传感器中的弹性敏感元件汇总
合集下载
传感器的敏感材料与敏感元件介绍

3.2.1 温度敏感陶瓷材料
❖ 陶瓷温度传感器是利用陶瓷材料的电阻、磁性、介电、半 导等物理性质随温度而变化的现象制成的,其中电阻随温度 变化显著的称为热敏电阻。对热敏电阻的基本特性要求包括 有:①电阻率;②温度系数的符号与大小;③稳定性。
❖ 按热敏电阻的温度特性可分为负温度系数热敏电阻 (NTC),正温度系数热敏电阻(PTC)和临界温度电阻 (CTR)3类。
❖ 根据被测参数的功能类型来划分敏感材料。例如温度敏 感材料、压力敏感材料、应变敏感材料、光照度敏感材 料等。
❖ 按照材料的结构类型进行分类。该分类方法包括半导体 敏感材料、陶瓷敏感材料、金属敏感材料、有机高分子 敏感材料、光纤敏感材料、磁性敏感词材料等等。
3.1 半导体敏感材料及元件
❖ 传感器对半导体敏感材料最基本要求是换能效率高,即可 将其他形式能量转换为电能,且易制成器件。
图3-8 TiO2含量对电阻的影响
❖ 3 钙钛矿型结构陶瓷湿度敏感材料
钙钛矿型结构的化学通式为ABO3 ,具有钙钛矿结构的纳米 级复合氧化物陶瓷材料的表面、界面性质优异,对环境湿气 度化非常敏感,是湿度敏感材料发展的新方向。 BaTiO3晶体是较早被人们认识的铁电材料之一。BaTiO3具 有很好的湿敏性质,随着BaTiO3颗粒尺寸的减小,湿敏特 性提高,响应加快。
积的空隙中。间隙较小的
是氧四面体中心,为A位置,
间隙较大的则是氧八面体
位置,为B位置。
图3-6 两种结构类型
❖ (2) 典型的尖晶石结构陶瓷湿度敏感材料 纯MgCr2O4为正尖晶石结构,是绝缘体,不宜用作感湿材料。 当加入适量杂质,如MgO、TiO2、SnO2等;或在高温煅 烧,瓷体中呈现过量的MgO时, MgCr2O4即形成半导体。 图3-7表示MgCr2O4中添加受主 杂质MgO时对电阻率的影响。
弹性敏感元件

x 2
1 O F
4、弹性后效
当载荷从某一数值变化到另一 数值时,弹性元件不是立即完成相 应的变形,而是在一定的时间间隔 中逐渐完成变形,这一现象称为弹 性后效。如图所示,当作用在弹性 敏感元件上的力由零增加至F0时, 弹性敏感元件先变形至x1,然后在 载荷未改变的情况下继续变形到x0 为止。反之,如果力由减至零,弹 性敏感元件变形至x2,然后继续减 小变形,直到恢复原状为止。
弹簧管
弹性敏感元件
一、应力与应变 二、弹性敏感元件的特性 三、弹性敏感元件的类型
一、应与应变: l.应力
截面积为S的物体受到外力F的作用并处于平 衡状态时,物体在单位面积上引起的内力称为应 力,记作σ,其值为 F
a)正向应力:物体两端受拉力或压力 作用时,物体处于拉伸或压缩状态。 拉为正,压为负; b)切向应力:物体一端固定,另一端 受平行于端面的力作用时,内部任 意截面上产生大小相等、方向相反 的应力;图示方向的应力为正值, 反之为负值。
河 南 工 业 职 业 技 术 学 院 电 气 工 程 系
第2章
结构型传感器
掌握结构型传感器的基本特
性和工作原理、典型测量电路
了解其典型应用
结构型传感器
它们以机械力或磁场力作用下产生的位移为基础,通 过弹性元件或构件本身的变换可构成力、压力、加速
度、转矩、液位、流量等传感器,基本上属于结构型
dF K dx
弹性元件特性曲线
K
dF tan dx
2、灵敏度 灵敏度是弹性敏感元件在单位力作用下产生变形的 大小,即为刚度的倒数 ,用k表示。
dx k dF
3、弹性滞后 弹性元件在加、卸载的正反行 程中变形曲线是不重合的,这种现 象称为弹性滞后现象,如图所示。 曲线1和2所包围的范围称为滞环。 弹性滞后现象会给测量带来误差。
传感器中的弹性敏感元件(特性)
Chapter3 传感器中的弹性敏感元 件
引言
变形:物体在外力作用下,形状或尺寸的改变。 弹性变形 弹性元件:具有弹性变形特性的物体。 弹性敏感元件作用:把力、力矩或压力变换成相应的应变 或位移; 然后由各种转换元件,将被测力、力矩或压力转换成电量 。
1
h
弹性特性
作用在弹性敏感元件上的外力与其引起的相应 变形〔应
2.应变
物体受外力作用时产生的相对变形
纵向应变εl
横向应变εr 切应变:切应力所产生的变形。
8
h
式中, x为力F使角点产生位移, L为固定端至力作用点之间的距离
3.虎克定律与弹性模量
σ=Eε τ=Gγ
式中,E为弹性模量或称杨氏模量,单位为N/m2; G为剪切模量或称刚性模量; τ为切应力。
9
h
11
h
弹性敏感元件的类型 1.变换力的弹性敏感元件
图3-1 变换力的弹性敏感元件 a)实心轴 b)空心轴 c、d)等截面圆环 e)变形的圆环
12 f)等截面悬梁 g)等强度悬臂梁 h)变形的悬臂梁 i)扭h转轴
2.变换压力的弹性元件
图3-2 变换压力的弹性敏感元件
1a3)弹簧管
b)波纹管
c)等截面薄板
5.0 9.5~10.5
2.用于一般传感器
2.7
h
21
d)膜盒
e)薄壁圆简
f)薄壁半球
h
1、根本拉压 :材料受力变形的最根本形式是拉压变形, 由下式计算: E
式中:ε为应变,即单位长度的变形,
l l
因此它是一个
无量纲,习惯上将10-6称为一个微应变;Δl 是受力后发
生的变形,l为受载变形长度;E为材料的弹性模量,单位
引言
变形:物体在外力作用下,形状或尺寸的改变。 弹性变形 弹性元件:具有弹性变形特性的物体。 弹性敏感元件作用:把力、力矩或压力变换成相应的应变 或位移; 然后由各种转换元件,将被测力、力矩或压力转换成电量 。
1
h
弹性特性
作用在弹性敏感元件上的外力与其引起的相应 变形〔应
2.应变
物体受外力作用时产生的相对变形
纵向应变εl
横向应变εr 切应变:切应力所产生的变形。
8
h
式中, x为力F使角点产生位移, L为固定端至力作用点之间的距离
3.虎克定律与弹性模量
σ=Eε τ=Gγ
式中,E为弹性模量或称杨氏模量,单位为N/m2; G为剪切模量或称刚性模量; τ为切应力。
9
h
11
h
弹性敏感元件的类型 1.变换力的弹性敏感元件
图3-1 变换力的弹性敏感元件 a)实心轴 b)空心轴 c、d)等截面圆环 e)变形的圆环
12 f)等截面悬梁 g)等强度悬臂梁 h)变形的悬臂梁 i)扭h转轴
2.变换压力的弹性元件
图3-2 变换压力的弹性敏感元件
1a3)弹簧管
b)波纹管
c)等截面薄板
5.0 9.5~10.5
2.用于一般传感器
2.7
h
21
d)膜盒
e)薄壁圆简
f)薄壁半球
h
1、根本拉压 :材料受力变形的最根本形式是拉压变形, 由下式计算: E
式中:ε为应变,即单位长度的变形,
l l
因此它是一个
无量纲,习惯上将10-6称为一个微应变;Δl 是受力后发
生的变形,l为受载变形长度;E为材料的弹性模量,单位
弹性敏感元件
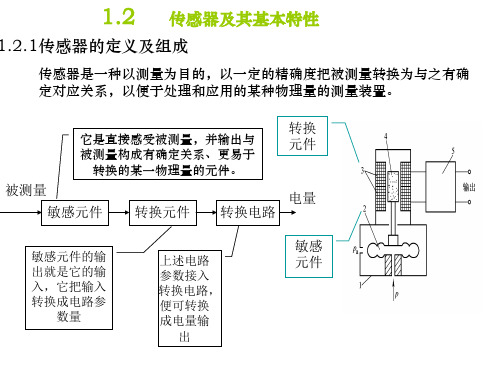
敏感元件的输 出就是它的输 入,它把输入 转换成电路参 数量
上述电路 参数接入 转换电路, 便可转换 成电量输 出
1.4.2传感器的分类
根据传感器工作原理分类 其中传感器的工作可靠性、静 态精度和动态性能是最基本的 要求
分 类 方 法
分类根据传感器能量转换情况 根据传感器转换原理分类 按照传感器的使用分类
1.2
传感器及其基本特性
1.2.1传感器的定义及组成
传感器是一种以测量为目的,以一定的精确度把被测量转换为与之有确 定对应关系,以便于处理和应用的某种物理量的测量装置。
它是直接感受被测量,并输出与 被测量构成有确定关系、更易于 转换的某一物理量的元件。
转换 元件
被测量 电量 敏感元件 转换元件 转换电路 敏感 元件
1、刚度 、 刚度是弹性元件受外 力作用下变形大小的量度
刚度也可以从弹性特性曲线上 求得。如图1-11所示曲线1上A 点的刚度,可过A点作曲线1的 切线,该切线与水平夹角的正 切代表该弹性元件在A点处的 刚度, 即 k=tanθ =dF/dx
2 灵敏度
通常用刚度的倒数表示弹性元件的特性,称为弹 性元件的灵敏度
1.4.3传感器的基本特性
1.线性度 所谓的线性度也称非线 性误差,是指传感器实 际特性曲线与拟合直线 (也称理论直线)之间 的最大偏差与传感器满 量程输出的百分比
2.迟滞 迟滞 传感器在正(输入量增大)反(输入量减 小)行程中输出输入曲线不重合称为迟滞 必须指出,正反行程的特性曲线是不重合 的,且反行程特性曲线的终点与正行程特 性曲线的起点也不重合。迟滞会引起分辨 力变差,或造成测量盲区,故一般希望迟 滞越小越好。 3.重复性 重复性 重复性是指传感器在输入按同一方 向作全量程连续多次变动时所得特 性曲线不一致的程度
第三章 传感器中的弹性敏感元件

金属波纹膜片
锡青铜、铍青铜、不锈 钢金属波纹膜片:感受 压力从几百帕到几十兆 帕,材料厚度可从 0.03mm到1.6mm,直 径从十余毫米到250毫 米,其压力位移特性可 以是线性的、渐增的或 渐减的,精度可达千分 之五。
压力膜盒
铍青铜、锡青铜, 不锈钢压力膜盒: 其压力位移特性 可以是线性的, 渐增的或渐减的, 精度可达千分之 三。
灵敏度结构系数β
F
AE
应变大小决定于: •圆柱的灵敏结构系数 •横截面积 •材料性质 •圆柱所承受的力 与圆柱的长度无关。
弹性圆柱(实心、空心)
固有频率
EA
f0 0.159 2l ml
f0
0.249 l
E
结论:
为了提高应变量,应当选择弹性模量小的材料,此时 虽然相应的固有频率降低了,但固有频率降低的程度 比应变量的提高来得小,总的衡量还是有利的。
从弹性特性曲线求得 刚度的方法
做切线 找夹角 求正切
k tan dF
dx
如果弹性元件的弹性 特性是线性的,则其刚 度为常数
第二节 弹性敏感元件的基本特性
灵敏度
灵敏度就是单位力产生变形的大小。 灵敏度是刚度的倒数,一般用Sn表示。
Sn
dx dF
弹性元件并联时
1
Sn n 1
圆形膜片和膜盒(圆形平膜片)
中心扰度与压力关系
PR4
Eh4
16 y
31 2
h
2 23 9 21 1
y
3
h
非线性
小扰度:
ymax
3 1 2
16 E
第3章A传感器中的弹性敏感元件详解

其中,F —作用在弹性元件上的外力; x —弹性元件产生的变形。
刚度也可从弹性特性曲线求得,如下图 所示,曲线的斜率即为弹性元件这某一 点的刚度。 dF tan 代表了弹性元件在某点处的刚度。 dx 若弹性元件的弹性特性是线性的,如曲
线1所示,则其刚度为一常数。 b. 灵敏度(Sn):弹性敏感元件的灵敏度为刚度的倒数。
圆形平膜片在均布载荷情况下应力分布如图所示。
在压力F作用下,中心最大挠度为:
y max
3 1 R 3 P 16 E h
2 2
(y max h)
P ——压力; R ——膜片的半径; h ——膜片的厚度; y ——膜片中心的最大挠度(位移)。
当
y max h 时,挠度与压力的关系具有下面的关系
F
A——圆柱的横截面积;——截面与轴线的夹角。
a. 在轴向(=0)产生的应力、应变为
F F 2 2 (cos sin ) A A F F 2 2 (cos sin ) AE AE
b. 在横向(=90o)产生的应力、应变为
F F 2 2 (cos sin ) A A F F 2 2 (cos sin ) AE AE
截面形状不同又可分为等截面梁和变截面(等强度粱)。
x
l
F
h
b
(1) 等截面梁 应变: x
6F (l x )
x
l
F
EAh
h
x ——距固定端为处的应变值
l ——梁的长度;
b
x ——某一位置到固定端的距离;
E ——梁的材料的弹性模量;
A——梁的截面积;h——梁的厚度。
刚度也可从弹性特性曲线求得,如下图 所示,曲线的斜率即为弹性元件这某一 点的刚度。 dF tan 代表了弹性元件在某点处的刚度。 dx 若弹性元件的弹性特性是线性的,如曲
线1所示,则其刚度为一常数。 b. 灵敏度(Sn):弹性敏感元件的灵敏度为刚度的倒数。
圆形平膜片在均布载荷情况下应力分布如图所示。
在压力F作用下,中心最大挠度为:
y max
3 1 R 3 P 16 E h
2 2
(y max h)
P ——压力; R ——膜片的半径; h ——膜片的厚度; y ——膜片中心的最大挠度(位移)。
当
y max h 时,挠度与压力的关系具有下面的关系
F
A——圆柱的横截面积;——截面与轴线的夹角。
a. 在轴向(=0)产生的应力、应变为
F F 2 2 (cos sin ) A A F F 2 2 (cos sin ) AE AE
b. 在横向(=90o)产生的应力、应变为
F F 2 2 (cos sin ) A A F F 2 2 (cos sin ) AE AE
截面形状不同又可分为等截面梁和变截面(等强度粱)。
x
l
F
h
b
(1) 等截面梁 应变: x
6F (l x )
x
l
F
EAh
h
x ——距固定端为处的应变值
l ——梁的长度;
b
x ——某一位置到固定端的距离;
E ——梁的材料的弹性模量;
A——梁的截面积;h——梁的厚度。
5-1 弹性敏感元件
当膜片边缘固定,膜片的一面受力时,膜片产生弯曲变形,因而 产生径向和切向应变。在应变处贴上应变片,就可以测出应变量, 从而可测得作用力F的大小。也可以利用它变形产生的挠度组成 电容式或电感式力或压力传感器。
二、弹性敏感元件的分类
4.悬臂梁式弹性元件 悬臂梁式弹性元件是一个一端固定,一端自由的弹性元件。 它的结构简单,加工方便,应变和位移较大,适用于测量l~5kN的 力。 当悬臂梁式弹性元件的自由端加有作用力时,梁产生弯曲,梁 的上表面拉伸,下表面压缩。由于它的表面各部位的应变不同,因 此应变片要贴在合适的部位,否则将影响测量的精度。
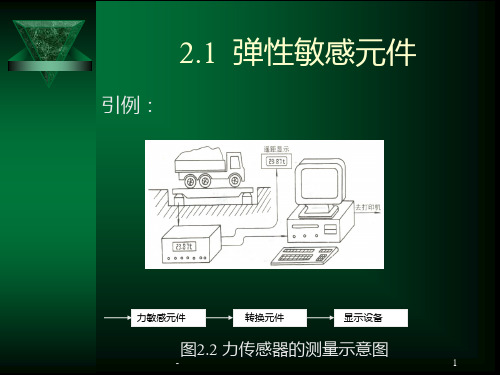
第五章 力传感器
第一节 弹性敏感元件
¤ 了解弹性敏感元件的定义、特性及分类
介绍
力是物理基本量之一,因此各种动态、静态力的大小的 测量十分重要。
力的测量需要通过力传感器间接完成,力传感器是将各 种力学量转换为电信号的器件。
F 力敏感 元件
转换 元件
显示 设备
力传感器的测量Leabharlann 意图介绍弹性敏感元件:可以把力或压力转换成应变或位移,然 后再由传感器将应变或位移转换成电信号。(P72)
二、弹性敏感元件的分类
(2)波纹管 波纹管是由许多同心圆环状皱纹的薄壁圆管构成,如下图所 示。波纹管可以将压力转换成位移量,主要用做测量和控制压 力的弹性敏感元件,由于其灵敏度高,在小压力和压差测量中 使用较多。
二、弹性敏感元件的分类
(3)波纹膜片和膜盒 平膜片在压力或力的作用下位移量小,因而常把平膜片 加工制成具有环形同心波纹的圆形薄膜,这就是波纹膜片。 其波纹形状有正弦形、梯形和锯齿形。
薄壁圆筒弹性敏感元件的结构
2.变换流体压力的弹性敏感元件 (1)弹簧管 当被测压力p增大时,弹簧管撑直,通过齿条带动齿轮转 动,从而带动电位器的电刷产生角位移。
二、弹性敏感元件的分类
4.悬臂梁式弹性元件 悬臂梁式弹性元件是一个一端固定,一端自由的弹性元件。 它的结构简单,加工方便,应变和位移较大,适用于测量l~5kN的 力。 当悬臂梁式弹性元件的自由端加有作用力时,梁产生弯曲,梁 的上表面拉伸,下表面压缩。由于它的表面各部位的应变不同,因 此应变片要贴在合适的部位,否则将影响测量的精度。
第五章 力传感器
第一节 弹性敏感元件
¤ 了解弹性敏感元件的定义、特性及分类
介绍
力是物理基本量之一,因此各种动态、静态力的大小的 测量十分重要。
力的测量需要通过力传感器间接完成,力传感器是将各 种力学量转换为电信号的器件。
F 力敏感 元件
转换 元件
显示 设备
力传感器的测量Leabharlann 意图介绍弹性敏感元件:可以把力或压力转换成应变或位移,然 后再由传感器将应变或位移转换成电信号。(P72)
二、弹性敏感元件的分类
(2)波纹管 波纹管是由许多同心圆环状皱纹的薄壁圆管构成,如下图所 示。波纹管可以将压力转换成位移量,主要用做测量和控制压 力的弹性敏感元件,由于其灵敏度高,在小压力和压差测量中 使用较多。
二、弹性敏感元件的分类
(3)波纹膜片和膜盒 平膜片在压力或力的作用下位移量小,因而常把平膜片 加工制成具有环形同心波纹的圆形薄膜,这就是波纹膜片。 其波纹形状有正弦形、梯形和锯齿形。
薄壁圆筒弹性敏感元件的结构
2.变换流体压力的弹性敏感元件 (1)弹簧管 当被测压力p增大时,弹簧管撑直,通过齿条带动齿轮转 动,从而带动电位器的电刷产生角位移。
传感器中的弹性敏感元

悬臂梁称重传感器 型号:SQB
灵敏度结构系数 悬臂梁自由端的挠度(位移)
等截面悬臂梁的固有振动频率 J ——梁的横截面的惯性矩, ——梁的单位长度的质量。
4、结论
等截面梁的厚度的减小可以使灵敏度提高,固有振动频率降低。材料的特性参数(E,)对灵敏度和固有频率都有影响。
二、变截面梁(等强度粱)
薄壁圆筒的灵敏度结构系数 薄壁圆筒的固有振动频率为
——力矩; ——扭转棒圆半径; ——横截面对圆心的极惯性矩; ——扭转棒直径。 在力矩测量中常常用到扭转棒,当棒端承受力矩 时,在棒表面产生的最大剪切应力为 最大剪应力与作用的力矩成正比,而与其横截面的极惯性矩和半径之比成反比。
单位长度的扭转角
G为扭转棒材料的剪切弹性系数。
表明单位长度扭转角与扭矩 成正比,而与 抗扭刚度成反比。
——轴向集中作用力; ——工作的波纹数; ——波纹管内半径处的壁厚,即毛坏的厚度。 ——波纹管的外半径; ——波纹管的内半径; ——波纹管的圆弧半径。 ——波纹平面部分的斜角(又叫紧密角) ——相邻波纹的间隙。
波纹管的轴向位移与轴向作用力之间关系可表示为
——取决于K参数和m的系数。 计算K和m出后,可由图表查得 。
——抗扭刚度
扭转棒长度为l时的扭转角为
在与轴线成45o度角的方向上出现最大垂直应力 ,其数值与最大剪切应力 相等,即 这时最大应变为
3.4.4 圆形膜片和膜盒
圆形膜片分平面膜片和波纹膜片两种。在相同压力情况下,波纹膜片可产生较大的挠度。 一、圆形平膜片 圆形平膜片在均布载荷情况下应力分布如图所示。在压力F作用下,中心最大挠度为: ——压力; ——膜片的半径; ——膜片的厚度; ——膜片中心的最大挠度(位移)。
引言
灵敏度结构系数 悬臂梁自由端的挠度(位移)
等截面悬臂梁的固有振动频率 J ——梁的横截面的惯性矩, ——梁的单位长度的质量。
4、结论
等截面梁的厚度的减小可以使灵敏度提高,固有振动频率降低。材料的特性参数(E,)对灵敏度和固有频率都有影响。
二、变截面梁(等强度粱)
薄壁圆筒的灵敏度结构系数 薄壁圆筒的固有振动频率为
——力矩; ——扭转棒圆半径; ——横截面对圆心的极惯性矩; ——扭转棒直径。 在力矩测量中常常用到扭转棒,当棒端承受力矩 时,在棒表面产生的最大剪切应力为 最大剪应力与作用的力矩成正比,而与其横截面的极惯性矩和半径之比成反比。
单位长度的扭转角
G为扭转棒材料的剪切弹性系数。
表明单位长度扭转角与扭矩 成正比,而与 抗扭刚度成反比。
——轴向集中作用力; ——工作的波纹数; ——波纹管内半径处的壁厚,即毛坏的厚度。 ——波纹管的外半径; ——波纹管的内半径; ——波纹管的圆弧半径。 ——波纹平面部分的斜角(又叫紧密角) ——相邻波纹的间隙。
波纹管的轴向位移与轴向作用力之间关系可表示为
——取决于K参数和m的系数。 计算K和m出后,可由图表查得 。
——抗扭刚度
扭转棒长度为l时的扭转角为
在与轴线成45o度角的方向上出现最大垂直应力 ,其数值与最大剪切应力 相等,即 这时最大应变为
3.4.4 圆形膜片和膜盒
圆形膜片分平面膜片和波纹膜片两种。在相同压力情况下,波纹膜片可产生较大的挠度。 一、圆形平膜片 圆形平膜片在均布载荷情况下应力分布如图所示。在压力F作用下,中心最大挠度为: ——压力; ——膜片的半径; ——膜片的厚度; ——膜片中心的最大挠度(位移)。
引言
4.生物医学传感-电阻传感器汇总

8:56 PM
11
压力膜盒
圆形膜片
金属波纹膜片
8:56 PM
12
环行金属波 纹管
波纹管柔性联轴器
8:56 PM 13
弹簧管压力表
8:56 PM
14
电子秤
8:56 PM
15
电子地磅
8:56 PM
16
第四章
电阻式传感器
8:56 PM
17
工作原理
基本工作原理是将被测物理量的 变化转换成传感元件电阻值的变化, 再经转换电路变成电量输出。 包括电位器式、压阻式、热阻式、 应变式等。 学习要点: 1. 应变式传感器:应变效应、电桥测量电路 和温度补偿原理 2. 压阻式传感器:压阻效应、测量桥路及温 度补偿
– 弹性敏感元件 – 弹性支承
常用的弹性敏感元件有:波纹管、弹性梁、柱及 筒、膜片、膜盒、弹簧管等。
8:56 PM 3
二、基本特性
弹性特性: 弹性特性可用刚度或灵敏度来表征。 1. 刚度 弹性敏感元件在外力作用下变形大小的量度, 一般用k表示,它的数学表达式为:
F dF k lim x 0 dx x
8:56 PM
电阻丝电阻温度系数1 0
t温度变化量0 C
C
36
2) 电阻丝材料与受力件材料的线膨胀系数不同,使电 阻相对变化为:
m t c t
Rt K m c t R
式中 βm-受力件材料的线膨胀系数; βc-电阻丝材料的线膨胀系数; K-应变片
l
与n有关,n越大, 越小
l n 10 20 则 1.6 0.4%
l
8:56 PM
35
传感器的弹性敏感元件-第三章.
柱形弹性敏感元件的固有频率:
EA
f0 0.159 2l ml
l — 柱体元件的长度 ml — 柱体元件单位长度的质量
(3.7)
ml A
f0
0.249 l
E
(3.8)
ρ — 柱体元件的材料密度
圆柱形弹性敏感元件主要用于电阻应变式拉力 或压力传感器中。
§3 弹性敏感元件的特性参数计算
2、悬臂梁 结构简单,灵敏度高,多用于较小力的测
5、固有振动频率 固有频率决定其动态特性,一般来说,固
有频率越高,其动态特性越好。
1k
f
(Hz )
2 me
(3.5)
k — 弹性敏感元件的刚度
与灵敏度相矛盾
me — 弹性敏感元件的等效振动质量
§3 弹性敏感元件的特性参数计算
1、弹性圆柱(实心和空心) 结构简单,可承受很大载荷;但产生的位移
很小,所以往往以应变作为输出量。
§3 弹性敏感元件的特性参数计算
6、波纹管
图3.12 波纹管
压力(或轴向力)的变化与伸缩量成比例, 所以波纹管可以把压力(或轴向力)变成位移。
§3 弹性敏感元件的特性参数计算
轴向作用力下,与波纹管的轴向位移的关系:
1 2
n
yF
Eh0
A0
A1
2 A2
B0
h0 2 RH 2
(3.24)
F — 轴向集中作用力 n — 工作的波纹数
具有弹性变形特性的物体。
§1 概述
弹性敏感元件: 利用弹性变形实现将被测量由一种物
理状态变换为另一种相应物理状态的元件。
作用:直接测量被测量
常用的弹性敏感元件有波纹管、弹性梁、 柱及筒、膜片、膜盒、弹簧管等。
EA
f0 0.159 2l ml
l — 柱体元件的长度 ml — 柱体元件单位长度的质量
(3.7)
ml A
f0
0.249 l
E
(3.8)
ρ — 柱体元件的材料密度
圆柱形弹性敏感元件主要用于电阻应变式拉力 或压力传感器中。
§3 弹性敏感元件的特性参数计算
2、悬臂梁 结构简单,灵敏度高,多用于较小力的测
5、固有振动频率 固有频率决定其动态特性,一般来说,固
有频率越高,其动态特性越好。
1k
f
(Hz )
2 me
(3.5)
k — 弹性敏感元件的刚度
与灵敏度相矛盾
me — 弹性敏感元件的等效振动质量
§3 弹性敏感元件的特性参数计算
1、弹性圆柱(实心和空心) 结构简单,可承受很大载荷;但产生的位移
很小,所以往往以应变作为输出量。
§3 弹性敏感元件的特性参数计算
6、波纹管
图3.12 波纹管
压力(或轴向力)的变化与伸缩量成比例, 所以波纹管可以把压力(或轴向力)变成位移。
§3 弹性敏感元件的特性参数计算
轴向作用力下,与波纹管的轴向位移的关系:
1 2
n
yF
Eh0
A0
A1
2 A2
B0
h0 2 RH 2
(3.24)
F — 轴向集中作用力 n — 工作的波纹数
具有弹性变形特性的物体。
§1 概述
弹性敏感元件: 利用弹性变形实现将被测量由一种物
理状态变换为另一种相应物理状态的元件。
作用:直接测量被测量
常用的弹性敏感元件有波纹管、弹性梁、 柱及筒、膜片、膜盒、弹簧管等。
1-4传感器中的弹性敏感元件资料

常用弹性材料: 合金钢、碳钢、铜合金和铝合金;
等截面轴(实心、空心)
特点:
结构简单 能承受很大载荷
用途:
电阻应变式拉力 或压力传感器
图 弹性圆柱
悬臂梁
一端固定一端自由的弹性敏 感元件,以应变或自由端的 位移作为输出量
特点
结构简单,
灵敏度高,
适于较小力的测量
根据梁的截面形状不同又可分为 等截面梁和变截面梁
压力膜盒
铍青铜、锡青铜, 不锈钢压力膜盒。
薄壁圆筒
弹性元件的壁厚一般都小于圆筒直径的1/20, 内腔与被测压力相通时,内壁均匀受压,薄 壁无弯曲变形,只是均匀的向外扩张。所以, 筒壁的每一单元将在轴线方向和圆周方向产 生拉伸应力。
电子秤
电子秤系统基本原理
悬臂梁称重传感器
扭转轴
常用于力矩测量
自由端收到转矩的作用时,扭转轴表面会 产生拉伸或压缩应变
弹簧管
又称波登管,它是弯曲成各种形状的空心管 子,大多数是C型弹簧管。
一端固定,另一端自由。在压力作用下,自 由端将产生位移。
弹簧管
弹簧管的一端连在管接头上,压力通过 管接头导入弹簧管的内腔,管的另一端 (自由端)封闭,并与传感器的其他部 分相连。在压力作用下,管子的截面改 变了形状,截面的短轴伸长,长轴缩短, 截面形状的变化导致弹簧管趋向伸直, 一直伸到与压力的作用相平衡为止(虚 线所示 )
当膜片的两面受到不同的压力(或力) 的作用时,膜片向压力低的一面应变 移动,使其中心产生与压力差成一定 关系的位移。膜片的 形式主要有平膜 片、垂链式膜片和波纹膜片三种。平 膜片又可按周边是否固定支撑、中心 是否开孔以及膜片区域受力分布状况 的不同等分为多种形式,其中最常用 的 是由周边固定的等截面圆形薄板构 成的平膜片。垂链式膜片由靠近边缘 处开槽的圆板构成,其弹性应变主要 发生在边缘环形槽处,常用这种膜片 压缩应变管或柱来达 到测压目的。垂 链式膜片的硬中心部分在受压移动时 接近平移,因此用于电容式传感器或 压电式传感器效果较好。波纹膜片压 有环状同心波纹。为了增加膜片中心 的 位移可把两个膜片焊在一起制成膜 盒或进一步把数个膜盒串接成膜盒组。
等截面轴(实心、空心)
特点:
结构简单 能承受很大载荷
用途:
电阻应变式拉力 或压力传感器
图 弹性圆柱
悬臂梁
一端固定一端自由的弹性敏 感元件,以应变或自由端的 位移作为输出量
特点
结构简单,
灵敏度高,
适于较小力的测量
根据梁的截面形状不同又可分为 等截面梁和变截面梁
压力膜盒
铍青铜、锡青铜, 不锈钢压力膜盒。
薄壁圆筒
弹性元件的壁厚一般都小于圆筒直径的1/20, 内腔与被测压力相通时,内壁均匀受压,薄 壁无弯曲变形,只是均匀的向外扩张。所以, 筒壁的每一单元将在轴线方向和圆周方向产 生拉伸应力。
电子秤
电子秤系统基本原理
悬臂梁称重传感器
扭转轴
常用于力矩测量
自由端收到转矩的作用时,扭转轴表面会 产生拉伸或压缩应变
弹簧管
又称波登管,它是弯曲成各种形状的空心管 子,大多数是C型弹簧管。
一端固定,另一端自由。在压力作用下,自 由端将产生位移。
弹簧管
弹簧管的一端连在管接头上,压力通过 管接头导入弹簧管的内腔,管的另一端 (自由端)封闭,并与传感器的其他部 分相连。在压力作用下,管子的截面改 变了形状,截面的短轴伸长,长轴缩短, 截面形状的变化导致弹簧管趋向伸直, 一直伸到与压力的作用相平衡为止(虚 线所示 )
当膜片的两面受到不同的压力(或力) 的作用时,膜片向压力低的一面应变 移动,使其中心产生与压力差成一定 关系的位移。膜片的 形式主要有平膜 片、垂链式膜片和波纹膜片三种。平 膜片又可按周边是否固定支撑、中心 是否开孔以及膜片区域受力分布状况 的不同等分为多种形式,其中最常用 的 是由周边固定的等截面圆形薄板构 成的平膜片。垂链式膜片由靠近边缘 处开槽的圆板构成,其弹性应变主要 发生在边缘环形槽处,常用这种膜片 压缩应变管或柱来达 到测压目的。垂 链式膜片的硬中心部分在受压移动时 接近平移,因此用于电容式传感器或 压电式传感器效果较好。波纹膜片压 有环状同心波纹。为了增加膜片中心 的 位移可把两个膜片焊在一起制成膜 盒或进一步把数个膜盒串接成膜盒组。
2.1--弹性敏感元件PPT课件
14
2.1 弹性敏感元件
(3)波纹膜片和膜盒
图2.6 波纹膜片波纹的形状
-
平膜片在压力 或力作用下位移量 小,因而常把平膜 片加工制成具有环 状同心波纹的圆形 薄膜,这就是波纹 膜片。其波纹形状 有正弦形、梯形和 锯齿形。
15
2.1 弹性敏感元件
(4)薄壁圆筒
圆筒的壁厚一般小于圆 筒直径的1/20,当筒内腔受 流体压力时,筒壁均匀受力, 并均匀地向外扩张,所以在 筒壁的轴线方向产生拉伸力 和应变。
-
12
2.1 弹性敏感元件
2. 变换压力的弹性敏 感元件
这类弹性敏感元件 常见的有弹簧管、波 纹管、波纹膜片、膜 盒和薄壁圆筒等。它 可以把流体产生的压 力变换成位移量输出。
-
图2.4 弹簧管的结构
13
2.1 弹性敏感元件
(2)波纹管
图2..5波纹管的外形
-
波纹管的轴向在流体 压力作用下极易变形,有 较高的灵敏度。在形变允 许范围内,管内压力与波 纹管的伸缩力成正比,利 用这一特性,可以将压力 转换成位移量。
2.1.2 弹性敏感元件的结构形式 弹性敏感元件在形式上可分为两大类 (1)将力转换为应变或位移的变换力
的弹性敏感元件; (2)将压力转换为应变或位移的变换
压力的弹性敏感元件。
-
8
2.1 弹性敏感元件
1. 变换力的弹性敏感元件
图2.3一些变换力的弹性敏感元件形状
(a)实心柱形 (b)空心圆柱形 (c)等截面圆环形 (d)变截面圆环形
量度,一般用k表示
k dF dx
F——作用在弹性元件上的外力; X——弹性元件产生的变形。
-
3
K dx dF
2.1 弹性敏感元件
2.1 弹性敏感元件
(3)波纹膜片和膜盒
图2.6 波纹膜片波纹的形状
-
平膜片在压力 或力作用下位移量 小,因而常把平膜 片加工制成具有环 状同心波纹的圆形 薄膜,这就是波纹 膜片。其波纹形状 有正弦形、梯形和 锯齿形。
15
2.1 弹性敏感元件
(4)薄壁圆筒
圆筒的壁厚一般小于圆 筒直径的1/20,当筒内腔受 流体压力时,筒壁均匀受力, 并均匀地向外扩张,所以在 筒壁的轴线方向产生拉伸力 和应变。
-
12
2.1 弹性敏感元件
2. 变换压力的弹性敏 感元件
这类弹性敏感元件 常见的有弹簧管、波 纹管、波纹膜片、膜 盒和薄壁圆筒等。它 可以把流体产生的压 力变换成位移量输出。
-
图2.4 弹簧管的结构
13
2.1 弹性敏感元件
(2)波纹管
图2..5波纹管的外形
-
波纹管的轴向在流体 压力作用下极易变形,有 较高的灵敏度。在形变允 许范围内,管内压力与波 纹管的伸缩力成正比,利 用这一特性,可以将压力 转换成位移量。
2.1.2 弹性敏感元件的结构形式 弹性敏感元件在形式上可分为两大类 (1)将力转换为应变或位移的变换力
的弹性敏感元件; (2)将压力转换为应变或位移的变换
压力的弹性敏感元件。
-
8
2.1 弹性敏感元件
1. 变换力的弹性敏感元件
图2.3一些变换力的弹性敏感元件形状
(a)实心柱形 (b)空心圆柱形 (c)等截面圆环形 (d)变截面圆环形
量度,一般用k表示
k dF dx
F——作用在弹性元件上的外力; X——弹性元件产生的变形。
-
3
K dx dF
2.1 弹性敏感元件
传感器中的弹性元件(共7张PPT)
在横向( α =90°)产生的应力、应变为:
σ =-μ F/A ; ε= -μ F/AE
柱形弹性元件的固有频率f0为:
f0 =(0.249/l) √E/ρ 3.4.2悬臂梁
(3-6)
一、等截面梁
x
F
x处的应变为:
εx=6F (l-x)/EAh (3-7)
悬臂梁自由端的挠度(位移)为:
l
h
y=4l³F/E bh³ (3-8)
第三章 传感器中的弹性敏感元件
3.1引言
弹性敏感元件:把被测参数由一种物理状态(如:力、力矩、 压力)变换为另一种所需要的相应物理状态(如::应变、 位移)
3.2弹性敏感元件的基本特性 3.2.1弹性特性
指作用在弹性敏感元件上的外力与其引起的相应变形之间的关系, 可由刚度或灵敏度表示
一、刚度 弹性敏感元件在外力作用下抵抗变形的能力,即:
F h
l
在压力P的作用下,中心最大挠度为:
ymax=3(1-μ²)R²P/16Eh³ (3-12)
在半径为r处膜片的应变值:
εr=3(1-μ²) (R²-3r³)P/8Eh (3-13)
2F圆弹0 性形敏感平元件的膜基本片特性的固有振动频率:
εr=3(1-μ²) (R²-3r³)P/8Eh (3-13)
第一页,共7页。
k = dF /dx (3-1)
式中:F—作用在弹性元件上的外力;
x—弹性元件产生的变形;
二、灵敏度
F
Sn= dx / dF (3-2) 3.2.2弹性滞后
F
x
F
Δx
x
第二页,共7页。
3.2.3弹性后效
F
F0 3.2.4固有振动频率
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
R4 Eh3
P
16
3(1 2 )
3(1 2 )16 NhomakorabeaR4 Eh3
P
3. 波纹膜片的选型依据 :
(1)膜片所受的力;(2)允许的迟滞误差;(3)所需要的特 性;(4)非线性度等。
4. 膜片有效面积的计算 :
对于平膜片(经验公式):
Ax
4
(R
r)2
对于波纹膜片(近似公式):Ax
3
(R2
Rr
r2)
最大应力;②所用材料的金相组织结构与化学成分;③弹性元件
的加工及热处理等。(分子间存在内摩擦)
解决弹性元件滞后和后效的方法主要有:①选取较大的安全
系数;②合理地选定机构和元件的连接方式,以减少应力集中;
③采用特殊合金,满足测量的要求等。
4. 有效面积Ax:
弹性元件把作用于其上的压力(压差)转化为集中力的能 力 5. 温。度Δ特P性(kg--/-c-m---2T)-越---大-F(,弹kg性) 模量降Ax低E=FPE0[1力 +B面 力t(t-积t0)] 面积
式中:R—膜片的工作半径;r —膜片的硬芯半径。
(二)波纹管 结构:波纹管是一种具有环形波纹的圆柱形薄壁管。
2. 工作原理及特点:
(1)工作原理:在轴向力的作用下波纹管将伸长或缩短;在横 向力的作用下波纹管将在轴向平面内弯曲。
(2)特点:波纹管在很大的变形范围内与压力具有线性关系, 有效面积比较稳定。波纹管的滞后误差较大,刚度较小。
量的比值在变形增量趋近于零时的极限称为弹性元件的刚度。
F
'
lim
0
F
dF
d
M
'
lim
0
M
dM
d
P'
lim
0
P
dP
d
当弹性元件具有线性特性(特性曲线上导数处处相等)时, 刚度即为一常数。这时,刚度就是弹性元件产生单位变形所需施 加的载荷量。因此,对线性弹性元件就有:
F' F
M' M
P' P
(2)灵敏度: 刚度的倒数称为灵敏度,也叫做柔度。
其总灵敏度为 :
n
j ji
i 1
如果把若干个刚度为Fi’ 的线性
弹性元件串联在一起使用,其
总刚度为 :
F'
1 n1
F i1 i
1
或:
n
1
F ' i1 F 'i
F
λ
λ1+λ2 λ1
3. 弹性滞后和弹性后效:
弹性滞后是指在弹性范围内, 弹性元件在加载与卸载时特 性曲线不重合的现象。
λ λ0
弹性后效是指载荷改变后,弹
jF
d
dF
jM
d
dM
jP
d
dP
同样,当弹性元件具有线性特性时灵敏度也为常数。其数值
等于单位载荷作用下弹性元件所产生的变形量。因此,对线性弹
性元件就有:
jF
F
jM
M
jP
P
弹性元件的刚度和灵敏度是两个完全等效的概念,可根据需
要和场合选用其一。
(3)组合线性弹性元件的刚度和灵敏度
① 并联线性弹性元件的刚度和灵敏度
(5)波纹膜片的特点:与平膜片相比,波纹膜片 的容许位移较大,即位移的线性区域较大; 灵敏度较高;工作更可靠。在外廓尺寸不大 时,可以得到较大的集中力——有效面积大; 适当选取波纹形状可以得到不同的输出特性。
(6)膜盒与膜盒组: 把两个膜片沿边缘焊接在一起制成膜盒。在输入 量相同的条件下,膜盒的输出位移比膜片增大近 一倍,提高了测量灵敏度。把几个膜盒首尾相连 构成膜盒组,相当于弹性元件的串联使用,同样 可使灵敏度大大提高。
j
1 F'
1
n
Fi '
i 1
1 n1 i1 ji
或:
1
n
1
j i1 ji
即并联线性弹性元件组成的系统总灵敏度 的倒数等于每个元
件灵敏度的倒数之和。
F
F
用并联线性弹性元件
的方法组成所需非线性
特性的弹性元件。
λ
② 串联线性弹性元件的刚度和灵敏度
如果把若干个灵敏度分别为ji的
F
线性弹性元件串联在一起使用,
第三章 传感器中的弹性敏感元件
一.弹性元件的基本特性
作用在弹性元件上的载荷(输入的力、力矩、压力、温度等) 与该载荷作用下弹性元件产生的变形之间的关系称为弹性元件的 基本特性。
1. 特性的表示方法:
位移
力
f (F)
转角 位移
f (M ) 力矩 f (P)
压力
2. 刚度和灵敏度:
(1)刚度: 作用在弹性元件上的载荷增量与弹性元件相应产生的变形增
l=l0[1+at(t-t0)] 热胀冷缩现象
6. 固有频率------提高灵敏度会降低固有频率,使动态特性变差
7. 机械品质因数
Q
Es Ec
每个振动周期存储的弹 每个振动周期由阻尼等
性应变能量 消耗的能量
f 1 k
2 m
二.几种常用弹性敏感元件介绍
(一)膜片、膜盒 1. 结构和用途:
(1)结构:膜片是一种周边固定的圆形弹性薄片;根据轴向截 面形状的不同分成平膜片和波纹膜片两种。为了便于膜片与输出 机构的其他零件相连,一般在膜片中心焊有硬芯。
2. 平膜片的计算公式 :
结构:周边刚性固定、无硬芯的平膜片,在均匀压力P的作用下,
膜片中心位移量λ与压力P的关系式为:
PR 4 Eh4
16 3(1 2
)h
7 3(1 )
3
h3
式中:R—膜片的工作半径;h—膜片的厚度;E—膜片的弹性模
量;μ—膜片材料的泊松比,对于金属材料μ=0.3。
当λ<<h时,上式简化为:
输出位移与输入力的关系
如果把若干个刚度分
F
别为Fi’的线性弹性元
件并联在一起使用,
F1
F2
Fi
其总刚度为 :
λ
Fn-1 Fn
F' F
n
式中 F Fi ; 1 2 i
n
i 1
所以:
F'
F
F i i 1
n i 1
Fi
i
n
Fi '
i 1
并联线性弹性元件组成的系统总刚度等于每个元件的刚度之和。
并联线性弹性元件组成的系统总灵敏度 j 等于:
性元件的输出变形不是立即完
成,而是在一定时间间隔内逐
渐完成的现象。
λ λ0 λ’0
0
F0 F
0
F0 F
λ 弹性滞后和弹性后效是同时发
生的,分别反映了弹性元件的
静态特性和动态特性,统称为 λ2 迟滞误差或滞后误差,用δch表 λ1
λmax
示:
ch
(1
2 )max m a x
100 %
0
F0
F
弹性元件产生滞后和后效的原因主要有:①弹性元件内部的
2004-10-25
传感器原理及应用 天津大学 李刚
11
λ
(2)用途: ① 测量压力、压差的弹性敏感元件;
② 用于隔离两种流体介质——隔离膜片。 (3)材料:分为金属和非金属两大类。
~ (4)测压范围及尺寸:从mmH2O 几百个大气压; ~ 直径从几个mm 几百个mm;
~ 金属膜片厚度为0.06mm 1.5mm; ~ 非金属膜片厚度为0. 1mm 5mm 。