基于性能导航_PBN_技术介绍_蔡清毅
基于性能的导航(PBN)是国际民航组织(ICAO)在整合各国区...
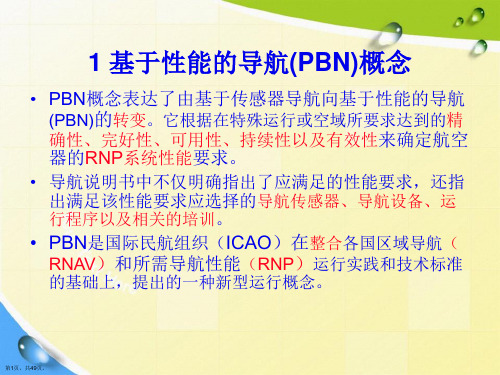
序基于性能的导航(PBN)是国际民航组织(ICAO)在整合各国区域导航(RNA V)和所需导航性能(RNP)运行实践和技术标准的基础上,提出的一种新型运行概念。
它将飞机先进的机载设备与卫星导航及其他先进技术结合起来,涵盖了从航路、终端区到进近着陆的所有飞行阶段,提供了更加精确、安全的飞行方法和更加高效的空中交通管理模式。
PBN是飞行运行方式的重大变革,能有效促进民航持续安全,增加空域容量,减少地面导航设施投入,提高节能减排效果,是我国从航空大国向航空强国迈进,建设新一代航空运输系统的核心技术之一。
中国民航局决定按照ICAO的有关要求和亚太地区实施规划,加快这项技术的应用,组织全面实施。
本路线图结合我国实际情况,明确了中国民航从当前到2025年期间实施PBN的政策和总体工作计划,为各利益相关方提供指南,促进全球标准统一和国际合作。
希望有关各方在该路线图的具体实施过程中,提出修正意见,使之不断更新完善,适应中国民航快速发展的需求,并成为中国民航航行新技术发展的标志性规划和国际航空界的蓝图范本。
民航局PBN实施领导小组组长目录1. 背景..................................................................................................................................- 1 -1.1 PBN概念..................................................................................................................- 1 -1.2 作用及优势.............................................................................................................- 2 -1.3 ICAO要求................................................................................................................- 2 -2. PBN实施路线图目的.......................................................................................................- 3 -2.1 明确决策和计划.....................................................................................................- 3 -2.2 帮助沟通和理解.....................................................................................................- 3 -2.3 确立职责和分工.....................................................................................................- 3 -3. 中国民航运输系统..........................................................................................................- 4 -3.1 现状.........................................................................................................................- 4 -3.2 挑战.........................................................................................................................- 4 -3.3 未来发展.................................................................................................................- 6 -4. 实施具体工作..................................................................................................................- 7 -4.1 总体目标.................................................................................................................- 7 -4.2 关键任务.................................................................................................................- 7 -4.2.1 规章标准的制定...........................................................................................- 7 -4.2.2 航路规划和飞行程序设计...........................................................................- 7 -4.2.3 航空运营人运行能力的建立.......................................................................- 8 -4.2.4 宣传与培训...................................................................................................- 8 -4.2.5 国际协调.......................................................................................................- 8 -5. 实施时间表......................................................................................................................- 9 -5.1 近期(2009-2012).............................................................................................- 9 -5.2 中期(2013-2016)...........................................................................................- 10 -5.3 远期(2017-2025)............................................................................................- 11 -6. 通用航空........................................................................................................................- 12 -6.1 现状.......................................................................................................................- 12 -6.2 发展策略...............................................................................................................- 13 -7. 航空器能力....................................................................................................................- 14 -7.1 现有机队总体情况...............................................................................................- 14 -7.2 机载设备标准.......................................................................................................- 16 -7.3 机队PBN能力现状...............................................................................................- 16 -7.4 机队改装计划.......................................................................................................- 17 -8. 导航基础设施................................................................................................................- 19 -8.1 现状.......................................................................................................................- 19 -8.1.1 传统导航设施.............................................................................................- 19 -8.1.2 GNSS导航设施............................................................................................- 20 -8.2 GNSS未来发展......................................................................................................- 22 -8.2.1“伽利略”卫星导航系统...........................................................................- 22 -8.2.2 GPS现代化...................................................................................................- 22 -8.2.3 GLONASS现代化.......................................................................................- 22 -8.2.4 “北斗”卫星导航系统..................................................................................- 23 -8.3 导航设施规划策略...............................................................................................- 24 -8.3.1 过渡计划.....................................................................................................- 24 -8.3.2 地基导航设施.............................................................................................- 24 -8.3.3 GNSS导航设施............................................................................................- 24 -9. 安全实施原则................................................................................................................- 25 -10. PBN与其他技术的融合及展望...................................................................................- 26 -10.1 通信技术.............................................................................................................- 26 -10.2 监视技术.............................................................................................................- 26 -10.3 其他进近着陆能力.............................................................................................- 27 -10.3.1 “北斗”终端导航........................................................................................- 27 -10.3.2 有垂直引导的进近(APV)........................................................................- 27 -10.3.3 GBAS着陆系统(GLS)..........................................................................- 27 -11. 路线图的修订..............................................................................................................- 29 - 附件A-PBN导航规范简介..............................................................................................- 30 - 附件B-PBN整体规章标准框架......................................................................................- 32 - 附件C-国际PBN实施整体概况......................................................................................- 33 - 附件D-术语......................................................................................................................- 35 - 致谢.....................................................................................................................................- 38 -1. 背景1.1 PBN概念在航空飞行中,传统导航是利用接收地面导航台信号,通过向台和背台飞行实现对航空器的引导,航路划设和终端区飞行程序受地面导航台布局与设备种类的制约。
《现代导航技术与方法》6 基于性能的导航(PBN)

直线航线缩短飞行距离 定义随机航线,增加飞行的灵
活性 缩小间隔,提高空域利用率 增加平行航路,提高流量 减少陆基导航台站建设 采用卫星导航,运行覆盖全球
6.3.6.3 PBN作用及运行优势
01)(2011年4月19日)
第6章 基于性能的导航
6.3 基于性能的导航概念
6.3.1 PBN概念
RNAV概念
区域导航(RNAV)是一种导航方式,允许航空器在陆基导 航设施信号覆盖范围之内,或者在机载自主导航设备的工 作能力范围之内,或利用GNSS或二者组合,沿任意期望 的路径飞行。
RNAV运行特点
PBN运行中,卫星导航系统作为主用导航设施 陆基导航设施在PBN运行中,可能有离台距离使用限
制等要求,并且一般无法满足RNP APCH等运行要求 NDB台不能用于PBN运行
第6章 基于性能的导航
6.4 机载性能监视与告警
6.4 机载性能监视与告警
PBN运行的主要目的是严格控制和充分发挥航空器 的导航性能,以符合不同导航规范下航路、终端区、进 近等各飞行阶段飞行运行的要求,进一步提高飞行运行 安全性和效率。
导航规范是一组对航空器和机组人员的要求,以满足在 规定空域概念下,沿指定航路、仪表飞行程序飞行运行 时导航应用的需要。
导航规范内容
区域导航系统在精度、完好性、连续性和可用性方面必备的性能; 为达到所需性能,区域导航系统需要具备的功能; 整合到区域导航系统中,能满足所需性能的可用导航传感器; 为达到区域导航系统运行性能,必备的飞行机组程序和其他程序。
——
不低于75m (250ft)
不小于800m 不小于800m
设施 仅有航向台(ILS下滑台GP不工作)
PBN

来实施 的一种G NS S 进近程序 , 在一 些发达国家得 到了非常广 泛的 应用。 但是 , 由于其对于G P S 卫 星的依赖性较大 , 并不适合我 国的基 本 国情 , 因此, 我国重点研究 的是AP V中的B a r o - VNA V, 即气压垂
mi l e 以内。
在飞行过程 中, G NS S 会根据飞机距离机场基准点 的距离大小 , 民航 组织在 对各 国区域导航( R NAV ) 以及所需性能导航( RNP ) 的技 对工作模式进行 自动切换 。 同时 , G N S S 接 收机 的工作模 式不同, 则 术标 准和实践经验进行从分整合的基础上, 提 出的一种新 的运行概 其所对应的RAI  ̄ 皓 警 门限以及航道偏离指示器 的满偏值 也存在着 念, 是世界 民航 C NS / AT M系统 的重要 组成部分 。 很大的差异 , 如表1 所示 : 在P B N导航中, 存在着三个基本的 因素, 即导航规范、 导航 应用
重视 。
Байду номын сангаас
1 P B N导航概述
P B N导航 即基于性能的导航 , 是一种新型的导航技术 , 是 国际
( 1 ) 航 路模式 : 距离机场基准 点3 0 n mi l e 以外 , ( 2 ) 终端 区模 式 : 距离机场基 准点3 0 n mi l e 以内到距 离最 后进近定位点前2 n mi l e I ( 3 ) 进近模 式 : 从最 后进近定位点前 2 n mi l e 到距离机 场基 准点3 0 n
C h i n a S c i e n c e & T e c h n o l o g y O v e r v i e w 学 术 研 究
PBN介绍
BIG WHITE BEAR JET
© 2012 Copyright Big White Bear Jet Co., Ltd. All Rights Reserved
PBN实施依据
ICAO第36界大会决议中指出:“各缔约国应在2009年完成PBN 实施计划,确保2016年之前,以全球一致和协调的方式过渡到 PBN运行。”具体要求如下: 各缔约国应制定实施规划,按照规定的进度在航路和终端区实 施RNAV和RNP运行; 各缔约国应把具有垂直引导的进近程序(APV)作为进近的主 要方式或者精密进近的备份程序,到2016年在所有跑道实施APV。
BIG WHITE BEAR JET
© 2012 Copyright Big White Bear Jet Co., Ltd. All Rights Reserved
RNP和RNAV的区别
RNP增加了机载监视和告警功能:RNP运行时,航空器的 飞行管理系统具有自主监视当前导航系统性 能的能力,并 能向飞行员显示是否达到了 预定运行要求(监视和告警)。
BIG WHITE BEAR JET
© 2012 Copyright Big White Bear Jet Co., Ltd. All Rights Reserved
RNP(所需导航性能)的概念
RNP是RNAV对在规定空域内运行所需要的导航性能的描述,但具 有机载监视和告警功能。如果航空器偏离了预计飞行航迹,则自 动发出告警。或者说,RNP 是一种航空器能自主确定导航包容度 的 RNAV 运行。 RNP的类型根据航空器至少有95% 的时间能够达 到预计导航性 能精度的数值来确定。 RNP的使用能使精度更高的导航能力得到应用,因此,在进近阶 段和复杂地形地区一般使用RNP进近或进离场。 RNP需要结合GNSS使用,以便其获得自主监视能力。
航空维修培训特殊运行PBN培训课件(RNPAR)
军事航空领域
RNPAR技术还可应用于 军事航空领域,提高飞行 器的导航性能和作战能力 。
03
rnpar运行程序
rnpar运行程序流程
提交飞行计划
将飞行计划提交给空中交通管 理部门审批。
执行飞行计划
按照飞行计划执行航班任务。
定义飞行计划
根据航班信息和航路点,制定 飞行计划。
获取行计划批准
等待空中交通管理部门审批, 获得批准后继续执行。
PBN的起源可追溯到20世纪90年代,当时由于航空运输业的快速发展,传统的航 路导航方法已经无法满足需求,因此基于性能的导航概念逐渐得到推广和应用。
pbn技术发展历程
2000年,国际民航组织(ICAO)开始推广基于性能的导航概念,并制定了相关标 准和建议。
2005年,中国民航局(CAAC)开始引入PBN概念,并逐步推广和应用。
rnpar维护程序细节
PBN运行规定
介绍PBN运行的基本规定和要求,包括飞行计划、导航设施、 飞行员授权等方面的规定。
RNP和RNAV原理
详细介绍RNP和RNAV的原理和技术,包括航路设计、导航数据 库、飞行控制等方面的内容。
rnpar维护要点
介绍rnpar维护的基本要点和要求,包括硬件检查、软件更新、 数据备份等方面的内容。
rnpar维护程序实例
案例一
rnpar故障排除
故障现象
某航班在执行RNP程序时,机载导 航系统出现故障,无法正常工作。
故障排除
通过检查硬件连接、软件更新和数据 备份等步骤,最终排除了故障,保证 了航班的正常运行。
案例二
rnpar应用实例
应用场景
某航空公司使用rnpar进行区域导航 ,提高了航班效率和准确性。
基于性能导航_PBN_技术研究_王党卫

2013年2月第1期现代导航・5・基于性能导航(PBN)技术研究王党卫(中国电子科技集团公司第二十研究所,西安 710068)摘要:本文首先介绍了RNA V、RNP和PBN的概念,以及相互关系,并分析了PBN在国内外的发展概况。
最后,探讨了我国民航在PBN方面的发展需求和技术趋势。
关键词:基于性能导航;区域导航;所需导航性能中图分类号:P228.4 文献标识码:A 文章编号:1674-7976-(2013)01-005-06 Research of Performance-Based Navigation TechnologyWANG DangweiAbstract:This paper introduces the concept of RNA V, RNP and PBN and their relationship between them, analyzes its development at home and abroad, and discusses the development needs and the technology trend of the PBN of Chinese civil aviation.Key words: Performance-Based Navigation (PBN); Regional Navigation; Required Navigation Performance (RNP)随着民用航空产业的发展和航班架次的剧增,空中交通流量日益饱和,航路和终端区空域资源趋于紧张。
空域资源的改善无法满足航班流量的增加,现已成为导致航班延误的主要原因之一。
为了进一步提高空域容量利用率和运行效率,满足民用航空运输飞行量不断增加的需求,一种新的航行技术应运而生——基于性能导航技术(Performance Based Navigation,PBN)。
随着航空器机载设备能力的提高以及卫星导航等先进技术的不断发展,国际民航组织(International Civil Aviation Organization,ICAO)提出了PBN的概念,发布了基于性能导航手册(Performance Based Navigation Manual,PBN手册),用以规范区域导航的命名、技术标准,指导各国实施该新技术,并已经与各缔约国和有关国际组织达成共识,将PBN作为未来全球导航技术的主要发展方向。
导航系统-基于性能的导航PBN

PBN需要飞行员具备较高的技术水平 和经验,同时需要完善的导航数据库 支持。
03
导航系统技术
03
导航系统技术
定位技术
01
02
03
卫星定位
通过接收来自GPS、 GLONASS等卫星的信号, 确定地面接收点的位置信 息。
无线信号定位
利用无线网络信号,如 Wi-Fi、蓝牙等,进行定 位。
混合定位
实时通信与监控
pbn导航系统可以实现无人机与控制中心之间的实时通信和监控, 确保无人机配送的安全性和可靠性。
无人机配送
飞行路径规划
pbn导航系统可以用于无人机配送的飞行路径规划,确保安全、 快速地完成配送任务。
禁飞区管理
通过pbn导航系统,无人机可以自动识别和规避禁飞区,确保合 规飞行。
实时通信与监控
详细描述
为了获取高精度地图数据,可以采用多种技术手段,如激光雷达、摄像头、GPS等。同时,应该建立完善的高精 度地图数据更新机制,以确保地图数据的实时性和准确性。此外,应该加强高精度地图数据的共享和交换,促进 数据资源的整合和利用。
多传感器融合与协同定位
总结词
多传感器融合和协同定位是PBN的关键技术之一,可以提高导航系统的定位精度和可靠 性。
实时空域管理
通过人工智能技术,对空域进行 实时监控和管理,优化航路安排, 提高空域使用效率。
5G通信技术在导航系统中的应用
1 2 3
高带宽数据传输
利用5G通信技术的高带宽特性,实现导航数据 的快速传输,提高导航系统的实时性和准确性。
低延迟通信
5G通信技术的低延迟特性,使得导航系统能够 实时获取飞行数据和气象信息,为飞行员提供更 准确的导航服务。
基于性能导航(PBN)浅析
基于性能导航(PBN)浅析作者:王伟拴来源:《硅谷》2013年第02期摘要:基于性能的导航(PBN)是近年来国际民航界发展的一项航行新技术,是国际民航组织(ICAO)在整合各国区域导航(RNAV)和所需性能导航(RNP)运行实践和技术标准的基础上,推出的一种新型运行概念,涵盖了从起飞和进近着陆、航路到终端区的所有飞行阶段。
作为我国建设新一代航空运输系统的核心技术之一,基于性能导航的实施是实现我国民航强国战略计划中的重要组成部分,它的应用和推广将对我国民航的机载设备、机场建设、飞行运行、导航设施布局和空域使用产生重大影响,对有效促进民航持续安全、提高飞行品质、减少地面设施投入、增加空域容量和节能减排等具有积极作用。
传统的航路是基于地面导航设施逐个连接各导航点而成的,确保航空器能够依靠导航台的无线电信号向台或背台飞行。
随着航空运输的持续发展,传统航路的局限性日渐严重。
航空电子技术的不断发展使航空器机载设备不断更新,导航精度也不断提高,这就促使了新一代导航技术的产生。
这种导航技术不依赖于地基导航设备,可以使航空器在任意两点之间精确飞行,这就是区域导航的概念。
应用区域导航技术,能够提高空域容量,提高空域运行效率,减少飞行延误,减轻管制员和飞行员工作负荷。
早期的区域导航系统采用与传统的地基航路和程序相似的方式,通过分析和飞行测试确定所需的区域导航系统及性能。
对于陆地区域导航运行,最初的系统采用V0R和DME来进行定位。
在不断的实践中,这样的新技术已逐步通过了开发、评估和认证。
基于此,国际民航组织在附件1l《空中交服务》和《航空器运行手册》(D0C 8168)中提出了区域导航设计的概念。
区域导航(RNAV)是一种导航方式,它可以使航空器在导航信号覆盖范围之内,或在机载自备导航设备的工作范围内,或二者的组合,沿任意期望的航迹飞行,即RNAV系统能够使用多种导航源信号来自动确定航空器位置,建立期望的飞行航迹并为航空器向下一航路点飞行提供航迹引导。
全向信标/测距仪台建设要点

全向信标/测距仪台建设要点根据民航导航发展趋势,全相信标/测距仪导航台在航路上将作为PBN程序的陆基设施[1],同时作为进离场程序的一环,在将来一段时间内全向信标/测距仪导航台仍然是重要的导航设施。
全向信标/测距仪导航台的基本构成都较为类似,但由于设置地点、当地环境的差异,又体现出设计的多样化。
在参与导航台建设的过程中,提炼其中通用的部分,归纳全向信标/测距仪导航台在设计、施工过程中需考虑的要素,从新建导航台、旧导航台更新改造两种情况分析建设过程中一些关键的节点和注意事项。
标签:无线电导航;导航台;设计;施工国内民航业正处于加速发展阶段,随着技术的革新,航空器导航方式随之增加。
在目前的航空技术背景下,无线电导航是一种具有高可靠性和高精度的导航方式。
多普勒甚高频全向信标(DVOR)是一种得到国际公认的高精度近程相位测角导航系统,通过与机载接收机和测距仪(DME)的配合,测定航空器的磁方位角和航空器与导航台之间的距离。
全向信标/测距仪台一般分为在航路(线)上为航空器提供飞行引导信息的航路导航台和在进近区域为飞行的航空器提供引导信息的近场导航台。
随着航线的拓展、机场的新建和改扩建,对导航台的需求随之增长。
导航台的建设具有一定的同一性,有对其进行建设方案标准化的价值。
本文将从新建全向信标/测距仪导航台和全向信标/测距仪导航台原址更新两个角度阐述具有一般性的建设过程和建设要点,并着重挑选部分重要节点和注意事项展开讨论。
一、建设过程简介新建/更新全向信标/测距仪导航台,主要包括前期(需求、选址、规划)阶段、设计阶段、施工阶段和验收阶段。
前期阶段包括可研报告编制、台站选址及征地、初步设计及概算编制、台址频率申报及批复、设备招标采购等,其中更新全向信标/测距仪导航台的选址分为原址更新和异址更新;设计阶段包括飞行程序设计、施工图设计等;施工阶段包括确定施工单位、土建工程施工、导航设备配套设施施工和导航设备安装等;验收阶段包括飞行校验、初步验收、竣工验收、行业验收及地方专项验收等。
基于性能的导航(PBN)技术本质和前景探究
基于性能的导航(PBN)技术本质和前景探究作者:朱婷来源:《中国科技博览》2017年第16期[摘要]基于性能的导航是一种较为新颖的导航技术,可以实现对航空器全部飞行阶段的引导,具有精确性、安全性的特点,能够为民航运输的安全、高效、经济运行奠定良好的基础和前提。
本文从PBN的概念出发,对其本质进行了分析,并就其发展前景进行了研究和讨论,希望能够为PBN技术的应用提供一些参考。
[关键词]PBN技术;技术本质;发展前景中图分类号:V249.3 文献标识码:A 文章编号:1009-914X(2017)16-0350-01前言:伴随着民用航空事业的发展,航班的数量持续增加,使得空中交通流量趋于饱和,不仅导致了航班的延误,而且对航空器的飞行安全造成了一定的威胁。
为了提升空域的利用效率,需要做好空管工作,引入先进的航行技术,PBN技术正是在这样的背景下产生并发展起来的。
1 PBN技术的本质PBN即Performance Based Navigation,基于性能的导航,是指在现有的导航设施的前提下,航空器在指定的空域内,或者沿着相应航路飞行时,对于系统可靠性、精确性、安全性和连续性等方面的要求。
PBN是国际民航组织在对各国区域导航(RNAV)以及所需性能导航(RNP)的技术标准和实践经验进行从分整合的基础上,提出的一种新的运行概念,是世界民航CNS/ATM系统的重要组成部分[1]。
PBN技术的出现,标志着基于传感器导航的航行方式转变成了基于性能的导航,通过卫星导航技术与机载导航设备的相互配合,能够实现对于航空器整个飞行阶段的引导,保证了航空器飞行的安全性,也实现了空中交通管制的有序性和高效性。
从内涵方面分析,PBN导航具备三个基本的要素,分别是性能规范、导航设备以及航行应用,其中,性能规范针对导航性能提出了相对统一的标准,可以为航空器的运行管理提供必要的参照。
相比较传统的基于导航传感器导航方式相比,基于性能的导航PBN具有几个较为显著的特点,一是不需要在导航系统改进后,对特定传感器的运行要求进行更改,有效减低了设备的更新维护成本;二是对RNAV系统的使用方式进行了明确;三是可以更加方便、更加有效的对空域资源进行利用,提升航班的运行效率;四是能够减少对于特定传感器航路以及相关程序的维护,降低成本;五是可以提供有限的导航规范,其能够在全球范围内得到有效应用,对运行审批程序进行简化[2]。
北斗卫星导航系统应用于性能导航(PBN)的分析
北斗卫星导航系统应用于性能导航(PBN)的分析
管磊
【期刊名称】《军民两用技术与产品》
【年(卷),期】2016(000)014
【摘要】PBN是国际民航于2007年提出的一种新的运行概念,基于日渐成熟的导航技术,让飞行方式与空中交通变得更加安全和高效.伴随着我国北斗卫星导航系统的发展与使用,将进一步推动PBN的实现.本文主要讲述详细阐述北斗卫星导航系统的作用与效果,进而加深人们了解其对PBN的意义.
【总页数】1页(P10)
【作者】管磊
【作者单位】民航内蒙古空管分局,呼和浩特 010070
【正文语种】中文
【相关文献】
1.北斗卫星导航系统应用于性能导航(PBN)的分析 [J], 黄晋;刘强
2.基于北斗卫星导航系统的差分定位技术性能分析 [J], 庄皓玥;原彬;张睿
3.关于北斗卫星导航系统应用于藏区维稳处突应急投送力量建设中的可行性分析[J], 黎珂佚;
4.北斗卫星导航系统全球定位性能分析 [J], 刘亚明;辛明真;吴永亭;刘会;王晓明;阳凡林
5.北斗卫星导航系统功率增强选星策略设计与性能分析 [J], 郝雨时;孙剑伟;马冬青因版权原因,仅展示原文概要,查看原文内容请购买。
PBN特点分析及应用综述

PBN特点分析及应用综述摘要PBN 本身所具有的点到点之间的精确度较高的特点,利用关键点来限制速度与高度,告别了传统地基导航台的约束,极大缩短了航行的时间,降低了航线的运行成本,缩短了飞行时间。
此外,PBN还能解决复杂的地形的飞行问题,提高环保水平。
随着人们生活水平的提高,对于环境问题也愈加重视,PBN能充分发挥了航空器精确导航的作用,选择合理的飞行路线,缩短燃油消耗,减少噪音对居民的影响。
本文综合论述了PBN技术特点,并展望了未来发展前景。
关键词:PBN、运行特点、技术优势、优化路径一、背景2009 年,中国民用航空局发布《基于性能的导航(PBN)实施路线图》,明确指出将推广使用具有 Baro-VNAV 的 RNP APCH进近程序,力争 2016 年实现全部机场仪表跑道具有所需导航系统(RNP)的进近能力。
利用机载增强系统(ABAS)与气压高度计先实现具有 Baro-VNAV 功能的具有垂直引导进近(APV),未来实现 APV 取代非精密进近(NPA),还将考虑使用“北斗”导航系统提供导航服务。
同时,在 APV 逐渐代替 NPA 过程中,随着完好性监测水平的不断进步,机载设备对水平完好性、垂直方向完好性的满足程度不断提高[1], PBN 应用中APV/LPV 进近过程的完好性需求会进一步得到满足。
因而,随着 GNSS、机载系统、PBN规范等综合性、功能性、系统性的不断完善,未来民航会采用多星座组合方式引导航空器飞行,PBN的应用势必会因起定位应用的便捷性、可靠性为民航运行提供更强的技术支持。
二、 PBN 运行特点与传统的导航方式相比,PBN 导航在空域运行具有其自己的特点和优势,主要表现在运行的安全性、空域的容量、运行效率、运行成本等方面。
(1)空域安全性PBN 飞行程序与传统程序相比,具有很高的导航精度,能够精确地引导航空器,提高飞行运行安全性。
在终端区,可以同时提供水平引导和垂直引导,使得连续稳定的下降程序得以实施,从而减少可控飞行撞地的风险。
导航系统基于性能的导航PBN汇总课件
Avionics Manufacturer/ Data Packer
Paper
EAIP
AIP
EAD
Data House
ARINC 424
2024年3月7日
导航系统
15
区域导航—基于性能的导航(PBN) 数据质量
安全的RNAV 应用依赖于导航数据 输入问题=输出问题 需要最开始的数据是精确的并有足够的精度 需要确保数据在整个数据链中的完好性
2024年3月7日
导航系统
13
区域导航—基于性能的导航(PBN) PBN
2024年3月7日
导航系统
14
区域导航—基于性能的导航(PBN) 数据格式
Surveyor/ Designer
Heinz 57 Varieties
Civil Aviation Authority
Airborne RNAV System
2024年3月7日
导航系统
9
区域导航—基于性能的导航(PBN) 导航规范
2024年3月7日
导航系统
10
区域导航—基于性能的导航(PBN) 导航规范(RNP机载监视与告警)
2024年3月7日
导航系统
11
区域导航—基于性能的导航(PBN) 导航应用
2024年3月7日
导航系统
12
区域导航—基于性能的导航(PBN) 导航设施
2024年3月7日
导航系统
16
区域导航—基于性能的导航(PBN) 导航数据库的相关者
2024年3月7日
导航系统
17
区域导航—基于性能的导航(PBN) PBN的实施—确定需求
2024年3月7日
浅谈基于性能导航(PBN)
浅谈基于性能导航(PBN)发表时间:2017-11-01T09:10:02.923Z 来源:《科技中国》2017年7期作者:汪超[导读] 摘要:基于性能导航(PBN)的应用和推广将对我国民航的飞行运行、机载设备、机场建设、导航设施布局和空域使用产生重大影响,对有效促进民航持续安全、提高飞行品质、增加空域容量、减少地面设施投入和节能减排等具有积极作用。
关键词基于性能导航(PBN);发展现状;内容引言近年来,基于性能的导航(PBN),一项新兴技术正在国际民航中广泛推广应用,该技术将先进的民用航空器性能与先进的导航技术,尤其是卫星导航技术结合,使得现行飞行导航更加精确、安全、高效。
分析与研究PBN导航系统的性能及特征,能够为PBN运行和民航的生产运输提供技术上的支持和帮助。
1 PBN飞行程序国内研究现状目前,全世界各国都在依据本国民航现状和技术基础为出发点,开始了组织实施PBN进程的工作,也取得了不同的成果,部分地区的进展可以为中国的PBN实践提供参考和经验。
民航发展迅猛,在新技术方面的应用,普遍认可就是PBN这项新技术的应用。
在我国民航迅猛发展的这些年间,空域改革己被列入“十二五”规划。
空域紧张和流量控制是发展中暴露出的问题,需要通过发展来解决。
PBN这项技术在结合中国的空域状况非常重要,民用航空运输可用的空域资源比较少,这些技术可以帮助我们实现更高精度的导航,使在更狭小的空域范围内实现安全运行和运行有效。
2010年以来,航空公司接到空管部门的流量控制指令越来越频繁。
由流量控制导致的航班延误,己经超过天气因素,成为最主要的延误成因。
一位航空公司的高层表示,该公司今年以来的航班延误中,约有三分之一到一半是由流量控制引起的。
长期以来,全国空域划设成多个管制区,由军方管理,民航只负责管理31条航路及北京首都国际机场的“终端区”和其它机场的“进近区”。
目前,民航可以使用的空域容量仅占全部空域的20%,且近年来几乎没有增加,面对迅猛增长的航线航班数量,民用空域己经严重短缺。
PBN期末复习
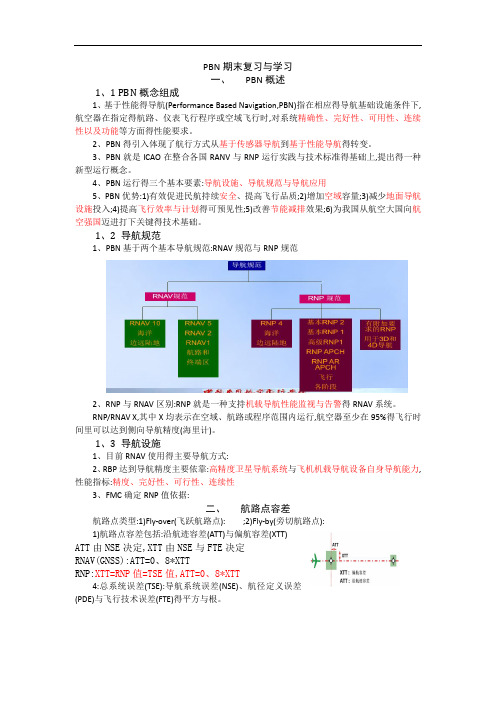
PBN期末复习与学习一、PBN概述1、1 PBN概念组成1、基于性能得导航(Performance Based Navigation,PBN)指在相应得导航基础设施条件下,航空器在指定得航路、仪表飞行程序或空域飞行时,对系统精确性、完好性、可用性、连续性以及功能等方面得性能要求。
2、PBN得引入体现了航行方式从基于传感器导航到基于性能导航得转变。
3、PBN就是ICAO在整合各国RANV与RNP运行实践与技术标准得基础上,提出得一种新型运行概念。
4、PBN运行得三个基本要素:导航设施、导航规范与导航应用5、PBN优势:1)有效促进民航持续安全、提高飞行品质;2)增加空域容量;3)减少地面导航设施投入;4)提高飞行效率与计划得可预见性;5)改善节能减排效果;6)为我国从航空大国向航空强国迈进打下关键得技术基础。
1、2 导航规范1、PBN基于两个基本导航规范:RNAV规范与RNP规范2、RNP与RNAV区别:RNP就是一种支持机载导航性能监视与告警得RNAV系统。
RNP/RNAV X,其中X均表示在空域、航路或程序范围内运行,航空器至少在95%得飞行时间里可以达到侧向导航精度(海里计)。
1、3 导航设施1、目前RNAV使用得主要导航方式:2、RBP达到导航精度主要依靠:高精度卫星导航系统与飞机机载导航设备自身导航能力,性能指标:精度、完好性、可行性、连续性3、FMC确定RNP值依据:二、航路点容差航路点类型:1)Fly-over(飞跃航路点): ;2)Fly-by(旁切航路点):1)航路点容差包括:沿航迹容差(ATT)与偏航容差(XTT)ATT由NSE决定,XTT由NSE与FTE决定RNAV(GNSS):ATT=0、8*XTTRNP:XTT=RNP值=TSE值,ATT=0、8*XTT4:总系统误差(TSE):导航系统误差(NSE)、航径定义误差(PDE)与飞行技术误差(FTE)得平方与根。
三、PBN程序设计概述3、1 确定最短稳定距离目得:防止设置得转弯航路点间距离过进,造成RNAV系统可能错过航路点,从而须考虑连续两个转弯航路点间得最小距离。
PBN的详细介绍及其飞行程序设计
VNAV系统。运行人员必须依据气压式高度表,确保满足程序
中公布的所有高度限制。
(4)所有的航线和程序都必须以世界地理系统(WGS-84)坐标为
基础;
(5)对于所公布的有关航线、程序和导航设备的导航数据,必须满足
ICAO附件15(航行情报服务)的要求。
Waypoint
Final Approach
Waypoint
Turning Point
(if required)
5 nm
Missed
Approach
Point
Initial Approach Waypoint
第18页,共49页。
Missed Approach
Holding Point
“T”型程序
第19页,共49页。
批准指南》:1、目的;2、适用范围;
3、撤消;4、定义;5、参考资料;6、
背景;7、机载设备要求;8、运行程序 ;
9、训练要求 ;10、运行批准;附录一 气
压垂直导航;附录二 高级特征.
第42页,共49页。
飞行员知识/训练
训练内容应提供充分的有关航空器RNP系统的训练(如基于计算机的训练、模拟仿真、训练装
DME/DME、GNSS(全球卫星导航系统)、
INS/IRS(惯性导航系统)、FMS(飞行管理系统)综合
第3页,共49页。
区域导航的实施:飞行管理系统FMS
第4页,共49页。
所需导航性能(RNP)的概念
• 所需导航性能(RNP,REQUIRED
NAVIGATION PERFORMANCE):对在规
第44页,共49页。
PBN概述

7
PBN优点
4、减少飞行时间、节约油量
8
PBN优点
5、降低飞机对地面的噪音影响
9
PBN优点
6、增加空域容量
10
PBN优点
6、增加空域容量
11
12
PBN优点
传统程序双跑道运行
Existing Approach Path Separation Using ILS
(Without PRM)
Full Scale Deflection (95 % probability)
31
RNP1/2
使用GPS
利于GPS的RAIM功能来保障完好性
用于航路和终端区
32
进近的导航应用
进近不使用RNAV导航规范,只能采用RNP导
航规范。
基于GNSS。 RNP APCH=当前的RNAV(GNSS) RNP AR=RNP SAAAR
33
RNP APCH
用于进近程序 起始进近、中间进近、复飞精度1.0 最后进近精度0.3 完全依靠GPS
8、减少陆空通话次数,降低管制员工作负荷
TRACON Departure Controller Check-in to Handoff
使用区域导航后
“Delta 858 Atlanta departure radar contact” “Delta 858 climb maintain one four thousand” “Delta 858 contact Atlanta Center at 124 .5 good day”
2
PBN与传统导航
传统导航 RNAV
PBN
RNP
3
PBN优点
1、不依赖陆基导航设备
基于性能的导航(PBN)程序运行优势的思考
基于性能的导航(PBN)程序运行优势的思考发表时间:2019-09-10T14:17:53.280Z 来源:《科技新时代》2019年7期作者:赖炬恩[导读]杭州萧山国际机场有限公司随着区域导航(简称RNAV)技术的逐渐推广使用和航空器机载设备能力的提高以及卫星导航等先进技术的不断发展,近年来,国际民航组织(ICAO)提出了,“基于性能的导航(PBN) ”概念。
此项技术的实施必将使航空业在保证飞行安全、扩大系统容量、提高运行效率、实现机场和空域使用效率最大化等方面将明显提升。
作为我国建设新一代航空运输系统的核心技术之一,PBN的实施也是实现我国民航强国战略计划中的重要组成部分。
本文通过收集和学习国内外PBN相关资料,分析了PBN的概念以及组成特点,同时以厦门机场为例,通过实际成效证明了PBN程序相较于传统程序的诸多优势。
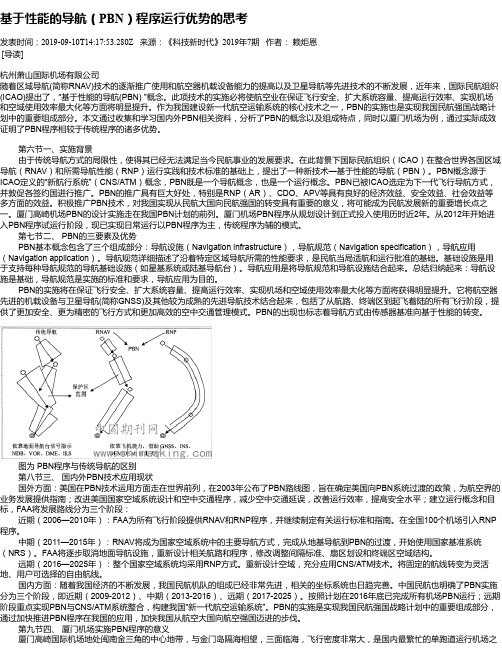
第六节一、实施背景由于传统导航方式的局限性,使得其已经无法满足当今民航事业的发展要求。
在此背景下国际民航组织(ICAO)在整合世界各国区域导航(RNAV)和所需导航性能(RNP)运行实践和技术标准的基础上,提出了一种新技术—基于性能的导航(PBN)。
PBN概念源于ICAO定义的“新航行系统”(CNS/ATM)概念,PBN既是一个导航概念,也是一个运行概念。
PBN已被ICAO选定为下一代飞行导航方式,并敦促各签约国进行推广。
PBN的推广具有巨大好处,特别是RNP(AR)、CDO、APV等具有良好的经济效益、安全效益、社会效益等多方面的效益。
积极推广PBN技术,对我国实现从民航大国向民航强国的转变具有重要的意义,将可能成为民航发展新的重要增长点之一。
厦门高崎机场PBN的设计实施走在我国PBN计划的前列。
厦门机场PBN程序从规划设计到正式投入使用历时近2年。
从2012年开始进入PBN程序试运行阶段,现已实现日常运行以PBN程序为主,传统程序为辅的模式。
第七节二、 PBN的三要素及优势PBN基本概念包含了三个组成部分:导航设施(Navigation infrastructure),导航规范(Navigation specification),导航应用(Navigation application)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
表 4 R N P 导航性能精度分析
性能精度要求 GPS可提供的定位精度
4NM
0.1km
1NM
0.1km
0.3NM
0.1km
0.1NM
0.1km
结论 满足运行要求 满足运行要求 满足运行要求 满足运行要求
4. 环境 避开噪音敏感区域,比如 RNP (AR) APCH 能提供带有转弯 的复飞程序,避开噪音敏感地区。 5. 可进入性 改进机场或空域在恶劣天气下 的可进入性,或者高原复杂机场(如 林 芝) 的 可 进 入 性 。 比 如 RNP APCH 能实现更低的落地标准。如 延安。 6. 经济性 节约用于维护基于导航台的航 路和程序的费用。比如,移动或者 增加一个导航台,就要修改所有与 此导航台相关的航路和程序。 每当导航设施有新的技术进 展,就要发展新的运行方式,但 是,在 PBN 中,系统的性能要求 不再是是否安装了某种设备,而是 设备或设备的组合能否满足特定 PBN 运行的系统性能要求。所以, 每当导航设施有新的技术发展,只 需要看它是否满足现在 PBN 系统 性能要求即可,不需要为它设定特 定的运行方式。 四、PBN实施计划 目前,美国许多机场都提供基 于 GPS 的 RNAV 飞行程序,例如 华盛顿杜勒斯机场、亚特兰大哈兹 菲尔德-杰克逊机场,FAA 出台了
源容差、机载接收机容差、显示器 容差和飞行技术容差。以 RNAV1 为例,其标称值即为 1NM;
(2) 完整性要求,在适航条例 中,航空器导航设备故障被归类为 严重故障 (即,每小时 10-5);
(3) 持续性,如果航空器操作 者可以转换到不同的导航系统,并 且继续飞行至某一合适的机场,失 去功能就被归类为较小故障;
以 RNAV1、 BASIC -RNP1 为 例,RNAV1、BASIC-RNP1 要求的 偏航容差及沿航迹容差均为 1NM 即 1852 米,GPS 的定位精度绝对 能够满足此项要求,即便是对性能 精度要求更加严格的 RNP APCH、 RNP AR APCH, GPS 也依然符合 要求,具体内容详见表 3、表 4。
9
专业探索 专稿 /S P E C IA L A R TIC LE
前 实 施 基 于 DME/DME 的 PBN 技 术存在的一个主要问题。
3. 基 于 DME/DME/IRU 的 PBN 导航应用有效区域
事实上,基于 DME/DME/IRU 的 PBN 导航应用有效区域与基于 DME/DME 的 PBN 导航应用有效区 域推算方法是一致的,区别在于配 备 IRU 的 航 空 器 一 旦 进 入 DME/ DME 导航应用非更新区时,可以 利 用 机 载 IRU 实 现 定 位 , 此 时 , 认为 IRU 位置误差增长率小于每 15 分钟两海里。不过,目前对于 允许使用机载 IRU 实现定位的导 航应用非更新区的具体范围,暂无 相应确定方案。
区域导航是一种导航方式,它 可以使航空器在导航信号覆盖范围 之内,或在机载导航设施的能力限 制之内,或二者的组合,沿任意期 望的航径飞行。
所需性能导航是在区域导航上 基础上衍生的,它还要求航空器必 须具备机载导航性能监测及告警功 能。
依据导航规范中所需性能精度 水平的差异,区域导航分为 RNAV10、 RNAV5、RNAV2、RNAV1,所需性能 导航分为 RNP4、Basic—RNP1、RNP APCH、RNP AR APCH,具体内容 详见表 1、表 2。
(4) 空间信号可达性,如果使 用全球卫星导航系统,在空间信号 导致侧向定位误差大于 20 海里的 可能性超过每小时 10-7。
2. 为达到所需性能,区域导 航系统需要具备的功能。
3. 融入区域导航系统,可以 用来达到所需性能的导航传感器。
4.飞行机组人员及为达到区域 导航系统所需性能的其他规定。
要求机载性能监测和告警的导 航规范被称之为所需性能导航 (RNP) 规范。不要求机载性能监 测和告警的规范被称之为去与区域 导航 (RNAV) 规范。用机载性能 监测和告警区别所需导航性能和区 域导航较为方便,简化了两种规范 对于航空器系统运行要求的少数差 异性和诸多共同性功能的表述。
专业探索 专稿 /S P E C IA L A R TIC LE
基于性能导航(PBN)技术介绍
Introduction to Performance Based Navigation (PBN) technologies
华东空管局 蔡清毅
引言 随着经济的发展,我国民用航 空业已进入高速发展时期,空中交 通流量的持续增长,导致进离场航 空器冲突、空域拥挤、飞行延误情 况日益严重,这极大地增加了管制 员的工作负荷。 汲取美国、欧洲等民用航空发 达国家采用区域导航技术,成功实 现进离场航路、航线分离,飞行剖 面优化的经验,我国也在逐步推行 区域导航技术,并计划在北京、上 海、广州等 10 个机场的终端区实 施区域导航。 传统导航方式要求航空器飞越 或切入导航设备,区域导航则是可 以在导航信号覆盖范围之内,或在 机载导航设施的能力限制之内,或 二者的组合,沿任意期望的航径飞 行,这就使飞行程序设计不再受制 于导航台的位置,可以更加科学、 灵活地利用空域。 针对区域导航(RNAV)与所需 性能导航(RNP), 各国、各地区制 定了各自的审定标准及批准流程, 这就使得航空器在执行跨国、跨地 区飞行时,需要重复审定其区域导 航或所需性能导航资格,这带来了 诸多不便。有鉴于此,ICAO 于 2006 年颁布了一套全球统一的运行规 范,即 PBN 手册,正式提出 PBN(基
需要雷达
表 2 R N P 导航应用介绍
导航应 用方式 RNP4
Basic-RNP1
RNP APCH RNP AR APCH
可用导航 设施 GNSS
GNSS、DME/DME
GNSS GNSS、DME/DME
性能精度 要求
适用飞行 阶段
监视
4NM
洋区及边远地区 不需要雷达
1NM
进场、起始进近、中间 进近、复飞、离场
传统导航方式要求航空器飞越 或切入导航设备,PBN 则是可以在 导航信号覆盖范围之内,或在机载 导航设施的能力限制之内,或二者 的组合,沿任意期望的航径飞行, 这就使飞行程序设计不再受制于导 航台的位置,可以更加科学、灵活 地利用空域。
PBN 虽然使航空器可以沿任意 期望的航径飞行,但前提是在导航 信号覆盖范围之内,或在机载导航 设施的能力限制之内,或二者的组 合,所以,要设计基于 PBN 的飞 行程序,首先必须确定所实施导航 应用的信号覆盖范围。
不需要雷达
0.3NM
进近、复飞
不需要雷达
0.1NM
进近、复飞
不需要雷达
种模式,不同的导航应用方式可使 用的导航设施是不同的,具体内容 见表 1、表 2。
二、国内外研究现状 (一) 国外研究现状 针对基于 PBN 的飞行程序设 计,国外相关专家、学者进行了大量 的工作,取得了丰硕的研究成果,如 美国、欧洲均颁布了实施 PBN 的民 用航空器适航审定标准。然而,现阶 段,针对基于 PBN 的飞行程序设计 的关键,即导航应用有效区域的确 定,仍存在一些盲点。 PBN 虽然使航空器可以沿任意 期望的航径飞行,但前提是在导航 信号覆盖范围之内,或在机载导航 设备的能力限制之内,或二者的组 合,所以,要设计基于 PBN 的飞 行程序,首先必须确定所实施导航 应用的信号覆盖范围。 目前,国外针对导航应用有效 区域研究情况如下: 1. 基于 GNSS 的 PBN 导航应 用有效区域 目前国外设计的基于 PBN 的 飞行程序,使用的导航设施基本上
于性能的导航)这一概念。 基于 PBN 的飞行程序是飞行
程序的发展方向,是解决进离场航 空器冲突、空域拥挤、飞行延误, 减轻管制员工作负荷的有效途径。 ICAO、 欧 洲 航 行 安 全 组 织 均 制 定 了相应的 PBN 实施计划。我国的 相关研究起步较晚,但是,中国民 航局空中交通管理局也制定了我国 的 PBN 发展战略,明确指出我国 民航未来的飞行程序和航路飞行将 以 PBN 为方向,逐步取代现有的 传统飞行程序和 ATS 航路。
(二) 我国研究现状 我国基于 PBN 的飞行程序设 计相关研究工作起步较晚,目前, 主要是借鉴美国、欧洲等民用航空 发达国家、地区实施 PBN 的相关 技术和经验,如东航设计完成的丽 江机场 RNP AR APCH 进离场程 序即是使用 GPS 作为导航定位信 号来源,航空器的适航审定工作也 是依据美国联邦航空局的 SAAAR (要求授权的特殊航空器和机组实 施所需性能导航) 完成。 三、实施PBN的收益 1. 安全 提供侧向和纵向航迹引导,减少 近地过程中的危险近地飞行。比如用 RNP 进近代替传统的盘旋进近。 2. 容量 增加航路数目,减少空中交通 拥挤,满足空中交通的增长需要。 在城市间设计平行的 RNAV2 编组 航路 (如北京-上海)。 3. 效率 减少由于过多的阶梯上升或者 阶梯下降导致的延误。比如 RNAV-1 允 许 连 续 爬 升 到 航 路 高 度,而不是阶梯爬升。
导航应用类型 RNAV10 RNAV5 RNAV2 RNAV1
表 3 R N A V 导航性能精度分析
性能精度要求 10NM 5NM 2NM 1NM
GPS可提供的定位精度 0.1km 0.1km 0.1km 0.1km
结论 满足运行要求 满足运行要求 满足运行要求 满足运行要求
导航应用类型 RNP4
(二) 导航应用 导航应用是指按照空域概念,
8
《空中交通管理》2011 年 第 4 期
专稿 /S P E C IA L A R T IC LE
对导航规范和相关空中交通服务航 路 导 航 设 施 、 仪 表 进 近 程 序 和/或 指定空域的使用。
PBN 导 航 应 用 包 括 区 域 导 航 (RNAV)和所需性能导航 (RNP), RNAV 导航应用由 RNAV 导航规范 来支持,RNP 导航应用由 RNP 导 航规范来支持。