simulink仿真环境
SIMULINK仿真集成环境

实验七SIMULINK 仿真集成环境一、实验目的熟悉SIMULINK 的模型窗口、熟练掌握SIMULINK 模型的创建,熟练掌握常用模块的操作及其连接。
二、实验内容(1) SIMULINK 模型的创建和运行。
(2) 一阶系统仿真。
三、实验步骤1.Simulink 模型的创建和运行(1) 创建模型。
①在MATLAB 的命令窗口中输入simulink 语句,或者单击MATLAB 工具条上的SIMULINK 图标,SIMULINK 模块库浏览器。
②在MATLAB 菜单或库浏览器菜单中选择File|New|Model,或者单击库浏览器的图标,即可新建一个“untitle”的空白模型窗口。
③打开“Sources”模块库,选择“Sine Wave”模块,将其拖到模型窗口,再重复一次;打开“Math Operations”模块库选取“Product”模块;打开“Sinks”模块库选取“Scope”模块。
(2) 设置模块参数。
①修改模块注释。
单击模块的注释处,出现虚线的编辑框,在编辑框中修改注释。
②双击下边“Sine Wave”模块,弹出参数对话框,将“Frequency”设置为100;双击“Scope”模块,弹出示波器窗口,然后单击示波器图标,弹出参数对话框,修改示波器的通道数“Number of axes”为3。
③如图A4 所示,用信号线连接模块。
(3) 启动仿真①单击工具栏上的图标或者选择Simulation|Start 菜单项,启动仿真;然后双击“Scope”模块弹出示波器窗口,可以看到波形图。
②修改仿真步长。
在模型窗口的Simulation 菜单下选择“Configuration Parameters”命令,把“Max step size”设置为0.01;启动仿真,观察波形是不是比原来光滑。
③再次修改“Max step size”为0.001;设置仿真终止时间为10s;启动仿真,单击示波器工具栏中的按钮,可以自动调整显示范围,可以看到波形的起点不是零点,这是因为步长改小后,数据量增大,超出了示波器的缓冲。
SIMULINK仿真
后面的每一列对应每一个输入端口,矩阵的第一行表示某 一时刻各输入端口的输入状态。另外,也可以把矩阵分开 来表示,即MATLAB默认的表示方法[t,u],其中t是一维 时间列向量,表示仿真时间,u是和t长度相等的n维列向 量(n表示输入端口的数量),表示状态值。例如,在命 令窗口中定义t和u:
条件执行子系统分为
1.使能子系统
使能子系统表示子系统在由控制信号控制时,控制信号由 负变正时子系统开始执行,直到控制信号再次变为负时结 束。控制信号可以是标量也可以是向量。
建立使能子系统的方法是:打开Simulink模块库中的Ports & Subsystems模块库,将Enable模块复制到子系统模型 中,则系统的图标发生了变化。
阵、结构和包含时间的结构3种选择。“Limit data points to last”用来限定保存到工作空间中 的数据的最大长度。 输出选项(Output options)有: ① Refine output(细化输出) ② Produce additional output(产生附加输出) ③ Produce specified output only(仅在指定 的时刻产生输出)
4.1 初识Simulink—— 一个简单的仿 真实例
在MATLAB的命令窗口输入Simulink,或单击MATLAB主 窗口工具栏上的“Simulink”命令按钮即可启动Simulink。 Simulink启动后会显示如图4.1所示的Simulink模块库浏览 器(Simulink Library Browser)窗口。
U (s)
Kp
Ki s
Kd s
MATLAB-SIMULINK讲解完整版
图3-5 模块的基本操作示例
、按键 、按键 和按键 。
(5) 窗口切换类:包括 6 个按键,分别是按键 、按键
、按键 、按键 、按键 和按键 。
工具栏中各个工具图标及其功能说明见附录 B。
3.2 SIMULINK的基本操作 3.2.1 模块及信号线的基本操作
1. 模块的基本操作 模块是系统模型中最基本的元素,不同模块代表了不同 的功能。各模块的大小、放置方向、标签、属性等都是可以 设置调整的。表3-1列出了SIMULINK中模块基本操作方法 的简单描述。
善模型的外观
标左键
可改变折线的走向, 选中目标节点,按住鼠标左键,拖曳到目标位置,松开鼠
改善模型的外观
标左键
从一个节点引出多 条信号线,应用于不同 目的
方法 1:先按住“Ctrl”键,再选中信号引出点,按住鼠标 左键,拖曳到下级目标模块的信号输入端,松开鼠标左键;
方法 2:先选中信号引出线,然后在信号引出点按住鼠标 右键,拖曳到下级目标模块的信号输入端,松开鼠标右键
如图3-6所示,在模型中加入注释文字,使模型更具可 读性。
图3-6 添加注释文字示例 (a) 未加注释文字;(b) 加入注释文字
3.2.3 子系统的建立与封装 1. 子系统的建立 一般而言,电力系统仿真模型都比较复杂,规模很大,
包含了数量可观的各种模块。如果这些模块都直接显示在 SIMULINK仿真平台窗口中,将显得拥挤、杂乱,不利于用 户建模和分析。可以把实现同一种功能或几种功能的多个模 块组合成一个子系统,从而简化模型,其效果如同其它高级 语言中的子程序和函数功能。
学习使用MATLABSimulink进行系统仿真

学习使用MATLABSimulink进行系统仿真【第一章:引言】在如今数字化时代,仿真已成为系统设计与优化的重要工具。
系统仿真能够帮助工程师在产品开发的早期阶段快速验证设计,预测产品性能,并提供有关系统行为的深入洞察。
由于其易用性和广泛应用领域,MATLABSimulink成为了工程界最受欢迎的仿真工具之一。
本文将介绍如何学习使用MATLABSimulink进行系统仿真,并强调其专业性。
【第二章:MATLABSimulink概览】MATLABSimulink是一个具有图形化界面的仿真环境,可用于建模、仿真和分析各种复杂动态系统。
它使用块状图形表示系统的组成部分,并通过连接输入和输出端口模拟系统的行为。
用户可以通过简单拖拽和连接块状元件来构建仿真模型,并通过调整参数和设置仿真参数来进行模拟分析。
【第三章:基本建模技巧】在使用MATLABSimulink进行系统仿真之前,掌握基本的建模技巧至关重要。
首先,需要熟悉各种块状元件的功能和用途,例如传感器、执行器、逻辑运算器等。
其次,理解信号流和数据流的概念,以及如何在模型中正确地引导信号传递和数据流动。
最后,学习使用条件语句、循环语句等控制结构来实现特定的仿真逻辑。
【第四章:系统模型的构建】在使用MATLABSimulink进行系统仿真时,首先需要根据实际系统的需求和特点进行系统模型的构建。
这包括确定系统的输入和输出,以及分析系统的功能和性能要求。
然后,使用块状元件将系统的各个组成部分建模,并建立各个组件之间的联系和依赖关系。
在构建模型的过程中,要注意选择恰当的块状元件和参数设置,以确保模型的合理性和可靠性。
【第五章:仿真参数设置与分析】为了获得准确且可靠的仿真结果,需要合理设置仿真参数。
常见的仿真参数包括仿真时间、步长和求解器类型等。
仿真时间应根据系统的实际运行时间确定,步长要足够小以保证仿真的精度,而求解器类型则根据系统的特点选择。
完成仿真后,还需要对仿真结果进行分析,以评估系统的性能和进行优化调整。
第五章 SIMULINK仿真基础

设置仿真参数
28
1.解题器(Solver)选项
(1)Simulation time组:设置仿真起止时间。
(2)Solve options组:选择求解器,并为其
指定参数。
– 变步长算法(Variable-step) – 固定步长算法(Fixed-step)。
29
2.数据输入输出选项(Data Import/Export)
6
SIMULINK仿真基础
在工程实际中,控制系统的结构往往很复
杂,如果不借助专用的系统建模软件,则 很难准确地把一个控制系统的复杂模型输 入计算机,对其进行进一步的分析与仿真。
1990年MathWorks公司为MATLAB增加了 用于建立系统框图和仿真的环境 1992年公司将该软件改名为SIMULINK
– None:不做任何反应。 – Warning:提出警告,但警告信息不影响程序的运行。 – Error:提示错误,运行的程序停止。
31
观察Simulink的仿真结果
观察仿真结果的方法有以下几种:
– 将仿真结果信号输入到输出模块“Scope”示波
器、“XY Graph”二维X-Y图形显示器与
“Display”数字显示器中,直接查看。 – 将仿真结果信号输入到“To Workspace”模块中, 再用绘图命令在MATLAB命令窗口里绘制出图形。 – 将仿真结果信号返回到MATLAB命令窗口里,再 利用绘图命令绘制出图形。
25
第二节 SIMULINK功能模块的处理
基本操作包括: 1. 选取模块 2. 复制与删除模块 3. 模块的参数和属性设置 4. 模块外形的调整 5. 模块名的处理 6. 模块的连接 7. 在连线上反映信息
26
实验三 SIMULINK环境下典型环节阶跃响应仿真及分析
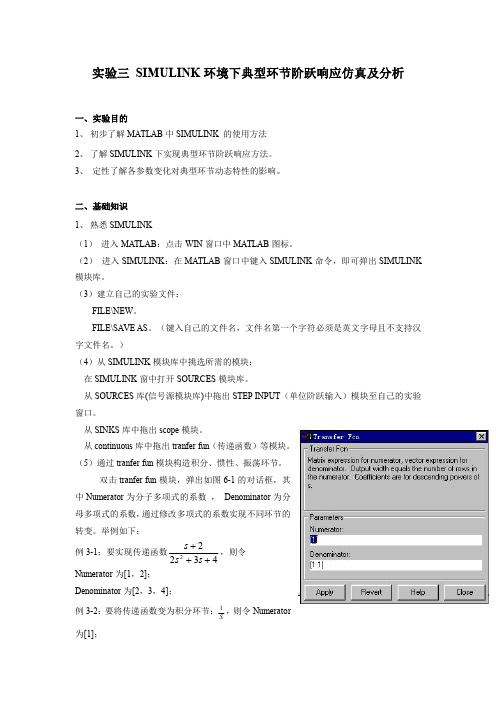
(7)设仿真过程参数:SIMULATION 菜单\PARAMETERS 菜单项。 其中: Start Time 为仿真开始时间, Stop time 为仿真终止时间, Mix Step Size 为仿真最小步长。 Max Step Size 为仿真最大步长。, Tolerance 为仿真精度。 仿真开始前应对 Stop Time 进行修改,如改为 10 秒,50 秒或 200 秒,再根据实际情况进行 调整。
012??ssg积分环节ssg11?微分环节ssg?1比例微分环节pd21??ssg和12??ssg比例积分环节pissg111??和ssg2112??2对典型二阶系统4442???szssg进行仿真分别取00205071观察p?和ts的变化情况
实验三 SIMULINK 环境下典型环节阶跃响应仿真及分析
3.实验总结 初步了解 MATLAB 中 SIMULINK 的使用方法,了解 SIMULINK 下实现典型环节阶跃响应 方法。定性了解各参数变化对典型环节动态特性的影响,实现了实验目的。
S
s2 ,则令 2 s 3s 4
2
为[1];
Denominator 为[1,0]; 例 3-3:要将传递函数变为振荡环节: Denominator 为[1,1,1]; (在此传函中阻尼系数ζ为 0.5) 例 3-4:要将传递函数变为实际微分环节:
1 ,则令 Numerator 为[1]; s s 1
2
s ,则令 Numerator 为[1,0]; s 1
Denominator 为[1,1];
实际微分环节的传递函数为:
K d Td s 1 Td s
分子分母同除以 Td,则为
Kd s s 1 / Td
因此,上式中分子 s 的系数即为 Kd 值,分母中常数项为 Td 的倒数. (6)用鼠标将 step、transfer fcn 及 scope 模块连接。如下图所示:
simulink仿真简单实例
simulink仿真简单实例
一、模拟环境
1、MATLAB/Simulink 设计环境:
在MATLAB中开发Simulink模型,仿真模拟系统,开发系统塑造都可以在这个环境下进行。
2、LabVIEW 设计环境:
LabVIEW允许你以基于可视化技术的开发环境(VI)来创建测试,模拟,监控系统,以及自动化系统的可视化界面。
二、仿真实例
1、基于MATLAB/Simulink的仿真实例:
(1)传统的PID控制器
这是一个利用PID控制器控制速度的例子。
首先,建立一个简单的Simulink模型,包括PID控制器、电机和反馈器件。
之后,你可以调整PID参数,以提高系统的控制能力。
(2)智能控制
这是一个基于智能控制算法的实例。
通过使用神经网络,试图根据输入自动调整PID参数,使系统具有更强的控制能力。
2、基于LabVIEW的仿真实例:
(1)叉车仿真
这是一个使用LabVIEW来模拟电动叉车运行过程的实例。
你可以模拟叉车的启动过程,叉车行驶过程,并开发出任意的叉车控制算法。
(2)汽车仿真
这是一个使用LabVIEW进行汽车模拟的实例。
你可以模拟汽车的动力性能,并开发出任意类型的汽车控制算法,如路径规划算法,自动驾驶算法等。
精通matlab6.5版 8. SIMULINK交互式仿真集成环境
第八第八章章 SIMULINK SIMULINK 交互式仿真集成环境交互式仿真集成环境8.1 引导SIMULINK 是一个进行动态系统建模、仿真和综合分析的集成软件包。
它可以处理的系统包括:线性、非线性系统;离散、连续及混合系统;单任务、多任务离散事件系统。
在SIMULINK 提供的图形用户界面GUI 上,只要进行鼠标的简单拖拉操作就可构造出复杂的仿真模型。
它外表以方块图形式呈现,且采用分层结构。
从建模角度讲,这既适于自上而下(Top-down )的设计流程(概念、功能、系统、子系统、直至器件),又适于自下而上(Bottum-up ) 逆程设计。
从分析研究角度讲,这种SIMULINK 模型不仅能让用户知道具体环节的动态细节,而且能让用户清晰地了解各器件、各子系统、各系统间的信息交换,掌握各部分之间的交互影响。
在SIMULINK 环境中,用户将摆脱理论演绎时需做理想化假设的无奈,观察到现实世界中摩擦、风阻、齿隙、饱和、死区等非线性因素和各种随机因素对系统行为的影响。
在SIMULINK 环境中,用户可以在仿真进程中改变感兴趣的参数,实时地观察系统行为的变化。
由于SIMULINK 环境使用户摆脱了深奥数学推演的压力和烦琐编程的困扰,因此用户在此环境中会产生浓厚的探索兴趣,引发活跃的思维,感悟出新的真谛。
在MATLAB6.x 版中,可直接在SIMULINK 环境中运作的工具包很多,已覆盖通信、控制、信号处理、DSP 、电力系统等诸多领域,所涉内容专业性极强。
本书无意论述涉及工具包的专业内容,而只是集中阐述:SIMULINK 的基本使用技法和相关的数值考虑。
节8.1虽是专为SIMULINK 初学者写的,但即便是熟悉SIMULINK 以前版本的读者也值得快速浏览这部分内容,因为新版的界面、菜单、工具条、模块库都有较大的变化。
第8.2节比较详细地阐述建模的基本操作:通用模块的具体化设置、信号线勾画、标识、模型窗参数设置。
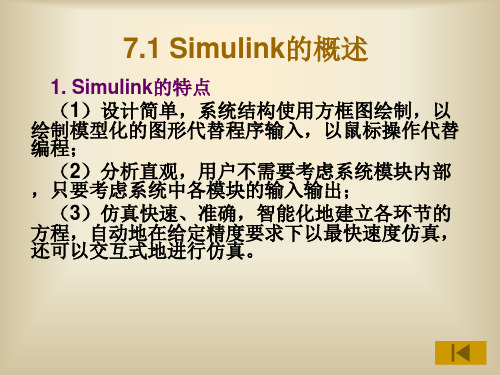
simulink概述

Simulink概述什么是SimulinkSimulink是一种图形化建模和仿真环境,用于多学科设计、建模、仿真和分析动态系统。
它是MATLAB的一个重要组成部分,适用于各种工程领域,如控制系统、通信系统、信号处理、图像处理等。
Simulink通过图形界面和可拖放的模块来建立和调整系统模型,具有直观、易用的特点。
Simulink的基本概念在使用Simulink建模系统之前,我们需要了解一些基本概念。
模块(Blocks)模块是Simulink中的基本构建单元,用于表示系统的各个组成部分。
模块可以是输入、输出、数学运算、逻辑运算、信号处理等等。
模块通过连接线连接在一起,形成系统模型。
系统模型(Model)系统模型是由各种模块构成的系统表示。
通过将各个模块连接在一起,形成一个完整的系统模型,可以用于对系统进行建模、仿真和分析。
信号流(Signal Flow)信号流表示模块之间的数据传递过程。
在Simulink中,信号可以是具有实时连续变化的模拟信号,也可以是离散的采样信号。
信号通过连接线在模块之间传递。
仿真和分析Simulink提供了强大的仿真和分析功能,可以用于验证和优化系统模型。
通过设置仿真参数和初始条件,可以对系统进行仿真,并获取系统在不同时间点的响应和输出。
此外,Simulink还提供了各种分析工具,如频域分析、时域分析、优化等,用于进一步分析和优化系统性能。
Simulink的优点和应用领域Simulink具有许多优点,使得它在工程领域得以广泛应用。
直观易用的建模环境Simulink提供了直观易用的图形界面,使得系统建模变得简单。
通过拖放模块和连接线,用户可以快速建立复杂的系统模型,而无需编写复杂的代码。
多学科设计支持Simulink支持多学科设计,可以在一个环境中集成不同学科的设计要求。
例如,可以将控制系统设计和信号处理设计集成到同一个Simulink模型中,以进行联合仿真和优化。
快速原型开发和验证Simulink的模块化特性使得系统开发变得更加快速和高效。
AMESim与Simulink联合仿真设置步骤与实例
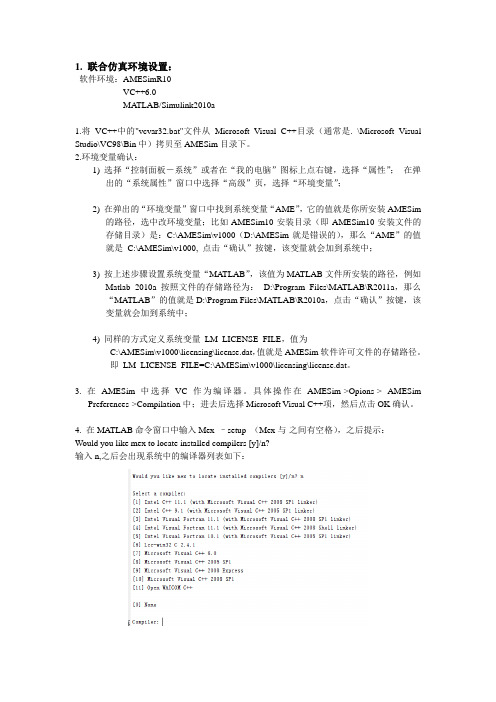
1. 联合仿真环境设置:软件环境:AMESimR10VC++6.0MA TLAB/Simulink2010a1.将VC++中的"vcvar32.bat"文件从Microsoft Visual C++目录(通常是. \Microsoft Visual Studio\VC98\Bin中)拷贝至AMESim目录下。
2.环境变量确认:1) 选择“控制面板-系统”或者在“我的电脑”图标上点右键,选择“属性”;在弹出的“系统属性”窗口中选择“高级”页,选择“环境变量”;2) 在弹出的“环境变量”窗口中找到系统变量“AME”,它的值就是你所安装AMESim的路径,选中改环境变量;比如AMESim10安装目录(即AMESim10安装文件的存储目录)是:C:\AMESim\v1000(D:\AMESim就是错误的),那么“AME”的值就是C:\AMESim\v1000, 点击“确认”按键,该变量就会加到系统中;3) 按上述步骤设置系统变量“MATLAB”,该值为MA TLAB文件所安装的路径,例如Matlab 2010a按照文件的存储路径为:D:\Program Files\MATLAB\R2011a,那么“MA TLAB”的值就是D:\Program Files\MATLAB\R2010a,点击“确认”按键,该变量就会加到系统中;4) 同样的方式定义系统变量LM_LICENSE_FILE,值为C:\AMESim\v1000\licensing\license.dat,值就是AMESim软件许可文件的存储路径。
即LM_LICENSE_FILE=C:\AMESim\v1000\licensing\license.dat。
3. 在AMESim中选择VC作为编译器。
具体操作在AMESim->Opions-> AMESimPreferences->Compilation中;进去后选择Microsoft Visual C++项,然后点击OK确认。
simulink 仿真原理

simulink 仿真原理Simulink是一种用于建立、仿真和分析动态系统的工具,它基于块图的图形化建模和仿真环境。
Simulink中的模型由各种块组成,每个块代表系统中的一个组件或子系统。
通过连接块之间的信号流,可以建立系统的完整模型。
在Simulink中,系统的行为可以用已知的数学和物理原理描述。
通过在块间定义输入和输出之间的关系,可以建立数值模型。
仿真过程可以提供系统的响应和行为,并用于验证模型的正确性。
Simulink提供了多种模型库,包括数学操作、信号处理、控制系统、电力系统等领域。
用户可以根据需要选择适当的块来构建他们的模型。
此外,Simulink还提供了丰富的仿真参数和分析工具,使用户可以对系统进行深入的研究和优化。
使用Simulink进行仿真的过程通常包括以下步骤:1. 建立模型:选择适当的块,并将它们连接在一起,以形成系统模型。
2. 定义输入信号:指定模型的输入信号,可以是常数、波形或来自外部数据源。
3. 配置模型参数:设置块和模型的参数,例如采样时间、模拟时间、仿真器选项等。
4. 运行仿真:开始仿真过程,并观察系统的响应和行为。
5. 分析和优化:使用Simulink提供的工具进行结果分析和系统优化。
6. 生成代码:将模型生成可嵌入系统或实时硬件的代码。
7. 验证和验证:使用实际数据对生成的代码进行验证,并验证系统的正确性。
Simulink的应用广泛,可以用于开发控制系统、信号处理算法、通信系统等各种领域。
通过图形化建模和仿真环境,Simulink大大简化了系统开发和测试的过程,提高了开发效率和质量。
同时,Simulink也与MATLAB密切集成,可以轻松地进行数据分析和可视化。
SIMULINK的模块介绍

SIMULINK的模块介绍1.信号生成模块:这些模块可用于生成不同类型的信号,包括正弦波、脉冲信号、阶跃信号、随机信号等。
通过这些模块,用户可以快速生成自定义的输入信号,用于系统仿真。
2.信号处理模块:这些模块提供了一系列用于信号处理的工具和算法。
例如,滤波器模块可以用于通过滤波器来处理输入信号;傅里叶变换模块可以用于对信号进行频域分析等。
3.系统建模模块:这些模块用于构建系统的数学模型。
用户可以使用这些模块来定义系统的输入、输出、状态等变量,并构建模型方程。
常见的模型包括微分方程模型、状态空间模型等。
4.控制系统设计模块:这些模块用于设计和分析控制系统。
用户可以使用这些模块来设计PID控制器、状态反馈控制器、模糊控制器等,并通过系统的仿真结果来评估和比较不同的控制策略。
5.仿真环境:SIMULINK提供了一个交互式的仿真环境,用户可以在仿真环境中对系统模型进行仿真,观察系统的动态行为。
同时,还可以对系统参数进行调整,以优化系统性能。
6.数据可视化模块:这些模块用于将仿真结果以图形化的形式显示出来。
用户可以使用这些模块绘制系统的输入、输出、状态等变量的曲线图,并对仿真结果进行分析和比较。
7.代码生成模块:SIMULINK还提供了代码生成工具,用户可以将系统模型转换为C语言或其他语言的代码,并在硬件平台上运行。
这使得SIMULINK成为嵌入式系统开发中的重要工具。
总之,SIMULINK提供了一个功能强大的模块化仿真环境,用户可以利用这些模块构建复杂系统的模型,并进行仿真、分析和设计。
通过SIMULINK,用户可以更加直观地理解系统的行为,优化系统的性能,并加速系统开发过程。
它在控制系统设计、信号处理、通信系统设计等领域有着广泛的应用。
simulink电路仿真

Simulink模块编辑窗口菜单栏: Diagnostics页:
工作空间的通讯,即
输入/输出
Diagnostics页: 选择Simulink在仿真中 显示的警告信息的等级
(2)启动仿真
启动方式:
(1) Simulink模块编辑窗口菜单栏“ Simulation /Start”
(2)单击工具栏上的 图标
当前状态
仿真进程
仿真解法
二、Simulink基本操作
创建一个简单的模型大致有以下三个步骤:
1)建立模型窗口并保存为以.mdl为后缀的模型文件; 2)将功能模块由模块库窗口复制到模型窗口,进 行参数设置; 3)连接模块,从而构成需要的系统模型。
1. 对模块的基本操作
移动、复制、删除、转向、改变大小、模块命名、 颜色设定、参数设定、属性设定、模块输入输出信号
一些输出选项
Diagnostics页:
(1) Simulink模块编辑窗口菜单栏“ Simulation /Start” Workspace I/O页:
Workspace I/O页:
管理模型与 MATLAB Simulation /Simulation Parameters
其中包含了许多功能模块,用户只需要知道这些模块的输入输出及模块的功能,将它们连接起来就可以构成所需要的系统模型(以.
6.1 Simulink简介
一、Simulink窗口环境
1. 启动Simulink
在MATLAB窗口的工具栏中单击
在命令窗口中输入命令: >>simulink
图标
2. Simulink浏览器
标题栏 菜单栏 工具栏 模块说明框
基本模块库
已安装专用 模块库
电力电子技术matlab仿真 SIMULINK环境和模型库

2-5
2.1 系统仿真环境 2.1.3 SIMULINK的仿真步骤
(1) 构建仿真模型
(2) 设置模块参数 (3) 设置仿真参数
(4) 启动仿真
(5) 观测仿真结果
第2章 SIMULINK环境和模型库
2-6
2.1 系统仿真环境
步骤 1 :在 SIMULINK 的模型库中分别提取阶跃给定(Step) 、传 递函数 (Transfer Fcn) 和示波器 (Scope) 3 个模块,并连接组成仿真模型。 步骤 2: 模块赋值。分别双击阶跃给定和传递函数两个模块,设定其参数。
第2章 SIMULINK环境和模型库
2-8
2.1 系统仿真环境 2. 1. 4 系统模型的保存和调用
保存:save 后缀:.mdl
调用:open
第2章 SIMULINK环境和模型库
2-9
2.1 系统仿真环境 2. 1.5 SIMULINK 的仿真算法
一般采用缺省可变步长ode45算法,电力电子电 路包含非线性元件,可以选择包含Stiff模型的算法。
2. 图形缩放 区域放大、X轴向放大、Y轴向放大
第2章 SIMULINK环境和模型库
2-12
2. 1.6 示波器的使用和数据保存
3. 坐标轴范围
以在 Scope 窗口的图形部分点击鼠标右键,在弹出 的功能菜单中选择“axes properties∙∙∙” 项,则可以打开 Y 轴范围限制的对话框.
4. 浮动示波器 (floating scope) 不需要将示波器与外部模块用线连接,就可以选择示 波器的显示信号,使用方便。
simulink环境和模型库21021系统仿真环境16示波器的使用和数据保存simulink环境和模型库21116示波器的使用和数据保存时间范围auto自动设置为系统仿真参数中的起止时间数据点数不选时所有数据都显示图形缩放区域放大x轴向放大y轴向放大simulink环境和模型库21216示波器的使用和数据保存scope窗口的图形部分点击鼠标右键在弹出的功能菜单中选择axesproperties项则可以打开浮动示波器floatingscope不需要将示波器与外部模块用线连接就可以选择示波器的显示信号使用方便
从入门到精通教程第章Simulink仿真环境
7.2 Simulink的工作环境
在MATLAB的命令 窗口输入“simulink” ,或单击工具栏中的 图标,就可以打开 Simulink模块库浏览 器(Simulink Library Browser)窗口。
7.2.1 一个简单的Simulink实例
例7-1 将一个阶跃输入信号送到积分环节 ,并将积分后的信号送到示波器显示。 1. 创建空白模型 2. 添加模块 3. 添加连接 4. 仿真 5. 保存模型
9. 模块的属性设置 (1)“General”选项卡 (3)调用函数(Callbacks) (2)“Block Annotation”选项卡
7.4 Simulink在控制系统中的应用实例
例7-8 创建一个Simulink模型使用PID控 制器控制三阶系统,查看其输出响应。
练习
7.5子系统与封装 7.5.1 创建子系统
2. 触发子系统 触发子系统是指当触发事件发生时开始执 行子系统。与使能子系统相类似,触发子系 统的建立要把Signals & Systems模块库中 的Trigger模块拷贝到子系统中。
例 利用触发子系统原理将一锯齿波转换成方波。 操作步骤如下: (1)用Signal Generator、Subsystem和Scope模块构成 一子系统,双击Signal Generator模块图标在Wave from 的下拉列表框中选择sawtooth,即锯齿波。 (2)将上例中的Enable模块换成Trigger触发模块。双击 该模块并选Trigger type触发事件形式为either,即上跳沿 或下跳触发。 (3)完成新建模型窗口中各模块间的连接,并存盘。 (4)双击示波器模块,然后选择Simulink菜单中的start命 令,就可看到方波。
simulink仿真原理

simulink仿真原理Simulink仿真原理Simulink是一种基于模块化的多域仿真环境,它使用图形化界面和模块化建模方法,可以对各种系统进行仿真和建模。
Simulink的仿真原理是通过将系统建模为一个或多个模块,并通过连接这些模块来描述系统的行为和交互。
Simulink仿真原理的基础是信号流图。
在信号流图中,模块代表系统的组成部分,信号则代表模块之间的相互作用。
通过连接模块和传递信号,可以模拟系统的运行过程,并观察系统的行为和性能。
Simulink中的模块被称为块,每个块代表一个特定的功能或算法。
这些块可以是基本的数学运算、逻辑运算,也可以是复杂的控制算法或物理模型。
通过选择合适的块,并将它们连接在一起,可以构建出完整的系统模型。
Simulink中的信号可以是连续的,也可以是离散的。
连续信号可以表示系统的物理量,如电压、速度等;离散信号则表示系统的状态或事件,如开关状态、传感器触发等。
通过将连续信号和离散信号连接在一起,可以模拟出系统的实时行为。
Simulink仿真原理的关键之一是求解器。
求解器是Simulink用于计算模型输出的数值方法。
Simulink提供了多种求解器,可以根据系统的特点和仿真需求选择合适的求解器。
常用的求解器有Euler法、隐式法、变步长法等。
通过选择合适的求解器,可以保证系统模型的精度和稳定性。
Simulink仿真原理的另一个关键是仿真参数。
仿真参数是指控制仿真过程的各种设置,如仿真时间、步长、停止条件等。
通过调整这些参数,可以控制仿真的速度和精度,并满足不同仿真需求。
Simulink仿真原理的优势在于其图形化建模和直观的界面。
相比于传统的编程方法,Simulink可以更快速地建立系统模型,并对模型进行可视化调试和验证。
Simulink还支持多领域仿真,可以对多种物理系统、控制系统、通信系统等进行建模和仿真。
Simulink仿真原理是通过图形化建模和模块化设计,通过连接模块和传递信号来描述系统的行为和交互。
simulink 的用法

simulink 的用法
Simulink是一种图形化建模和仿真环境,用于设计、建模和仿真动态系统。
它是MATLAB软件的一部分,提供了一种直观的方法来构建和模拟各种系统,包括控制系统、通信系统、图像处理系统等。
Simulink的用法包括以下几个步骤:
1.打开Simulink:使用MATLAB软件打开Simulink工具包,或者直接在MATLAB命令窗口中输入"simulink"打开。
2.创建模型:在Simulink界面上使用不同的模块和线段,构建系统模型。
模块可以代表各种组件,如传感器、控制器、执行器等,线段则表示信号和数据流。
3.连接模块:使用适当的线段连接不同的模块,建立模型中各个组件之间的数据流和控制逻辑。
4.参数设置:对模型中的各个模块进行参数设置,以确保其行为与实际系统相符。
5.仿真运行:运行模型进行仿真,观察系统的动态行为和输出结果。
可以通过修改模型参数、调整模型结构来进一步优化和改进系统设计。
除了以上基本用法,Simulink还提供了许多高级功能,如模型验证、优化设计、代码生成等。
模型验证功能可以检测和解决模型中的错误和问题。
优化设计功能可以通过自动搜索和调整模型参数,实现系统性能的最优化。
代码生成功能可以将Simulink模型转换为C代码或其他可执行文件,以便在嵌入式系统中进行实时部署。
总的来说,Simulink提供了一种直观的图形化建模方法,将系统设计过程可视化,使得系统建模和仿真更加简单和高效。
第12章 Simulink动态仿真集成环境

12.2.1 Simulink的基本模块 的基本模块 Simulink的模块库提供了大量模块。单击模块库浏 的模块库提供了大量模块。 的模块库提供了大量模块 览器中Simulink前面的“+”号,将看到 前面的“ 号 将看到Simulink 览器中 前面的 模块库中包含的子模块库, 模块库中包含的子模块库,单击所需要的子模块 在右边的窗口中将看到相应的基本模块, 库,在右边的窗口中将看到相应的基本模块,选 择所需基本模块, 择所需基本模块,可用鼠标将其拖到模型编辑窗 同样,在模块库浏览器左侧的Simulink栏上 口。同样,在模块库浏览器左侧的 栏上 单击鼠标右键,在弹出的快捷菜单中单击Open 单击鼠标右键,在弹出的快捷菜单中单击 the ‘Simulink’ Libray 命令,将打开 命令,将打开Simulink基本 基本 模块库窗口。单击其中的子模块库图标, 模块库窗口。单击其中的子模块库图标,打开子 模块库,找到仿真所需要的基本模块。 模块库,找到仿真所需要的基本模块。
12.2.3 模块的连接 1.连接两个模块 . 2.模块间连线的调整 . 3.连线的分支 . 4.标注连线 5.删除连线 .
12.2.4 模块的参数和属性设置 1.模块的参数设置 . Simulink中几乎所有模块的参数都允许用户进行设置,只要 中几乎所有模块的参数都允许用户进行设置, 中几乎所有模块的参数都允许用户进行设置 双击要设置的模块或在模块上按鼠标右键并在弹出的快捷 菜单中选择相应模块的参数设置命令就会弹出模块参数对 话框。该对话框分为两部分,上面一部分是模块功能说明, 话框。该对话框分为两部分,上面一部分是模块功能说明, 下面一部分用来进行模块参数设置。 下面一部分用来进行模块参数设置。 同样,先选择要设置的模块,再在模型编辑窗口Edit菜单下 同样,先选择要设置的模块,再在模型编辑窗口 菜单下 选择相应模块的参数设置命令也可以打开模块参数对话框。 选择相应模块的参数设置命令也可以打开模块参数对话框。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2021/4/13
Simulink仿真环境
25
• 仿真程序的启动也可以使用工具栏上的启 动按钮。如图示。
2021/4/13
Simulink仿真环境
26
6.4.2结构图系统仿真
• 下面以例题说明结构图系统仿真工作的步 骤。
• 例6.1 控制系统结构图如图所示
• 用结构图仿真方法求系统的阶跃响应。
2021/4/13
1)激活Simulink
2)激活信号源模块组Source,单击需要的信号单元 图标,将选中的信号单元图标拖入刚才我们新打 开的用户文件myblock.mdl窗口的空白处释放。
3)激活线性单元模块组Linear,单击需要的线性单 元图标,如传递函数等,将其拖入用户文件 myblock.mdl窗口的空白处释放。
Simulink仿真环境
19
1. 仿真算法的选择
• Simulink为用户提供了多种仿真算法。解 算器Sovler options部分的下拉列表(图 示),可以选择步长,变步长或者定步长。
• 由算法选择下拉列表可以选择各种仿真算 法。默认算法是ode45(4阶Runge-Kutta 法),关于其它算法的说明可以查阅 Matlab语言的PDF文件);
• 3)执行仿真,的到返回平台的变量值。
2021/4/13
Simulink仿真环境
34
2021/4/13
Simulink仿真环境
35
5.4 子系统与模块封装技术
子系统概念及构成方法 模块封装方法 模块集构造
2021/4/13
Simulink仿真环境
36
• 在系统建模与仿真中,经常遇到很复杂的 系统的结构,难以用一个单一的模型框图 进行描述。通常需要将这些框图分解成多 个具有独立功能的子系统。另外,用户也 可以将一些常用的子系统封装成一些模块, 这些模块的使用方法类似于标准的Simulink 模块,当然,用户也可自己开发一些模块 做成自己的模块组或模块集。
• Testpoint signals only 测试点信号(由结构图激 活句柄设定,单个信号)
• Selected signals only 设定信号(由all signals列 表选项,多个信号)
• (图略)
2021/4/13
Simulink仿真环境
33
• 例6.3 将仿真结果返回到Matlab命令平台。
• 双击信号源图标,出现信号参数设置窗口, 如图(下页)所示。
2021/4/13
Simulink仿真环境
13
• 上部为模块功能说明,图例为“step”、“output a step”,说明该模块名称为Step;模块功能为输出 阶跃信号。下面4行为参数设置行,分别为:
• Step time 阶跃信号开始时间
2021/4/13
Simulink仿真环境
10
2021/4/13
Simulink仿真环境
11
6. 3 Simulink仿真参数设置
• 结构图设计完成以后,还不能马上作系统 仿真,需要设置相应的仿真参数。参数设 置的内容和步骤如下所述。
2021/4/13
Simulink仿真环境
12
6.3.1输入信号的参数设置
16
6.3.3仿真参数设置
• 用鼠标选择主菜单的Simulation选项,出现 下拉菜单如图示。
2021/4/13
Simulink仿真环境
17
• 选择Simulation Parameters选项,打开仿 真参数设置窗口,如图示。
2021/4/13
Simulink仿真环境
18
• 该窗口为多页窗口,各页内容为:
① 选择仿真算法。初始可以用默认算法 (ode45)
2021/4/13
Simulink仿真环境
29
② 确定仿真开始时间,如0s(默认值); ③ 确定仿真结束时间,如10s(默认值);
④ 最大仿真步长和最小仿真步长。可以由仿 真要求确定。默认值为自动,即
Min Step Size (默认值为0.0001) Max Step Size (默认值为10) ⑤ 设定仿真精度Tolerance(默认值为1e-3)
2021/4/13
Simulink仿真环境
5
• 用上述任何一种方法创建新文件后,即可 作新文件存储操作,即选择File中的Save as(另存为),将文件命名为myblock.mdl 存入用于程序存储区。
2021/4/13
Simulink仿真环境
6
6.2.2 结构图程序设计
• 按照系统结构所需要的模块单元,构成系统结构 图。具体操作如下:
完成上述仿真参数设定后,即可进行控制系 统的仿真了。
2021/4/13
Simulink仿真环境
30
• (3)启动仿真,双击示波器图标,即可观 察到仿真结果,如图示。
2021/4/13
Simulink仿真环境
31
• 例6.2 浮空示波器观察系统的各种信号的值。
• 1)打开示波器窗口。
• 2)示波器浮空设置。单击工具栏的浮空示 波器按钮(Floting scope)将示波器设置为 浮空工作状态。
• Solver
解算器
• Workspace I/O Matlab命令平台I/O
• Diagnostics 诊断
• Advanced
高级
• Real-Time Workshop 实时平台
• 以下就解算器页面的仿真参数设置作简要 说明,其他页面的使用方法,可以查阅 Matlab语言的帮助系统。
2021/4/13
• Initial value 初始幅值大小
• Final value 终止幅值大小
• Sample time 采样间隔时间
• 由键盘输入设定值后,单击OK键确认,窗口即关 闭。
• 其它信号输入单元如正弦信号单元等,其参数设 置窗口类似。
2021/4/13
Simulink仿真环境
14
6.3.2 示波器的参数设置
2021/4/13
Simulink仿真环境
7
4)激活输出显示模块组sinks,拖动显示输 出单元。
5)在用户文件窗口上,用鼠标在各拖入的单 元之间作连线。方法是:将鼠标移至前级 单元的输出口上,按住鼠标,再将鼠标箭 头拖至后级单元的输入端,释放鼠标,就 完成了模块之间的连接。连线完成后的一 个控制系统的结构图程序如图所示。
2021/4/13
Simulink仿真环境
37
5.4.1 子系统概念及构成方法
• 要建立子系统,首先要给子系统设置输入 和输出端子。子系统的输入端由Sources模 块组中的In来表示,输出端由Sinks模块组 中的Out来表示。
• 当然,如果已经建立起一个框图,则可以 将想建立子系统的部分选中(鼠标左键单 击要选中区域的左下角,拖动鼠标在想选 中区域的右上角处释放,则选中该区域的 所有模块和其连接关系)。
23
6.4 结构图控制系统仿真 6.4.1仿真的启动与停止
• 用鼠标选择主菜单的Simulation选项,出现 下拉子菜单,如图。
2021/4/13
Simulink仿真环境
24
• 选中Start仿真即开始,至设定的仿真时间 长度即停止。在长时间的仿真过程中,该 选项变为Pause/Continue,用于暂停或继 续。选项Stop可以用于长时间仿真的停止 执行。
2021/4/13
Simulink仿真环境
32
• 3)设置观测状态。 • 单击工具栏的信号选择按钮(Signal selection),
可选的四种浮空观测方式为:
• All signals 所有信号(所有模块输出) • Named signals only 指定信号(由all signals列表
指定,多个信号)
• Stop Time 10.0 3. 其它参数设置
• 其它参数设置项还有仿真步长选择、输出选择、 允许误差设置等。其中,相对误差(Relative Tolerance)设置的默认值为:
• Relative Tolerance 1e-3 计算精度为0.001
2021/4/13
Simulink仿真环境
2021/4/13
Simulink仿真环境
38
• 用鼠标选择了预期的子系统构成模块和机 构之后,就可用Edit-Create Subsystem菜 单项来建立子系统。若没有指定输入和输 出端口,则Simulink会自动将流入选择区域 的信号依次设置为输入信号,将流出的信
号设置成输出信号,从而自动建立起输入 和输出端口。
• 通过结构图的仿真参数设置,可以将结构图仿真 结果返回到Matlab命令平台,用于作图与其它分 析处理。具体步骤如下:
• 1)单击仿真结构图Simulation菜单的Simulation Parameters,打开仿真参数设置窗口,选择并打 开Workspace I/O选项卡。如图示(下页)
• 2)选择Save to Workspace的选项,并指定变量 名称,tout和xout分别为返回的时间变量名称是输 出变量名称。
New Model,打开一个名为untiled的结构图 程序文件窗口,
2021/4/13
Simulink仿真环境
3
2021/4/13
Simulink仿真环境
4
• 2.方法二
• 在Matlab命令平台打开File,选择New来建 立新文件。这时出现新建文件类型选项:
• 选项一用于建立M文件,选项2用于建立图 形文件,选项3用于加你了结构图文件。选 中第3向后,即出现一个与方法一相同的名 称为untiled的新建结构图文件的窗口。
• 双击示波器图标,即出现示波器窗口,如 图所示。该窗口用于显示系统的时间响应 曲线。