveJ指令:用于机器人的关节运动,可以指定机器人末端的角度和朝向。
MoveJ指令可以通过修改机器人的关节坐标系来实现不同的运动方向。
3. MoveR指令:用于机器人的旋转运动,可以指定机器人末端的角度和朝向。
MoveR指令需要指定旋转的方向和角度,可以使用欧拉角或者四元数来表示。
4. MoveAbsJ指令:用于机器人的绝对关节运动,可以指定机器人末端的角度和朝向。
MoveAbsJ指令需要指定机器人的初始位置和方向,可以通过机器人零点位置和方向来实现。
5. MoveAbsL指令:用于机器人的绝对直线运动,可以指定机器人末端的位置和朝向。
MoveAbsL指令需要指定机器人的初始位置和方向,可以通过机器人零点位置和方向来实现。
6. MoveRtJ指令:用于机器人的旋转关节运动,可以指定机器人末端的角度和朝向。
MoveRtJ 指令需要指定旋转的方向和角度,可以使用欧拉角或者四元数来表示。
7. MoveRtL指令:用于机器人的旋转直线运动,可以指定机器人末端的角度和朝向。
MoveRtL 指令需要指定机器人的初始位置和方向,可以通过机器人零点位置和方向来实现。
除了以上列举的运动指令外,还有一些特殊的运动指令,如MoveRtAbsJ指令、MoveRtAbsL 指令等,可以用于更复杂的机器人运动控制。
需要根据具体的应用场景选择合适的运动指令来实现机器人的运动控制。
机器人编程基本指令之运动指令

机器人编程基本指令之运动指令Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】一运动指令 MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
(num)8 [\Inpos]:运行停止点数据。
(stoppointdata)9 Tool:工具中心点(TCP)。
(tooldata)10 [\WObj]:工件坐标系。
(wobjdata)11 应用机器人以最快捷的方式运动至目标点,机器人运动状态不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动。
12 实例MoveJ p1,v2000,fine,grip1;MoveJ \Conc,p1,v2000,fine,grip1;MoveJ p1,v2000\V:=2200,z40\Z:=45,grip1;MoveJ p1,v2000,z40,grip1\WObj:=wobjTable;MoveJ p1,v2000,fine\Inpos:=inpos50,grip1;二运动指令 MoveLMoveL[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj][\Corr];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
ABB机器人-编程基本指令之运动指令
一运动指令MoveJMoveJ[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
(num)8 [\Inpos]:运行停止点数据。
(stoppointdata)9 Tool:工具中心点(TCP)。
(tooldata)10 [\WObj]:工件坐标系。
(wobjdata)11 应用机器人以最快捷的方式运动至目标点,机器人运动状态不完全可控,但运动路径保持唯一,常用于机器人在空间大范围移动。
12 实例MoveJ p1,v2000,fine,grip1;MoveJ \Conc,p1,v2000,fine,grip1;MoveJ p1,v2000\V:=2200,z40\Z:=45,grip1;MoveJ p1,v2000,z40,grip1\WObj:=wobjTable;MoveJ p1,v2000,fine\Inpos:=inpos50,grip1;二运动指令MoveLMoveL[\Conc,]ToPoint,Speed[\V]│[\T],Zone[\Z][\Inpos],Tool[\WObj][\Corr];1 [\Conc,]:协作运动开关。
(switch)2 ToPoint:目标点,默认为*。
(robotarget)3 Speed:运行速度数据。
(speeddata)4 [\V]:特殊运行速度mm/s。
(num)5 [\T]:运行时间控制s。
(num)6 Zone:运行转角数据。
(zonedata)7 [\Z]:特殊运行转角mm。
工业机器人常用的运动指令

工业机器人常用的运动指令工业机器人是一类能够完成各种任务的自动化机器人。
它们能够在工业生产线上执行各种动作和任务,提高生产效率和产品质量。
为了控制工业机器人的动作,我们需要使用运动指令。
在这篇文章中,我们将介绍工业机器人常用的运动指令。
1. 直线运动指令直线运动是工业机器人中最常见的一种运动。
直线运动指令告诉机器人以直线路径移动到特定的位置。
这种运动指令可以使用关节坐标或笛卡尔坐标系统来定义。
在关节坐标系统中,我们使用关节角度来定义机器人的位置。
在笛卡尔坐标系统中,我们使用位置和姿态来定义机器人的位置。
不管使用哪种坐标系统,直线运动指令都可以通过设置目标位置和速度来实现。
2. 圆弧运动指令除了直线运动,工业机器人也可以执行圆弧运动。
圆弧运动是通过定义圆心,起点和终点来描述的。
机器人将按照指定的圆心和半径在起点和终点之间沿圆弧进行运动。
该运动指令同样可以使用关节坐标或笛卡尔坐标系统来定义,并通过设置目标位置和速度来实现。
3. 轨迹运动指令轨迹运动指令用于描述机器人运动的轨迹。
它们可以通过一系列的位置点或路径来定义机器人的运动。
轨迹运动指令可以是直线轨迹,也可以是曲线轨迹。
这种运动指令通常使用笛卡尔坐标系统来定义,并可以通过设置目标位置和速度来控制。
4. 弧度运动指令在工业机器人中,角度是描述运动的重要参数之一。
弧度运动指令用于旋转机器人的关节或末端执行器。
我们可以使用关节角度或姿态角度来定义旋转角度。
该运动指令可以通过设定目标角度和速度来实现。
除了上述常用的运动指令,工业机器人还可以执行一些特殊的运动,如点对点运动、螺旋运动、搬运运动等。
这些运动指令使得机器人能够灵活地处理不同的工业任务,如装配、焊接、喷涂等。
需要注意的是,在编写机器人运动程序时,我们还需要考虑到安全因素。
安全是工业机器人运动的重要方面,我们需要确保机器人在执行任务时不会对人员或周围环境造成伤害。
因此,在编写运动指令时,我们需要设置安全边界、碰撞检测等功能来保证机器人的安全运行。
第14章 机器人运动指令

关节运动路径
ABB机器人运动指令
关于速度 速度一般最高只有 5000mm/s在手动限速状 态下,所有的运动速度 被限速在250mm/s
指令:MoveL p1, v200, z10, tool1\Wobj:=wobj1;
机器人的TCP从当前位置向p1点(图6-3)以线性运动方 式前进,速度是200mm/s,转弯区数据是10mm,距离p1点还有10mm
• 添加线性运动指令MoveL的操作
指令解析,如表6-2所示。
参数 p10
v1000 z50 tool1 wobj1
含义
目标点位置数据 定义当前机器人TCP在工件坐标系中的位置,通过单 击“修改位置”进行修改。 运动速度数据,1000mm/s 定义速度(mm/s)。 转角区域数据 定义转弯区的大小,单位:mm。 工具数据 定义当前指令使用的工具坐标。 工件坐标数据 定义当前指令使用的工件坐标。
• 指令:MoveJ p3, v500, fine, tool1\Wobj:=wobj1;
•
机器人的TCP从p2向p3点(图6-3)以关节运动方式
前进,速度是100mm/s,转弯区数据是fine,机器人在p3点停止,
使用的工具数据是tool1,工件坐标数据是wobj1。
关于转弯区 fine指机器人TCP达到目标点,
ABB机器人运动指令
• 添加线性运动指令MoveL的操作
4.点击“新建”。
ABB机器人运动指令
• 添加线性运动指令MoveL的操作
5.对目标点数据属性进行设定后,点击“确定”。
ABB机器人运动指令
• 添加线性运动指令MoveL的操作
6.*号已经被P10目标点变量代替。
7.点击“确定”。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
④常用于检查机器人零点位置,指令中TCP与Wobj只与运 行速度有关,与运动位置无关。。
运动指令- MoveAbsj
①选择“手动操纵”。
②确定已选定工具坐标与工件坐标 (注意事项:当再添加或修改机器 人的运动指令之前,一定要确认所 使用的工具坐标和工件坐标)。
运动指令- MoveAbsj
③选中<SMT>,开始添加指令。
运动指令- MoveL
特点
①机器人以线性方式运动至目标点。
②当前点与目标点两点决定一条直线,机器人运动状态可控。
③运动路径保持唯一,可能出现死点。
④常用于机器人在工作状态移动。
运动指令- MoveL
如图所示,添加两条【MoveL】指 令。
线性运动是机器人的TCP从起 点到终点之间的路径始终保 持为直线。一般如焊接、涂 胶等应用对路径要求高的场 合使用此指令。线性运动示 意如图所示:
机器人运动指令
主要内容
• 了解机器人运动指令的类型。 • 掌握不同指令的特点。 • 掌握不同指令的添加方法。
线性运动 (MoveL)
圆弧运动 (MoveC)
运动指令
绝对位置运动 (MoveAbsJ)
关节运动 (MoveJ)
运动指令- MoveC
特点 ①机器人通过中心点以圆弧移动方式运动至目标点。
④打开“添加指令”菜单。
运动指令- MoveAbsj
⑤选
【MoveAbsJ】指令指令解析如下:
参数
* \NoEOffs
V1000 Z50 Tool1
Wobj1
定义
目标点位置数据 外轴不带偏移数据 运动速度数据,1000mm/s 转弯区数据,转弯区的数值越大,机器人的动作越圆滑与流畅。 工具坐标数据 工件坐标数据
绝对位置运动指令是机器人的运动使用六个轴和外轴的角度值来定 义目标位置数据;MoveAbsJ常用于机器人六个轴回到机械原点的位置。
运动指令- MoveJ
特点
①机器人以最快捷的方式运动至目标点。
②机器人运动状态不完全可控。
③运动路径保持唯一。
④常用于机器人在空间大范围移动。
运动指令- MoveJ
如图所示,添加两条【MoveJ】指 令。
关节运动指令是在对路径精 度要求不高的情况下,机器 人的工具中心点TCP从一个位 置移动到另一个位置,两个 位置之间的路径不一定是直 线,关节运动示意如图所示:
运动指令- MoveJ
【MoveJ】指令指令解析如下:
参数
P10、p20 V1000
含义
目标点位置数据 运动速度数据
关节运动指令适合机器人大范围运动时使用,不容易在运动过程中 出现关节轴进入机械死点的问题。
②当前点.中间点与目标点三点决定一断圆弧,机器人运动状态可控。 ③运动路径保持唯一。 ④常用于机器人在工作状态移动。 ⑤限制:不可能通过一个MoveC指令完成一个圆。
运动指令- MoveAbsj
特点
①机器人以单轴运行的方式运动至目标点。
②绝对不存在死点,运动状态完全不可控。
③避免在正常生产中使用此指令。
总结
通过学习,了解机器人运动指令的类型,掌握不同运动指令的特点 和添加方法。