超前进位加法器的设计
超前进位加法器的设计原理_概述及解释说明
超前进位加法器的设计原理概述及解释说明1. 引言1.1 概述超前进位加法器是一种用于在数字电路中进行二进制数的加法运算的特殊电路。
相较于传统的二进制加法器,超前进位加法器通过预先计算进位,从而实现更快速的运算。
本文旨在对超前进位加法器的设计原理进行概述和解释说明。
1.2 文章结构本文分为五个主要部分,分别是引言、超前进位加法器的设计原理、实现步骤和流程、优势与应用范围以及结论。
首先介绍引言部分,接下来详细解释超前进位加法器的设计原理,然后说明实现步骤和流程。
之后介绍该加法器的优势及其应用范围,并最后得出结论。
1.3 目的本文旨在向读者阐明超前进位加法器的设计原理并提供相关解释说明。
对于数字电路领域的研究者和工程师而言,了解超前进位加法器背后的原理可以帮助他们更好地应用这一技术,并且展示其在优势与应用范围方面所具备的潜力。
2. 超前进位加法器的设计原理2.1 超前进位加法器的定义和背景超前进位加法器是一种常用于数字电路中的加法器,用来实现两个二进制数的相加操作。
与传统的普通进位加法器不同,超前进位加法器在进行计算时能够提前计算并预测进位信号,从而减少计算时间并提高加法运算速度。
2.2 原理解释超前进位加法器采用了两级运算的方式,利用了先行进位预测的思想,以优化传统加法器的运算效率。
其基本原理如下:- 首先,对于每一位(bit)进行相应位置的逻辑门电路设计。
- 然后,在相邻位之间引入前导输入(Generate input)和进位输出(Carry output),这样可以使得下一级可以预测到当前级别产生的所有可能进位。
- 通过与门、或门和异或门等逻辑门之间巧妙的组合连接,实现了高速、低功耗的超前进位运算。
超前进位加法器主要依靠已知最高有效输入块(G代表Generate, P代表Propagate, C代表Carry In) 确定其对应输出(S代表Sum, C代表Carry Out),并将这些信息传递给下一级加法器。
超前进位加法器设计(参考资料)
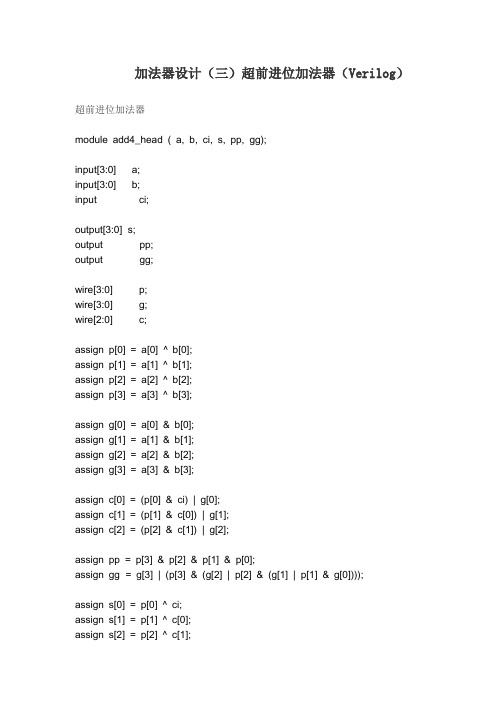
加法器设计(三)超前进位加法器(Verilog)超前进位加法器module add4_head ( a, b, ci, s, pp, gg);input[3:0] a;input[3:0] b;input ci;output[3:0] s;output pp;output gg;wire[3:0] p;wire[3:0] g;wire[2:0] c;assign p[0] = a[0] ^ b[0];assign p[1] = a[1] ^ b[1];assign p[2] = a[2] ^ b[2];assign p[3] = a[3] ^ b[3];assign g[0] = a[0] & b[0];assign g[1] = a[1] & b[1];assign g[2] = a[2] & b[2];assign g[3] = a[3] & b[3];assign c[0] = (p[0] & ci) | g[0];assign c[1] = (p[1] & c[0]) | g[1];assign c[2] = (p[2] & c[1]) | g[2];assign pp = p[3] & p[2] & p[1] & p[0];assign gg = g[3] | (p[3] & (g[2] | p[2] & (g[1] | p[1] & g[0])));assign s[0] = p[0] ^ ci;assign s[1] = p[1] ^ c[0];assign s[2] = p[2] ^ c[1];assign s[3] = p[3] ^ c[2];endmodule首先要明确几个概念:p表示进位否决信号(pass),如果p为0就否决调前一级的进位输入。
否决的意思就是即使前一级有进位,本级也不会向后一级产生进位输出。
4bits超前加法进位器的全定制设计微电子卓越班数字集成电路课程设计报告
数字集成电路课程设计题目:4 bits超前加法进位器的全定制设计姓名:席高照学号:111000833学院:物理与信息工程学院专业:微电子(卓越班)年级:2010级指导教师:群超(签名)2013 年 6 月 3 日目录第1章概述 (1)1.1课程设计目的 (1)1.2课程设计的主要容 (1)1.2.1设计题目 (1)1.2.2设计容 (1)第2章功能分析及逻辑分析 (2)2.1功能分析 (2)2.2推荐工作条件 (3)2.3电性能 (3)2.4真值表 (6)2.5表达式 (6)2.6电路图 (7)第3章电路设计与器件参数设计 (8)3.1性能指标: (8)3.2模块划分 (8)3.2.1输出级电路设计 (8)3.2.2部反相器 (9)3.2.3部电路等效 (9)3.2.4输入级电路 (10)3.2.5输出缓冲级电路 (10)3.2.6输入、输出保护电路 (10)3.3本章小结 (11)第4章电路模拟与仿真 (12)4.1电路搭建 (12)4.1.1建立新库 (12)4.1.2建立SCHEMATIC VIEW (13)4.1.3建立SYMBOL (14)4.1.4建立总体电路SCHEMATIC VIEW (14)4.1.5建立总体SYMBOL (15)4.1.6测试电路 (16)4.2功能仿真 (16)4.3功耗仿真 (18)4.4仿真结果分析 (18)4.5本章小结 (18)5.2反相器版图 (19)5.3输入级 (20)5.4输出级 (20)5.5输出缓冲 (20)5.6异或门 (21)5.7或非门 (23)5.8与非门 (24)5.9整体版图 (25)5.10本章小结 (25)心得 (26)参考文献 (27)附录 (28)附录174LS283中文资料 (28)第1章概述1.1 课程设计目的•综合应用已掌握的知识•熟悉集成电路设计流程•熟悉集成电路设计主流工具•强化学生的实际动手能力•培养学生的工程意识和系统观念•培养学生的团队协作能力1.2 课程设计的主要容1.2.1 设计题目4bits超前进位加法器全定制设计1.2.2 设计要求Vdd=1.8V,VoH=4.6V,Vol=0.4V可驱动10个LSTTL电路(相对于15pf电容负载)1.2.3 设计容•功能分析及逻辑分析•电路设计及器件参数设计•估算功耗与延时•电路模拟与仿真•版图设计•版图数据提交及考核,课程设计总结第2章功能分析及逻辑分析2.1功能分析74283为4为超前进位加法器,不同于普通串行进位加法器由低到高逐级进位,超前进位加法器所有位数的进位大多数情况下同时产生,运算速度快,电路结构复杂。
4bits超前进位加法器全定制设计实验报告
TPLH
Propagation Delay Time
A1~A4,B1~B4到C4
3
ns
TPHL
3
tT
2.5
tP
2.5
Av Power
4
Layout Area
150*180
2.5真值表
2.6逻辑图
工艺的主要参数(smic18工艺)
参数
参数定义
PMOS数值
NMOS数值
U0
迁移率
8.661m
34m
Vth
-0.4
mA
IOL
Low Level OutputVoltage
8
mA
2.3直流特性
Symbol
Parameter
Test Condition
Value
Units
TA=25°C
Min
Typ
Max
VOH
High Level OutputVoltage
VCC=Min,IOH=Max
VIL=Max,VIH=Min
mA
C0
-0.4
II
InputCurrent @ Max Input Voltage
VCC=Max
VI=7.2V
A,B
0.2
mA
C0
0.1
ICC
Supply Current
VCC=Maxl
Parameter
From (Input )to (Ouput)
Test Condition
(2)点选LM视窗上面的工具列File→New→Library;
(3)会产生New Library画面;
(4)在框内填入库名;
16位超前进位加法器实验报告
实验名称:十六位超前进位加法器一、实验目的设计、验证并优化16位超前进位加法器的逻辑功能。
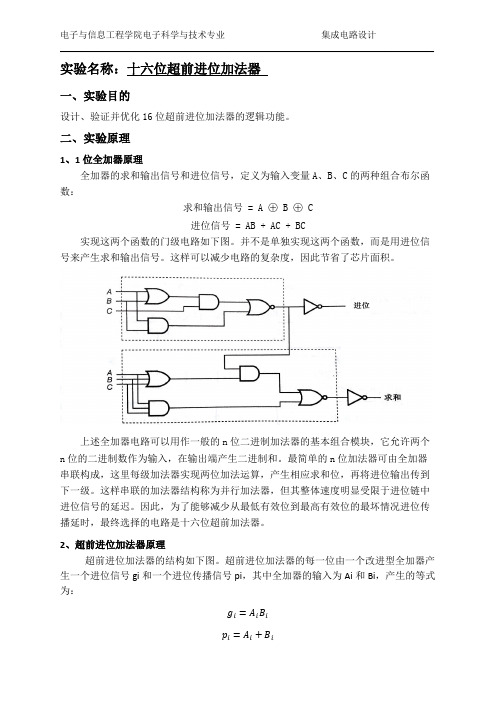
二、实验原理1、1位全加器原理全加器的求和输出信号和进位信号,定义为输入变量A、B、C的两种组合布尔函数:求和输出信号 = A ⊕ B ⊕ C进位信号 = AB + AC + BC实现这两个函数的门级电路如下图。
并不是单独实现这两个函数,而是用进位信号来产生求和输出信号。
这样可以减少电路的复杂度,因此节省了芯片面积。
上述全加器电路可以用作一般的n位二进制加法器的基本组合模块,它允许两个n 位的二进制数作为输入,在输出端产生二进制和。
最简单的n位加法器可由全加器串联构成,这里每级加法器实现两位加法运算,产生相应求和位,再将进位输出传到下一级。
这样串联的加法器结构称为并行加法器,但其整体速度明显受限于进位链中进位信号的延迟。
因此,为了能够减少从最低有效位到最高有效位的最坏情况进位传播延时,最终选择的电路是十六位超前加法器。
2、超前进位加法器原理超前进位加法器的结构如下图。
超前进位加法器的每一位由一个改进型全加器产生一个进位信号gi和一个进位传播信号pi,其中全加器的输入为Ai和Bi,产生的等式为:改进的全加器的进位输出可由一个进位信号和一个进位传输信号计算得出,因此进位信号可改写为:式中可以看出,当gi = 1(Ai = Bi = 1)时,产生进位;当pi = 1(Ai =1或Bi = 1)时,传输进位输入,这两种情况都使得进位输出是1。
近似可以得到i+2和i+3级的进位输出如下:下图为一个四位超前进位加法器的结构图。
信号经过pi和gi产生一级时延,经过计算C产生一级时延,则A,B输入一旦产生,首先经过两级时延算出第1轮进位值C’不过这个值是不正确的。
C’再次送入加法器,进行第2轮2级时延的计算,算出第2轮进位值C,这一次是正确的进位值。
这里的4个4位超前进位加法器仍是串行的,所以一次计算经过4级加法器,一级加法器有2级时延,因此1次计算一共经过8级时延,相比串行加法器里的16级时延,速度提高很多。
四位超前进位加法器
1.课程设计名称四位超前进位加法器2.课程设计内容设计一个四位加法器,要求要有超前进位,减小输出的延迟,采用0.13um工艺设计。
3.课程设计目的训练学生综合运用学过的数字集成电路的基本知识,独立设计相对复杂的数字集成电路的能力。
4.课程设计要求4.1、按设计指导书中要求的格式书写,所有的内容一律打印;4.2、报告内容包括设计过程、仿真的HSPICE网表,软件仿真的结果及分析、延时的手工计算;4.3、要有整体电路原理图,仿真的波形图;4.4、软件仿真必须要有必要的说明;要给出各个输入信号的具体波形和输出信号的测试结果。
4.5、写出对应的HSPICE设计网表,网表仿真结果符合设计要求。
把仿真图形附在报告上。
4.6、设输入端的电容为C,输出端的负载电容为5000C inv,从输入到输出任意找一通inv路,优化通路延时,手工计算确定通路中每个门对应的晶体管的尺寸。
每组三个同学选择不能为同一通路。
此部分的计算参数可采用书中第六章的参数。
4.7、各种器件的具体结构可参考阎石的《数字电子技术基础》一书。
不允许有完全一样的报告,对于报告完全相同者,记为不及格。
5.使用软件软件为HSPICE和COSMOS-SCOPE。
6.课程设计原理由全加器的真值表可得S i和C i的逻辑表达式:定义两个中间变量G i和P i:当A i=B i=1时,G i=1,由C i的表达式可得C i=1,即产生进位,所以G i 称为产生量变。
若P i=1,则A i·B i=0,C i=C i-1,即P i=1时,低位的进位能传送到高位的进位输出端,故P i称为传输变量,这两个变量都与进位信号无关。
将G i和P i代入S i和C i得:进而可得各位进位信号的逻辑表达如下:根据逻辑表达式做出电路图(如图):逻辑功能图中有2输入异或门,2输入与门,3输入与门,4输入与门,2输入或门,3输入或门,4输入或门,其转化成CMOS晶体管图如下:7.课程设计网表*xor 2.subckt xor2 a b c d fmxorpa 1 a vdd vdd pmos l=2 w=8 mxorpb f d 1 vdd pmos l=2 w=8 mxorpc 2 b vdd vdd pmos l=2 w=8 mxorpd f c 2 vdd pmos l=2 w=8 mxorna f a 3 0 nmos l=2 w=4 mxornb 3 b 0 0 nmos l=2 w=4 mxornc f c 4 0 nmos l=2 w=4 mxornd 4 d 0 0 nmos l=2 w=4.ends xor2*and2.subckt and2 a b fmandpa f a vdd vdd pmos l=2 w=4 mandpb f b vdd vdd pmos l=2 w=4mandna f a 1 0 nmos l=2 w=4 mandnb 1 b 0 0 nmos l=2 w=4.ends and2*and3.subckt and3 a b c fmandpa f a vdd vdd pmos l=2 w=4 mandpb f b vdd vdd pmos l=2 w=4 mandpc f c vdd vdd pmos l=2 w=4 mandna f a 1 0 nmos l=2 w=6 mandnb 1 b 2 0 nmos l=2 w=6 mandnc 2 c 0 0 nmos l=2 w=6.ends and3*and4.subckt and4 a b c d fmandpa f a vdd vdd pmos l=2 w=4 mandpb f b vdd vdd pmos l=2 w=4 mandpc f c vdd vdd pmos l=2 w=4 mandpd f d vdd vdd pmos l=2 w=4 mandna f a 1 0 nmos l=2 w=8 mandnb 1 b 2 0 nmos l=2 w=8 mandnc 2 c 3 0 nmos l=2 w=8 mandnd 3 d 0 0 nmos l=2 w=8.ends and4*or2.subckt or2 a b fmorpa 1 a vdd vdd pmos l=2 w=8 morpb f b 1 vdd pmos l=2 w=8 mna f a 0 0 nmos l=2 w=4mnb f b 0 0 nmos l=2 w=4.ends or2*or3.subckt or3 a b c fmorpa 1 a vdd vdd pmos l=2 w=12 morpb 2 b 1 vdd pmos l=2 w=12 morpc f c 2 vdd pmos l=2 w=12 mna f a 0 0 nmos l=2 w=4mnb f b 0 0 nmos l=2 w=4mnc f c 0 0 nmos l=2 w=4.ends or3*or4.subckt or4 a b c d fmorpa 1 a vdd vdd pmos l=2 w=16morpb 2 b 1 vdd pmos l=2 w=16morpc 3 c 2 vdd pmos l=2 w=16morpd f d 3 vdd pmos l=2 w=16mna f a 0 0 nmos l=2 w=4mnb f b 0 0 nmos l=2 w=4mnc f c 0 0 nmos l=2 w=4mnd f d 0 0 nmos l=2 w=4.ends or4*not.subckt not a fmnotpa f a vdd vdd pmos l=2 w=4 mnotna f a 0 0 nmos l=2 w=2.ends not *反相器*or21.subckt or21 a b fxor2 a b 1 or2xnot 1 f not.ends or21 *2输入或门*or31.subckt or31 a b c fxor3 a b c 1 or3xnot 1 f not.ends or31 *3输入或门*or41.subckt or41 a b c d fxor4 a b c d 1 or4xnot 1 f not.ends or41 *4输入或门*xor21.subckt xor21 a b fxm a A5 notxn b B5 notxxor a b A5 B5 f xor2.ends xor21 * 2输入异或门*and21.subckt and21 a b fxand2 a b 1 and2xnot 1 f not.ends and21 *2输入与门*and31.subckt and31 a b c fxand3 a b c 1 and3xnot 1 f not.ends and31 *3输入与门*and41.subckt and41 a b c d fxand4 a b c d 1 and4xnot 1 f not.ends and41 *4输入与门xxor211 a1 b1 p1 xor21xxor212 a2 b2 p2 xor21xxor213 a3 b3 p3 xor21xxor214 a4 b4 p4 xor21xand211 a1 b1 g1 and21xand212 a2 b2 g2 and21xand213 a3 b3 g3 and21xand214 p1 c0 m0 and21xor211 m0 g1 c1 or21 *进位C1xand311 p2 p1 c0 m1 and31xand215 p2 g1 m2 and21xor312 g2 m1 m2 c2 or31 *进位C2 xand411 p3 p2 p1 c0 m3 and41xand313 p3 p2 g1 m4 and31xand216 p3 g2 m5 and21xor412 m3 m4 m5 g3 c3 or41 *进位C3 xxor215 p1 c0 s1 xor21 *输出s1xxor216 p2 c1 s2 xor21 *输出s2xxor217 p3 c2 s3 xor21 *输出s3xxor218 p4 c3 s4 xor21 *输出s4.include "c:\lib\130nm_bulk.l"tt.opt scale=0.05u.global vdd gndvdd vdd 0 1.2va1 a1 0 pulse 1.2 1.2 20n 1f 1f 30n 100nva2 a2 0 pulse 0 0 20n 1f 1f 30n 100nva3 a3 0 pulse 0 0 20n 1f 1f 30n 100nva4 a4 0 pulse 0 0 20n 1f 1f 30n 100nvb1 b1 0 pulse 1.2 1.2 20n 1f 1f 30n 100n vb2 b2 0 pulse 1.2 1.2 20 1f 1f 30n 100nvb3 b3 0 pulse 0 0 20n 1f 1f 30n 100nvb4 b4 0 pulse 1.2 1.2 20n 1f 1f 30n 100nvc0 c0 0 pulse 0 0 4n 1f 1f 0n 100n.tran 1n 100n.plot tran v(s1).plot tran v(s2).plot tran v(s3).plot tran v(s4).end8.结果及分析由波形可知:当输入a1=1,b1=1,前一级进位c0=0时,s1=a1+b1+c0=0,下一级进位c1=1.由波形可知:当输入a2=0,b2=1,前一级进位c1=1时,s2=a2+b2+c1=0,下一级进位c2=1.由波形可知:当输入a3=0,b3=0,前一级进位c2=1时,s3=a3+b3+c2=1,下一级进位c3=0.由波形可知:当输入a4=0,b4=1,前一级进位c3=0时,s4=a4+b4+c2=1。
组成原理-超前进位加法器设计
《计算机组成原理》实验报告专业:学号:学生姓名:实验日期:实验二一、实验名称:超前进位加法器设计二、实验目的:1 掌握超前进位加法器的原理及其设计方法。
2 熟悉CPLD 应用设计及EDA 软件的使用。
三、实验设备:PC 机一台,TD-CMA 实验系统一套,排线若干。
四、实验内容:1.了解加法器的工作原理,掌握超前进位产生电路的设计方法.2.正确将电路原理图下载到试验箱中.3.正确通过实验箱连线实现4位二进制数的相加并得到正确结果五、实验原理:加法器是执行二进制加法运算的逻辑部件,也是CPU 运算器的基本逻辑部件(减法可以通过补码相加来实现)。
加法器又分为半加器和全加器(FA),不考虑低位的进位,只考虑两个二进制数相加,得到和以及向高位进位的加法器为半加器,而全加器是在半加器的基础上又考虑了低位过来的进位信号。
表1-2-1 1 位全加器真值表A、B 为2 个1 位的加数,Ci 为来自低位的进位,S 为和,Co 为向高位的进位,根据表1-2-1所示的真值表,可得到全加器的逻辑表达式为:S = ABCi + ABCi + ABCi + ABCiCo = AB+ ACi + BCi根据逻辑表达式,可得到如图1-2-1 所示的逻辑电路图。
有了 1 位全加器,就可以用它来构造多位加法器,加法器根据电路结构的不同,可以分为串行加法器和并行加法器两种。
串行加法器低位全加器产生的进位要依次串行地向高位进位,其电路简单,占用资源较少,但是串行加法器每位和以及向高位的进位的产生都依赖于低位的进位,导致完成加法运算的延迟时间较长,效率并不高。
C0 = 0Ci+1 = AiBi + AiCi + BiCi = AiBi + (Ai + Bi)Ci设gi = AiBipi = Ai + Bi则有:Ci+1 = gi + piCi= gi + pi(gi-1 + pi-1Ci-1)= gi + pi(gi-1 + pi-1(gi-2 + pi-2Ci-2))…= gi + pi (gi-1 + pi-1(gi-2 + pi-2(…(g0 + p0C0)…)))= gi + pigi-1 + pipi-1gi-2 + … + pipi-1…p1g0 + pipi-1…p1p0C0由于gi、pi 只和Ai、Bi 有关,这样Ci+1 就只和Ai、Ai-1、…、A0,Bi、Bi-1、…、B0 及C0有关。
试验二 超前进位加法器 设计
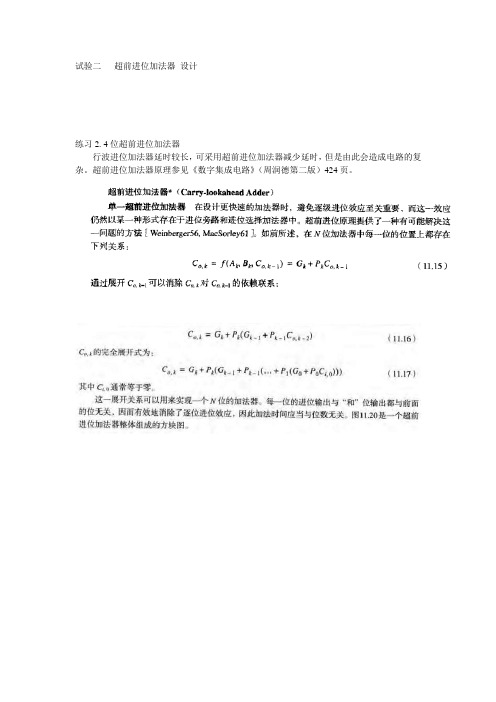
试验二超前进位加法器设计练习2. 4位超前进位加法器行波进位加法器延时较长,可采用超前进位加法器减少延时,但是由此会造成电路的复杂。
超前进位加法器原理参见《数字集成电路》(周润德第二版)424页。
对以上公式的注解:公式中的C O,K 表示第K 为的进位输出,G K 为第K 位的进位产生,P K 为第K 为的进位传播。
且:K K KK K KG A B P A B ==⊕ A K ,B K 为输入加数的第K 位。
将Co 和S 用G,P 重写为: O ii C G PC S P C =+=⊕由于低位的输出进位是高位的输入进位,所以有上面的(11.15)式源程序://this is a carry lookahead of 4bitmodule clad(ina,inb,ci,co,sum);input[3:0] ina,inb;input ci;output co;output[3:0]sum;wire co0,co1,co2,G0,G1,G2,G3,P0,P1,P2,P3;assignG0=ina[0]&inb[0],P0=ina[0]^inb[0],G1=ina[1]&inb[1],P1=ina[1]^inb[1],G2=ina[2]&inb[2],P2=ina[2]^inb[2],G3=ina[3]&inb[3],P3=ina[3]^inb[3],co0=G0|(P0&ci),co1=G1|(P1&co0),co2=G2|(P2&co1),co=G3|(P3&co2),sum[0]=P0^ci,sum[1]=P1^co0,sum[2]=P2^co1,sum[3]=P3^co2;endmodule测试程序:module clad_test;reg[3:0] ina,inb;reg ci;wire co;wire[3:0]sum;clad CI(.ina(ina),.inb(inb),.ci(ci),.co(co),.sum(sum)); initialbeginina=0;inb=0;ci=0;endalways #5 ina=ina+1'b1;always #80 inb=inb+1'b1;always #1280 ci=~ci;endmodule仿真结果:注:该结果为10进制显示练练手:参考《数字集成电路》(周润德第二版)420-421,设计一个16位的超前进位加法器,基本单元使用4位的加法器,结构自选。
超前进位加法器的设计分解
超前进位加法器的设计分解沈阳航空航天大学课程设计报告课程设计名称:计算机组成原理课程设计课程设计题目:超前进位加法器的设计院(系):计算机学院专业:计算机科学与技术班级:学号:姓名:指导教师:完成日期:2014年01月10日第2章详细设计方案2.1 顶层方案图的设计与实现顶层方案图主要实现一位全加器的逻辑功能,采用原理图设计输入方式完成,超前进位加法器电路的是实现基于XCV200可编程逻辑芯片。
在完成原理图的功能设计后,经过检测调试,把输入/输出信号通过引脚编号安排到XCV200指定的引脚上去,最终实现芯片的引脚锁定。
2.1.1顶层方案的整体设计顶层图形文件主要由2个四位超前进位加法器构成,总共17位输入,9位输出。
顶层图形文件由Xilinx Foundation F3.1软件编辑得到相应的模块,顶层图形的整体设计如下图2.1所示:图 2.1八位超前进位加法器整体设计图2.1.2元器件选择和引脚锁定(1)元器件的选择由于在设计的过程中,硬件设计环境是基于伟福COP2000型计算机组成原理实验仪和XCV200实验板,故采用的目标芯片为Xilinx XCV200可编程逻辑芯片。
(2)引脚锁定在Xilinx Foundation F3.1上面完成软件的设计之后,把顶层图形文件中的输入/输出信号用引脚编号安排到Xilinx XCV200芯片指定的引脚上去,从而实现芯片的设计电路的引脚锁定,各信号及Xilinx XCV200芯片引脚对应关系如下表2.1所示:表 2.1 信号和芯片引脚对应关2.2 功能模块的设计与实现在八位超前进位加法器和四位超前进位加法器的设计中均是采用Schematic 设计输入方式,而在四位超前进位加法器的设计中是由一列的门电路构成,最后在由2个四位超前进位加法器模块构成8位超前进位加法器。
可以扩展开来,16位,32位超前进位加法器原理类似8位的设计原理。
2.2.1 八位超前进位加法器的设计与实现(1)设计描述根据上面在1.1中讲述的四位超前进位加法器的设计原理那样,四位超前进位加法器的实现是建立在进位C1,C2,C3,C4的基础之上的。
16位超前进位加法器

16位超前进位加法器设计目录摘要 (1)1需求分析1.1加法器的发展........................................................................ 错误!未定义书签。
1.2几种串行加法器性能比较 (3)1.2.1串行进位加法器 (3)1.2.1超前进位加法器 (3)2主要内容 (4)2.1设计原理 (6)2.2设计思路 (4)3 设计思想 (5)4 实现方法 (6)4.1顶层方案图的设计与实现 (6).4.1.1顶层方案的整体设计 (6)4.1.2元器件选择和引脚锁定 (7)4.2功能模块的设计与实现 (8)4.2.1设计描述 (8)4.2.2创建RTL代码并得到电路图....................................................... .94.3功能仿真 (11)4.4编程与下载 (12)4.5硬件仿真结果 (12)5小结 (13)参考文献 (13)附录 (14)摘要:加法运算是最重要最基本的运算,所有的其他基本算术运算乘除等都最终可以用加法运算来表示在不同的场合对加法器的要求不同,要的要求速度快有的要求面积小超前进位加法器相比于串行进位加法器是一种快速加法运算器,根据用户的要求追求速度与面积的平衡。
关键词:超前进位加法器串行进位加法器速度面积1需求分析1.1 加法器的发展加法运算是最基本的运算,所有其他基本算术运算都是以加法运算为基础。
但因为加法运算存在进位问题,使得某一位计算结果的得出和所有低于他的位相关,因此,为了减少进位传输所耗的时间提高计算速度人们设计了多种类型的加法器。
如跳跃进位加法器,进位选择加法器,超前进位加法器等他们都是利用各位之间的状态来预先产生高位进位信号从而减少进位从低位到高位的传递时间1.2 几种加法器的性能比较1.2.1串行进位加法器串行进位加法器的每一位加和值都依赖于上一位进位信号,即进位信号是串行的经过加法器的每一位。
数字电路课程设计之超前进位加法器
reg
Cin;
wire[3:0] S;
wire
Cout;
carry_look_add CAL (.A(A),.B(B),.Cin(Cin),.Cout(Cout),.S(S)); initial begin
#10 A=4'd0;B=4'd0;Cin=0; #10 A=4'd11;B=4'd1;Cin=0; #10 A=4'd10;B=4'd12;Cin=0; #10 A=4'd11;B=4'd4;Cin=0; #100 $stop; end endmodule
Pi=Ai○+ Bi;
可以得到输出与进位表达
Gi=AiBi;
Si=Pi○+ Ci;
Ci+1=Gi+PiCi; Gi 为进位产生,不管输入进位 Ci 为什么,只要 Ai 与 Bi 为 1 时,它将产生进位。Pi 称为进位传输,因为它 与从 Ci 到 Ci+1 的进位传输有关
C0 = 输入进位
C1 = G0 + P0C0
Half_Add H3(.a(A[2]),.b(B[2]),.s(v6),.c(v5));
Half_Add H4(.a(A[3]),.b(B[3]),.s(v8),.c(v7));
carry_look
CL1(.C0(Cin),.P0(v2),.G0(v1),.P1(v4),.G1(v3),.P2(v6),.G2(v5),.P3(v8),.G3(v7),.C1(o1),.C2(o2),.C3(o3),.C4(Cout));
注意 C4 并不需要等待 C3,实际上 C4,C3,C2,C1 同时传输 超前进位产生的电路逻辑图
超前进位加法器
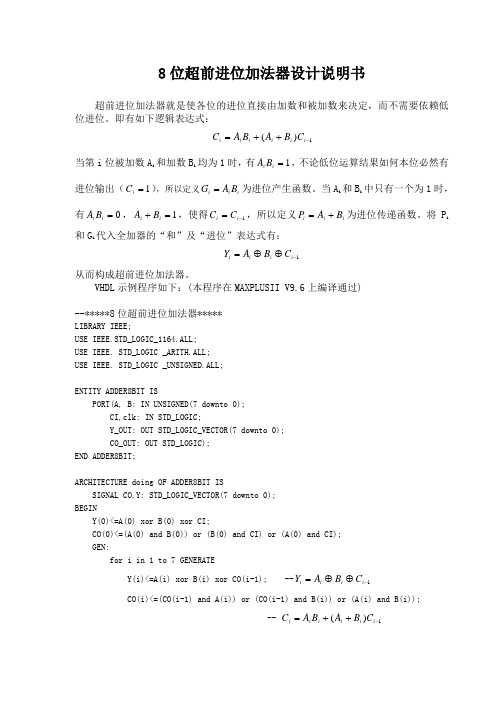
8位超前进位加法器设计说明书超前进位加法器就是使各位的进位直接由加数和被加数来决定,而不需要依赖低位进位。
即有如下逻辑表达式:1)(-++=i i i i i i C B A B A C当第i 位被加数A i 和加数B i 均为1时,有1=i i B A ,不论低位运算结果如何本位必然有进位输出(1=i C ),所以定义i i i B A G =为进位产生函数。
当A i 和B i 中只有一个为1时,有0=i i B A ,1=+i i B A ,使得1-=i i C C ,所以定义i i i B A P +=为进位传递函数。
将P i 和G i 代入全加器的“和”及“进位”表达式有:1-⊕⊕=i i i i C B A Y从而构成超前进位加法器。
VHDL 示例程序如下:(本程序在MAXPLUSII V9.6上编译通过)--*****8位超前进位加法器*****LIBRARY IEEE;USE IEEE.STD_LOGIC_1164.ALL;USE IEEE. STD_LOGIC _ARITH.ALL;USE IEEE. STD_LOGIC _UNSIGNED.ALL;ENTITY ADDER8BIT ISPORT(A, B: IN UNSIGNED(7 downto 0);CI,clk: IN STD_LOGIC;Y_OUT: OUT STD_LOGIC_VECTOR(7 downto 0);CO_OUT: OUT STD_LOGIC);END ADDER8BIT;ARCHITECTURE doing OF ADDER8BIT ISSIGNAL CO,Y: STD_LOGIC_VECTOR(7 downto 0);BEGINY(0)<=A(0) xor B(0) xor CI;CO(0)<=(A(0) and B(0)) or (B(0) and CI) or (A(0) and CI);GEN:for i in 1 to 7 GENERATEY(i)<=A(i) xor B(i) xor CO(i-1); --1-⊕⊕=i i i i C B A YCO(i)<=(CO(i-1) and A(i)) or (CO(i-1) and B(i)) or (A(i) and B(i)); -- 1)(-++=i i i i i i C B A B A Cend GENERATE;process(clk)beginif clk'event and clk='1' thenY_OUT<=Y(7) & Y(6) & Y(5) & Y(4) & Y(3) & Y(2) & Y(1) & Y(0);CO_OUT<=CO(7);end if;end process;END doing;附:仿真时序波形。
数字电路课程设计之超前进位加法器
# MACRO ./mul_run_msim_rtl_verilog.do PAUSED at line 14
通过查阅资料将 Verilog 测试文件
Timsbench 文件没有实例化,修改为
修改后仿真 OK 参考文献: 1.数字设计与 Verilog 实现 M.Morris Mano 著 第五版
Pi=Ai○+ Bi;
可以得到输出与进位表达
Gi=AiBi;
Si=Pi○+ Ci;
Ci+1=Gi+PiCi; Gi 为进位产生,不管输入进位 Ci 为什么,只要 Ai 与 Bi 为 1 时,它将产生进位。Pi 称为进位传输,因为它 与从 Ci 到 Ci+1 的进位传输有关
C0 = 输入进位
C1 = G0 + P0C0
instance name in instantiation of 'carry_look_add'.
#
#
Region: /carry_look_add_tb
# Error loading design
# Error: Error loading design
#
Pausing macro execution
基于 Verilog 的四位超前进位加法器设计
使用 Verilog 语言实现四位超前进位加法器设计,并使用 Quartes 编写程序,使用 modelsin 进行仿真
验证设计
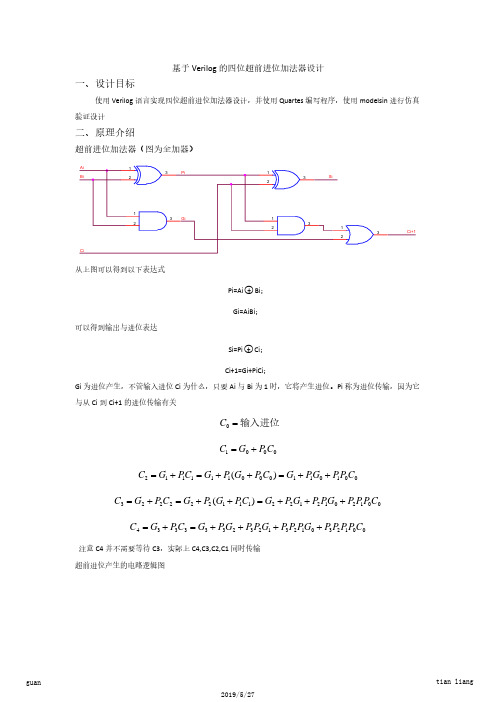
二、原理介绍
超前进位加法器(图为全加器)
Ai
1
3
Pi
Bi
2
1
3
Si
2
1 3 Gi
2
Ci
1
3
计算机组成原理课程设计—超前进位加法器的设计资料
沈阳航空航天大学课程设计报告课程设计名称:计算机组成原理课程设计课程设计题目:超前进位加法器的设计院(系):计算机学院专业:班级:学号:姓名:指导教师:完成日期:沈阳航空航天大学课程设计报告目录第1章总体设计方案 (1)1.1设计原理 (1)1.2设计思路 (2)1.3设计环境 (3)第2章详细设计方案 (4)2.1顶层方案图的设计与实现 (4)2.1.1创建顶层图形设计文件 (4)2.1.2器件的选择与引脚锁定 (5)2.1.3编译、综合、适配 (7)2.2功能模块的设计与实现 (7)2.2四位超前进位加法器模块的设计与实现 (7)2.3仿真调试 (9)第3章编程下载与硬件测试 (11)3.1编程下载 (11)3.2硬件测试及结果分析 (11)参考文献 (13)附录(程序清单或电路原理图) (14)第1章总体设计方案1.1设计原理八位超前进位加法器,可以由2个四位超前进位加法器构成。
由第一个四位超前进位加法器的进位输出作为第二个超前进位加法器的进位输入即可实现八位超前进位加法器的设计。
超前进位产生电路是根据各位进位的形成条件来实现的。
只要满足下述条件,就可形成进位C1、C2、C3、C4。
所以:第一位的进位C1=X1*Y1+(X1+Y1)*C0第二位的进位C2=X2*Y2+(X2+Y2)*X1*Y1+(X2+Y2)(X1+Y1)C0第三位的进位C3=X3*Y3+(X3+Y3)X2*Y2+(X3+Y3)*(X2+Y2)*X1*Y1+(X3+Y3)(X2+Y2)(X1+Y1)*C0第四位的进位C4=X4*Y4+(X4+Y4)*X3*Y3+(X4+Y4)*(X3+Y3) * X2*Y2+(X4+Y4)(X3+Y3)(X2+Y2)*X1*Y1+(X4+Y4)(X3+Y3)(X2+Y2)(X1+Y1)*C0 下面引入进位传递函数Pi和进位产生函数Gi的概念。
它们定义为:Pi=Xi+YiGi=Xi*YiP1的意义是:当X1和Y1中有一个为1时,若有进位输入,则本位向高位传递此进位。
超前进位加法器设计报告解剖
华东交通大学理工学院课程设计报告书所属课程名称EDA课程设计题目超前进位加法器设计分院专业班级学号学生姓名指导教师2013 年7月2日目录第一章设计内容与要求 (3)第二章超前进位加法器设计原理 (3)第三章详细设计流程 (4)3.1.创建工程文件 (4)3.2.程序的编译 (5)3.3.波形的仿真 (7)第四章设计结果分析 (11)第五章源程序代码 (12)第六章心得体会 (14)第七章参考文献 (15)第一章设计内容与要求加法运算是最重要也是最基本的运算,所有的其他基本运算,如减、乘、除运算最终都能归结为加法运算。
但因为加法运算存在进位问题,使得某一位计算结果的得出和所有低于他的位相关。
因此为了减少进位传输所消耗的时间,提高计算速度,人们设计了多种类型的加法器,如跳跃进位加法器、进位选择加法器、超前进位加法器等。
本设计采用的是超前进位加法器。
通过Verilog 设计一个超前8位加法器。
要求在Quartus II软件下,利用Verilog编程完成层次式电路设计,电路中的元件可以用Verilog设计也可以用库元件连线构成再封装。
8位超前进位加法器,借助EDA工具中的综合器,适配器,时序仿真器和编程器等工具进行相应处理。
适配采用Cyclone系列的EP1C6Q240C8。
要求综合出RTL电路,并进行仿真输入波形设计并分析电路输出波形. 试比较并阐述数据类型reg型和wire型的区别。
第二章超前进位加法器设计原理将n个全加器相连可得n位加法器,但是加法时间较长。
解决的方法之一是采用“超前进位产生电路”来同时形成各位进位,从而实现快速加法。
超前进位产生电路是根据各位进位的形成条件来实现的首先对于1位加法器基本位值和与进位输出为1;如果a,b有一个为1,则进位输出等于cin;令G=ab,P=a+b,则有:Cout==ab+(a+b)cin=G+P•cin由此可以G和P来写出4位超前进位链如下(设定四位被加数和加数为A 和B,进位输入Cin,进位输出为cout,进位产生Gi=AiBi,进位传输Pi=Ai+Bi);C0=cin;C1=G0+P0C0=G0+P0•cinC2=G1+P1C1=G1+P1(G0+P0cin)=G1+P1G0+P1P0cinC3=G2+P2C2=G2+P2(G1+P1cin)=G2+P2G1+P2P1G0+P2P1P0cinC4=G3+P3C3=G3+P3(G2+P2C2)=G3+P3G2+P3P2G1+P3P2P1G0+P3P2P1P0cin Cout=c4由超前进位链,各个进位彼此独立产生,将进位级联传播给去掉了,因此,减小了进位产生的延迟时间。
074-王楠-计组实验三(超前进位加法器设计实验)
延安大学计算机学院实验报告专用纸
这个4 x 4阵列乘法器的原理如图1-3-1所示。
FA (全加器)的斜线方向为进位输出,竖线方向为和输出。
图中阵列的最后-行构.成了一个串行进位加法器。
由于FA一级是无需考虑进位的,它的进位被暂时保留下来不往前传递,因此同- -极中任意- -位FA加法器的进位输出与和输出几乎是同时形成的,与“串行移位”相比可大大减少同级间的进位传递延迟,所以送往最后一行串行加法器的输,入延迟仅与FA 的级数(行数)有关,即与乘数位数有关。
本实验用CPLD来设计一个4x4位加法器,且全部采用原理图方式实现。
【5】实验步骤
(1)根据上述阵列乘法器的原理,使用Quartus |I 软件编辑相应的电路原理图并进行编译,其在EPM1270 芯片中对应的引脚如图1-3-2所示,框外文字表示I/O号,框内文字表示该引脚的含义。
(2)关闭实验系统电源,按图1-3-3连接实验电路,图中将用户需要连接的信号用圆圈标明。
(3)实物图如下:
(4)打开实验系统电源,将生成的POF文件下载到EPM1270中去。
(5)以CON单元中的SD10...SD13四个二进制开关为乘数A,SD14.. SD17四个二进制开关为被乘数B,而相乘的结果在CPLD单元的L7...LO八个LED灯显示。
给A和B置不同的数,观察相乘的结果。
【6】实验结果
1、输入:1111 1111
结果:1111111
2、输入:0000 0000
结果:00000000。
4bits超前进位加法器
福州大学至诚学院数字集成电路课程设计报告设计题目:4bits 超前进位加法器全定制设计班级:(1)班专业:微电子学姓名:陈长毅学号:210991804组名:林志龙指导老师:王仁平教师评分:日期:4bits超前进位加法器目录第1章概述.................................................................... - 3 -1.1课程设计目的 (3)1.2课程设计的主要内容 (3)1.2.1设计题目 (3)1.2.2设计要求 ....................................................................1.2.3设计内容 (3)第2章功能分析及逻辑分析...................................................... - 4 -2.1功能分析 (4)2.2推荐工作条件 (4)2.3直流特性....................................................... 错误!未定义书签。
2.4交流(开关)特性 (5)2.5真值表 (6)2.6表达式 (7)2.7电路原理图 (7)2.7.1 4位超前进位加法器镜像实现的电路图2.7.2传输门实现XOR电路第3章功耗估算与延时......................................................... - 10 -3.1电容估算 (10)3.2功耗估算 (11)3.3延时估算 (11)第4章电路原理图设计与仿真................................................... - 12 -4.1原理图和符号图的建立 (12)4.1.1建立新库 (12)4.1.2建立SYMBOL (14)4.2各模块原理图设计与仿真4.2.1反相器的原理图与仿真 (13)4.2.2与门的原理图和仿真......................................... 错误!未定义书签。
超前进位加法器
超前进位加法器超前进位加法器是一种数字电路,用于执行两个二进制数的加法运算。
它具有高速、高效的特点,在计算机领域得到广泛的应用。
超前进位加法器的原理和实现方法值得深入研究和探讨。
本文将详细介绍超前进位加法器的原理、设计和性能优化等方面内容。
1. 引言在计算机科学和工程领域,加法运算是一项基本的操作。
随着计算机性能的要求不断提高,如何在更短的时间内完成加法运算成为了重要的研究方向。
超前进位加法器是一种对加法运算进行优化的方法,可以极大地提高运算速度和效率。
2. 超前进位加法器原理超前进位加法器是一种并行加法器,它利用了信号传输的延迟问题,通过将进位信号从低位传递到高位,实现了高速的运算。
其基本原理是,将两个二进制数按位相加,如果某一位的和等于2,就会产生一个进位信号,进位信号会传递到下一位,直到最高位。
3. 超前进位加法器的设计超前进位加法器的设计分为四个部分:1) 带有进位预测的半加器;2) 带有进位预测的全加器;3) 进位生成和进位传递逻辑电路;4) 加法器的结构和电路实现。
3.1 带有进位预测的半加器半加器是最基本的加法器,可以完成两个二进制位的加法运算,但不能处理进位信号。
为了实现进位预测,我们需要对半加器进行改进。
一种常见的方法是使用XOR门和AND门来实现进位预测功能。
具体的电路设计和逻辑表达式请查阅相关资料。
3.2 带有进位预测的全加器全加器是进一步改进的半加器,可以处理进位信号。
在超前进位加法器的设计中,我们使用带有进位预测的全加器。
全加器的设计和实现方法与半加器类似,但需要增加一个输入端来接收上一位的进位信号,并根据进位预测电路来生成进位信号。
3.3 进位生成和进位传递逻辑电路进位生成和进位传递逻辑电路是超前进位加法器的核心部分。
它们用于计算每一位的进位信号和传递进位信号到下一位。
进位生成电路可以通过AND门实现,进位传递电路可以通过OR 门实现。
具体的电路设计和实现方法请参考相关资料。
4位超前进位加法器设计讲解学习
4位超前进位加法器设计、、模拟集成电路分析与设计课程设计报告题目4位超前进位加法器设计学院(部)电控学院专业电子科学与技术班级学生姓名学号前言20世纪是IC迅速发展的时代。
计算机等信息产业的飞速发展推动了集成电路(Integrated Circuit—IC)产业。
大多数超大规模集成电路(Very Large Scale IC—VLSI)在日常生活中有着广泛的应用。
在这些广泛应用的运算中,加法器是组成这些运算的基本单元。
在高性能微处理器和DSP处理器中,加法器的运算时间至关重要。
加法器运算常常处于高性能处理器运算部件的关键路径中,特别是在算术逻辑单元中加法器的运算时间对处理器的速度起着决定性的作用。
随着微处理器的运算速度越来越快,对快速加法器的需求也越来越高。
当今,加法器的设计面临两大课题,首先是如何降低功耗。
随着便携式IC产品例如MP3播放器,手机和掌上电脑等的广泛使用,要求IC工程师对现有运算模块的性能作进一步改进,尤其是在电路的功耗和尺寸方面。
由于现在相应的电池技术难以和微电子技术的发展速度匹敌,这使得IC设计师遇到了许多限制因素,比如高速,大吞吐量,小尺寸,低功耗等。
因此,这使得研究低功耗高性能加法单元持续升温。
另一方面就是如何提高加法器的运算速度。
因为加法运算存在进位问题,使得某一位计算结果的得出和所有低于它的位相关。
因此,为了减少进位传输所耗的时间,提高计算速度,人们设计了多种类型的加法器,如超前进位加法器曼彻斯特加法器、进位旁路加法器、进位选择加法器等。
它们都是利用各位之间的状态来预先产生高位的进位信号,从而减少进位从低位向高位传递的时间。
本文首先介绍了的加法器的类型以及其工作原理,然后重点分析了超前进位加法器的组成结构、结构参数以及其工作原理。
分层设计了加法器的输入输出电路,并通过tanner软件进行仿真实验,从而验证了电路的准确信。
目录第二章设计过程 (18)2.1 电路设计基础原理 (18)2.2 电路各部分结构设计 (20)异或门的CMOS电路原理图如下: (21) (21)异或门的CMOS波形图如下: (21) (21)两输入与门的CMOS电路原理图如下: (22) (22)两输入与门的CMOS波形如下: (22) (22)反相器的CMOS电路如下: (23) (23)反相器的CMOS仿真波形如下: (23) (23)四位超前进位加法器进位的逻辑电路图如下: (24) (24)c1,c2,c3,c4的CMOS级电路原理图及仿真 (25) (25)a.c1的原理图 (25) (25)c1的仿真波形 (26) (26)b.c2的原理图 (26)c2的仿真波形 (27)c.c3的原理图 (28) (29)c3的仿真波形 (29) (30)c4的原理图 (30)c3的仿真波形 (31)2.3 主要电路参数的手工推导 (31)四位超前进位加法器门级电路原理图如下: (34) (34)四位超前进位加法器门级电路分析设定如下: (34) (35)四位超前进位加法器门级电路瞬态分析结果如下: (35) (35)四位超前进位加法器门级电路瞬态分析波形图如下: (35) (36)4.1 用于仿真的电路图如下: (37)四位超前进位加法器门级电路分析设定如下: (38)四位超前进位加法器电路瞬态分析结果如下: (38) (38)四位超前进位加法器门级电路瞬态分析波形图如下: (38) (39)第五章鸣谢及课设总结和体会 (39)参考文献 (40)第一章设计目标1.根据电路原理图,给出电路的CMOS晶体管级电路设计。
杭电计组实验2-超前进位加法器设计实验
杭州电子科技大学计算机学院
实验报告
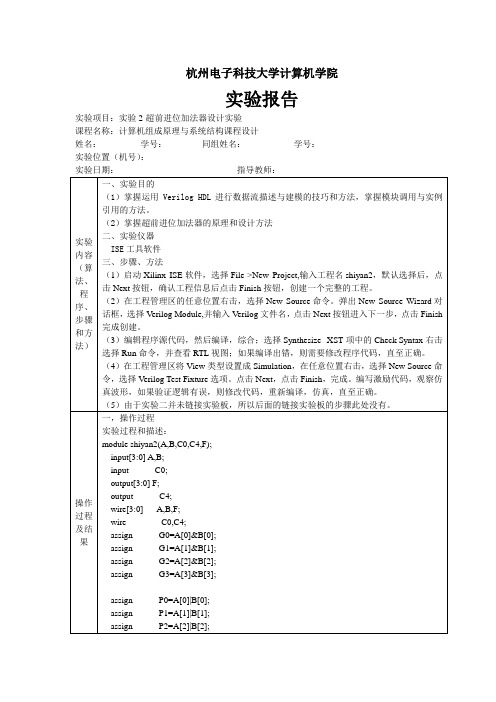
实验项目:实验2-超前进位加法器设计实验
课程名称:计算机组成原理与系统结构课程设计
姓名:学号:同组姓名:学号:
实验位置(机号):
实验日期:指导教师:
#100;
A = 1011;
B = 1101;C0 = 0;
#100;
A = 1010;
B = 0010;C0 = 1;
#100;
A = 0111;
B = 1000;C0= 0;
#100;
A = 0011;
B = 0100;C0 = 1;
#100;
A = 1001;
B = 0001;C0 = 0;
#100;
end
Endmodule
RTL图
二、结果
思考题:
(1)综合得到的电路图,它和想要设计的电路在引脚的输入输出方面是完全相同的,但是相比较内部的RTL图,实验实现的结果是相同的,但是我编写的实验代码并没有调用实验一的全加器设计。
(2)尝试编写8位超前进位加法器设计实验
module add_8 ( input [7:0]a, input [7:0]b, input cin, output [7:0] s, output co );
wire [7:0]c_tmp;
wire [7:0]g;
wire [7:0]p;。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
沈阳航空航天大学课程设计报告课程设计名称:计算机组成原理课程设计课程设计题目:超前进位加法器的设计院(系):计算机学院专业:计算机科学与技术班级:学号:姓名:指导教师:完成日期:2014年01月10日沈阳航空航天大学课程设计报告目录第1章总体设计方案 (2)1.1设计原理 (2)1.2设计思路 (3)1.3设计环境 (3)第2章详细设计方案 (4)2.1顶层方案图的设计与实现 (4)2.1.1顶层方案的整体设计 (4)2.1.2元器件选择和引脚锁定 (5)2.2功能模块的设计与实现 (6)2.2.1 八位超前进位加法器的设计与实现 (6)2.3功能仿真调试 (8)第3章编程下载与硬件测试 (10)3.1编程下载 (10)3.2硬件测试及结果分析 (10)参考文献 (12)附录 (13)第1章总体设计方案1.1 设计原理将n个全加器相连可得n位加法器,但是加法时间较长。
解决的方法之一是采用“超前进位产生电路”来同时形成各位进位,从而实现快速加法。
超前进位产生电路是根据各位进位的形成条件来实现的。
四位超前进位加法器的设计:①只要满足下述两个条件中的任一个,就可形成C1,(1)X1,Y1均为1;(2)X1,Y1任一个为1,且进位C0为1。
由此,可以得到C1的表达式为:C1=X1*Y1+(X1+Y1)*C0;②只要满足下述条件中任一个即可形成C2,(1)X2,Y2均为1;(2)X2,Y2任一为1,且X1,Y1均为1;(3)X2,Y2任一为1,同时X1,Y1任一为1,且C0为1。
由此,可以得到C2的表达式为:C2=X2*Y2+(X2+Y2)*X1*Y1+(X2+Y2)*(X1+Y1)*C0;③同理,有C3,C4表达式如下:C3=X3*Y3+(X3+Y3)*X2*Y2+(X3+Y3)*(X2+Y2)*X1*Y1+(X3+Y3)*(X2+Y2)*(X1+Y1)*C0;C4=X4*Y4+(X4+Y4)*X3*Y3+(X4+Y4)*(X3+Y3)*X2*Y2+(X4+Y4)*(X3+Y3)*(X2+Y2)*X1*Y1+(X4+Y4)*(X3+Y3)*(X2+Y2)*(X1+Y1)*C0。
引入进位传递函数Pi和进位产生函数Gi。
它们的定义为:Pi=Xi+YiGi=Xi*YiP1的意义是:当X1,Y1中有一个为1时,若有进位输入,则本位向高位传送此进位,这个进位可以看成是低位进位越过本位直接向高位传递的。
G1的意义是:当X1,Y1均为1时,不管有无进位输入,本位定会产生向高位的进位。
将Pi、Gi代入C1到C4式子中,便可得到:C1=G1+P1*C0;式(1.1.1)C2=G2+P2*G1+P2*P1*C0;式(1.1.2)C3=G3+P3*G2+P3*P2*G1+P3*P2*P1*C0;式(1.1.3)C4=G4+P4*G3+P4*P3*G2+P4*P3*P2*G1+P4*P3*P2*P1*C0;式(1.1.4)1.2 设计思路八位超前进位加法器的设计:一个八位超前进位加法器,它可以由2个四位超前进位加法器模块来构成。
四位超前进位加法器采用Schematic设计输入方式,顶层的八位超前进位加法器采用原理图设计输入方式。
在四位超前进位加法器的设计中,运用门电路进行控制,并且给上述设计进行定位,所设计的Schematic程序电路经过编译、检测、调试过后生成.bit文件并且下载到XCV200可编程逻辑芯片中,经过COP2000测试并验证设计的正确性。
1.3设计环境在设计超前进位加法器过程中,采用Xilinx Foundation F3.1可编程器件开发软件,对于硬件,在实验设计过程中,用到了伟福COP2000型计算机组成原理实验仪、XCV200实验板、微机。
第2章详细设计方案2.1 顶层方案图的设计与实现顶层方案图主要实现一位全加器的逻辑功能,采用原理图设计输入方式完成,超前进位加法器电路的是实现基于XCV200可编程逻辑芯片。
在完成原理图的功能设计后,经过检测调试,把输入/输出信号通过引脚编号安排到XCV200指定的引脚上去,最终实现芯片的引脚锁定。
2.1.1顶层方案的整体设计顶层图形文件主要由2个四位超前进位加法器构成,总共17位输入,9位输出。
顶层图形文件由Xilinx Foundation F3.1软件编辑得到相应的模块,顶层图形的整体设计如下图2.1所示:图 2.1八位超前进位加法器整体设计图2.1.2元器件选择和引脚锁定(1)元器件的选择由于在设计的过程中,硬件设计环境是基于伟福COP2000型计算机组成原理实验仪和XCV200实验板,故采用的目标芯片为Xilinx XCV200可编程逻辑芯片。
(2)引脚锁定在Xilinx Foundation F3.1上面完成软件的设计之后,把顶层图形文件中的输入/输出信号用引脚编号安排到Xilinx XCV200芯片指定的引脚上去,从而实现芯片的设计电路的引脚锁定,各信号及Xilinx XCV200芯片引脚对应关系如下表2.1所示:表 2.1 信号和芯片引脚对应关输入信号XCV200芯片引脚输出信号XCV200芯片引脚U1 A1 94 U1 S1 147U1 A2 95 U1 S2 152U1 A3 96 U1 S3 178U1 A4 97 U1 S4 184U2 A1 100 U2 S1 185U2 A2 101 U2 S2 203U2 A3 102 U2 S3 111U2 A4 103 U2 S4 110U1 B1 79 U2 C4 78U1 B2 80U1 B3 81U1 B4 82U2 B1 84U2 B2 85U2 B3 86U2 B4 87U1 C0 632.2 功能模块的设计与实现在八位超前进位加法器和四位超前进位加法器的设计中均是采用Schematic 设计输入方式,而在四位超前进位加法器的设计中是由一列的门电路构成,最后在由2个四位超前进位加法器模块构成8位超前进位加法器。
可以扩展开来,16位,32位超前进位加法器原理类似8位的设计原理。
2.2.1 八位超前进位加法器的设计与实现(1)设计描述根据上面在1.1中讲述的四位超前进位加法器的设计原理那样,四位超前进位加法器的实现是建立在进位C1,C2,C3,C4的基础之上的。
所以,由于上面第1.1节中关于进位C1,C2,C3,C4已经进位讲述,根据式(1.1.1),式(1.1.2),式(1.1.3)式(1.1.4)可以画出四位超前进位加法器的逻辑图。
四位超前进位加法器的9个输入端分别为:A1,A2,A3,A4,B1,B2,B3,B4,C0;5个输出端分别为:S1,S2,S3,S4,C4;其高低位顺序是从低到高,A1到A4,B1到B4,S1到S4,C0,C4是进位。
经过门电路的组合之后形成,四位超前进位加法器(Schematic程序),在经过封装,可以得到一个比较简洁的元器件,然后可以自己命名。
(2 )创建Schematic程序的电路图四位超前进位加法器的完整电路设计图如下图2.2所示:左面为输入端口,右面5个为输出端口。
图 2.2八位超前进位加法器的设计电路图如下图2.3所示:图2.32.3 功能仿真调试对所创建的电路图进行功能仿真,以便检测其正确性,可以采用Xilinx编译器中的Simulator模块实现。
如下图2.4所示:其中U1 C0为0,U1的A4A3A2A1为1111,B4B3B2B1为0000,U2的A4A3A2A1为1111,B4B3B2B1为0000,最后运算的结果为,U1的S4S3S2S1为1111,C4为0,U2的S4S3S2S1为1111,C4为0。
图 2.4仿真图说明:前面的9位依次是U1的C0,A1到A4,B1到B4,进位C4输出S1到S4,其余的是U2的输入输出,内容与U1相同。
为了验证其正确性,重新输入实验数据,再次进行检测。
如下图2.5所示:其中U1的A4A3A2A1为1111,B4B3B2B1为0001,C0为0,计算结果S4S3S2S1为0000,C4为1;U2的A4A3A2A1为1111,B4B3B2B1为0000,计算结果S4S3S2S1为0000,C4为1.图 2.5经过以上这两次的检测,对于所设计的八位超前进位加法器电路图是完全正确的,计算结果是正确的,符合设计要求。
第3章编程下载与硬件测试3.1 编程下载在设计完程序电路,经过检测没有错误之后,就可以利用COP2000仿真软件的编程下载功能,将得到111.bit文件下载到XCV200实验板的XCV200可编程逻辑芯片中。
如果不能正确下载,需要重新连接电路图,然后重新进行检测,知道能够下载为止。
3.2 硬件测试及结果分析利用XCV200实验板进行硬件功能测试。
八位超前进位加法器的输入数据通过XCV200实验板的输入开关实现,输出数据通过XCV200实验板的LED指示灯实现,其对应关系如表3.1所示。
表3.1 XCV200实验板信号对应关系XCV200芯片引脚信号XCV200实验板A1~A4(U1) A1~A4(U2) K0B1~B4(U1) B1~B4(U2) K1C0(U1) K2:0S1~S4(U1) S1~S4(U2) A0~A7C4(U2) B0表3.1中的输入参数作为输入数据,逐个测试输出结果,即用XCV200实验板的开关控制相应的输入数据,同时观察红灯和绿灯的亮灭,如果灯亮,说明输出1,灯灭则输出0。
具体操作结果如下图3.1。
图3.1硬件测试说明:A加数输入11111100,B加数输入11000000,C0输入0,相加结果为110111100,即C4为1,输出结果为10111100,与上图3.1现象相符,结果正确。
参考文献[1] 李景华.可编程程逻辑器件与EDA技术[M].北京:东北大学出版社,2001[2] 范延滨.微型计算机系统原理、接口与EDA设计技术[M].北京:北京邮电大学出版社,2006[3] 王爱英.计算机组成与结构(第4版)[M].北京:清华大学出版社,2006[4] 王冠.Verilog HDL与数字电路设计[M].北京:机械工业出版社,2005[5] 江国强.EAD技术习题与实验[M].北京:电子工业出版社,2005[6] 杜建国.Verilog HDL硬件描述语言[M].北京:国防工业出版社,2004[7] 王爱英.计算机组成与结构[M].北京:清华大学出版社,2007[8] 唐朔飞.计算机组成原理[M]北京:高等教育出版社,2008附录八位超前进位加法器的完整设计图:四位超前进位加法器的设计电路图:四位超前进位加法器的内部设计电路图:课程设计总结:在这次的课程设计中,我学到了很多。
第一次用Xilinx Foundation F3.1,很多东西都不懂,不断地去请教同学,同时自己也不断地去尝试,总算是慢慢的知道了该如何去建工程,如何去定义一个新的芯片以及内部逻辑结构。