钻床电气控制设计
Z3050摇臂钻床电气控制系统的PLC改造设计
桂林理工大学GUILIN UNIVERSITY OF TECHNOLOGY本科毕业设计(论文) 题目: Z3050摇臂钻床电气控制系统的PLC改造设计学院:机械与控制工程学院专业(方向):机械设计制造及其自动化(机械装备)班级:机械11-2学生:指导教师:20 年月日1摘要本论文主要研究Z3050摇臂钻床的电气控制系统,并对其控制系统基于PLC进行改造设计。
阐述PLC的基本组成结构、工作原理和分类,讲述常用主令器的基本组成结构、原理和符号,分析Z3050摇臂钻床的基本组成结构、运动轨迹和电气控制电路,明确它的控制对象和控制目的,选择适合的PLC型号,完成PLC外部接线图和梯形图的设计。
使用CX-Programmer软件编写所设计的梯形图,并对其进行编译,确认梯形图编译无误后,将CX-Programmer软件和CX-Simulator软件配合使用,对梯形图按步骤进行模拟仿真验证,看得出的结构是否与预期的一样。
经验证与预期的结果一样,说明设计的梯形图使Z3050摇臂钻床在保留原有的操作方法和功能的基础上,能够取代原有传统的继电器控制系统。
完成了Z3050摇臂钻床电气控制系统的PLC改造设计,简化了Z3050摇臂钻床的控制电路,使其更易于维护和维修,具有更高的工作效率,提高了Z3050摇臂钻床的性能。
关键词:继电器;PLC;控制系统;Z3050摇臂钻床IDesign Z3050 radial drilling machine electrical control systembased on PLCStudent: YANG Hong-yuan Teacher: ZOU Zi-mingAbstract:In this thesis, to study the Z3050 radial drilling machine electrical control system,and engineered design their control system based on PLC.It describes basic structures PLC, working principle and classification, about common master's basic structures, principles and symbols, analyze basic structures Z3050 radial drilling trajectory and electrical control circuitry, specifically its control object and control purpose, select the appropriate PLC type, complete PLC external wiring diagram and ladder design. CX-Programmer is designed for software development ladder, and compile, compile correctly confirm the ladder, the CX-Programmer CX-Simulator software and software with the use of the ladder step by step simulation, see out of the structure is the same as expected.Proven and expected the same results, indicating the design of the ladder so Z3050 radial drilling machine on the basis of retaining the original features of the method of operation and can replace existing traditional relay control system.PLC completed the renovation design Z3050 radial drilling machine electrical control system, simplifying the Z3050 radial drilling machine control circuit, making it easier to maintain and repair, with higher efficiency, improve the Z3050 radial drilling performance.Key works:relay; PLC; control systems; Z3050 radial drilling machineII目录摘要 (I)Abstract (II)目录 (III).1 绪论 (1)本课题的背景和研究意义 (1)2 PLC的概述 (2)2.1 PLC的基本知识 (2)2.1.1 PLC的发展历史 (2)2.1.2 PLC的基本组成 (2)2.1.3 PLC的工作原理 (3)2.1.4 PLC的分类 (4)2.2 常用电器的基本结构 (5)2.2.1 接触器 (5)2.2.2 电磁式继电器 (6)2.2.3 按钮 (8)3 Z3050摇臂钻床的概述 (9)3.1 Z3050摇臂钻床的基本知识 (9)3.1.1 Z3050摇臂钻床用途和型号的含义 (9)3.1.2 Z3050摇臂钻床的基本结构组成 (9)3.1.3 Z3050的运动轨迹 (10)3.2 Z3050摇臂钻床电气控制系统的分析 (10)3.2.1主电路分析 (10)3.2.2 控制电路分析 (12)4 基于PLC对Z3050摇臂钻床电气控制系统的改造设计 (15)4.1 外部接线图的设计 (15)4.2 PLC型号的选择 (16)4.3 梯形图的设计 (17)III4.4梯形图的分析 (18)5 程序的编制和仿真验证(测试) (21)5.1 CX-Programmer软件的基本知识 (21)5.2 程序的编制和编译 (21)5.3 程序的模拟仿真测试 (24)5.4 小结 (29)6 结论 (30)致谢 (31)参考文献 (32)附录1 (33)附录2 (34)IV1 绪论本课题的背景和研究意义人们为了能够更容易得控制各种机械和设备的运行,发明了电气控制的方法,从此人们开始走进了自动化控制的时代。
摇臂钻床电气控制系统课程设计
摇臂钻床电气控制系统课程设计一、引言摇臂钻床是一种常见的加工设备,其电气控制系统是保证设备正常运行的重要部分。
本文将对摇臂钻床电气控制系统进行课程设计,包括系统结构设计、PLC编程、HMI界面设计等内容。
二、系统结构设计1. 系统概述摇臂钻床电气控制系统主要由PLC、HMI、伺服驱动器、电机和传感器等组成。
其中PLC负责控制整个系统的运行,HMI提供人机交互界面,伺服驱动器和电机实现工件定位和加工动作,传感器用于检测工件位置和状态。
2. 系统硬件设计根据系统概述,我们可以确定摇臂钻床电气控制系统的硬件组成。
具体来说,PLC采用西门子S7-200系列,HMI采用鼎信公司的触摸屏,伺服驱动器采用三菱公司的MR-J3系列,电机采用西门子公司的1FK7系列,传感器采用欧姆龙公司的E3Z系列。
3. 系统软件设计在硬件确定之后,我们需要对系统进行软件设计。
首先需要编写PLC程序,包括初始化、工件定位、加工动作等功能。
其次需要设计HMI 界面,提供人机交互操作界面。
最后需要对伺服驱动器和电机进行参数设置,以实现精准的工件定位和加工。
三、PLC编程1. 程序设计PLC程序设计是摇臂钻床电气控制系统中最重要的部分。
在程序设计中,我们需要考虑到系统的稳定性、可靠性和安全性等因素。
具体来说,我们可以采用Ladder图编程方式,将整个系统分为多个功能模块进行编程。
2. 程序实现在程序实现中,我们需要注意以下几点:(1)初始化:在系统启动时进行初始化操作,包括各个设备的状态检测和参数设置。
(2)工件定位:通过伺服驱动器和电机实现工件的定位控制。
(3)加工动作:根据加工需求进行钻孔、铰孔等加工动作。
(4)安全保护:在程序中添加安全保护措施,如急停按钮、限位开关等。
四、HMI界面设计1. 界面布局HMI界面是人机交互的重要部分。
在界面布局中,我们可以采用分屏显示方式,将设备状态、加工进度和操作按钮等分别显示在不同的屏幕上。
2. 界面设计在界面设计中,我们需要注意以下几点:(1)界面风格:采用简洁明了的风格,使用户能够快速理解和操作。
Z35型摇臂钻床电气控制电路设计
Z35型摇臂钻床电气控制电路设计摇臂钻床是一种常用的金属加工设备,主要用于对金属材料进行孔加工。
为了有效控制钻床的运行,需要设计一个电气控制电路来实现对钻床的电气控制。
一、电气控制电路的功能和要求1.钻孔控制:能够实现钻孔的启动和停止控制,以及钻孔进给速度的调节。
2.进给控制:能够实现刀具进给的启动和停止控制,以及进给速度的调节。
3.保护功能:能够监测钻孔过程中的异常情况,如过载、过流等,并及时停止钻孔。
4.人工操作:能够提供方便的人机界面,方便操作人员对钻床进行控制和监测。
二、电气控制电路的设计方案1.钻孔控制电路钻孔控制电路主要由按钮开关、电磁继电器和交流电机组成。
按钮开关用于启动和停止钻孔,电磁继电器用于控制交流电机的启动和停止,同时可以实现正反转的控制。
另外,还需要一个可变电阻来实现钻孔进给速度的调节。
2.进给控制电路进给控制电路主要由按钮开关、电磁继电器和直流电机组成。
按钮开关用于启动和停止进给,电磁继电器用于控制直流电机的启动和停止,同时可以实现正反转的控制。
同样,还需要一个可变电阻来实现进给速度的调节。
3.保护功能电路保护功能电路主要由过载保护器、过流保护器和断路器组成。
过载保护器和过流保护器用于监测钻孔过程中的异常情况,并及时切断电路,防止损坏设备。
断路器用于切断整个电气控制电路的电源,以保护人员安全。
4.人工操作电路人工操作电路主要由指示灯、报警器和触摸屏组成。
指示灯用于显示钻孔和进给状态,报警器用于发出警报,提醒操作人员注意钻床的工作状态。
触摸屏用于提供方便的人机界面,操作人员可以通过触摸屏对钻床进行控制和监测。
三、电气控制电路的工作原理1.钻孔控制电路的工作原理:当操作人员按下钻孔按钮开关时,按钮开关闭合,电磁继电器接通,交流电机启动。
同时,可变电阻通过调节电流大小来实现钻孔进给速度的调节。
当操作人员再次按下钻孔按钮开关时,按钮开关断开,电磁继电器断电,交流电机停止。
2.进给控制电路的工作原理:当操作人员按下进给按钮开关时,按钮开关闭合,电磁继电器接通,直流电机启动。
龙门钻床的主要电气控制图
龙门钻床的主要电气控制对于龙门钻床的传统控制它是比较复杂的,我们可以把它肢解成比较简单的形式。
肢解后我们可以把它龙门钻床的主电路和控制主电路中电动机正反转的控制电路。
下面我们来介绍这两个部分。
对于龙门钻床的钻头的旋转运动可以主轴电动机来控制,它还需要一个专用装置把工件放松与夹紧,所以它专用装置的放松与夹紧则可以通过一台液压泵电动机来实现控制。
对于钻头的下降与上升能够由一台交流异步电动机通过正反来控制,然而它的推工件以及它的回位则能够通过另外一台差不多的电机来控制。
冷却加工的钻头则可由冷却泵电动机来控制。
对于龙门钻床的部分电气控制电路如下图所示。
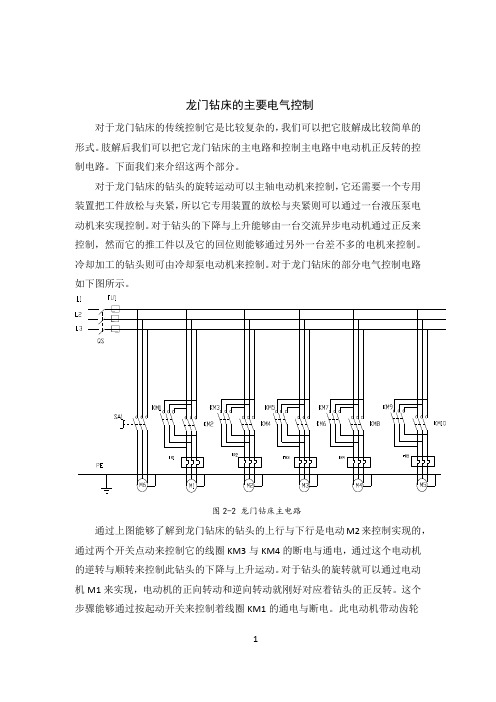
电源冷却泵电动机主轴电动机上、下行电动机夹持、松开电动机取卸及其复位电动机推工件及其复位电动机图2-2 龙门钻床主电路通过上图能够了解到龙门钻床的钻头的上行与下行是电动M2来控制实现的,通过两个开关点动来控制它的线圈KM3与KM4的断电与通电,通过这个电动机的逆转与顺转来控制此钻头的下降与上升运动。
对于钻头的旋转就可以通过电动机M1来实现,电动机的正向转动和逆向转动就刚好对应着钻头的正反转。
这个步骤能够通过按起动开关来控制着线圈KM1的通电与断电。
此电动机带动齿轮泵输送液压油等动作来控制钻头的正反转的,龙门钻床的夹紧和松开则是由液压泵电动机M3的正反转来实现,这主要是由KM5与KM6的得失电来控制。
由上面控制它的大多数电动机都是通过它正反转来控制它的。
对于它的控制电路就只要重点考虑它的正反转控制了。
控制部分可分为手动和自动控制部分。
手动部分的部分控制电路如下:图2-3 手动部分控制电路(1)正转按下正转按钮SB1KM1自锁触头闭合;(2)反转按下反转按钮SB2 KM2自锁触头闭合 (3)停止按下SB KM1 (KM2)线圈断电,主触点释放 M 断电停止。
自动控制部分部分控制电路如下[4]:KM1主触头闭合一电动机M 正转。
KM2主触头闭合 电动机M 反转 。
Z3050型摇臂钻床电气控制控制系统设计

Z3050型摇臂钻床电气控制控制系统设计首先,Z3050型摇臂钻床的电气控制控制系统包括电气控制柜、开关按钮、电机和传感器等组成。
其主要功能是实现钻头的升降、前后移动以及输送工件的控制。
在电气控制柜中,会安装各种控制元件,如接触器、继电器、开关、按钮等。
这些元件通过电线和电缆连接起来,构成一个完整的电气控制系统。
在设计中,需要合理布置和编排电气元件,使其易于操作和维护。
针对Z3050型摇臂钻床的控制需求,可以采用PLC控制系统。
PLC (Programmable Logic Controller)是一种用于自动化控制的可编程逻辑控制器,具有编程灵活、可靠性高、实时性好等优点。
通过PLC控制系统,可以实现对钻床的各种功能的精确控制。
在设计中,首先需要对钻床的工作流程进行分析和梳理。
根据工作流程,确定需要控制的功能和动作,例如:钻头升降、前后移动、开启/关闭钻头、设置加工工件参数等。
然后,根据这些需求,编写PLC程序,在PLC中设置相应的输入和输出端口,实现对这些功能的控制。
针对钻头升降功能的控制,可以采用电机驱动。
将电机与PLC相连,通过控制电机的正转和反转来实现钻头的升降。
在PLC程序中,设置相应的指令和逻辑,根据输入信号控制电机的工作状态。
针对钻头前后移动功能的控制,可以采用电机驱动或者气动驱动。
通过控制电机或气缸的动作来实现钻头的前后移动。
在PLC程序中,设置相应的指令和逻辑,根据输入信号控制电机或气缸的工作状态。
针对钻头的开启和关闭功能的控制,可以通过电磁阀来实现。
通过控制电磁阀的通断来控制钻头的开合。
在PLC程序中,设置相应的指令和逻辑,根据输入信号控制电磁阀的工作状态。
对于设置加工工件参数的功能,可以在PLC程序中设置相关的输入模块,通过按钮和传感器等设备来输入相应的参数。
根据输入的参数,PLC可以实时对钻床的工作进行调整和控制。
在设计时,还需要考虑到安全性和可靠性。
例如,可以设置急停按钮、过载保护装置等安全措施,以保证设备的安全运行。
Z3050型摇臂钻床电气控制线路6

电压继电器的文字符号与文字符号
(3)电流原则控制绕线式电动机串电阻启动控制线路
KA4的作用是保证开始启动时全部电阻接入转子电路
?
KA1、KA2、KA3的电 流释放值:
KA1>KA2>KA3
KA4的作用是保证开始启动时全部电阻接入转子电路
三、拓展练习
(一)自动运(点动) 2 怎样保证摇臂上升时,摇臂先松开,再上升?(或者液压泵电动 机M3先启动,摇臂升降电动机再启动)(摇臂松开到位后,SQ2 (6-8)受压闭合,KM2或KM3才能得电) 3 怎样保证摇臂上升到位后,摇臂完全停止,再锁紧?(或者摇臂 电动机先停止,液压泵电动机再启动(摇臂升降电动机有惯性) (SB3松开,KT线圈失电,KM2线圈失电,KT触点(1-17)延时断 开(延时时间与摇臂升降电动机的惯性有关系),KM5延时得电, SQ3夹紧到位后断开,KM5失电) 4 主轴箱和立柱放松夹紧时,怎样保证压力油不进入摇臂加紧放松 回路?(SB5、SB6采用复合按钮) 5 说明SQ1、SQ2、SQ3、SQ4、KT的作用。
欠电压继电器是当电压降至某一规定范围时动作的电压继电器; 零电压继电器是欠电压继电器的一种特殊形式,是当继电器的端电
压降至0或接近消失时才动作的电压继电器。
过电压继电器是当电压大于整定值时动作的电压继电器,主要 用于对电路或设备作过电压保护,常用的过电压继电器为JT4—A系 列,其动作电压可在105%~120%额定电压范围内调整。
工艺过程
1 起始时,容器内液体排空,阀门均关闭。
2 按下启动按钮SB后,阀门A打开,甲液体流入容器,待甲液体的 液面达到I位置时,发出关闭阀门A,打开阀门B的命令。
3 阀门B打开后,乙液体流入容器,待液面达到H位置时,发出关闭
z3040摇臂钻床电气控制系统课程设计
z3040摇臂钻床电气控制系统课程设计
摇臂钻床电气控制系统课程设计可以涵盖以下内容:
1. 系统结构设计:设计一个能够实现钻孔操作的电气控制系统,包括电气元件布局和连接方式,以及各个电气设备之间的控制关系。
2. 电路设计:根据摇臂钻床的工作原理和要求,设计相应的电路,包括电源电路、控制信号电路、输入输出接口电路等。
3. PLC编程:使用PLC(可编程逻辑控制器)进行程序编写,实现对摇臂钻床的自动化控制。
包括编写常规控制程序、故障诊断程序、安全保护程序等。
4. 人机界面设计:设计一个直观、易于操作的人机界面,用于操作员和设备之间的交互。
可以使用触摸屏、按键等方式,实现对钻孔深度、速度、进给速率等参数的设定和监控。
5. 运行测试:在设计完成后,进行系统的调试和测试。
包括对控制系统的各项功能进行测试,以及对系统的稳定性、可靠性进行评估。
6. 安全性设计:考虑到摇臂钻床操作的安全性,设计合适的安全保护措施,如急停开关、紧急停车按钮等,以确保操作人员和设备的安全。
7. 故障排除与维护:设计相应的故障排除程序和维护计划,以
便在系统出现故障时能够快速恢复正常运行。
通过以上步骤的设计,可以有效实现对摇臂钻床的电气控制,提高其自动化水平和工作效率,提升生产过程中的稳定性和安全性。
摇臂钻床电气控制系统设计
01摘要本课程设计是机械加工中常用的Z3040摇臂钻床传统电气控制系统的设计,旨在解决传统继电器—接触器电气控制系统存在的线路复杂、可靠性稳定性差、故障诊断和排除困难等难题。
由于PLC电气控制系统与继电器—接触器电气控制系统相比,具有结构简单,编程方便,调试周期短,可靠性高,抗干扰能力强,故障率低,对工作环境要求低等一系列优点。
因此,本文对Z3040摇臂钻床电气控制系统的改造,将把PLC控制技术应用到改造方案中去,从而大大提高摇臂钻床的工作性能。
此文分析了摇臂钻床的控制原理,制定了可编程控制器改造Z3040摇臂钻床电气控制系统的设计方案,完成了电气控制系统硬件和软件的设计,其中包括PLC机型的选择、I/O端口的分配、I/O硬件接线图的绘制、PLC 梯形图程序的设计。
对PLC控制摇臂钻床的工作过程作了详细阐述,叙述了采用PLC取代传统继电器—接触器电气控制系统从而提高机床工作性能的方法,给出了相应的控制原理图。
关键词:可编程控制器;摇臂钻床;梯形图;电气控制系统?目录摘要..............................................................................................................................1 绪论............................................................................................................................1.1 Z3040摇臂钻床简介..........................................1.2设计目的.................................... 错误!未定义书签。
2 Z3040摇臂钻床电气控制系统的原理 .......................................................................2.1主电路.......................................................2.2 控制电路、信号及照明电路 (5)2.2.1 主电动机的旋转控制............................................................................2.2.2 摇臂松开--升/降--摇臂夹紧控制 ......................................................2.2.3立柱和主轴箱的松开及夹紧控制及信号灯.........................................3 基于PLC的Z3040摇臂钻床电气控制系统硬件部分的设计................................3.1电气元件的选择..............................................3.2 PLC型号的选择..............................................3.2.1 根据PLC的物理结构 ..........................................................................3.2.2 根据PLC的指令功能 ..........................................................................3.2.3 根据PLC的输入输出点数 ..................................................................3.2.4 根据PLC的存储容量 ..........................................................................3.2.5 根据输入模块的类型............................................................................3.2.6 根据输出模块的类型............................................................................3.3 PLC的I/O电气接线图的设计...................................4 Z3040摇臂钻床电气控制系统软件部分的设计 .......................................................4.1 PLC梯形图程序的优化设计及程序调试:.........................4.1.1 主电动机的起动控制程序....................................................................4.1.2摇臂升降控制程序.................................................................................4.1.3 主轴箱放松或夹紧控制程序................................................................4.1.4 摇臂回转控制梯形图程序....................................................................4.1.5冷却泵开关控制梯形图程序................................................................. 参考文献.......................................................................................................................... 附录Ⅰ Z3040摇臂钻床电气控制原理图 ..................................................................... 附录Ⅱ Z3040摇臂钻床的电器元件明细表 ................................................................. 附录Ⅲ I/O电气接线图 .................................................................................................. 附录Ⅳ程序梯形图........................................................................................................1 绪 论1.1 Z3040摇臂钻床简介钻床是一种孔加工机床,可用来钻孔、扩孔、绞孔、攻螺纹及修刮端面等多种形式的加工。
Z3040摇臂钻床的电气控制设计

Z3040摇臂钻床的电气控制设计
摇臂钻床在机械加工领域具有广泛的应用,其电气控制设计是关键之一、在设计摇臂钻床的电气控制系统时,我们需要考虑以下几个方面:安
全性、可靠性、精确度以及操作简便性等。
其次,针对摇臂钻床的可靠性,我们需要设计一套高质量、稳定可靠
的电气控制系统。
这个控制系统需要使用优质的电气元器件,以提供稳定
的电源和信号输入。
我们需要合理选择和布置电气元器件,以确保工作期
间不会出现电气线路松动或接触不良等问题。
另外,我们还需要设置过载
保护器,以防止电机因工作负荷过大而发生烧坏或短路等故障。
综上所述,Z3040摇臂钻床的电气控制设计需要考虑安全性、可靠性、精确度以及操作简便性等方面。
通过合理的设计和选型,我们可以实现摇
臂钻床的高效、安全、精准的加工。
Z3040型摇臂钻床电气控制系统
1. 主轴旋转的控制 主轴的旋转运动由主轴电动机M1拖动,M1由
主轴起动按钮SB4、停止按钮SB3、接触器KM1实现 单方向起动、停止控制。指示灯HL4为主轴电动机 旋转指示。具体过程如下:
起动时,按起动按钮SB4→KM1得电并自锁→主触 点闭合→M1转动。
停车时,按停止按钮SB3→KM1断电释放→M1断电, 由液压系统控制使主轴制动停车。
二、Z3040型摇臂钻床的液压系统
Z3034型摇臂钻床具有两套液压系统,一套是操 纵机构液压系统,另一套是夹紧机构液压系统。前者 装在主轴箱内,用以实现主轴正反转、停车制动、空 挡、预选及变速;后者安装在摇臂背后的电器盒下部, 用以夹紧松开主轴箱、摇臂及立柱。
1. 操纵机构液压系统 该系统压力油由主轴电动机拖动齿轮泵送出,由 主轴变速、正反转及空挡操作手柄来改变两个操纵阀 的相互位置,其中上为“空挡”,下为“变速”,里 为“反转”,外为“正转”,中间位置为“停车”。 主轴转速及主轴进给量各由一个旋钮预选,然后操作 手柄。
主轴空挡时,将操作手柄扳向“空挡”位置,这时由于两个 操纵阀相互位置改变,压力油使主轴传动系统中滑移齿轮处于 中间位置,这时可用于轻便地转动主轴。
2. 夹紧机构液压系统 主轴箱、立柱和摇臂的夹紧与松开,是由液压泵电 动机拖动液压泵送出压力油,推动活塞菱形块来实现 的,其中主轴箱和立柱的夹紧与放松由一个油路控制, 摇臂的夹紧与松开,因与摇臂升降构成自动循环,所 以由另一个油路单独控制,这两个油路均由电磁阀操 纵。 欲夹紧或松开主轴箱及立柱时,首先起动液压电动 机,拖动液压泵,送出压力油,在电磁阀操纵下,使 压力油经二通阀流入夹紧或松开油腔,推动活塞和菱 形块实现夹紧或松开。由于液压泵电动机是点动控制, 所以主轴箱和立柱的夹紧与松开是点动的。
Z3040摇臂钻床电气控制原理图分析
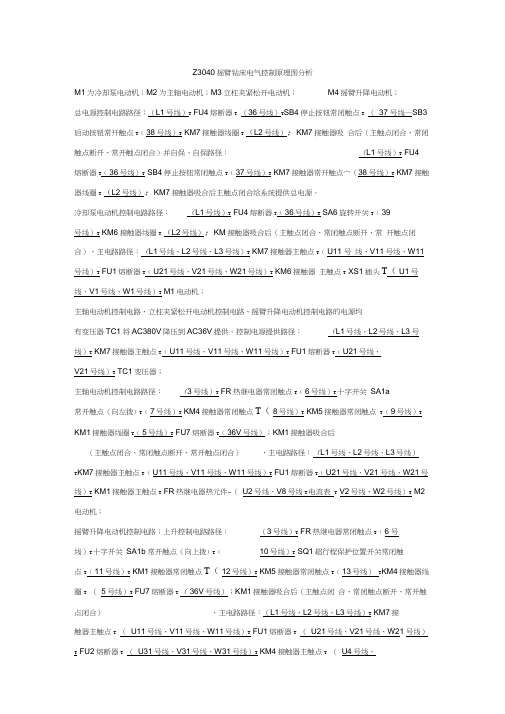
Z3040摇臂钻床电气控制原理图分析M1为冷却泵电动机;M2为主轴电动机;M3立柱夹紧松开电动机;M4摇臂升降电动机;总电源控制电路路径:(L1号线)T FU4熔断器T(36号线)T SB4停止按钮常闭触点T(37 号线—SB3启动按钮常开触点T( 38号线)T KM7接触器线圈T(L2号线);KM7接触器吸合后(主触点闭合、常闭触点断开、常开触点闭合)并自保,自保路径:(L1号线)T FU4熔断器T( 36号线)T SB4停止按钮常闭触点T( 37号线)T KM7接触器常开触点宀(38 号线)T KM7接触器线圈T(L2号线);KM7接触器吸合后主触点闭合给系统提供总电源。
冷却泵电动机控制电路路径:(L1号线)T FU4熔断器T( 36号线)T SA6旋转开关T( 39号线)T KM6接触器线圈T(L2号线);KM接触器吸合后(主触点闭合、常闭触点断开、常开触点闭合),主电路路径:(L1号线、L2号线、L3号线)T KM7接触器主触点T( U11 号线、V11号线、W11号线)T FU1熔断器T( U21号线、V21号线、W21号线)T KM6接触器主触点T XS1插头T(U1号线、V1号线、W1号线)T M1电动机;主轴电动机控制电路、立柱夹紧松开电动机控制电路、摇臂升降电动机控制电路的电源均有变压器TC1将AC380V降压到AC36V提供。
控制电源提供路径:(L1号线、L2号线、L3号线)T KM7接触器主触点T( U11号线、V11号线、W11号线)T FU1熔断器T( U21号线、V21号线)T TC1变压器;主轴电动机控制电路路径:(3号线)T FR热继电器常闭触点T( 6号线)T十字开关SA1a常开触点(向左拨)T( 7号线)T KM4接触器常闭触点T(8号线)T KM5接触器常闭触点T( 9号线)T KM1接触器线圈T( 5号线)T FU7熔断器T( 36V号线);KM1接触器吸合后(主触点闭合、常闭触点断开、常开触点闭合),主电路路径:(L1号线、L2号线、L3号线)T KM7接触器主触点T( U11号线、V11号线、W11号线)T FU1熔断器T( U21号线、V21 号线、W21号线)T KM1接触器主触点T FR热继电器热元件~(U2号线、V8号线T电流表T V2号线、W2号线)T M2电动机;摇臂升降电动机控制电路;上升控制电路路径:(3号线)T FR热继电器常闭触点T( 6 号线)T十字开关SA1b常开触点(向上拨)T(10号线)T SQ1超行程保护位置开关常闭触点T( 11号线)T KM1接触器常闭触点T(12号线)T KM5接触器常闭触点T( 13号线)T KM4接触器线圈T(5号线)T FU7熔断器T ( 36V号线);KM1接触器吸合后(主触点闭合、常闭触点断开、常开触点闭合),主电路路径:(L1号线、L2号线、L3号线)T KM7接触器主触点T(U11号线、V11号线、W11号线)T FU1熔断器T(U21号线、V21号线、W21 号线)T FU2熔断器T(U31号线、V31号线、W31号线)T KM4接触器主触点T(U4号线、V4号线、W4号线)T M4电动机;下降控制电路路径:(3号线)T FR热继电器常闭触点6号线十字开关SA1c常开触点(向下拨)T( 14号线)T SQ1超行程保护位置开关常闭触点15号线)T KM1接触器常闭触点T( 16号线)T KM4接触器常闭触点T( 17号线)T KM5接触器线圈T( 5号线)T FU7熔断器T( 36V号线);KM5接触器吸合后(主触点闭合、常闭触点断开、常开触点闭合),主电路路径:(L1号线、L2号线、L3号线)T KM7接触器主触点T( U11号线、V11 号线、W11号线)T FU1熔断器T( U21号线、V21号线、W21号线)T FU2熔断器T( U31 号线、V31号线、W31号线)T KM5接触器主触点T( U4号线、V4号线、W4号线)T M4电动机;立柱夹紧松开电动机控制电路;夹紧控制电路路径:(3号线)T FR热继电器常闭触点T J6号线)T SB1夹紧按钮常开触点T( 18号线)T KM3接触器常闭触点T( 19号线)T KM2接触器线圈T( 5号线)T FU7熔断器T( 36V号线);KM2接触器吸合后(主触点闭合、常闭触点断开、常开触点闭合),主电路路径:(L1号线、L2号线、L3号线)T KM7接触器主触点T( U11号线、V11号线、W11号线)T FU1熔断器T( U21号线、V21号线、W21号线)T FU2熔断器T( U31号线、V31号线、W31号线)T KM2接触器主触点T( U3号线、V3号线、W3号线)T M3电动机;松开控制电路路径:(3号线)T FR热继电器常闭触点T (6号线)T SB2松开按钮常开触点T( 20号线)T KM2接触器常闭触点T(21号线)T KM3接触器线圈T( 5号线)T FU7熔断器T( 36V号线);KM3接触器吸合后(主触点闭合、常闭触点断开、常开触点闭合);山号线)T FR热继电器常闭触点T( 6号线)T KM3接触器常开触点T( 22号线)T KM2接触器常闭触点T( 23号线)T KA中间继电器T( 5号线)T FU7熔断器T( 36V号线),并自保,自保路径:(3号线)T FR热继电器常闭触点T( 6号线)T KA中间继电器常开触点T(22号线)T KM2接触器常闭触点T( 23号线)T KA中间继电器T( 5号线)T FU7熔断器T(36V号线),KA中间继电器吸合后(常闭触点断开、常开触点闭合)(3号线)T FR热继电器常闭触点T ( 6号线)T K A中间继电器常开触点T(24号线)T YV电磁阀线圈T(5 号线)T FU7熔断器T ( 36V号线),主电路路径:(L1号线、L2号线、L3号线)T KM7接触器主触点T (U11号线、V11号线、W11号线)T FU1熔断器T(U21号线、V21号线、W21号线)T FU2熔断器T(U31号线、V31号线、W31号线)T KM3接触器主触点T(U3号线、V3号线、W3号线)T M3电动机;。
Z35型摇臂钻床电气控制解析课件

第二章 典型机床电气控制线路
(3)立柱松紧电动机M4的控制
立柱松紧电动机M4由按钮SB1和 SB2及接触器KM4和KM5控制,M4的 正反转可实现立柱的松开和夹紧。
第二章 典型机床电气控制线路
(4) 照明电路工作原理
(b) 内部示意图 HZ4-22鼓形组合开关结构示意图
第二章 典型机床电气控制线路
2.主电路工作原理
主电路中共有四台电动机, 冷却泵电动ቤተ መጻሕፍቲ ባይዱM1由转换开 关QS2直接控制,只能单向 运转,熔断器FU1作短路保 护。
主轴电动机M2由接触器 KM1控制,热继电器KH提供 过载保护。
摇臂升降电动机M3和立柱松紧电动机M4各由两只接触器KM2、 KM3和KM4、KM5控制,熔断器FU2和FU3分别作短路保护。
(3)行程开关 LX5-11小柱塞式行程开关主要用于交流50Hz,电压380V, 直流220V的控制电路中,作为限制各种机构和行程之用。
第二章 典型机床电气控制线路
(a) 外形图
(b) 内部结构图
(c) 微动开关外形图
LX5 -11 小柱塞式行程开关
第二章 典型机床电气控制线路
(4)组合开关
(a) 外形图
第二章 典型机床电气控制线路
2.Z35型摇臂钻床的控制要求
(1) 为满足攻螺纹工序要求, 主轴需实现正反转, 而主轴电动机 M2 只能单向旋转, 主轴的正反转依靠摩擦离合器来实现。
(2) 摇臂的升降和立柱的松紧分别由三相异步电动机M3和M4 驱动, 要求电动机M3和M4 能实现正反转控制。
(3) 钻削加工时, 由电动机M1 驱动冷却泵输送切削液, 要求电 动机M1 单向启动。
项目二_摇臂钻床的电气控制.ppt
3.时间继电器的图形符号与 文字符号
4.时间继电器的型号含 义
低压断路器
低压断路器即低压自动空气开关,又称自动空气断路器。 作用:电路的短路、过载、失电压与欠电压保护。
能自动分断故障电路,是低压配电网络和电力拖动系统中 常用的重要保护电器之一。
DZ5—20低压断路器外形与结构
低压断路器原理图
为了适用于不同的工作环境,可以将行程开关做成各 种各样的外形,如图2-2所示。
—、电气控制器件 行程开关
行程开关又称为限位开关。 作用:将机械位移转变为触点的动作信号,以控制 机械设备的运动,行程开关主要用于机床、自动生产线 和其他机械的限位及程序控制。 为了适用于不同的工作环境,可以将行程开关做成 各种各样的外形
工作台自动往返控制线路工作原理
多地控制线路
1、三地控制一台电动机的起动与停止
L1 L2 L3
FU2
FU2 FU2
FR
QF
FU1
FR
SB1 KM
SB5 SB1
SB6
SB1
SB4 SB4 SB4 SB3 SB2 SB1 FR
SB3 SB2 SB1
KM
SB4
KM
SB6
SB5
SB4
FR
M 3~
图(a)
KM KM
QF SB1-1
FU1
FU2 SB2-1
KM
FR
M1 3~
SB1-2 FR
KA SB2-2
SB3-1 SB3-2
KA
KM
KM
KA
主页
二、从两处实现一台电动机实现连续—点动控制
设计一控制电路,能在A、B两地分别控制同一台电动机单方 向连续运行与点动控制的电气原理图。 设计方法二:
Z35型摇臂钻床的电气控制原理与维修

Z35型摇臂钻床的电气控制原理与维修
一、电气控制原理:
1.主驱动电路:摇臂钻床的主导电机主要由交流变频器控制,变频器
可以实现无级调速和转向控制。
2.表进给电路:表进给电路主要由交流伺服电机和伺服驱动器组成,
通过控制伺服电机的转动来实现工作台的进给运动。
4.切削冷却电路:切削冷却电路主要由冷却泵和冷却液箱组成,通过
控制冷却泵工作来实现对切削过程的冷却。
二、维修方法:
1.故障现象分析:在维修过程中,需要根据故障现象对设备进行分析,例如摇臂不能移动、电机无法启动、无法切削等。
2.电气接触检查:检查设备的电气连接情况,确保电气接触良好,无
松动和接触不良的现象。
3.电气元件检查:检查设备中的电气元件,如保险丝、继电器、开关等,是否存在损坏或老化现象,如有需要及时更换。
4.电气线路检查:检查设备中的电气线路是否有短路、断路或接触不
良等问题,及时修复或更换损坏的线路。
5.设备参数设置:根据设备的工作要求,需要对设备的参数进行设置,如变频器的转速和转向、伺服驱动器的运动参数等。
6.故障排除测试:在修复后,需要对设备进行测试,确保设备的正常
运转和各项功能正常。
总结:Z35型摇臂钻床的电气控制原理与维修需要对设备的电路和元件进行检查和修理,并根据设备的工作要求进行参数设置,以确保设备的正常运转和工作效果。
在维修过程中需要注意安全,并及时更换损坏的部件和线路,以保证设备的使用寿命和工作效率。
Z3050摇臂钻床电气控制电路
Z3050摇臂钻床电气控制电路钻床是一种用途广泛的孔加工机床。
它主要是用钻头钻削精度要求不太高的孔,另外还可用来扩孔、铰孔、镗孔,以及刮平面、攻螺纹等。
钻床的结构形式很多,有立式钻床、卧式钻床、深孔钻床及多轴钻床等。
摇臂钻床是一种立式钻床,它适用于单件或批量生产中带有多孔的大型零件的孔加工。
本节以Z3050型摇臂钻床为例进行分析。
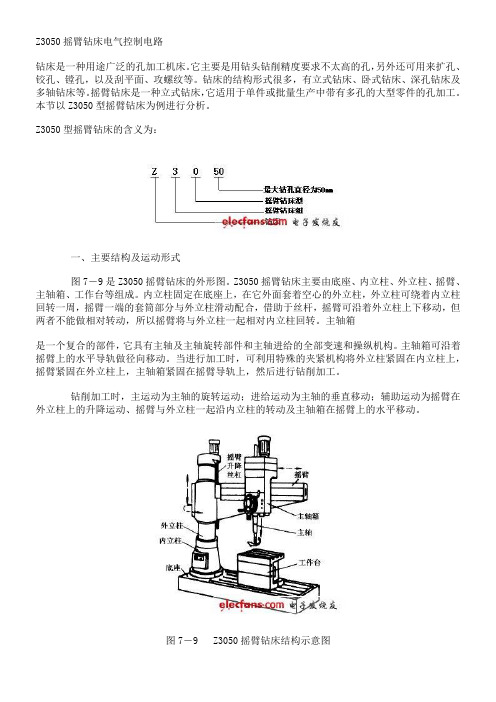
Z3050型摇臂钻床的含义为:一、主要结构及运动形式图7-9是Z3050摇臂钻床的外形图。
Z3050摇臂钻床主要由底座、内立柱、外立柱、摇臂、主轴箱、工作台等组成。
内立柱固定在底座上,在它外面套着空心的外立柱,外立柱可绕着内立柱回转一周,摇臂一端的套筒部分与外立柱滑动配合,借助于丝杆,摇臂可沿着外立柱上下移动,但两者不能做相对转动,所以摇臂将与外立柱一起相对内立柱回转。
主轴箱是一个复合的部件,它具有主轴及主轴旋转部件和主轴进给的全部变速和操纵机构。
主轴箱可沿着摇臂上的水平导轨做径向移动。
当进行加工时,可利用特殊的夹紧机构将外立柱紧固在内立柱上,摇臂紧固在外立柱上,主轴箱紧固在摇臂导轨上,然后进行钻削加工。
钻削加工时,主运动为主轴的旋转运动;进给运动为主轴的垂直移动;辅助运动为摇臂在外立柱上的升降运动、摇臂与外立柱一起沿内立柱的转动及主轴箱在摇臂上的水平移动。
图7-9 Z3050摇臂钻床结构示意图二、摇臂钻床的电力拖动及控制要求1.由于摇臂钻床的运动部件较多,为简化传动装置,需使用多台电动机拖动,主轴电动机承担主钻削及进给任务,摇臂升降、夹紧放松和冷却泵各用一台电动机拖动。
2.为了适应多种加工方式的要求,主轴及进给应在较大范围内调速。
但这些调速都是机械调速,用手柄操作变速箱调速,对电动机无任何调速要求。
主轴变速机构与进给变速机构在一个变速箱内,由主轴电动机拖动。
3.加工螺纹时要求主轴能正反转。
摇臂钻床的正反转一般用机械方法实现,电动机只需单方向旋转。
4.摇臂升降由单独的一台电动机拖动,要求能实现正反转。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机床电气控制设计说明书钻床电气控制设计机械工程学院(部)2017年6月16 日目录第1章Z3040摇臂钻床的结构 (3)1.1 Z3040摇臂钻床的简介1.2 Z3040摇臂钻床的结构第2章Z3040摇臂钻床的运动形式和电气控制要求的说明 (4)2.1 Z3040摇臂钻床的运动形式2.2 电气控制要求的说明第3章Z3040摇臂钻床继电接触器控制线路图 (7)3.1 z3040摇臂钻床继电接触器控制线路图总图3.2 具体控制过程第4章元器件的选型 (10)4.1 热继电器FR的选择4.2 接触器的选择4.3 时间继电器的选择4.4 照明及指示灯的选择4.5 Z3040摇臂钻床电器元器件明细表第5章PLC控制电路的说明 (13)5.1 PLC的选型5.2 PLC的组成5.3 PLC输入输出接口5.4 PLC的I/O端口分配表5.5 PLC梯形图5.6 PLC接线图第6章心得体会 (20)第7章参考文献 (21)附图一、钻床电气原理图附图二、PLC梯形图第1章 z3040摇臂钻床的结构1.1 Z3040摇臂钻床的简介钻床是一种孔加工机床,可用来钻孔、扩孔、绞孔、攻螺纹及修刮端面等多种形式的加工。
钻床的结构形式很多,有立式钻床、卧式钻床、深孔钻床等。
摇臂钻床是一种立式钻床,它适用于单件或批量生产中带有多孔大型零件的孔加工,是一般机械加工车间常用的机床。
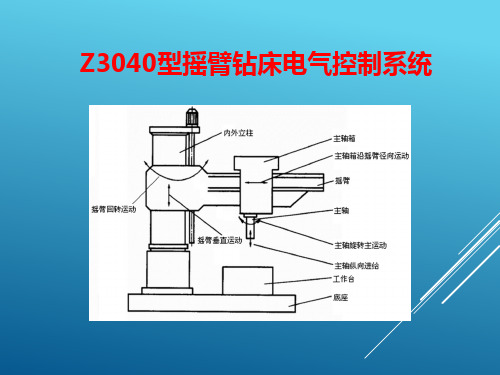
1.2 Z3040摇臂钻床的结构Z3040摇臂钻床主要由底座、内外立座、摇臂、主轴箱和工作台等组成。
摇臂的一端为套筒,套装在外立柱上,并借助丝杠的正、反转可沿外立柱作上下移动。
主轴箱安装在摇臂的水平导轨上可通过手轮操作使其在水平导轨上沿摇臂移动。
加工时,根据工件高度的不同,摇臂借助于丝杠可带着主轴箱沿外立柱上下升降。
在升降之前,应自动将摇臂松开,再进行升降,当达到所需的位置时,摇臂自动夹紧在立柱上。
摇臂钻床钻削加工分为工作运动和辅助运动。
工作运动包括:主运动(主轴的旋转运动)和进给运动(主轴轴向运动);辅助运动包括:主轴箱沿摇臂的横向移动,摇臂的回转和升降运动。
钻削加工时,钻头一面旋转一面作纵向进给。
钻床的主运动是主轴带着钻头作旋转运动。
进给运动是钻头的上下移动。
辅助运动是主轴箱沿摇臂水平移动,摇臂沿外立柱上下移动和摇臂与外立柱一起绕内立柱的回转运动。
摇臂回转和主轴箱的左右移动采用手动.第2章 z3040摇臂钻床的运动形式和电气控制要求的说明2.1 Z3040摇臂钻床的运动形式当进行加工时,由特殊的加紧装置将主轴箱紧固在摇臂导轨上,而外立柱紧固在内立柱上,摇臂紧固在外立柱上,然后进行钻削加工。
钻削加工时,钻头一边进行旋转切削,一边进行纵向进给,其运动形式为:(1)摇臂钻床的主运动为主轴的旋转运动;(2)进给运动为主;(3)辅助运动有:摇臂沿外立柱垂直移动,主轴箱沿摇臂长度方向的移动,摇臂与外立柱一起绕内立柱的回转运动。
2.2 电气控制要求的说明1.主轴电动机控制主轴电动机1M为单向旋转,由按钮1SB、2SB和接触器1KM实现起动和停止控制。
主轴的正、反转则由1M电动机拖动齿轮泵送出压力油,通过液压系统操纵机构,配合正、反转摩擦离合器驱动主轴正转或反转。
2.摇臂升降控制摇臂钻床在加工时,要求摇臂应处于夹紧状态,才能保证加工精度。
但在摇臂需要升降时,又要求摇臂处于松开状态,否则电动机负载大,机械磨损严重,无法升降工作。
摇臂上升或下降时,其动作过程是,随着升降指令发出,先使摇臂与外立柱处于松开状态,而后上升或下降,待升降到位时,要自行重新夹紧。
由于松开与夹紧工作是由液压系统实现,因此,升降控制必须与松紧机构液压系统紧密配合。
2M为升降电动机,由按钮3SB、4SB点动控制接触器2 KM 、3KM接通或断开,使2M电动机正、反向旋转,拖动摇臂上升或下降移动。
3M为液压泵电动机,通过接触器4 KM ,5KM接通或断开,使3M电动机正向带动双向液压泵送出压力油,经二位六通阀至摇臂夹紧机构实现夹紧与松开。
下面以摇臂上升为例简述动作过程:按下3SB按钮,时间继电器KT线圈通电,瞬时常开触点(13-14)闭合,接触器4 KM 线圈得电,液压泵电动机3M起动旋转带动液压泵送出压力油,同时断电延时断开的KT常开触点(1-17)闭合,使电磁阀YV线圈得电,液压泵输出的压力油经二位六通阀进入摇臂夹紧机构的松开油腔,推动活塞和菱形块,将摇臂松开。
同时,活塞杆通过弹簧片压上行程开关2SQ发出摇臂已松开信号。
此时,2SQ触点(6-13)断开,使接触器4 KM 线圈断电,液压泵电动机3M停转,油路单向阀保压,摇臂处于松开状态。
与此同时,2SQ触点(6-7)闭合,接触器2 KM 线圈得电,升降电动机2M得电起动旋转,带动摇臂上升,待摇臂上升至所需位置时,松开按钮2SB,2KM线圈断电,2M电动机停转,摇臂停止上升。
同时KT线圈也断电,KT常闭触点(17-18)瞬时闭合,而其延时断开的常开触点(1-17)仍未打开,使电磁阀YV继续得电,同时接触器5KM线圈得电,液压泵电动机3M反转,反向送出压力油,经二位六通阀反方向推动活塞和菱形块,将摇臂夹紧。
KT延时打开触点,经过1~3s延时后断开,同时活塞杆通过弹簧压下行程开关3SQ,使触点3SQ (1-17)也断开,电磁阀YV、5KM线圈断电。
液压泵电动机3M停转,摇臂上升后重新夹紧过程结束。
行程开关2SQ为摇臂放松信号开关。
行程开关3SQ为摇臂夹紧信号开关。
时间继电器 KT 延时断开常开触点是为保证当瞬间操作3SB或4SB,使4 KM 得电摇臂开始松开后放开3SB或 4SB时,若4 KM 过早断电,可能造成摇臂处于半松开状态。
有了KT延时断开触电(1-17)后,则能在KT线圈断电1~3s内处于闭合状态,使5KM 线圈得电,液压泵电动机3M反向旋转,使摇臂重新夹紧,直到延时时间到,KT 触点断开,3SQ动作,5KM断电为止,这样就保证了摇臂在加工工件前总是处于夹紧状态。
3.夹紧、松开控制 Z3040型摇臂钻床除了上述摇臂上升下降过程需要夹紧、松开控制外,还有主轴箱和立柱的松开、夹紧控制。
主轴箱和主柱的松开、夹紧从液压系统中看出二者是同时进行的。
当按下松开按钮5SB,接触器4 KM 线圈得电,液压泵电动机3M正转,拖动液压泵输送出压力油,经二位六通阀,进入主轴箱与立柱的松开油缸推动活塞和菱形块,使主轴箱与立柱实现松开,此时由于YV不得电,压力油不会进入摇臂松开活塞,摇臂仍处于夹紧状态。
当主轴箱与立柱松开时,行程开关4SQ不受压,触点(10l-102)闭合,指示灯1HL亮,表示主轴箱与立柱处于松开状态,可以手动操作主轴箱在摇臂的水平导轨上移动至适当位置。
同时推动摇臂(套在内立柱上)使外立柱绕内立柱旋转至适当的位置,按下夹紧按钮6SB,接触5KM线圈得电,3M电动机反转,拖动液压泵输送出反向压力油至夹紧油缸,使主轴箱和立柱夹紧。
同时行程开关4SQ压下,触点(101-102)断开,1HL灯暗,而(101-103)闭合,2HL灯亮,指示主轴箱与立柱处于夹紧状态,可以进行钻削加工。
4.冷却泵电动机控制冷却泵电动机容量小(0.125kW),由1SA开关控制单向旋转。
5.联锁、保护环节电路中利用2SQ实现摇臂松开到位,开始升降的联锁控制,利用3SQ,实现摇臂完全夹紧的联锁控制。
通过KT延时断开的常开触点实现摇臂松开后自动夹紧的联锁控制。
摇臂升降除了按钮4SB、3SB机械互锁外,还采用2 KM 、3KM电气的双重互锁控制。
主轴箱与立柱进行松开、夹紧工作时,为保证压力油不供给摇臂夹紧油路,通过5SB、6SB常闭触点切断YV线圈电路,达到联锁目的。
电路利用熔断器1FU作为总电路和电动机1M、4M的短路保护。
利用熔断器2FU作为电动机2M、3M及控制变压器T一次侧的短路保护,利用热继电器1KR 为1M电动机的过载保护,2KR为 3M电动机的过载保护。
组合行程开关1SQ作为摇臂上升、下降的极限位置保护,1SQ有两对常闭触点,当摇臂上升下降至极限位置时,相应触点动作切断与其对应的上升下降接触器 2 KM 、3KM,使2M 电动机停止转动,摇臂停止升降,实现升降极限位置保护,电路中失压或欠压保护由各接触器实现。
6.照明与信号指示电路通过控制变压器T降压提供照明灯EL安全电压,由SA2开关操作。
熔断器3FU作为短路保护。
当主轴电动机工作时,1KM触点(101-104)接通,指示灯3HL亮,表示主轴工作;当主轴箱、立柱处于夹紧状态时,4SQ触点(101-l03)接通,2HL灯亮。
主轴箱、立柱处于松开状态,4SQ触点(101-102)接通,1HL灯亮。
第3章 Z3040摇臂钻床继电接触器控制线路图3.1 Z3040摇臂钻床继电接触器控制线路图总图图3-1 Z3040摇臂钻床电气控制线路图3.2 具体控制过程具体控制过程为:(1)主轴电动机的启停按下主轴启动按钮SB2,接触器KM1得电吸合且自保持,主轴电动机M1运转。
按下停止按钮SB1,主轴电动机停止。
(2)摇臂上升按下摇臂上升按钮SB3,时间继电器KT得电,其瞬动常开触头和瞬时闭合延时打开的常开触头使接触器KM4和电磁阀YA动作,液压泵电动机M3启动,液压油进入摇臂装置的油缸,使摇臂松开。
待完全松开后,行程开关SQ2动作,其常闭触头断开使接触器KM4断电释放,液压泵电动机M3停止运转,其动合触头接通使接触器KM2得电吸合,摇臂升降电动机M2正向启动,带动摇臂上升。
上升到所需要的位置后,松开上升按钮SB3,时间继电器KT、接触器KM2断电释放,摇臂升降电动机M2停止运转,摇臂停止上升。
延时1-3秒后,时间继电器KT的常闭触头闭合,常开触头断开,但由于夹紧到位行程开关SQ3常闭触头处于导通状态,故YA继续处于吸合状态,接触器KM5吸合,液压泵电动机M3反向启动,向夹紧装置油缸中反向注油,使夹紧装置动作。
夹紧完毕后,行程开关SQ3动作,接触器KM5断电释放液压泵电动机M3停止运转,电磁阀YA断电。
时间继电器KT的作用是适应SB3松开到摇臂停止上升之间的惯性时间,避免摇臂惯性上升中突然夹紧。
(3)摇臂下降按下摇臂下降按钮SB4,动作过程与摇臂上升使相似。
(4)立柱和主轴箱同时松开和同时夹紧按下立柱和主轴箱松开按钮SB5,接触器KM4得电吸合,液压电动机M3正向启动,由于电磁阀YA没有得电,处于释放状态,所以液压油经2位6通阀分配至立柱和主轴箱松开油缸,立柱和主轴箱夹紧装置松开;按下立柱和主轴箱夹紧按钮SB6,接触器KM5得电吸合,M3反向启动,液压油分配至立柱和主轴箱夹紧油缸,立柱和主轴箱装置夹紧。
(5)摇臂升降限位保护该动作时靠上下限位开关SQ1U和SQ1D实现的。
上升到极限位置后,SQ1U动断触头断开,摇臂自动夹紧,同松开上升按钮SB3动作相同;下降到极限位置后,SQ1D动断触头断开,摇臂自动夹紧,同松开下降按钮SB4动作相同。