ENVI主菜单中英文对照
Imageware中英文菜单对照
Imageware中英文菜单对照File-文件Open Ctrl+O 打开Save Alt+S存盘Save as 另存为Autosave File 自动存盘Hardcopy硬C opyScreen Dump PostScript Output Copy to Clipbord 复制到剪贴板Error Needle Report Dimension Report尺寸报表View Log File 查看注册文件Import Sketch 读入草图ExitAlt+X退出Edit-编辑Layer Manager 层的管理Create Group G 创建群组UngroupShift+U 删除群组Undo Hide Entity Ctrl+Z 撤消隐藏的实面RedoShift+Z 恢复Undo/Redo History 回退/恢复历史纪录Undo TransformCtrl+Shift+U 回退变换Repeat Last Operation Ctrl+Shift+Z 重复最后一次操作Delete All Ctrl+U删除所有Cut 剪切Copy 复制Paste粘贴Change Entity Name 更改实面名Empty Trash Preferance优先选择-系统设置Import/Export 输入/输出System系统Error Range Setting 错误范围的设置Restore Defaulte恢复默认值Enable Screen Updates 屏幕更新Open CommandLine打开命令行Display-显示Entity Color 实体颜色(实体:点,线,面;这个功能基本上在站版面,层中可以操作,点云右键修改点色彩)Point点Display Ctrl+D点的显示模式Mosaic 点云多色显示,区分点云数目Scatter Polyline Polygon Mesh 三角网格这个指令自动把点云的显示方式改为圆状&多义线Gouraud -Shaded反光着色Hide All Ctrl+H隐藏全部Show All Ctrl+S显示全部Just Show Selected Ctrl+J只显示选择部分Remove Cloud Colors取消点云颜色Remove Cloud Errors取消点云错误部分Remove Cloud Curvature取消点云曲率Curve曲线Display Ctrl+Shift+D曲线的显示模式Mosaic不同颜色显示Show All Endpoints资料的头尾端显示Show All Directions显示方向Show All Knots显示节点Hide All Ctrl+Shift+H隐藏全部曲线Show All Ctrl+Shift+S显示全部曲线Just Show Selected Ctrl+Shift+J只显示选择部分Hide All 3D Curves隐藏全部3D曲线Show All 3D Curves显示全部3D曲线Hide All Surface Curves隐藏全部2D曲线Show All Surface Curves显示全部2D曲线Surface曲面Display Shift+D曲面的显示模式Mosaic合并Boundaries边界, 分界线Iso-LinesShaded渲染显示Show Shaded Model阴影显示Show Knots显示节点Hide All Shift+H隐藏全部Show All Shift+S显示全部Just Show Selected Shift+J只显示选择部分Coordinate System 坐标系Dimension尺寸Display显示尺寸Rescale Dimensions重新调整尺寸Show All显示全部Hide All隐藏全部Group组Display Alt+Shift+D显示Mosaic合并Hide All Alt+Shift+H隐藏全部Show All Alt+Shift+S显示全部Just Show Selected Alt+Shift+J只显示选择部分Label标签Display显示Hide All隐藏全部Show All显示全部Just Show Selected只显示选择部分Show Point Labels显示点标注Hide Point Labels隐藏点标注Plot矢量图Display显示Deviation背离Mosaic合并Hide All Plots Ctrl+Shift+M隐藏Hide All Color Maps Shift+M隐藏所有颜色图Name实面名Show All Names Shift+N显示全部名称Hide All Names Ctrl+Shift+N隐藏全部名称Show Selected Names只显示选择名称Put In No Show选择要隐藏的Toggle Show/No Show套选要隐藏的Show Only Selected 只显示选择部分Visibility可见性Make Invisible Ctrl+WMake All visible Shift+WMake Selected visible Ctrl+Shift+WSet Lights设置灯光Set Reflection Point设置镜像点Enhanced Display增强的显示Mirror Display对称显示Depth Cue等高线显示Perspactive Shift+V 透视图显示Field Of View空间显示Clipping Planes平面剪切View-视图Open Viewport打开视图Viewport Layout窗口布局Single Viewport Ctrl+1单视图Standard 4 Views Ctrl+4标准4视图Automotove View Arl+4自动视图Tile Views显示视图标题名Cascade Views层叠视图Define Views定义视图Top顶视图Bottom下视图Front前视图Back后视图Left左视图Right右视图Isometric等视图Restore User Views恢复用户视图Flip View视图掉换Save View保存视图Delete View(s)删除视图Change View Name更改视图名称Show Grid显示网格Show Viewport Ruler显示视图标尺转换视图到非标准平面(以利作图)Align View toDirection矢量方向Cloud点云Curves曲线Surface表面Points点Coordinate System等轴系统Dimension尺寸Fill Screen Ctrl+F满屏幕显示Center Around Point确定视图中心点Rotate旋转WorldAround Center Of MessAround PointAround Vector5平移WorldAlong View PlaneAlong VectorZoom放大In Boundary Ctrl+A框选放大Magnify Box放大框Non-Proporttional Shift+ANon-Proporttional AspectToggle ProporttionReset Non-Proporttional Ctrl+Shift+AIn UpOut DownBy PercentageZoom FactorCreate-建立3D Curve3D 曲线3D B-Spline3D B-曲线Control Points控制点3D Polyline创建3D B样条Curve Primitive创建几何曲线Line直线Interactive Circle在目前视角绘制圆Arc圆弧Circle圆Ellipse椭圆Rectangle矩形Slot沟槽Polygon多边形Arc w/3 Points以3点建构圆弧Arc w/Center and 2 Points以2点+圆心建弧Arc w/2 Points and RadiusCircle w/3 Points3点建圆Circle w/Center and 2 Points2点+圆心建一圆Circle w/2 Points and Radius圆-3点加半径Surface Primitive 创建几何曲面Plane平面Cylinder圆柱面Sphere球面Cone圆锥面Surfacer w/4 Points平面-4点Plane w/3 Points平面-3点Cylinder w/Centers and Point圆柱面-中心,点Sphere w/4 Points球面-4点Sphere w/Centers and Point球面-中心,点Cone w/Centers and 2 Point圆锥面-中心,2点Plane Set平行平面设置Polygon Primitive创建网格Box盒状物Cylinder圆柱Cone圆锥Sphere球Points Ctrl+Shift+A点Annontation创建标注Text Label文本标注Dimension Label尺寸标注Set Point Labels设置点标注Delete Point Labels删除点标注Linear Dimension长度尺寸标注Angular Dimension角度尺寸标注Radial Dimension半径尺寸标注Modify Dimension修改尺寸标注Quadric Label二次曲面标注Error Needle Label公差标注Min/Max Needle LabelConstruction Line参考线Perpendicular Line垂直线Tangent Line相切线Infinite line无限直线Lines Between 2 Line角平分线Coordinate System坐标系统Create建立新的坐标系Form XformTranslate平移Rotate旋转Change Active更改激活Work Plane工作平面Create生成Settings设置Tolerance公差Point点Line直线Circle圆Ellipse椭圆Slot沟槽Retangle矩形Polygon多边形Plane平面Cylinder圆柱面Sphere球面Cone圆锥面Construct-构造Surface Form Cloud由点云构造曲面Uniform Surface Shift+F自由曲面Cylindrical Surface w/Curve点云+曲线形成圆柱面Interpolate Surface通过特定点的曲面Fit Plane拟合为平面Fit Cylinder合适的圆柱面Fit Sphere拟合为球面Fit Cone拟合为圆锥面Surface曲面Bi-Directional LoftLoft放样曲面Surface by Boundary由边界创建曲面Fit w/cloud and Curves点云和边界线拟合曲面Blend UV Curve Network U、V方向曲线生成曲面Surface of Revolution旋转曲面Plane Trimmed w/Curves由修剪曲线建立平面Swept Surface 扫掠曲面Ruled规则曲面Sweep扫掠曲面Extrude in Direction沿某方向延伸曲面Tube管状曲面Flange边缘Flange Surface曲面边缘,凸缘曲面Flange Surface (Tangent)曲面边缘(相切)Blend混和,桥接Curve混成曲线,桥接曲线Surface混成曲面,桥接曲面Fillet倒角Curve曲线倒角Arc w/Tangent to Curve与曲线相切的圆弧Dynamic Arc Fit动态弧形倒角Surface曲面倒角Curve to Surface曲线与曲面倒角Radius Between Curve设定半径范围的曲线倒角Offset偏移cloud点云的偏移Polygon Mesh网格面的偏移Curve曲线的偏移Surface曲面的偏移Cross Section点群资料撷取剖面资料STL Slices in Z截面为Z平面Simulate STL Slices模拟STL截面Cut STL Slices in Z w/SurfaceCloud Parallel Ctrl+B创建平行剖切截面Cloud Circular创建放射状剖切截面Cloud Interactive任意方面的剖切截面Cloud Curve Aligned沿着曲线方向剖切截面Curve Points对曲线切剖面Surface Points对曲面切剖面Surface Shift+B对曲面剖切产生的截面Surface Cloud同时对曲面和点云剖切Intersection相交线与交点With Curves曲线的相交点With Surfaces曲面相交线With Planes平面的交线Curve on Surface曲面上的曲线Surface Boundary to Curve曲面边界转为曲线Isoparametric Curve曲面边界转为2D曲线Project Curve to Surface投影曲线到曲面Interactive B-Spline建构B-Spline曲线Interactive Polyline建立波折线Curve Form Cloud曲线来之点云Fit Line建立直线Fit Arc建立圆弧Fit Circle建立圆Fit Ellipse建立椭圆Fit Retangle建立矩形Fit Slot建立沟槽Fit Polygon建立多边形Fit Curve建立曲线Fit PrimitiveUniform Curve Ctrl+Shift+F均匀曲线Tolerance Curve基于公差的曲线Uniform,Based on Curve按各点均匀形成曲线Tolerance,Based on Curve按公差形成曲线Interpolate Curve直接通过点云Bounding Circle计算点云边界圆Curve On CloudCurve Form Surface曲线来之曲面Surface Boundary to Curve曲面边界线Isoparametric Curve曲面向量线Surface Curve to 3D Curve曲面上之曲线Line Form Cylinder/Cone Axis建立圆柱或圆锥轴线Feature Line特征线Sharp Edges点云特征撷取Color Based按颜色提取点云Points点群Sample Polygon Centers提取三角形中心Average Point Clouds同两笔点云资料求平均点群Sample Curve由曲线产生点群project Curve on Cloud曲线投影到点云project Curve on Surface曲线投影到曲面Sample Surface由曲面取样产生点群Tool Compensate补偿工具Sample Plot提取图Polygons多边形Pick Polygons拾取多边形Pick Vertices for Polygons拾取多边形顶点Pick Points for Polygons拾取三角形的点Polygon Mesh多边形网格Polygonize Cloud点云多边形化Poly Form Surface多边形来自曲面Poly Form Surface ClosePoly Form Surface TolPoly Form Surface Tol ClosePolygonal T ooling多边形的加工Planar mold平面模型mold Form Curve模型来自曲线mold Form Surface模型来自曲面User Defined MoldCore DefinitionSignature ExtensionIce StructuresCreate Drain HoldModify-修改Control Points控制点Global Model点群整体不等比变形Clouds点云的整体调整Surfaces曲面的整体调整Rotate Surfaces旋转曲面Continuity连续性Create Constraint(s)建立曲线的约束关系Modify Constraint(s)修改约束关系Delete Constraint(s)删除约束关系Snap Curve to Curves固定曲线间的交点Match 2 Curves连接2个曲线Match Surface缝合两个曲面Match To Curves曲面连接至曲线上Match T Junction(3)缝合T形边界(3边)Match 4 Boundaries曲面与其他4个边连接曲面Match T Junction(4)缝合T形边界(4边)Make Edge Curvature Symmetric两曲面边界曲率一致Global Match配置球形Parameterization参数化Subdivide Polygons详细划分多边形Convert Order改变阶数Reparameterize Curve重新参数化曲线Insert/Remove Knot(s)插入/删除节点Insert/Remove Control Point(s)插入/删除控制点Redistribute Curve Knots重新分布曲线控制点位置Reparameterize Surface重新定义曲面控制点数Redistribute Surface Control Points重新分布控制点位置Insert Surface Knot插入曲面节点Remove Surface Knot删除曲面节点Convert Surface to Bezier转换成Bezier曲面Shape Control外形, 形状的控制Cloud Planarize点云平面化Change Curve Tangent Vector更改曲面切线方向Curve Planarize曲线的平面化Inflection Removal变形移动Pass curve through point经过曲线切线的点Curve curvature曲线曲率modify surface point更改曲面上的点Pass Surface Through Curve经过曲面切向的点Wrap Surface to Cloud限制曲线与点云距离Wrap Surface to Cloud w/Tolerance限制曲线与点云公差范围Multi-SurfaceWrp to CloudSurface Isoparm Planarize将曲面UV控制点移至特定平面Insert/Remove Curves Form Loft/UV Surface更改封闭曲面的起始位置Extend延伸Data Reduction减少数据Sample Uniform平均取样Chordal Deviation弦高取样Space Sampling距离取样Clean Curve清除曲线多余控制点Clean Surface清除曲面多余控制点Reduce Polygon Count简化多边形计算Reduce Polygon to Count减少多边形的数量Smooth光顺处理Scan点云光顺Scan Piecewise整体点群过滤光顺Scan Region区域进行光顺Scan Between Corners转角的光顺Polygons多边形B-spline B-样条曲线Extract抽取Circle-Select Points圈选点群Points With in Curves封闭的曲线圈选点群Points in Box方形框范围内的点云Subtract Cloud from Cloud点云相减Arbitrary Polygon Cut任意剪切多边形Slice均匀分割点群Scan Lines点云上提取扫描线Break Into XYZ Scans提取XYZ平面的扫描线Break Into Distinct Cloud以距离设定分离点群Surface Based Segmentation以曲面为准进行分割Merge合并Clouds+ Subtract Overlap点云合并,删除重叠部分Clouds点群资料相加Scan Cloud Form Scan点群扫描Surface合并曲面Snip剪断-用于曲线Snip polygon Mesh On Plane在平面上剪断多边形线Snip Curve(s)Ctrl+Shift+K剪断曲线Snip Surface Shift+K修剪曲面Split Surface分割曲面Trim修剪-用于曲面Polygon Mesh to Closed Curve封闭曲线向多边形Trim Surface Ctrl+T曲面边界修剪Trim w/Curve依曲线修剪曲面Unitrim Shift+T恢复修剪的曲线Remove Non Trim Curves移除非修剪的曲线Delete Unnecessary Outer Trims删除不必要的修剪曲线Boolean Extraction提取布尔曲线Cutting LineA AndB (Intersection)A OrB (union)A subB (subtraction)Scan Line扫描线Pick Delete Points Ctrl+Shift+P选取删除点云中的杂点Fill Gap补洞Remove Spikes删除尖点Set Opereting Distance设定操作距离Polygon Mesh网格化Vertex顶点Unpolygonize将三角网格回复成点群Delete a Vertex删除顶点Pick Delete Polygons拾取删除多边形Close关闭Close Shape关闭外形Close Selected Region关闭选择物体Close Rings关闭环形选择Join Cloud Vertices 接合点云最高点Cap ModelRepair Polygon Mesh修补多边形网格Remove Redundant移除多余的Remove Degenerate移除退化的Remove Overlaps移除过大的Split Into Distinct Objects分离Split Into Harmonized Objects分离Remove Multiple Edge Polys移除Remove Inconsistent Normal Polys移除Remove Long Polygons移除Direction矢量方向Sort Points by Direction依设定方向排序点Sort Points by Nearest最近似点排序点Reverse Scan Line Ctrl+R改变扫描线方向Reverse Polygon Mesh相反的多变形网格Reverse Polygon Normal将三角网格Normal方向反转Reverse Curve Direction Ctrl+Shift+R相反的曲线矢量方向Reverse Surface Normal Shift+R更改曲面着色方向Harmonize Polygon Normals协调多变形法线Harmonize Curve Direction协调曲线矢量方向Harmonize Surface Normals协调曲面法线Curve Aligned Scan Start Points将起始点定位至曲线上Change Scan Start Point更改扫描起始点Change Curve Start Point更改曲线的起始点Change Surface Start Point更改曲面起始边界Orient确定方向Interactive交互式旋转和平移Rotate旋转Translate平移Scale放大缩小Mirror镜像Transform Curve改变相对(绝对)特件坐标Send Home将物件送回原始位置Reset Home设定物件坐标位置Reset Object Axis重新设置物体坐标Align对齐Point Set to Point Set点对点定位Constrained Point Set to Point Set强制点对点定位321321对齐Iterative交互式对齐Mixed Mode混合模式对齐Constrained Mixed Mode强迫的混合对齐StepWise逐步式对齐SPT SPT对齐Best Fit最合适的对齐Constrained Best Fit强迫的最合适的对齐Align to Coordinate System坐标系统对齐Auto Align Cloud自动对齐点云Reapply坐标系重新对齐Inverse Matrix倒转矩阵Combine Matrices结合矩阵Identify Quadrics确定二次曲面Curve二次曲线Surface二次曲面Annotation注解Text Label文本标注Dimension Label尺寸标注Quadric Label二次曲面标注Error Needle Label公差标注Auto Arrange自动排列Evaluate-评估Control Plot曲线与曲面控制点分布图Tangent/Normal切线与法线Cloud Normals点云的法线Reset Cloud Normals重设点云的法线Curve Tangent曲线的切线Surface Normal曲面的法线Curvalure 曲率Cloud Curvalure点云曲率Curve Curvalure曲线曲率Curve Inflection曲线变形Surface Contours曲面的曲率分布图Surface Needles检验曲面的连续性Surface Flow流程, 流动Cloud Reflectance点云反射系数Reflection Lines Ctrl+E反射直线Highlight Lines Shift+E突出直线Specular Lines Ctrl+Shift+E镜向直线Cross Section Tangent Lines Arl+Shift+E部分截面切向直线Contour Mapping轮廓绘制Texture Mapping结构绘制Continuity连续性, 连贯性Curve to Curve Ctrl+Shift+O曲线对曲线检查Surface and Curve曲面对曲线检查Multi-Surface Shift+O曲面间的连续性检查Surface Gap/Angle Plot曲面间隙或角度检查Deviation偏差To Point曲线与点To Curve曲线与曲线To Surface曲面与曲面Cloud Characterisitics点云几何特征分析Straightness直线度Flatness平面度Circularity真圆度Cylindricity圆柱度Concentricity同心度Coaxiality同轴度Manufacturability可加工性Draft Angle Plot拔摸角度检查Tool Radius Plot半径工具Identify Redundant SurfacesPolygon Model多边形模型Verify Model检验模型Is Model BuilldableFind Self IntersectionsVolumeSurface AreaCenter of GravityFind Cut Area检查剪切范围Work VolumeFind Interference检查干涉Show Overhang RegionsInformation信息Object目标对象Coordinate System坐标系Database数据库Part零件,局部Alignment查询已对齐信息NedleMeasure-测量Cloud to检查点云Poly-Cloud Comparrison Ctrl+Q三角网格与点群的分析Cloud Difference点云差异Point Set Comparison点群与点群误差分析Many Point Comparison点群与点群误差分析Redisplay Cloud Defference重新显示检查点云结果Curve to检查曲线与点云差异Cloud Difference Ctrl+Shift+Q曲线和点云误差Curve Difference曲线差异Curve Min Distance点云与曲线的最短距离Redisplay Curve Defference重新显示检查曲线结果Surface to检查曲面与点云差异Cloud Difference Shift+Q曲面与点云差异Surface Difference曲面差异Redisplay Surface Defference重新显示检查曲面结果Distance 点之间距离Between Points点之间距离Point to Curve Closest点到曲线最短距离Point to Surface Closest点到曲面最短距离Angle/Tangent DirectionBetween Points点之间距离Direction Between Points测量两点间方向向量Angle Between Polygons测量两点间夹角Between Curve Tangents两曲线之切线夹角Curve Tangent Direction曲线切线方向Between Surface and Curve曲面与曲线之夹角Between Surface T angents曲面间切线平面夹角Surface Tangent Plane曲面上任一点的相切平面LocationPoint Location任一点坐标Surface LocationRadius Of Curvature3D Cloud Minimum点云最小曲率半径Cloud点云曲率半径Curve曲线Surface曲面Circumfernce使弯成圆形QuadricsPiercing Point尖点Enge Point末点Circle圆Slot沟槽Rectangle矩形Polygon多边形Plane平面Sphere球面Cylinder圆柱面Cone圆锥面Interactive交互式的Help-帮助Command Reference shift+F1命令介绍What's New in 11.1V11.1新增内容About Imageware关于Imageware。
01.ENVI简介
1、ENVI5.3界面自ENVI5.0版本开始,ENVI采用了全新的软件界面,从整体上增强了用户体验,ENVI5.3延续了ENVI5的界面风格,对图标做了更现代化的设计。
启动ENVI5.3,如下图所示,包括菜单项、工具栏、图层管理、工具箱、状态栏几个部分组成。
图1 ENVI5.3软件界面为了方便老用户的使用,ENVI 5.3还保留了经典的菜单+三视窗的操作界面,也就是在安装ENVI5.3时候,自动会把ENVI Classic版本安装。
其实ENVI Classic就是一个完整的ENVI4.8或更早期的版本。
习惯这种界面风格的用户,可以选择使用ENVI Classic界面操作。
图2 经典ENVI操作界面2、ENVI安装目录结构一般情况下ENVI 5.3安装在Exelis文件夹下,完全版本包括IDL、License等文件夹。
ENVI5.3的所有文件及文件夹保存在HOME\Program Files\Exelis\ENVI53下。
表2.1 ENVI5.3安装目录说明3.2特定数据的打开虽然上述的Open 功能可以打开大多数文件类型,但对于特定的已知文件类型,我们需要打开图像文件外,还需要打开图像文件附带的其他文件,比如RPC文件等。
使用File > Open AS 菜单,ENVI 能够读取一些标准文件类型的若干格式,包括精选的遥感格式、军事格式、数字高程模型格式、图像处理软件格式及通用图像格式。
ENVI 从内部头文件读取必要的参数,因此不必在Header Information对话框中输入任何信息。
如下为打开一个多波段Landsat Fast格式的过程:1.选择主菜单>File > Open AS >Landsat >FAST2.对于Fast TM 格式数据,选择header.dat文件。
对于Landsat 7 FAST 全色波段数据,选择 .hpn 头文件。
对于VNIR/SWIR Landsat 7 FAST 数据6个波段,选择 .hrf 头文件。
ENVI汉化对照

ENVI主菜单中英文对照File 文件Open image file 打开图像文件Open vector file 打开矢量文件Open remote file 打开远程文件Open exteral file 打开特定文件Open previous file 最近使用文件Launch ENVI zoom 启动ENVI zoomEdit ENVI header 编辑头文件Generate test data 生成测试数据Data view 数据浏览Save file as 另存为Import from IDL variable 导入IDL变量Export to IDL variable 导出为IDL变量Compile IDL module 编译IDL程序IDL CPU parameters IDL CPU参数设置Tape utilties:磁带工具Read known tape formats 磁带格式读取各种传感器Read/write ENVI tapes ENVI磁带读写Read ENVI tape 磁带读取Write ENVI files to tape 写入磁带Scan tape and customize dump 浏览磁带并保存Dump tape 转储磁带Scan directory list 扫描目录Change output directory 更改扫描目录Save session to script 作业保存Execute startup script 脚本执行Restore display group 显示恢复ENVI queue manager ENVI队列管理ENVI log manager ENVI日志管理Close all files 关闭所有文件Preferences 参数设置Exit 退出Basic tools 基本工具Resize data(spatial/spectral) 数据重采样(空间子集/光谱子集)Subset data via ROIs 通过感兴趣区裁剪数据(选取子集) Rotate/flip data 旋转/翻转数据Layer stacking 图层堆栈Convert data(BSQ ,BIL ,BIP ) 数据格式转换Stretch data 数据拉伸Statistics 统计Compute statistcs 统计计算View statistics 查看统计文件Sum data bands 数据波段求和Generate random sample 生成随机样本Using ground truth classification 基于地表真实分类影像Using ground truth ROIs 基于地表真实感兴趣区Spactial statistics 空间统计Compute global spatial statistics 全局统计Compute local spatial statistics 局部统计Change detection 变化检测Measurement tool 量测工具Band math 波段运算Spectral math 光谱运算Segmentation image 图像分割Region of interest 感兴趣区Rool tool 感兴趣区Restore saved ROI file 打开感兴趣区文件Save ROIs to file 保存为感兴趣区文件Delete ROIs 删除感兴趣区Export ROIs to EVF 将感兴趣区导出为EVFExport ROIs to n-D visualizer 将感兴趣区导出进行n维散度分析Export ROIs to training data 将感兴趣区导出为矢量训练样本Output ROIs to ASCII 将感兴趣区导出为ASCII码文件Reconcile ROIs 调整感兴趣区Reconcile ROIs via map 利用地图调整感兴趣区Band threshold to ROI 利用波段阈值定义感兴趣区Creat class image from ROIs 利用感兴趣区生成分类图像Creat buffer zone from ROIs 利用感兴趣区生成缓冲区Compute ROI separability 计算感兴趣区分离度Mosaicking 图像镶嵌Pixel based 基于像素镶嵌Georeferenced 基于地理坐标镶嵌Tiled quickbird product 产品镶嵌Tiled worldview product 产品镶嵌Masking 掩膜Build mask 建立掩膜Apply mask 应用掩膜Preprocessing 预处理Calibration utilities 定标工具AVHRRLandsat calibration landsat 定标Quickbird radianceWorldview radianceFLAASH 大气纠正Quick atmospheric correction 快速大气校正Flat filed 平面场定标Log residuale 对数残差定标IAR reflectance IAR 反射率定标Empirical line 经验线性定标Thermal atm correction 热红外大气校正TIMS radiance 热红外多波段扫描仪定标Calculate emissivity 发射率计算General purpose utilities 通用工具Replace bad lines 坏行修补Dark substract 黑暗像元法Apply gain and offset 应用增益和偏移校正Destripe 多带噪声去除Cross-tarck Illumination correction 轨道光照修正Convert complex data complex转换Convert vax to IEEE vax转换为IEEEData-specific utilities 特定数据处理工具各种3.Classification 分类Supervised 监督分类Parallelepiped 平行六面体Minimum distance 最小距离法Mahalanobis distance 马氏距离法Maximum distance 最大似然法Spectral angle mapper 波谱角制图Spectral information divergence 光谱信息散度Binary encoding 二进制编码Netural net 神经网络Support vector machine 支持向量机Unsupervised 非监督分类IsodataK-MeansDecision tree 决策树分类Build new decision tree 新建决策树Edit existing decision tree 编辑决策树Execute existing decision tree 执行决策树Endmember collection 端元收集器Create class image from ROIs 利用感兴趣区生成分类图像Post classification 分类后处理Assign class colors 分类颜色设置Rule classifier 规则分类器Class statistics 分类结果统计Change detection statistics 变化监测统计Confusion matrix 混淆矩阵分析Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真实感兴趣区ROC curves ROC曲线Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真实感兴趣区Generate random sample 生成随机样本Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真是感兴趣区Majority/minority analysis 主要/次要分析Clump classes 分类集群Sieve classes 分类筛选Combine classes 分类合并Overly classes 分类叠加Buffer zone image 缓冲区分析Segmentation image 图像分割Classification to vector 分类结果转换为矢量4.Transform 变换Image sharpening 图像融合HSV HSV融合Color normalized(Brovey) Brovey融合Gram-schmidt spectral shapening Gram-schmidt融合PC spectial sharpening 主成分分析CN spectial sharpening CN波谱融合Band ratios 波段比Principal components 主成分分析Forward PC rotation 正向主成分分析Compute new statistics and rotate 计算统计值分析PC rotation from existing stats 现有统计值分析Inverse PC rotation 反向主成分分析变换Independent components独立主成分分析Compute new stats and rotate 计算统计值分析IC rotation from existing stats 现有统计值分析IC rotation from existing transformMNF rotation MNF变换(最小噪声分离)Forward MNF 正向MNF变换Estimate noise statistics from data 估算噪声分析Previous noise statistics 历史噪声统计Noise statistics from dark data 黑区图像估计噪声Inverse MNF transform 反向MNF变换Apply forward MNF to spectra 波谱应用正向MNF变换Apply inverse MNF to spectra 波谱应用反向MNF变换Color transforms 颜色空间变换RGB to HSVHSV to RGBHLS to RGBHSV to RGBDecorrelation stretch 去相关拉伸Photographic stretch 摄影拉伸Saturation stretch 饱和度拉伸Synthetic color image 合成彩色影像NDVITasseled cap 缨帽变换5.FilterConvolutions and morphology 卷积滤波Texture 纹理分析Occurrence measures 概率统计Co-occurrence measures 二阶概率统计Adaptive 自适应滤波LeeEnhanced lee 增强lee 滤波FrostEnhanced frost 增强forst 滤波GrmmaKuanLocal sigmaBit errorsFFT filtering 傅立叶变换滤波Forward EET 正向傅立叶变换Filter definition 滤波器自定义Inverse FFT 反向傅立叶变换6.Spectial 波谱工具SPEAR tools SPEAR工具THOR workflows 流程化高光谱工具Target detection wizard 目标检测向导Spectial libraries 波谱库Spectial slices 波谱切割MNF rotation MNF变换(最小噪声分离)Pixel purity index 纯净像元指数PPIn-Dimensional visualizer n维数据可视化Mapping methods 制图方法Vegetation analysis 植被分析Vegetation suppression 植被抑制SAM target finder with bandmax 基于bandMax的SAM目标查找提取RX anomaly detection RX异常检测Spectral hourglass wizard 波谱沙漏向导Automated spectial hourglass 自动波谱沙漏向导Spectral analyst 波谱分析Multi range SFF 多谱段SFFSMACC endmember extraction SMACC端元提取Spectial math 波谱运算Spectral resampling 波普重采样Gram-schmidt spectial sharpening Gram-schmidt 波谱融合PC spectial sharpening PC波段融合CN spectial sharpening CN波段融合EFFORT polishing EFFORT 波谱打磨FLAASH FLAASH大气校正Quick atmospheric correction 快速大气校正Build 3D cube 建立3D立方体Preprocessing 预处理Calibration utilitiesAVHRRLandsat calibrationQuickbird radianceWorldview radianceFLAASHQuick atmospheric correctionFlat filedLog residualeIAR reflectanceEmpirical lineThermal atm correctionTIMS radianceCalculate emissivityGeneral purpose utilitiesReplace bad linesDark substractApply gain and offsetDestripeCross-tarck Illumination correctionConvert complex dataConvert vax to IEEEData-specific utilities各种7.Map 配准与镶嵌Registration 几何校正Rigorous orthorectification 严格模型正射校正Orthorectification 正射校正Mosaicking 图像镶嵌Georeference from input geometry 输入几何文件进行几何校正Georeference SPOT SPOT几何校正Georeference SeaWiFS SeaWiFS几何校正Georeference ASTER ASTER几何校正Georefencece AVHRR AVHRR几何校正Georeference ENVISAT ENVISAT几何校正Georeference MODIS MODIS几何校正Georeference COSMO-SkyMed(DGM) DGM几何校正Georeference RADARSAT RADARSAT几何校正Build RPCs 构建RPCsCustomize map projections 自定义地图投影Convert map projection 地图投影转换Layer stacking 波段组合Map coordinate converter 地图坐标转换ASCII coordinate conversion ASCII坐标转换Merge old “map_proj.txt” file 合并原有map_proj.txt文件GPS-Link GPS连接8.Vector 矢量工具Open vector image 打开矢量文件Create new vector layer 新建矢量层Using existing vector layer 基于现有矢量层Using raster image file 基于栅格图像文件Using user defined parameters 基于用户自定义参数Create world boundaries 创建世界边界Available vectors list 当前矢量列表Intelligent digitizer 智能数字化工具Raster to vector 栅格转矢量Classification to vector 分类结果矢量化Rasterize point data 离散点栅格化Convert contours to DEM 等高线转为DEM9.Topographic 地形工具Open topographic file 打开地形文件Topographic modeling 地形模型Topographic features 地貌特征分析DEM extraction DEM提取 DEM提取向导提取向导使用现有文件 选择立体控制点对 选择立体匹配点 构建核面图像 提取DEM编辑DEM立体3D测量3D核面指针Create hill shade image 山体阴影图生成Replace bad values 坏值替换Rasterize point data 离散点栅格化Convert conturs to DEM 等高线转为DEM3D surfaceview 3D曲面浏览Outil bathym rie 10.Rader 雷达工具Open/prepare rader file 打开/预处理雷达数据文件Calibration 定标Beta noughtSigma noughtAntenna pattern correction 天线阵列校正Slant-to-ground range 斜地校正Incidence angle image 入射角图像Adaptive filters 自适应滤波Texture filters 纹理滤波Synthetic color image 彩色图像合成Polarimetric tools 极化分析工具Synthesize AIRSAR Data AIRSAR数据合成Synthesize SIR-C data SIR-C数据合成Extract polarization sigbatures 极化信号提取Multilook compressed data 数据压缩多视Phase image 相位图像Pedestal height image 图像消隐脉冲高度AIRSAR scattering classification AIRSAR散射机理分析TOPSAR tools TOPSAR工具Open TOPSAR file 打开TOPSAR文件Convert TOPSAR data 打开TOPSAR数据DEM replace bad value DEM坏值替换11.WindowWindow finder 查找窗口Start new display window 新建显示窗口Start new vector window 新建矢量窗口Start new plot window 新建绘图窗口Start 3D liDAR viewer LiDAR三维浏览器Available files list 当前文件列表Available bands list 当前波段列表Available vectors list 当前矢量列表Remote connection manager 远程连接管理Mouse button descriptions 鼠标按键说明Display information 显示信息Cursor location/value 光标定位/数值信息Point collection 点收集Maximize open displays 显示窗口最大化Link diaplays 关联显示Close all display windows 关闭所有显示窗口Close all plot windows 关闭所有绘图窗口。
ENVI主菜单中英文对照

ENVI主菜单中英文对照ENVI 主菜单中英文对照1. File 文件Open image file 打开图像文件Open vector file 打开矢量文件Open remote file 打开远程文件Open exteral file 打开特定文件Open previous file 最近使用文件Launch ENVI zoom 启动ENVI zoom Edit ENVI header 编辑头文件Generate test data 生成测试数据Data view 数据浏览Save file as 另存为Import from IDL variable 导入IDL 变量Export to IDL variable 导出为IDL 变量Compile IDL module 编译IDL 程序IDL CPU parameters IDL CPU 参数设置Tape utilties :磁带工具Read known tape formats 磁带格式读取各种传感器Read/write ENVI tapes ENVI 磁带读写Read ENVI tape 磁带读取Write ENVI files to tape 写入磁带Scan tape and customize dump 浏览磁带并保存Dump tape 转储磁带Scan directory list 扫描目录Change output directory 更改扫描目录Save session to script 作业保存Execute startup script 脚本执行Restore display group 显示恢复ENVI queue manager ENVI 队列管理ENVI log manager ENVI 日志管理Close all files 关闭所有文件Preferences 参数设置Exit 退出2. Basic tools 基本工具Resize data(spatial/spectral)数据重采样(空间子集/ 光谱子集)Subset data via ROIs 通过感兴趣区裁剪数据(选取子集)Rotate/flip data 旋转/翻转数据Layer stacking 图层堆栈Convert data(BSQ ,BIL ,BIP ) 数据格式转换Stretch data 数据拉伸Statistics 统计Compute statistcs 统计计算View statistics 查看统计文件Sum data bands 数据波段求和Generate random sample 生成随机样本Using ground truth classification 基于地表真实分类影像Using ground truth ROIs 基于地表真实感兴趣区Spactial statistics 空间统计Compute global spatial statistics 全局统计Compute local spatial statistics 局部统计Change detection 变化检测Measurement tool 量测工具Band math 波段运算Spectral math 光谱运算Segmentation image 图像分割Region of interest 感兴趣区Rool tool 感兴趣区Restore saved ROI file 打开感兴趣区文件Save ROIs to file 保存为感兴趣区文件Delete ROIs 删除感兴趣区Export ROIs to EVF 将感兴趣区导出为EVFExport ROIs to n-D visualizer 将感兴趣区导出进行n 维散度分析Export ROIs to training data 将感兴趣区导出为矢量训练样本Output ROIs to ASCII 将感兴趣区导出为ASCII 码文件Reconcile ROIs 调整感兴趣区Reconcile ROIs via map 利用地图调整感兴趣区Band threshold to ROI 利用波段阈值定义感兴趣区Creat class image from ROIs 利用感兴趣区生成分类图像Creat buffer zone from ROIs 利用感兴趣区生成缓冲区Compute ROI separability 计算感兴趣区分离度Mosaicking 图像镶嵌Pixel based 基于像素镶嵌Georeferenced 基于地理坐标镶嵌Tiled quickbird product 产品镶嵌Tiled worldview product 产品镶嵌Masking 掩膜Build mask 建立掩膜Apply mask 应用掩膜Preprocessing 预处理Calibration utilities 定标工具AVHRR Landsat calibration landsat 定标Quickbird radianceWorldview radianceFLAASH 大气纠正Quick atmospheric correction 快速大气校正Flat filed 平面场定标Log residuale 对数残差定标IAR reflectance IAR 反射率定标Empirical line 经验线性定标Thermal atm correction 热红外大气校正TIMS radiance 热红外多波段扫描仪定标Calculate emissivity 发射率计算General purpose utilities 通用工具Replace bad lines 坏行修补Dark substract 黑暗像元法Apply gain and offset 应用增益和偏移校正Destripe 多带噪声去除Cross-tarck Illumination correction 轨道光照修正Convert complex data complex 转换Convert vax to IEEE vax 转换为IEEE Data-specific utilities 特定数据处理工具3. Classification 分类Supervised 监督分类Parallelepiped 平行六面体Minimum distance 最小距离法Mahalanobis distance 马氏距离法Maximum distance 最大似然法Spectral angle mapper 波谱角制图Spectral information divergence 光谱信息散度Binary encoding 二进制编码Netural net 神经网络Support vector machine 支持向量机Unsupervised 非监督分类IsodataK-MeansDecision tree 决策树分类Build new decision tree新建决策树 Edit existing decision tree编辑决策树 Execute existing decision tree 执行决策树Endmember collection 端元收集器Create class image from ROIs 利用感兴趣区生成分类图像Post classification 分类后处理Assign class colors 分类颜色设置Rule classifier 规则分类器Class statistics 分类结果统计Change detection statistics 变化监测统计Confusion matrix 混淆矩阵分析Using ground truth imageUsing ground truth ROIsROC curves ROC 曲线Using ground truthimage Using ground truth ROIs Generate random sampleUsing ground truth imageUsing ground truth ROIsMajority/minority analysis Clumpclasses 分类集群Sieve classes 分类筛选Combine classes 分类合并Overlay classes 分类叠加Buffer zone image 缓冲区分析Segmentation image 图像分割Classification to vector 分类结果转换为矢量 4. Transform 变换Image sharpening 图像融合HSV 融合Color normalized(Brovey) Brovey 融合Gram-schmidt spectral shapening Gram-schmidt 融合PC spectial sharpening 主成分分析基于地表真实影像基于地表真实感兴趣区基于地表真实影像基于地表真实感兴趣区生成随机样本基于地表真实影像基于地表真是感兴趣区主要/ 次要分析CN spectial sharpening CN波谱融合 Band ratios 波段比Principal components 主成分分析Forward PC rotation 正向主成分分析Compute new statistics and rotate 计算统计值分析PC rotation from existing stats现有统计值分析 Inverse PC rotation反向主成分分析变换Independent components 独立主成分分析Forward IC rotation 独立主成分分析 Compute new stats and rotate 计算统计值分析IC rotation from existing stats现有统计值分析IC rotation from existing transformInverse IC rotation 反向独立主成分分析变换MNF rotationMNF 变换(最小噪声分离)Forward MNF 正向 MNF 变换Estimate noise statistics fromdataPrevious noise statisticsNoise statistics from dark dataApply forward MNF to spectraApply inverse MNF to spectra Color transformsRGB to HSVHSV to RGBHLS to RGBHSV to RGBDecorrelation stretch 去相关拉伸Photographic stretch 摄影拉伸Saturation stretch 饱和度拉伸NDVITasseled cap 缨帽变换5. Filter 过滤器Convolutions and morphology 卷积滤波 Texture 纹理分析Occurrence measures 概率统计Co-occurrence measures 二阶概率统计估算噪声分析历史噪声统计黑区图像估计噪声 MNF 变换波谱应用正向MNF 变换波谱应用反向MNF 变换 Inverse MNF transform 反向颜色空间变换Synthetic color image 合成彩色影像Adaptive 自适应滤波Lee Enhanced lee 增强 lee 滤波 Frost Enhanced frost 增强 forst 滤波Grmma 、Kuan 、 Local sigma 、Bit errors FFT filtering 傅立叶变换滤波 Forward EET 正向傅立叶变换 Filter definition 滤波器自定义 Inverse FFT 反向傅立叶变换6.Spectial 波谱工具 SPEAR tools SPEAR 工具THOR workflows 流程化高光谱工具波谱库波谱切割变换(最小噪声分离)纯净像元指数 PPI n- Dimensional visualizer nMapping methods 制图方法Vegetation analysis 植被分析Vegetation suppression 植被抑制SAM target finder with bandmax基于 bandMax 的 SAM 目标查找提取RX anomaly detection RX 异常检测Spectral hourglass wizard 波谱沙漏向导Automated spectial hourglass 自动波谱沙漏向导Spectral analyst 波谱分析Multi range SFF 多谱段 SFFSMACC endmember extraction SMACC 端元提取Spectial math 波谱运算Spectral resampling 波普重采样Gram-schmidt spectial sharpening Gram-schmidt波谱融合 PC spectial sharpening PC波段融合 CN spectial sharpening CN波段融合 EFFORT polishing EFFORT 波谱打磨FLAASH FLAASHt 气校正Quick atmospheric correction 快速大气校正Build 3D cube 建立3D 立方体Preprocessing 预处理Target detection wizard目标检测向导 Spectial librariesSpectial slices MNFrotation MNF Pixelpurity index维数据可视化Calibration utilitiesAVHRRLandsat calibrationQUickbird radianceWorldview radianceFLAASHQuick atmospheric correctionFlat filedLog residualeIAR reflectanceEmpirical lineThermal atm correctionTIMS radianceCalculate emissivityGeneral purpose utilitiesReplace bad linesDark substractApply gain and offsetDestripeCross-tarck illumination correctionConvert complex dataConvert vax to IEEEData-specific utilities7. Map (配准与镶嵌)Registration 几何校正Rigorous orthorectification 严格模型正射校正Orthorectification 正射校正Mosaicking 图像镶嵌Georeference from input geometry 输入几何文件进行几何校正Georeference SPOT SPOT几何校正Georeference SeaWiFS SeaWiFS 几何校正Georeference ASTER ASTER 几何校正Georefe ncece AVHRR AVHRR 几何校正Georeference ENVISAT ENVISAT 几何校正Georeference MODIS MODIS 几何校正Georeferenee COSMO-SkyMed (DGM DGM 几何校正Georefere nee RADARSAT RADARSATL 何校正Build RPCs 构建RPCs。
ENVI使用手册

第一章:ENVI 概述如何使用本手册本手册包括若干章节;每章描述ENVI 提供的一系列处理程序。
多数章节遵循ENVI 的菜单结构。
例如,第4 章的标题为“Basic Tools”,它描述的功能可以在ENVI 的Basic Tools下拉菜单下找到。
5 个附录分别针对:ENVI基本功能、文件格式、波谱库、地图投影以及描述ENVI 该版本的新特征。
该介绍性章节包括与ENVI 图形用户界面(GUI)的交互,使用ENVI 窗口,及其它介绍性材料。
新的ENVI 用户使用前务必认真阅读本手册,以及附带的ENVI 教程。
对于章节中的每个主题,功能描述之后给出了实现它的一步步向导。
向导中描述了参数,通常还附有建议和例子。
大多数功能(除了交互的功能)从ENVI 的下拉主菜单启动。
出现包含接受用户输入参数的对话框。
许多参数包含系统默认值并且有一些是可选的。
当功能运行时,出现一个处理状态窗口。
运行功能的一步步向导被编号并且用粗体显示。
鼠标控制菜单选项与用斜体字印刷的下拉菜单一同出现。
子菜单用“>” 连接。
每个步骤内的选项用项目符号显示。
按钮名用引号标明,对话框标题以大写字母开头。
一些对话框内部有下拉菜单。
每个下拉菜单下的选项通常在以该下拉菜单名为标题的一节中描述。
例如,这些是如何对一个文件进行的向导:1. 从ENVI 主菜单,选择Filters > Convolutions > Median 。
将出现一个文件选择对话框, 允许你交互地改变目录并选定需要的输入文件。
2. 通过点击文件名,再点击“OK” 或“Open”,来选择所需要的文件。
若有必要,使用任意空间和/或波谱的构造子集(subsetting)。
3. 当出现Convolution Parameters 对话框,在“Size” 文本框中,输入所需要的滤波器大小。
4. 选择输出到“File” 或“Memory”,若需要,键入一个输出文件名。
5. 点击“OK”,开始处理。
ENVI主菜单中英文对照

Occurrence measures概率统计
Co-occurrence measures二阶概率统计
Adaptive自适应滤波
LeeEnhancedlee增强lee滤波
FrostEnhanced frost增强forst滤波
Grmma、Kuan、Local sigma、Bit errors
HSV to RGB
Decorrelation stretch去相关拉伸
Photographic stretch摄影拉伸
Saturation stretch饱和度拉伸
Synthetic color image合成彩色影像
NDVI
Tasseled cap缨帽变换
5.Filter过滤器
Convolutions and morphology卷积滤波
Thermal atm correction热红外大气校正
TIMS radiance热红外多波段扫描仪定标
Calculate emissivity发射率计算
General purpose utilities通用工具
Replace bad lines坏行修补
Dark substract黑暗像元法
Apply gain and offset应用增益和偏移校正
Destripe多带噪声去除
Cross-tarck Illumination correction轨道光照修正
Convert complex data complex转换
Convert vax to IEEE vax转换为IEEE
Data-specific utilities特定数据处理工具
3.Classification分类
菜单中英文对照表一

菜单中英文对照表一菜单中英文对照表一、File〈文件〉New-----------------------〈新建〉Reset---------------------〈重置〉Open----------------------〈打开〉Save-----------------------〈保存〉Save As-------------------〈保存为〉Save selected----------〈保存选择〉XRef Objects -----------〈外部引用物体〉XRef Scenes -----------〈外部引用场景〉Merge --------------------〈合并〉Merge Animation--------〈合并动画动作〉Replace------------------〈替换〉Import---------------------〈输入〉Export---------------------〈输出〉Export Selected----------〈选择输出〉Archive--------------------〈存档〉Summary Info-----------〈摘要信息〉File Properties----------〈文件属性〉View Image File--------〈显示图像文件〉History--------------------〈历史〉Exit----------------------〈退出〉二、Edit〈菜单〉Undo or Redo----------〈取消/重做〉Hold and fetch---------〈保留/引用〉Delete----------------〈删除〉Clone--------------------〈克隆〉Select All-----------------〈全部选择〉Select None-------------〈空出选择〉Select Invert-------------〈反向选择〉Select By-----------------〈参考选择〉Color--------------------〈颜色选择〉Name---------------------〈名字选择〉Rectangular Region-----〈矩形选择〉Circular Region--------〈圆形选择〉Fabce Region----------〈连点选择〉Lasso Region----------〈套索选择〉Region:-------------------〈区域选择〉Window-----------------〈包含〉Crossing-----------------〈相交〉Named Selection Sets〈命名选择集〉Object Properties--------〈物体属性〉三、T ools〈工具〉Transform Type-In------〈键盘输入变换〉Display Floater-----------〈视窗显示浮动对话框〉Selection Floater--------〈选择器浮动对话框〉Light Lister----------------〈灯光列表〉Mirror-----------------------〈镜像物体〉Array------------------------〈阵列〉Align-----------------------〈对齐〉Snapshot------------------〈快照〉Spacing Tool-------------〈间距分布工具〉Normal Align-------------〈法线对齐〉Align Camera------------〈相机对齐〉Align to View--------------〈视窗对齐〉Place Highlight-----------〈放置高光〉Isolate Selection---------〈隔离选择〉Rename Objects----------〈物体更名〉四、Group〈群组〉Group-----------------------〈群组〉Ungroup-------------------〈撤消群组〉Open-----------------------〈开放组〉Close-----------------------〈关闭组〉Attach-----------------------〈配属〉Detach---------------------〈分离〉Explode--------------------〈分散组〉五、Views〈查看〉Undo View Change/Redo View change〈取消/重做视窗变化〉Save Active View/Restore Active View〈保存/还原当前视窗〉Viewport Configuration--------------〈视窗配置〉Grids----------------------------------〈栅格〉Show Home Grid------------------〈显示栅格命令〉Activate Home Grid---------------〈活跃原始栅格命令〉Activate Grid Object---------------〈活跃栅格物体命令〉Activate Grid to View--------------〈栅格及视窗对齐命令〉Viewport Background------------〈视窗背景〉Update Background Image-----〈更新背景〉Reset Background Transform〈重置背景变换〉Show Transform Gizmo---------〈显示变换坐标系〉Show Ghosting--------------------〈显示重橡〉Show Key Times------------------〈显示时间键〉Shade Selected-------------------〈选择亮显〉Show Dependencies------------〈显示关联物体〉Match Camera to View----------〈相机与视窗匹配〉Add Default Lights To Scene-〈增加场景缺省灯光〉Redraw All Views----------------〈重画所有视窗〉Activate All Maps------------------〈显示所有贴图〉Deactivate All Maps--------------〈关闭显示所有贴图〉Update During Spinner Drag --〈微调时实时显示〉Adaptive Degradation Toggle---〈绑定适应消隐〉Expert Mode----------------------〈专家模式〉六、Create〈创建〉Standard Primitives--------------〈标准图元〉Box------------------------------------〈立方体〉Cone---------------------------------〈圆锥体〉Sphere-------------------------------〈球体〉GeoSphere-------------------------〈三角面片球体〉Cylinder-----------------------------〈圆柱体〉Tube---------------------------------〈管状体〉Torus--------------------------------〈圆环体〉Pyramid-----------------------------〈角锥体〉Plane--------------------------------〈平面〉Teapot-------------------------------〈茶壶〉Extended Primitives-------------〈扩展图元〉Hedra--------------------------------〈多面体〉Torus Knot-------------------------〈环面纽结体〉Chamfer Box----------------------〈斜切立方体〉Chamfer Cylinder----------------〈斜切圆柱体〉Oil Tank----------------------------〈桶状体〉Capsule----------------------------〈角囊体〉Spindle-----------------------------〈纺锤体〉L-Extrusion------------------------〈L形体按钮〉Gengon-----------------------------〈导角棱柱〉C-Extrusion-----------------------〈C形体按钮〉RingWave-------------------------〈环状波〉Hose--------------------------------〈软管体〉Prism-------------------------------〈三棱柱〉Shapes----------------------------〈形状〉Line---------------------------------〈线条〉Text----------------------------------〈文字〉Arc-----------------------------------〈弧〉Circle-------------------------------〈圆〉Donut-------------------------------〈圆环〉Ellipse------------------------------〈椭圆〉Helix--------------------------------〈螺旋线〉NGon-------------------------------〈多边形〉Rectangle-------------------------〈矩形〉Section-----------------------------〈截面〉Star---------------------------------〈星型〉Lights------------------------------〈灯光〉Target Spotlight-----------------〈目标聚光灯〉Free Spotlight--------------------〈自由聚光灯〉Target Directional Light-------〈目标平行光〉Directional Light----------------〈平行光〉Omni Light-----------------------〈泛光灯〉Skylight----------------------------〈天光〉Target Point Light--------------〈目标指向点光源〉Free Point Light----------------〈自由点光源〉Target Area Light--------------〈指向面光源〉IES Sky---------------------------〈IES天光〉IES Sun--------------------------〈IES阳光〉SuNLIGHT System and Daylight〈太阳光及日光系统〉Camera--------------------------〈相机〉Free Camera-------------------〈自由相机〉Target Camera----------------〈目标相机〉Particles-------------------------〈粒子系统〉Blizzard--------------------------〈暴风雪系统〉PArray----------------------------〈粒子阵列系统〉PCloud---------------------------〈粒子云系统〉Snow------------------------------〈雪花系统〉Spray-----------------------------〈喷溅系统〉Super Spray--------------------〈超级喷射系统〉。
1.ENVI4.5-4.7中文翻译基础——菜单简介 (1)
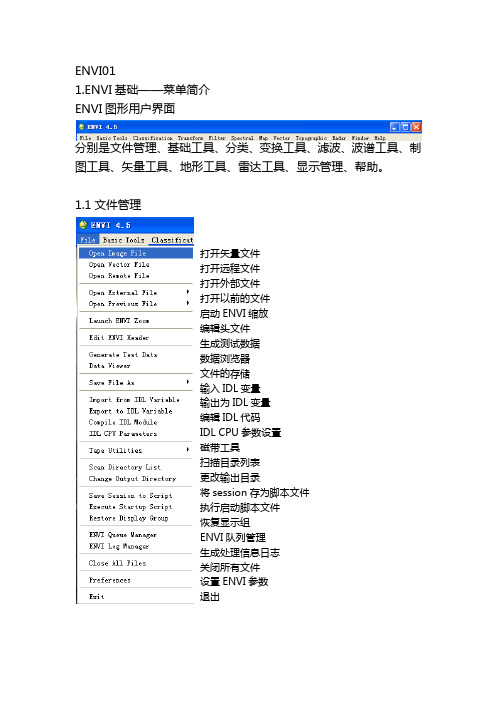
ENVI011.ENVI基础——菜单简介ENVI图形用户界面分别是文件管理、基础工具、分类、变换工具、滤波、波谱工具、制图工具、矢量工具、地形工具、雷达工具、显示管理、帮助。
1.1文件管理打开矢量文件打开远程文件打开外部文件打开以前的文件启动ENVI缩放编辑头文件生成测试数据数据浏览器文件的存储输入IDL变量输出为IDL变量编辑IDL代码IDL CPU参数设置磁带工具扫描目录列表更改输出目录将session存为脚本文件执行启动脚本文件恢复显示组ENVI队列管理生成处理信息日志关闭所有文件设置ENVI参数退出1.2基础工具数据调整(空间/波谱)通过感兴趣区构建数据子集图像旋转层的叠加数据格式转换(BSQ,BIL,BIP)数据拉伸统计工具变化探测分析测量工具波段运算波谱运算图像分割感兴趣区图像镶嵌掩膜预处理1.3分类监督分类费监督分类决策树分类端元波谱收集根据感兴趣区生成分类图像分类后处理1.4变换工具图像锐化波段比独立成分最小噪声(Minimum Noise Fracion)分离变换彩色变换去相关拉伸目视效果拉伸饱和度拉伸彩色合成图像归一化植被指数缨帽变换1.5滤波卷积和形态学滤波纹理滤波自适应滤波频率域(Fast Fourier TransformFiltering)滤波1.6波谱工具The Spectral Processing Exploitation andAnalysis Resource (SPEAR) tools波谱处理与分析资源工具波谱库波谱分割最小噪声变换纯净象元指数N维可视化分析制图方法植被分析植被抑制波谱角分类目标最大波段寻找RX异常检测波谱沙漏向导自动波谱沙漏波谱分析多范围波谱特征拟合连续最大角凸锥端元提取波谱重采样Gram-Schmidt波谱锐化PC波谱锐化CN波谱锐化经验平面域最优化反射率转换工具大气校正三维图像立方体预处理1.7制图工具配准正射纠正图像镶嵌根据输入的几何信息进行地理坐标定位SPOT数据地理坐标定位AVHRR数据地理坐标定位SeaWiFS数据地理坐标定位ASTER数据地理坐标定位AVHRR数据地理坐标定位ENVISAT数据地理坐标定位MODIS数据地理坐标定位RADARSAT数据地理坐标定位RPC(远程过程调用)生成工具自定义地图投影地图投影转换层的叠加地图坐标转换ASCII坐标转换合并旧的投影文件GPS链接1.8矢量工具打开矢量文件创建矢量层创建世界性边界矢量层智能数字化工具栅格图像转换分类图像转换不规则点栅格化矢量地形图转化为栅格DEM将感兴趣区转换为DXF文件将注记文件转换为DXF文件将矢量文件转换为DXF文件1.9地形工具打开地形文件地形建模提取地形特征DEM提取生成山区阴影图像替换坏值不规则点栅格化矢量地形图转化为栅格DEM3D曲面浏览1.10雷达工具打开/准备雷达文件雷达文件定标消除天线增益畸变斜距校正生成入射角图像自适应滤波器纹理滤波器合成彩色图像极化工具TOPSAR工具1.11显示管理窗口查找器启动新的显示窗口启动新的矢量窗口启动新的绘图窗口可用文件列表可用波段列表可用矢量列表远程连接管理显示鼠标按键描述展示显示窗口的信息显示指针位置或数据值点的收集显示窗口最大化链接显示关闭所有显示窗口关闭所有图表窗口1.12帮助打开帮助鼠标按键描述关于ENVI1简介ENVI——完整的遥感图像处理平台ENVI(The Environment for Visualizing Images)是美国Exelis Visual Information Solutions公司的旗舰产品。
ENVI第五次翻译

ENVI第五次翻译翻译成员:李⾦锷、钱志华、倪凤、程楚、王贵晴、许雷湘云、王萍ENVI教程:⼤⽓校正使⽤多光谱数据⼤⽓校正使⽤FLASH的多光谱数据 (2)在本教程种使⽤的⽂件 (2)在ENVI中打开原始陆地卫星图像 (3)准备在Flash中使⽤的图像 (4)TM图像校准亮泽 (4)调整的辐射单元 (4)转换交错 (5)使⽤FLAASH6⽓象校正TM图像 (6)查看校正后的图像 (9)验证模型结果 (10)⽐较图⽚ (10)在ENVI中打开原始陆地卫星图像这次演习将展⽰如何使⽤FLAASH产⽣⼀个明显的表⾯反射率图像。
1。
从ENVI主菜单栏,选择File > Open External File > Landsat > Fast.。
2。
导航数据Data\flaash\multispectral\input_files⽬录中,从列表选择LandsatTM_JasperRidge_HRF.FST头⽂件,然后单击打开,可⽤波段列表显⽰。
3。
从可⽤波段列表中,右键单击LandsatTM_JasperRidge_HRF.FST⽂件并选择Load真彩⾊。
加载图像到显⽰器。
您可能认识到在现场的⼏个特点,包括长湖⾯向西北,东南在中间的图像,图像的左边,各种植被类型和城市区右侧。
此图⽚是⼀个标准的Landsat- 7 L1G数据产品,但它已空间⼦集曾钰成岭⽣物保护区附近的⼀个⼩区域。
数据类型是字节(8位每像素),图像包含未校准的数字号码(或DN)。
4。
从“显⽰”组中的菜单栏,Enhance > [Image] Gaussian,以加强显⽰。
准备FLAASH使⽤图像之前的TM图像可以使⽤FLAASH予以纠正,就必须进⾏校准到适当的光芒单位和转换成⼀个综合保险计划或BIL交错。
校准TM图像的光芒FLAASH要求输⼊图像的光芒校准单位[µW/(平⽅厘⽶* SR* NM)]。
这可以完成两个简单的步骤,使⽤标准的ENVI的实⽤程序。
ENVI(图像裁切、图像增强、分类等)
ENVI(The Environment for Visualizing Images),由美国系统研究公司(Research System INC.)开发。
一. 界面系统介绍1. 主菜单:菜单项,File、Basic Tool、Classification、Tranform、Spectral实习所涉及的(粗略介绍)2. Help 工具的使用3. 主菜单设置(preferences):内存设置二. 文件的存取与显示1.图像显示由一组三个不同的图像窗口组成:主图像窗口、滚动窗口、缩放窗口。
1)主图像Image窗口:(400*400)100%显示(全分辨率显示)scroll的方框,可交互式分析、查询信息。
主图像窗口内的功能菜单:在主图像窗口内点击鼠标右键,切换隐藏子菜单的开启和关闭。
该"Functions" 菜单控制所有的ENVI交互显示功能,这包括:图像链接和动态覆盖;空间和波谱剖面图;对比度拉伸;彩色制图;诸如ROI的限定、光标位置和值、散点图和表面图等交互特征;诸如注记、网格、图像等值线和矢量层等的覆盖(叠置);动画以及显示特征。
2)滚动Scroll窗口:全局,重采样(降低分辨率)显示一幅图像。
只有要显示的图像比主图像窗口能显示的图象大时,才会出现滚动窗口。
滚动窗口位置和大小最初在envi.cfg 文件中被设置并且可以被修改。
3)缩放Zoom窗口:(200*200)显示image的方框。
缩放系数(用户自定义)出现在窗口标题栏的括号中。
2.图像的头文件资料的获取和编辑ENVI:File>>Edit ENVI Header,选择相应的文件。
从Header Info 对话框里,你可以点击Edit Attributes 下拉菜单中的选项,调用编辑特定文件头参数的独立对话框。
这些参数包括波段名、波长、地图信息等。
3.图像的存取File > Open Image File. 当你打开任何文件,可用波段列表(ABL)自动地出现。
Envi软件界面中英文对比参考表

DarkSubtraction(暗像元采集)
确定暗像元的像素值
EFFORT Polishing(EFFORT波谱打磨)
AnomalyDetection Workflow(异常检测流程化工具)
启动异常检测流程化工具
RXAnomaly Detection(RX异常检测)
启动RX异常检测工具
BandRatio工具箱及其功能
BandMath(波段运算)
自定义简单或复杂的处理程序进行波段间运算
BandRatios(波段比值)
波段之间的比值运算
ChangeDetection工具箱及其功能
ChangeDetection Difference Map(直接比较法生成变化图像)
对两幅图像直接生成变化图像
ChangeDetection Statistics(分类后处理变化统计)
对两个分类后的数据生成土地利用转移矩阵
ImageChange Workflow(直接比较法流程化工具)
蝴蝶结校正工具,对GLT重投影
SuperGLT Georeference(超级GLT几何校正)
使用超级GLT文件进行几何校正
SuperIGM Georeference(超级IGM几何校正)
使用超级IGM文件进行几何校正
ImageSharpening工具箱及其功能
CNSpectral Sharping(CN融合)
RADARAT(RADARAT处理工具)
RADARSAT数据处理工具,包括斜地距转换、生成入射角图像、查看元数据文件等
SIR-C(SIR-C处理工具)
SIR-C数据处理工具,如多视、极化信号等
SaveCOSMO-SkyMed Metadata toXML(将CSM元数据保存为XML文件)
《ENVI》实训指导
《ENVI》实训指导书ENVI快速入门一、软件概况介绍:ENVI(The Environment for Visualizing Images)遥感影像处理软件是由美国著名的遥感科学家用IDL开发的一套功能齐全的遥感影像处理软件,它是处理、分析并显示多光谱数据、高光谱数据和雷达数据的高级工具。
曾获2000、2001年美国权威机构NIMA遥感软件测评第一。
ENVI的应用领域包括:地质、林业、农业、模式识别、军事、自然资源勘探、海洋资源管理、环境和土地利用管理等。
二、ENVI的安装1、ENVI永久许可1)ENVI浮动license:服务器版,多个用户可以同时访问一个服务器,服务器需要安装license,客户端不需要安装license,但是需要进行设置。
2)ENVI加密狗:加密狗也需要license安装,但是有灵活、不依赖网卡的特点。
3)ENVI网卡加密:利用网卡号的唯一性进行加密,如果更换机器时,需要将原来的网卡拔下重新安装在新机器上。
2、ENVI临时许可三、目录结构介绍一般情况下ENVI安装在RSI文件夹下,完全版本包括IDL60、License等文件夹,ENVI的所有文件及文件夹保存在IDL60\products\ENVI40下。
✧Bin:相应的ENVI运行目录。
✧Data:数据目录,保存一矢量文件夹(一些矢量数据)和一些例子数据(有些数据有头文件,有些数据没有头文件)。
✧Flt_func:ENVI常规传感器的光谱库文件。
例如:aster、modis、spot、tm等。
✧Help:ENVI的帮助文档。
✧Lib:IDL生成的可编译的程序,用于二次开发。
✧Map_proj:影像的投影信息,文本格式,客户可以进行定制。
✧Menu:ENVI菜单文件,可以进行中、英文菜单互换。
并不是所有的英文菜单都已经汉化,汉化工作我们正在做,以后会陆续推出。
✧Save:应用IDL可视化语言编译好的、可执行的ENVI程序。
ENVI笔记

ENVI笔记ENVI学习笔记(一)监督分类监督分类:最大似然法,最小距离法,平行六面体法,马氏距离法,波谱角法,而至编码法。
实验室的论文中出现较多的是最大距离法的分类。
1所有的监督分类法,都需要确定感兴趣区(ROI)。
2一般常用的波段组合是7,4,1或者4,3,2。
有时可以选择3,3,3。
其中,7,4,1波段的组合,最接近地物的实际颜色。
3右键——ROI Tool——设定分类系统,根据分类系统取不同地物的样点;主菜单上的Classification——supervised——maximum likelihood_——如果有掩膜,选定图像的文件后,要加上掩膜,左后才可以确定分类;如果没有掩膜,直接确定分类即可。
(二)非监督分类非监督分类:K-Means(K均质分类)Isodate(迭代自组织数据分类技术)。
非监督分类不需要选择感兴趣区,可以直接分类。
主菜单上的Classification——unsupervised——K-Means——确定分为几个类型后直接确定即可自动分类。
(三)掩膜1右键——ROI Tool——小菜单上的ROI-Type——Rectange (矩形)/Polygon(不规则的多边形)——画出需要的图像范围;2主菜单上的Basic T ools——Masking——Build Mask——选择出相应的窗体文件名——小菜单上Options——Import RoIS——选择所画掩膜区——OK——Apply.3几幅图像如果需要完全一样大,则只在一幅图像上画出感兴趣区,其他完全一样即可。
注意:每个图像要有与之完全匹配的掩膜!有时,做好研磨后导出的原图大小不等,只需分类后套上掩膜,即可。
(四)决策树分类打开tm 影像,和dem影像1主菜单上的Classification——Decision Tree——Build new tree2在第一个模块上,右键——Edit Decision Properties或者单击左键即可3在name中输入所需要分类的标准表达式。
ENVI-met 3.1 中文参照

ENVI中文手册

箭头切换按钮是由与文本相关的一个矩形按钮框架内的两个箭头组成的一个位图按钮。点击按钮,在两种可能选项之间切换显示。已选择的选项显示在相关的文本框中。
可编辑的文本小部件和标签小部件
可编辑的文本小部件是提供用户键盘输入的矩形框。ENVI中,许多可编辑的文本小部件首次出现时,含有系统默认的文本字符串。可编辑的文本小部件的内容可以通过在框内点击鼠标左键以标签要插入的文本位置,然后用键盘输入文本来实现。
envi交互功能71主窗口functions菜单71链接显示与动态覆盖72链接图象72多重动态覆盖72剖面和波谱图profilesandspectralplots74x和y水平的和垂直的剖面74图象波谱图z剖面74附加的z剖面75任意剖面横断面76交互式绘图功能77xycursor77显示图表数据标签77将图表移动到另外一个图表窗口77重新调整图表大小放大78绘图file下拉菜单78绘图edit下拉菜单80绘图options下拉菜单83绘图plotfunction下拉菜单84彩色制图colormapping85envi彩色表和密度分割85交互式密度分割86控制rgb图象通道controlrgbimageplanes87分类彩色制图classcolormapping88显示增强displayenhancements88默认快速拉伸选项defaultquickstretchingoptions89交互式拉伸interactivestretching89general89file下拉菜单90stretchtype下拉菜单91histogramsource下拉菜单94options下拉菜单94滤波filter95直方图匹配histogrammatching95感兴趣区regionofinterest96定义感兴趣区definingregionsofinterest96感兴趣区控制roicontrols96感兴趣区类型roitypes99感兴趣区测量工具roimeasurementtool102roioptions下拉菜单103roifile下拉菜单106恢复保存的roi文件restoresavedroifile108保存rois到文件saveroistofile108删除roisdeleterois108协调roisreconcilerois109通过地图协调roisreconcileroisviamap109用图象阈值定义roiimagethresholdtoroi110交互式分析interactiveanalysis110光标位置值cursorlocationvalue110options下拉菜单111像素定位器pixellocator111空间像元编辑器spatialpixeleditor112波谱像元编辑器spectralpixeleditor113动画animation1132d散点图2dscatterplot
envi中文说明
e n v i3.5使用说明(t h a n k s s u p e r s of t)1.数据输入输出格式1.1数据输入格式?通用图像格式TIFF,t f w(T I F F w o r l d file),G E O T I F F,J P E G,B M P,H D F/H D F1-D,P I C T,S R F,X W DN L A P S,P D S(P l a n e t a r y D a t a S y s t e m),MrSid?矢量格式A R C I n t e r c h a n g e F o r m a t(u n c o m p r e s s e d)A R C/In f o Images(.bil)A r c V i e w S h a p e (.s h p)A D R GA u t o C A D D X FD X FM a p I n f o(及相应的.mid文件的属性)M i c r o s t a t i o n .D G NU S G S S D T S&D L G?遥感数据格式L a n d s a t T M:F a s t,G e o T I F,H D F,N L A P S,M R L C,A C R E S C C R S,E S A C E O SS P O T:S P O T,G e o S P O T,A C R E S SPOT,Veg e t a t i o nI K O N O S: G e o T I F F,N I T FI R S: F a s tA V H R R: K L M/L e v e l1b,S H A R P(E S A's A V H R R f o r m a t)S e a W I F S: Level 1B H D F,C E O S(E R S-1,E R S-2,J E R S-1)D M S P(N O A A)T h e r m a l:TIMS,M A S T E RR a d a r:R A D A R S A T,E R S ,J E R S,JPL T O P S A R&P O L S A R,SIR -C,A I R S A R(JPL)SIR-C/X-S A R S P O T(1A, 1B,2A, C A P) Military: A D R G,C A D R G,CIB,N I T FD i g i t a lE l e v a t i o n:D T E D,U S G S D E M ,U S G S S D T S D E MU S G S: D R G,D O Q,DEM,S D T S D E MMODIS S i m u l a t o r(M A S-50H D F)A V I R I S,C A S IA T S RC AD R GCIB?其它遥感软件格式P C I (.p i x) FilesE R M a p p e rE R D A S7.5&IMAGINE8.X(包括其投影信息)?其它数据格式A S C I IDMA D T E D&A D R GD M S PD O QE N V I/I D L C o m m a n d-line VariablesFlat B i n a r y FilesGeneric BIP,B I L,B S QNo P r o p r i e t a r y F o r m a t sO n-t h e-Fly D at a C o n v e r s i o n sU s e r-D e f i n a b l e D a t a F o r m a t sU S G S D E M &D O QU S G S S D T S D E M X,Y,Z A S C I I1.2数据输出格式•ARC/INFO I m a g e s(.b i l)•A r c V i e w S h a p e f i l e s?ASCII (R O I区可以ASCII输出)?BMP(图像可以BMP格式输出,目前有24比特图和8比特灰度图两种)?Direct O u t p u t t o P r i n t e r (先输出到P o s tscript格式上,则用户可进行大小/掩膜等设置)•ERDAS 7.5(.l a n)•E R M A P P E R•G E O T I F F•GIF•P C I(.p i x)•P I C T?P o s tscript(可把掩膜输出到i m a g e或Postscript格式上)•RGB F i l e s•SRF?T I F F(如有地理坐标信息,则可另输出成G e o T I F F文件或.t f w T I F F文件)•X W D?可在I D L命令行将E N V I的波段/文件/子集,及绘图窗口的显示数据输出成I D L变量•E N V I?MPEG(允许将3D曲面飞行动画序列输出为MPEG文件)?N I T F02.00 (MIL-STD-2500A)或02.10 (MIL-STD-2500B)2.交互式分析2.1感兴趣区(R O I):?可交互定义R O I:P o l y g o n s,P o l y l i n e s,P i x e l s?允许多个R O I s合并成一个R O I?可以将整个R O I区转换成点?可将一幅图像里的R O I s通过地理座标转换到另一幅图像里?可通过输入带有像元位置或地理坐标的ASCII文件来定义R O I ?可使图像中的R O I s和从地理坐标来定义的R O I s协调一致?可用2-D散点图曲线或n-D散度分析器来定义R O I?可用区域生长来定义R O I?把ASCII文件转变成多边形R O I s,可将R O I s以ASCII文件输出?在注记中采用T r u e T y p e字体?作为注记的位置矢量图,能保持输出到P R I N T E R或POSTscript上(注:不会显示在输出的图像上)?新增R O I类型——M u l t i Part,用户可实现“d o n u t”R O I s ?ROI分析功能增强:可以计算多个感兴趣区(R O I)的交集,并用计算结果定义新的R O I或进行掩膜2.2n-维散度可视化分析:?给散点窗口中的一类或几类散点增加不同的符号?可以显示和输出任意散点或类的光谱曲线,很容易地勾圈,编辑,分离各类?可视化分析的每一步都可以前进或后退,分析速度可控制?可将外边的光谱曲线读入n-维分析空间和图形窗口?类控制对话框可报告每类里包含的散点数,可显示或关闭每一类或每几类?检索到的统计结果和光谱曲线是来自文件的整个空间维,而不是参与n-D分析的子空间维(子空间维是整个空间维的一个字集)?可将可视化分析窗口与光谱分析工具(S p e c t r a l A n a l y s t)连结起来以便对可视化分析窗口中的光谱曲线和标准光谱库作比较?改进的N-D散度分析功能:可用预分类结果进行N-D散度分析,交互式地进行感兴趣区的细化。
ENVI主菜单中英文对照

ENVI主菜单中英文对照1.File 文件Open image file 打开图像文件Open vector file 打开矢量文件Open remote file 打开远程文件Open exteral file 打开特定文件Open previous file 最近使用文件Launch ENVI zoom 启动ENVI zoomEdit ENVI header 编辑头文件Generate test data 生成测试数据Data view 数据浏览Save file as 另存为Import from IDL variable 导入IDL变量Export to IDL variable 导出为IDL变量Compile IDL module 编译IDL程序IDL CPU parameters IDL CPU参数设置Tape utilties:磁带工具Read known tape formats 磁带格式读取各种传感器Read/write ENVI tapes ENVI磁带读写Read ENVI tape 磁带读取Write ENVI files to tape 写入磁带Scan tape and customize dump 浏览磁带并保存Dump tape 转储磁带Scan directory list 扫描目录Change output directory 更改扫描目录Save session to script 作业保存Execute startup script 脚本执行Restore display group 显示恢复ENVI queue manager ENVI队列管理ENVI log manager ENVI日志管理Close all files 关闭所有文件Preferences 参数设置Exit 退出2.Basic tools 基本工具Resize data(spatial/spectral) 数据重采样(空间子集/光谱子集)Subset data via ROIs 通过感兴趣区裁剪数据(选取子集)Rotate/flip data 旋转/翻转数据Layer stacking 图层堆栈Convert data(BSQ ,BIL ,BIP ) 数据格式转换Stretch data 数据拉伸Statistics 统计Compute statistcs 统计计算View statistics 查看统计文件Sum data bands 数据波段求和Generate random sample 生成随机样本Using ground truth classification 基于地表真实分类影像Using ground truth ROIs 基于地表真实感兴趣区Spactial statistics 空间统计Compute global spatial statistics 全局统计Compute local spatial statistics 局部统计Change detection 变化检测Measurement tool 量测工具Band math 波段运算Spectral math 光谱运算Segmentation image 图像分割Region of interest 感兴趣区Rool tool 感兴趣区Restore saved ROI file 打开感兴趣区文件Save ROIs to file 保存为感兴趣区文件Delete ROIs 删除感兴趣区Export ROIs to EVF 将感兴趣区导出为EVFExport ROIs to n-D visualizer 将感兴趣区导出进行n维散度分析Export ROIs to training data 将感兴趣区导出为矢量训练样本Output ROIs to ASCII 将感兴趣区导出为ASCII码文件Reconcile ROIs 调整感兴趣区Reconcile ROIs via map 利用地图调整感兴趣区Band threshold to ROI 利用波段阈值定义感兴趣区Creat class image from ROIs 利用感兴趣区生成分类图像Creat buffer zone from ROIs 利用感兴趣区生成缓冲区Compute ROI separability 计算感兴趣区分离度Mosaicking 图像镶嵌Pixel based 基于像素镶嵌Georeferenced 基于地理坐标镶嵌Tiled quickbird product 产品镶嵌Tiled worldview product 产品镶嵌Masking 掩膜Build mask 建立掩膜Apply mask 应用掩膜Preprocessing 预处理Calibration utilities 定标工具AVHRR Landsat calibration landsat 定标Quickbird radianceWorldview radianceFLAASH 大气纠正Quick atmospheric correction 快速大气校正Flat filed 平面场定标Log residuale 对数残差定标IAR reflectance IAR 反射率定标Empirical line 经验线性定标Thermal atm correction 热红外大气校正TIMS radiance 热红外多波段扫描仪定标Calculate emissivity 发射率计算General purpose utilities 通用工具Replace bad lines 坏行修补Dark substract 黑暗像元法Apply gain and offset 应用增益和偏移校正Destripe 多带噪声去除Cross-tarck Illumination correction 轨道光照修正Convert complex data complex转换Convert vax to IEEE vax转换为IEEEData-specific utilities 特定数据处理工具3.Classification 分类Supervised 监督分类Parallelepiped 平行六面体Minimum distance 最小距离法Mahalanobis distance 马氏距离法Maximum distance 最大似然法Spectral angle mapper 波谱角制图Spectral information divergence 光谱信息散度Binary encoding 二进制编码Netural net 神经网络Support vector machine 支持向量机Unsupervised 非监督分类IsodataK-MeansDecision tree 决策树分类Build new decision tree 新建决策树Edit existing decision tree 编辑决策树Execute existing decision tree 执行决策树Endmember collection 端元收集器Create class image from ROIs 利用感兴趣区生成分类图像Post classification 分类后处理Assign class colors 分类颜色设置Rule classifier 规则分类器Class statistics 分类结果统计Change detection statistics 变化监测统计Confusion matrix 混淆矩阵分析Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真实感兴趣区ROC curves ROC曲线Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真实感兴趣区Generate random sample 生成随机样本Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真是感兴趣区Majority/minority analysis 主要/次要分析Clump classes 分类集群Sieve classes 分类筛选Combine classes 分类合并Overlay classes 分类叠加Buffer zone image 缓冲区分析Segmentation image 图像分割Classification to vector 分类结果转换为矢量4.Transform 变换Image sharpening 图像融合HSV融合Color normalized(Brovey) Brovey融合Gram-schmidt spectral shapening Gram-schmidt融合PC spectial sharpening 主成分分析CN spectial sharpening CN波谱融合Band ratios 波段比Principal components 主成分分析Forward PC rotation 正向主成分分析Compute new statistics and rotate 计算统计值分析PC rotation from existing stats 现有统计值分析Inverse PC rotation 反向主成分分析变换Independent components独立主成分分析Forward IC rotation 独立主成分分析Compute new stats and rotate 计算统计值分析IC rotation from existing stats 现有统计值分析IC rotation from existing transformInverse IC rotation 反向独立主成分分析变换MNF rotation MNF变换(最小噪声分离)Forward MNF 正向MNF变换Estimate noise statistics from data 估算噪声分析Previous noise statistics 历史噪声统计Noise statistics from dark data 黑区图像估计噪声Inverse MNF transform 反向MNF变换Apply forward MNF to spectra 波谱应用正向MNF变换Apply inverse MNF to spectra 波谱应用反向MNF变换Color transforms 颜色空间变换RGB to HSVHSV to RGBHLS to RGBHSV to RGBDecorrelation stretch 去相关拉伸Photographic stretch 摄影拉伸Saturation stretch 饱和度拉伸Synthetic color image 合成彩色影像NDVITasseled cap 缨帽变换5.Filter 过滤器Convolutions and morphology 卷积滤波Texture 纹理分析Occurrence measures 概率统计Co-occurrence measures 二阶概率统计Adaptive 自适应滤波Lee Enhanced lee增强 lee 滤波Frost Enhanced frost 增强 forst 滤波Grmma、Kuan、Local sigma、Bit errors FFT filtering 傅立叶变换滤波Forward EET 正向傅立叶变换Filter definition 滤波器自定义Inverse FFT 反向傅立叶变换6.Spectial 波谱工具SPEAR tools SPEAR工具THOR workflows 流程化高光谱工具Target detection wizard 目标检测向导Spectial libraries 波谱库Spectial slices 波谱切割MNF rotation MNF变换(最小噪声分离)Pixel purity index 纯净像元指数PPIn-Dimensional visualizer n维数据可视化Mapping methods 制图方法Vegetation analysis 植被分析Vegetation suppression 植被抑制SAM target finder with bandmax 基于bandMax的SAM目标查找提取RX anomaly detection RX异常检测Spectral hourglass wizard 波谱沙漏向导Automated spectial hourglass 自动波谱沙漏向导Spectral analyst 波谱分析Multi range SFF 多谱段SFFSMACC endmember extraction SMACC端元提取Spectial math 波谱运算Spectral resampling 波普重采样Gram-schmidt spectial sharpening Gram-schmidt 波谱融合PC spectial sharpening PC波段融合CN spectial sharpening CN波段融合EFFORT polishing EFFORT 波谱打磨FLAASH FLAASH大气校正Quick atmospheric correction 快速大气校正Build 3D cube 建立3D立方体Preprocessing 预处理Calibration utilitiesAVHRRLandsat calibrationQUickbird radianceWorldview radianceFLAASHQuick atmospheric correctionFlat filedLog residualeIAR reflectanceEmpirical lineThermal atm correctionTIMS radianceCalculate emissivityGeneral purpose utilitiesReplace bad linesDark substractApply gain and offsetDestripeCross-tarck illumination correctionConvert complex dataConvert vax to IEEEData-specific utilities7.Map (配准与镶嵌)Registration 几何校正Rigorous orthorectification 严格模型正射校正Orthorectification 正射校正Mosaicking 图像镶嵌Georeference from input geometry 输入几何文件进行几何校正 Georeference SPOT SPOT几何校正Georeference SeaWiFS SeaWiFS几何校正Georeference ASTER ASTER几何校正Georefencece AVHRR AVHRR几何校正Georeference ENVISAT ENVISAT几何校正Georeference MODIS MODIS几何校正Georeference COSMO-SkyMed(DGM) DGM几何校正Georeference RADARSAT RADARSAT几何校正Build RPCs 构建RPCsCustomize map projections 自定义地图投影Convert map projection 地图投影转换Layer stacking 波段组合Map coordinate converter 地图坐标转换ASCII coordinate conversion ASCII坐标转换Merge old “map_proj.txt” file 合并原有map_proj.txt文件GPS-Link GPS连接8.Vector 矢量工具Open vector image 打开矢量文件Create new vector layer 新建矢量层Using existing vector layer 基于现有矢量层Using raster image file 基于栅格图像文件Using user defined parameters 基于用户自定义参数Create world boundaries 创建世界边界Available vectors list 当前矢量列表Intelligent digitizer 智能数字化工具Raster to vector 栅格转矢量Classification to vector 分类结果矢量化Rasterize point data 离散点栅格化Convert contours to DEM 等高线转为DEM9.Topographic 地形工具Open topographic file 打开地形文件Topographic modeling 地形模型Topographic features 地貌特征分析DEM extraction DEM提取DEM提取向导;提取向导;使用现有文件;选择立体控制点对;选择立体匹配点;构建核面图像;提取DEM;编辑DEM;立体3D测量;3D核面指针Create hill shade image 山体阴影图生成Replace bad values 坏值替换Rasterize point data 离散点栅格化Convert contours to DEM 等高线转为DEM3D SurfaceView 3D曲面浏览Outil bathym rie10.Radar 雷达工具Open/prepare radar file 打开/预处理雷达数据文件Calibration 定标Beta noughtSigma noughtAntenna pattern correction 天线阵列校正Slant-to-ground range 斜地校正Incidence angle image 入射角图像Adaptive filters 自适应滤波Texture filters 纹理滤波Synthetic color image 彩色图像合成Polarimetric tools 极化分析工具Synthesize AIRSAR Data AIRSAR数据合成Synthesize SIR-C data SIR-C数据合成Extract polarization sigbatures 极化信号提取Multilook compressed data 数据压缩多视Phase image 相位图像Pedestal height image 图像消隐脉冲高度AIRSAR scattering classification AIRSAR散射机理分析TOPSAR tools TOPSAR工具Open TOPSAR file 打开TOPSAR文件Convert TOPSAR data 打开TOPSAR数据DEM replace bad value DEM坏值替换11.window 窗口Window finder 查找窗口Start new display window 新建显示窗口Start new vector window 新建矢量窗口Start new plot window 新建绘图窗口Start 3D liDAR viewer LiDAR三维浏览器Available files list 当前文件列表Available bands list 当前波段列表Available vectors list 当前矢量列表Remote connection manager 远程连接管理Mouse button descriptions 鼠标按键说明Display information 显示信息Cursor location/value 光标定位/数值信息Point collection 点收集Maximize open displays 显示窗口最大化Link diaplays 关联显示Close all display windows 关闭所有显示窗口Close all plot windows 关闭所有绘图窗口。
envi英文单词
envi英文单词Annotation 注释assign class colors 分配类别颜色Attributes 属性auto predict 自动预测automatically generate tie points 自动生成连接点average of low resolution multispectral file 低分辨率的多光谱文件求平均值Background 背景base image 基准图像basic stats 基本统计basic tools 基本工具Bilinear 双线性Calibration 定标Classification 分类class statistics 类别统计clump classes 聚类color balancing 色彩平衡color normalized 色彩标准化compute new statistics and rotate 计算新的统计和旋转Compute ROI separability 计算感兴趣区域的可分离性compute statistics 计算统计值confusion matrix 混淆矩阵Correlation 相关性Covariance 协方差Customized 自定义data scale factor 数据的尺度因子data value to ignore 忽略数据值Datum 基准面declination diagram 磁偏角的图decorrelation stretch 去相关拉伸DEM resolution 数字高程模型分辨率depth offset 深度偏移edit attributes 编辑属性edit entry 编辑条目edit header 编辑标题Ellipse 椭圆Ellipsoid 椭球体Enhance 加强Execute 运行export layers to ROI 输出层到感兴趣区域Export ROI to n-D Visualizer把感兴趣区域导入到n维可视化工具中Extraction 提取feathering distance 羽化距离Filter 滤波Fixed 固定的flight clearance 飞行相对高度flight elevation 飞行绝对高度focal length 焦距Forward pc rotation 主成分流转正变化Georeference from input geometry 从几何输入参考Georeferenced 地理参考geoid offset 大地水准面偏移grid lines 网格线Histograms 直方图Inverse pc rotation 主成分流转逆变化image sharpening 图像融合import files and edit properties 文件导入和编辑属性interestoperator 兴趣算法Latitude 纬度layer stacking 层堆叠(把多个波段合成一个文件)linear stretch 线性拉伸Longitude 经度mahalanobis distance 马氏距离majority/minority analysis 主要/次要分析mask pixels outside of ROI 对感兴趣区域外进行掩模像素Masking 掩模maximum iterations 最大叠加次数maximum likelihood 最大似然值法merge regions 区域合并minimum correlation 最小相关系数mosaicking 镶嵌motion controls 运动控制multi part 圆滑NDVI 归一化植被指数north arrow type 指北针类型Option 选项Orientation 定位orthorectification 正射纠正output rule images 输出规则图像output stats filename 输出统计数据文件名Overlay 覆盖Parallelepiped 平行六面体pc spectral sharpening 主成分光谱融合principal components 主成分分析Properties 性能photographic stretch 真彩色拉伸pixel based 基于像素point oversampling 一个窗口点采样密度Polygon 多边形Polyline 折线Polynomial 多项式Post classification 分类后处理pushbroom sensor 推扫式传感器Preview 预览Processing 处理Rader 雷达工具Radiance 辐射率Rectangle 矩形Reflectance 反射率registration 几何纠正Resampling 重采样rigorous orthorectification 严格的正射纠正ROI(region of interest) 感兴趣区域RPC (remote procedure call)远程过程调用saturation stretch 饱和度拉伸save template 保存模板scale bars 比例尺select conversion method 选择转换方法select subset from eigenvalues根据特征值选择子集set probability threshold 设置可能性阈值sieve classes 筛选类别spatial subset 空间的子集Spectral 波谱工具spectral subset 光谱的子集Statistics 统计subset date via ROIs 对感兴趣区域进行数据裁剪Supervised 监督threshold 阈值Topographic 地形工具Transform 变换工具Vector 矢量vertical exaggeration 垂直夸张指数view attributes 视图属性warp image 扭曲图像Widch 宽度Window 显示管理Wizard 向导。
ENVI上机指导(二)
ENVI 上机指导(二)——基于6S 模型的遥感数据大气纠正图像预处理流程分为几个步骤:图像的配准、重采样、定标以及大气纠正。
其中,图像配准是做所有工作的前提,是图像的几何纠正。
在进行定性或者定量遥感时都要进行图像配准来确定我们所要研究的目标。
在进行完图像配准(几何纠正)之后,为了使得输出图像的配置与输入图像相对应,因此要进行重采样。
定标以及大气纠正则是进行辐射量纠正的重要的过程,是进行定量遥感不可少的步骤。
辐射定标和大气纠正都属于图像的预处理,辐射定标的目的是把图像上的DN 值转为辐亮度,大气纠正的目的是消除或减少大气对图像的干扰,得到地物的真实反射率。
一、 数据:使用的数据为广东省汕头市的ETM+影像,成像时间为2001年11月22日,2:28:18.000(格林威治时间)。
波段列表:TM1:0.45~0.52 (um) 蓝波段 30m TM2:0.52~0.60 (um) 绿波段 30m TM3:0.63~0.69 (um) 红波段 30m TM4:0.76~0.90 (um) 近红外波段 30m TM5:1.55~1.75 (um) 短波红外波段 30m TM7:2.08~2.35 (um) 短波红外波段 30m二、 辐射定标1. 首先对图像进行辐射定标,将图像的DN 值转化为辐亮度,offset DN gain L +=* (1)其中,λλλλλλmin max min max min max DN DN L L e fullDNrang L L gain −−=−=,,λmin Loffset =每个角标中含有λ的参数表示波段不同则取值不同,具体参数可从卫星影像的头文件中得到。
L 是某个波段光谱辐射亮度;gain 为增量校正系数,offset 为校正偏差量,DN 是图像灰度值,DNmax和DNmin为遥感器最大和最小灰度值Lmax, Lmin分别为最大和最小灰度值所相应的辐射亮度。
2.在ENVI中进行辐射定标——波段运算1)选择 Basic ToolsÆBand Math.2)在标签为 “Enter an expression:” 的文本框内,输入数学表达式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ENVI主菜单中英文对照1.File 文件Open image file 打开图像文件Open vector file 打开矢量文件Open remote file 打开远程文件Open exteral file 打开特定文件Open previous file 最近使用文件Launch ENVI zoom 启动ENVI zoomEdit ENVI header 编辑头文件Generate test data 生成测试数据Data view 数据浏览Save file as 另存为Import from IDL variable 导入IDL变量Export to IDL variable 导出为IDL变量Compile IDL module 编译IDL程序IDL CPU parameters IDL CPU参数设置Tape utilties:磁带工具Read known tape formats 磁带格式读取各种传感器Read/write ENVI tapes ENVI磁带读写Read ENVI tape 磁带读取Write ENVI files to tape 写入磁带Scan tape and customize dump 浏览磁带并保存Dump tape 转储磁带Scan directory list 扫描目录Change output directory 更改扫描目录Save session to script 作业保存Execute startup script 脚本执行Restore display group 显示恢复ENVI queue manager ENVI队列管理ENVI log manager ENVI日志管理Close all files 关闭所有文件Preferences 参数设置Exit 退出2.Basic tools 基本工具Resize data(spatial/spectral) 数据重采样(空间子集/光谱子集)Subset data via ROIs 通过感兴趣区裁剪数据(选取子集)Rotate/flip data 旋转/翻转数据Layer stacking 图层堆栈Convert data(BSQ ,BIL ,BIP ) 数据格式转换Stretch data 数据拉伸Statistics 统计Compute statistcs 统计计算View statistics 查看统计文件Sum data bands 数据波段求和Generate random sample 生成随机样本Using ground truth classification 基于地表真实分类影像Using ground truth ROIs 基于地表真实感兴趣区Spactial statistics 空间统计Compute global spatial statistics 全局统计Compute local spatial statistics 局部统计Change detection 变化检测Measurement tool 量测工具Band math 波段运算Spectral math 光谱运算Segmentation image 图像分割Region of interest 感兴趣区Rool tool 感兴趣区Restore saved ROI file 打开感兴趣区文件Save ROIs to file 保存为感兴趣区文件Delete ROIs 删除感兴趣区Export ROIs to EVF 将感兴趣区导出为EVFExport ROIs to n-D visualizer 将感兴趣区导出进行n维散度分析Export ROIs to training data 将感兴趣区导出为矢量训练样本Output ROIs to ASCII 将感兴趣区导出为ASCII码文件Reconcile ROIs 调整感兴趣区Reconcile ROIs via map 利用地图调整感兴趣区Band threshold to ROI 利用波段阈值定义感兴趣区Creat class image from ROIs 利用感兴趣区生成分类图像Creat buffer zone from ROIs 利用感兴趣区生成缓冲区Compute ROI separability 计算感兴趣区分离度Mosaicking 图像镶嵌Pixel based 基于像素镶嵌Georeferenced 基于地理坐标镶嵌Tiled quickbird product 产品镶嵌Tiled worldview product 产品镶嵌Masking 掩膜Build mask 建立掩膜Apply mask 应用掩膜Preprocessing 预处理Calibration utilities 定标工具AVHRR Landsat calibration landsat 定标Quickbird radianceWorldview radianceFLAASH 大气纠正Quick atmospheric correction 快速大气校正Flat filed 平面场定标Log residuale 对数残差定标IAR reflectance IAR 反射率定标Empirical line 经验线性定标Thermal atm correction 热红外大气校正TIMS radiance 热红外多波段扫描仪定标Calculate emissivity 发射率计算General purpose utilities 通用工具Replace bad lines 坏行修补Dark substract 黑暗像元法Apply gain and offset 应用增益和偏移校正Destripe 多带噪声去除Cross-tarck Illumination correction 轨道光照修正Convert complex data complex转换Convert vax to IEEE vax转换为IEEEData-specific utilities 特定数据处理工具3.Classification 分类Supervised 监督分类Parallelepiped 平行六面体Minimum distance 最小距离法Mahalanobis distance 马氏距离法Maximum distance 最大似然法Spectral angle mapper 波谱角制图Spectral information divergence 光谱信息散度Binary encoding 二进制编码Netural net 神经网络Support vector machine 支持向量机Unsupervised 非监督分类IsodataK-MeansDecision tree 决策树分类Build new decision tree 新建决策树Edit existing decision tree 编辑决策树Execute existing decision tree 执行决策树Endmember collection 端元收集器Create class image from ROIs 利用感兴趣区生成分类图像Post classification 分类后处理Assign class colors 分类颜色设置Rule classifier 规则分类器Class statistics 分类结果统计Change detection statistics 变化监测统计Confusion matrix 混淆矩阵分析Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真实感兴趣区ROC curves ROC曲线Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真实感兴趣区Generate random sample 生成随机样本Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真是感兴趣区Majority/minority analysis 主要/次要分析Clump classes 分类集群Sieve classes 分类筛选Combine classes 分类合并Overlay classes 分类叠加Buffer zone image 缓冲区分析Segmentation image 图像分割Classification to vector 分类结果转换为矢量4.Transform 变换Image sharpening 图像融合HSV融合Color normalized(Brovey) Brovey融合Gram-schmidt spectral shapening Gram-schmidt融合PC spectial sharpening 主成分分析CN spectial sharpening CN波谱融合Band ratios 波段比Principal components 主成分分析Forward PC rotation 正向主成分分析Compute new statistics and rotate 计算统计值分析PC rotation from existing stats 现有统计值分析Inverse PC rotation 反向主成分分析变换Independent components独立主成分分析Forward IC rotation 独立主成分分析Compute new stats and rotate 计算统计值分析IC rotation from existing stats 现有统计值分析IC rotation from existing transformInverse IC rotation 反向独立主成分分析变换MNF rotation MNF变换(最小噪声分离)Forward MNF 正向MNF变换Estimate noise statistics from data 估算噪声分析Previous noise statistics 历史噪声统计Noise statistics from dark data 黑区图像估计噪声Inverse MNF transform 反向MNF变换Apply forward MNF to spectra 波谱应用正向MNF变换Apply inverse MNF to spectra 波谱应用反向MNF变换Color transforms 颜色空间变换RGB to HSVHSV to RGBHLS to RGBHSV to RGBDecorrelation stretch 去相关拉伸Photographic stretch 摄影拉伸Saturation stretch 饱和度拉伸Synthetic color image 合成彩色影像NDVITasseled cap 缨帽变换5.Filter 过滤器Convolutions and morphology 卷积滤波Texture 纹理分析Occurrence measures 概率统计Co-occurrence measures 二阶概率统计Adaptive 自适应滤波Lee Enhanced lee增强 lee 滤波Frost Enhanced frost 增强 forst 滤波Grmma、Kuan、Local sigma、Bit errorsFFT filtering 傅立叶变换滤波Forward EET 正向傅立叶变换Filter definition 滤波器自定义Inverse FFT 反向傅立叶变换6.Spectial 波谱工具SPEAR tools SPEAR工具THOR workflows 流程化高光谱工具Target detection wizard 目标检测向导Spectial libraries 波谱库Spectial slices 波谱切割MNF rotation MNF变换(最小噪声分离)Pixel purity index 纯净像元指数PPIn-Dimensional visualizer n维数据可视化Mapping methods 制图方法Vegetation analysis 植被分析Vegetation suppression 植被抑制SAM target finder with bandmax 基于bandMax的SAM目标查找提取RX anomaly detection RX异常检测Spectral hourglass wizard 波谱沙漏向导Automated spectial hourglass 自动波谱沙漏向导Spectral analyst 波谱分析Multi range SFF 多谱段SFFSMACC endmember extraction SMACC端元提取Spectial math 波谱运算Spectral resampling 波普重采样Gram-schmidt spectial sharpening Gram-schmidt 波谱融合PC spectial sharpening PC波段融合CN spectial sharpening CN波段融合EFFORT polishing EFFORT 波谱打磨FLAASH FLAASH大气校正Quick atmospheric correction 快速大气校正Build 3D cube 建立3D立方体Preprocessing 预处理Calibration utilitiesAVHRRLandsat calibrationQUickbird radianceWorldview radianceFLAASHQuick atmospheric correctionFlat filedLog residualeIAR reflectanceEmpirical lineThermal atm correctionTIMS radianceCalculate emissivityGeneral purpose utilitiesReplace bad linesDark substractApply gain and offsetDestripeCross-tarck illumination correctionConvert complex dataConvert vax to IEEEData-specific utilities7.Map (配准与镶嵌)Registration 几何校正Rigorous orthorectification 严格模型正射校正Orthorectification 正射校正Mosaicking 图像镶嵌Georeference from input geometry 输入几何文件进行几何校正 Georeference SPOT SPOT几何校正Georeference SeaWiFS SeaWiFS几何校正Georeference ASTER ASTER几何校正Georefencece AVHRR AVHRR几何校正Georeference ENVISAT ENVISAT几何校正Georeference MODIS MODIS几何校正Georeference COSMO-SkyMed(DGM) DGM几何校正Georeference RADARSAT RADARSAT几何校正Build RPCs 构建RPCsCustomize map projections 自定义地图投影Convert map projection 地图投影转换Layer stacking 波段组合Map coordinate converter 地图坐标转换ASCII coordinate conversion ASCII坐标转换Merge old “map_proj.txt” file 合并原有map_proj.txt文件GPS-Link GPS连接8.Vector 矢量工具Open vector image 打开矢量文件Create new vector layer 新建矢量层Using existing vector layer 基于现有矢量层Using raster image file 基于栅格图像文件Using user defined parameters 基于用户自定义参数Create world boundaries 创建世界边界Available vectors list 当前矢量列表Intelligent digitizer 智能数字化工具Raster to vector 栅格转矢量Classification to vector 分类结果矢量化Rasterize point data 离散点栅格化Convert contours to DEM 等高线转为DEM9.Topographic 地形工具Open topographic file 打开地形文件Topographic modeling 地形模型Topographic features 地貌特征分析DEM extraction DEM提取DEM提取向导;提取向导;使用现有文件;选择立体控制点对;选择立体匹配点;构建核面图像;提取DEM;编辑DEM;立体3D测量;3D核面指针Create hill shade image 山体阴影图生成Replace bad values 坏值替换Rasterize point data 离散点栅格化Convert contours to DEM 等高线转为DEM3D SurfaceView 3D曲面浏览Outil bathym rie10.Radar 雷达工具Open/prepare radar file 打开/预处理雷达数据文件Calibration 定标Beta noughtSigma noughtAntenna pattern correction 天线阵列校正Slant-to-ground range 斜地校正Incidence angle image 入射角图像Adaptive filters 自适应滤波Texture filters 纹理滤波Synthetic color image 彩色图像合成Polarimetric tools 极化分析工具Synthesize AIRSAR Data AIRSAR数据合成Synthesize SIR-C data SIR-C数据合成Extract polarization sigbatures 极化信号提取Multilook compressed data 数据压缩多视Phase image 相位图像Pedestal height image 图像消隐脉冲高度AIRSAR scattering classification AIRSAR散射机理分析TOPSAR tools TOPSAR工具Open TOPSAR file 打开TOPSAR文件Convert TOPSAR data 打开TOPSAR数据DEM replace bad value DEM坏值替换11.window 窗口Window finder 查找窗口Start new display window 新建显示窗口Start new vector window 新建矢量窗口Start new plot window 新建绘图窗口Start 3D liDAR viewer LiDAR三维浏览器Available files list 当前文件列表Available bands list 当前波段列表Available vectors list 当前矢量列表Remote connection manager 远程连接管理Mouse button descriptions 鼠标按键说明Display information 显示信息Cursor location/value 光标定位/数值信息Point collection 点收集Maximize open displays 显示窗口最大化Link diaplays 关联显示Close all display windows 关闭所有显示窗口Close all plot windows 关闭所有绘图窗口。