数字调制解调技术中英文资料外文翻译文献
外文翻译---6 数字数据传输:接口和调制解调器

英文资料及中文翻译6 TRANSMISSIONS OF DIGITAL DATA:INTERFACES AND MODEMS(From Introduction to Data Communications and Net Working,Behrouz Forouzan)Once we have encoder our information into a format that can be transmitted, the next step is to investigate the transmission process itself. Information-processing equipment such as PCs generate encoded signals but ordinarily require assistance to transmit those signals over a communication link. For example, a PC generates a digital signal but needs an additional device to modulate a carrier frequency before it is sent over a telephone line. How do we relay encoded data from the generating device to the next device in the process? The answer is a bundle of wires, a sort of mini communication link, called an interface.Because an interface links two devices not necessarily made by the same manufacturer, its characteristics must be defined and standards must be established. Characteristics of an interface include its mechanical specifications (how many wires are used to transport the signal); its electrical specifications (the frequency, amplitude, and phase of the expected signal); and its functional specifications (if multiple wires are used, what does each one do?). These characteristics are all described by several popular standards and are incorporated in the physical layer of the OSI model.6.1 DIGITAL DATA TRANSMISSIONOf primary concern when considering the transmission of data from one device to another is the wiring. And of primary concern when considering the wiring is the data stream. Do we send one bit at a time, or do we group bits into larger groups and, if so, how? The transmission of binary data across a link can be accomplished either in parallel mode or serial mode. In parallel mode, multiple bits are sent with each clock pulse. In serial mode, one bit is sent with each clock pulse. While there is only one way to send parallel data, there are two subclasses of serial transmission: synchronous and asynchronous (see Figure 6-1).Parallel TransmissionBinary data, consisting of 1s and 0s, may be organized into groups of n bits each. Computers produce and consume data in groups of bits much as we conceive of and use spoken language in the form of words rather than letters. By grouping, we cansend data n bits at a time instead of one. This is called parallel transmission.The mechanism for parallel transmissionis a conceptually simple one: use n wires to send n bits at one time. That way each bit has its own wire, and all n bits of one group can be transmitted with each clock pulse from one device to another. Figure 6-2 shows how parallel transmission works for n=8.Typically the eight wires are bundled in a cable with a connector at each end.Figure 6-2 Parallel transmissionThe advantage of parallel transmission is speed. All else being equal, parallel transmission can increase the transfer speed by a factor of n over serial transmission. But there is a significant disadvantage:cost. Parallel transmission requires n communication lines (wires in the example) just to transmit the data stream. Because this is expensive, parallel transmission is usually limited to short distances, up to a maximum of say 25 feet.Serial TransmissionIn serial transmission one bit follows another, so we need only one communication channel rather than n to transmit data between two communicating devices .The advantage of serial over parallel transmission is that with only one communication channel, serial transmission reduces the cost of transmission over parallel by roughly a factor of n.Since communication within devices is parallel, conversion devices are required at the interface between the sender and the line (parallel-to-parallel).Serial transmission occurs in one of two ways: asynchronous or synchronous. Asynchronous TransmissionAsynchronous transmission is so named because the timing of a signal is unimportant. Instead, information is received and translated by agreed-upon patterns. As long as those patterns are followed, the receiving device can retrieve the information without regard to the rhythm in which it is sent. Patterns are based on grouping the bit stream into bytes. Each group, usually eight bits, is sent along the link as a unit. The sending system handles each group independently, relaying it to the link whenever ready, without regard to a timer.Without a synchronizing pulse, the receiver cannot use timing to predict when the next group will arrive. To alert the receiver to the arrival of a new group, therefore, an extra bit is added to the beginning of each byte. This bit, usually a 0, is called the start bit. To let the receiver know that the byte is finished, one or more additional bits are appended to the end of the byte. These bits, usually 1s, are called stop bits. By this method, each byte is increased in size to at least 10 bits, of which 8 are information and 2 or more are signals to the receiver. In addition, the transmission of each byte may then be followed by a gap of varying duration. This gap can be represented either by an idle channel or by a stream of additional stop bits.In asynchronous transmission we send one start bit (0) at the beginning and one or more stop bits (1s) at the end of each byte. There may be a gap between each byte.The start and stop bits and the gap alert the receiver to the beginning and end of each byte and allow it to synchronize with the data stream. This mechanism is called asynchronous because, at the byte level, sender and receiver do not have to be synchronized. But within each byte, the receiver must still be synchronized with the incoming bit stream. This is, some synchronization is required, but only for the duration of a single byte. The receiving device resynchronizes at the onset of each new byte. When the receiver detects a start bit, it sets a timer and begins counting bits as they come in. after n bits the receiver looks for a stop bit. As soon as it detects the stop bit, it ignores any received pulses until it detects the next start bit.Asynchronou s here means “asynchronous at the byte level,” but the bits are still synchronized; their durations are the same.The addition of stop and start bits and the insertion of gaps into the bit stream make asynchronous transmission slower than forms of transmission that can operate without the addition of control information. But it is cheap and effective, two advantages that make it an attractive choice for situations like low-speed communication. For example, the connection of a terminal to a computer is a natural application for asynchronous transmission. A user types only one character at a time, types extremely slowly in data processing terms, and leaves unpredictable gaps of time between each character.Synchronous TransmissionIn synchronous transmission, the bit stream is combined into longer “frames,” which may contain multiple bytes. Each byte, however, is introduced onto the transmission link without a gap between it and the next one. It is left to the receiver to separate the bit stream into bytes for decoding purposes. In other words, data are transmitted as an unbroken string of 1s and 0s, and the receiver separates that string into the bytes, or characters, it needs to reconstruct the information.In synchronous transmission we send bits one after another without start/stop bits or gaps. It is the responsibility of the receiver to group the bits.Without gaps and start/stop bits, there is no built-in mechanism to help the receiving device adjust its bit synchronization in midstream. Timing becomes very important, therefore, because the accuracy of the received information is completely dependent on the ability of the receiving device to keep an accurate count of the bits as they come in.The advantage of synchronous transmission is speed. With no extra bits or gaps to introduce at the sending end and remove at the receiving end and, by extension, with fewer bits to move across the link, synchronous transmission is faster than asynchronous transmission is faster than asynchronous transmission. For this reason, it is more useful for high-speed applications like the transmission of data from one computer to another. Byte synchronization is accomplished in the data link layer.6.2 DTE-DCE INTERFACAt this point we must clarify two terms important to computer networking: data terminal equipment (DTE). There are usually four basic functional units involved in the communication of data: a DTE and DCE on one end and a DCE and DTE on theother end. The DTE generates the data and passes them, along with any necessary control characters, to a DCE. The DCE does the job of converting the signal to a format appropriate to the transmission medium and introducing it onto the network link. When the signal arrives at the receiving end, this process is reversed.Data Terminal Equipment (DTE)Data terminal equipment (DTE) includes any unit that functions either as a source of or as a destination for binary digital data. At the physical layer, if can be a terminal, microcomputer, computer, printer, fax machine, or any other device that generates or consumes digital data. DTEs do not often communicate directly with one another, they generate and consume information but need an intermediary to be able to communicate. Think of a DTE as operating the way your brain does when you talk. Let’s say you have an idea that you want to communicate to a friend. Your brain creates the idea but cannot transmit that idea to your friend’s brain by itself. Unfortunately or fortunately, we are not a species of mind readers. Instead, your brain passes the idea to your vocal chords and mouth, which convert it to sound waves that can travel through the air or over a telephone line to your friend’s ear and from there to his or her brain, where it is converted back into information. In this model, your brain and your friend’s brain are DTEs. Your vocal chords and mouth are your DCE. His or her ear is also a DCE. The air or telephone wire is your transmission medium.A DTE is any device that is a source of or destination for binary digital data. Data Circuit-Terminating Equipment (DCE)Data circuit-terminating equipment (DCE) includes any functional unit that transmits or receives data in the form of an analog or digital signal through a network. At the physical layer, a DCE takes data generated by a DTE, converts them to an appropriate signal, and then introduces the signal onto the telecommunication link. Commonly used DCEs at this layer include modems . In any network, a DTE generates digital data and passes it to a DCE; the DCE converts the data to a form acceptable to the transmission medium and sends the converted signal to another DCE on the network. The second DCE takes the signal off the line, converts it to a form usable by its DTE, and delivers it. To make this communication possible, both the sending and receiving DCEs must use the same encoding method, much the way that if you want to communicate to someone who understands only Japanese, you must speak Japanese. The two DTEs do not need to be coordinated with each other, but each of them must be coordinated with its own DCE and the DCEs must becoordinated so that data translation occurs without loss of integrity.A DCE is any device that transmits or receives data in the form of an analog or digital signal through a network.6 数字数据传输:接口和调制解调器(选自«数据通信与网络», Behrouz Forouzan著)我们将信息编码成可以传输的格式,下一步就是探讨传输过程了。
单片机外文文献翻译--基于MSP430的FSK调制解调
中文翻译材料英文题目FSK Modulation and Demodulation With the MSP430 Microcotroller中文题目基于MSP430的FSK调制解调学院:计算机科学与技术学院专业:通信工程学生姓名:指导教师:二O一三年六月IMPORTANT NOTICETexas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinueany product or service without notice, and advise customers to obtain the latest version of relevant informationto verify, before placing orders, that information being relied on is current and complete. All products are sold subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those pertaining to warranty, patent infringement, and limitation of liability.TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extentTI deems necessary to support this warranty. Specific testing of all parameters of each device is not necessarily performed, except those mandated by government requirements.CERTAIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF DEATH, PERSONAL INJURY, OR SEVERE PR OPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER CRITICAL APPLICATIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICATIONS IS UNDERSTOOD TO BE FULLY AT THE CUSTOMER’S RISK.In order to minimize risks associated with the customer’s applications, adequate design and operatingsafeguards must be provided by the customer to minimize inherent or procedural hazards.TI assumes no liability for applications assistance or customer product design. TI does not warrant or representthat any license, either express or implied, is granted under any patent right, copyright, mask work right, or other intellectual property right of TI covering or relating to any combination, machine, or process in which such semiconductor products or services might be or are used. TI’s publication of information regarding any thirdparty’s products or services does not constitute TI’s approval, warranty or endorsement thereof.Copyright 1998, Texas Instruments IncorporatedContents1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (1)2 Demodulation Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.1 Choosing the Sampling Rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.2 Front End Processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.3 FSK Demodulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.4 Bit Synchronization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3 Modulation Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.1 Choosing the Sampling Rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.2 Constructing the Look Up Table . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .3.3 FSK Modulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2 2 2 2 3 4 4 4 44 Data Conversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (5)4.1 A/D Conversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (5)4.2 D/A Conversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (5)5 Power Consumption . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (6)6 Exercising the Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (7)6.1 FSK Receiver . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (7)6.2 FSK Transmitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (7)7 Example Circuits . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (8)7.1 Using the MSP430C325 as Main Processor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (8)7.2 Example Telephone Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (8)8 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (10)9 References . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . (11)FSK Modulation and Demodulation With the MSP430 MicrocontrolleriFSK Modulation and Demodulation With the MSP430MicrocontrollerABSTRACTThis application report describes a software program for performing V.23 FSK modemtransceiver functions using an MSP430 microcontroller. It makes use of novel filterarchitecture to perform DSP functions on a processor with only shift and add capabilities.1 IntroductionMany measurement applications (for example, electric and gas meters) requirea way to communicate electronically with a central office so that measured datacan be reported back to the central office and new tariffs can be set in the remotesite. Telephony provides a convenient means of data communication.Frequency shift keying (FSK) and dual tone multi frequency (DTMF) are twopopular methods of representing binary data over telephone circuits. Thisapplication report describes a V.23-compliant FSK transceiver software module.Integrating the measurement and communication functions onto the same chipyields cost as well as power-saving benefits. Using the MSP430, a high MIPs ultralow power microprocessor, allows power to be drawn from the telephone line insome cases.This report describes the mathematical formulas for FSK signal transmission anddetection. A list of the software modules is included with a reference schematicfor telephone interface and low cost A/D converter. The schematic is only areference, since the precise implementation can vary from country to country.1Demodulation Theory2 Demodulation TheoryA quadrature demodulator provides the FSK demodulation. In this type ofdemodulation, the signal and its delayed version are multiplied together and then low-pass filtered. If the delay, T, is set such that Wcarrier ⋅ T = /2, then thelow-pass filter result is proportional to the frequency deviation from the carrier and therefore represents the bit value sent.If wWcarrierwhere w = 2π ⋅ f : + " Wdelta and T+ Wcarrier +p 2 ³2.1 cos[wt].cos[w(t –T)]coswT coswTsin[" Wdelta] + ) cos(2wt –wT) ³ Low Pass Filter +" sin[Wdelta]_ Choosing the Sampling RateThe sampling is chosen to be Fcarrier4 for the purpose of obtaining thedelayed sample without computational overhead. For V.23, the F carrierfrequency is 1700 Hz and therefore the sampling rate becomes 6800 Hz. Using a 32768-Hz crystal yields 6793.3 Hz, which is 0.1% out. The sampling frequency is set by the 8-bit interval timer. Because this timer is limited to 256 counts, the interrupt rated is set to twice the sampling rate and the processing is divided into two halves with signal sampling performed every other interrupt.2.2 Front End ProcessingMost A/D converters, including the successive approximation A/D converter in the MSP430C325, need a dc bias; this yields an unsigned integer sample with an offset. Before this sample can be processed further, it needs to go through an unbias filter to take out the dc bias and turn the sample into a signed integer value. This unbias filtering also gives 30 dB or so of rejection for main frequencies.2.3 FSK DemodulationThe signed integer sample and its delayed version are multiplied together; in this application, an 8×8 signed multiplication loop is used.The product, made up of two frequency elements, is low-pass filtered to remove the double frequency element. The remainder is a signed integer valuerepresenting the original bit value transmitted.The low-pass filter uses the digital wave filtering technique. This technique gives stable characteristics with very good coefficient tolerance. All multiplication is done through shifts and adds with the number of shift/add operations minimized through rounding off the coefficients. Because the filter has good coefficienttolerance, this rounding off does not affect the filter performance. The Butterworth filter used here gives approximately 40-dB attenuation in the stop band with 1-dB pass and ripple.2SLAA037Demodulation Theory2.4Bit SynchronizationThe bit values coming out from demodulation need to be determined andsynchronized to produce the incoming data bit stream. This process is alsoknown as bit slicing and clock recovery. Because the sampling rate at 6800 is notan integer multiple of the data rate (baud rate) at 1200, an additional step isneeded to consolidate between the two rates. This is done through a count-downcounter with a sequence of preload value (5,6,5). Every 17 samples, the samplingrate and the data baud rate are resynchronized. Bit synchronization or clockrecovery is done by monitoring bit value transitions. Lead or lag information isthen obtained and the count-down counter is adjusted accordingly. Because ofthe difference between the sampling clock and the data clock, the data bit is neversampled at the middle of the baud period; instead a –5% to 13% variation isintroduced. However, this should not have any adverse effect on the accuracy ofthe system, as it has been verified experimentally.3FSK Modulation and Demodulation With the MSP430 MicrocontrollerModulation Theory3 Modulation TheoryFSK modulation involves alternating the value of a delta frequency from a carrierfrequency according to the value of the bit to be represented. For V.23, a bit valueof 0 = 400 Hz and a bit value of 1 = –400 Hz.FSK signal + Amplitudecos[t| 2p(Fcarrier" Fdelta)]The sinusoidal signal is generated through a lookup table which contains cosine values from 0 to 2π. A parameter called PHASER (16 bit) represents the current angle: 0=0 degree, 8000 hex = 180 degree 10000 hex = 360 degree. With each sample, this angle is advanced by another parameter DELTA (16 bit) which determines the frequency of the signal (larger DELTA value = higher frequency). Frequency modulation is realized by changing the DELTA value according to the bit value to be transmitted at each baud period, according to the following formula:DELTA + Fdesired Fsampling65536.The advantage of this method over a digital oscillator method is that this methodpreserves the phase relationship even when the frequency is shifted from sampleto sample.3.1Choosing the Sampling RateThe 8-bit interval timer sets the sampling rate to 19200 samples/s. This rate issubdividable into the data baud rate of 1200. Also, it is sufficiently high to makethe D/A process simpler.3.2Constructing the Look Up TableTo save ROM space, only the first quadrant (0 to 127 degrees) in Q7 format iscoded. This is done by dividing the first quadrant (90 degrees) into 128 steps ofapproximately 0.7 degrees each. The remaining three quadrants can be workedout from this first quadrant table using additional computation.3.3FSK ModulationThe parameter PHASER is advanced by the amount DELTA at every interrupt.The first 9 bits of the PHASER is used to look up the cosine value. For the cosinefunction, the third and fourth quadrant are the same as the second and firstquadrant, and so only the absolute value of the first 9 bits of PHASER is used.Next, all second quadrant values are derived from the first quadrant ROM table.The 8-bit result value is stored onto P0.OUT.Every 16 interrupts, the parameter DELTA is updated with the next frequency bylooking at the next bit to be transmitted.4SLAA037Data Conversion 4 Data ConversionThis section describes the required digital-to-analog (D/A) and analog-to-digital(A/D) data conversions.4.1A/D ConversionThe most straightforward way to digitize the incoming FSK signal is to use the12-bit mode of the internal 14-bit A/D converter of the MSP430C325. However,not all of the 12 bits are needed to achieve good dynamic range for the FSKdemodulation. Simulation results indicate that an 8-bit A/D stage gives gooddynamic range up to 25 dB using internal AGC software. With an additionalexternal AGC stage, the dynamic range can be further widened. As economicalmeans of building 8-bit single slope A/D exists, this extends the application of thismodule to the rest of the MSP430 family. The application software included hereuses a single slope A/D (universal timer with external comparator) for thedemodulator. This makes the software universally applicable for the whole family.4.2D/A ConversionA 6-bit external R–2R ladder is used to construct the D/A converter. Because thecarrier frequency of 19200 Hz is nine times the highest frequency of the FSK of2100 Hz, the post filtering stage should be relatively simple. In the applicationcircuit, a single capacitor forms a single pole low pass filter but more poles canbe realized using additional passive networks.5FSK Modulation and Demodulation With the MSP430 MicrocontrollerPower Consumption5 Power ConsumptionThe FSK concept is designed with low power in mind. The FSK demodulatortakes less than 2 MIPs. With a low power op-amp as a front-end, total powerconsumption of less that 1.5 mA should be achievable. Thus, it is possible thatthe power can be derived entirely from the telephone line. A schematic is includedfor a suggested telephone line interface. The precise configuration may vary fromcountry to country.SLAA0376Exercising the Software 6 Exercising the SoftwareThis section describes operation of the software.6.1FSK ReceiverThe FSK signal is derived from the telecom interface circuit. This signal shouldhave a dc bias of 1.2 V and a peak-to-peak level of 400 mV. The software decodesthis FSK signal and produces three outputs which lets the user monitor thedemodulated data.TP.3. This is the clock signal recovered from the input FSK.TP.5. This is the data recovered from the input FSK; data is latched out everyrising edge of TP.3.P0.2–P0.7. These six bits output the low pass filtered result. With an externalR–2R ladder this becomes very useful in monitoring the analogue FSKdemodulator output level. It is hard limited to 8 bits with the MSB 6 bits loadedto port P06.2FSK TransmitterThe transmitter software outputs an FSK signal according to the BIT MAP datadefined in TX_DATA_TABLE. The bitmap pattern starts with a preamble followedby a long MARK period. Then the actual data is transmitted. This table uses a zeroword as an end marker, and the software restarts the whole data sequence uponreaching a zero value in the bit map data.7FSK Modulation and Demodulation With the MSP430 MicrocontrollerExample Circuits7 Example CircuitsThis section shows and describes example circuits.7.1Using the MSP430C325 as Main ProcessorFigure 1 shows an example circuit using the MSP430C325 as the mainprocessor. The circuit is tested with 400 mV peak-to-peak FSK input. To obtainthe same results, Rx needs to be biased at 1.2 V with a 400 mV peak-to-peak FSKsignal superimposed.VSSR1 R2PO.2PO.3PO.4PO.5PO.6PO.7MSP430E325TP.5TP.1 TP.4 CIN TP.3RX_CLKLine InterfaceRXTXHook 14066AC13VCC1N414833 kΩVoltage RampPNPSample_HoldNPN 1 nF 6_ 5+B 2RX_DATA7Figure 1. Main Processor and A/D Converter7.2Example Telephone InterfaceFigure 2 shows an example telephone interface, and Table 1 lists FSK transceiverperformance data.8SLAA037Example Circuits 20 kΩ1 ∝Φ+ 1 kΩ1 kΩVREF(1.5 V)TLC22796_5+33 kΩ20 kΩ20 kΩ20 kΩ10 kΩ9_10+Telephone LineAB33 nF500 &6–8 V ZenersTuning ForMinimum Side Tone6–8 V ZenersTX7DC TelephoneIsolationTransformer8150 kΩ400 mV pk–pkRX 1 ∝Φ+–+131233 kΩ33 kΩ680Hook150 kΩ14This is a reference circuit only and may not be applicable under some circumstances.Figure 2. Telephone InterfaceTable 1. FSK Transceiver PerformanceRAM (BYTES)FSK Receiver FSK Transmitter1812ROM (BYTES)512400MIPS (APPROX.)21.4FSK Modulation and Demodulation With the MSP430 Microcontroller9Summary8 SummaryFSK transceivers are normally realized by either analog means or by the use ofDSPs with hardware MAC units. Using an MSP430 RISC processor without ahardware MAC to achieve the transceiver function is a very unusual approach.The ability to create filters using digital wave filtering techniques, together with theorthogonal instruction set and the 16 bit architecture of the MSP430, makes thecode very ROM and MIPs efficient. Moreover, the ultra low power capability of theMSP430 means that power can readily be derived from the phone line. This leadsto component-efficient designs. The author has conducted other tests toconclude that, with some enhancements, the FSK receiver can work with an 8-bitA/D converter with enough sensitivity. Therefore the FSK transceiver can beimplemented economically across the whole MSP430 family.SLAA03710References9 References1. Texas Instruments: MSP430 Family, Architecture User’s Guide and ModuleLibrary.2. Texas Instruments Digital Signal Processing Application with the TMS320Family Volume 2.3. Gaszi, L: Explicit Formulas for Lattice Wave Digital Filters; IEEE Trans. OnCircuits and Systems VOL. CAS-32, NO. 1, January 198511FSK Modulation and Demodulation With the MSP430 Microcontroller基于MSP430的FSK调制解调——应用报告声明德州仪器(TI)及其附属公司(TI)保留改进产品或停止任何服务的权力,并且不再另行通知,建议客户获核实最新版本或相关信息,在下订单前,该信息是当前最有效和完整的。
数字无线通信系统中的调制(英文)
AgilentDigital Modulation in Communications Systems—An IntroductionApplication Note 1298This application note introduces the concepts of digital modulation used in many communications systems today. Emphasis is placed on explaining the tradeoffs that are made to optimize efficiencies in system design.Most communications systems fall into one of three categories: bandwidth efficient, power efficient, or cost efficient. Bandwidth efficiency describes the ability of a modulation scheme to accommodate data within a limited bandwidth. Power efficiency describes the ability of the system to reliably send information at the lowest practical power level.In most systems, there is a high priority on band-width efficiency. The parameter to be optimized depends on the demands of the particular system, as can be seen in the following two examples.For designers of digital terrestrial microwave radios, their highest priority is good bandwidth efficiency with low bit-error-rate. They have plenty of power available and are not concerned with power efficiency. They are not especially con-cerned with receiver cost or complexity because they do not have to build large numbers of them. On the other hand, designers of hand-held cellular phones put a high priority on power efficiency because these phones need to run on a battery. Cost is also a high priority because cellular phones must be low-cost to encourage more users. Accord-ingly, these systems sacrifice some bandwidth efficiency to get power and cost efficiency. Every time one of these efficiency parameters (bandwidth, power, or cost) is increased, another one decreases, becomes more complex, or does not perform well in a poor environment. Cost is a dom-inant system priority. Low-cost radios will always be in demand. In the past, it was possible to make a radio low-cost by sacrificing power and band-width efficiency. This is no longer possible. The radio spectrum is very valuable and operators who do not use the spectrum efficiently could lose their existing licenses or lose out in the competition for new ones. These are the tradeoffs that must be considered in digital RF communications design. This application note covers•the reasons for the move to digital modulation;•how information is modulated onto in-phase (I) and quadrature (Q) signals;•different types of digital modulation;•filtering techniques to conserve bandwidth; •ways of looking at digitally modulated signals;•multiplexing techniques used to share the transmission channel;•how a digital transmitter and receiver work;•measurements on digital RF communications systems;•an overview table with key specifications for the major digital communications systems; and •a glossary of terms used in digital RF communi-cations.These concepts form the building blocks of any communications system. If you understand the building blocks, then you will be able to under-stand how any communications system, present or future, works.Introduction25 5 677 7 8 8 9 10 10 1112 12 12 13 14 14 15 15 16 17 18 19 20 21 22 22 23 23 24 25 26 27 28 29 29 30 311. Why Digital Modulation?1.1 Trading off simplicity and bandwidth1.2 Industry trends2. Using I/Q Modulation (Amplitude and Phase Control) to Convey Information2.1 Transmitting information2.2 Signal characteristics that can be modified2.3 Polar display—magnitude and phase representedtogether2.4 Signal changes or modifications in polar form2.5 I/Q formats2.6 I and Q in a radio transmitter2.7 I and Q in a radio receiver2.8 Why use I and Q?3. Digital Modulation Types and Relative Efficiencies3.1 Applications3.1.1 Bit rate and symbol rate3.1.2 Spectrum (bandwidth) requirements3.1.3 Symbol clock3.2 Phase Shift Keying (PSK)3.3 Frequency Shift Keying3.4 Minimum Shift Keying (MSK)3.5 Quadrature Amplitude Modulation (QAM)3.6 Theoretical bandwidth efficiency limits3.7 Spectral efficiency examples in practical radios3.8 I/Q offset modulation3.9 Differential modulation3.10 Constant amplitude modulation4. Filtering4.1 Nyquist or raised cosine filter4.2 Transmitter-receiver matched filters4.3 Gaussian filter4.4 Filter bandwidth parameter alpha4.5 Filter bandwidth effects4.6 Chebyshev equiripple FIR (finite impulse response) filter4.7 Spectral efficiency versus power consumption5. Different Ways of Looking at a Digitally Modulated Signal Time and Frequency Domain View5.1 Power and frequency view5.2 Constellation diagrams5.3 Eye diagrams5.4 Trellis diagramsTable of Contents332 32 32 33 33 34 3435 35 3637 37 37 38 38 39 39 39 40 41 41 42 434344466. Sharing the Channel6.1 Multiplexing—frequency6.2 Multiplexing—time6.3 Multiplexing—code6.4 Multiplexing—geography6.5 Combining multiplexing modes6.6 Penetration versus efficiency7. How Digital Transmitters and Receivers Work7.1 A digital communications transmitter7.2 A digital communications receiver8. Measurements on Digital RF Communications Systems 8.1 Power measurements8.1.1 Adjacent Channel Power8.2 Frequency measurements8.2.1 Occupied bandwidth8.3 Timing measurements8.4 Modulation accuracy8.5 Understanding Error Vector Magnitude (EVM)8.6 Troubleshooting with error vector measurements8.7 Magnitude versus phase error8.8 I/Q phase error versus time8.9 Error Vector Magnitude versus time8.10 Error spectrum (EVM versus frequency)9. Summary10. Overview of Communications Systems11. Glossary of TermsTable of Contents (continued)4The move to digital modulation provides more information capacity, compatibility with digital data services, higher data security, better quality communications, and quicker system availability. Developers of communications systems face these constraints:•available bandwidth•permissible power•inherent noise level of the systemThe RF spectrum must be shared, yet every day there are more users for that spectrum as demand for communications services increases. Digital modulation schemes have greater capacity to con-vey large amounts of information than analog mod-ulation schemes. 1.1 Trading off simplicity and bandwidthThere is a fundamental tradeoff in communication systems. Simple hardware can be used in transmit-ters and receivers to communicate information. However, this uses a lot of spectrum which limits the number of users. Alternatively, more complex transmitters and receivers can be used to transmit the same information over less bandwidth. The transition to more and more spectrally efficient transmission techniques requires more and more complex hardware. Complex hardware is difficult to design, test, and build. This tradeoff exists whether communication is over air or wire, analog or digital.Figure 1. The Fundamental Tradeoff1. Why Digital Modulation?51.2 Industry trendsOver the past few years a major transition has occurred from simple analog Amplitude Mod-ulation (AM) and Frequency/Phase Modulation (FM/PM) to new digital modulation techniques. Examples of digital modulation include•QPSK (Quadrature Phase Shift Keying)•FSK (Frequency Shift Keying)•MSK (Minimum Shift Keying)•QAM (Quadrature Amplitude Modulation) Another layer of complexity in many new systems is multiplexing. Two principal types of multiplex-ing (or “multiple access”) are TDMA (Time Division Multiple Access) and CDMA (Code Division Multiple Access). These are two different ways to add diversity to signals allowing different signals to be separated from one another.Figure 2. Trends in the Industry62.1 Transmitting informationTo transmit a signal over the air, there are three main steps:1.A pure carrier is generated at the transmitter.2.The carrier is modulated with the informationto be transmitted. Any reliably detectablechange in signal characteristics can carryinformation.3.At the receiver the signal modifications orchanges are detected and demodulated.2.2 Signal characteristics that can be modified There are only three characteristics of a signal that can be changed over time: amplitude, phase, or fre-quency. However, phase and frequency are just dif-ferent ways to view or measure the same signal change. In AM, the amplitude of a high-frequency carrier signal is varied in proportion to the instantaneous amplitude of the modulating message signal.Frequency Modulation (FM) is the most popular analog modulation technique used in mobile com-munications systems. In FM, the amplitude of the modulating carrier is kept constant while its fre-quency is varied by the modulating message signal.Amplitude and phase can be modulated simultane-ously and separately, but this is difficult to gener-ate, and especially difficult to detect. Instead, in practical systems the signal is separated into another set of independent components: I(In-phase) and Q(Quadrature). These components are orthogonal and do not interfere with each other.Figure 3. Transmitting Information (Analog or Digital)Figure 4. Signal Characteristics to Modify2. Using I/Q Modulation to Convey Information72.3 Polar display—magnitude and phase repre-sented togetherA simple way to view amplitude and phase is with the polar diagram. The carrier becomes a frequency and phase reference and the signal is interpreted relative to the carrier. The signal can be expressed in polar form as a magnitude and a phase. The phase is relative to a reference signal, the carrier in most communication systems. The magnitude is either an absolute or relative value. Both are used in digital communication systems. Polar diagrams are the basis of many displays used in digital com-munications, although it is common to describe the signal vector by its rectangular coordinates of I (In-phase) and Q(Quadrature).2.4 Signal changes or modifications inpolar formFigure 6 shows different forms of modulation in polar form. Magnitude is represented as the dis-tance from the center and phase is represented as the angle.Amplitude modulation (AM) changes only the magnitude of the signal. Phase modulation (PM) changes only the phase of the signal. Amplitude and phase modulation can be used together. Frequency modulation (FM) looks similar to phase modulation, though frequency is the controlled parameter, rather than relative phase.Figure 6. Signal Changes or Modifications8One example of the difficulties in RF design can be illustrated with simple amplitude modulation. Generating AM with no associated angular modula-tion should result in a straight line on a polar display. This line should run from the origin to some peak radius or amplitude value. In practice, however, the line is not straight. The amplitude modulation itself often can cause a small amount of unwanted phase modulation. The result is a curved line. It could also be a loop if there is any hysteresis in the system transfer function. Some amount of this distortion is inevitable in any sys-tem where modulation causes amplitude changes. Therefore, the degree of effective amplitude modu-lation in a system will affect some distortion parameters.2.5 I/Q formatsIn digital communications, modulation is often expressed in terms of I and Q. This is a rectangular representation of the polar diagram. On a polar diagram, the I axis lies on the zero degree phase reference, and the Q axis is rotated by 90 degrees. The signal vector’s projection onto the I axis is its “I” component and the projection onto the Q axisis its “Q” component.Figure 7. “I-Q” Format92.6 I and Q in a radio transmitterI/Q diagrams are particularly useful because they mirror the way most digital communications sig-nals are created using an I/Q modulator. In the transmitter, I and Q signals are mixed with the same local oscillator (LO). A 90 degree phase shifter is placed in one of the LO paths. Signals that are separated by 90 degrees are also known as being orthogonal to each other or in quadrature. Signals that are in quadrature do not interfere with each other. They are two independent compo-nents of the signal. When recombined, they are summed to a composite output signal. There are two independent signals in I and Q that can be sent and received with simple circuits. This simpli-fies the design of digital radios. The main advan-tage of I/Q modulation is the symmetric ease of combining independent signal components into a single composite signal and later splitting such a composite signal into its independent component parts. 2.7 I and Q in a radio receiverThe composite signal with magnitude and phase (or I and Q) information arrives at the receiver input. The input signal is mixed with the local oscillator signal at the carrier frequency in two forms. One is at an arbitrary zero phase. The other has a 90 degree phase shift. The composite input signal (in terms of magnitude and phase) is thus broken into an in-phase, I, and a quadrature, Q, component. These two components of the signal are independent and orthogonal. One can be changed without affecting the other. Normally, information cannot be plotted in a polar format and reinterpreted as rectangular values without doing a polar-to-rectangular conversion. This con-version is exactly what is done by the in-phase and quadrature mixing processes in a digital radio. A local oscillator, phase shifter, and two mixers can perform the conversion accurately and efficiently.Figure 8. I and Q in a Practical Radio Transmitter Figure 9. I and Q in a Radio Receiver102.8 Why use I and Q?Digital modulation is easy to accomplish with I/Q modulators. Most digital modulation maps the data to a number of discrete points on the I/Q plane. These are known as constellation points. As the sig-nal moves from one point to another, simultaneous amplitude and phase modulation usually results. To accomplish this with an amplitude modulator and a phase modulator is difficult and complex. It is also impossible with a conventional phase modu-lator. The signal may, in principle, circle the origin in one direction forever, necessitating infinite phase shifting capability. Alternatively, simultaneous AM and Phase Modulation is easy with an I/Q modulator. The I and Q control signals are bounded, but infi-nite phase wrap is possible by properly phasing the I and Q signals.This section covers the main digital modulation formats, their main applications, relative spectral efficiencies, and some variations of the main modulation types as used in practical systems. Fortunately, there are a limited number of modula-tion types which form the building blocks of any system.3.1 ApplicationsThe table below covers the applications for differ-ent modulation formats in both wireless communi-cations and video. Although this note focuses on wireless communica-tions, video applications have also been included in the table for completeness and because of their similarity to other wireless communications.3.1.1 Bit rate and symbol rateTo understand and compare different modulation format efficiencies, it is important to first under-stand the difference between bit rate and symbol rate. The signal bandwidth for the communications channel needed depends on the symbol rate, not on the bit rate.Symbol rate =bit ratethe number of bits transmitted with each symbol 3. Digital Modulation Types and Relative EfficienciesBit rate is the frequency of a system bit stream. Take, for example, a radio with an 8 bit sampler, sampling at 10 kHz for voice. The bit rate, the basic bit stream rate in the radio, would be eight bits multiplied by 10K samples per second, or 80 Kbits per second. (For the moment we will ignore the extra bits required for synchronization, error correction, etc.)Figure 10 is an example of a state diagram of a Quadrature Phase Shift Keying (QPSK) signal. The states can be mapped to zeros and ones. This is a common mapping, but it is not the only one. Any mapping can be used.The symbol rate is the bit rate divided by the num-ber of bits that can be transmitted with each sym-bol. If one bit is transmitted per symbol, as with BPSK, then the symbol rate would be the same as the bit rate of 80 Kbits per second. If two bits are transmitted per symbol, as in QPSK, then the sym-bol rate would be half of the bit rate or 40 Kbits per second. Symbol rate is sometimes called baud rate. Note that baud rate is not the same as bit rate. These terms are often confused. If more bits can be sent with each symbol, then the same amount of data can be sent in a narrower spec-trum. This is why modulation formats that are more complex and use a higher number of states can send the same information over a narrower piece of the RF spectrum.3.1.2 Spectrum (bandwidth) requirementsAn example of how symbol rate influences spec-trum requirements can be seen in eight-state Phase Shift Keying (8PSK). It is a variation of PSK. There are eight possible states that the signal can transi-tion to at any time. The phase of the signal can take any of eight values at any symbol time. Since 23= 8, there are three bits per symbol. This means the symbol rate is one third of the bit rate. This is relatively easy to decode.Figure 10. Bit Rate and Symbol Rate Figure 11. Spectrum Requirements3.1.3 Symbol ClockThe symbol clock represents the frequency and exact timing of the transmission of the individual symbols. At the symbol clock transitions, the trans-mitted carrier is at the correct I/Q(or magnitude/ phase) value to represent a specific symbol (a specific point in the constellation).3.2 Phase Shift KeyingOne of the simplest forms of digital modulation is binary or Bi-Phase Shift Keying (BPSK). One appli-cation where this is used is for deep space teleme-try. The phase of a constant amplitude carrier sig-nal moves between zero and 180 degrees. On an I and Q diagram, the I state has two different values. There are two possible locations in the state dia-gram, so a binary one or zero can be sent. The symbol rate is one bit per symbol.A more common type of phase modulation is Quadrature Phase Shift Keying (QPSK). It is used extensively in applications including CDMA (Code Division Multiple Access) cellular service, wireless local loop, Iridium (a voice/data satellite system) and DVB-S (Digital Video Broadcasting — Satellite). Quadrature means that the signal shifts between phase states which are separated by 90 degrees. The signal shifts in increments of 90 degrees from 45 to 135, –45, or –135 degrees. These points are chosen as they can be easily implemented using an I/Q modulator. Only two I values and two Q values are needed and this gives two bits per symbol. There are four states because 22= 4. It is therefore a more bandwidth-efficient type of modulation than BPSK, potentially twice as efficient.Figure 12. Phase Shift Keying3.3 Frequency Shift KeyingFrequency modulation and phase modulation are closely related. A static frequency shift of +1 Hz means that the phase is constantly advancing at the rate of 360 degrees per second (2 πrad/sec), relative to the phase of the unshifted signal.FSK (Frequency Shift Keying) is used in many applications including cordless and paging sys-tems. Some of the cordless systems include DECT (Digital Enhanced Cordless Telephone) and CT2 (Cordless Telephone 2).In FSK, the frequency of the carrier is changed as a function of the modulating signal (data) being transmitted. Amplitude remains unchanged. In binary FSK (BFSK or 2FSK), a “1” is represented by one frequency and a “0” is represented by another frequency.3.4 Minimum Shift KeyingSince a frequency shift produces an advancing or retarding phase, frequency shifts can be detected by sampling phase at each symbol period. Phase shifts of (2N + 1) π/2radians are easily detected with an I/Q demodulator. At even numbered sym-bols, the polarity of the I channel conveys the transmitted data, while at odd numbered symbols the polarity of the Q channel conveys the data. This orthogonality between I and Q simplifies detection algorithms and hence reduces power con-sumption in a mobile receiver. The minimum fre-quency shift which yields orthogonality of I and Q is that which results in a phase shift of ±π/2radi-ans per symbol (90 degrees per symbol). FSK with this deviation is called MSK (Minimum Shift Keying). The deviation must be accurate in order to generate repeatable 90 degree phase shifts. MSK is used in the GSM (Global System for Mobile Communications) cellular standard. A phase shift of +90 degrees represents a data bit equal to “1,”while –90 degrees represents a “0.” The peak-to-peak frequency shift of an MSK signal is equal to one-half of the bit rate.FSK and MSK produce constant envelope carrier signals, which have no amplitude variations. This is a desirable characteristic for improving the power efficiency of transmitters. Amplitude varia-tions can exercise nonlinearities in an amplifier’s amplitude-transfer function, generating spectral regrowth, a component of adjacent channel power. Therefore, more efficient amplifiers (which tend to be less linear) can be used with constant-envelope signals, reducing power consumption.Figure 13. Frequency Shift KeyingMSK has a narrower spectrum than wider devia-tion forms of FSK. The width of the spectrum is also influenced by the waveforms causing the fre-quency shift. If those waveforms have fast transi-tions or a high slew rate, then the spectrumof the transmitter will be broad. In practice, the waveforms are filtered with a Gaussian filter, resulting in a narrow spectrum. In addition, the Gaussian filter has no time-domain overshoot, which would broaden the spectrum by increasing the peak deviation. MSK with a Gaussian filter is termed GMSK (Gaussian MSK).3.5 Quadrature Amplitude ModulationAnother member of the digital modulation family is Quadrature Amplitude Modulation (QAM). QAM is used in applications including microwave digital radio, DVB-C (Digital Video Broadcasting—Cable), and modems.In 16-state Quadrature Amplitude Modulation (16QAM), there are four I values and four Q values. This results in a total of 16 possible states for the signal. It can transition from any state to any other state at every symbol time. Since 16 = 24, four bits per symbol can be sent. This consists of two bits for I and two bits for Q. The symbol rate is one fourth of the bit rate. So this modulation format produces a more spectrally efficient transmission. It is more efficient than BPSK, QPSK, or 8PSK. Note that QPSK is the same as 4QAM.Another variation is 32QAM. In this case there are six I values and six Q values resulting in a total of 36 possible states (6x6=36). This is too many states for a power of two (the closest power of two is 32). So the four corner symbol states, which take the most power to transmit, are omitted. This reduces the amount of peak power the transmitter has to generate. Since 25= 32, there are five bits per sym-bol and the symbol rate is one fifth of the bit rate. The current practical limits are approximately256QAM, though work is underway to extend the limits to 512 or 1024 QAM. A 256QAM system uses 16 I-values and 16 Q-values, giving 256 possible states. Since 28= 256, each symbol can represent eight bits. A 256QAM signal that can send eight bits per symbol is very spectrally efficient. However, the symbols are very close together and are thus more subject to errors due to noise and distortion. Such a signal may have to be transmit-ted with extra power (to effectively spread the symbols out more) and this reduces power efficiency as compared to simpler schemes.Figure 14. Quadrature Amplitude ModulationCompare the bandwidth efficiency when using256QAM versus BPSK modulation in the radio example in section 3.1.1 (which uses an eight-bit sampler sampling at 10 kHz for voice). BPSK uses80 Ksymbols-per-second sending 1 bit per symbol.A system using 256QAM sends eight bits per sym-bol so the symbol rate would be 10 Ksymbols per second. A 256QAM system enables the same amount of information to be sent as BPSK using only one eighth of the bandwidth. It is eight times more bandwidth efficient. However, there is a tradeoff. The radio becomes more complex and is more susceptible to errors caused by noise and dis-tortion. Error rates of higher-order QAM systems such as this degrade more rapidly than QPSK as noise or interference is introduced. A measureof this degradation would be a higher Bit Error Rate (BER).In any digital modulation system, if the input sig-nal is distorted or severely attenuated the receiver will eventually lose symbol lock completely. If the receiver can no longer recover the symbol clock, it cannot demodulate the signal or recover any infor-mation. With less degradation, the symbol clock can be recovered, but it is noisy, and the symbol locations themselves are noisy. In some cases, a symbol will fall far enough away from its intended position that it will cross over to an adjacent posi-tion. The I and Q level detectors used in the demodulator would misinterpret such a symbol as being in the wrong location, causing bit errors. QPSK is not as efficient, but the states are much farther apart and the system can tolerate a lot more noise before suffering symbol errors. QPSK has no intermediate states between the four corner-symbol locations, so there is less opportunity for the demodulator to misinterpret symbols. QPSK requires less transmitter power than QAM to achieve the same bit error rate.3.6 Theoretical bandwidth efficiency limits Bandwidth efficiency describes how efficiently the allocated bandwidth is utilized or the ability of a modulation scheme to accommodate data, within a limited bandwidth. The table below shows the theoretical bandwidth efficiency limits for the main modulation types. Note that these figures cannot actually be achieved in practical radios since they require perfect modulators, demodula-tors, filter, and transmission paths.If the radio had a perfect (rectangular in the fre-quency domain) filter, then the occupied band-width could be made equal to the symbol rate.Techniques for maximizing spectral efficiency include the following:•Relate the data rate to the frequency shift (as in GSM).•Use premodulation filtering to reduce the occupied bandwidth. Raised cosine filters,as used in NADC, PDC, and PHS, give thebest spectral efficiency.•Restrict the types of transitions.Modulation Theoretical bandwidthformat efficiencylimitsMSK 1bit/second/HzBPSK 1bit/second/HzQPSK 2bits/second/Hz8PSK 3bits/second/Hz16 QAM 4 bits/second/Hz32 QAM 5 bits/second/Hz64 QAM 6 bits/second/Hz256 QAM 8 bits/second/HzEffects of going through the originTake, for example, a QPSK signal where the normalized value changes from 1, 1 to –1, –1. When changing simulta-neously from I and Q values of +1 to I and Q values of –1, the signal trajectory goes through the origin (the I/Q value of 0,0). The origin represents 0 carrier magnitude. A value of 0 magnitude indicates that the carrier amplitude is 0 for a moment.Not all transitions in QPSK result in a trajectory that goes through the origin. If I changes value but Q does not (or vice-versa) the carrier amplitude changes a little, but it does not go through zero. Therefore some symbol transi-tions will result in a small amplitude variation, while others will result in a very large amplitude variation. The clock-recovery circuit in the receiver must deal with this ampli-tude variation uncertainty if it uses amplitude variations to align the receiver clock with the transmitter clock. Spectral regrowth does not automatically result from these trajectories that pass through or near the origin. If the amplifier and associated circuits are perfectly linear, the spectrum (spectral occupancy or occupied bandwidth) will be unchanged. The problem lies in nonlinearities in the circuits.A signal which changes amplitude over a very large range will exercise these nonlinearities to the fullest extent. These nonlinearities will cause distortion products. In con-tinuously modulated systems they will cause “spectral regrowth” or wider modulation sidebands (a phenomenon related to intermodulation distortion). Another term which is sometimes used in this context is “spectral splatter.”However this is a term that is more correctly used in asso-ciation with the increase in the bandwidth of a signal caused by pulsing on and off.3.7 Spectral efficiency examples inpractical radiosThe following examples indicate spectral efficien-cies that are achieved in some practical radio systems.The TDMA version of the North American Digital Cellular (NADC) system, achieves a 48 Kbits-per-second data rate over a 30 kHz bandwidth or 1.6 bits per second per Hz. It is a π/4 DQPSK based system and transmits two bits per symbol. The theoretical efficiency would be two bits per second per Hz and in practice it is 1.6 bits per second per Hz.Another example is a microwave digital radio using 16QAM. This kind of signal is more susceptible to noise and distortion than something simpler such as QPSK. This type of signal is usually sent over a direct line-of-sight microwave link or over a wire where there is very little noise and interference. In this microwave-digital-radio example the bit rate is 140 Mbits per second over a very wide bandwidth of 52.5 MHz. The spectral efficiency is 2.7 bits per second per Hz. To implement this, it takes a very clear line-of-sight transmission path and a precise and optimized high-power transceiver.。
中央空调控制系统中英文对照外文翻译文献

中英文对照外文翻译(文档含英文原文和中文翻译)基于PLC的中央空调控制系统1引言在PLC被开发出来的三十年里,它经过不断地发展,已经能结合模拟I/O,网络通信以及采用新的编程标准如IEC 61131-3。
然而,工程师们只需利用数字I/O和少量的模拟I/O数以及简单的编程技巧就可开发出80%的工业应用。
PLC已经广泛的应用在所有的工业部门。
据“美国市场信息”的世界PLC以及软件市场报告称,1995年全球PLC及其软件的市场经济规模约50亿美元[5]。
随着电子技术和计算机技术的发展,PLC的功能得到大大的增强。
由于采用传统的工具可以解决80%的工业应用,这样就强烈地需要有低成本简单的PLC;从而促进了低成本微型PLC的增长,它带有用梯形逻辑编程的数字I/O。
然而,这也在控制技术上造成了不连续性,一方面80%的应用需要使用简单的低成本控制器,而另一方面其它的20%应用则超出了传统控制系统所能提供的功能。
工程师在开发这些20%的应用需要有更高的循环速率,高级控制算法,更多模拟功能以及能更好地和企业网络集成。
在八十和九十年代,那些要开发“20%应用”的工程师们已考虑在工业控制中使用PC。
PC所提供的软件功能可以执行高级任务,提供丰富的图形化编程和用户环境,并且PC的COTS部件使控制工程师能把不断发展的技术用于其它应用。
这些技术包括浮点处理器;高速I/O总线,如PCI和以太网;固定数据存储器;图形化软件开发工具。
而且PC还能提供无比的灵活性,高效的软件以及高级的低成本硬件。
冰蓄冷中央空调是将电网夜间谷荷多余电力以冰的冷量形式储存起来,在白天用电高峰时将冰融化提供空调服务。
由于我国大部分地区夜间电价比白天低得多,所以采用冰储冷中央空调能大大减少用户的运行费用。
冰蓄冷中央空调系统配置的设备比常规空调系统要增加一些,自动化程度要求较高,但它能自动实现在满足建筑物全天空调要求的条件下将每天所蓄的能量全部用完,最大限度地节省运行费用。
数字调制解调技术-外文翻译
数字调制解调技术英文文献Technology of digital modulation and demodulation plays a important role in digital communication system, the combination of digital communication technology and FPGA is a certainly trend . With the development of software radio, the requirement for technology of modulation and demodulation is higher and higher. This paper starts with studying digital modulation and demodulation theory at first, and analyses basic principle of three kinds of important modulation and demodulation way ( FSK, MSK, GMSK ).The Rohde &Schwarz SME03, Signal Generator, provides AM modulation and External FSK digital modulation required for the development and testing of digital mobile radio receivers.The application of PWM in digital modulation and demodulation for analog communication signals in several modulation modes Research results prove that the design of digital IF modulator and demodulator of Software Radio appeases the capability and requirement of Software Radio.A transfusion speed monitor system is designed based on infrared technology with modulation and demodulation.It's the combination of modulator and demodulator.Time synchronization that is key technology of digital demodulation is cc allied by software.The paper provides the design of hardware of digital IF modulator and demodulator of Software Radio which includes Digital Signal Processor、Micro Control Unit and AD/DA convertor etc.Digital Down/Up Converter(DDC/DUC), modulation and demodulation are discussed in the dissertation as some essencial parts of SDR platform. Two Way Automatic Communication System(TWACS) is a new valuable communication technology for distribution networks,which has special of modulation and demodulation. In this paper, we study the OFDM technology based on 802.16a, realize the baseband modulation and demodulation by using TMS320C6201, and optimize the software module. The paper introduces the principle of QPSK modulation and demodulation, the circuit are also be realized based on FPGA.With the improvement of the technology, especially in the fields such as computer technology , data coding and compress , digital modulation and VLSI, the world electronic information industry enter into the digital era. First, the features of fax communication and the mode of modulation and demodulation are described.In automatic classification of digital modulation signal,computing envelope variance after difference has important meaning to distinguish PSK and FSK signal.The science and technology of space flight.The effect on modulation and demodulation of QPSK via carrier phase noise can not be ignored, and it is difficult to analyze.Digital modulation error parameters, such as error vector magnitude EVM, is important in test and measurement of information system. This paper introduces the technology research progress in the metrology of digital modulation error parameters. First, we point out the basic problems existing in the field, which is about traceability and parameter range of calibration, and describe the relevant research, such as the thinking and technology of the `RF waveform metrology'. Then, we highlight the research progress of our team: 1). The metrology method and system for digital demodulation error parameter based on CW combination, which fits BPSK, QPSK, 8PSK, 16QAM, 64QAM modulation: this method can achieve traceability and error setting ability in a wide range, when standard EvmRms is 1.585%, the expanded uncertainty (k=2) is 0.009%. 2). The metrology method and system for digitaldemodulation error parameter based on analog AM or PM. 3). The metrology method and system for digital demodulation error parameter based on IQ gain imbalance and phase imbalance. 4). The metrology method and system for digital demodulation error parameter based on analog PM in the aspect of GMSK and FSK modulation. 5). The metrology method and system for digital demodulation error parameter based on Baseband waveform design. Based on these methods, our proposal are given as follows: first, establish public metrology standard for digital modulation error parameters; second, develop a new type of instrument "vector signal analyzer calibrator".In this paper, we propose a novel method of chaotic modulation based on the combination of Chaotic Pulse Position Modulation (CPPM) and Chaotic Pulse WidthModulation (CPWM). This combination looks very promising for the improvement of information privacy in chaos-based digital communications. In the CPPM+CPWM method, each pulse is a chaotic symbol which carries binary information of two bits corresponding to its position and width, where the position is determined by the interval between rising edge of the current pulse compared to the previous one and the width is determined by the duration between the rising edge and the falling edge of the same pulse. This offers the increase of bit rate, bandwidth efficiency and privacy in comparison with the method of CPPM. The schemes of Modulation andDemodulation (MoDem) of CPPM+CPWM are proposed, designed and analyzed that based on the conventional schemes of CPPM. The numerical simulation in time domain of the system of CPPM+CPWM MoDem is implemented in Matlab/Simulink. It gives a summary of theoretical and practical studies on the properties of pulse-phase modulation, developed mainly in 1943. The properties of pulse-phasemodulation are studied by means of Fourier transformations. Although some approximations are introduced, the calculations lead to the following definite conclusions: (1) Pulse-phase modulation introduces no amplitude distortion except at sub-multiples of the recurrent frequency. (2) The harmonic distortion, if any, is negligible and this method of modulation can be used for high-quality broadcasting.(3) Pulse-phase modulation is subject to a special type of distortion called ?cross-distortion,? produced by side bands of the recurrent frequency appearing in the signal bandwidth. Curves of the approximate amount of this type of distortion are given, and it is shown that, in practical multi-channel systems, this distortion isnegligible, provided that the recurrent pulse frequency is at least double the highest signal frequency to be transmitted, and preferably equal to, or greater than, three times this frequency. This study is followed by considerations on the signal/noise ratio in pulse-phase modulation. Pulse-phasemodulation is compared with amplitude modulation and a formula, giving the improvement in the signal/noise ratio due to pulse-phase modulation, is established by very simple considerations. It is shown that this ratio improves as the frequency bandwidth used in pulse-phase modulation. It is shown how an improvement of 3 db in signal/noise ratio can be obtained by suppressing the noise on the synchronizing pulse, and a practical circuit developed and applied in 1943 by the author is described. Finally, a typical example of pulse technique is given. In practical circuits the modulator and demodulator pulses are not perfectly shaped, because of the departure from linearity due to finite time-constants. This introduces harmonic distortion. It is shown how this distortion can be practically elimi- nated by designing circuits so that the time constant is equal at modulationand demodulation.It present a novel technique for digital data modulation and demodulationcalled triangular modulation (TM). The modulation technique was developed primarily to maximize the amount of data sent over a limited bandwidth channel while still maintaining very good noise rejection and signal distortion performance. Themodulation technique involves breaking digital data into a series of parallel words. Each word is then represented by one half period of a triangular waveform whose slope is proportional to the value of the parallel word it represents. Thedemodulation technique for this uniquely defined waveform involves first digitizing the waveform at a higher constant sampling rate. A linear regression algorithm using the method of least squares is then used to compute the slope of the digitized waveform to a very high precision. This process is repeated for each rising and falling edge of the triangular modulated waveform. All encoded data is extracted by precise slope computation since each slope uniquely defines the encoded data word it represents. The ability of the demodulation algorithm to compute the exact slope of the modulated waveform determines how many bits can be represented by the modulated waveform. Transmission channel bandwidth limitations determine the allowable range of slopes used. Several simulations are performed to provide a sample of how the modulation method will perform in various real world environments. The paper also discusses several application areas where themodulation technique will provide superior results over other modulation methods.The theory of constant envelope orthogonal frequency division multiplexing (CE-OFDM) is analyzed in this paper, along with the introduction of the implementation method of CE-OFDM technique. Besides, the modulation and demodulation process is simulated and analyzed. And the results indicate that CE-OFDM conducts phasemodulation on the basis of OFDM modulation. Thus, FFT/IFFT is implemented in the transmitting and receiving terminals. Furthermore, the method of equalization applied in the demodulation process can optimize system performance. And also, CE-OFDM solves the problem of high peak-to-average power ratio (PAPR) in OFDM, reducing PAPR to 0Db.High efficient modulation technology is a hot research topic. UNB modulation, for its good performance, is paid to more attention. First, the article introduces EBPSK modulation scheme as UNB modulation method, gives its time and frequency domain characteristics and presents its optimized form in the same time, which can lower the sideband power level, while keeping the modulation information un-lost. Then, filter design is discussed about two zero and two pole digital filter, which shows narrower bandwidths and a fast response speed to the EBPSK based UNB modulated signals, although the filter bandwidth is much narrower, the modulationinformation still can be seen after the modulated signals filtered using it. Last, simulation is done about EBPSK based UNB modulation and demodulation, and experimental results show that EBPSK based UNB modulation has high bandwidth efficiency and a good, even better BER performance using the filters.中文译文数字调制解调技术在数字通信中占有非常重要的地位,数字通信技术与FPGA 的结合是现代通信系统发展的一个必然趋势。
数字信号处理的简单介绍文献翻译及英文原文
单位代码01学号070110105分类号密级文献翻译数字信号处理的简单论述院(系)名称信息工程学院专业名称通信工程学生姓名徐治明指导教师赵春雨2011年 4 月 5 日英文译文数字信号处理的简单论述冈萨雷斯(美国)一、数字信号处理的概述数字信号处理是将信号以数字方式表示并处理的理论和技术。
数字信号处理与模拟信号处理是信号处理的子集。
数字信号处理的目的是对真实世界的连续模拟信号进行测量或滤波。
因此在进行数字信号处理之前需要将信号从模拟域转换到数字域,这通常通过模数转换器实现。
而数字信号处理的输出经常也要变换到模拟域,这是通过数模转换器实现的。
数字信号处理的算法需要利用计算机或专用处理设备如数字信号处理器(DSP)和专用集成电路(ASIC)等。
数字信号处理技术及设备具有灵活、精确、抗干扰强、设备尺寸小、造价低、速度快等突出优点,这些都是模拟信号处理技术与设备所无法比拟的。
数字信号处理的核心算法是离散傅立叶变换(DFT),是DFT使信号在数字域和频域都实现了离散化,从而可以用通用计算机处理离散信号。
而使数字信号处理从理论走向实用的是快速傅立叶变换(FFT),FFT的出现大大减少了DFT的运算量,使实时的数字信号处理成为可能、极大促进了该学科的发展。
世界上三大DSP芯片生产商:1.德克萨斯仪器公司(TI) 2.模拟器件公司(ADI) 3.摩托罗拉公司(Motorola).这三家公司几乎垄断了通用DSP芯片市场。
数字信号处理的经典书籍是麻省理工学院奥本海姆编著的《Discrete Time Signal Processing》,有中译本《离散时间信号处理》由西安交通大学出版。
现在是第二版。
二、特征和分类信号(signal)是一种物理体现,或是传递信息的函数。
而信息是信号的具体内容。
模拟信号(analog signal):指时间连续、幅度连续的信号。
数字信号(digital signal):时间和幅度上都是离散(量化)的信号。
数字信号处理中英文对照外文翻译文献
中英文对照外文翻译(文档含英文原文和中文翻译)数字信号处理一、导论数字信号处理(DSP)是由一系列的数字或符号来表示这些信号的处理的过程的。
数字信号处理与模拟信号处理属于信号处理领域。
DSP包括子域的音频和语音信号处理,雷达和声纳信号处理,传感器阵列处理,谱估计,统计信号处理,数字图像处理,通信信号处理,生物医学信号处理,地震数据处理等。
由于DSP的目标通常是对连续的真实世界的模拟信号进行测量或滤波,第一步通常是通过使用一个模拟到数字的转换器将信号从模拟信号转化到数字信号。
通常,所需的输出信号却是一个模拟输出信号,因此这就需要一个数字到模拟的转换器。
即使这个过程比模拟处理更复杂的和而且具有离散值,由于数字信号处理的错误检测和校正不易受噪声影响,它的稳定性使得它优于许多模拟信号处理的应用(虽然不是全部)。
DSP算法一直是运行在标准的计算机,被称为数字信号处理器(DSP)的专用处理器或在专用硬件如特殊应用集成电路(ASIC)。
目前有用于数字信号处理的附加技术包括更强大的通用微处理器,现场可编程门阵列(FPGA),数字信号控制器(大多为工业应用,如电机控制)和流处理器和其他相关技术。
在数字信号处理过程中,工程师通常研究数字信号的以下领域:时间域(一维信号),空间域(多维信号),频率域,域和小波域的自相关。
他们选择在哪个领域过程中的一个信号,做一个明智的猜测(或通过尝试不同的可能性)作为该域的最佳代表的信号的本质特征。
从测量装置对样品序列产生一个时间或空间域表示,而离散傅立叶变换产生的频谱的频率域信息。
自相关的定义是互相关的信号本身在不同时间间隔的时间或空间的相关情况。
二、信号采样随着计算机的应用越来越多地使用,数字信号处理的需要也增加了。
为了在计算机上使用一个模拟信号的计算机,它上面必须使用模拟到数字的转换器(ADC)使其数字化。
采样通常分两阶段进行,离散化和量化。
在离散化阶段,信号的空间被划分成等价类和量化是通过一组有限的具有代表性的信号值来代替信号近似值。
5G无线通信网络中英文对照外文翻译文献
5G无线通信网络中英文对照外文翻译文献(文档含英文原文和中文翻译)翻译:5G无线通信网络的蜂窝结构和关键技术摘要第四代无线通信系统已经或者即将在许多国家部署。
然而,随着无线移动设备和服务的激增,仍然有一些挑战尤其是4G所不能容纳的,例如像频谱危机和高能量消耗。
无线系统设计师们面临着满足新型无线应用对高数据速率和机动性要求的持续性增长的需求,因此他们已经开始研究被期望于2020年后就能部署的第五代无线系统。
在这篇文章里面,我们提出一个有内门和外门情景之分的潜在的蜂窝结构,并且讨论了多种可行性关于5G无线通信系统的技术,比如大量的MIMO技术,节能通信,认知的广播网络和可见光通信。
面临潜在技术的未知挑战也被讨论了。
介绍信息通信技术(ICT)创新合理的使用对世界经济的提高变得越来越重要。
无线通信网络在全球ICT战略中也许是最挑剔的元素,并且支撑着很多其他的行业,它是世界上成长最快最有活力的行业之一。
欧洲移动天文台(EMO)报道2010年移动通信业总计税收1740亿欧元,从而超过了航空航天业和制药业。
无线技术的发展大大提高了人们在商业运作和社交功能方面通信和生活的能力无线移动通信的显著成就表现在技术创新的快速步伐。
从1991年二代移动通信系统(2G)的初次登场到2001年三代系统(3G)的首次起飞,无线移动网络已经实现了从一个纯粹的技术系统到一个能承载大量多媒体内容网络的转变。
4G无线系统被设计出来用来满足IMT-A技术使用IP面向所有服务的需求。
在4G系统中,先进的无线接口被用于正交频分复用技术(OFDM),多输入多输出系统(MIMO)和链路自适应技术。
4G无线网络可支持数据速率可达1Gb/s的低流度,比如流动局域无线访问,还有速率高达100M/s的高流速,例如像移动访问。
LTE系统和它的延伸系统LTE-A,作为实用的4G系统已经在全球于最近期或不久的将来部署。
然而,每年仍然有戏剧性增长数量的用户支持移动宽频带系统。
数字通信系统的调制技术 翻译
引言这个应用笔记介绍了数字解调的概念在如今许多通信系统中的应用。
重点放在解释那些设计用来提高系统效率的设备。
大多数通信系统涉及到这三个类别之一:带宽效率、电源效率和成本效益。
带宽效率定义为一个调制方案将数据投放到有限的带宽上的能力。
电源效率定义为通信系统在最低的实际功率下可靠地发送信息的水平。
在大多数通信系统中,带宽效率放在很重要的位置上。
要优化的参数取决于特定系统的要求,可以在下面两个例子见。
对于地面数字微波无线电的设计者来说,最重要的是优秀的带宽效率同是具有低的比特错误率。
他们有足够的电源以供使用不用去担心电源效率。
他们并不太关心接受者的费用或者容易程度因为他们不必建立庞大的数量。
另一方面,手持蜂窝电话设计人员重视电源效率因为这些手机需要用电池运行。
费用也同样放在很重要的位置因为蜂窝手机必须用低费用去吸引更多的消费者。
所以,这些通信系统牺牲一些带宽效率去提高电源效率和降低成本。
每当这些关于效率的参数(带宽、电源和成本)其中之一增加的时候,另一个也会随之减少,或者变得更加复杂也可能在不好的环境下不能很好地工作。
成本费用是系统中的重中之重。
低成本无线电总是被需要的。
在过去,通过牺牲电源和带宽效率来减低无线电成本是可能的。
而如今情况已经改变了。
无线电频谱是非常有价值的,而那些不能很好地运用频谱效率的设备将会没有市场或者在竞争中被新产品所代替。
这些权衡因素必须在数字射频通信系统设计中考虑清楚。
应用笔记介绍:•用于移动数字调制的原因;•信息如何调制到同相和正交信号上;•不同种类的数字调制;•过滤技术来节省带宽;•在数字调制信号中的方法;•复用技术用于共享传输信道;•数字信道以及接受者如何工作;•数字射频通信系统的测量;•重要的数字通信系统的关键规格概述表;•应用在数字射频系统中的一个术语表这些概念在任何通信系统的建构中均存在。
如果你明白了这些结构,那么你就能够明白现在或者未来的任何通信系统如何工作。
第一章为什们进行数字调制移动数字调制提供了赋予更多信息的能力,更适合于数字数据服务,更高的数据安全性,更好品质的通信系统以及更快的系统可用性。
MSK调制解调系统设计的外文翻译
一:中文译文调频宽频传输MX589 GMSK调制移键控(msk)0.3 GMSK 1200作者Fred Kostedt, Engineer for MX-COM.James C. Kemerling, Engineer for MX-COM.引言随着计算机的普及,数据传输在当今社会的需求也在不断的增加,进而出现了传输数据的无线链路。
二进制数据组成的“一零”和“零一”的过渡,产生了丰富的谐波频谱内容,这并不适合射频传输。
因此,数字调制领域已得到了蓬勃的发展。
从最近的标准可以看到,如蜂窝数字分组数据(CDPD)和Mobitex*指定高斯滤波最小频移键控(GMSK)的调制方法就是数字调制领域的先进技术。
GMSK是一种简单而有效的数字调制的无线数据传输办法。
为了使我们更好的理解GMSK数字调制的方法,我们会分析MSK和GMSK的基本理论知识,以及如何运用GMSK数字调制方法来实现CDPD和Mobitex系统。
GMSK调制解调器降低了系统的复杂性,从而降低系统的成本。
但是,也有一些重要的实施细则需要加以考虑。
本文将涵盖其中的一些细节,把重点放在“典型”调频收音机拓扑接口的单芯片中的基带调制解调器的中频/射频部分。
背景如果我们看一下傅里叶级数展开的一个数据信号,我们可以看到谐波延伸到无穷远。
当这些谐波被总结,他们给它的数据信号急剧转变。
因此,一个过滤了的NRZ数据流用来调制射频载波将产生相当大的RF频谱的带宽。
当然,有严格的FCC的法规频谱和这种制度,这种使用情况通常被认为是不切实际的。
但是,如果我们在开始就移除高次谐波的傅立叶级数(即让数据信号通过一个低通滤器),其过程中的数据将逐步急剧减少。
这表明,premodulation过滤是一种在无线数据传输过程中减少被占领的频谱的很有效的方法。
除了紧凑的频谱,无线数据调制方案必须在有噪音的情况下能获得良好的误码率(BER)性能。
其性能也应该是线性的独立的功率放大设备从而允许使用C类功率放大器。
中英对照 调制技术
调制技术调制技术是把基带信号变换成传输信号的技术。
它将模拟信号抽样量化后,以二进制数字信号“1”或“0”对光载波进行通断调制,并进行脉冲编码(PCM)。
数字调制的优点是抗干扰能力强,中继时噪声及色散的影响不积累,因此可实现长距离传输。
它的缺点是需要较宽的频带,设备也复杂。
基带信号是原始的电信号,一般是指基本的信号波形,在数字通信中则指相应的电脉冲。
在无线遥测遥控系统和无线电技术中调制就是用基带信号控制高频载波的参数(振幅、频率和相位),使这些参数随基带信号变化。
用来控制高频载波参数的基带信号称为调制信号。
未调制的高频电振荡称为载波(可以是正弦波,也可以是非正弦波,如方波、脉冲序列等)。
被调制信号调制过的高频电振荡称为已调波或已调信号。
已调信号通过信道传送到接收端,在接收端经解调后恢复成原始基带信号。
解调是调制的反变换,是从已调波中提取调制信号的过程。
在无线电通信中常采用双重调制。
第一步用数字信号或模拟信号去调制第一个载波(称为副载波)。
或在多路通信中用调制技术实现多路复用(频分多路复用和时分多路复用)。
第二步用已调副载波或多路复用信号再调制一个公共载波,以便进行无线电传输。
第二步调制称为二次调制。
用基带信号调制高频载波,在无线电传输中可以减小天线尺寸,并便于远距离传输。
应用调制技术,还能提高信号的抗干扰能力。
调制方式调制方式按照调制信号的性质分为模拟调制和数字调制两类;按照载波的形式分为连续波调制和脉冲调制两类。
模拟调制有调幅(AM)、调频(FM)和调相(PM)。
数字调制有振幅键控(ASK)、移频键控(FSK)、移相键控(PSK)和差分移相键控 (DPSK)等。
脉冲调制有脉幅调制(PAM)、脉宽调制(PDM)、脉频调制(PFM)、脉位调制(PPM)、脉码调制(PCM)和增量调制(ΔM)。
示出常用调制方式的已调波形。
调制方式特性按照传输特性,调制方式又可分为线性调制和非线性调制。
广义的线性调制,是指已调波中被调参数随调制信号成线性变化的调制过程。
数字调制解调
多电平正交调幅(MQAM)电路框图
多电平正交调幅(MQAM)的矢量图
• 正交调制时,其两路载波应互为正交,相位差为900. 如此引出MAQM信号的矢量问题和星座问题。
• 现以4QAM信号为例,对其矢量图做一简介:
多电平正交调幅(MQAM)的星座图
• 所谓星座图是指只画出MQAM矢量端点的一种图形,并且图中星点 数与M值相等。(星座图上的各信号点之间的距离愈大,则其抗误 码能力就愈强。)
多进制幅移键控(MASK)
• 多电平数字调幅信号的表达式为:
e(t ) s(t )* A cos(t )
• 其中,s(t) 为多进制基带数字信号;A, , 为余弦载波信号的振幅、角频率和初相角。
分别
• 多进制幅移键控(MASK)的数字信号可以为单极性序 列,也可为双极性序列,它们对载波所进行的幅度调 制情况如下图所示:
正交幅度调制(QAM)
• 在彩色电视系统中,红色差、蓝色差信号就是先做正 交平衡调幅,再以矢量和的方法形成色度信号的,对 于PAL制而言,其相互关系为: F=Fu+Fv=U sin t +/-V cos t • 红、蓝色差信号的带宽各为1.3MHZ,其平衡调幅后的Fu ,Fv带宽各为2.6MHZ,利用正交平衡调幅再做矢量相 加变成色度信号后,其带宽仍为2.6MHZ,而不是 5.2MHZ,使频带利用率提高了1倍。
LED调光控制中英文对照外文翻译文献

中英文资料对照外文翻译译文LED调光控制及优点传统上,LED的调光是利用一个DC信号或滤液PWM对LED中的正向电流进行调节来完成的。
减小LED电流将起到调节LED 光输出强度的作用,然而,正向电流的变化也会改变LED的彩色,因为LED的色度会随着电流的变化而变化。
许多应用(例如汽车和LCD TV背光照明)都不能允许LED发生任何的色彩漂移。
在这些应用中,由于周围环境中存在不同的光线变化,而且人眼对于光强的微小变化都很敏感,因此宽范围调光是必需的。
通过施加一个PWM信号来控制LED亮度的做法允许不改变彩色的情况下完成LED的调光。
-1-人们常说的真正彩色(True Color)PWM调光是利用一个PWM 信号来调节LED的亮度。
调节LED亮度有三种常用方法:(1)使用SET电阻,在LED驱动控制IC引脚RSET两端并联不同的转换电阻,使用一个直流电压设置LED驱动控制IC引脚RSET的电流,从而改变LED的正向工作电流,达到调节ALED发光亮度的目的。
(2)采用PWM技术,利用PWM控制信号,通过控制LED的正向工作电流的占空比来调节ALED的发光亮度。
(3)线性调节最简便的方法是在LED驱动控制C中使用外部SET电阻来实现LED的调光控制。
虽然,这种调光控制方法有效,但却缺乏灵活性,无法让用户改变光强度。
线性调节则会降低效率,并引起白光LED朝向黄色光谱的色彩偏移。
可能是轻微的偏移,但可在敏感应用中检测出。
采用数字或叫PWM的LED调光控制法以大于100HZ的开关工作频率,以脉宽调制的方法改变LED驱动电流的脉冲占空比来实理LED的调光控制,选用大于100HZ开关调光控制频率主要是为了避免人眼感觉到调光闪烁现象,在LED的PWM调光控制下,LED-2-的发光亮度正比于PWM的脉冲占空比,在这种调光控制方法下,可以在高度调光比范围内保持LED的发光颜色不变,采用PWM的LED调光控制的调光比范围可达3000:1。
pid控制外文加中文文献(适用于毕业论文外文翻译+中英文对照)
PID controllerFrom Wikipedia, the free encyclopediaA proportional–integral–derivative controller (PID controller) is a generic .control loop feedback mechanism widely used in industrial control systems.A PID controller attempts to correct the error between a measured process variable and a desired setpoint by calculating and then outputting a corrective action that can adjust the process accordingly.The PID controller calculation (algorithm) involves three separate parameters; the Proportional, the Integral and Derivative values. The Proportional value determines the reaction to the current error, the Integral determines the reaction based on the sum of recent errors and the Derivative determines the reaction to the rate at which the error has been changing. The weightedsum of these three actions is used to adjust the process via a control element such as the position of a control valve or the power supply of a heating element.By "tuning" the three constants in the PID controller algorithm the PID can provide control action designed for specific process requirements. The response of the controller can be described in terms of the responsiveness of the controller to an error, the degree to which the controller overshoots the setpoint and the degree of system oscillation. Note that the use of the PID algorithm for control does not guarantee optimal control of the system or system stability.Some applications may require using only one or two modes to provide the appropriate system control. This is achieved by setting the gain of undesired control outputs to zero. A PID controller will be called a PI, PD, P or I controller in the absence of the respective control actions. PI controllers are particularly common, since derivative action is very sensitive to measurement noise, and the absence of an integral value may prevent the system from reaching its target value due to the control action.A block diagram of a PID controllerNote: Due to the diversity of the field of control theory and application, many naming conventions for the relevant variables are in common use.1.Control loop basicsA familiar example of a control loop is the action taken to keep one's shower water at the ideal temperature, which typically involves the mixing of two process streams, cold and hot water. The person feels the water to estimate its temperature. Based on this measurement they perform a control action: use the cold water tap to adjust the process. The person would repeat this input-output control loop, adjusting the hot water flow until the process temperature stabilized at the desired value.Feeling the water temperature is taking a measurement of the process value or process variable (PV). The desired temperature is called the setpoint (SP). The output from the controller and input to the process (the tap position) is called the manipulated variable (MV). The difference between the measurement and the setpoint is the error (e), too hot or too cold and by how much.As a controller, one decides roughly how much to change the tap position (MV) after one determines the temperature (PV), and therefore the error. This first estimate is the equivalent of the proportional action of a PID controller. The integral action of a PID controller can be thought of as gradually adjusting the temperature when it is almost right. Derivative action can be thought of as noticing the water temperature is getting hotter or colder, and how fast, and taking that into account when deciding how to adjust the tap.Making a change that is too large when the error is small is equivalent to a high gain controller and will lead toovershoot. If the controller were to repeatedly make changes that were too large and repeatedly overshoot the target, this control loop would be termed unstable and the output would oscillate around the setpoint in either a constant, growing, or decaying sinusoid. A human would not do this because we are adaptive controllers, learning from the process history, but PID controllers do not have the ability to learn and must be set up correctly. Selecting the correct gains for effective control is known as tuning the controller.If a controller starts from a stable state at zero error (PV = SP), then further changes by the controller will be in response to changes in other measured or unmeasured inputs to the process that impact on the process, and hence on the PV. Variables that impact on the process other than the MV are known as disturbances and generally controllers are used to reject disturbances and/or implement setpoint changes. Changes in feed water temperature constitute a disturbance to the shower process.In theory, a controller can be used to control any process which has a measurable output (PV), a known ideal value for that output (SP) and an input to the process (MV) that will affect the relevant PV. Controllers are used in industry to regulate temperature, pressure, flow rate, chemical composition, speed and practically every other variable for which a measurement exists. Automobile cruise control is an example of a process which utilizes automated control.Due to their long history, simplicity, well grounded theory and simple setup and maintenance requirements, PID controllers are the controllers of choice for many of these applications.2.PID controller theoryNote: This section describes the ideal parallel or non-interacting form of the PID controller. For other forms please see the Section "Alternative notation and PID forms".The PID control scheme is named after its three correcting terms, whose sum constitutes the manipulated variable (MV). Hence:where Pout, Iout, and Dout are the contributions to the output from the PID controller from each of the three terms, as defined below.2.1. Proportional termThe proportional term makes a change to the output that is proportional to the current error value. The proportional response can be adjusted by multiplying the error by a constant Kp, called the proportional gain.The proportional term is given by:WherePout: Proportional outputKp: Proportional Gain, a tuning parametere: Error = SP − PVt: Time or instantaneous time (the present)Change of response for varying KpA high proportional gain results in a large change in the output for a given change in the error. If the proportional gain is too high, the system can become unstable (See the section on Loop Tuning). In contrast, a small gain results in a small output response to a large input error, and a less responsive (or sensitive) controller. If the proportional gain is too low, the control action may be too small when responding to system disturbances.In the absence of disturbances, pure proportional control will not settle at its target value, but will retain a steady state error that is a function of the proportional gain and the process gain. Despite the steady-state offset, both tuning theory and industrial practice indicate that it is the proportional term that should contribute the bulk of the output change.2.2.Integral termThe contribution from the integral term is proportional to both the magnitude of the error and the duration of the error. Summing the instantaneous error over time (integrating the error) gives the accumulated offset that should have been corrected previously. The accumulated error is then multiplied by the integral gain and added to the controller output. The magnitude of the contribution of the integral term to the overall control action is determined by the integral gain, Ki.The integral term is given by:Change of response for varying KiWhereIout: Integral outputKi: Integral Gain, a tuning parametere: Error = SP − PVτ: Time in the past contributing to the integral responseThe integral term (when added to the proportional term) accelerates themovement of the process towards setpoint and eliminates the residual steady-state error that occurs with a proportional only controller. However, since the integral term is responding to accumulated errors from the past, it can cause the present value to overshoot the setpoint value (cross over the setpoint and then create a deviation in the other direction). For further notes regarding integral gain tuning and controller stability, see the section on loop tuning.2.3 Derivative termThe rate of change of the process error is calculated by determining the slope of the error over time (i.e. its first derivative with respect to time) and multiplying this rate of change by the derivative gain Kd. The magnitude of the contribution of the derivative term to the overall control action is termed the derivative gain, Kd.The derivative term is given by:Change of response for varying KdWhereDout: Derivative outputKd: Derivative Gain, a tuning parametere: Error = SP − PVt: Time or instantaneous time (the present)The derivative term slows the rate of change of the controller output and this effect is most noticeable close to the controller setpoint. Hence, derivative control isused to reduce the magnitude of the overshoot produced by the integral component and improve the combined controller-process stability. However, differentiation of a signal amplifies noise and thus this term in the controller is highly sensitive to noise in the error term, and can cause a process to become unstable if the noise and the derivative gain are sufficiently large.2.4 SummaryThe output from the three terms, the proportional, the integral and the derivative terms are summed to calculate the output of the PID controller. Defining u(t) as the controller output, the final form of the PID algorithm is:and the tuning parameters areKp: Proportional Gain - Larger Kp typically means faster response since thelarger the error, the larger the Proportional term compensation. An excessively large proportional gain will lead to process instability and oscillation.Ki: Integral Gain - Larger Ki implies steady state errors are eliminated quicker. The trade-off is larger overshoot: any negative error integrated during transient response must be integrated away by positive error before we reach steady state.Kd: Derivative Gain - Larger Kd decreases overshoot, but slows down transient response and may lead to instability due to signal noise amplification in the differentiation of the error.3. Loop tuningIf the PID controller parameters (the gains of the proportional, integral and derivative terms) are chosen incorrectly, the controlled process input can be unstable, i.e. its output diverges, with or without oscillation, and is limited only by saturation or mechanical breakage. Tuning a control loop is the adjustment of its control parameters (gain/proportional band, integral gain/reset, derivative gain/rate) to the optimum values for the desired control response.The optimum behavior on a process change or setpoint change varies depending on the application. Some processes must not allow an overshoot of the processvariable beyond the setpoint if, for example, this would be unsafe. Other processes must minimize the energy expended in reaching a new setpoint. Generally, stability of response (the reverse of instability) is required and the process must not oscillate for any combination of process conditions and setpoints. Some processes have a degree of non-linearity and so parameters that work well at full-load conditions don't work when the process is starting up from no-load. This section describes some traditional manual methods for loop tuning.There are several methods for tuning a PID loop. The most effective methods generally involve the development of some form of process model, then choosing P, I, and D based on the dynamic model parameters. Manual tuning methods can be relatively inefficient.The choice of method will depend largely on whether or not the loop can be taken "offline" for tuning, and the response time of the system. If the system can be taken offline, the best tuning method often involves subjecting the system to a step change in input, measuring the output as a function of time, and using this response to determine the control parameters.Choosing a Tuning MethodMethodAdvantagesDisadvantagesManual TuningNo math required. Online method.Requires experiencedpersonnel.Ziegler–NicholsProven Method. Online method.Process upset, sometrial-and-error, very aggressive tuning.Software ToolsConsistent tuning. Online or offline method. May includevalve and sensor analysis. Allow simulation before downloading.Some costand training involved.Cohen-CoonGood process models.Some math. Offline method. Only good for first-order processes.3.1 Manual tuningIf the system must remain online, one tuning method is to first set the I and D values to zero. Increase the P until the output of the loop oscillates, then the P shouldbe left set to be approximately half of that value for a "quarter amplitude decay" type response. Then increase D until any offset is correct in sufficient time for the process. However, too much D will cause instability. Finally, increase I, if required, until the loop is acceptably quick to reach its reference after a load disturbance. However, too much I will cause excessive response and overshoot. A fast PID loop tuning usually overshoots slightly to reach the setpoint more quickly; however, some systems cannot accept overshoot, in which case an "over-damped" closed-loop system is required, which will require a P setting significantly less than half that of the P setting causing oscillation.3.2Ziegler –Nichols methodAnother tuning method is formally known as the Ziegler –Nichols method, introduced by John G . Ziegler and Nathaniel B. Nichols. As in the method above, the I and D gains are first set to zero. The "P" gain is increased until it reaches the "critical gain" Kc at which the output of theloop starts to oscillate. Kc and the oscillation period Pc are used to set the gains as shown:3.3 PID tuning softwareMost modern industrial facilities no longer tune loops using the manualcalculation methods shown above. Instead, PID tuning and loop optimization software are used to ensure consistent results. These software packages will gather the data, develop process models, and suggest optimal tuning. Some software packages can even develop tuning by gathering data from reference changes.Mathematical PID loop tuning induces an impulse in the system, and then uses the controlled system's frequency response to design the PID loop values. In loops with response times of several minutes, mathematical loop tuning is recommended, because trial and error can literally take days just to find a stable set of loop values. Optimal values are harder to find. Some digital loop controllers offer a self-tuning feature in which very small setpoint changes are sent to the process, allowing the controller itself to calculate optimal tuning values.Other formulas are available to tune the loop according to different performance criteria.4 Modifications to the PID algorithmThe basic PID algorithm presents some challenges in control applications that have been addressed by minor modifications to the PID form.One common problem resulting from the ideal PID implementations is integralwindup. This can be addressed by:Initializing the controller integral to a desired valueDisabling the integral function until the PV has entered the controllable region Limiting the time period over which the integral error is calculatedPreventing the integral term from accumulating above or below pre-determined boundsMany PID loops control a mechanical device (for example, a valve). Mechanical maintenance can be a major cost and wear leads to control degradation in the form of either stiction or a deadband in the mechanical response to an input signal. The rate of mechanical wear is mainly a function of how often a device is activated to make a change. Where wear is a significant concern, the PID loop may have an output deadband to reduce the frequency of activation of the output (valve). This is accomplished by modifying the controller to hold its output steady if the changewould be small (within the defined deadband range). The calculated output must leave the deadband before the actual output will change.The proportional and derivative terms can produce excessive movement in the output when a system is subjected to an instantaneous "step" increase in the error, such as a large setpoint change. In the case of the derivative term, this is due to taking the derivative of the error, which is very large in the case of an instantaneous step change.5. Limitations of PID controlWhile PID controllers are applicable to many control problems, they can perform poorly in some applications.PID controllers, when used alone, can give poor performance when the PID loop gains must be reduced so that the control system does not overshoot, oscillate or "hunt" about the control setpoint value. The control system performance can be improved by combining the feedback (or closed-loop) control of a PID controller with feed-forward (or open-loop) control. Knowledge about the system (such as the desired acceleration and inertia) can be "fed forward" and combined with the PID output to improve the overall system performance. The feed-forward value alone can often provide the major portion of the controller output. The PID controller can then be used primarily to respond to whatever difference or "error" remains between the setpoint (SP) and the actual value of the process variable (PV). Since the feed-forward output is not affected by the process feedback, it can never cause the control system to oscillate, thus improving the system response and stability.For example, in most motion control systems, in order to accelerate a mechanical load under control, more force or torque is required from the prime mover, motor, or actuator. If a velocity loop PID controller is being used to control the speed of the load and command the force or torque being applied by the prime mover, then it is beneficial to take the instantaneous acceleration desired for the load, scale that value appropriately and add it to the output of the PID velocity loop controller. This means that whenever the load is being accelerated or decelerated, a proportional amount of force is commanded from the prime mover regardless of the feedback value. The PID loop in this situation uses the feedback information to effect any increase or decrease of the combined output in order to reduce the remaining difference between theprocess setpoint and thefeedback value. Working together, the combined open-loop feed-forward controller and closed-loop PID controller can provide a more responsive, stable and reliable control system.Another problem faced with PID controllers is that they are linear. Thus, performance of PID controllers in non-linear systems (such as HV AC systems) is variable. Often PID controllers are enhanced through methods such as PID gain scheduling or fuzzy logic. Further practical application issues can arise from instrumentation connected to the controller. A high enough sampling rate, measurement precision, and measurement accuracy are required to achieve adequate control performance.A problem with the Derivative term is that small amounts of measurement or process noise can cause large amounts of change in the output. It is often helpful to filter the measurements with a low-pass filter in order to remove higher-frequency noise components. However, low-pass filtering and derivative control can cancel each other out, so reducing noise by instrumentation means is a much better choice. Alternatively, the differential band can be turned off in many systems with little loss of control. This is equivalent to using the PID controller as a PI controller.6. Cascade controlOne distinctive advantage of PID controllers is that two PID controllers can be used together to yield better dynamic performance. This is called cascaded PID control. In cascade control there are two PIDs arranged with one PID controlling the set point of another. A PID controller acts as outer loop controller, which controls the primary physical parameter, such as fluid level or velocity. The other controller acts as inner loop controller, which reads the output of outer loop controller as set point, usually controlling a more rapid changing parameter, flowrate or accelleration. It can be mathematically proved that the working frequency of the controller is increased and the time constant of the object is reduced by using cascaded PID controller.[vague]7. Physical implementation of PID controlIn the early history of automatic process control the PID controller was implemented as a mechanical device. These mechanical controllers used a lever, spring and a mass and were often energized by compressed air. These pneumatic controllers were once the industry standard.Electronic analog controllers can be made from a solid-state or tube amplifier, a capacitor and a resistance. Electronic analog PID control loops were often found within more complex electronic systems, for example, the head positioning of a disk drive, the power conditioning of a power supply, or even the movement-detection circuit of a modern seismometer. Nowadays, electronic controllers have largely been replaced by digital controllers implemented with microcontrollers or FPGAs.Most modern PID controllers in industry are implemented in software in programmable logic controllers (PLCs) or as a panel-mounted digital controller. Software implementations have the advantages that they are relatively cheap and are flexible with respect to the implementation of the PID algorithm.8.Alternative nomenclature and PID forms8.1 PseudocodeHere is a simple software loop that implements the PID algorithm:8.2 Ideal versus standard PID formThe form of the PID controller most often encountered in industry, and the one most relevant to tuning algorithms is the "standard form". In this form the Kp gain is applied to the Iout, and Dout terms, yielding:WhereTi is the Integral TimeTd is the Derivative TimeIn the ideal parallel form, shown in the Controller Theory sectionthe gain parameters are related to the parameters of the standard formthroughand Kd = KpTd. This parallel form, where the parameters are treated as simple gains, is the most general and flexible form. However, it is also the form where the parameters have the least physical interpretation and is generally reserved for theoretical treatment of the PID controller. The "standard" form, despite being slightly more complex mathematically, is more common in industry.8.3Laplace form of the PID controllerSometimes it is useful to write the PID regulator in Laplace transform form:Having the PID controller written in Laplace form and having the transfer function of the controlled system, makes it easy to determine the closed-loop transfer function of the system.8.4Series / interacting formAnother representation of the PID controller is the series, or "interacting" form. This form essentially consists of a PD and PI controller in series, and it made early (analog) controllers easier to build. When the controllers later became digital, many kept using the interacting form.[edit] ReferencesLiptak, Bela (1995). Instrument Engineers' Handbook: Process Control. Radnor, Pennsylvania: Chilton Book Company, 20-29. ISBN 0-8019-8242-1.Van, Doren, Vance J. (July 1, 2003). "Loop Tuning Fundamentals". Control Engineering. Red Business Information.Sellers, David. An Overview of Proportional plus Integral plus Derivative Control and Suggestions for Its Successful Application and Implementation (PDF). Retrieved on 2007-05-05.Articles, Whitepapers, and tutorials on PID controlGraham, Ron (10/03/2005). FAQ on PID controller tuning. Retrieved on2007-05-05.PID控制器比例积分微分控制器(PID调节器)是一个控制环,广泛地应用于工业控制系统里的反馈机制。
智能控制系统毕业论文中英文资料对照外文翻译文献
controlled object, as intelligent load monitoring test, is the use of single-chip I / O port output signal of relay control, then the load to control or monitor, thus similar to any one single chip control system structure, often simplified to input part, an output part and an electronic control unit ( ECU )
information, which can more effectively assist the security personnel to deal with the crisis, and minimize the damage and loss, it has great practical significance, some risk homework, or artificial unable to complete the operation, can be used to realize intelligent device, which solves a lot of artificial can not solve the problem, I think, with the development of the society, intelligent load in all aspects of social life play an important reuse.
脉宽调制器与通用定时器中英文对照外文翻译文献

中英文资料外文翻译文献(文档含英文原文和中文翻译)ARM Cortex-M3脉宽调制器(PWM)与通用定时器1.PWM脉宽调制(PWM)是一项功能强大的技术,它是一种对模拟信号电平进行数字化编码的方法。
在脉宽调制中使用高分辨率计数器来产生方波,并且可以通过调整方波的占空比来对模拟信号电平进行编码。
PWM通常使用在开关电源(switching power)和电机控制中。
StellarisPWM模块由3个PWM发生器模块1个控制模块组成。
每个PWM 发生器模块包含1个定时器(16位递减或先递增后递减计数器),2个PWM比较器,PWM信号发生器,死区发生器和中断/ADC-触发选择器。
而控制模块决定了PWM 信号的极性,以及将哪个信号传递到管脚。
每个PWM发生器模块产生两个PWM信号,这两个PWM信号可以是独立的信号(基于同一定时器因而频率相同的独立信号除外),也可以是一对插入了死区延迟的互补(complementary)信号。
这些PWM发生模块的输出信号在传递到器件管脚之前由输出控制模块管理。
StellarisPWM模块具有极大的灵活性。
它可以产生简单的PWM信号,如简易充电泵需要的信号;也可以产生带死区延迟的成对PWM信号,如供半-H桥(half-H bridge)驱动电路使用的信号。
3个发生器模块也可产生3相反相器桥所需的完整6通道门控。
PWM定时器每个PWM发生器的定时器都有两种工作模式:递减计数模式或先递增后递减计数模式。
在递减计数模式中,定时器从装载值开始计数,计数到零时又返回到装载值并继续递减计数。
在先递增后递减计数模式中,定时器从0开始往上计数,一直计数到装载值,然后从装载值递减到零,接着再递增到装载值,依此类推。
通常,递减计数模式是用来产生左对齐或右对齐的PWM信号,而先递增后递减计数模式是用来产生中心对齐的PWM信号。
PWM定时器输出3个信号,这些信号在生成PWM信号的过程中使用:方向信号(在递减计数模式中,该信号始终为低电平,在先递增后递减计数模式中,则是在低高电平之间切换);当计数器计数值为0时,一个宽度等于时钟周期的高电平脉冲;当计数器计数值等于装载值时,一个宽度等于时钟周期的高电平脉冲。
AM调制器英文文献
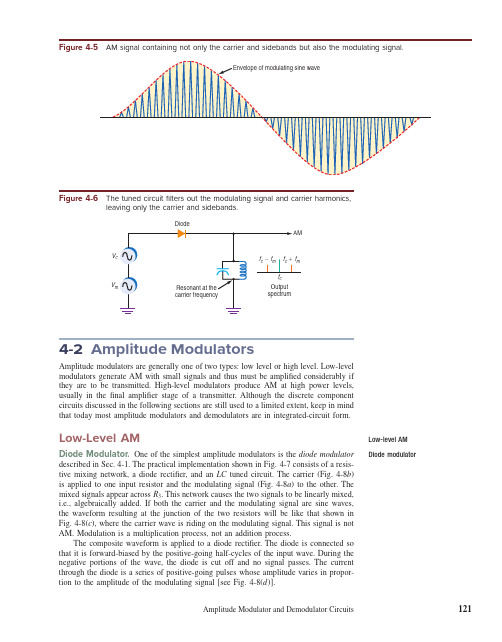
4-2 Amplitude ModulatorsAmplitude modulators are generally one of two types: low level or high level. Low-level modulators generate AM with small signals and thus must be amplii ed considerably if they are to be transmitted. High-level modulators produce AM at high power levels, usually in the i nal amplii er stage of a transmitter. Although the discrete component circuits discussed in the following sections are still used to a limited extent, keep in mind that today most amplitude modulators and demodulators are in integrated-circuit form.Low-Level AMDiode Modulator. One of the simplest amplitude modulators is the diode modulator described in Sec. 4-1. The practical implementation shown in Fig. 4-7 consists of a resis-tive mixing network, a diode rectii er, and an LC tuned circuit. The carrier (Fig. 4-8b) is applied to one input resistor and the modulating signal (Fig. 4-8a) to the other. The mixed signals appear across R3. This network causes the two signals to be linearly mixed, i.e., algebraically added. If both the carrier and the modulating signal are sine waves, the waveform resulting at the junction of the two resistors will be like that shown in Fig. 4-8(c), where the carrier wave is riding on the modulating signal. This signal is not AM. Modulation is a multiplication process, not an addition process.The composite waveform is applied to a diode rectii er. The diode is connected so that it is forward-biased by the positive-going half-cycles of the input wave. During the negative portions of the wave, the diode is cut off and no signal passes. The current through the diode is a series of positive-going pulses whose amplitude varies in propor-tion to the amplitude of the modulating signal [see Fig. 4-8(d)].Low-level AM Diode modulatorFigure 4-5 A M signal containing not only the carrier and sidebands but also the modulating signal.Figure 4-6 T he tuned circuit fi lters out the modulating signal and carrier harmonics,l eaving only the carrier and sidebands.VV cThese positive-going pulses are applied to the parallel-tuned circuit made up of L and C , which are resonant at the carrier frequency. Each time the diode conducts, a pulse of current l ows through the tuned circuit. The coil and capacitor repeatedly exchange energy, causing an oscillation, or “ringing,” at the resonant frequency. The oscillation of the tuned circuit creates one negative half-cycle for every positive i nput pulse. High-amplitude positive pulses cause the tuned circuit to produce high- a mplitude negative pulses. Low-amplitude positive pulses produce corresponding low-amplitude negative pulses. The resulting waveform across the tuned circuit is an AM signal, as Fig. 4-8(e ) illustrates. The Q of the tuned circuit should be high enough to eliminate the harmonics and produce a clean sine wav e and to i lter out the modulating signal, and low enough that its bandwidth accommodates the sidebands g enerated.Figure 4-7 Amplitude modulation with a diode.Fig. 4-8(e )AM R Figure 4-8 W aveforms in the diode modulator. (a ) Modulating signal. (b ) Carrier. (c ) Linearly mixed modulating signal and carrier. (d ) Positive-going signal after diode D 1. (e ) Am output signal.(a )(b )(c )(d )(e )This signal produces high-quality AM, but the amplitudes of the signals are critical to proper operation. Because the nonlinear portion of the diode’s characteristic curve occurs only at low voltage levels, signal levels must be low, less than a volt, to produce AM. At higher voltages, the diode current response is nearly linear. The circuit works best with millivolt-level signals.Transistor Modulator.An improved version of the circuit just described is shown in Fig. 4-9. Because it uses a transistor instead of the diode, the circuit has gain. The emitter-base junction is a diode and a nonlinear device. Modulation occurs as described previously, except that the base current controls a larger collector current, and there-fore the circuit amplii es. Rectii cation occurs because of the emitter-base junction. This causes larger half-sine pulses of current in the tuned circuit. The tuned circuit oscillates (rings) to generate the missing half-cycle. The output is a c lassic AM wave. Dif erential Amplifi er. A differential amplii er modulator makes an excellent ampli-tude modulator. A typical circuit is shown in Fig. 4-10(a). Transistors Q1 and Q2 form the differential pair, and Q3 is a constant-current source. Transistor Q3 supplies a i xed emitter current I E to Q1 and Q2, one-half of which l ows in each transistor. The output is developed across the collector resistors R1 and R2.The output is a function of the difference between inputs V1 and V2; that is, V out5A(V22V1), where A is the circuit gain. The amplii er can also be operated with a single input. When this is done, the other input is grounded or set to z ero. In Fig. 4-10(a), if V1 is zero, the output is V out5A(V2). If V2 is zero, the output is V out5 A(2V1)52AV1. This means that the circuit inverts V1.The output voltage can be taken between the two collectors, producing a balanced, or differential, output. The output can also be taken from the output of either collector to ground, producing a single-ended output. The two outputs are 180° out of phase with each other. If the balanced output is used, the output voltage across the load is twice the single-ended output voltage.No special biasing circuits are needed, since the correct value of collector current is supplied directly by the constant-current source Q3 in Fig. 4-10(a). Resistors R3, R4, and R5, along with V EE, bias the constant-current source Q3. With no inputs applied, the current in Q1 equals the current in Q2, which is I E/2. The balanced output at this time is z ero. The circuit formed by R1 and Q1 and R2 and Q2 is a bridge circuit. When no inputs are applied, R1 equals R2, and Q1 and Q2 conduct equally. Therefore, the bridge is balanced and the output between the collectors is zero.Transistor modulator Differential amplifi er modulatorBridge circuitFigure 4-9 Simple transistor modulator.CarriersignalFigure 4-10 (a) Basic dif erential amplifi er. (b) Dif erential amplifi er modulator.ϪV EE(b)Now, if an input signal V1 is applied to Q1, the conduction of Q1 and Q2 is affected. Increasing the voltage at the base of Q1 increases the collector current in Q1 and decreases the collector current in Q2 by an equal amount, so that the two currents sum to I E. Decreasing the input voltage on the base of Q1 decreases the collector current in Q1 but increases it in Q2. The sum of the emitter currents is always equal to the current supplied by Q3.The gain of a dif ferential amplii er is a function of the emitter current and the value of the collector resistors. An approximation of the gain is given by the expression A5R C I E/50. This is the single-ended gain, where the output is taken from one of the collectors with respect to ground. If the output is taken between the collectors, the gain is two times the above value.ResistorR C is the collector resistor value in ohms, and I E is the emitter current in milliamperes. If R C5R15R254.7 k V and I E51.5 mA, the gain will be about A54700(1.5)y5057050/505141.In most differential amplii ers, both R C and I E are i xed, providing a constant gain. But as the formula above shows, the gain is directly proportional to the emitter current. Thus if the emitter current can be varied in accordance with the modulating signal, the circuit will produce AM. This is easily done by changing the circuit only slightly, as in Fig. 4-10(b). The carrier is applied to the base of Q1, and the base of Q2 is grounded. The output, taken from the collector of Q2, is single-ended. Since the output from Q1 is not used, its collector resistor can be omitted with no effect on the circuit. The modulating signal is applied to the base of the constant-current source Q3. As the intelligence signal varies, it varies the emit-ter current. This changes the gain of the circuit, amplifying the carrier by an amount deter-mined by the m odulating signal amplitude. The result is AM in the output.This circuit, like the basic diode modulator, has the modulating signal in the output in addition to the carrier and sidebands. The modulating signal can be removed by using a simple high-pass i lter on the output, since the carrier and sideband frequencies are usually much higher than that of the modulating signal. A bandpass i lter centered on the carrier with sufi cient bandwidth to pass the sidebands can also be used. A parallel-tuned circuit in the collector of Q2 replacing R C can be used.The differential amplii er makes an excellent amplitude modulator. It has a high gain and good linearity, and it can be modulated 100 percent. And if high-frequency t ransistors or a high-frequency IC differential amplii er is used, this circuit can be used to produce low-level modulation at frequencies well into the hundreds of megahertz. MOSFETs may be used in place of the bipolar transistors to produce a similar result in ICs. Amplifying Low-Level AM Signals.In low-level modulator circuits such as those discussed above, the signals are generated at very low voltage and power amplitudes. The voltage is typically less than 1 V, and the power is in milliwatts. In systems using low-level modulation, the AM signal is applied to one or more linear a mplii ers, as shown in Fig. 4-11, to increase its power level without distorting the signal. These amplii er c ircuits—class A, class AB, or class B—raise the level of the signal to the desired power level before the AM signal is fed to the antenna.High-Level AMIn high-level AM, the modulator varies the voltage and power in the i nal RF amplii er stage of the transmitter. The result is high efi ciency in the RF amplii er and overall high-quality performance.Collector Modulator. One example of a high-level modulator circuit is the c ollector modulator shown in Fig. 4-12. The output stage of the transmitter is a high-power class C amplii er. Class C amplii ers conduct for only a portion of the positive half-cycle of their input signal. The collector current pulses cause the tuned circuit to oscillate (ring) at the desired output frequency. The tuned circuit, therefore, reproduces the negative portion of the carrier signal (see Chap. 7 for more details).High-level AMCollector modulator GOOD TO KNOW Differential amplifi ers makee xcellent amplitude modulators because they have a high gain and good linearity and can be 100 percent modulated.。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字调制解调技术中英文资料外文翻译文献英文文献Technology of digital modulation and demodulation plays a important role in digital communication system, the combination of digital communication technology and FPGA is a certainly trend . With the development of software radio, the requirement for technology of modulation and demodulation is higher and higher. This paper starts with studying digital modulation and demodulation theory at first, and analyses basic principle of three kinds of important modulation and demodulation way ( FSK, MSK, GMSK ).The Rohde &Schwarz SME03, Signal Generator, provides AM modulation and External FSK digital modulation required for the development and testing of digital mobile radio receivers.The application of PWM in digital modulation and demodulation for analog communication signals in several modulation modes Research results prove that the design of digital IF modulator and demodulator of Software Radio appeases the capability and requirement of Software Radio.A transfusion speed monitor system is designed based on infrared technology with modulation and demodulation.It'sthe combination of modulator and demodulator.Time synchronization that is key technology of digital demodulation is cc allied by software.The paper provides the design of hardware of digital IF modulator and demodulator of Software Radio which includes Digital Signal Processor、Micro Control Unit and AD/DA convertor etc.Digital Down/Up Converter(DDC/DUC), modulation and demodulation are discussed in the dissertation as some essencial parts of SDR platform. Two Way Automatic Communication System(TWACS) is a new valuable communication technology for distribution networks,which has special of modulation and demodulation. In this paper, we study the OFDM technology based on 802.16a, realize the baseband modulation and demodulation by using TMS320C6201, and optimize the software module. The paper introduces the principle of QPSK modulation and demodulation, the circuit are also be realized based on FPGA.With the improvement of the technology, especially in the fields such as computer technology , data coding and compress , digital modulation and VLSI, the world electronic information industry enter into the digital era. First, the features of fax communication and the mode of modulation and demodulation are described.In automatic classification of digital modulation signal,computing envelope variance after difference has important meaning to distinguish PSK and FSK signal.The science and technology of space flight.The effect on modulation and demodulation of QPSK via carrier phase noise can not be ignored, and it is difficult to analyze.Digital modulation error parameters, such as error vector magnitude EVM, isimportant in test and measurement of information system. This paper introduces the technology research progress in the metrology of digital modulation error parameters. First, we point out the basic problems existing in the field, which is about traceability and parameter range of calibration, and describe the relevant research, such as the thinking and technology of the `RF waveform metrology'. Then, we highlight the research progress of our team: 1). The metrology method and system for digital demodulation error parameter based on CW combination, which fits BPSK, QPSK, 8PSK, 16QAM, 64QAM modulation: this method can achieve traceability and error setting ability in a wide range, when standard EvmRms is 1.585%, the expanded uncertainty (k=2) is 0.009%. 2). The metrology method and system for digitaldemodulation error parameter based on analog AM or PM. 3). The metrology method and system for digital demodulation error parameter based on IQ gain imbalance and phase imbalance. 4). The metrology method and system for digital demodulation error parameter based on analog PM in the aspect of GMSK and FSK modulation. 5). The metrology method and system for digital demodulation error parameter based on Baseband waveform design. Based on these methods, our proposal are given as follows: first, establish public metrology standard for digital modulation error parameters; second, develop a new type of instrument "vector signal analyzer calibrator".In this paper, we propose a novel method of chaotic modulation based on the combination of Chaotic Pulse Position Modulation (CPPM) and Chaotic Pulse WidthModulation (CPWM). This combination looks very promising for theimprovement of information privacy in chaos-based digital communications. In the CPPM+CPWM method, each pulse is a chaotic symbol which carries binary information of two bits corresponding to its position and width, where the position is determined by the interval between rising edge of the current pulse compared to the previous one and the width is determined by the duration between the rising edge and the falling edge of the same pulse. This offers the increase of bit rate, bandwidth efficiency and privacy in comparison with the method of CPPM. The schemes of Modulation andDemodulation (MoDem) of CPPM+CPWM are proposed, designed and analyzed that based on the conventional schemes of CPPM. The numerical simulation in time domain of the system of CPPM+CPWM MoDem is implemented in Matlab/Simulink. It gives a summary of theoretical and practical studies on the properties of pulse-phase modulation, developed mainly in 1943. The properties of pulse-phasemodulation are studied by means of Fourier transformations. Although some approximations are introduced, the calculations lead to the following definite conclusions: (1) Pulse-phase modulation introduces no amplitude distortion except at sub-multiples of the recurrent frequency. (2) The harmonic distortion, if any, is negligible and this method of modulation can be used for high-quality broadcasting. (3) Pulse-phase modulation is subject to a special type of distortion called ?cross-distortion,? produced by side bands of the recurrent frequency appearing in the signal bandwidth. Curves of the approximate amount of this type of distortion are given, and it is shown that, in practical multi-channel systems, this distortion is negligible,provided that the recurrent pulse frequency is at least double the highest signal frequency to be transmitted, and preferably equal to, or greater than, three times this frequency. This study is followed by considerations on the signal/noise ratio in pulse-phase modulation. Pulse-phasemodulation is compared with amplitude modulation and a formula, giving the improvement in the signal/noise ratio due to pulse-phase modulation, is established by very simple considerations. It is shown that this ratio improves as the frequency bandwidth used in pulse-phase modulation. It is shown how an improvement of 3 db in signal/noise ratio can be obtained by suppressing the noise on the synchronizing pulse, and a practical circuit developed and applied in 1943 by the author is described. Finally, a typical example of pulse technique is given. In practical circuits the modulator and demodulator pulses are not perfectly shaped, because of the departure from linearity due to finite time-constants. This introduces harmonic distortion. It is shown how this distortion can be practically elimi- nated by designing circuits so that the time constant is equal at modulationand demodulation.It present a novel technique for digital data modulation and demodulationcalled triangular modulation (TM). The modulation technique was developed primarily to maximize the amount of data sent over a limited bandwidth channel while still maintaining very good noise rejection and signal distortion performance. Themodulation technique involves breaking digital data into a series of parallel words. Each word is then represented by one half period of a triangular waveform whose slope is proportional to the value of the parallelword it represents. Thedemodulation technique for this uniquely defined waveform involves first digitizing the waveform at a higher constant sampling rate.A linear regression algorithm using the method of least squares is then used to compute the slope of the digitized waveform to a very high precision. This process is repeated for each rising and falling edge of the triangular modulated waveform. All encoded data is extracted by precise slope computation since each slope uniquely defines the encoded data word it represents. The ability of the demodulation algorithm to compute the exact slope of the modulated waveform determines how many bits can be represented by the modulated waveform. Transmission channel bandwidth limitations determine the allowable range of slopes used. Several simulations are performed to provide a sample of how the modulation method will perform in various real world environments. The paper also discusses several application areas where themodulation technique will provide superior results over other modulation methods.The theory of constant envelope orthogonal frequency division multiplexing (CE-OFDM) is analyzed in this paper, along with the introduction of the implementation method of CE-OFDM technique. Besides, the modulation and demodulation process is simulated and analyzed. And the results indicate that CE-OFDM conducts phasemodulation on the basis of OFDM modulation. Thus, FFT/IFFT is implemented in the transmitting and receiving terminals. Furthermore, the method of equalization applied in the demodulation process can optimize system performance. And also, CE-OFDM solves the problem of high peak-to-average power ratio (PAPR) in OFDM, reducing PAPR to 0Db.High efficient modulation technology is a hot research topic. UNB modulation, for its good performance, is paid to more attention. First, the article introduces EBPSK modulation scheme as UNB modulation method, gives its time and frequency domain characteristics and presents its optimized form in the same time, which can lower the sideband power level, while keeping the modulation information un-lost. Then, filter design is discussed about two zero and two pole digital filter, which shows narrower bandwidths and a fast response speed to the EBPSK based UNB modulated signals, although the filter bandwidth is much narrower, the modulationinformation still can be seen after the modulated signals filtered using it. Last, simulation is done about EBPSK based UNB modulation and demodulation, and experimental results show that EBPSK based UNB modulation has high bandwidth efficiency and a good, even better BER performance using the filters.中文译文数字调制解调技术在数字通信中占有非常重要的地位,数字通信技术与FPGA 的结合是现代通信系统发展的一个必然趋势。