海尔集团公司面试经验总结成功案例90%通过
WOTAN 报警说明书 Microsoft Word 文档
9000 PLC 紧急停车!标志: PB10.2或PB11.2原因:由于紧急情况下关闭电路的中断B02-K1脱落(E1.0=0)或一个或几个电源部分马达保护开关失灵(E1.4=0)影响: 1,2,6,8设备主触点和主轴停转方法:在消除紧急条件后必须重新启动9032 SC装置没有启动条件的变换标志: M180.0原因:刀具没夹紧(B31-F1打开,E6.2=0)主轴主触点没激活(E2.7=1或A0.1=0)或放料盘没有正确接合或不接合影响:设备不接合方法:参见起因《主轴键启动一下》9034 换刀装置过滤器污标志: M180.2/M193.2原因:过滤器脏污(压力开关B51-F12打开,E17.5=0)影响:如果过滤器在三个小时内没更换,将会有9138错误出现方法:清洁或取代过滤器9035 液压过滤器污染标志: M180.3/M193.2原因:过滤器污染(压力开关B34-F2打开,E5.4=0)影响:如果过滤器没有在3小时内更换将会有9138错误方法:清洁或替换过滤器9036 梁补偿过滤器污染标志: M180.4/M193.2原因:过滤器污染(压力开关B36-F1打开,E5.6=0)影响:如果没有在3小时内更换过滤器将会有9138错误方法:干净或替换过滤器9037 支撑梁过滤器污染标志: M180.5/M193.2原因:过滤器污染(打开压力开关B34-F3,E5.5=0)影响:若3小时内没有更换过滤器将会有9138错误方法:清洁或替换过滤器9039 索引工作台过滤器脏标志: M180.7/M193.2原因:回转台过滤器污染(打开压力开关B35-F6,B02组,E14.5=0)影响:如果过滤器3小时之内得不到更换,将会有9138错误方法:清洁或替换过滤器9040 高出打油线标志: M181.0原因:油位太低(压力开关B23-F10打开,E7.5=0)影响: B23-K4和B23-K5没有接上因此切断油位支撑方法:检查油位如果必要的话升高油位9041 润滑水平AN2,3,4标志: M181.1原因:油位太低(电平开关B23-F7打开E7.4=0)影响:在下一次润滑时——9043错误方法:检查油位,必要的话提高油位9042 润滑水平工作台标志: M181.2原因:油位太低(电平开关B23-F6打开,E14.7=0)影响:在下一次润滑后跳动——错误9043方法:检查油位,如果必要提高油位9043 润滑不稳定标志: M181.3原因:在每次不成功润滑后碰到难题影响:当不成功润滑时PLC机器*经*4007至2,10方法:检查润滑泵和联合回轮(调压板),必要的话重复启动润滑开关直到成功润滑一周期为止9044 润滑水平AN1标志: M181.4原因:油位太低(水平开关B23-F9打开E7.3=0)影响:在下一次润滑后跳动→错误9043方法:检查油位,必要时提高它9045 润滑水平工作台标志: M181.5原因:油位太低(水平开关B23-F6.2打开E30.7=0)影响:在下一次润滑后跳动→错误9043方法:检查油位,必要时提高油位9046 测量系统空气净化器脏污标志: M181.6原因:至少一个测量系统的空气净化器受到污染(压力开关B33-F7打开E13.4=0)影响:工作报警方法:清洁或替换净化器9047 减少电源数据部分程序标志: M181.7原因:减少所要记录压力数据被部分程序接受(看工具监视系统就明白)影响:程序终止运行方法:编辑部分程序,按下清除错误键9048 按要求移动至指定位置标志: M182.0原因:在开机后指定位置必须相互接近影响:主轴和NC启动无效方法:按*要点9049 刀具夹紧控制关闭标志: M182.1原因:夹紧监视系统提供无效,由于同时按下主轴CW键和旋转CCW影响:工作警报:主轴上的刀具没有得到监视和适当夹紧方法:无法(在下一个释放工具时警报解除)9050 低油位主轴单元标志: M182.2原因:在轴承上油位太低(水平开关B34-F9,E46.6=0或E46.7=0)影响:工作警报方法:检查油位必要时提高9051 主轴单元油位高标志: M182.3原因:在轴承上油太多(水平开关B34-F9,E46.5=0)影响:工作报警方法:检查油位9052 移动限定的桥式标志: M182.4原因:移动过度的操作键板按下影响:工作时报警;移动限定的AN1将无效方法:无法9053 再装满冷却液标志: M182.5原因:冷却液位太低(电平开关B32-F10;E8.0=0,E47.6=0.依赖于电平开关B32-F11的结构;E47.5=0)影响:操作报警(预先报警)方法:检查冷却液位,必要时提高9054 冷却液位报警标志: M182.6原因:冷却液位太低,电平开关B32-F8工作,(E42.2=0)影响:工作报警方法:检查冷却液位,必要时提高9055 转换器太热标志: M182.7原因:至少有一个高温触点打开影响: 4,7,9;60秒后1,2方法:检查控制室通风,必要时替换过滤器垫子9056 马达保护开关3过载标志: M183.0原因:中断马达保护开关链“辅助设备3”(组B02)影响:工作报警方法:检查马达保护开关和联结部分9057 操作平台不在开始位置标志: M183.1原因:搬弄工作台板不在工作位置B38-S24/25影响:工作报警方法:将工作台放回工作位置9058 工作台入口传感器启动标志: M183.2原因:移动工作台上金属板B38-S26/28影响:工作报警方法:不要压金属板9059 工作台门打开标志: M183.3原因:工作台门打开B38-S3/4影响:工作报警方法:关门9060 工作台安全单元压紧标志: M183.3原因:安全带启动B38-S31/32影响:工作报警方法:释放安全带9085 **单元**堵住标志: M186.5原因:服务器容易附着旋转离开位置B22S71/72(13.2=0)影响:供给制止AN1/AN2(信息8207、8267)方法:将服务器旋回,并锁在原位置9086 准备附属设备标志: M186.6原因:附设进入准备工作位置(例:NC台啮合)影响: 4方法:无法9087 模拟附加设备标志: M186.7原因:模拟示波器或**附属物(为测试程序运行,不用固定附属设备)影响:工作报警方法:无法9088 纸带过滤器纸低标志: M187.0原因:纸监测系统启动(E46.0=0)影响:冷却液不再过滤方法:重新装纸9090 空调不稳定标志: M187.2原因:电机保护开关失灵(热)或B01-Q7(空调)(E2.2=0)影响:无方法:检查热度和空调9094 硬件要求重新安装标志: M187.6原因:系统单位变了(L116)(英寸←→米)影响: 4方法: PLC要求冷却启动(全部重新安装)9096 S-超过允许标志: M188.0原因:速度不允许(S>最小的或S大于最大的)影响: 5.8方法:使用允许速度和承认错误9098 主轴没有固定工作标志: M188.2原因:主轴转换器B11-G1管端<1/23=0-信号(转换器误,E2.5=0)B11-K2没找着(PLC错)A0.3=0影响: 4,6,8方法:检查转换器或消除主轴堵塞(PLC)9099 主轴设备电流过大标志: M188.3原因:主轴转换器B11-G1管端<1/27=0-信号(转换器误,E2.4=1)影响: 4,6,8方法:减少主轴负载或检查转换器9100 主轴设备过载标志: M188.4原因: B11-G1管端<3/2=0-信号(转换器过热)或B11-G5打开(主轴电机过热)(E2.6=0)影响: 4,6,8方法:减小负载或检查转换器9101 提*主轴停机时间长标志: M188.5原因:在60秒内设定主轴停机(从WC上的反馈消失,**B12-B1位置不对)影响: 4方法:等高线不符或检查**位置,检查穿孔补偿9103 主轴设备制动装置失灵标志: M188.7原因:回料“制动装置抬高”在操纵杆放下后1秒内无效(E3.7=0)或回料“制动装置使用”在操纵杆停止5秒内没使用(E3.7=0)(B11-K20)影响: 8,操纵杆阻塞主轴方法:检查制动装置和相关回料部分9104 进给设备AN1不能工作标志: M189.0原因: a>整流管AN1 B21-G1端A3/73=0-信号(E9.5=0)b>在3-相设备整流管B21-A21-G00/-G0端72-73:=0-信号(E8.6=0)影响: 2,6,8方法:检查整流管和相关进给设备9105 进给设备AN2不能工作标志: M189.1原因: a>整流管AN2 B21-G2端A3/73=0-信号(E10.5=0)b>在3-相设备整流管B21-A21-G00/-G0端72-73:=0-信号(E8.6=0)影响: 2,6,8方法:检查整流管和相关进给设备9106 进给设备AN3不能工作标志: M189.2原因: a>整流管AN3 B21-G3端A3/73=0-信号(E11.5=0)b>在3-相设备整流管B21-A21-G00/G0端72-73:=0-信号(E8.6=0)影响: 2,6,8方法:检查整流管和相关进给设备9107 进给设备AN4不能工作标志: M189.3原因: a>整流管AN4 B21-G4端A3/73=0-信号(E12.5=0)b>在3-相设备整流管B21-A21-G00/G0端72-73:=0-信号(E8.6=0)影响: 2,6,8方法:检查整流管和相关进给设备9108 进给设备AN5不能工作标志: M198.4原因: a>整流管AN5 B21-G5端A3/73=0-信号(E13.5=0)b>在3-相设备整流管B21-A21-G00/G0端72-73:=0-信号(E8.6=0)影响: AN5-5方法:检查整流管和相关进给装置9109 进给设备AN6不能工作标志: M189.5原因:整流管AN6信号装置“不能工作”。
JUKI贴片机常见故障 分析 处理方法
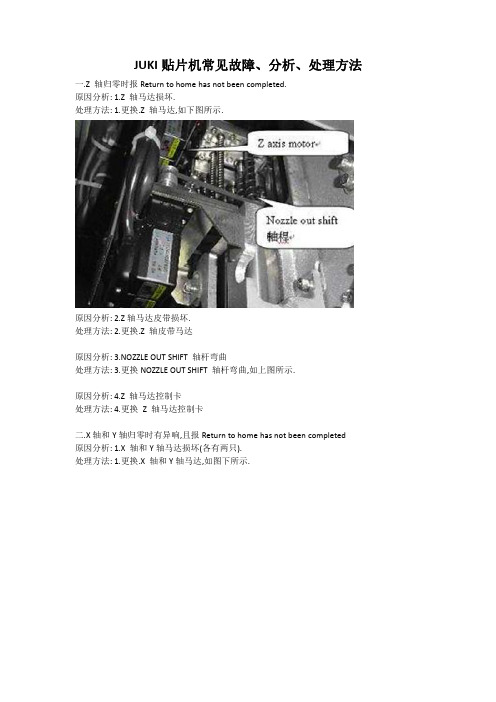
JUKI贴片机常见故障、分析、处理方法一.Z轴归零时报Return to home has not been completed.原因分析:1.Z轴马达损坏.处理方法:1.更换.Z轴马达,如下图所示.原因分析:2.Z轴马达皮带损坏.处理方法:2.更换.Z轴皮带马达原因分析:3.NOZZLE OUT SHIFT轴杆弯曲处理方法:3.更换NOZZLE OUT SHIFT轴杆弯曲,如上图所示.原因分析:4.Z轴马达控制卡处理方法:4.更换Z轴马达控制卡二.X轴和Y轴归零时有异响,且报Return to home has not been completed原因分析:1.X轴和Y轴马达损坏(各有两只).处理方法:1.更换.X轴和Y轴马达,如图下所示.原因分析:2.X轴和Y轴马达皮带损坏.处理方法:2.更换X轴和Y轴皮带马达,如上图所示.原因分析:3.X轴和Y轴线性磁尺(光学尺)损坏处理方法:3.更换X轴和Y轴线性磁尺(光学尺)损坏,如下图所示.原因分析:4.X轴和Y轴INCODE损坏处理方法:4.X轴和Y轴INCODE损坏,如上图所示.原因分析:5.X轴和Y轴马达电源卡损坏(没有供给x轴和Y轴马达电压)处理方法:5.更换X轴和Y轴马达电源卡原因分析:6.X轴和Y轴马达控制卡损坏处理方法:6.更换X轴和Y轴马达控制卡.三.MARK CAMERA无法读取机器的原点.原因分析:1.CAMERA不亮处理方法:1.检查CAMERA的电源线,接口和给MARK CAMERA供电的电源卡.原因分析:2.机器的校准块的原点赃污.处理方法:2.清洁赃物,如图所示.原因分析:3.与机器的原点偏差太大.处理方法:3.重新校准.四.真空检测吸嘴时报错.原因分析:1.真空切换电磁阀损坏.处理方法:1更换电磁阀,如图所示.原因分析:2.吸嘴的滤芯赃污处理方法:2.清洁滤芯,不行就更换.原因分析:3.真空气路有故障.处理方法:3.检查真空气路.五.“System file was lost”故障原因分析:非正常操作或意外删除或移动系统文件,导致系统文件丢失原因分析:1.系统文件路径变动或损坏.处理方法:1.重新把系统文件移至原来的路径中去或重新COPY其他同种机台同种系统的系统文件重新放置于原来的路径中,关机重启.2.上述还是不能解决问题,就请重新GHOST硬盘,步骤如下(1)准备一张98启动软盘,一张存有GHOST文件的软盘,双接口的数据线,硬盘跳线接口一个,在同机种同系统的机台上进行硬盘对拷.(2)关机,拆下硬盘,用跳线设置该硬盘为从盘;拿至同机种同系统的机台处,同样把备份系统的机台关机,拆下数据线,换上双接口的数据线,把系统损坏的硬盘一起插上.(3)开机,进入SET UP模式下,设置机器从A盘启动,关机.(4)在软驱中插入先前准备好的98启动盘,开机,直至机台读入A盘,显示>A:\(5)取出98启动盘,插入GHOST软盘,手工键入GHOST,按回车键,直到画面显示GHOST程序接口.(6)同时按下CTRL和ESC键,在左下角弹出菜单中,选者DISK\DISK TO DISK,按下回车键,在出现的对话框中,选者冲主盘到从盘对拷,按下OK键执行此项操作.(7)GHOST完成后,退出此程序后,返回至A:\,取出软盘,关机,.(8)拆下GHOST后的软盘,取下跳线,拿至原来的机台安装,重新启动.(9)在机器正常开启至主画面未归零之前,取消归零动作.在菜单栏中选择fire\control data management…\data manager,在出现的对话栏中,选择master data中的每一项,点选restor一下,恢复机台原有的calibration数据.然后再归零.原因分析:2.硬盘损坏.处理方法:2.更换新的硬盘,按上述介绍,重新GHOST硬盘,恢复系统.六.“Laser sensor is dirty”故障原因分析:laser sensor赃污.原因分析:ser sensor赃污.处理方法:1.清洁laser sensor.方法:用无尘布小心擦拭LASER SENSOR的两面镜面,2.在菜单栏中,选择控制--head控制—激光控制,出现以下图示再选择要检查的铁片头,下图先选择初始化激光,如图再选择图像显示,检查LASER曲线是否在65~200之间,且起伏不大,否则得重新擦拭LASER的镜面.原因分析:ser损坏.处理方法:2.更换LASER.原因分析:ser控制卡损坏.处理方法:3.更换LASER控制卡损坏.以上为JUKI贴片机生产过程中的常见故障,如有比较大的故障工程师无法处理可咨询深圳智驰科技。
biopower 中文使用说明书

BIOPOWER 中文使用说明书.经销商制造商仅限 RxREF 1601147-001REF 1303393-001REF 1601008-001REF 1600692-001REF 1601009-001REF 1600631-001REF 1500984-005REF 1301575-001REF 1502329-002REF 1307727-010选配件REF 1601008-001REF 1600692-001REF 1600598-001REF 1600785-001REF 1600786-001 REF 1600052-001REF 1303393-001 REF 1601009-001REF 1600631-001REF 1301575-001REF 1502329-010REF 1307727-010REF 1307312-010REF 1500984-010REF 1501738-010REF 1501635-010REF 1501621-010 REF 1307031-001Bien-Air Dental 参考目录1符号 (2)1.1BIOPOWER主机符号释义 (2)1.2BIOPOWER配件符号释义 (2)2产品简介、用途与表示法 (3)2.1产品简介 (3)2.2预期用途 (3)2.3预期患者人群 (3)2.4预期用户 (3)2.5预期医疗条件 (3)2.6患者禁忌症与警告 (3)2.7事故情形 (3)2.8表示法和章节链接 (3)3警告与使用预防措施 (4)3.1基本信息 (4)3.2警告 (4)4描述 (5)4.1BIOPOWER 系统概览 (5)4.2提供的套装 (6)4.3选配件 (6)4.4技术参数 (6)4.5性能 (7)4.6环境保护和处置信息 (7)4.7电磁兼容性 (技术描述) (7)4.7.1使用预防措施 (7)4.7.2电磁兼容性警告 (7)4.7.3电磁兼容性 – 辐射和抗干扰能力 (8)5安装 (10)5.1 安装 BIOPOWER 系统 (11)5.2开/关过程 (11)6界面总览 (12)6.1BIOPOWER模式 (12)6.2旋钮功能概览 (12)6.3声音警告 (13)7治疗 (14)7.1治疗画面描述 (14)7.2执行治疗:步骤P1和P2 (14)7.3执行治疗:步骤P3、P4和P5 (15)8设置 (16)8.1MX-i LED第3代微型电动马达速度 (16)8.2MX-i LED第3代微型电动马达扭矩 (16)8.3MX-i LED第3代微型电动马达旋转方向 (16)8.4灌注流量 (17)8.5弯手机转速比 (17)9特殊模式 (18)10 错误和故障处理列表 (20)10.1安全警告 (运行中) (20)10.2设备运行错误 (21)11 维护 (22)11.1维修 (22)11.2清洁与灭菌 (22)11.3重要信息 (23)11.4更换保险丝 (23)12 保修条款 (24)1.1BIOPOWER 主机符号释义1.2BIOPOWER 配件符号释义保险丝。
福建泉州培元中学2025届九年级上学期9月月考数学试题+答案

2024—2025学年福建省泉州市培元中学九年级(上)月考数学试卷(考试时间:120分钟 总分:150分)一、选择题:本题共10小题,每小题4分,共40分.在每小题给出的选项中,只有一项是符合题目要求的.1 )A .3B .C .4D .2.若35b a =,则a ba −的值为( ). A .25B .35 C .85D .523.用配方法解方程2630x x ++=时,配方结果正确的是( )A .()2312x += B .()2312x −= C .()236x −=D .()236x +=4.tan45 的值等于( )A B C D .15.如图,ABC △与DEF △O ,:2:3OB OE =,若ABC △的面积为4,则DEF △的面积为( )A .2B .6C .8D .96.如图,AB CD EF ∥∥,AF 与BE 相交于点G ,若3BG =,2CG =,6CE =,则EFAB的值是( )A .65B .85C .83D .47.根据福建省统计局数据,福建省2020年的地区生产总值为43903.89亿元,2022年的地区生产总值为53109.85亿元.设这两年福建省地区生产总值的年平均增长率为x ,根据题意可列方程( ) A .()43903.89153109.85x +=B .()243903.89153109.85x += C .243903.8953109.85x =D .()243903.89153109.85x +=8.如图,传送带和地面所成斜坡AB 的坡度1:3i =,如果某物体从地面A 处传送到离地面5m 高的B 处,那么该物体所经过的路程是( ).A .5mB .C .D .15m9.如图,将矩形ABCD 放置在一组等距的平行线中,恰好四个顶点都在平行线上,已知相邻平行线间的距离为1,若DCE ∠β=,则矩形ABCD 的周长可表示为( )A .252cos sin ββ+B .252sin cos ββ +C .252sin tan ββ+D .252tan cos ββ+10.如图,M 是ABC △三条角平分线的交点,过M 作DE AM ⊥,分别交AB 、AC 于D ,E 两点,设BD a =,DE b =,CE c =,关于x 的方程20ax bx c ++=( )A .一定有两个相等实根B .一定有两个不相等实根C .有两个实根,但无法确定是否相等D .无实根二、填空题:本题共6小题,共24分.11有意义,则x 的取值范围是______.12.一元二次方程2250x −=的解为______.13.如图,BD 是ABC △的中线E 、F 分别是BD ,BC 的中点,连接EF ,若4AD =.则EF 的长为______.14.如图,已知,AD 是ABC △的中线,E 是AD 的中点,则:AF FC =______.15.已知一元二次方程2310x x −+=的两根为1x ,2x ,则211252x x x −−的值为______.16.如图,在ABC △中,D 、E 、F 分别为AB 、AC 、BC 上的点,DE BC ∥,BF CF =,AF 分别交DE 、CD 于点G 、H ,且CG DE ⊥,6CD =,3AE =,有下面四个结论:①DG EG =;②AGD ACF △∽△;③点H 是AF 的中点;④9ABF AGE S S =△△.其中所有正确结论的序号是______.三、解答题:本题共9小题,共86分.解答应写出文字说明,证明过程或演算步骤.17.计算:2cos30tan 60sin 45cos 45°−°+°°. 18.解方程:22330x x −−=.19.如图,在方格图中,ABC △的顶点与线段A C ′′的端点都在小正方形的顶点上,且A B C ′′′△与ABC △是关于点O 为位似中心的位似图形,点A ,C 的对应点分别为点A ′,C ′.按下列要求完成画图,并保留画图痕迹.(1)请在方格图中画出位似中心O ; (2)请在方格图中将A B C ′′′△补画完整.20.如图,在ABC △中,D ,E 分别是边AB ,AC 上的点,连接DE ,且60A ∠=°,50ADE ∠=°,70B ∠=°.求证:ADE ACB △∽△.21.关于x 的一元二次方程2230x x k ++−=有两个不相等的实数根. (1)求k 的取值范围;(2)若方程的两个根为α,β,且23kk αβ=+,求k 的值.22.如图,用一段80米的篱笆围成三个一边靠墙、大小相同的长方形羊圈,左右两个长方形都有一个1米的门通往中间长方形,中间的长方形有一个1米的门通往外面,墙的最大可用长度为50米.(1)如果羊圈的总面积为345平方米,求边AB 的长;(2)请问羊圈的总面积能为480平方米吗?若能,请求出边AB 的长;若不能,请说明理由.23.某校九年级数学兴趣小组在陈老师的指导下开展项目式学习,小明设计了一个测量方案,具体过程如下:任务:测量旗杆的高度; 工具:皮尺,测角仪;示意图:如图,AB 表示旗杆,小明的目高 1.70m CD =,CD BD ⊥,AB BD ⊥.测量数据:15.20m DB =,从点C 测得旗杆AB 顶端A 的仰角33α=°.(1)请你根据上述方案及数据,求旗杆AB 的高度(结果精确到0.1m );(参考数据:tan 330.65°≈,cos330.84°≈)(2)请你帮小明再设计一个测量方案,并求出旗杆AB 的高度.要求:①从皮尺、标杆 2.50m EF =、镜子中选择合适的测量工具;②画出图形,写出已知值、测量值; ③利用解直角三角形或相似三角形的知识,求旗杆AB 的高度. 注:测量得到的线段长度用字母a ,b ,c ,…表示.24.如图,在平面直角坐标系xOy 中,直线483y x =−+与x 轴交于点A ,与y 轴交于点B .动点P 、Q分别从O 、B 同时出发,其中点P 以每秒4个单位的速度沿OB 向终点B 运动,点Q 以每秒5个单位的速度沿BA 向终点A 运动.设运动时间为t 秒.(1)填空:AB =______;OP =______;BQ =______(用t 的代数式表示); (2)连结PQ ,若AOB △和以B 、P 、Q 为顶点的三角形相似,求t 的值; (3)连结AP 、OQ ,若AP OQ ⊥,求t 的值;25.如图,四边形ABCD 的对角线AC 与BD 交于点E ,已知DCA DBA ∠=∠.(1)若12DC AB =,求CEBE的值;(2)若AC BD ⊥,ABC ADB ∠=∠,10AB =,BC =①设DEC △的面积为1S ,AEB △的面积为2S ,求12S S 的值; ②求tan DAB ∠的值.2024—2025学年福建省泉州市培元中学九年级(上)月考数学试卷参考答案一、选择题:本题共10小题,每小题4分,共40分.在每小题给出的选项中,只有一项是符合题目要求的.1.【答案】B【解析】【分析】本题考查了二次根式的性质和二次根式的乘法法则,根据二次根式的乘法法则得到,然后利用二次根式的性质化简即可.故选:B.2.【答案】A【解析】【分析】根据a和b之间的关系式用a来表示b,再代入所求代数式中计算即可求解.【详解】解:35ba=,35b a∴=,0a≠.3255a aa ba a−−∴==.故选:A.【点睛】本题考查分式的化简求值,熟练掌握该知识点是解题关键.3.【答案】D【解析】【分析】根据配方法的步骤,求解即可.【详解】解:2630x x++=,263x x+=−26939x x++=−+,()236x+=故选:D【点睛】此题考查了配方法求解一元二次方程,解题的关键是掌握配方法求解一元二次方程的步骤.4.【答案】D【解析】【分析】根据特殊角三角函数值,可得答案.【详解】解:tan451°=,故选D.5.【答案】D【解析】【分析】根据位似的性质求解即可.【详解】解:ABC △与DEF 是位似图形,:2:3OB OE =,()2:2:34:9ABC DEF S S ∴==△△, ABC △的面积为4,9DEFS ∴=△故选D .【点睛】此题是位似的性质,主要考查了位似比等于相似比,位似三角形的面积比等于位似比的平方,解本题的关键是掌握位似的性质. 6.【答案】C 【解析】【分析】先求出8GE =,再根据相似三角形判定的预备定理得出8GE =,根据相似三角形的性质即可求解. 【详解】解:2CG = ,6CE =,8GE ∴=, AB EF ∥,ABG FEG ∴△∽△,83EF EG AB BG ∴==. 故选:C【点睛】本题考查了相似三角形的判定与性质,更根据题意判断出ABG FEG △∽△是解题关键. 7.【答案】B 【解析】【分析】设这两年福建省地区生产总值的年平均增长率为x ,根据题意列出一元二次方程即可求解. 【详解】设这两年福建省地区生产总值的年平均增长率为x ,根据题意可列方程()243903.89153109.85x +=,故选:B .【点睛】本题考查了一元二次方程的应用,根据题意列出一元二次方程是解题的关键. 8.【答案】B 【解析】【分析】本题主要考查了解直角三角形的应用,掌握解直角三角形的方法是解题的关键. 首先根据坡度求出AC ,再利用勾股定理求出AB 即可得结论. 【详解】解:如图:由题意可得:5m BC =,斜坡的坡度1:3i=,13BC AC ∴=,即:513AC =,解得:15AC =,由勾股定理得:AB=(米).故选B .9.【答案】B 【解析】【分析】构造直角三角形,运用三角函数的定义求得线段BC 和CD 的表达式,进而求得矩形的周长. 【详解】解:如图,过D 作DF CE ⊥于点F ,过B 作BG CE ⊥于点G ,90DFC °∠= ,DCE β∠=,2DF =,2sin sin DF DC ββ∴==, 矩形ABCD ,90BCD ∴∠=°,90BCG DCF ∴∠+∠=°,90BGC ∠=° ,90GBC BCG ∴∠+∠=°,90BCG DCF ∠+∠=° ,DCF GBC β∴∠=∠=,90BGC °∠= ,GBC β∠=,5BG =,5cos cos BG BC ββ∴==, 2sin sin DF DC ββ== , ∴矩形ABCD 的周长为()5222cos sin BC DC ββ+=+故选:B .【点睛】本题考查了三角函数的定义,构造直角三角形,运用三角函数的定义求相应线段的表达式是解题关键. 10.【答案】A 【解析】【分析】M 是ABC △三条角平分线的交点,过M 作DEAM ⊥,则得出BDM MEC BMC ∠=∠=∠,即可得出DBM MBC △∽△,再求出BMC MEC △∽△,DBM EMC △∽△,即可得出:214ac b =,即可求解.【详解】解:AM 平分BAC ∠,DEAM ⊥,ADM AEM ∴∠=∠,1122MD ME DE b ===,1902BDM MEC BAC ∴∠=∠=°+∠, M 是ABC △三条角平分线的交点12MBC ABC ∴∠=∠,12MCB ACB ∠=∠, ()11801802BMC MBC MCB ABC ACB ∴∠=°−∠−∠=°−∠+∠,()111801809022BMC BAC BAC ∴∠=°−°−∠=°+∠,BDM MEC BMC ∴∠=∠=∠,M 是ABC △的内角平分线的交点,12∠∠∴=,DBM MBC ∴△∽△,同理可得出:BMC MEC △∽△,DBM EMC △∽△,BD MDME CE∴=, BD EC MD ME ∴⋅=⋅即:214ac b =,即240b ac ∆=−=. 故选:A .【点睛】此题主要考查了相似三角形的判定与性质,根据已知得出BDM MEC BMC ∠=∠=∠是解题关键.二、填空题:本题共6小题,共24分.11.【答案】2x ≥ 【解析】【分析】本题主要考查了二次根式有意义的条件,根据二次根式有意义的条件可知20x −≥,求出解集即可.【详解】根据题意可知20x −≥, 解得2x ≥. 故答案为:2x ≥. 12.【答案】15x =,25x =−【解析】【分析】先将常数项25移项到方程的右边,再利用直接开平方法解题即可.【详解】2250x −=,225x ∴=,5x ∴=± 故答案为:15x =,25x =−.【点睛】本题考查直接开平方法解一元二次方程,是重要考点,难度较易,掌握相关知识是解题关键. 13.【答案】2 【解析】【分析】先根据三角形的中线的概念求出DC ,再根据三角形中位线定理计算即可.【详解】解:BD 是ABC △的中线,4AD =,4DC AD ∴==,E ,F 分别是BD ,BC 的中点,EF ∴是BCD △的中位线,122EF DC ∴==, 故答案为:2.【点睛】本题考查的是三角形中位线定理,熟记三角形中位线等于第三边的一半是解题的关键.14.【答案】1:2【解析】【分析】过点D 作DH BF ∥,交AC 于H ,根据平行线分线段成比例定理得到CD CH DB HF=, AF AE FH ED=,根据线段中点的性质得到BD DC =,AE ED =,得到CH HF =,AF FH =,计算即可 本题考查的是平行线分线段成比例定理,灵活运用定理、找准对应关系是解题的关键.【详解】解:过点D 作DH BF ∥交AC 于H ,则CD CH DB HF=,AF AE FH ED = AD 是ABC △的中线,E 是AD 的中点,BD DC ∴=,AE ED =, CH HF ∴=,AF FH =:1:2AF FC ∴=.故答案为:1:2.15.【解析】【分析】根据一元二次方程的解及根与系数的关系,可得出21131x x −=−,123x x +=,再整体代入到211252x x x −−中,即可求解.【详解】解: 一元二次方程2310x x −+=的两根为1x ,2x ,21131x x ∴−=−,123,x x +=22112111252322x x x x x x x ∴−−=−−−()21112321237x x x x =−−+=−−×=−.故答案为:7−.【点睛】本题考查了一元二次方程的解及根与系数的关系,解题的关键是得到21131x x −=−,123x x +=. 16.【答案】①③④【解析】【分析】根据DE BC ∥,得出ADG ABF △∽△,AEG ACF △∽△,根据相似三角形的性质,即可判断①;根据平行线的性质得出AGD AFB ∠=∠,根据三角形的外角的性质得出AFB ACF ∠>∠,继而得出AGD ACF ∠>∠,则可判断②;证明AEG ACF △∽△,进而得出13EG CF =,根据DHG CHF △∽△,设GH k =,则3HF k =,得出13AG AF =,进而证明AH HF =,即可判断③;证明AGE ACF △∽△,根据相似三角形的性质得出9ACFAGE S S =△△,即可判断④.【详解】解:DE BC ∥, ADG ABF ∴△∽△,AEG ACF △∽△,,AG DG AG EG AF BF AF CF∴==,DG EG BF CF ∴=. BF CF = ,DG EG ∴=.∴①的结论正确;DE BC ∥,AGD AFB ∴∠=∠.AFB ACF ∠>∠ ,AGD ACF ∴∠>∠,AGD ∴△与ACF △不可能相似.∴②的结论不正确;CG DE ⊥ ,DG EG =,CG ∴垂直平分DE ,6CE CD ∴==,9AC AE CE ∴=+=.DE BC ∥,AEG ACF ∴△∽△,3193AG EG AE AF CF AC ∴====,13EG CF ∴=, DG EG = ,13DG CF ∴=.DE BC ∥,DHG CHF ∴△∽△,13GH DG HF CF ∴==, 设GH k =,则3HF k =,13AG AF = ,143AG AG k ∴=+,2AG k ∴=.3AH AG GH k ∴=+=,AH HF ∴=, ∴点H 是AF 的中点.∴③的结论正确;BF CF = ,ABF ACF S S ∴=△△. DE BC ∥,AGE ACF ∴△∽△,221139AEG ACF S AE S AC ∴=== △△. 9ACF AGE S S ∴=△△. 9ABF AGE S S ∴=△△.∴④的结论正确.综上,正确的结论有:①③④,故答案为:①③④.【点睛】本题考查了相似三角形的性质与判定,掌握相似三角形的性质与判定是解题的关键.三、解答题:本题共9小题,共86分.解答应写出文字说明,证明过程或演算步骤.17.【答案】12【解析】【分析】将各个特殊角的三角函数值代入求解即可.【详解】解:2cos30tan 60sin 45cos 45°−°°°11222=++=. 【点睛】题目主要考查特殊角的三角函数值的计算,熟练掌握各个特殊角的三角函数值是解题关键.18.【解析】【分析】本题主要考查了解一元二次方程,直接利用公式法解方程即可.【详解】解:22330x x −−= ,2a ∴=,3b =−,3c =−,()()23423330∴∆−−××−>,x ∴=,解得1x =2x = 19.【答案】(1)见解析 (2)见解析【解析】【分析】本题考查了位似图形的性质,找位似中心.(1)连接对应点并延长,交点即为位似中心;(2)由(1)可知,:1:2OC OC ′=,则连接OB 并延长,使2OB OB ′=,再连接AB ′、B C ′即可.【小问1详解】解:如图所示:点O 即为位似中心;【小问2详解】解:补全A B C ′′′△如图所示:20.【答案】见解析【解析】【分析】根据三角形内角和定理可得B AED ∠=∠,即可证明ADE ACB △∽△. 【详解】证明:60A °∠=,50ADE ∠=°, 18070AED A ADE ∴∠=°−∠−∠=°,70B ∠=° ,B AED ∴∠=∠,A A ∠=∠ ,ADE ACB ∴△∽△.【点睛】本题主要考查了相似三角形的判定,熟练掌握相似三角形的判定定理是解题的关键.21.【答案】(1)2k > (2)3k =【解析】【分析】(1)根据一元二次方程有两个不相等的实数根,得出240b ac −>,把字母和数代入求出k 的取值范围;(2)根据两根之积为:c a ,把字母和数代入求出k 的值. 【小问1详解】解:()224241384b ac k k −=−××−=−+,有两个不相等的实数,840k∴−+>, 解得:2k >;【小问2详解】方程的两个根为α,β,3c k aαβ∴==−, 233k k k ∴=−+,解得:13k =,21k =−(舍去).即:3k =. 【点睛】本题主要考查根与系数的关系、根的判别式,解题的关键是掌握1x ,2x 是方程20ax bx c ++=的两根时,12b x x a +=−,12c x x a⋅=.22.【答案】(1)边AB 的长为15米;(2)羊圈的总面积不能为480平方米.理由见解析【解析】【分析】本题主要考查一元二次方程的应用,理解题意,弄清数量关系是解题的关键. (1)设边AB 的长为x ,则()834ADx =−米,然后根据矩形面积公式可列出一元二次方程并求解即可获得答案;(2)由(1)可得()834480xx −=,然后根据一元二次方程根的判别式可获得答案. 【小问1详解】设边AB 的长为x ,依题意得:()834345xx −= 整理得:24833450x x −+=解得:115x =,2234x =, 当234x =时,8346050x −=>,不合题意 15x ∴=答:边AB 的长为15米;【小问2详解】设边AB 的长为x ,依题意得:()834480xx −=整理得:24834800x x −+= ()283444807910∆−−−××=−<∴此方程无解,故羊圈的总面积不能为480平方米.23.【答案】(1)旗杆AB 的高度约为11.6m(2)测量方案一见解析,旗杆AB 的高度为2.50.8m a b a+ 【解析】【分析】本题考查了解直角三角形的应用-仰角俯角问题,正确作出辅助线,构造出直角三角形模型是解决问题的关键.(1)过点C 作CH AB ⊥于点H ,在Rt ACH △中,利用tan AH CHα=代数求解即可; (2)测法一:测量工具:皮尺,标杆,测量数据:m DF a =,m BF b =,如图2,过点C 作CG AB⊥于点H ,交EF 于点G ,求出CGDF a ==, 2.50 1.700.80EG EF GF =−=−=,CH DB DF BF a b ==+=+,证明出CEG CAH △∽△,得到EG CG AH CH=,然后代数求解即可; 测法二:测量工具:皮尺,标杆,测量数据:影长m DF a =,影长m BC b =,如图4,证明出EFD ABC △∽△,得到EF DF AB CB=,然后代数求解即可; 测法三:测量工具:皮尺,镜子,测量数据:DM a =,BM b =,如图5,证明出CDM ABM △∽△,得到CD DM AB BM =,然后代数求解即可. 【小问1详解】如图1,过点C 作CH AB ⊥于点H .图1CD BD ⊥ ,AB BD ⊥,15.20CH DB ∴==, 1.70HBCD ==. 在Rt ACH △中,tan AH CHα= tan 15.20tan 3315.200.659.88AH CH α∴=⋅=×°≈×≈,()9.88 1.7011.6m AB AH HB ∴=+≈+≈.答:旗杆AB 的高度约为11.6m .【小问2详解】测法一:测量工具:皮尺,标杆.如图2,AB 表示旗杆,小明的目高 1.70m CD =,标杆 2.50m EF =,点D ,F ,B 在同一水平线上, 点C ,E ,A 在同一条直线上,且AB BD ⊥,CD BD ⊥,EF BD ⊥.测量数据:m DF a =,m BF b =.如图2,过点C 作CG AB ⊥于点H ,交EF 于点G .图2AB BD ⊥ ,CD BD ⊥,EF BD ⊥,CD EF AB ∴∥∥,CG AB ⊥ ,EF CG ∴⊥,CG DF a ∴==, 2.50 1.700.80EG EF GF =−=−=,CH DB DF BF a b ==+=+,在CEG △和CAH △中,90CGE CHA °∠=∠= ,ECG ACH ∠=∠CEG CAH ∴△∽△,EG CG AH CH ∴=,即0.8a AH a b=+, 解得()0.8a b AH a +=, ()0.8 2.50.81.7a b a b AB AH BH a a ++∴=+=+=, 即旗杆AB 的高度为()2.50.8m a b a+; 测法二:利用“在同一时刻,物体的高度与它在阳光下的影长成正比”原理测量,测量工具:皮尺,标杆.如图4,AB 表示旗杆,标杆 2.50m EF =,点D ,F ,C ,B 在同一条水平线上,AB BD ⊥,EF BD ⊥.测量数据:影长m DF a =,影长m BC b =.图4太阳光线是平行光线,EDF ACB ∴∠=∠,90EFD ABC ∠=∠=° ,EFD ABC ∴△∽△,EF DF AB CB ∴=,即2.5a AB b=,()5m 2b AB a ∴=. 测法三:利用“光的反射原理”测量.测量工具:皮尺,镜子.如图5,AB 表示旗杆,点M 表示镜子,小明的目高 1.70m CD =,CD BD ⊥,AB BD ⊥.图5测量数据:DM a =,BM b =.反射角λ=射角,CMD AMB ∴∠=∠,CD BD ⊥ ,AB BD ⊥,90CDM ABM ∴∠=∠=°,CDM ABM ∴△∽△,CD DM AB BM∴=, 即1.7a AB b =,()1.7m b AB a ∴=. 24.【答案】(1)10,4t ,5t (2)1t =或3241 (3)78 【解析】【分析】(1)首先分别令0x =和0y =求出()0,8B ,()6,0A ,然后利用勾股定理求出10AB ,然后根据题意表示出OP 和BQ ;(2)若AOB △和以B 、P 、Q 为顶点的三角形相似时,则存在90BPQ ∠=°或90BQP ∠=°, 则4cos 5BP B BQ ==或45BQ BP =,即可求解; (3)由(1)知,5BQ t =,过点Q 作QN y ⊥轴于点N ,表示出3NQ t =,然后得到POH HAO ∠=∠,推出tan tan POH HAO ∠=∠,得到NQ PO NO OA =,然后代数求解即可. 【小问1详解】 解:直线483y x =−+与x 轴交于点A ,与y 轴交于点B , 当0x =时,4883y x =−+= ()0,8B ∴,8OB ∴=当0y =时,4083x =−+解得6x =,()6,0A ∴,6OA ∴=10AB ∴=,动点P、Q 分别从O 、B 同时出发,其中点P 以每秒4个单位的速度沿OB 向终点B 运动,点Q 以每秒5个单位的速度沿BA 向终点A 运动4OP t ∴=,5BQ t =;【小问2详解】解:8OB = ,4OP t =,84PB OB OP t ∴=−=−,若AOB △和以B 、P 、Q 为顶点的三角形相似时,则存在90BPQ ∠=°或90BPQ ∠=°, 则84cos 105BP OB B BQ AB ====或85BQ OB BP AB ==, 即54845t t =−或84455t t −=, 解得:1t =或3241; 【小问3详解】解:由(1)知,5BQ t =,过点Q 作QN y ⊥轴于点N ,则4cos 545BN BQ B t t ==×=,则3NQ t =, 84ON BO BN t ∴=−=−, AP OQ ⊥ ,90POA OHA ∴∠=∠=°90POH HOA HAO HOA ∴∠+∠=∠+∠=°POH HAO ∴∠=∠,tan tan POH HAO ∴∠=∠NQ PO NO OA∴=,即34846t t t =− 解得:0t =(舍去)或78. 【点睛】本题考查的是一次函数综合运用,涉及到三角形相似、解直角三角形、中位线的性质勾股定理等知识,有一定的综合性,难度适中,解题的关键是掌握以上知识点.25.【答案】(1)12CE BE = (2)①1214S S =;②11tan 2DAB ∠= 【解析】【分析】(1)证明DEC AEB △∽△,即可得到答案; (2)①证明AED BEC ∽,进一步得到ABC ACB ∠=∠,则10AC AB ==, 设CE x =,则10AEx =−,由勾股定理可得2222AB AE BC CE −=−, 即()(22221010x x −−=−,解得4x =,即4CE =. 在Rt BCE △中,由勾股定理得到8BE =,根据相似三角形的性质即可得到答案;②过点D 作DG AB ⊥于点G ,求出6AE =,由相似三角形的性质得到3DE =,则11BD =, 由解直角三角形得到3344,55DG BG ==,则4461055AG AB BG =−=−=,根据正切的定义即可得到答案.此题考查了相似三角形的判定和性质、解直角三角形、勾股定理等知识,熟练掌握相似三角形的判定和性质是解题的关键.【小问1详解】如图1.图1DCA DBA ∠=∠ ,DEC AEB ∠=∠,DEC AEB ∴△∽△,12CE DC BE AB ∴==; 【小问2详解】①如图1,由(1)得:DEC AEB △∽△,DE CE AE BE∴=, DEA CEB ∠=∠ ,AED BEC ∴△∽△,ADB ACB ∴∠=∠,ABC ADB ∠=∠ ,ABC ACB ∴∠=∠,10AC AB ∴==;设CE x =,则10AE x =−, AC BD ⊥ ,2222AB AE BC CE ∴−=−, 即:()(22221010x x −−=−, 解得4x =,即4CE =, 在Rt BCE △中,8BE =, DEC AEB △∽△,22124184S CE S BE ∴=== ; ②如图3,过点D 作DG AB ⊥于点G ,图3由①知:4CE =,8BE =, 1046AE AC CE ∴=−=−=, AED BEC △∽△,DE AE CE BE ∴=,即648DE =, 3DE ∴=,8311BD BE DE ∴=+=+=, 在Rt ABE △和Rt BDG △中, 3sin 5AE ABE AB ∠== ,4cos 5BE ABE AB ∠==, 3sin 5DG DBG BD ∴∠==,4cos 5BG DBG BD ∠==, 331133555BD DG ×∴===,441144,555BD BG ×=== 4461055AG AB BG ∴=−=−=,11tan 2DG DABAG ∴∠==.。
Bussmann 断路器和熔断器数据手册说明书

O B SO LE T E SD I S C O N NE C T SW I T E S C A T A L O G 12-17-98SB98107Rev. AForm No. FD Page 1 of 2BIF Doc #1122The only controlled copy of this BIF document is the electronic read-only version located on the Bussmann Network Drive. All other copies of this document are by definition uncon-trolled. This bulletin is intended to clearly present comprehensive product data and provide technical information that will help the end user with design applications. Bussmann reserves the right, without notice, to change design or construction of any products and to discontinue or limit distribution of any products. Bussmann also reserves the right to change or update,without notice, any technical information contained in this bulletin. Once a product has been selected, it should be tested by the user in all possible applications.Catalog Symbols*:FD200J3, FD400J3, FD600J3,FD800L3Ampere Rating: 200, 400, 600, 800 Amperes Voltage Rating: 600 Volts Agency Approvals:UL Listed, Guide WPZX, File E155130CSA Certified, File 58077M9IEC 947-1General Information:Bussmann fused disconnect switches are UL 98/CSA 22.2 No. 4devices. This makes them suitable for use on service equipment,panel boards, switchboards, industrial control equipment, motor control centers, etc.*Catalog symbol is for switch only . Handles and shafts are ordered separately.FD200J3FD400J3FD600J3, FD800L3Fuse Maximum Horsepower Rating Type 200V 208V 240V 480V600VFD200J3J†505060125150FD400J3J†100125125250350FD600J3J†150150200400500FD800L3L 200200250500600†Class J fuses are standard. For 600V , Class T fuses, see table below.Class T Adapters200A BDTA2400A BDTA4600ABDTA6Components:HandlesGrip NEMA Length Padlock-Defeat-Catalog Style Type Color (Inches)Marking able ableNumber 200A ( 0.47˝ x 0.47˝)Pistol1, 3R, 12Blk4.72Off/On Yes Yes BDH53200-800A ( 0.47˝ x 0.47˝)Pistol 1, 3R, 12Blk 5.71Off/On Yes Yes BDH16Pistol 1, 3R, 4, 4X, 12Blk5.71Off/OnYesNoBDH35Terminal Lug Kits - Kit Includes 6 LugsAmp Rating Wire SizeWire Type Kit Catalog Number200#6 - 300 kcmil Cu/Al BDTL25400#2 - 600 kcmil Cu/Al BDTL26600 & 800(2) #2 - 600 kcmilCu/AlBDTL27ShaftsMounting Depth**Shaft LengthCatalog Number200 - 400 Amps ( 0.47˝ x 0.47˝)7.87 - 12.208.66BDS2209.05 - 13.389.84BDS25010.22 - 14.5411.00BDS28012.0 - 16.3212.78BDS32514.78 - 19.1015.56BDS39517.53 - 21.8518.31BDS46520.28 - 24.6221.06BDS535600 - 800 Amps ( 0.47˝ x 0.47˝)10.04 - 12.839.84BDS25011.20 - 14.0011.00BDS28012.98 - 15.7712.78BDS32515.76 - 18.5515.56BDS39518.51 - 21.3018.31BDS46521.06 - 24.0821.06BDS535**Mounting depth is the distance from the outside of door to the disconnect switch mounting plate. Shaft can be cut to desired length.Accessories:Fuse Covers and Terminal Shrouds (line-side)Switch Type Fuse Covers Terminal ShroudsAmp Fuse Catalog Catalog RatingTypeVoltage Number Number200J or T 600V BFDC200‡BDTSF2400J 600V BFDC400‡BDTSF4600, 800J or L600VBFDC600‡BDTSF6‡Fuse covers come standard on 200-800 amp switches.Auxiliary Contacts - F200 through F800Switch Aux. Contact Voltage 1 N.O. & 1 N.C. 2 N.O. & 2 N.C.Amp Rating Amp Rating Catalog Number Catalog Number200-80010600BDAUX1BDAUX2Form No. FD Page 2 of 2BIF Doc #112212-17-98SB98107Rev. A200 Amps400 AmpsDimensional Data 600 & 800 Amps。
无人机驾驶考试2022年理论知识模拟试题4-剖析精选全文完整版

可编辑修改精选全文完整版无人机驾驶考试2022年理论知识模拟试题4(总分:71.00,做题时间:90分钟)一、单项选择题(总题数:71,分数:71.00)1.()是无人机完成起飞、空中飞行、执行任务、返场回收等整个飞行过程的核心系统,对无人机实现全权控制与管理,因此该子系统之于无人机相当于驾驶员之于有人机,是无人机执行任务的关键。
(分数:1.00)A.飞控计算机B.飞控子系统JC.导航子系统解析:2.飞控子系统必须具备的功能为()。
(分数:1.00)A.无人机姿态稳定与控制,无人机飞行管理,应急控制VB.无人机飞行管理,与导航子系统协调完成航迹控制,信息收集与传递C.无人机起飞与着陆控制,无人机飞行管理,信息收集与传递解析:3.飞控子系统可以不具备如下功能?()。
(分数:1.00)A.姿态稳定与控制B.导航与制导控制C.任务分配与航迹规划V解析:4.属于无人机飞控子系统功能的是()。
(分数:1.00)A.无人机姿态稳定与控制VB.导航控制C.任务信息收集与传递解析:5.不属于无人机飞控子系统所需信息的是()。
(分数:1.00)A.经、纬度VB.姿态角C.空速解析:6.不应属于无人机飞控计算机任务范畴的是()。
(分数:1.00)A.数据中继VB.姿态稳定与控制C.自主飞行控制解析:7.无人机在增稳飞行控制模式下,飞控子系统()控制。
(分数:1.00)A.参与VB.不参与C.不确定解析:8.以下不是导航飞控系统组成部分的是()。
(分数:1.00)A.传感器B.电台VC.执行机构解析:9.下列哪项是飞行控制的方式之一?()。
(分数:1.00)A.陀螺控制B.指令控制VC.载荷控制解析:10.导航子系统功能是向无人机提供()信息,引导无人机沿指定航线安全、准时、准确的飞行。
(分数:1.00)A.高度、速度、位置JB.角速度C.角加速度解析:11.无人机通过()控制舵面和发动机节风门来实现无人机控制。
(分数:1.00)A.伺服执行机构JB.操纵杆C.脚蹬解析:12.无人机电气系统中电源和()两者组合统称为供电系统。
江西省九江市民办晨光中学2024-2025学年九年级上学期期中考试物理试题(无答案)
九江市民办晨光中学2024-2025上学期期中考试初三物理试卷命题人: 审题人:注意事项:①本卷为试题卷,全卷四个大题,共21小题,共6页;满分:80分②考生必须在答题卡上解答。
答案应书写在答题卡的相应位置上,在试题卷、草稿纸上作答无效③本卷g 取10N/Kg 。
一、填空题(共16分,每空1分)1.功率是表示做功_______的物理量;_______是表示物质的吸、放热性能的物理量.2.为了达到更好的消毒效果,武汉市利用雾炮车水平匀速行驶过程中向大街上喷洒消毒液,如图所示,在消毒过程中,雾炮车的动能_______(选填“增大”“减小”或“不变”);重力对雾炮车_______(选填“做了功”或“没有做功”)。
3.焦炭的热值是完全燃烧200g 的焦炭放出的热量为_______J .内燃机的一个工作循环中,有_______次内能与机械能相互转化的过程.4.小薇同学去商场购物,站在匀速上升的扶梯上,她的机械能将_______(选填“增加”“不变”或“减少”);若以扶梯为参照物,她是_______(选填“静止”或“运动”)的.5.电动自行车具有轻便、节能、环保等特点,给电动自行车电瓶充电时电瓶相当于电路中的_______(选填“开关”、“用电器”或“电源”);冬天骑电动自行车会感到很冷,骑手常在停车后用搓手取暖,这是通过_______方式改变了物体内能.6.做饭时用天然气做燃料来取代煤炭,是因为天然气的_______高,且清洁污染小;铜的比热容比铝的比热容小,质量和初始温度相同的铜块和铝块,放出相同的热量后再相互接触,则热量是从_______(选填“铜块传到铝块”或“铝块传到铜块”)。
7.如图所示,验电器原来不带电,用丝绸摩擦过的玻璃棒接触验电器的金属球,两金属箔片由于带_______电荷互相排斥而张开,接触的瞬间电流方向是_______(填“由棒到箔片”或“由箔片到棒”)。
7310J /kg,8.如图所示,要使灯组成串联电路,则应闭合开关_______;要使灯组成并联电路,则应闭合开关_______.二、选择题(共14分,把你认为正确选项的代号填在答题卷的相应位置上。
眼睛七级伤残鉴定标准

眼睛七级伤残鉴定标准眼睛七级伤残鉴定标准是指根据《中华人民共和国劳动能力鉴定暂行办法》中的相关规定,对眼睛受伤程度进行严格评定的标准。
根据这一标准,眼睛受伤的程度可分为七个等级,从轻微伤到严重伤残,每个等级都有相应的鉴定标准和评定依据。
下面将详细介绍眼睛七级伤残鉴定标准的相关内容。
一级,视力损失5%以下。
这一级别的伤残属于轻微程度,通常表现为轻微的视力损失,对日常生活和工作影响较小。
鉴定时需要进行视力测试,并根据测试结果确定伤残等级。
二级,视力损失5%-10%。
这一级别的伤残已经有了一定程度的影响,但仍然属于较轻的情况。
视力测试结果显示视力损失在5%到10%之间,对工作和生活的影响已经比较明显。
三级,视力损失10%-20%。
这一级别的伤残已经比较明显,视力损失在10%到20%之间,对工作和生活的影响已经比较严重,需要进行相应的鉴定和评定。
四级,视力损失20%-30%。
这一级别的伤残已经相当严重,视力损失在20%到30%之间,对工作和生活的影响已经非常明显,需要进行详细的鉴定和评定。
五级,视力损失30%-50%。
这一级别的伤残属于重度程度,视力损失在30%到50%之间,对工作和生活的影响已经非常严重,需要进行严格的鉴定和评定。
六级,视力损失50%-70%。
这一级别的伤残属于严重程度,视力损失在50%到70%之间,对工作和生活的影响已经非常严重,需要进行严格的鉴定和评定。
七级,视力损失70%以上。
这一级别的伤残属于极重程度,视力损失在70%以上,对工作和生活的影响已经非常严重,需要进行非常严格的鉴定和评定。
根据以上七级伤残鉴定标准,对眼睛受伤程度进行评定时,需要根据具体的视力损失情况进行鉴定,确保评定结果准确、公正。
同时,对于受伤者的工作和生活影响也需要进行全面的评估,以便确定相应的伤残等级和赔偿标准。
总之,眼睛七级伤残鉴定标准是对眼睛受伤程度进行严格评定的标准,对于受伤者的权益保护和赔偿给付具有重要意义。
汉京系统故障码大全

汉京系统故障码大全几乎所有的汽车都是由电脑控制的,每当你的X7车发生状况的时候,电脑马上就会提示你,但电脑会通过特殊的代码来表示异常,每种代码代表着一种X7车的故障。
具体故障代码因汉腾车型不同而含义不同。
车主一旦遇到报错,可以及时查询对应的X7故障代码,大部份问题处理,最好由汉腾专业技工完成,如果想自己动手清除X7故障码的话,那就要留意下面的知识。
每当排除汽车故障后,需要清除故障码。
清除X7故障码的时候,事必要按照对应汉腾车型所规定的故障码的清除方法来清除,一定不可随便地用拆除电池的负极的办式来清除汽车故障码。
否则,有可能会出现下面提到的两种情况异常:第一,使某些车型的控制电脑失去“经验记忆”,我们知道,有些车型的控制电脑具有自动记忆功能,如果拿掉电池负极的连接线后,就会自动清除存储在随机存储器(RAM)中发动机运行的经验数据,这就为什么有些人发现维修清除后,发现很长一段时间性能表现都不咋滴或者驾驶不久,又会出现之前的故障码;第二,还会造成X7某些功能的丧失,例如常常丢失音响锁止这个功能,这时,则需要按照较为烦琐的程序对音响系统进行解密,才能恢复音响系统的正常工作。
故障代码P0开头:故障说明P0AA7:混合动力电池电压隔离传感器电路P0026:进气阀门控制电磁阀电路范围/性能(第1排)P02DB:喷油器补偿学习在最高限气缸8P0C73:电机电子设备冷却液泵A控制性能P0925:换档后拉执行器(后拉换档杆,偶数齿轮,2,4,6)电路范围/性能P0945:液压泵继电器电路/开路P0755:换档电磁阀BP042C:催化转换器温度传感器电路低(第1排,传感器2)P0280:第7缸喷油器电路高P0017:曲轴位置/凸轮轴位置相关性(第1排,传感器B)故障代码P1开头:故障说明P129D:进气歧管压力 - 最大压力不正确P1570:防盗读取线圈P1150:加热氧传感器 - 信号太低(第2排,传感器2)P1653:驱动防滑牵引力控制系统(TCS)扭矩控制电路故障。
河南省南阳市淅川县2023-2024学年九年级上学期期中物理试卷(含解析)
2023-2024学年河南省南阳市淅川县九年级(上)期中物理试卷一、填空题(本题共6小题,每空1分,共14分)1.(2分)家用电冰箱利用液态制冷剂作为热的“搬运工”,把冰箱里的“热”“搬运”到冰箱的外面。
在冷冻室里,通过制冷剂的 (填物态变化名称)吸收热量;在冰箱外,通过制冷剂的 (填物态变化名称)放出热量,实现对“热”的“搬运”。
2.(2分)如图是汽油机的某冲程,该冲程是 冲程。
某单缸四冲程汽油机的飞轮动速度是2400r/min,则此汽油机每秒对外做功 次。
3.(3分)电动自行车是生活中常见的交通工具,充电过程中是将电能转化为 能;它的两个转向灯是 联的,车把上的调速器和电动机是 联的。
4.(2分)如图所示为国产油电混合动力汽车,给汽车蓄电池充电时,蓄电池相当于 (选填“用电器”或“电源”);干毛巾刚擦完车玻璃,很容易吸附灰尘 。
5.(3分)在如图所示的电路中,当只有开关S2闭合时,L1、L2为 联;当只有开关S1、S3闭合时,L1、L2为 联;为了防止电路发生短路,不可以同时闭合开关 。
6.(2分)如图甲所示是电阻R和灯泡L的I﹣U图象,由图可知,电阻R的阻值是 Ω,将电阻R和灯泡L接在图乙电路中,S闭合,则电源电压为 V。
二、选择题(本题共8小题,每小题2分,共16分。
第7~12题每小题只有一个选项符合题目要求,第13~14题每小题由两个选项符合题目要求,全部选对得2分,选对但不全的得1分,有选错的得0分)7.(2分)下列图中的自然现象,由于液化形成的是( )A.冰凌消融B.霜满枝头C.露珠晶莹D.大雪纷飞8.(2分)如图四张图中利用热传递来改变物体内能的是( )A.向手哈气取暖B.钻木取火C.小孩下滑时臀部发热D.摩擦燃烧火柴9.(2分)如图所示下列关于静电现象,说法正确的是( )A.如图:轻质泡沫塑料小球相互吸引,则两小球一定带有异种电荷B.如图:验电器是利用了同种电荷相互排斥的原理制成的C.如图:丝绸摩擦过的玻璃棒会带上正电荷,在这个过程中丝绸会失去电子D.如图:摩擦后的气球能够吸引细水流,是因为异种电荷相互吸引10.(2分)一杯酒精用掉了一半,则剩余酒精的情况是( )A.质量变为原来的一半,密度、比热容和热值不变B.质量和密度变为原来的一半,比热容和热值不变C.质量和热值变为原来的一半,密度和比热容不变D.质量、密度、比热容和热值都不变11.(2分)如图所示,某同学设计一个楼道照明“智能化”电路,即利用“光控开关”(天黑时自动闭合,天亮时自动断开)(当有人走过发出声音时,自动闭合,无人走过没有声音时,自动断开)来控制灯泡。
JUKI 7系列错误代表
0E0000Message file error < %02d-%d >A 1E0001Window make error < %02d >A 2E0002Task error < %02d-%x >A 3E0003Task error < %02d-%x >A 4E0004Task error < %02d-%x >A 5E0005Task error < %02d-%x >A 6E0006Message error < %02d-%d >A 7E0007Initialization error< %02d-%x >A 8E0008Exit process error< %02d-%x >A 10E0010EPU environment file can't be opened.A 11E0011Station environment file can't be opened.A 12E0012Program directory can't be found.A 200E0200File I/O Error < %02d-%d >A 201E0201File I/O Error < %02d-%d >A 202E0202File I/O Error < %02d-%d >A 203E0203File I/O Error < %02d-%d >A 204E0204File I/O Error < %02d-%d >A 205E0205Directory name is not correct A 206E0206File name is not correct.A 207E0207Directory already exists.A 208W0208File already exists. Overwrite ?B 209E0209Root directory A 210E0210Date format is wrong.A 211E0211Time format is wrong.A 212E0212File exists under specified directory.A 213E0213Insufficient memory A 214W0214Delete '%s' Are you sure?B 215E0215Too may files exist. Please change directory.A 216E0216Insufficient memory. Can't be formatted.A 217E0217System error. Can't be formatted.A 300W0300Current data will be lost. Continue?B 301E0301File number exceeds limit.A 302E0302File I/O Error < %02d-%d >A 303E0303This data can't be used.A 304E0304No data to be saved A 305E0305Insufficient disk space.A 306E0306File I/O Error < %02d-%d >A 307E0307No file available A 308E0308Incorrect file name.A 309W0309File exists. Overwrite? B 310E0310Insufficient memory.A 311E0311File cannot be used with this model.A312E0312Unusable due special file name A 313E0313File exists. A 314E0314Could not write file.A 315W0315Exchange the KE730 data for the KE730plus data.|Please oA 316W0316Exchange the KE730plus data for the KE730 data.|Please oA 999E0999Can't find protect module.A 2000E2000Error editing production program.A 2002E2002Memory can't be saved. A 2003E2003Data out of range.A 2004E2004Input is wrong. A 2005E2005Too many characters.A 2010E2010PWB data is incomplete. A 2011E2011Placement data is incomplete.A 2012E2012Component data is incomplete.A 2013W2013Not a vision centered component. A 2014E2014This component can't be placed. A 2015E2015Can't copy mark vision data.A 2016E2016Reference data does not exist. A 2017E2017Entry data is full. Overwrite data at cursor position? B 2018E2018Entry name is already registered. Overwrite? B 2020E2020Return to Home Position is not finished yet. A 2021E2021%s is not finished yet. Unable to optimize. A 2022E2022PWB conveyor error<%04xH >A 2030E2030Database is not available in Setup data.A 2031W2031Pick data will be changed. Are you sure? B 2032E2032Unable set due to input data under feeder count.A 2033W2033Different types of stick feeders have been set for the sC 2100E2100Too many characters.A 2101E2101No items selected.A 2102E2102Input data exceeds 400 circuits.A 2103E2103Numeric data required.A 2104E2104Unable set due to input data beyond set area.A 2105E2105Development data not set. A 2106W2106Circuit is outside PWB.A 2107W2107BOC mark is beyond range. A 2108W2108Bad mark is beyond range. A 2109W2109Circuit is outside PWB.B 2110W2110BOC mark is beyond range. B 2111W2111Bad mark is beyond range. B 2112E2112PWB shape dimension or circuit shape dimension is not seA 2113E2113Circuit configuration is not complete. A 2114E2114BOC mark error < point %d >A 2115E2115No PWB error A 2200E2200Duplicate component ID.A 2201E2201 '+=' can't be used in 1st line. A 2202E2202No data in previous line. A 2203E2203Initial value is not defined.A2204E2204Component data is full. A 2205E2205Mark data is full. A 2206E2206No optimization data. A 2207E2207No placement data. A 2208W2208Placement position is outside PWB or circuit(%d point) B 2209W2209IC mark is beyond range B 2210E221010,000 placements exceeded. A 2211E2211Duplicate component name.A 2212E2212Duplicate component name.A 2213E2213Cannot use LA head with vision centering.A 2214E2214Specified range is over.A 2215E2215Specified pitch is too large.A 2216E2216Pitch is abnormal.A 2217E2217Data is nothing.A 2218E2218Data is nothing.A 2219E2219Copy number is wrong.A 2220E2220Line number is wrong.A 2221E2221Specified data is not found.A 2222E2222Unable to select head due to set pick position.A 2223E2223Not component name cell.A 2224E2224No component data.A 2225E2225Copy data exceeds limit.A 2226W2226Component dimension change to suitable value.A 2401E2401Window can't be created. A 2402E2402Temporary can't be created. A 2403E2403Invalid data.A 2405E2405Incorrect value.A 2406E2406Value exceeds limit.A 2407E2407Cannot use vision centering with LA head.A 2408E2408Unable to select component with LA head. A 2409E2409Unable to select laser centering.A 2410E2410Unable to select vision centering. A 2411W2411Changing to a single tray of components. OK? B 2412W2412Changing to a single tray of components. OK? B 2413E2413Package is already assigned. A 2414E2414No lane vacant. A 2415E2415Number is registered more than once. A 2416E2416Tray holder registered more than once.A 2417E2417Lane number incorrect for this type. A 2418E2418Type can't be changed.A 2419E2419Lane is allocated. A 2420E2420Unable to allocate type 1.A 2421E2421Calculated XY Position is out of range. A 2422E2422Unable to allocate type 2.A 2423E2423Cannot use MTC but right head.A 2424E2424IC conveyor belt is assigned. A 2425E2425Other lane is assigned.A2451E2451Maximum feeder position exceeded. A 2452E2452Unable to delete. A 2453E2453Component name can't be found.A 2460E2460Belt feeders must be mounted on front bank only.A 2499E2499Program error A 2501E2501Window can't be created. A 2502E2502Temporary can't be created. A 2505E2505Incorrect value. A 2506E2506Value exceeds limit. A 2507E2507Data value can't be changed. A 2511E2511Missing start number is incorrect. A 2512E2512Missing number is incorrect. A 2513E2513Missing start/Number can't be cleared. A 2599E2599Program error. A 2600E2600Mark teaching not end.A 4000E004000Memory allocation error A 4001E004001There is no input character.A 4002E004002Input character has irregularities.A 4003E004003Input value exceeds predetermined data range.A 4004E004004Window create error(%s)A 4010E004010Password is different from a predetermined one.A 4011E004011Nozzle is set on %s. | Remove the nozzle. | Nozzle movesA 4012E004012Nozzle is not set on %s. | Set nozzle in position. | NozB 4013E004013Component of jig has not been picked up. | Check that jiA 4014E004014Center-to-center distance of marks cannot be measured.A 4015E004015Sensor has not been set to OFF state.A 4016E0040161\'st mark of CAL block cannot be detected.A 4017E004017Servo is in the free state.A 4018W004018Teached data is invalid.A 4020E004020Selected device can not move to this position. | PleaseA 4021E004021Selected device is not install. | Please reselect other A 4022E004022Selected device is disable. | Please reselect other deviA 4030E004030Error has occurred when detecting height of measuring plA 4040E004040Error has occurred when setting laser parameters. | CodeA 4041E004041Error has occurred during laser measurement(ONCE). | CodA 4042E004042Error has occurred during laser measurement(SWEEP). | CoA 4050E004050Error has occurred during acknowledgment of CAL piece B A 4051E004051Error has occurred during acknowledgment of mark. | CodeA 4052E004052Error has occurred when measuring center-to-center distaA 4053E004053Data has not been obtained.A 4054E004054Error has occurred during acknowlegment of jig componentA 4055E004055Error has occurred during acknowlegment of jig componentA 4060E004060Printer is not ready for operation.B 4100Q004100Reset I/O ?C 4101Q004101Exit ms parameter. | Set value is saved ?D 4102Q004102Return to home has not yet been completed. | Return to hC 4103Q004103Current set value will be lost. | Do you interrupt file C4104Q004104EEPROM will be erased. | Do you interrupt erase EEPROM ?C 4105Q004105Do you measured center of component ?C 4106Q004106Do you return component ?C 4110I004110Conveyor reference plane has been changed. | An attachmeB 4111I004111Transporting direction has been changed. | An attachmentB 4112I004112Remove the nozzle from %s.A 4113I004113Set nozzle on %s.A 4114I004114Component height(20mm) has been changed. | Design positiB 4115I004115 A kind of the %s was changed. | Standing with an initialB 4116I004116Because a head kind was changed standing the up is necesA 4117I004117PWB type has been changed. | An attachment position of uB 4120I004120Return to home. | Remove jig from CAL block.A 4121I004121File has been read.A 4122I004122File reading process has been interrupted.A 4123I004123EEPROM has been clear.A 4124I004124EEPROM clear process has been interrupted.A 4200E004200Memory allocation error A 4201E004201There is no input character.A 4202E004202Input character has irregularities.A 4203E004203Input value exceeds predetermined data range.|(Data rangA 4204E004204Window create error(%s)A 4214E004214Failure has occurred during measurement of nozzle shape A 4215E004215Nozzle of ATC %s is out of specifications. | Nozzle shapA 4217E004217Selected device can not move to this position. | PleaseA 4218E004218Selected device is not install. | Please reselect other A 4219E004219Return to home has not yet been completed.A 4220E004220MTC power off.A 4221E004221MTC offline A 4222E004222File I/O Error|Error code:%02d|File name:%s A 4223E004223There is no installed head.A 4224E004224Selected device is disable. | Please reselect other deviA 4225E004225MTC is disable.A 4226E004226Servo is in the free state.A 4227W004227Teached data is invalid.A 4228E004228Length of the nozzle is too short. | Please check the noA 4229E004229Vacuum is not ON.A 4232E004232MTC is in the supply state.A 4233E004233Password is different from a predetermined one.A 4300Q004300Reset I/O ?C 4301Q004301Exit machine setup. | Set value is saved ?D 4302Q004302Error has occurred during automatic measurement of nozzlC 4303Q004303Return to home has not yet been completed. | Return to hC 4304Q004304Error has occurred during attachment nozzle. | Move to pC 4305Q004305Extend shuttle ?C 4306Q004306Do you interrupt automatic measurement ?C 4307Q004307 A nozzle is fixed to %s. | Do return a nozzle and be autC 4310I004310Return to home of %s.A4311I004311Nozzle is removed from %s to ATC.A 4320I004320Set online for MTC.B 4321I004321Remove the nozzle from %s.A 4322I004322 A nozzle of %s is removed and return to %s of ATC.A 4400E004400Memory allocation error A 4401E004401There is no input character.A 4402E004402Input character has irregularities.A 4403E004403Input value exceeds predetermined data range.A 4404W004404There is no ATC that is allocated with nozzle. | AllocatA 4405W004405Nozzle is not set on head.A 4406E004406Selected device is not install. | Please reselect other A 4407E004407Return to home has not yet been completed.A 4408E004408Z axis limit has been exceeded.A 4409E004409MTC power off.A 4410E004410MTC offline A 4411E004411Window create error(%s)A 4412E004412Error has occurred when setting laser parameters. | CodeA 4413E004413Error has occurred during laser measurement(ONCE). | CodA 4414E004414Error has occurred during laser measurement(SWEEP). | CoA 4415E004415Data has not been obtained.A 4416E004416Servo is in the free state.A 4417E004417Data has irregularities.A 4418E004418Measurement mode is not assign.A 4419E004419Probe is not open.A 4420E004420Probe is not close.A 4421E004421Cannot measured for irregularities unit.A 4422E004422MTC is in the supply state.A 4423E004423Error has occurred during laser measurement(Image Check)A 4500Q004500Exit manual control. | Reset I/O ?B 4501Q004501Return to home has not yet been completed. | Return to hC 4502Q004502Cannot return component. | Trash component ?C 4503Q004503Do you interrupt process ?C 4510I004510Set online for MTC.B 4511I004511Remove the component from %s.A 4600E004600Memory allocation error A 4601E004601Window create error(%s)A 4800E004800Memory allocation error A 4801E004801Selected device is not install. | Please reselect other A 4802E004802Window create error(%s)A 4810E004810Mark on calibration jig for laser alignment has not beenA 4811E004811Nozzle No. 203 has not been allocated to ATC. | AllocateA 4812E004812Nozzle No. 106 has not been allocated to ATC. | AllocateA 4813E004813Calibration jig for laser alignment has not been picked A 4814E004814Mark on calibration jig for laser alignment has not beenA 4815E004815Measurement result exceeds limit value. | Check the MS pA 4816E004816Error between the locations of jig placed and calibratioA 4817E004817There is no installed head.A4818E004818There is no installed VCS.A 4820E004820Error has occurred when detecting height of measuring plA 4821E004821Error has occurred when setting parameter for laser. | CA 4822E004822Error has occurred during laser measurement (ONCE). | CoA 4823E004823Error has occurred during laser measurement (SWEEP). | CA 4824E004824Error has occurred during acknowledgment of mark. | CodeA 4825E004825Return to home has not yet been completed.A 4826E004826Nozzle No. 101 and No. 102 has not been allocated to ATCA 4827E004827Servo is in the free state.A 4828E004828Position of calibration jig for laser alignment has irreA 4829E004829Password is different from a predetermined one.A 4900Q004900Reset I/O ?C 4901Q004901Exit self calibration. | Set value is saved ?D 4902Q004902Return to home has not yet been completed. | Return to hC 4910I004910Remove calibration jig for laser alignment from calibratA 5001E5001Incorrect character has been input.A 5002E5002Input range has been exceeded. | (Input range: %s)A 5003E5002Input range has been exceeded. | (Input range: %ld - %ldA 5004W5004There is no data to be shown.A 5010E5010PWB data has not been completed.A 5011E5011Placement data has not been completed.A 5012E5012Component data has not been completed.A 5013E5013Pick-up data has not been completed.A 5014E5014Mark data has not been completed.A 5015E5015Vision data has not been completed.A 5016E5016Teaching of acknowledgment of BOC mark has not been compA 5017E5017Teaching of acknowledgment of IC mark has not been complA 5018E5018In accumulating PWB count mode, PWB production plan mustA 5020E5020PWB reference plane of MS parameter does not match referA 5021E5021PWB transporting direction of MS parameter does not matcA 5022E5022Shape reference has been selected in PWB data, but shapeA 5023E5023There is some placement data which place with a head thaA 5024E5024There is some component data which use VCS that is not iA 5030E5030Origin retrieval has not yet been completed.A 5031E5031Servo is turned OFF.A 5033E5033The machine has run out of components.A 5034E5034Air was down.A 5035W5035%s feeder bank is in lower position.A 5036E5036Machine was gone to abnormal state.A 5037W5037Dected %s feeder float.A 5038W5038MTC is in motion.|Please wait for stop.B 5039E5039Cover open.A 5040W5040You try to set remain less than level now, OK?C 5041E5041Error log file (GX3ERLOG.MSG) cannot be opened.A 5050E5050Head cannot reach place position. |Make sure in Program A 5051W5051Head cannot reach feeder pick position. |Production starC 5052W5052Head cannot reach tray holder pick position. |ProductionC5053E5053Illegal head assignment is in MTC supplying data. |Make A 5054W5054Pick posision is too far from calculated original posisiC 5055W5055There is some place points which uses no supplier. |ProdC 5056W5056There is not enough nozzle(No.%d) to product.|ProductionC 5057W5057There is too many nozzle(No.%d) to product.|Production sC 5060E5060There is some component(s) that is too small supply fromA 5061E5061Pick point is input range over for supply from MTC (M-%dA 5070I5070Pause as component protection. Take off component.A 5100Q5100Restart continuous production ?C 5101Q5101Please select Yes.C 5200W5200XY axis operation cannot be performed | since Z axis is A 5310E5310MTC Move Failed A 5320E5320MTC Power is Off.|Please Power On B 5321E5321MTC Emergency Switch is Pressed.|Please Release the SwitB 5322E5322MTC is No Original A 5323E5323MTC is Off-Line Condition.|Please Change to On-Line B 5324E5324MTC is Door Open Condition.|Please Close Door B 5325E5325MTC is Cover Open Condition.|Please Close Cover B 5326E5326MTC is Error Condition A 5327E5327MTC is Change Component Condition.|Please Release the ChB 5328E5328Component exists on the MTC Shuttle.|Please Remove CompoA 5500Q5500Is the component supply reset?B 5801E5801%s is inappropriate input data.A 5802E5801Inappropriate data has been input.A 5803E5802Input data on %s exceeds possible input range. | (Range:A 5804E5802Possible input range has been exceeded. | (Range: %s)A 5805E5803Tracing cannot be performed since the step No. is largerA 5806E5806No tracing data.A 5807E5807Too many tracing data.A 5880W5880Abort tracking.|OK ?B 5881Q5881Tracking was end.|Start production ?C 5900E5900Last tracking position.A 5999E5999Abnormal stop. (%ld)A 500001E500001Incomplete PWB data or Illagal BOC Pos.A 500002E500002Incomplete Placement data or Illagal Place Pos.A 500003E500003Illegal Local Fidu. Mark Pos.A 500004E500004Illegal Bad Mark Pos.A 500005E500005Illegal Component data Link Pointer on Placement data A 500006E500006Illegal Laser Align Placement Offset A 500007E500007Illegal Pick data Link Pointer on Component data A 500008E500008Incomplete Component data A 500009E500009Illegal Next Pick data Link A 500010E500010Illegal Z-axis Position on Pick data A 500011E500011Illegal Component Pick Pos. on Pick data A 500012E500012No Need Nozzles in ATC A 500020E500020Please pickup component on nozzle(s)A 500999E500999No Productable data A501001E501001PWB Transport Error on Scheduling Quantity Complete A 501002E501002PWB Transport Error A 501003E501003Component cannot Remove from Nozzle A 501101E501101Nozzle Remove Failed A 501201E501201Algorithm Change Failed A 501202E501202ATC Move Failed A 501203E501203Component Remove Failed A 501301E501301Vision Component or Mark Picture Failed A 501302E501302Mark Recognize Failed A 502100E502100System Error [Vision] Parameter Value 1A 502101E502101System Error [Vision] Parameter Quantity A 502102E502102System Error [Vision] Terminate Character A 502103E502103System Error [Vision] Parameter Value 2A 502104E502104System Error [Vision] Undefinition Command A 502105E502105System Error [Vision] Illegal Recognized Condition A 502106E502106System Error [Vision] No Space of Recognized Condition A 502200E502200System Error [Vision] Bus Error A 502201E502201System Error [Vision] Address Error A 502202E502202System Error [Vision] Spurious Error A 502203E502203System Error [Vision] CPU Error 03A 502204E502204System Error [Vision] CPU Error 04A 502205E502205System Error [Vision] CPU Error 05A 502206E502206System Error [Vision] CPU Error 06A 502207E502207System Error [Vision] CPU Error 07A 502208E502208System Error [Vision] CPU Error 08A 502209E502209System Error [Vision] CPU Error 09A 502210E502210System Error [Vision] Timeout VBRANK A 502211E502211System Error [Vision] Timeout SIO A 502212E502212System Error [Vision] Incomplete GRAB A 502300E502300System Error [Vision] Others A 502301E502301System Error [Vision] Timeout Response A 503100E503100MTC Move Failed A 503101E503101MTC Move Failed|Component different from the demand wereA 503200E503200MTC Power is Off.|Please Power On B 503201E503201MTC Emergency Switch is Pressed.|Please Release the SwitB 503202E503202MTC is No Original A 503203E503203MTC is Off-Line Condition.|Please Change to On-Line B 503204E503204MTC is Door Open Condition.|Please Close Door B 503205E503205MTC is Cover Open Condition.|Please Close Cover B 503206E503206MTC is Error Condition A 503207E503207MTC is Change Component Condition.|Please Release the ChB 503208E503208Component exists on the MTC Shuttle.|Please Remove CompoA 503209I503209MTC component protection. Take off component.A 503210I503210Dispose of MTC component.C 510020W510020Please pickup component on nozzle(s)A 550001W550001No completion change plan.|Please use Feeder Bank.A 550002W550002No use Change Feeder Bank by Setup Data.A550003W550003No use feeder float by Setup Data.A 620001W620001Press ENTER after installing the feeder bank with IC recA 159010E159010Will return to Home Position. B 159011E159011AWC Control|| Will return to Home Position. B 159021E159021Will release from Servo lock state.B 159022E159022Will return to Servo lock state. B 159100E159100Hardware is Wrong ! ( SUB CPU - %d )|Please Restart !A 159110E159110Hardware is Wrong ! ( XY CPU - %d )|Please Restart !A 159120E159120Hardware is Wrong ! ( IO CPU - %d )|Please Restart !A 159130E159130Hardware is Wrong ! ( VISION - %d )|Please Restart !A 159140E159140Hardware is Wrong ! ( LASER #%d - %d )|Please Restart !A 159150E159150Hardware is Wrong ! ( MTC - %d )|Please Restart !A 159160E159160Hardware is Wrong ! ( COPLA - %d )|Please Restart !A 159199E159199Hardware is Wrong ! ( System Read - %d )|Please Restart A 159500E159500Can't communicate on internal ARCNET !|Please Restart afA 159600E159600Not Installed the Communication Board for HLC !A 159610E159610The communications to H.L.C. is unusual!|(Rretry over ofA 159619E159619The communications to H.L.C. is unusual!|(Others)A 159699E159699Insufficient memory (%s)A 159901E159901Internal Data (MSP) is Broken !|The data is returned to A 159902E159902Internal Data (CTL) is Broken !|The data is returned to A 159903E159903Internal Data (POS) is Broken !|The data is returned to A 159911W159911Machine Setup Data is Broken !|Please input the data agaA 159912W159912Operation Option Data is Broken !|Please input the data A 159913W159913Registered Teaching Data is Broken !|Please register theA 2800W2800Optimization Data is invalid.A 2801E2801Printer is not ready.A 2802W2802Production Data is invalid.A 2803W2803Management Information is invalid.A 2804W2804No placement data.A 2805W2805No component data.A 2806W2806No pick posiotion.A 2807W2807No vision data.A 2850E2850Database File can't be opened. A 2851W2851Output data range is invalid.A 2852E2852Printer is not ready.B 2853W2853There is no data file.A 2854E2854Data file is broken.A 2855W2855There is no data file.A 2856W2856 Print is interrupted. B 2900E2900Memory is not enugh in optimization. A 2901E2901Not found optimizain message. A 2902E2902Optimization is finished. A 2903E2903Terminate optimization. B 2904E2904OPTIM.INI is not exist. A 2905E2905Component data and pick data can't be saved to file. A 2906E2906Component data and pick data can't be recovered to file.A2907E2907Pick data is not complete. A 2911E2911Data is incorrect ,so stop allocation pick data of MTC. A 2912E2912Data is incorrect so stop calculation for placement numbA 2913E2913Data is incorrect ,so stop calculation for placement peaA 2914E2914Data is incorrect, so stop allocation for number of pickA 2915E2915Sorting for placment layer and nozzle number is abnormalA 2916E2916Data is incorrect ,so making for pairing placement data.A 2917E2917Memory is not enough at optimization feeder priority. A 2918E2918Data is incorrect , so stop processing for circuit repeaA 2919E2919Data is incorrect, so stop processing for repeat use samA 2931E2931Process for make feeder pair of parallel pick is abnormaA 2932E2932Allocation for feeder pair of parallel pick is abnormal A 2933E2933Sorting for parallel pick feeder allocate is abnormal enA 2934E2934Allocation for parallel pick feeder is abnormal end. A 2935E2935Can't execute feeder optimization. A 2936E2936Data renewal is abnormal end. A 2941E2941Sorting for placement layer and same nozzle is abnormal A 2942E2942Memory is not enough at making parallel pick table. A 2943E2943Making for parallel picking table. A 2944E2944Memory is not enough at making priority of feeder. A 2945E2945Memory is not enough at making for pairing of placement A 2946E2946Set %d nozzle . A 2947E2947Head can't move this position. %s - %d A 2948E2948Head can't move this position. Stick feeder %s - %d laneA 2949E2949Head can't move this position. Holder %s A 2950E2950MTC unit not used. Can't execute optimization. A 2951E2951Right head not used. Can't move MTC shattle. A 2952E2952LAIC(Right) head not used. Can't use Vision component. A 2953E2953Can't execute placement optimization, because feeder dat A 2954E2954All head not used. Can't execute placement optimization.A 2955E2955Can't execute placement optimization, because feeder dat A 2956W2956Terminate optimization, because feeder data not used. FrB 2957W2956Terminate optimization, because feeder data not used. ReB 2958W2956Terminate optimization, because feeder data not used. MTB 2960E2960Terminate optimization, because component is too big. CoA 2965E2965Terminate optimization, because LA head can't reach. ComA 7001E007001Origin retrieval has not yet been completed.A 7002E007002Axial operation is impossible since servo is in the freeA 7003E007003XY axis operation cannot be performed.A 7004E007004Nozzle parameter is not correct.A 200003E200003Front feeder rise sensor has been detected.A 200004E200004Rear feeder rise sensor has been detected.A 200005E200005Front feeder bank has descended.A 200006E200006Rear feeder bank has descended.A 200007E200007Axial operation is impossible since servo is in the freeA 200008E200008System error: Component type searching error has occurreA 200009E200009System error: Asynchronous phenomenon searching error haA200010E200010Cover open senser has been detected.A 200011E200011Origin retrieval has not yet been completed.A 200019E200019System error: XY axis software limit has been exceeded.A 200020E200020System error: X axis mechanical limit has been exceeded.A 200021E200021System error: Y axis mechanical limit has been exceeded.A 200022E200022System error: Parameter error when XY axis performs PTP A 200023E200023System error: Parameter error when XY axis performs PTP A 200024E200024System error: Parameter error when XY axis performs PTP A 200025E200025System error: Parameter error when XY axis performs PTP A 200026E200026System error: Error of parameter for moving direction inA 200027E200027System error: Multiple start of XY axis (during the axiaA 200028E200028System error: Multiple start of XY axis (during the timeA 200029E200029XY axis operation cannot be performed | since Z axis is A 200030E200030XY axis operation cannot be performed | since the currenA 200031E200031System error: Error from AC servo control is acknowledgeA 200032E200032System error: A value cannot be set in command parameterA 200033E200033System error: Value on counter is not consistent when JOA 200034E200034System error: CCL-48M status has not become READY." | TuA 200035E200035system error: CCL-48M status has not become READY" at thA 200036E200036System error: Predetermined length of time (30 sec.) | hA 200037E200037System error: I/F error has occurred between main CPU anA 200038E200038System error: I/F error has occurred between main CPU anA 200039E200039Number of steps has been exceeded at the time of X, YL oA 200040E200040Number of steps has been exceeded at the time of origin A 200041E200041Number of steps has been exceeded at the time of origin A 200042E200042First mark of XY axis calibration block has not been obtA 200043E200043System error: Offset data on the first mark of XY axis cA 200044E200044System error: JOG stop command has been issued when XY aA 200045E200045System error: Velocity employed when XY axis travels is A 200046E200046System error: Acceleration employed when XY axis travelsA 200047E200047System error: Period of time for waiting for dumping aftA 200048E200048XY axis operation cannot be performed | since Z axis hasA 200049E200049XY axis operation cannot be performed | since target heiA 200050E200050XY axis operation cannot be performed | since ascending A 200095E200095XY axis operation cannot be performed | since Z axis is A 200096E200096XY axis operation cannot be performed | since Z axis is A 201051E201051Z axis of left head: Origin retrieval has not yet beenA 201151E201151Z axis of center head: Origin retrieval has not yet beenA 201251E201251Z axis of right head: Origin retrieval has not yet beenA 202051E202051T axis of left head: Origin retrieval has not yet beenA 202151E202151T axis of center head: Origin retrieval has not yet beenA 202251E202251T axis of right head: Origin retrieval has not yet beenA 201052E201052System error: Z axis of left head: | Origin could not A 201152E201152System error: Z axis of center head: | Origin could not A 201252E201252System error: Z axis of right head: | Origin could not A 201053E201053System error: Z axis of left head: Software limit has A 201153E201153System error: Z axis of center head: Software limit has A。
(新高考适用)2023版高考物理二轮总复习专题2 能量与动量 第2讲 动量 动量守恒定律
第一部分 专题二 第2讲基础题——知识基础打牢1. (多选)(2022·广东汕头二模)科学家常在云室中加入铅板以降低运动粒子的速度.图示为物理学家安德森拍下的正电子在云室中运动的径迹,已知图示云室加垂直纸面方向的匀强磁场,由图可以判定( BC )A .匀强磁场方向向外B .正电子由上而下穿过铅板C .正电子在铅板上、下磁场中运动角速度相同D .正电子在铅板上、下磁场运动中动量大小相等【解析】 正电子在匀强磁场中,洛伦兹力提供向心力,则有qvB =m v 2r 解得r =mv qB,由于正电子经过铅板后速度会减小,可知正电子经过铅板后的轨迹半径减小,从图中可以看出正电子在铅板上方轨迹半径比下方轨迹半径大,故正电子由上而下穿过铅板,由左手定则判断匀强磁场方向向里,A 错误,B 正确;正电子经过铅板后速度会减小,则正电子经过铅板后动量减小,正电子在铅板上、下磁场运动中动量大小不相等,D 错误;正电子在磁场中做圆周运动的角速度为ω=v r =qBm可知正电子在铅板上、下磁场中运动角速度相同,C 正确.故选BC.2. (多选)(2022·重庆八中模拟)2022北京冬奥会期间,校园陆地冰壶也在积极的参与中.如图所示,某次投掷时,冰壶A 以速度v =3 m/s 与冰壶B 发生正碰,碰撞前后的速度均在同一直线上,若A 、B 的质量均为1 kg ,则下列说法正确的是( CD )A .碰撞后A 的速度可能为2 m/sB .碰撞后B 的速度可能为1 m/sC .碰撞后A 不可能反向运动D .碰撞后B 的速度可能为2.5 m/s【解析】 设A 、B 的质量为m ,若发生弹性碰撞,根据动量守恒得mv =mv A +mv B ,根据机械能守恒得12mv 2=12mv 2A +12mv 2B ,解得A 、B 的速度分别为v A =0,v B =v =3 m/s ,若发生完全非弹性碰撞,则mv =(m +m )v 共,解得A 、B 的共同速度为v 共=1.5 m/s ,所以碰撞后A 、B 球的速度范围分别为0~1.5 m/s,1.5 m/s ~3 m/s ,故选CD.3. (2022·广东汕头二模)汕头市属于台风频发地区,图示为风级(0~12)风速对照表.假设不同风级的风迎面垂直吹向某一广告牌,且吹到广告牌后速度立刻减小为零,则“12级”风对广告牌的最大作用力约为“4级”风对广告牌最小作用力的( A )C .27倍D .9倍【解析】 设空气的密度为ρ,广告牌的横截面积为S ,经过Δt 时间撞击在广告牌上的空气质量为Δm =ρΔV =ρSv Δt ,根据动量定理可得F Δt =Δmv ,解得F =ρSv 2,根据牛顿第三定律可知,风对广告牌作用力为F ′=F =ρSv 2∝v 2,则“12级”风对广告牌的最大作用力与“4级”风对广告牌最小作用力的比值为F 12′F 4′=36.925.52≈45,故选A.4. (2022·江苏连云港模拟)离子发动机是利用电场加速离子形成高速离子流而产生推力的航天发动机,这种发动机适用于航天器的姿态控制、位置保持等.某航天器质量M ,单个离子质量m ,带电量q ,加速电场的电压为U ,高速离子形成的等效电流强度为I ,根据以上信息计算该航天器发动机产生的推力为( B )A .I mU qB .I 2mUqC .I3mUqD .I5mUq【解析】 对离子,根据动能定理有qU =12mv 2,解得v =2qUm,根据电流的定义式则有I =Q Δt =Nq Δt ,对离子,根据动量定理有F ·Δt =Nmv ,解得F =Nmv Δt =mvIq=I 2Um q,根据牛顿第三定律,推进器获得的推力大小为F ′=I2Umq,故B 正确,A 、C 、D 错误.5. (多选)(2022·湖南长郡中学月考)如图所示,质量为m 的半圆轨道小车静止在光滑的水平地面上,其水平直径AB 长度为2R ,现将质量也为m 的小球从距A 点正上方h 0高处由静止释放,然后由A 点经过半圆轨道后从B 冲出,在空中能上升的最大高度为h 02(不计空气阻力).则下列说法错误的是( ACD )A .小球和小车组成的系统动量守恒B .小车向左运动的最大距离为RC .小球从B 点离开小车不会再落回轨道内D .小球从B 点离开小车后又会从B 点落回轨道,再次恰好到达A 点时速度为零不会从A 点冲出【解析】 小球与小车组成的系统在水平方向不受外力,所以只是系统水平方向动量守恒,故A 错误;系统水平方向动量守恒,以向右为正方向,在水平方向,由动量守恒定律得:mv -mv ′=0,m2R -x t =m xt解得x =R ,故B 正确;由于小球第二次在车中滚动时,对应位置的速度减小,因此小车给小球的弹力变小,摩擦力变小,克服摩擦力做的功小于12mgh 0,因此小球一定能从A 点冲出,故D 错误;小球与小车组成的系统水平方向上动量守恒,则知小球由B 点离开小车时水平方向动量为零,小球与小车水平方向速度均为零,小球离开小车后竖直上抛运动,最后又从B 点落回,故C 错误.故选ACD.6. (多选)(2022·湖南长沙二模)如图所示一平板车A 质量为2m ,静止于光滑水平面上,其右端与竖直固定挡板相距为L .小物块B 的质量为m ,以大小为v 0的初速度从平板车左端开始向右滑行,一段时间后车与挡板发生碰撞,已知车碰撞挡板时间极短,碰撞前后瞬间的速度大小不变但方向相反.A 、B 之间的动摩擦因数为μ,平板车A 表面足够长,物块B 总不能到平板车的右端,重力加速度大小为g .L 为何值,车与挡板能发生3次及以上的碰撞( CD )A .L =v20μgB .L =v2032μgC .L =v2065μgD .L =v2096μg【解析】 在车与挡板碰撞前,有mv 0=2mv A +mv B ,如果L 为某个值L 1,使A 与挡板能发生二次碰撞,从A 开始运动到与挡板第一次碰撞前瞬间,对A 由动能定理可得μmgL 1=12·2mv 2A ,设A 第二次与挡板碰撞前瞬间A 、B 的速度大小分别为v A ′、v B ′,从A 与挡板第一次碰撞后瞬间到第二次碰撞前瞬间,由动量守恒定律可得mv B -2mv A =2mv A ′+mv B ′且第二次碰撞前,A 、B 未达到共同速度,A 在这段时间内先向左后向右运动,加速度保持不变,根据匀变速直线运动的对称性可知v A ′=v A ,A 与挡板第二次碰撞后经一段时间后A 、B 同时停止运动,即mv B ′-2mv A ′=0,联立解得L 1=v2064μg ,车与挡板能发生3次及以上的碰撞的条件L <v 2064μg,故C 、D 可能,A 、B 不可能.7. (多选)(2022·江西贵溪二模)如图所示,在光滑水平面上放置一个质量为M 的滑块,滑块的一侧是一个14弧形凹槽OAB ,凹槽半径为R ,A 点切线水平,另有一个质量为m (m >M )的小球以速度v 0从A 点冲上凹槽,重力加速度大小为g ,不计摩擦.下列说法中正确的是( AB )A .当v 0=2gR 时,小球不可能到达B 点B .当v 0=2gR 时,小球在弧形凹槽上运动的过程中,滑块的动能一直增大C .如果小球的速度足够大,小球将从滑块的左侧离开滑块后落到水平面上D .当v 0=gR 时,小球返回A 点后可能做自由落体运动【解析】 当小球能够恰好到达B 点时,设小球和滑块达到共同速度v ,根据动量守恒定律有mv 0=(m +M )v ,根据机械能守恒定律有12mv 20=12(m +M )v 2+mgR ,联立以上两式解得v 0=2M +mMgR >2gR ,所以当v 0=2gR 时,小球不能到达B 点,A 正确;当v 0=2gR 时,小球未到达B 点,小球从进入凹槽至最高点的过程中,小球对滑块的作用力始终做正功,所以滑块的动能一直增大,B 正确;如果小球的初速度足够大,小球将从B 点冲出,由于B 点的切线方向竖直,小球离开滑块时,二者水平方向的速度相同,小球相对滑块做竖直上抛运动,最后将从B 再次进入凹槽,最后从滑块的右侧离开,C 错误;当v 0=gR 时,小球再次回到凹槽底部时的速度为v 1,凹槽的速度为v 2,根据系统机械能守恒和水平方向动量守恒可得12mv 20=12mv 21+12Mv 22,mv 0=mv 1+Mv 2,解得v 1=m -M m +M v 0,因为m >M ,则可知v 1=m -M m +M v 0>0,小球返回A 点后做平抛运动,而不是自由落体运动,D 错误.故选AB.应用题——强化学以致用8. (多选)(2022·重庆二诊)喷丸处理是一种表面强化工艺,即使用丸粒轰击工件表面,提升工件疲劳强度的冷加工工艺.用于提高零件机械强度以及耐磨性、抗疲劳性和耐腐蚀性等.某款喷丸发射器采用离心的方式发射喷丸,转轮直径为530 mm ,角速度为230 rad/s ,喷丸离开转轮时的速度与转轮上最大线速度相同.喷丸撞击到器件表面后发生反弹,碰撞后垂直器件方向的动能变为碰撞前动能的81%,沿器件表面方向的速度不变.一粒喷丸的质量为3.3×10-5kg ,若喷丸与器件的作用时间相同,且不计喷丸重力,则关于图甲、乙所示的两种喷射方式的说法正确的是( AD )A .喷丸发出过程喷丸发射器对一粒喷丸做的功约为0.06 JB .喷丸发出过程喷丸发射器对一粒喷丸做的功约为0.12 JC .图甲、乙所示一粒喷丸对器件表面的平均作用力之比为2∶1D .图甲、乙所示一粒喷丸对器件表面的平均作用力之比为2∶ 3【解析】 喷丸离开转轮时的速度与转轮上最大线速度相同,转轮上线速度的最大值为v =ωr =60.95 m/s ,则喷丸发出过程喷丸发射器对喷丸做的功约为W =12mv 2≈0.06 J,选项A 正确,B 错误;结合题述可知,喷丸碰撞后垂直器件表面的速度大小变为碰撞前的90%,设喷丸速度为v ,垂直喷射时有F 1=0.9mv --mvt,以60°角喷射时,有F 2=0.9×32mv -⎝ ⎛⎭⎪⎫-32mv t,解得F 1F 2=23,选项C 错误,D 正确.故选AD.9. (多选)(2022·河北衡水四调)质量为3m 足够长的木板静止在光滑的水平面上,木板上依次排放质量均为m 的木块1、2、3,木块与木板间的动摩擦因数均为μ.现同时给木块1、2、3水平向右的初速度v 0、2v 0、3v 0,已知重力加速度为g .则下列说法正确的是( BCD )A .木块1相对木板静止前,木板是静止不动的B .木块1的最小速度是12v 0C .木块2的最小速度是56v 0D .木块3从开始运动到相对木板静止时对地位移是4v 2μg【解析】 木块1在木板上向右减速运动,该过程木板向右做加速运动,当木块1与木板速度相等时相对木板静止,由此可知,木块1相对静止前木板向右做加速运动,故A 错误;木块与木板组成的系统所受合外力为零,当木块1与木板共速时木板的速度最小,设木块与木板间的摩擦力为f ,则木块1的加速度a 1=f m 做匀减速运动,而木板a =3f 3m =fm做匀加速运动,则v 1=v 0-a 1t =at ,v 1=12v 0,故B 正确;设木块2的最小速度为v 2,此时木块2与木板刚刚共速,木块2此时速度的变量为2v 0-v 2,则木块3此时速度为3v 0-(2v 0-v 2)=v 0+v 2,由动量守恒定律得:m (v 0+2v 0+3v 0)=5mv 2+m (v 0+v 2),解得v 2=56v 0,故C 正确;木块与木板组成的系统动量守恒,以向右为正方向,木块3相对木板静止过程,由动量守恒定律得m (v 0+2v 0+3v 0)=(3m +3m )v 3,解得v 3=v 0,对木块3,由动能定理得-μmgx =12mv 23-12m (3v 0)2,解得x =4v20μg,故D 正确.故选BCD.10. (2022·辽宁沈阳二模)如图(a),质量分别为m A 、m B 的A 、B 两物体用轻弹簧连接构成一个系统,外力F 作用在A 上,系统静止在光滑水平面上(B 靠墙面),此时弹簧形变量为x .撤去外力并开始计时,A 、B 两物体运动的a t 图像如图(b)所示,S 1表示0到t 1时间内A的a t 图线与坐标轴所围面积大小,S 2、S 3分别表示t 1到t 2时间内A 、B 的a t 图线与坐标轴所围面积大小.A 在t 1时刻的速度为v 0.下列说法正确的是( C )A .m A <mB B .S 1+S 2=S 3C .0到t 1时间内,墙对B 的冲量大小等于m A v 0D .B 运动后,弹簧的最大形变量等于x【解析】 a t 图线与坐标轴所围图形的面积大小等于物体速度的变化量,因t =0时刻A 的速度为零,t 1时刻A 的速度大小v 0=S 1,t 2时刻A 的速度大小v A =S 1-S 2,B 的速度大小v B=S3,由图(b)所示图像可知,t1时刻A的加速度为零,此时弹簧恢复原长,B开始离开墙壁,到t2时刻两者加速度均达到最大,弹簧伸长量达到最大,此时两者速度相同,即v A=v B,则S1-S2=S3,t1到t2时间内,A与B组成的系统动量守恒,取向右为正方向,由动量守恒定律得m A v0=(m A+m B)v A,联立解得m A∶m B=S3∶S2,由图知S3>S2,所以m A>m B,故A、B错误;撤去外力后A受到的合力等于弹簧的弹力,0到t1时间内,对A,由动量定理可知,合力即弹簧弹力对A的冲量大小I=m A v0,弹簧对A与对B的弹力大小相等、方向相反、作用时间相等,因此弹簧对B的冲量大小与对A的冲量大小相等、方向相反,即弹簧对B的冲量大小I弹簧=m A v0,对B,以向右为正方向,由动量定理得I墙壁-I弹簧=0,解得,墙对B的冲量大小I墙壁=m A v0,方向水平向右,故C正确;B运动后,当A、B速度相等时弹簧形变量(伸长量或压缩量)最大,此时A、B的速度不为零,A、B的动能不为零,由能量守恒定律可知,B运动后弹簧形变量最大时A、B的动能与弹簧的弹性势能之和与撤去外力时弹簧的弹性势能相等,则B 运动后弹簧形变量最大时弹簧弹性势能小于撤去外力时弹簧的弹性势能,即B运动后弹簧形变量最大时弹簧的形变量小于撤去外力时弹簧的形变量x,故D错误.11. (2022·山东押题练)2022年北京冬奥会自由式滑雪女子大跳台决赛中,中国选手谷爱凌以188.25分的成绩获得金牌.北京冬奥会报道中利用“Al+8K”技术,把全新的“时间切片”特技效果首次运用在8K直播中,更精准清晰地抓拍运动员比赛精彩瞬间,给观众带来全新的视觉体验.将谷爱凌视为质点,其轨迹视为一段抛物线图.图(a)是“时间切片”特技的图片,图(b)是谷爱凌从3 m高跳台斜向上冲出的运动示意图,图(c)是谷爱凌在空中运动时离跳台底部所在水平面的高度y随时间t变化的图线.已知t=1 s时,图线所对应的切线斜率为4(单位:m/s),重力加速度g取10 m/s2,忽略空气阻力.(1)求谷爱凌冲出跳台时竖直速度的大小;(2)求谷爱凌离跳台底部所在水平面的最大高度;(3)若谷爱凌从空中落到跳台底部所在水平地面时与地面的碰撞时间Δt=0.4 s,经缓冲没有脱离地面,水平速度不受影响,求碰撞过程中谷爱凌受到地面的平均作用力大小与自身重力大小的比值.【答案】(1)14 m/s (2)12.8 m (3)5【解析】(1)运动员竖直方向做匀减速直线运动,有v y=v y0-gty t 图线斜率表示竖直分速度,t =1 s 时v y =4 m/s解得谷爱凌冲出跳台时的竖直分速度v y 0=14 m/s 谷爱凌冲出跳台时竖直速度的大小为14 m/s.(2)最高点竖直分速度为0,竖直方向做匀减速直线运动,设离开跳台可以上升h 高度,则0-v 2y 0=-2gh代入数据解得h =9.8 m 跳台离地面高度y 0=3 m解得离跳台底部所在水平面的最大高度为y =h +y 0=12.8 m.(3)谷爱凌落到跳台底部所在水平面的竖直分速度大小v yt =2gy =16 m/s落在水平地面时,在竖直方向上,运动员受重力和水平地面的作用力,水平方向速度不变,以竖直向上为正方向,由动量定理得(F -mg )Δt =0-(-mv yt )代入数据解得Fmg=5.12. (2021·浙江6月选考)如图所示,水平地面上有一高H =0.4 m 的水平台面,台面上竖直放置倾角θ=37°的粗糙直轨道AB 、水平光滑直轨道BC 、四分之一圆周光滑细圆管道CD 和半圆形光滑轨道DEF ,它们平滑连接,其中管道CD 的半径r =0.1 m 、圆心在O 1点,轨道DEF 的半径R =0.2 m 、圆心在O 2点,O 1、D 、O 2和F 点均处在同一水平线上.小滑块从轨道AB 上距台面高为h 的P 点由静止下滑,与静止在轨道BC 上等质量的小球发生弹性碰撞,碰后小球经管道CD 、轨道DEF 从F 点竖直向下运动,与正下方固定在直杆上的三棱柱G 碰撞,碰后速度方向水平向右,大小与碰前相同,最终落在地面上Q 点.已知小滑块与轨道AB 间的动摩擦因数μ=112,sin 37°=0.6,cos 37°=0.8,g 取10 m/s 2.(1)若小滑块的初始高度h =0.9 m ,求小滑块到达B 点时速度v 0的大小; (2)若小球能完成整个运动过程,求h 的最小值h min ;(3)若小球恰好能过最高点E ,且三棱柱G 的位置上下可调,求落地点Q 与F 点的水平距离x 的最大值x max .【答案】 (1)4 m/s (2)0.45 m (3)0.8 m【解析】 (1)小滑块在AB 轨道上运动,根据动能定理得mgh -μmg cos θ·hsin θ=12mv 20,解得v 0=4 m/s.(2)小滑块与小球碰撞后动量守恒,机械能守恒,因此有mv 0min =mv 块+mv 球min ,12mv 20min =12mv 2块+12mv 2球min , 解得v 块=0,v 球min =v 0min ,小球沿CDEF 轨道运动,在最高点可得mg =m v 2E minR,从C 点到E 点由机械能守恒可得 12mv 2E min +mg (R +r )=12mv 2球min , 由(1)问可知,小滑块提供给小球的初速度v 0min =43gh min ,解得h min =0.45 m.(3)设F 点到G 点的距离为y ,小球从E 点到G 点的运动,由动能定理得mg (R +y )=12mv2G -12mv 2E min , 由平抛运动可得x =v G t ,H +r -y =12gt 2,联立可得水平距离为x =20.5-y0.3+y ,由数学知识可得当0.5-y =0.3+y ,x 取最大值,最大值为x max =0.8 m.。
广东省深圳市海湾中学2022-2023学年七年级上学期期中考试数学试题 (解析版)
初一年级数学学科中期教学反馈一、选择题(每题3分,共30分)1. 2022的相反数是( )A. 2022B. 2022−C. 12022D. 12022− 【答案】B【解析】【分析】根据相反数的定义直接求解.【详解】解:实数2022的相反数是2022−,故选:B .【点睛】本题主要考查相反数的定义,解题的关键是熟练掌握相反数的定义.2. 2020年宝安区在教育方面的支出约为9870000000元人民币,将9870000000用科学记数法可表示为( )A. 798710×B. 898.710×C. 99.8710×D. 100.98710× 【答案】C【解析】【分析】利用科学记数法的表示形式将9870000000表示出来即可.【详解】将9870000000用科学记数法表示为:99.8710×.故答案为:C .【点睛】本题考查科学记数法的表示方法.科学记数法的表示形式为10n a ×的形式,其中110a ≤<,n 为整数.正确的确定a 和n 的值是关键.3. 下列哪个图形不可能是正方体的表面展开图( )A. B. C. D.【答案】A【解析】【分析】正方体的展开图有1+4+1“”型,2+3+1“”型,3+3“”型,“2+2+2”型,其中“1”可以左右移动,注意“一”、“7”、“田”“凹”字形的都不是正方形的展开图.【详解】解:根据正方体展开图的特征,A .不是正方体的展开图,故A 符合题意;B .是正方体的展开图,故B 不符合题意;C .是正方体的展开图,故C 不符合题意;D .是正方体的展开图,故D 不符合题意;故选:A .【点睛】本题主要考查正方体的平面展开图,掌握正方体的几种不同展开图形状是解决本题的关键. 4. 一次社会调查中,某小组了解到某种品牌的薯片包装上注明净含量为605g ±,则下列同类产品中净含量不符合标准的是( )A 56gB. 60gC. 64gD. 68g 【答案】D【解析】【分析】根据净含量为60±5g 可得该包装薯片的净含量,再逐项判断即可.【详解】解:∵薯片包装上注明净含量为60±5g ,∴薯片的净含量范围为:55≤净含量≤65,故D 不符合标准,故选:D .【点睛】本题主要考查了正负数的定义,计算出净含量的范围是解答此题的关键.5. 单项式235y a b 与单项式32x a b 是同类项,则x y +的值是( ) A. 3B. 5C. 7D. 8 【答案】B【解析】【分析】先根据同类项的定义求出x 和y 的值,再把求得的x 和y 的值代入所给代数式计算即可. 【详解】解:∵单项式235y a b 与单项式32x a b 是同类项, ∴x =2,y =3,∴x y +=2+3=5,故选B .【点睛】本题考查了利用同类项的定义求字母的值,熟练掌握同类项的定义是解答本题的关键.所含字母相同,并且相同字母的指数也相同的项,叫做同类项.6. 将一副直角三角尺按如图所示摆放,则图中∠ABC 的度数是 ( ) .A. 120°B. 135°C. 145°D. 150°【答案】B【解析】 【详解】 解:根据三角尺的角度可知:∠ABD =45°,∠DBC =90°,则∠ABC =45°+90°=135°,故选:B .7. 能解释:“用两个钉子就可以把木条固定在墙上”,这实际问题的数学知识是( )A. 两点之间线段最短B. 两点确定一条直线C. 垂线段最短D. 在同一平面内,过一点有且只有一条直线与已知直线垂直【答案】B【解析】【分析】根据题意,两个钉子可以把一个木条钉在墙上,也就是两个钉子【详解】用两个钉子就可以把木条固定在墙上,这样做的依据是两点确定一条直线.故选 B【点睛】此题主要考查了直线的性质:两点确定一条直线,灵活应用概念于实际生活是解题的关键. 8. 下列各式计算正确的是( )A. 347a b ab +=B. 451x x −=−C. 2(2)4−=−D. (3)3x x −−=−+ 【答案】D【解析】【分析】利用同类项定义与合并同类项法则可判断A ,B ,利用乘方运算法则可判断C ,利用去括号法则可判断D 即可.【详解】A .∵34a b ,不是同类项,不能合并,故347a b ab +=不正确;B .∵按同类项合并法则只把系数相加减,字母与字母指数不变得45x x x −=−,故451x x −=−不正确;C .∵2(2)4−=,故2(2)4−=−不正确;D .∵根据去括号法则(3)3x x −−=−+正确. 故选择:D .【点睛】本题考查同类项的定义与合并同类项法则,乘方的运算法则,去括号法则,掌握同类项的定义与合并同类项法则,乘方的运算法则,去括号法则是解题关键.9. 下列说法正确的是( )A. 最小的整数是0B. 角的大小与角的两边的长短无关C. 各边都相等的多边形叫正多边形D. 若线段AB BC =,则点B 是线段AC 的中点【答案】B【解析】【分析】根据整数的定义,角的定义,正多边形的定义,线段中点的定义进行判断即可.【详解】解:A .整数分为正整数、负整数和0,而0要大于任何一个负整数,没有最小的整数,故A 错误;B .角的大小与角的两边的长短无关,故B 正确;C .各边都相等,各个内角也相等的多边形叫正多边形,故C 错误;D .若线段AB BC =,且点B 在线段AC 上时,则点B 是线段AC 的中点,故D 错误.故选:B .【点睛】本题主要考查了相关的数学概念,解题的关键是熟练掌握整数的定义,角的定义,正多边形的定义,线段中点的定义.10. 有理数a ,b 在数轴上对应点的位置如图所示,下列选项正确的是( )A. 0a b +>B. 0ab >C. a b <−D. 0b a −>【答案】C【解析】【分析】根据有理数a,b在数轴上的位置逐项进行判断即可.【详解】解:由有理数a,b在数轴上位置可知,b<-1<0<a<1,且|a|<|b|,因此a+b<0,故A不符合题意;ab<0,故B不符合题意;a+b<0,即a<-b,故C符合题意;b<a,即b-a<0,故D不符合题意;故选:C.【点睛】本题考查数轴表示数的意义,有理数的加、减、乘法运算,掌握计算法则是正确判断的前提.二、填空题(每题3分,共15分)11. 在10,1,,102−−四个数中,最小的数是___________.【答案】10−【解析】【分析】比较有理数的大小法则,正数大于0,负数小于0,正数大于一切负数,两个负数,其绝对值大的数反而小,比较即可.【详解】1 10012−<−<<,∴最小数是10−,故答案为:10−.【点睛】考查了有理数的大小比较法则,注意两个负数的比较大小,绝对值大的数反而小.12. 上午6:30时,时针与分针的夹角为__________度.【答案】15【解析】【分析】6:30时,分针指向数字6,根据时针每分钟转0.5°得到时针从数字6开始30分转了15°,则6:30时,时针与分针的夹角为15°.【详解】解:时针从数字6开,30分转了30×0.5°=15°,而6:30时,分针指向数字6,所以6:30时,时针与分针的夹角=15°.故答案为15°.【点睛】本题考查了钟面角:钟面被分成12大格,每大格30°;分针每分钟转6°,时针每分钟转0.5°.的13. 若a 、b 为实数.2|2|(1)0a b −++=,则2a b +=______. 【答案】3【解析】【分析】根据绝对值和二次方的非负性求出a 、b 的值,再代入求值即可.【详解】解:∵2|2|(1)0a b −++=,∴20a −=,10b +=,解得:2a =,1b =-,∴22213a b =−+=.故答案为:3.【点睛】本题主要考查了绝对值的非负性,二次方的非负性,代数式求值,解题的关键是根据绝对值和二次方的非负性求出a 、b 的值.14. 观察如图所示的程序,若输入3,则输出的结果为______.【答案】5【解析】【分析】根据流程图所示顺序,逐框分析代入求值即可.【详解】解:当3x =时,代入输出结果为:2315×−=.故答案为:5.【点睛】本题主要考查了学生代数式求值问题及读图理解的能力,解题的关键是根据输入的竖直选择合适的式子,代入求值即可.15. 将一张长方形的纸按照如图所示折叠后,点C 、D 两点分别落在点C ′、D ¢处,若EA 平分D EF ′∠,则DEF ∠=_________.【答案】120°【解析】【分析】由折叠的性质,则DEF D EF ′∠=∠,由角平分线的定义,得到12AEF D EF ′∠=∠,然后由邻补角的定义,即可求出答案.【详解】解:根据题意,由折叠的性质,则 DEF D EF ′∠=∠,∵EA 平分D EF ′∠, ∴1122AEF D EF DEF ′∠=∠=∠, ∵180AEF DEF ∠+∠=°, ∴11802DEF DEF ∠+∠=°, ∴120DEF ∠=°;故答案:120°.【点睛】本题考查了折叠的性质,角平分线的定义,邻补角的定义,解题的关键是掌握所学的知识,正确的求出DEF ∠的度数.三、解答题16 计算(1)()2738−+−−+(2)32[5(2)]×+−(3)()11124346 +−×−(4)20222111()|6|223−+−×−÷ 【答案】(1)4−(2)6−(3)10−为.(4)34− 【解析】【分析】(1)根据有理数加减运算法则进行计算即可;(2)根据有理数混合运算法则进行计算即可;(3)根据乘法分配律进行计算即可;(4)根据有理数混合运算法则进行计算即可.【小问1详解】解:()2738−+−−+2738=−−−+4=−;【小问2详解】解:32[5(2)]×+−()258=×+−()258=×−()23=×−6=−;【小问3详解】 解:()11124346 +−×− ()()()111242424346=×−+×−−×− ()()864=−+−−−144=−+10=−;【小问4详解】 解:20222111()|6|223−+−×−÷ 11646=−+×÷114=−+ 34=−. 【点睛】本题主要考查了有理数的混合运算,解题的关键是熟练掌握有理数的混合运算法则. 17. 如图,是由6个大小相同的小立方体块搭建的几何体,其中每个小正方体的棱长为1厘米. (1)直接写出这个几何体的表面积(包括底部): ;(2)请按要求在方格内分别画出从这个几何体的三个不同方向看到的形状图.【答案】(1)26平方厘米;(2)见解析图【解析】【分析】(1)根据几何体的形状得出其表面积即可;(2)直接利用三视图的画法得出符合题意的答案.【详解】(1)这个几何体的表面积为:2×(5+4+4)×(1×1)=26(平方厘米)故答案为:26平方厘米;(2)如图所示:【点睛】此题主要考查了几何体的表面积及三视图,正确掌握不同视图的观察角度是解题关键. 18. (1)化简:()()222214x xy x xy −+−−+(2)先化简,再求值:()()222234+−−−x y xy x y xy x y ,其中1x =,1y =−.【答案】(1)255x y xy −+;(2)255x y xy −+;0【解析】【分析】(1)先去括号,然后再合并同类项即可;(2)先根据整式加减运算法则进行计算,然后再代入数据求值即可.【详解】解:(1)()()222214x xy x xy −+−−+ 222442x xy x xy −+−−−2283x xy =−+−;(2)()()222234+−−−x y xy x y xy x y 22222334x y xy x y xy x y +−+−255x y xy =−+,把1x =,1y =−代入得:原式()()2511511=−××−+××− 55=−0=.【点睛】本题主要考查了整式的加减运算及其求值,解题的关键是熟练掌握整式混合运算法则. 19. 某人用400元购买了8套儿童服装,准备以一定价格出售,如果以每套儿童服装60元的价格为标准,超出的记作正数,不足的记作负数,记录如下(单位:元):+2, -3, +2, +1, -2, -1, 0, -2(1)这8套儿童服装一共卖了多少钱?(2)总共盈利(或亏损)了多少钱?【答案】(1)477元;(2)77元.【解析】【分析】(1)计算+2+(-3)+2+1+(-2)+(-1)+0+(-2),然后加上60×8,即可求解;(2)用(1)中的总收入减去总成本400元即可求解.【详解】解:(1)+2+(-3)+2+1+(-2)+(-1)+0+(-2)=-3,一共卖了60×8-3=477(元);(2)477-400=77(元).答:这8套儿童服装一共卖了477元;总共盈利了77元.【点睛】此题考查了有理数的加减法的实际应用及正数和负数的应用,解题关键是理解“正”和“负”的相对性,列出式子.20. 线段AB =4cm ,延长线段AB 到C ,使BC = 1cm ,再反向延长AB 到D ,使AD ="3" cm ,E 是AD 中点,F 是CD 的中点,求EF 的长度.【答案】2.5cm【解析】【分析】根据条件可以求出线段DC 的长,因为E 是AD 中点,F 是CD 的中点,所以可求出线段DE ,DF 的长,而EF =DF -DE ,所以EF =2.5cm .【详解】解:由AB =4cm ,BC ="1cm" ,AD =3cm得DC =4+1+3=8cm因为E 是AD 的中点,所以DE =12AD =1.5cm ,因为F 是CD 的中点,所以DF =12CD =4cm ,所以EF =DF -DE =2.5cm【点睛】本题考查了线段的中点和线段的和差倍分计算,明确中点是哪条线段的中点是解题的关键. 21. 已知OC 为一条射线,OM 平分AOC ∠,ON 平分BOC ∠.(1)如图1,当60AOB ∠=°,OC 为AOB ∠内部任意一条射线时,MON ∠=; (2)如图2,当60AOB ∠=°,OC 旋转到AOB ∠的外部时,MON ∠=; (3)如图3,当AOB α∠=,OC 旋转到AOB ∠(120BOC ∠°<)的外部时,求MON ∠,请借助图3填空.解:∵OM 平分AOC ∠,ON 平分BOC ∠( ) ∴12COM AOC ∠=∠,12CON BOC ∠=∠( ) ∴MON COM ∠=∠− 12AOC =∠−()12AOC BOC ∠=∠-=12α=. 【答案】(1)30°(2)30°(3)已知;角平分线的定义;CON ∠;12BOC ∠;AOB ∠ 【解析】 【分析】(1)根据角平分线定义可得12MOC AOC ∠=∠,12NOC BOC ∠=∠,再利用角的和差可得MON ∠的度数;(2)根据(1)思路可得答案;(3)根据角平分线的定义与角的和差可得答案.【小问1详解】解:∵OM 平分AOC ∠,ON 平分BOC ∠, ∴12MOC AOC ∠=∠,12NOC BOC ∠=∠, ∴11130222MON MOC NOC AOC BOC AOB ∠=∠+∠=∠+∠=∠=°. 故答案为:30°.【小问2详解】 解:∵OM 平分AOC ∠,ON 平分BOC ∠,∴12MOC AOC ∠=∠,12NOC BOC ∠=∠, ∴11130222MON MOC NOC AOC BOC AOB ∠=∠+∠=∠−∠=∠=°. 故答案为:30°.【小问3详解】 解:∵OM 平分AOC ∠,ON 平分BOC ∠(已知)的∴12COM AOC ∠=∠,12CON BOC ∠=∠(角平分线的定义) ∴MON COM CON ∠=∠−∠ 1122AOC BOC =∠−∠ ()12AOC BOC =∠−∠ 12AOB =∠ 12α=. 故答案为:已知;角平分线的定义;CON ∠;12BOC ∠;AOB ∠. 【点睛】本题主要考查角的计算和角平分线的定义,熟练掌握角平分线的定义与角的和差是解题关键. 22. 【背景知识】数轴上A 点、B 点表示的数为a 、b ,则A ,B 两点之间的距离AB =|a ﹣b |,若a >b ,则可简化为AB =a ﹣b :线段AB 的中点M 表示的数为2a b +. 【问题情境】已知数轴上有A 、B 两点,分别表示的数为﹣10,8,点P ,Q 分别从A ,B 同时出发,点P 以每秒5个单位长度的速度沿数轴向右匀速运动,点Q 以每秒3个单位长度的速度沿数轴向左匀速运动,设运动时间为t 秒(t >0).【综合运用】(1)A 、B 两点的距离为 ,线段AB 的中点C 所表示的数 ;(2)点P 所在的位置的点表示的数为 ,点Q 所在位置的点表示的数为 (用含t 的代数式表示);(3)P 、Q 两点经过多少秒会相遇?【答案】(1)18,-1;(2)-10+5t ,8-3t ;(3)P 、Q 两点经过94秒会相遇. 【解析】【分析】(1)根据两点间的距离公式和中点坐标公式即可求解;(2)根据左减右加即可求解;(3)根据路程和=速度和×时间列方程求解可得.【详解】解:(1)A 、B 两点的距离为8-(-10)=18,线段AB 的中点C 所表示的数[8+(-10)]÷2=-1,故答案为:18,-1;(2)点P所在的位置的点表示的数为-10+5t,点Q所在位置的点表示的数为8-3t,故答案为:-10+5t,8-3t;(3)依题意有:5t+3t=18,解得t=9 4.故P、Q两点经过94秒会相遇.【点睛】本题主要考查了两点间的距离及一元一次方程的实际应用能力,根据路程和=速度和×时间,列出方程是解题的关键.。
2024-2025学年广东省佛山市君兰中学九年级上学期入学摸底考试物理试题
2024-2025学年广东省佛山市君兰中学九年级上学期入学摸底考试物理试题1.华为手机Mate60Pro,如图所示,这台手机的重力约为()A.0.22N B.2.2N C.22N D.220N2.如图所示,矿泉水瓶盖上的条纹设计是为了()A.增大压力B.增大摩擦力C.减小压力D.减小摩擦力3.如图所示,单摆在从B运动到C,上升过程中摆球的()A.动能不变B.重力势能不变C.动能变小D.重力势能变小4.如图所示,一个同学用水平力F推停在水平地面上的汽车,但没有推动.推车时水平力F与地面对车的摩擦力f的大小关系是 ( )A.F一定小于f B.F可能小于fC.F一定等于f D.F可能大于f5.如图所示,体重相近的小明和小红站在雪地上,小明陷下去了,小红却没有陷下去的主要原因是()A.小明对雪地压力大B.小明对雪地受力面积大C.小红对雪地压力大D.小红对雪地受力面积大6.图甲为我国古代的滴水计时工具—漏刻,图乙为它的模拟示意图。
漏水壶通过底部的出水口向受水壶中滴水,受水壶中的箭尺始终处于漂浮状态。
当受水壶中液面升高时,下列说法正确的是()A.箭尺受到的浮力变大B.箭尺排开水的体积变大C.箭尺排开水的重力不变D.水对受水壶底压强不变7.如图所示,用剪刀将一张纸片缓慢地一刀剪断的过程中,阻力臂l阻和动力F动的变化情况是()A.l阻不变,F动变大B.l阻不变,F动不变C.l阻变大,F动变大D.l阻变大,F动不变8.用力踢足球,足球由静止变为运动,说明力可以改变物体的______;在踢球的瞬间,球会有一些凹陷,这说明力还可以改变物体的______。
优秀运动员的脚踢在球的恰当的位置,球会划出一道弧线飞转绕过“人墙”而进入球门,就是所谓的“香蕉球”,从力的三要素分析“恰当的位置”,是指力的______。
9.家用小轿车多呈流线型,外形如图所示。
在快速行驶中,小汽车上方的流速_____下方气流流速,从而使汽车上方压强_____下方压强(选填“大于”或“小于”),产生升力,同时也使汽车对地面压力变_____,从而使摩擦力变小。
乐彩750故障

针对所有国产4色机一:如何初始化设置菜单→使用者设置菜单→初始设定值二:初始化后英文变中文右4(按3下)→右2→右1→左4(一直按到出现中文)→确定三:更改PASS值设置菜单→打印模式菜单→每行喷印次数→一般改为“四次”或“六次”→确定四:更改托架速度设置菜单→打印模式菜单→托架速度→一般改为“7”→确定五:页边留白设置菜单→纸张选项菜单→页边留白→“正常”改为“扩展”→确定六:计量单位设置菜单→使用者设置菜单→计量单位选择→“英制”改为“公制”→确定七:保存设置菜单→使用者设置菜单→保存使用者设置→保存到“1”里→确定写真机的常见问题及解决办法1.错位:A.故障现象:左右错位大于0.5公分,隔段错位。
电机阻力值过大。
可检查皮带,皮带轮,铜套,滑面贴,光栅,确保都没有问题仍不能解决,更换电机。
B.故障现象:左右错位小于0.5公分,连续错位。
铜套阻力过大,可清洗铜套,擦拭光杆或降低托架速度。
仍不能解决,更换铜套C.故障现象:出图斜,成平行四边形。
擦光栅,译码器。
仍不能解决,检查光栅如果受损,更换光栅。
D.故障现象:字体周围有杂色虚边。
校准喷头。
2.出图速度慢:A.故障现象:打图左右有停顿。
操作系统是否WIN98,外部并行打印口是否是ECP3.喷头不出墨:A.故障现象:单个喷头不出墨。
交叉换位打清洗后,判断触点带是否有问题。
如无,可以判断是烧或者堵,堵的话可用热的纯净水冲泡。
如固定一个颜色经常堵头,可与墨水供应商联系,调换墨水。
B.故障现象:所有喷头均不出喷墨,其中有一个喷头有问题,影响其他。
逐个打清洗挑出来即可,或者墨车板有问题。
4.打印出的图像歪斜错位或者走弧线?A.光栅太脏:用棉签蘸酒精擦拭光栅并保持环境卫生或更换光栅B.光栅感应器太脏:拆除光栅感应器用酒精擦拭或更换光栅感应器C.铜环磨损厉害或太脏:更换铜环或涂抹无尘机油保持润滑D.小车运行速度太快:将小车速度调到“7”或“8”为宜5.打印时小车两边停顿运行不流畅导致打印速度变慢?A.电脑未设置好ECP打印端:电脑重启,在电脑进行硬件自检时按DEL键进入COMS设置,进入INTEGRATED PERIPHERALS功能选项,将其中的Parallel Port Mode设置为ECP(注意:一定要是标准ECP,而不是EPP,SPP 或ECP/EPP),最后保存并退出BIOS,随后,电脑会重新启动,windows系统自动检测到ECP打印口并为其安装驱动程序,这时,您就可以使用ECP打印口所提供的告诉传输性能了。
2025届福建省厦门市思明区莲花中学初三下学期”领军考试“物理试题含解析
2025届福建省厦门市思明区莲花中学初三下学期”领军考试“物理试题考生请注意:1.答题前请将考场、试室号、座位号、考生号、姓名写在试卷密封线内,不得在试卷上作任何标记。
2.第一部分选择题每小题选出答案后,需将答案写在试卷指定的括号内,第二部分非选择题答案写在试卷题目指定的位置上。
3.考生必须保证答题卡的整洁。
考试结束后,请将本试卷和答题卡一并交回。
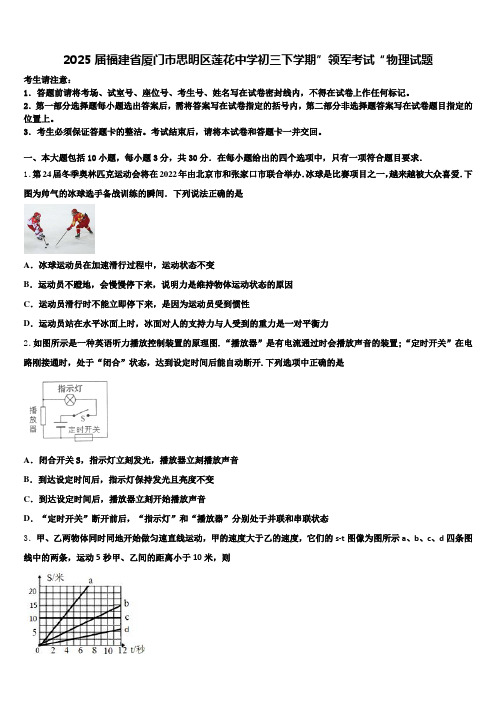
一、本大题包括10小题,每小题3分,共30分.在每小题给出的四个选项中,只有一项符合题目要求.1.第24届冬季奥林匹克运动会将在2022年由北京市和张家口市联合举办.冰球是比赛项目之一,越来越被大众喜爱.下图为帅气的冰球选手备战训练的瞬间.下列说法正确的是A.冰球运动员在加速滑行过程中,运动状态不变B.运动员不蹬地,会慢慢停下来,说明力是维持物体运动状态的原因C.运动员滑行时不能立即停下来,是因为运动员受到惯性D.运动员站在水平冰面上时,冰面对人的支持力与人受到的重力是一对平衡力2.如图所示是一种英语听力播放控制装置的原理图.“播放器”是有电流通过时会播放声音的装置;“定时开关”在电路刚接通时,处于“闭合”状态,达到设定时间后能自动断开.下列选项中正确的是A.闭合开关S,指示灯立刻发光,播放器立刻播放声音B.到达设定时间后,指示灯保持发光且亮度不变C.到达设定时间后,播放器立刻开始播放声音D.“定时开关”断开前后,“指示灯”和“播放器”分别处于并联和串联状态3.甲、乙两物体同时同地开始做匀速直线运动,甲的速度大于乙的速度,它们的s-t图像为图所示a、b、c、d四条图线中的两条,运动5秒甲、乙间的距离小于10米,则A.甲的s-t图一定为图线aB.乙的s-t图一定为图线bC.甲的s-t图可能为图线cD.乙的s-t图可能为图线d4.2018年,平昌冬奥会闭幕式的“北京8分钟”惊艳了全世界,在美轮美奂的光影中,冰上少年与智能机器人随音乐共舞,20多名机器人动作整齐划一,精准优美,和炫舞少年相得益彰,关于正在表演的机器人和冰上少年,下列说法正确的是A.机器人在弯道滑行时,运动状态不发生改变B.机器人在冰面上运动时,不受力的作用C.相对于看台上的观众,滑行中的机器人是运动的D.相对于自己的溜冰鞋,滑行中的少年是运动的5.下列现象可用光的反射原理解释的是A.立竿见影B.倒映在小河中的桥C.水面“折”枝D.日全食6.关于温度、热量和内能的说法中正确的是A.物体吸收热量,温度一定升高B.0℃的冰的内能为零C.物体内能增大,一定吸收了热量D.物体的温度升高,内能增大7.如图所示电路,闭合开关后,将滑动变阻器滑片P由a端向b端滑动的过程中,图中电压表和电流表的示数变化正确的是A.电压表示数不变,电流表示数变大B.电压表示数变小,电流表示数变大C.电压表示数不变,电流表示数变小D.电压表示数变大,电流表示数变小8.如下图有四组不同的电阻,已知R1<R2,那么电阻最小的是A.B.C.D.9.在如图所示的电路连接中,下列说法正确的是( )A.灯泡L1和L2并联,电流表测的是L1支路的电流B.灯泡L1和L2并联,电压表测量的是电源电压C.灯泡L1和L2串联,电压表测的是L2的电压D.灯泡L1和L2串联,电压表测的是L1的电压图像,小明对图像信息做出的判断,正确的是()10.右图是电阻甲和乙的I UA.当甲两端电压为0.5V时,通过它的电流为0.3AB.当乙两端电压为2.5V时,其电阻值为10ΩC.将甲和乙串联,若电流为0.3A,则它们两端的电压为2VD.将甲和乙并联,若电压为1V,则它们的干路电流为0.4A二、填空题(本大题包括7小题,每小题2分,共14分)11.舰艇组成的编队通常采用“一字形”编队形式。
潍坊市临朐县九山镇初级中学2024届中考物理模试卷含解析
潍坊市临朐县九山镇初级中学2024届中考物理模试卷注意事项:1.答卷前,考生务必将自己的姓名、准考证号填写在答题卡上。
2.回答选择题时,选出每小题答案后,用铅笔把答题卡上对应题目的答案标号涂黑,如需改动,用橡皮擦干净后,再选涂其它答案标号。
回答非选择题时,将答案写在答题卡上,写在本试卷上无效。
3.考试结束后,将本试卷和答题卡一并交回。
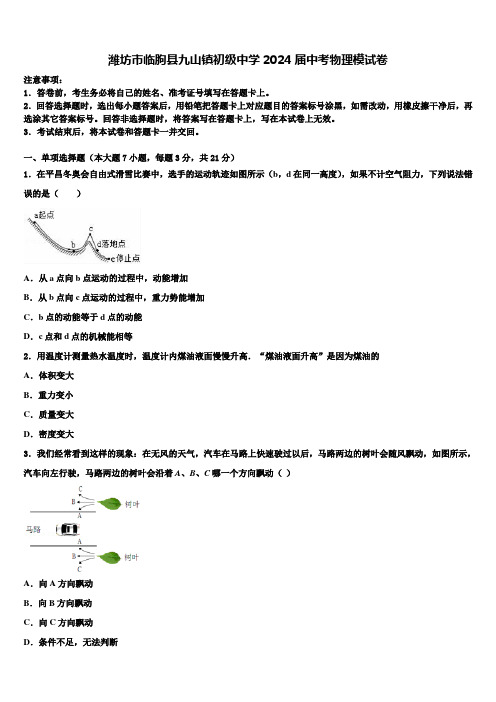
一、单项选择题(本大题7小题,每题3分,共21分)1.在平昌冬奥会自由式滑雪比赛中,选手的运动轨迹如图所示(b,d在同一高度),如果不计空气阻力,下列说法错误的是()A.从a点向b点运动的过程中,动能增加B.从b点向c点运动的过程中,重力势能增加C.b点的动能等于d点的动能D.c点和d点的机械能相等2.用温度计测量热水温度时,温度计内煤油液面慢慢升高.“煤油液面升高”是因为煤油的A.体积变大B.重力变小C.质量变大D.密度变大3.我们经常看到这样的现象:在无风的天气,汽车在马路上快速驶过以后,马路两边的树叶会随风飘动,如图所示,汽车向左行驶,马路两边的树叶会沿着A、B、C哪一个方向飘动()A.向A方向飘动B.向B方向飘动C.向C方向飘动D.条件不足,无法判断4.生活中用“低声细语”来形容声音,这里的“低”描述的是声音的A.音调B.响度C.音色D.频率5.关于温度、内能和热量,下列说法正确的是()A.物体内能减少时,一定对外做功B.物体内能增加时,温度不一定升高C.汽油机的做功冲程把机械能转化为内能D.温度高的物体含有的热量比温度低的物体多6.测量仪器是物理实验重要器材,下面关于测量仪器的工作原理说法不正确的是A.伽利略温度计的原理是利用气体的热胀冷缩的性质工作的B.液体温度计是利用感温液的热胀冷缩性质使感温液的体积发生变化来显示温度的C.天平的工作原理是杠杆的平衡条件D.微小气压计的工作原理是利用连通器工作的7.工业上通常是对空气进行加压降温,使空气变成液态,然后再加热液态空气来制取氧气的.由于不同气体的沸点不同,所以在加热时,空气中的各种气体就会被分离出来.以上过程涉及到的物态变化分别是A.液化汽化B.液化熔化C.升华熔化D.凝华液化二、填空题(本大题7小题,共21分)8.如图所示,斜面长S=10m,高h=4m.用沿斜面方向的推力F,将一个重为150N的物体由斜面底端A匀速推到顶端B.运动过程中物体克服摩擦力做了200J的功.求:(1)运动过程中克服物体的重力做的功W=_____J;(2)斜面的机械效率η=_____;(3)推力F的大小F=_____N.9.星期天,雨后天睛的午后,滇池上空出现了美丽的彩虹,这是光的_____现象。
9槽12极极弧系数 -回复
9槽12极极弧系数-回复什么是9槽12极极弧系数?一般人可能对这个概念并不熟悉,因此在回答这个问题之前,我们需要先了解一些基础知识。
其中包括电机的基本结构、极弧和极弧系数的概念。
电机作为将电能转化为机械能的装置,在现代生活中扮演着非常重要的角色。
电机的基本结构包括定子和转子两部分。
定子是不动的部分,通常由若干个磁极组成,而转子则是旋转的部分,通过与定子的磁场相互作用来产生力矩。
在定子中,磁极是电机的重要组成部分之一。
磁极会在电机运行时产生一定的磁场,而这个磁场形成的轨迹被称为极弧。
极弧通常是一个闭合的曲线,它对电机的运行性能具有重要影响。
极弧系数是描述极弧形状的一个重要参数。
它定义了极弧在整个电机结构中的占比。
9槽12极极弧系数则是指在一个拥有9个定子槽和12个磁极的电机中,极弧的系数。
那么,为什么极弧系数如此重要呢?极弧系数影响着电机的工作效率、启动特性和运行稳定性等方面。
一个合理的极弧系数可以提高电机的功率因数,使其能够更有效地将电能转化为机械能。
此外,极弧系数还与电机的启动特性有关,过高或过低的极弧系数可能导致电机无法正常启动或产生过大的启动电流。
对于某些特定的应用领域,如航天航空等,电机的运行稳定性尤为重要。
合适的极弧系数可以减少电机振动和噪音,使其在高速运行时更加稳定。
在设计电机时,选择合适的极弧系数是非常关键的。
在决定极弧系数时,设计人员需要考虑到电机的转动速度、功率需求、噪音要求等多方面因素。
一个常见的做法是采用优化设计方法,根据不同的需求,通过模拟和实验等手段来确定合适的极弧系数。
总结起来,9槽12极极弧系数是电机的一个重要参数,用于描述一个9槽12极电机中极弧的形状和占比。
合适的极弧系数可以提高电机的效率、启动特性和运行稳定性。
在电机设计中,选择合适的极弧系数是非常重要的,并需要考虑到电机的转速、功率需求和噪音要求等多方面因素。
通过优化设计,可以确定最佳的极弧系数,以满足特定应用领域的需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本题库是海尔集团面试-内部真实评分标准,总计有100
个题库。
物超所值
-内部真实面试案例,总计有100个题库。
物超所值,学会本文面试通过率提高90%
海尔集团面试经验总结:
海尔集团是4轮
一面组长,会问到一些这样的问题,为什么会离职,为什么来海尔集团,婚姻状况,与此同时有没有想问面试官的问题。
二面经理,偏向于部门业务服务。
有业务上的试卷需要考试。
三面经理,这一轮会谈到一些业务目标和工作中可能出现的一些问题。
大概聊一下工作的想
法,部门的价值和目标,对这个岗位的期望等等以及海尔集团和行业的情况。
聊天的内容与面试者个人有关,可多可少。
(二三是交叉面试防止作弊),
四面职业通道委员会,这一轮的面试非常专业,为技术专家面,目的是定级。
确定你面试者的水平大概在什么位置。
直接影响后面的收入。
各个击中要害。
不要想着有简单跳过的部分。
在介绍工作内容的过程中,要先介绍自己在组织团队所处的位置,发挥的作用,工作绩效等,条例要清楚。
这一轮的面试专业性最强。
最后是HR谈薪资的部分,因为行业都有规则,所以时间不会太长。
5面背景调查,主要是面试者在填写简历时提供的名字和联系方式,其中包含领导。
HR最后offer。
步骤四、五、六每个一个星期,比如三面完后得到职业通道委员会的面试的通知约一周,四面完后,得到通过与否的消息是一个星期。
如果某一步一个星期多没消息,那就是没戏了。
面试的重点分享:
面试的气氛需要注意的:
1面试不能一脸严肃,显得很紧张,要适当微笑。
给面试官的印象好。
2面试官提问的问题,不能对抗反驳提问。
即使面试官的问题比较苛刻。
细节决定成败,面试如同相亲,面试官会注意到每个细节,身上有没有烟味,头发是不是整齐,说话条例要清晰,一定要集中精神,面试等待的时候也不能看手机。
自我介绍的时候要强调身体健康可以加班。
可以在最后自己介绍的时候,表示出强烈的来工作,一展抱负的意思。
让面试官感受你的积极一面。
面试最重要的3点
1要高度认同面试公司的工作文化和理念。
2要强调自己不断学习。
不断成长,能承受压力。
3千万不能说因为自己考试,希望的工作是轻松的,清闲的。
最重要的2点要高度认同面试公司的工作文化和理念。
面试前要上公司网站查看下这个公司的文化理念,如果在面试过程把这个点说出来,是要加分非常多的。
收尾阶段
面试官一般会问:“你还有什么问题想问我们?”这个时候千万别不问,有啥没啥的都一定要问两个问题,一个问题可以涉及技术层面,另一个可以涉及应聘职位的发展问题.
前公司的离职原因是必问的问题,不能说前公司太多的不好,可以说因为其他原因,
离职原因:优秀回答:
A:原来公司亏损,减员,所以申请离职。
B:原来的公司,更换股东,战略有调整,人员调整。
C 原来的公司,因为搬家,搬家到很远的地方,过去不方便。
D 原来的公司,调整作息时间,周二放假,周日上班。
E 自己想要成长,希望可以更换岗位,挑战新的岗位,新的工作。
学会本文的100个问题,绝对可以让你在面试的赢在起跑线上,本文都是真实的成功案例分享。
自我介绍:
是被面试者在纸面之外最能够呈现能力的一个地方。
一般情况下,也是被面试者在整个面试过程中惟一一次主动展示自我的机会
第一,考察自我介绍内容和递交简历内容是否相冲突?如果简历是真实的,口述自我介绍就不会有明显出入。
如果简历有假,自我介绍阶段一般就会漏马脚。
如被面试者反问:“我的经历在简历里都写了”,面试官会认为这人得瑟,印象分一下子降为负数。
第二,考察被面试者基本的逻辑思维能力、语言表达能力,总结提炼概括能力。
第三,考察被面试者是否聚焦,是否简练和精干,现场的感知能力与把控能力。
第四,考察被面试者初步的自我认知能力和价值取向。
因为被面试者要叙述职业切换关键节点处的原因,尤其要考察最近职业变动的原因。
第五,考察被面试者是否听明白了面试官的话以及时间的掌控能力。
有时面试官给出的问题是“请您用3到5分钟做一自我介绍”,被面试者有时一介绍就超过10分钟
试题0、你对加班的看法?
A、加班有工资,我愿意加班。
B、我干什么都很出色。
不需要加班。
C、加班不等于效率高,最好的是工作时间完成所需工作
D、如果有紧急的加班是理所当然的,是负责的提现。
我正年轻,擅长加班处理紧急工作。
解析:
A、错误。
公司是希望很多员工是有自愿加班的精神,而不是必须有加班工资
B、错误。
回答太自大,有点浮夸,不靠谱的感觉。
C、错误。
勉强合格,但是没有提现作为员工对公司负责人的精神。
D回答正确。
最佳回答。
回答样本:如果是工作需要我会义不容辞加班,我现在单身,没有任何家庭负担,可以全身心的投入工作。
但同时,我也会提高工作效率,减少不必要的加班。
回答提示:
实际上好多公司问这个问题,并不证明一定要加班,只是想测试你是否愿意为公司奉献。
试题1:为什么你是这份工作的最佳人选?
A、我干过不少这种职位,我的经验将帮助我胜任这一岗位。
B、我干什么都很出色。
C、通过我们之间的交流,我觉得这里是一个很好的工作地点。
D、你们需要可以生产出“效益”的人,而我的背景和经验可以证明我的能力,例如:我曾经……
解析:
A、错误。
经验是好的,但“很多相同职位”也许更让人觉得你并不总能保证很好的表现。
B、错误。
很自信的回答,但是过于傲慢。
对于这种问题合适的案例和谦虚更重要。
C、错误。
这对雇主来说是一个很好的恭维,但是过于自我为中心了,答非所问。
应该指出你能为雇
主提供什么。
D、最佳答案。
回答问题并提供案例支持在这里是最好的策略。
试题2:描述一下你自己。
A、列举自己的个人经历、业余兴趣爱好等。
B、大肆宣扬一下自己良好的品德和工作习惯。
C、列举3个自己的性格与成就的具体案例。
解析:。