合泰单片机生成pwm
合泰单片机生成pwm
#include "HT66FU70A.h"#define RS _pc0#define RW _pc1#define E _pd6float ad_shidu; //湿度变量float ad_wendu; //温度变量char Sunshine; //光照变量char timer0_cnt;long int m;unsigned int temp=0;void ad_init(void) //A/D转换初始化{//8分频;内部1.25V电压除能;内部参考电源电压来源于VDD_adcr1 = 0x03;//启动A/D转换模块(ADCR0寄存器第5位)_adoff = 0;}void ad_pa1(void) //pa1端口ad配置{//定义PA1为A/D输入,即AN1_pas0 = 0x30;//选择模拟通道AN1;ADC数据高字节是ADRH的第7位,低字节是ADRL的第4位_adcr0 = 0x01;}void ad_pa3(void) //pa3端口ad配置{//定义PA1为A/D输入,即AN1_pas1 = 0x30;//选择模拟通道AN1;ADC数据高字节是ADRH的第7位,低字节是ADRL的第4位_adcr0 = 0x03;}//开始进行ad转换void ad_switch(void){//ADCR0寄存器第七位_start=1;//start位0->1->0,表示启动A/D转换_start=0;}void pwn_1(void){_pcc5=0; //输出_pcpu5=1; //上拉// _pc5 = 1;_pcs2 |= (2 << 4); //PC5 功能选择为TM1输出// _tm1c1=0b10101000;// _tm1c0=0b00001111;_tm0c0 |= (0 << 4); //fsys/4_tm0c0 |= (1 << 0); //CCRP:001b_tm0al = 0x3f;_tm0ah = 0x00;_tm0c1 |= (2 << 6); //PWM模式_tm0c1 |= (2 << 4); //PWM 输出_tm0c1 |= (1 << 3); //高有效_tm0c1 &=~(1 << 1); //CCRP-周期CCRA-占空比_tm0c0 &=~(1 << 7); //运行定时器_tm0c0 |= (1 << 3); //计数器On/*_tm0c0 |= (1 << 3); //计数器On*/}void pwn_2(void){_pcc6=0; //输出_pcpu6=1; //上拉// _pc5 = 1;_pcs3 |= (1 << 0); //PC5 功能选择为TM1输出// _tm1c1=0b10101000;// _tm1c0=0b00001111;_tm0c0 |= (0 << 4); //fsys/4_tm0c0 |= (1 << 0); //CCRP:001b_tm0al = 0x3f;_tm0ah = 0x00;_tm0c1 |= (2 << 6); //PWM模式_tm0c1 |= (2 << 4); //PWM 输出_tm0c1 |= (1 << 3); //高有效_tm0c1 &=~(1 << 1); //CCRP-周期CCRA-占空比_tm0c0 &=~(1 << 7); //运行定时器_tm0c0 |= (1 << 3); //计数器On/*_tm0c0 |= (1 << 3); //计数器On*/}//定时器void time_init(void){//保持对应的I/O口的原来功能_pds2 = 0;_phs0 = 0;_tm0c0 = 0x00; //简易型TM(查找TMnC0寄存器),4分频/*_tm0c1 = 0xc1; //简易型TM(TMnC1寄存器)计数器模式;比较器A匹配*//*计数值的上限是3FFH,这里取计数初值为356H,即每隔(3FFH-356H)=169x1/(fsys/4)的时间触发一次中断*//* _tm0al = 0x56; //简易型TM(TM0 CCRA低字节寄存器)先写低字节_tm0ah = 0x03; //简易型TM(TM0 CCRA高字节寄存器)先读高字节,再读低字节*/_tm0al = 0x3f;_tm0ah = 0x00;_t0on = 1; //启动定时器0(TM0C0寄存器的bit3位)*/_t0pe = 1; //定时器0比较器A匹配中断控制位(MFI0寄存器bit1位)_mf0e = 1; //允许多功能中断0,多功能中断包括TM中断(INTC1寄存器bit1位)}void __attribute((interrupt(0x14))) time_int(void) //每1s中断一次,灯亮/灭一次{_emi = 0;//// MFI0寄存器bit5位,中断标志请求// _t0af = 0;//// timer0_cnt--;// if(!timer0_cnt){// _pe = ~_pe;// timer0_cnt = 2000;// }m++;while(m==200000)_tm0c0=0x10;_t0pf=0;_emi = 1;}void main(){//设置看门狗除能(使能应为:0b01010011) _wdtc = 0b10101011;m=0;time_init();_emi = 1;//开总中断pwn_1();while(1){}。
单片机生成互补pwm波的过程
单片机生成互补pwm波的过程
生成互补PWM波的过程如下:
1. 设置定时器工作模式:选择比较匹配模式。
定时器是单片机中的一个计时器/计数器,可以通过设置不同的工作模式来实
现各种功能。
2. 设置计数器初值:确定PWM波的周期。
通过调节计数器初值,可以控制PWM波的频率。
3. 设置比较器值:确定PWM波的占空比。
通过调节比较器值,可以控制PWM波的高电平和低电平的比例,即占空比。
4. 配置端口:选择IO口作为PWM输出口。
对应的IO口需要
设置为输出模式。
5. 启动定时器:使定时器开始计数。
6. 监测定时器状态:定时器每次计数完后,会自动产生一个中断,通过中断服务程序可以对比较器的值进行更新。
7. 更新比较器值:根据需要,可以在中断服务程序中改变比较器的值,以改变PWM波的占空比。
8. 输出PWM波:根据比较器的值,定时器会自动输出高电平
或低电平信号,从而生成PWM波。
通过以上步骤,就可以在单片机上生成互补PWM波。
互补PWM波一般用于驱动电机、控制LED亮度等应用场景中。
利用单片机产生pwm信号的软件实现方法
基于单片机的舵机控制方法具有简单、精度高、成本低、体积小的特点,并可根据不同的舵机数量加以灵活应用.
8.学位论文 冯治国 装载机用新型数字电液比例先导阀的研究 2004
随着国民经济的迅速发展,作为主要施工设备的工程机械在国家经济建设中发挥着越来越重要的作用,同时人们对工程机械的也提出了越来越高的
6.学位论文 崔宝玲 装载机工作装置数字电液比例控制系统 2001
该文提出了用数字高速开关阀为先导阀代替电液比例阀,与多路阀构成数字电液比例换向阀,实现对装载机工作装置的数字化控制.该文论述的工作装 置数字电液比例控制系统中采用两位三通高速开关阀,对多路阀的控制腔进行压力控制;电控部分采用8751单片机控制,PWM信号是由软件产生,而不是硬件 ,提高了电路的可靠性;高速开关阀的驱动采用单电压驱动,使软件、硬件设计简单.文中对数字电液比例系统的原理进行了分析,对其中主要元件多路阀、 高速开关阀进行了建模、仿真,提出了整个系统的数学模型及控制规律,并进行了计算机仿真和实验验证.
2.期刊论文 堵利宾.张河新.李建朝.韩建海.DU Li-bin.ZHANG He-xin.LI Jian-chao.HAN Jian-hai 新型高速开关
阀单片机PWM控制电路的设计及应用 -液压与气动2007(11)
主要介绍PWM高速开关阀控制电路的结构、工作原理及其具体的应用.经过试验表明,该控制系统利用其驱动电路及单片机的PWM等模块实现了高速开 关阀的快开、快闭等特性.该系统具有开闭效果好、功耗低、PWM信号频率和占空比均可调节、控制信号频率适应范围广等优点.该新型PWM高速开关阀控 制系统的开闭频率能达到毫秒级,能够精确地控制并在LCD显示执行元件的压力,实验结果表明该系统动态响应特性良好,在电气液控制系统中有广泛的使 用价值.
PWM信号生成原理及在单片机控制中的应用

PWM信号生成原理及在单片机控制中的应用随着现代科技的迅猛发展,单片机成为了各类电子设备和系统中不可或缺的关键组件。
而PWM信号作为一种重要的数字信号,广泛应用于单片机控制中,它的产生原理以及在单片机控制中的应用,是我们需要深入了解和研究的。
一、PWM信号生成原理PWM信号是一种脉冲宽度调制信号,通过改变脉冲的宽度来模拟模拟量电压的变化。
PWM信号的产生原理主要通过改变脉冲的高电平时间和低电平时间来控制信号的平均电平值,从而实现对输出的调整。
在数字系统中,PWM信号的生成需要借助计时器和定时器。
单片机中的计时器/定时器模块可以发挥关键作用,产生高效、精确的PWM信号。
具体来说,使用计时器和定时器可以先设定一个固定的周期,然后在每个周期内,根据占空比的设定,分别设定高电平和低电平的持续时间。
通常,高电平时间和低电平时间之和即为一个周期的时间。
二、PWM信号在单片机控制中的应用1. 电机控制PWM信号在电机控制中得到广泛应用。
通过控制PWM信号的占空比,可以实现对电机转速的调节。
通过改变高电平时间和低电平时间的比例,可以实现不同的转速控制。
2. LED亮度控制PWM信号在LED亮度控制中也扮演着重要角色。
通过改变PWM信号的占空比,可以实现对LED灯的亮度调节,从而得到不同亮度的光效。
3. 温度控制PWM信号还可以用于温度控制。
通过控制PWM信号的占空比,可以调整加热元件的电源开关频率和工作时间,从而实现对温度的控制。
这种控制方式下,可以减少功耗,提高系统效率。
4. 声音输出PWM信号还可应用于音频处理。
通过改变PWM信号的频率和占空比,可以产生不同音高的声音。
利用PWM信号的高频特性,可以实现模拟音频信号的数字化。
5. 无线通信PWM信号还可以被用于无线通信中。
通过控制PWM信号的占空比和频率,可以产生数字调制信号,实现与无线通信模块的数据传输。
三、PWM信号控制方法1. 软件控制通过使用单片机的GPIO口,可以编写程序,实现对PWM信号的软件控制。
单片机指令的PWM输出与模拟信号生成
单片机指令的PWM输出与模拟信号生成单片机(Microcontroller)是一种集成电路芯片,内部包含有处理器核心、存储器和各种输入输出接口。
它们可以通过编程实现各种功能,包括模拟信号的生成和PWM(Pulse Width Modulation)输出。
PWM是一种调制技术,通过调整方波信号的占空比来控制输出信号的平均功率。
单片机可以通过改变PWM输出的占空比,实现对电机速度、LED亮度等设备进行精确控制。
本文将介绍单片机指令中PWM 输出与模拟信号生成的原理和应用。
一、PWM的原理与工作原理PWM技术通过改变信号的高电平和低电平持续的时间比例来实现对输出信号的控制。
调整占空比可以改变输出信号的功率。
PWM信号由一个恒定频率的方波信号和一个占空比可变的调制信号组成。
单片机通过控制寄存器和定时器,可以产生一定频率和占空比的PWM信号。
具体实现PWM输出的方式根据不同的单片机型号和架构会有所差异。
一般来说,通过设置定时器的初值和重载值,以及改变比较器的阈值,单片机可以按需生成PWM波形。
PWM信号的频率决定了输出信号的周期,而占空比则决定了高电平信号的持续时间比例。
通常,高电平持续时间比例越大,输出信号的平均功率越高。
二、单片机中PWM输出的应用1. 电机控制:PWM可用于控制电机的转速和方向。
通过改变PWM信号的占空比,可以调整电机的运行速度。
同时,通过反馈回路,可以实现闭环控制,使电机保持稳定的转速。
2. LED亮度调节:基于人眼暂时视觉暂留效应,通过快速切换LED 的亮灭状态,可以在人眼的感知上产生不同亮度的效果。
通过改变PWM信号的占空比,可以实现对LED的亮度进行调节。
3. 数字信号转模拟信号:通过PWM技术,单片机可以将数字信号转换为模拟信号。
在数字信号中,通过改变PWM信号的频率和占空比,可以模拟出各种不同的模拟信号形态,如正弦波、方波等。
三、使用单片机指令生成PWM输出与模拟信号在使用单片机进行PWM输出和模拟信号生成时,需要根据具体的单片机型号和开发环境来进行相应的编程。
HT合泰单片机入门教程(第五章PWM)
HT合泰单片机入门教程(第五章PWM)第五章PWMPWM (Pulse Width Modulation) 是一种用于控制模拟电压和模拟电流的技术。
在单片机中,PWM 可以通过改变一个端口的输出电平的占空比来模拟出一个模拟信号。
在HT合泰单片机中,有多个IO口支持PWM功能,以便实现各种控制需求。
本章节将介绍如何在HT合泰单片机上使用PWM功能。
一、PWM原理PWM是通过改变一个端口的输出电平来模拟一个连续的模拟信号。
具体来说,PWM是通过改变输出端口的高电平时间和低电平时间来达到模拟电平的目的。
当PWM的周期很短时,输出端口的高电平时间较长,电平接近高电平。
当PWM的周期很长时,输出端口的高电平时间较短,电平接近低电平。
通过改变PWM的周期和占空比,我们可以模拟出不同的模拟电压和模拟电流。
二、HT合泰单片机中的PWM功能在HT合泰单片机中,每个IO口都有一个PWM功能。
我们可以通过设置相应的寄存器来配置PWM功能。
具体来说,我们需要设置以下寄存器来配置PWM功能:1. PTCR (PWM TCON Register):该寄存器用于开启和关闭 PWM 功能;2. PWMP (PWM Period Register):该寄存器用于设置 PWM 的周期;3. PWMC (PWM Control Register):该寄存器用于设置 PWM 的占空比。
三、使用PWM功能使用PWM功能需要经过以下几个步骤:1.配置IO口功能:将IO口配置为PWM功能;2.设置PWM的周期:确定PWM的周期;3.设置PWM的占空比:确定PWM的占空比;4.开启PWM功能:将PWM功能打开。
具体的操作如下:1.配置IO口功能:P3M1=0;//将P3.0端口配置为推挽输出模式(PWM输出)P3M0=1;2.设置PWM的周期:PWMP=100;//设置PWM的周期为1003.设置PWM的占空比:PWMC=30;//设置PWM的占空比为304.开启PWM功能:PTCR=1;//开启PWM功能以上操作将在P3.0端口生成一个PWM信号,并且周期为100,占空比为30。
合泰单片机教程

合泰单片机教程介绍:合泰单片机(简称HT单片机)是一种基于汇编语言和C语言的微型控制器。
它使用了16位的指令集,并集成了丰富的外设接口,使得它成为嵌入式系统开发的理想选择。
本文将为你提供一份合泰单片机的入门教程,帮助你了解其基本知识和应用。
一、单片机的基本概念1.1 单片机的定义单片机是一种集成了微型计算机的所有核心部件(如处理器、内存、IO接口等)的电子器件。
它通常用于控制和管理嵌入式系统的各种任务。
1.2 单片机的组成单片机主要由中央处理器(CPU)、存储器和输入输出(IO)端口组成。
其中,中央处理器用于处理数据和执行指令,存储器用于存放程序和数据,输入输出端口用于与外部设备进行通信。
1.3 单片机的应用单片机广泛应用于家电、汽车、电子设备、仪器仪表、工业自动化和物联网等领域。
它可以实现各种功能,如温度控制、机器人控制、数据采集、显示控制等。
二、合泰单片机的特点2.1 高性能合泰单片机采用16位指令集,具有较高的运算速度和处理能力。
它的工作频率可以达到20MHz,适合处理多种复杂的任务。
2.2 丰富的外设接口合泰单片机集成了多个外设接口,如UART串口、定时器、PWM输出、模拟输入、数字输入输出等,可以满足各种应用的需求。
2.3 低功耗设计合泰单片机采用先进的低功耗设计,具有快速唤醒和休眠功能,可以节省电能,延长电池寿命。
2.4 易用性合泰单片机具有友好的开发环境和丰富的开发工具,可以快速编写和调试程序。
同时,它还支持多种编程语言,如汇编语言和C语言。
三、合泰单片机的编程3.1 汇编语言编程汇编语言是一种底层语言,直接与单片机的寄存器和指令进行交互。
通过汇编语言,可以对单片机进行精确的控制和编程。
3.2 C语言编程C语言是一种高级语言,它提供了丰富的库函数和语法结构,使得程序开发更加快捷和便利。
合泰单片机提供了C语言的开发环境和库函数,方便开发者进行项目开发。
3.3 编程实例下面是一个使用C语言编写的LED闪烁的实例代码:```c#include <htc.h>#define _XTAL_FREQ 20000000void main(){TRISA = 0x00; //将端口A设置为输出while(1){PORTA = 0xFF; //点亮LED__delay_ms(1000); //延时1秒PORTA = 0x00; //关闭LED__delay_ms(1000); //延时1秒}}```这个实例代码使用了合泰单片机的GPIO接口控制LED的亮灭,通过循环和延时函数实现了LED的闪烁效果。
合泰单片机PWM输出程序
合泰单片机PWM输出程序;内容:PWM 输出控制LED 从亮逐渐变暗直到熄灭;完整源码下载:51hei/f/htpwm.rar#INCLUDEHT66F50.INCORG00HMOVA,08HMOVCP0C,A;设置管脚不为比较器脚MOVCP1C,A;设置管脚不为比较器脚CLRACERL;设置管家部位AD 脚MOVA,00010000BMOVTMPC0,A;T1BCP1 置1 使能TP1B_0CLRTM1C0;fINT=fSYS/4MOVA,10101001B;设置为PWM 模式PWM 输出高有效同相T1CCLR=1MOVTM1C1,A;CCRA 控制TP1B PWM 周期,CCRB 控制TP1B PWM 占空比MOVA,10101000B;置为PWM 模式PWM 输出高有效同相边沿对齐MOVTM1C2,A;MOVA,LOW 1024-1MOVTM1AL,A;设置TP1B PWM 周期CCRA=1024uSMOVA,HIGH 1024-1MOVTM1AH,A;设置PC.0 为输出CLRPCC.0CLRPC.0;pc.0 输出低电平MOVA,5SETT1ON;PWM 开始工作MOVA,0FFH;设置占空比初始值MOV[80H],AMOVA,3;MOV[81H],Aa2:CALLM001;延时SZ[80H];判断占空比低位是否为0JMP$+2JMPA3DEC[80H];否低位减1JMPA5A3:SZ[81H];是则判断高位是否为0JMPA4MOVA,0FFH;是低位存0FFHMOV[80H],A;MOVA,3;高位存3MOV[81H], A;不能大于周期JMPA2A4:DEC[81H];否则高位减1MOVA,0FFH;MOV[80H],A; 低位存0FFHA5:mova,[80H];将占空比的数存到CCRB 中movTM1BL,A;MOVA,[81H];MOVTM1BH,A;jmpA2M001:MOVA,2MOV[85H],AM002:MOVA,20MOV[86H],AM003:MOVA,250MOV[87H],AM004:SDZ[87H]JMPM004SDZ[86H]JMPM003SDZ[85H]JMPM002 RETend。
合泰单片机ht46x65v220使用手册
注:这里只强调额定功率,超过极限参数所规定的范围将对芯片造成损害,无法预期芯片在上述标示范围外的工作状态,而 且若长期在标示范围外的条件下工作,可能影响芯片的可靠性。 Rev. 2.20 4 2014-06-06
HT46R65/HT46C65 直流电气特性
符号 VDD IDD1 IDD2 IDD3 ISTB1 ISTB2 参数 工作电压 工作电流 (晶体振荡、RC 振荡) 工作电流 (晶体振荡,RC 振荡) 工作电流 (fSYS=32768Hz) 静态电流 (*fS=T1) 静态电流 (*fS=RTC 振荡) 静态电流 (*fS=WDT 振荡) VDD — — 3V 5V 5V 3V 5V 3V 5V 3V 5V 3V 5V 3V 5V 3V 5V 3V 5V 3V 5V — 测试条件 条件 fSYS=4MHz fSYS=8MHz 无负载,ADC 关闭 fSYS=4MHz 无负载,ADC 关闭 fSYS=8MHz 无负载,ADC 关闭 无负载,系统 HALT, HALT 时 LCD 关闭 无负载,系统 HALT, HALT 时 LCD 打开, 电容型偏压 无负载,系统 HALT, HALT 时 LCD 打开, 电容型偏压 无负载,系统 HALT, HALT 时 LCD 打开, 电阻型偏压,1/2bias, VLCD=VDD (选择低电流偏压) 无负载,系统 HALT, HALT 时 LCD 打开, 电阻型偏压,1/3bias, VLCD=VDD (选择低电流偏压) 无负载,系统 HALT, HALT 时 LCD 打开, 电阻型偏压,1/2bias, VLCD=VDD (选择低电流偏压) 无负载,系统 HALT, HALT 时 LCD 打开, 电阻型偏压,1/3bias, VLCD=VDD (选择低电流偏压) — 最小 2.2 3.3 — — — — — — — — — — — — — — — — — — — 0 典型 — — 1 3 4 0.3 0.6 — — 2.5 10 2 6 17 34 13 28 14 26 10 19 —
单片机产生PWM波形控制LED灯亮度

一按键,按住时P1.0低电平,中断次数25次,125ms脉冲变
化一次,可看到波形占空比变化较慢,按键松开时P1.0高电平,
中断10次,则波形占空比变化较快。
四,实验仿真电路图
两个三极管有驱动作用,电感和电容起滤波作用,保证LED不至 于太过闪烁而看不清亮度变化。
感谢您的关注 !
携手共进,齐创精品工程
当cc=10H,ee=0时再cc--,ee++。在主程序中令P2.0口当cc 从0到10H的时间为高电平,而ee从10H到0的时间为低电平, 由于定时器的中断,cc不断增加,ee不断减少,则高电平时间 越来越长,低电平时间越来越短。(总周期不变)
•
为了反映出定时器中断对脉冲变化的影响,在P1.0口接
三,程序设计思路
•
采用单片机定时器产生PWM波,然后控制LED灯的亮度。
首先对定0赋初值,使之中断(定时)5ms,再让其中断10次 (次数可设定,只是输出波占空比变化快慢不同而已),再定
义两个变量cc=0,ee=10H(不同的值会有不同的周期,即
PWM波的周期,周期不能太大,否则会闪烁)。cc++,ee--,
随着电子技术的发展,出现了多种PWM技术,其中包括: 相电压控制PWM、脉宽PWM法、随机PWM、SPWM法、线 电压控制PWM等
单片机PWM调光程序
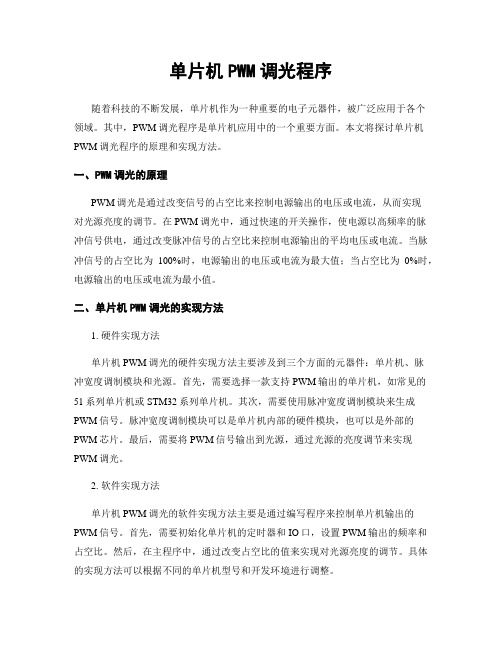
单片机PWM调光程序随着科技的不断发展,单片机作为一种重要的电子元器件,被广泛应用于各个领域。
其中,PWM调光程序是单片机应用中的一个重要方面。
本文将探讨单片机PWM调光程序的原理和实现方法。
一、PWM调光的原理PWM调光是通过改变信号的占空比来控制电源输出的电压或电流,从而实现对光源亮度的调节。
在PWM调光中,通过快速的开关操作,使电源以高频率的脉冲信号供电,通过改变脉冲信号的占空比来控制电源输出的平均电压或电流。
当脉冲信号的占空比为100%时,电源输出的电压或电流为最大值;当占空比为0%时,电源输出的电压或电流为最小值。
二、单片机PWM调光的实现方法1. 硬件实现方法单片机PWM调光的硬件实现方法主要涉及到三个方面的元器件:单片机、脉冲宽度调制模块和光源。
首先,需要选择一款支持PWM输出的单片机,如常见的51系列单片机或STM32系列单片机。
其次,需要使用脉冲宽度调制模块来生成PWM信号。
脉冲宽度调制模块可以是单片机内部的硬件模块,也可以是外部的PWM芯片。
最后,需要将PWM信号输出到光源,通过光源的亮度调节来实现PWM调光。
2. 软件实现方法单片机PWM调光的软件实现方法主要是通过编写程序来控制单片机输出的PWM信号。
首先,需要初始化单片机的定时器和IO口,设置PWM输出的频率和占空比。
然后,在主程序中,通过改变占空比的值来实现对光源亮度的调节。
具体的实现方法可以根据不同的单片机型号和开发环境进行调整。
三、单片机PWM调光的应用单片机PWM调光广泛应用于各个领域,如照明、舞台灯光、电子显示屏等。
在照明领域,通过PWM调光可以实现对灯具亮度的精确控制,满足不同场景下的照明需求。
在舞台灯光中,通过PWM调光可以实现灯光的渐变效果,增强舞台效果。
在电子显示屏中,通过PWM调光可以实现对显示屏亮度的调节,提高显示效果。
四、单片机PWM调光的优势相比于传统的调光方法,单片机PWM调光具有以下几个优势。
单片机PWM调光原理与实现方法
单片机PWM调光原理与实现方法近年来,随着LED灯具的广泛应用,调光技术也变得越来越重要。
单片机作为调光控制的核心部件之一,使用PWM(脉宽调制)技术可以实现灯光的亮度调节。
本文将介绍单片机PWM调光原理及实现方法。
一、PWM调光原理PWM是一种基于时间的调光方法,通过改变信号的高低电平持续时间的比例来调节灯光的亮度。
该方法适用于LED等光源,因为LED的发光亮度与通电时间成正比。
PWM调光原理如下:1. 设定周期:在PWM调光中,首先需要设定一个时间的基本周期。
周期越大,灯光的亮度变化也就越平滑。
典型的PWM周期一般为几十微秒。
2. 设定占空比:占空比是表示高电平时间占总周期时间的比例,通常以百分比表示。
占空比越高,灯光亮度越大;占空比越低,灯光亮度越小。
3. 生成PWM信号:根据设定的周期和占空比,单片机通过不断计数生成PWM信号。
当计数值小于占空比时,输出高电平;当计数值大于占空比时,输出低电平。
通过改变计数阈值,可以实现不同占空比的PWM信号。
4. 连接LED灯:通过PWM输出口将生成的PWM信号连接到LED灯。
当PWM信号为高电平时,LED点亮;为低电平时,LED熄灭。
通过不断重复生成PWM信号,可实现灯光的调光效果。
二、实现方法在单片机上实现PWM调光功能有多种方法,下面将介绍两种常见的实现方法。
1. 软件实现PWM调光软件实现PWM调光是通过单片机的定时器和计数器来实现的。
具体步骤如下:1) 设置定时器:选择适合的定时器工作模式,并设置定时周期。
定时周期即为PWM的周期。
2) 设置计数器:设置计数器的初值。
3) 发出PWM信号:当计数器值小于占空比时,输出高电平;否则输出低电平。
4) 重复步骤3,不断更新计数器的值,从而生成PWM信号。
2. 硬件实现PWM调光硬件实现PWM调光是通过使用专用的PWM模块和电路来实现的。
具体步骤如下:1) 配置PWM模块:根据单片机的特点,选择适合的PWM模块,并进行配置。
单片机pwm调光电路
单片机pwm调光电路单片机PWM调光电路一、引言随着人们对照明效果的追求,调光技术在照明领域中得到广泛应用。
而单片机PWM调光电路作为一种常见的调光技术,具有调光范围广、精度高、响应速度快等优点,被广泛应用于LED照明、舞台灯光等领域。
本文将介绍单片机PWM调光电路的原理和实现方法。
二、原理单片机PWM调光电路的原理是利用单片机的定时器产生PWM信号,通过改变PWM信号的占空比来调节灯光的亮度。
PWM(Pulse Width Modulation)即脉宽调制,通过改变信号脉冲的高电平时间和低电平时间的比例,来控制被调光设备的平均功率,从而达到调光的效果。
三、实现方法1. 硬件设计单片机PWM调光电路的硬件设计主要包括单片机、光敏电阻、三极管等元件。
其中,单片机是控制调光的核心部件,光敏电阻用于感知环境光亮度,并将感知的信号输入给单片机,三极管则用于控制LED灯的亮度。
2. 程序设计在单片机PWM调光电路中,需要通过编程来实现PWM信号的控制。
具体的实现步骤如下:(1)初始化定时器:设置定时器的工作模式和时钟源。
(2)设置PWM参数:设置PWM的频率和占空比。
(3)启动定时器:使定时器开始工作。
(4)根据光敏电阻的信号调节PWM占空比:通过读取光敏电阻的信号,计算出对应的PWM占空比,并将其写入PWM寄存器。
(5)循环执行以上步骤,实现实时调光。
四、优点与应用1. 优点(1)调光范围广:单片机PWM调光电路可以在0-100%之间连续调节亮度,满足不同场合的需求。
(2)精度高:PWM调光电路的调光精度可以达到0.1%左右,保证了照明效果的准确性。
(3)响应速度快:由于PWM信号的高低电平时间可以非常短,因此单片机PWM调光电路的响应速度很快,可以实现实时调光。
(4)节能环保:通过调节灯光的亮度,可以达到节能减排的效果,降低能耗,环保节能。
2. 应用(1)LED照明:单片机PWM调光电路广泛应用于LED照明领域,通过调节LED的亮度,实现不同场合的照明需求,如家居照明、商业照明等。
单片机pwm波形生成方法
单片机pwm波形生成方法Pulse width modulation (PWM) is a widely used method for generating analog waveforms using digital signals. It is commonly used in microcontroller-based applications such as controlling the speed of motor and LED brightness. PWM波形生成是利用数字信号生成模拟波形的一种常用方法。
它通常用于微控制器应用中,比如控制电机的速度和LED的亮度。
One of the main advantages of using PWM is its ability to control the power supplied to electrical devices, thus providing efficiency and flexibility in various applications. 使用PWM的主要优点之一是它能够控制供电给电器设备的功率,从而在各种应用中提供效率和灵活性。
One way to generate a PWM waveform is by using a timer/counter in the microcontroller. The timer/counter is programmed to count up to a specific value and then reset. During the counting process, the output at the timer/counter pin is high, and when the count is reset, the output goes low. 生成PWM波形的一种方法是利用微控制器中的定时器/计数器。
单片机指令的PWM信号生成和控制

单片机指令的PWM信号生成和控制PWM(Pulse Width Modulation)脉宽调制技术被广泛应用于单片机控制系统中。
PWM信号的生成与控制对于电机驱动、灯光调节、温度控制以及音频处理等应用起到了重要作用。
本文将重点探讨单片机指令的PWM信号生成和控制的原理、实现方法以及常见应用。
一、PWM信号生成原理PWM信号是一种以方波信号为基础的调制信号,信号的占空比(Duty Cycle)决定了信号的高电平和低电平时间比例。
单片机通过改变占空比来实现对设备的控制。
常见的PWM生成方式有两种:软件生成PWM和硬件生成PWM。
软件生成PWM是通过编程计算电平切换的时间来实现,适合频率较低的应用。
硬件生成PWM则是利用单片机内部的定时器/计数器模块来产生PWM信号,适合频率较高的应用。
二、软件生成PWM信号软件生成PWM信号的关键在于精确计算出高电平和低电平的时间,并进行相应的IO电平切换。
以下是软件生成PWM信号的基本步骤:1. 初始化计时器:选择合适的定时器,并设置计时器的计数模式、计数时间、时钟源等参数。
2. 设置占空比:根据实际需求,计算出高电平和低电平的时间比例,即占空比。
3. 确定周期:根据应用需求,确定PWM信号的周期,即一个完整的方波信号的时间长度。
4. 计算高电平和低电平时间:根据占空比和周期计算出高电平和低电平的时间。
5. 控制IO电平:根据计算得到的时间,控制IO引脚的高电平和低电平。
6. 循环生成PWM信号:根据设定的周期,循环生成PWM信号,以实现对设备的控制。
三、硬件生成PWM信号硬件生成PWM信号利用单片机内部的定时器/计数器模块来产生精确的PWM信号。
硬件生成PWM的好处在于能够减轻CPU的负担,提高系统的实时性和稳定性。
以下是硬件生成PWM信号的基本步骤:1. 选择合适的定时器:根据需求选择适合的定时器,通常定时器/计数器模块都支持PWM信号的生成。
2. 初始化定时器:设置定时器的计数模式、计数时间、时钟源等参数。
单片机的PWM输出原理与应用

单片机的PWM输出原理与应用在单片机技术中,脉冲宽度调制(Pulse Width Modulation,PWM)是一种常见的数字信号调制技术。
PWM信号通过控制信号的高电平和低电平的时间比例,模拟出连续电平的变化,具有精确控制电平的特点。
本文将介绍单片机的PWM输出原理及其应用。
一、PWM输出原理单片机的PWM输出原理基于时间控制。
其基本思想是通过调整高电平和低电平之间的时间比例,实现对输出电平的控制。
单片机的PWM输出可以通过特定的寄存器进行配置。
以下是PWM输出的工作原理。
1. 设置定时器:通过单片机的定时器,设置一个固定的计数周期。
计数周期内的计数次数根据所需的PWM信号频率和单片机的时钟频率决定。
2. 输出比例设定:设置一个比较寄存器,该寄存器的值决定了高电平的持续时间。
将此值与定时器的计数值进行比较,当两者相等时,PWM信号的输出电平变为低电平。
3. 输出电平控制:在定时器计数过程中,当计数值小于比较寄存器的值时,输出信号的电平为高电平;当计数值大于等于比较寄存器的值时,输出信号的电平为低电平。
通过调整比较寄存器的值,可以控制高电平和低电平的时间比例,从而改变PWM输出的占空比。
占空比是高电平时间与一个完整周期的比例,可用于控制输出电平。
二、PWM输出应用PWM输出在单片机应用中有广泛的用途,以下列举了几个常见的应用领域。
1. 电机控制:PWM输出可用于直流电机的速度调节。
通过改变PWM信号的占空比,可以改变电机的转速。
占空比增大,则电机转速增加;占空比减小,则电机转速减小。
2. LED亮度控制:PWM输出可以实现LED的亮度调节。
改变PWM信号的占空比,可以改变LED的亮度。
占空比增大,则LED亮度增加;占空比减小,则LED亮度减小。
3. 温度控制:PWM输出可以用于温度控制系统中的电热器控制。
通过改变PWM信号的占空比,可以调节电热器工作时间比例,从而控制温度。
4. 音频处理:PWM输出可以实现音频信号的数字调制。
单片机PWM输出原理与应用实现
单片机PWM输出原理与应用实现一、引言在嵌入式系统中,单片机是最常用的控制核心之一。
其中,脉冲宽度调制(PWM)输出是单片机中常见且重要的功能之一。
本文将介绍单片机PWM输出的原理及其在实际应用中的实现方法。
二、单片机PWM输出原理1. PWM基本原理脉冲宽度调制是一种通过改变信号的占空比来控制电平的方法。
PWM信号周期性地以高电平和低电平交替出现,其中高电平持续时间称为脉冲宽度。
通过调整脉冲宽度和周期的比例,可以改变信号的平均电平值。
在单片机中,PWM输出一般是通过定时器模块来实现的。
2. 定时器模块定时器是单片机中用于计时和产生脉冲的重要外设。
在PWM输出中,常用的定时器模块有通用定时器(如AVR单片机的Timer/Counter)和专用定时器(如ATmega16中的PWM模块)。
定时器通常由一个计数器和若干个比较器组成。
计数器用于计数,比较器用于比较计数器的值与预设值。
3. 实现PWM输出实现PWM输出的基本步骤如下:(1)选择合适的定时器模块,并进行配置。
配置包括设置计数器的工作模式、预设比较器的值和选择计时器的时钟源等。
(2)设置占空比。
占空比是指高电平时间与周期之比,通常以百分比表示。
设置占空比可以通过改变比较器的值来实现。
(3)启动定时器,开始输出PWM信号。
定时器将按照预设的比较器值周期性地产生PWM波形。
三、单片机PWM输出应用实现1. LED亮度控制单片机的PWM输出可以用于控制LED的亮度。
以基于AVR单片机的PWM 功能为例,以下是实现LED亮度控制的基本步骤:(1)选择一个可用的数字输出引脚,配置为PWM输出模式。
(2)设置定时器的工作模式为PWM模式,并设置预设比较器的值以控制占空比。
(3)在主循环中改变比较器的值,从而改变LED的亮度。
2. 电机速度控制PWM输出还可以用于控制电机的转速。
以下是基于单片机的电机速度控制的基本步骤:(1)选择一个可用的数字输出引脚,配置为PWM输出模式。
单片机产生PWM
单片机产生PWM1.PWM定义脉冲宽度调制(PWM)是英文“Pulse Width Modulation”的缩写,简称脉宽调制。
它是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用于测量,通信,功率控制与变换等许多领域。
脉冲宽度调制(PWM)是一种对模拟信号电平进行数字编码的方法。
通过高分辨率计数器的使用,方波的占空比被调制用来对一个具体模拟信号的电平进行编码。
PWM信号仍然是数字的,因为在给定的任何时刻,满幅值的直流供电要么完全有(ON),要么完全无(OFF)。
电压或电流源是以一种通(ON)或断(OFF)的重复脉冲序列被加到模拟负载上去的。
通的时候即是直流供电被加到负载上的时候,断的时候即是供电被断开的时候。
只要带宽足够,任何模拟值都可以使用PWM进行编码。
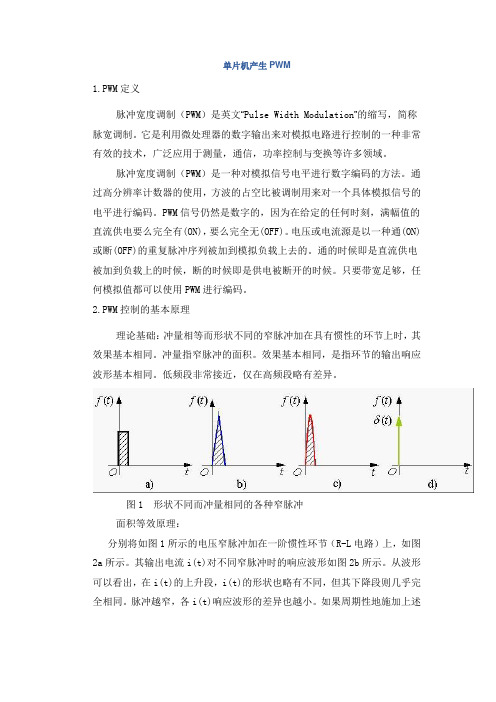
2.PWM控制的基本原理理论基础:冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
冲量指窄脉冲的面积。
效果基本相同,是指环节的输出响应波形基本相同。
低频段非常接近,仅在高频段略有差异。
图1 形状不同而冲量相同的各种窄脉冲面积等效原理:分别将如图1所示的电压窄脉冲加在一阶惯性环节(R-L电路)上,如图2a所示。
其输出电流i(t)对不同窄脉冲时的响应波形如图2b所示。
从波形可以看出,在i(t)的上升段,i(t)的形状也略有不同,但其下降段则几乎完全相同。
脉冲越窄,各i(t)响应波形的差异也越小。
如果周期性地施加上述脉冲,则响应i(t)也是周期性的。
用傅里叶级数分解后将可看出,各i(t)在低频段的特性将非常接近,仅在高频段有所不同。
图2冲量相同的各种窄脉冲的响应波形3. PWM相关概念占空比:就是输出的PWM中,高电平保持的时间与该PWM的时钟周期的时间之比如,一PWM的频率是1000Hz,那么它的时钟周期就是1ms,如果高电平出现的时间是200us,那么低电平的时间肯定是800us,那么占空比就是200:1000,也就是说PWM的占空比就是1:5。
电气自动化技术专业《用单片机产生PWM的方法》

• ?单片机应用技术?
任务引入
知识资讯
任务实施
小结拓展
取LED闪烁的频率为100HZ,即PWM的周期为10ms;
一个周期分成100份,则每份所占用的时间为 100us,100us用定时器产生;
每次定时到进行计数,计数100次为一个周期;
占空比为10,则前10次定时输出高电平,后90次输出 低电平。
任务引入
知识资讯
任务实施
小结拓展
单片机系统主频为12MH 1个时钟周期为=1/12 us 1个机器周期=12个时钟周期=1us
TMOD =001;
设置定时器工作方式 216-100/1=TM6OD4536=0FF9C
放置定时器初值
定时/计数器1 TH0 =定0时F/计F数器0
位 D7 D6 D5 DT4L 0D3=09D2C D1 D0ATE=1C/;TETM01 =M10;TRGA0T=E 1C/T
M1
M0
0 000 0 0 0 1
任务引入
知识资讯
任务实施
小结拓展
1:num=10; 2:num=40; 3:num=60; 4:num=90;
count num
学无止境,我们一直在努力!
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#include "HT66FU70A.h"
#define RS _pc0
#define RW _pc1
#define E _pd6
float ad_shidu; //湿度变量
float ad_wendu; //温度变量
char Sunshine; //光照变量
char timer0_cnt;
long int m;
unsigned int temp=0;
void ad_init(void) //A/D转换初始化
{
//8分频;内部1.25V电压除能;内部参考电源电压来源于VDD
_adcr1 = 0x03;
//启动A/D转换模块(ADCR0寄存器第5位)
_adoff = 0;
}
void ad_pa1(void) //pa1端口ad配置
{
//定义PA1为A/D输入,即AN1
_pas0 = 0x30;
//选择模拟通道AN1;ADC数据高字节是ADRH的第7位,低字节是ADRL的第4位_adcr0 = 0x01;
}
void ad_pa3(void) //pa3端口ad配置
{
//定义PA1为A/D输入,即AN1
_pas1 = 0x30;
//选择模拟通道AN1;ADC数据高字节是ADRH的第7位,低字节是ADRL的第4位_adcr0 = 0x03;
}
//开始进行ad转换
void ad_switch(void)
{
//ADCR0寄存器第七位
_start=1;
//start位0->1->0,表示启动A/D转换
_start=0;
}
void pwn_1(void)
{
_pcc5=0; //输出
_pcpu5=1; //上拉
// _pc5 = 1;
_pcs2 |= (2 << 4); //PC5 功能选择为TM1输出// _tm1c1=0b10101000;
// _tm1c0=0b00001111;
_tm0c0 |= (0 << 4); //fsys/4
_tm0c0 |= (1 << 0); //CCRP:001b
_tm0al = 0x3f;
_tm0ah = 0x00;
_tm0c1 |= (2 << 6); //PWM模式
_tm0c1 |= (2 << 4); //PWM 输出
_tm0c1 |= (1 << 3); //高有效
_tm0c1 &=~(1 << 1); //CCRP-周期CCRA-占空比_tm0c0 &=~(1 << 7); //运行定时器
_tm0c0 |= (1 << 3); //计数器On
/*_tm0c0 |= (1 << 3); //计数器On*/
}
void pwn_2(void)
{
_pcc6=0; //输出
_pcpu6=1; //上拉
// _pc5 = 1;
_pcs3 |= (1 << 0); //PC5 功能选择为TM1输出// _tm1c1=0b10101000;
// _tm1c0=0b00001111;
_tm0c0 |= (0 << 4); //fsys/4
_tm0c0 |= (1 << 0); //CCRP:001b
_tm0al = 0x3f;
_tm0ah = 0x00;
_tm0c1 |= (2 << 6); //PWM模式
_tm0c1 |= (2 << 4); //PWM 输出
_tm0c1 |= (1 << 3); //高有效
_tm0c1 &=~(1 << 1); //CCRP-周期CCRA-占空比_tm0c0 &=~(1 << 7); //运行定时器
_tm0c0 |= (1 << 3); //计数器On
/*_tm0c0 |= (1 << 3); //计数器On*/
}
//定时器
void time_init(void)
{
//保持对应的I/O口的原来功能
_pds2 = 0;
_phs0 = 0;
_tm0c0 = 0x00; //简易型TM(查找TMnC0寄存器),4分频
/*_tm0c1 = 0xc1; //简易型TM(TMnC1寄存器)计数器模式;比较器A匹配*/
/*计数值的上限是3FFH,这里取计数初值为356H,即每隔
(3FFH-356H)=169x1/(fsys/4)的时间触发一次中断*/
/* _tm0al = 0x56; //简易型TM(TM0 CCRA低字节寄存器)先写低字节
_tm0ah = 0x03; //简易型TM(TM0 CCRA高字节寄存器)先读高字节,再读低字节*/
_tm0al = 0x3f;
_tm0ah = 0x00;
_t0on = 1; //启动定时器0(TM0C0寄存器的bit3位)*/
_t0pe = 1; //定时器0比较器A匹配中断控制位(MFI0寄存器bit1位)
_mf0e = 1; //允许多功能中断0,多功能中断包括TM中断(INTC1寄存器bit1位)
}
void __attribute((interrupt(0x14))) time_int(void) //每1s中断一次,灯亮/灭一次
{
_emi = 0;
//
// MFI0寄存器bit5位,中断标志请求
// _t0af = 0;
//
// timer0_cnt--;
// if(!timer0_cnt){
// _pe = ~_pe;
// timer0_cnt = 2000;
// }
m++;
while(m==200000)
_tm0c0=0x10;
_t0pf=0;
_emi = 1;
}
void main()
{
//设置看门狗除能(使能应为:0b01010011) _wdtc = 0b10101011;
m=0;
time_init();
_emi = 1;//开总中断
pwn_1();
while(1)
{
}。