无线远程控制自动小车设计
无线远程控制自动小车设计

在 电 源模 块 中 ,上 位 单 片机 与 计 算机 进 行 串 口通 信 ,采 用 USB供 电 ,下 位单 片机 系统 采 用双 电 源供 电。 将 电 动机 驱 动 电源 与 单 片 机 以 及其 周
要 注 意 的 是 ,由于 电机 驱 动 输 出电 流较 大 ,容 易 拉 低单 片机 10 口 的电压 ,当 电压 过 低 时可 能造 成 单 片机 工 作 不 稳 定 ,或 者 使 单 片 机 复 位 ,为 了避 免 这种情 况 ,单 片机 使 用一个 稳压 电源 。
传输 距 离远等 优点 ’ 。
在 上 位 单 片 机 与
计 算 机 的 通 讯 中 ,采
用 MAXIM 公 司 生 产
的 MAX232 电 平 转 换
芯 片 来 实 现 RS一232标
准 接 口通信 。
在 电 机 驱 动 模 块
中 , 采 用 自带 减 速 器
的 直 流 电 机 作 为 驱 动
收稿 日期:2011-09—21 作者简介:袁冬梅 (1973一),女 ,讲师 ,硕士 ,研究方 向为汽车试验 台控制技 术研 究。
第34卷 第4期 2012~4(下 ) [1071
务I生 訇 ,tb
功 能 , 具 有 工 作 稳 定
可 靠 ,外 围 电 路 简 单 ,
功 耗 低 ,传 输 速 度 快 ,
11081 第34卷 第4期 2012~4(下 )
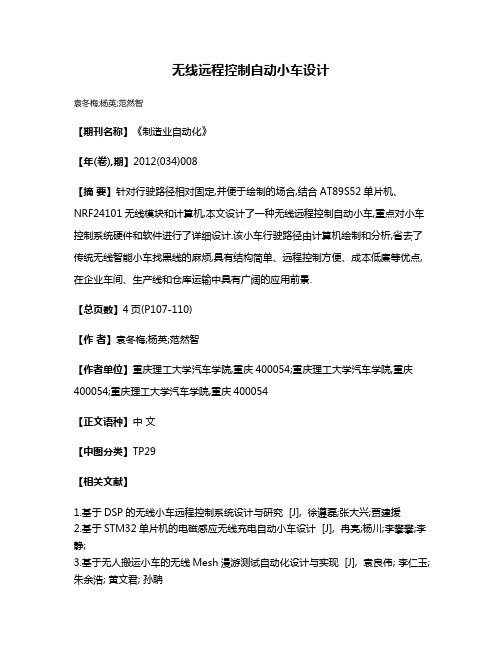
图2 上位 单 片 机 系统 电路 原 理 图
务l造 匐 化
3 控 制系统 软件设计
3.1 上 位 单片机 软 件设计 上位 单 片 机 主 要 的 功 能 包 括 接 收 计 算 机 发 来
的数 据 并通 过 无 线模 块 把数 据 发 送给 下 位单 片机 。 计 算 机 发给 上 位 单 片机 的 指令 格 式 是 5个 16进 制 数 ,前 四位 分 别代 表 两 个 电机 的 占 空 比 , 中 间 四 位 分 别 控 制 两 个 电机 的旋 转 方 向 ,后 面 两 位 是标 志位 。上 位单 片机 软件 流程 如 图 4所 示 。
毕业设计wifi小车
毕业设计wifi小车毕业设计:探索无线小车的神奇世界引言:毕业设计是每个大学生的重要任务之一,它既是对所学知识的综合应用,也是对创新能力的考验。
在选择毕业设计题目时,我对未来科技发展充满了浓厚的兴趣。
因此,我决定选择设计一个具有创新性和实用性的项目,于是我选择了毕业设计wifi小车。
1. 背景介绍如今,无线通信技术已经深入到我们的生活中的方方面面。
而wifi技术更是无线通信领域的重要组成部分。
在这个信息爆炸的时代,人们对于无线网络的需求越来越高。
因此,设计一个能够利用wifi技术实现远程控制的小车,将会给人们的生活带来便利。
2. 设计目标我的毕业设计wifi小车的设计目标是能够远程控制,具备高度灵活性和稳定性。
通过wifi技术,用户可以通过手机或电脑远程操控小车的运动,实现对小车的全方位控制。
3. 硬件设计3.1 主控制器作为小车的大脑,主控制器是整个系统的核心。
我选择了一款性能稳定、功能强大的单片机作为主控制器,它能够实现对小车的各种功能的控制和管理。
3.2 传感器为了使小车能够感知周围环境,我在设计中加入了多种传感器。
例如,超声波传感器可以用来检测障碍物,红外线传感器可以用来检测光线强度,温度传感器可以用来测量环境温度等等。
这些传感器的数据可以通过wifi传输到用户设备上,用户可以实时了解小车周围环境的情况。
4. 软件设计4.1 控制端软件为了实现远程控制,我设计了一款控制端软件。
用户可以通过这款软件连接到小车的wifi网络,并通过界面上的按钮来控制小车的运动。
同时,软件还可以显示小车传感器的数据,使用户能够实时了解小车周围环境的情况。
4.2 小车端软件为了实现与控制端的通信,我设计了一款小车端软件。
该软件负责接收控制端发送的指令,并将指令转化为相应的动作。
同时,小车端软件还负责将传感器数据发送到控制端,以便用户实时监测。
5. 实验结果经过反复的测试和优化,我的毕业设计wifi小车取得了令人满意的实验结果。
基于无线控制的智能小车系统的设计毕业设计
基于无线控制的智能小车系统的设计摘要:本文针对基于无线控制的智能小车的设计和研究,首先对系统的总体设计加以介绍,概括了智能小车的主要作用及其工作模式,并介绍了智能小车的主要元器件;然后详细介绍了系统的硬件以及软件设计,硬件方面,重点研究了温度采集模块、红外避障模块和无线收发模块,软件方面详细讲解了上位机人机交互界面的设计、避障设计以及无线通信的数据处理;最后,总结了系统测试结果并对本设计的发展前景做了概述。
关键词:单片机;上位机;红外线;避障;温度检测;无线通信The intelligent car Based on wireless controlAbstract: In this paper, the overall description of the smart car, which is base on the wireless control, is introduced its design and research. First introduced is the overall design of the system, and describes the major function, operating mode and the main components of the smart car; then analyses the system's hardware and software design in detail. Hardware side, the focus is on the temperature acquisition module, infrared obstacle avoidance module and wireless transceiver module; The software has a detailed account of the host-computer interactive interface design, the design of the obstacle avoidance and wireless communication's data processing; Finally summaries up the test results of this system and has an overview of the prospects for the development of this design.Keywords: MCU; upper computer; Infrared ray; Obstacle avoidance; Temperature detection; Wireless communication1.绪论1.1课题的背景及意义1.1.1课题背景未来是充满科学技术的新时代,而智能化[1]正是科学技术的重要体现。
遥控小车毕业设计

遥控小车毕业设计遥控小车毕业设计随着科技的不断进步,遥控小车成为了人们生活中常见的一种智能设备。
它不仅可以提供娱乐,还可以应用于各种领域,如工业、医疗等。
本文将探讨一种遥控小车的毕业设计方案。
一、设计目标在开始设计之前,我们首先需要明确设计的目标。
本设计旨在开发一款功能强大、操作简便的遥控小车,以满足用户对于远程控制的需求。
该小车应具备较高的机动性和稳定性,能够适应各种地形和环境。
二、硬件设计1. 控制模块遥控小车的核心是控制模块。
我们可以选择使用Arduino等单片机作为控制模块,通过编程实现对小车的控制。
此外,还需要配备无线通信模块,以实现与遥控器之间的数据传输。
2. 电源系统为了保证小车的正常运行,我们需要设计一个稳定可靠的电源系统。
可以选择使用锂电池作为小车的电源,通过充电器进行充电。
此外,还需要考虑电源管理模块,以避免电池过放或过充的情况。
3. 传感器为了增加小车的智能化程度,我们可以添加一些传感器,如红外线传感器、超声波传感器等。
这些传感器可以用于检测障碍物、测量距离等功能,从而实现小车的自主避障和定位。
4. 机械结构小车的机械结构应该具备足够的稳定性和灵活性。
我们可以选择使用金属或塑料材料制作车身,同时考虑到小车的重量和外形设计。
此外,还需要设计合适的轮子和悬挂系统,以提供良好的行驶性能。
三、软件设计1. 远程控制程序为了实现对小车的远程控制,我们需要编写一套远程控制程序。
可以选择使用C/C++等编程语言,通过串口或无线通信模块与小车进行数据交互。
在程序中,可以定义各种指令,如前进、后退、转向等,以实现对小车的精确控制。
2. 自主避障算法为了增加小车的智能化程度,我们可以编写一套自主避障算法。
该算法可以根据传感器的数据判断前方是否有障碍物,并采取相应的措施进行避障。
例如,当传感器检测到障碍物时,小车可以自动停下或改变方向,以避免碰撞。
3. 数据处理与显示为了方便用户对小车的控制和监控,我们可以设计一个数据处理与显示模块。
无线遥控智能小车的设计

无线遥控智能小车的设计摘要面对诸多人类不容易到达的工作环境,为了有效的到达指定位置完成指定功能,就需要采用智能小车去现场来完成相应的任务。
因此研究和开发无线遥控智能小车引导控制系统具有十分重要的意义。
无线遥控小车具有体积小、成本低、生存能力强等特点。
本设计基于单片机控制和无线数据传输技术的设计思想。
利用两片单片机构成主从结构,主机发送控制指令,从机接收控制指令并控制小车运动。
主机由STC89C52单片机、LCD1602显示、NRF24l01无线模块和控制按键组成,从机由小车底盘、NRF24l01无线模块、电机驱动、HC-RS04超声波测距模块和STC89C52单片机组成。
主机和从机基于无线模块进行数据传输,主机电路主要负责发送小车运动状态的控制指令;从机电路主要负责小车运动状态指令的接受和实现对运动状态的控制。
电机由电机专用驱动芯片L298N驱动,通过单片机的控制,可轻松实现小车的前进、后退、左转、右转等的控制。
无线遥控智能小车控制系统的软件设计分为主机和从机两部分。
主机软件设计分为无线通讯程序,按键控制程序,显示程序,从机软件设计分为小车超声波避障程序,无线通讯程序,电机驱动程序。
概括来说,本设计就是用遥控器发射控制信号,用单片机控制直流电机输出相应的电平控制车辆的前行或者后退等动作,进而实现小车的智能遥控功能。
关键词:STC89C52;无线遥控;智能小车AbstractFacing a range of working environment that human beings can not reach easily, it is necessary to employ the intelligent car to go to the scene to accomplish the corresponding task in order to reach the specified location to complete the specified function effectively. Therefore, it is of great importance to study and develop the guidance and control system of the wireless remote controlled intelligent trolley.The wireless remote controlled car is characteristiced by small size, low cost, strong survivability and so on.The design is based on the thinking about the single-chip control and wireless data transmission technique. Using two microcontrollers constitutes the master-slave structure. The host sends control commands, which the slave receives and then controls the trolley movement.The host consists of the STC89C52 microcontroller, LCD1602 display, NRF24l01 wireless module and control buttons while the slave is made up of the car chassis, NRF24l01 wireless module, motor drive, HC-RS04 ultrasonic distance measurement module and STC89C52 microcontroller. The host and slave are based on the wireless communication module for data transmission. The host circuit is mainly responsible for sending movement control instructions to the car; the slave circuit is mainly responsible for the acceptance of the movement state of the car and the realization of the control of the state of motion. The motor is driven by the motor-specific driver chip L298N. Through the control of the single chip computer, the control of car to advance, go backward, turn left and right can be easily realized. The software design of wireless remote control intelligent car control system is divided into two parts of the host and slave. Host software design is divided into wireless communication procedures, button control procedures, display procedures. Slave software design is divided into trolley ultrasonic obstacle avoidance procedures, wireless communication procedures and motor drivers.To sum up, the design is to use the remote control to launch control signals and single-chip to control DC motor to output corresponding level of electricity to control the vehicle going forward or backward and other actions, and then it realizes intelligent remote control function of the car.Keywords: STC89C52; remote control; intelligent car目录摘要 (I)Abstract (II)第1章绪论 (1)1.1课题研究主要内容及要求 (1)1.2课题研究的目的和意义 (1)1.1.1研究的目的 (1)1.1.2研究的意义 (1)1.3课题国内外研究状况 (2)1.4 总结 (2)第2章总体方案设计 (3)2.1总体设计 (3)2.2方案论证 (4)2.2.1 系统控制模块选择 (4)2.2.2小车遥控选择 (5)2.2.3上位机显示模块设计选择 (6)2.2.4下位机电机的选择 (7)2.2.5下位机避障模块设计选择 (8)2.2.6 直流调速方案选择 (9)2.2.7电源模块设计选择 (9)2.3本章小结 (10)第3章系统模块电路 (11)3.1单片机最小系统 (11)3.2 NRF24L01无线通讯模块 (11)3.3电机驱动模块 (13)3.3.1 L298N驱动模块 (13)3.3.2 PWM调速原理 (14)3.4电源模块 (15)3.4.1 5V稳压电路 (15)3.4.2 3.3V稳压部分 (15)3.5 避障部分模块 (16)3.5.1 避障原理 (16)3.5.2超声波测距模块 (16)3.6 其他模块电路介绍 (17)3.6.1 LCD1602显示电路 (17)3.6.2 键盘电路 (18)3.7本章小结 (19)第4章软件设计与说明 (20)4.1软件设计 (20)4.2软件的说明 (21)4.2.1 遥控部分主程序流程 (21)4.2.2 NRF24L01子程序流程图 (22)4.2.3 小车部分主程序流程图 (23)4.2.4 超声波部分程序流程图 (24)4.3 本章小结 (24)第5章硬件与软件调试 (26)5.1 硬件调试部分 (26)5.2 软件调试部分 (26)5.3 系统总体调试 (26)第6章结论 (29)参考文献 (31)附录A:电路原理图 (33)附录B:电路PCB图 (34)附录C:程序清单 (36)第1章绪论1.1课题研究主要内容及要求分析无线遥控智能小车的设计要求,确定上位机和下位机控制系统、智能小车驱动方式和避障方式、车速的检测方法,无线通信方式等,完成系统硬件电路及部分软件的设计。
智能无线控制小车设计
智能无线控制小车设计摘要智能作为现代社会的新产物,是以后的发展方向,他可以按照预先设定的模式在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或是更高的目标。
随着计算机、网络、机械电子、信息、自动化以及人工智能等技术的飞速发展,移动机器人的研究进入了一个崭新的阶段。
目前,智能移动机器人,无人自主车等领域的研究进入了应用的阶段,随着研究的深入,对移动机器人的自主导航能力,实时监控功能,动态避障策略和时间等方面提出了更高的要求。
本次设计的简易智能小车,采用AT89C51单片机作为小车的检测和控制核心;采用无线蓝牙来实现对小车运动的状态的控制;采用霍尔元件来测量小车运行速度,旋转角度;采用智能手机来实现小车的视频传输模块。
无线控制模块使小车具备启动停止,加减速、转向等功能;视频传输模块使小车具备实时监控,定位等功能;最后将两者通过单片机联系到一起,实现所智能无线控制小车的基本功能。
本设计的智能小车结构简单,技术发展成熟,较容易实现,但各模块之间的联系、软件设计以及整个系统的优化都具有很大的灵活性。
不管采用什么思路,智能化、人性化,一定程度在小车上得以体现。
关键词蓝牙控制模块;霍尔元件;太阳能电池板;单片机The research on Intelligent Wareless Robot CarAbstractAs a new product of modern society, intelligence is the trend in future development. It can work in some specific environment according to the mode which sets in advance. Dispensing with behavior adjustment management,but it can achieve the expected, even higher goal.With the rapid development of computer, network, mechanical, electronic, information, automation and artificial intelligence technology, the mobile robot has entered a new stage. Currently, the study about intelligent mobile robot,unmanned autonomous car and some relevant areas are reaching a application stage.With further research, the mobile robot autonomous navigation capabilities, real-time monitoring, dynamic obstacle avoidance strategies and time put forward higher requirements.The design takes micro control unit AT89C51 as center control unit,use the Bluetooth to control the moving status,use Hall Element to measure the speed of the car and the angle of rotation; use intelligent mobile phone as the Video transmission module. Combine wireless unit and video transmission module together, the the car become the so called mobile robot. It can be controlled to move forward, move backward, turning, speed up and slow down. We can also read this moving status,watch the robot’s surroundings through computer or intelligent mobile phone.The design of the smart car structure is simple and the technology is developed, thus making it easy to achieved. But the combination of all modules,the Bluetooth unit is still challengeable. Besides, the software design,optimization of the entire system is also flexibility. No matter what ideas, artificial Intelligence can be applied with the intelligent toy car.Keywords Bluetooth control module; Hall Element; solar panel; MCU目录摘要 (I)Abstract ................................................................................................................ I I 第1章绪论.................................................................................................... - 1 - 1.1 课题背景 ............................................................................................... - 1 - 1.2 智能小车的研究现状........................................................................... - 2 - 1.3 本章小节............................................................................................... - 2 - 第2章智能小车的可行性分析.................................................................... - 4 - 2.1 题目分析 ............................................................................................... - 4 - 2.2 方案选择 ............................................................................................... - 4 - 2.3 总体方框图 ........................................................................................... - 5 - 2.4 本章小节 ............................................................................................... - 6 - 第3章硬件设计............................................................................................ - 7 - 3.1 主控模块的设计 ................................................................................... - 7 -3.1.1 单片机的内部结构......................................................................... - 8 -3.1.2 单片机的引脚功能......................................................................... - 8 -3.1.3 单片机最小系统............................................................................. - 9 - 3.2 无线通讯模块设计 ............................................................................. - 12 -3.2.1 蓝牙模块的选择.......................................................................... - 13 -3.2.2 蓝牙模块BF10 ............................................................................. - 13 - 3.3 小车车体设计 ..................................................................................... - 16 -3.3.1 小车车体的结构设计................................................................... - 16 -3.3.2 电机及驱动的选用....................................................................... - 17 - 3.4 摄像头云台设计 ................................................................................. - 20 -3.4.1 云台电机及其驱动的选择........................................................... - 21 -3.4.2 云台的结构设计........................................................................... - 23 - 3.5 无线视频传输模块设计 ..................................................................... - 24 - 3.6 电源模块设计 ..................................................................................... - 26 -3.6.1 太阳能电池板............................................................................... - 26 -3.6.2 电源测试....................................................................................... - 27 -3.6.3 实际应用............................................................ 错误!未定义书签。
遥控小车控制系统设计

遥控小车控制系统设计遥控小车是一种通过无线遥控装置对小车进行控制和操作的系统。
遥控小车控制系统的设计主要包括硬件设计和软件设计两个方面。
接下来,我们将进行详细的介绍。
一、硬件设计1.遥控器设计:遥控器是用来发送信号给小车控制器的装置,通常由按键、遥控芯片、无线发送模块等组成。
按键用于设置小车的速度、方向等参数,遥控芯片用于编码按键输入信号,无线发送模块用于将编码后的信号发送给小车控制器。
2.小车控制器设计:小车控制器是用来接收遥控器发送的信号,并控制小车的运动的装置,通常由接收模块、驱动模块、电源管理模块等组成。
接收模块用于接收遥控器发送的信号,驱动模块用于控制小车的电机转动,电源管理模块用于管理小车的电源供给。
3.电机驱动设计:电机驱动是用来控制小车轮子转动的装置,通常由电机驱动芯片、电机驱动电路等组成。
电机驱动芯片用于接收来自小车控制器的指令,并控制电机的转动方向和速度,电机驱动电路用于提供电源给电机,使其能够正常工作。
二、软件设计1.遥控器软件设计:遥控器软件主要包括按键扫描、信号编码和无线发送等功能。
按键扫描用于检测按键的状态,并将按键输入信号发送给信号编码模块;信号编码用于将按键输入信号编码成数字信号;无线发送用于将编码后的信号通过无线发送模块发送给小车控制器。
2.小车控制器软件设计:小车控制器软件主要包括信号接收、控制逻辑和电机控制等功能。
信号接收用于接收来自遥控器的信号,解码并分析信号内容;控制逻辑用于根据信号内容制定相应的控制策略;电机控制用于根据控制策略控制电机的转动方向和速度。
3.电机驱动软件设计:电机驱动软件主要包括电机控制和速度调节等功能。
电机控制用于接收来自小车控制器的指令,并控制电机的转动方向和速度;速度调节用于根据控制策略调节电机的转速,以实现小车的加速、减速等功能。
以上是遥控小车控制系统的设计内容和要点,通过合理的硬件设计和软件设计可以实现对小车的远程控制和操作。
小车远程编程操作方法
小车远程编程操作方法小车远程编程操作方法,也被称为远程控制小车,是一种通过无线信号远程控制小车运动的方法。
这种方法通常使用无线模块或Wi-Fi模块来实现,其中无线模块可以是蓝牙模块、射频模块、红外线模块等。
下面将详细介绍小车远程编程操作方法的步骤和实现原理。
首先,实现小车远程编程操作需要使用到硬件设备和软件工具。
硬件设备包括小车和无线模块,其中无线模块需要与小车进行连接。
软件工具包括编程语言和开发环境,编程语言可以选择Python、C++、Arduino等,开发环境可以使用Arduino IDE、Visual Studio等。
接下来,根据具体的硬件设备和软件工具,进行以下步骤来实现小车远程编程操作方法。
1.准备工作:a.选好硬件设备和软件工具,确保它们的兼容性和可用性。
b.连接无线模块到小车上,确保无线模块和小车之间的通信正常。
2.编写远程控制程序:a.选择合适的编程语言,编写远程控制程序。
b.在程序中,通过无线模块与小车建立通信,发送指令控制小车的运动。
c.可以在程序中设置多种控制指令,例如前进、后退、左转、右转等。
3.编程调试:a.将编写好的程序上传到开发环境中。
b.连接开发环境与无线模块,确保软件与硬件之间的通信正常。
c.进行调试,检查程序中的逻辑和代码是否正确,保证指令的正确性和可靠性。
4.远程控制测试:a.将小车放置在合适的位置,并确保周围环境安全。
b.打开控制程序,进行远程控制测试。
c.通过控制程序发送指令,观察小车的运动是否符合预期。
5.优化和改进:a.根据测试结果,进行优化和改进,提高远程控制小车的性能和可靠性。
b.可以添加更多的功能,例如声音控制、遥控操控等,使远程控制更加灵活和便捷。
小车远程编程操作方法的实现原理是通过无线模块与小车进行通信。
当无线模块接收到控制指令后,会将指令传输给小车,小车根据指令控制电机的运动,从而实现小车的远程控制。
总结起来,小车远程编程操作方法是一种通过使用无线模块或Wi-Fi模块实现远程控制小车运动的方法。
基于ZigBee无线控制小车设计与实现
计算机科学与技术学院《ZigBee无线网络原理》课程设计报告设计题目:基于ZigBee无线小车的设计设计人员:学号:学号:学号:学号:学号:指导教师:2015年4月目录摘要 (I)ABSTRACT ........................................................................................................................ I I 1设计目标. (1)2设计内容 (1)3设计方案 (3)4实验所需器材 (3)5实验各个模块的相关电路设计 (3)5.1 L298N直流电机驱动的相关参数 (3)5.2 L298N的驱动原理图 (4)5.4 直流电机原理图 (5)6实验软件设计 (5)6.1 基于VB语言上位机控制程序: (5)6.2 ZigBee核心板下位机核心部分 (8)7作品实物图展示 (10)8实验小组成员分工 (12)9实验总结 (12)10.小组成员评分 (13)ZigBee无线小车摘要随着物联网的兴起,ZigBee技术以其独有的优势正在为我们提供更多优质便捷的技术成果。
本课题研究的是基于ZigBee技术,设计和实现了一种无线遥控小车新的解决方案。
设计以电脑控制端、ZigBee技术、电机驱动模块等硬件模块组成的遥控小车。
实现小车的前进、后退、前左转弯、前右转弯、后左转弯、后右转弯等实时控制功能。
为遥控玩具小车的设计提供了一种新思路,同时可以为将来智能家居的遥控设计提供一定的参考意义。
【关键词】ZigBee核心板智能小车无线控制ABSTRACTWith the rise of the Internet of Things,the ZigBee with its unique advantage provide us more quality and convenient technological achievements. The research is based on the ZigBee controlled smart car design, by means of ZigBee design and implementation of a wireless remote control car new solutions. Control platform designed for PC, ZigBee module, motor drive module and other hardware module remote control car. Realize the car forward, backward, turn left in front, front right turn after turn left, turn right after the other real-time control functions. For the remote control toy car design presents a new way of thinking, and can for the future smart home remote control designed to provide some reference value.[key words] ZigBee Intelligent car Wireless control1设计目标本次设计要求实现一个PC端可以控制小车的前进、后退、左转和右转。
无线遥控智能小车的设计pdf
引言概述:无线遥控智能小车的设计是一个将无线通信和智能控制技术相结合的项目。
该设计通过无线遥控来控制小车的行动,同时通过智能控制算法使其能够自动避障和巡航等功能。
本文将详细介绍无线遥控智能小车设计的各个方面,包括硬件设计、软件设计、通信技术选择、避障和巡航算法实现等内容。
正文内容:一、硬件设计1.主控单元选型:介绍主控单元选择的几个关键因素,如处理能力、通信能力、外设接口等,并给出推荐的主控单元选型。
2.动力系统设计:阐述小车动力系统的设计原理和选用电机的考虑因素,以及电路设计和电源系统设计。
3.传感器选择与接口设计:分析选择适合的传感器,并详细介绍传感器的接口设计。
4.无线通信模块设计:介绍无线通信模块的选择和设计,包括通信协议选择、通信距离和通信速率等。
5.外观设计:介绍小车外观设计的几个关键方面,包括外壳材料的选择、外形设计和装饰等。
二、软件设计1.控制系统架构设计:介绍控制系统的总体架构设计,包括遥控控制和自动控制模式的切换设计。
2.无线通信协议的实现:分析选择适合的无线通信协议,并详细介绍协议的实现原理和通信流程。
3.遥控控制算法设计:介绍遥控模式下的控制算法设计,包括信号解析、指令发送和驱动控制等。
4.自动控制算法设计:介绍自动控制模式下的控制算法设计,包括避障算法、巡航算法和路径规划等。
5.图形界面设计:详细介绍图形界面设计的几个关键方面,包括界面布局、控件设计和交互设计等。
三、通信技术选择1.无线通信技术的分类:分析无线通信技术的分类,并比较它们的优缺点,为后续的技术选择提供依据。
2.无线通信技术选择标准:介绍无线通信技术选择的一些标准,包括通信距离、通信速率、抗干扰能力等。
3.无线通信技术比较:对几种常见的无线通信技术进行比较,包括蓝牙、Wi-Fi、红外线等,分析其适用场景和应用范围。
4.无线通信技术的实现:详细介绍选择的无线通信技术的实现原理和通信协议。
5.无线通信技术的未来发展:展望无线通信技术的未来发展趋势,分析其在智能小车设计中的应用前景。
无线遥控循迹小车设计方案

无线遥控循迹小车设计方案1 方案设计与论证本次竞赛要求制作的小车能够循黑线前进并且达到竞速的目的,而且要显示走过的时间和速度。
并且有按键起车与声光语言提示。
根据题目的要求,我们组设计了以下几种方案并对各方案进行了论证与分析。
1.1 电机驱动部分论证与分析方案1:采用电阻网络或数字电位器调整电动机的分压,从而达到调速的目的。
但是电阻络只能实现有级调速,而数字电阻的元器件价格昂贵。
更主要的问题在于一般电动机的电阻较小,但电流很大;分压不仅会降低效率,而且很难实现。
方案2:采用继电器对电动机的开或关进行控制,通过开关的切换对小车的速度进行调整。
方案的优点是电路较为简单,缺点是继电器的响应时间慢,机械结构易损坏,寿命较短,可靠性不高。
方案3:采用达林顿管TIP4组成的PWN fe路。
用单片机控制达林顿管使之工作在占空比可调的状态,精确调整电机转速。
方案4:采用L298N来控制电机的正转和反转来实现小车的前进和后退,并且如果再利用上PWM就可以实现整车的加速与减速,精确小车的速度。
基于上述理论分析,拟选择方案4。
1.2 传感器探测部分论证与分析方案1:用光敏电阻组成光敏探测器。
光敏电阻的阻值可以跟随周围环境光线的变化而变化。
当光线照射到白线上面时,光线发射强烈,光线照射到黑线上面时,光线发射较弱。
因此光敏电阻在白线和黑线上方时,阻值会发生明显的变化。
将阻值的变化值经过比较器就可以输出高低电平。
但是这种方案受光照影响很大,不能够稳定的工作。
因此我们考虑其他更加稳定的方案。
方案2:用红外发射管和接收管自己制作光电对管寻迹传感器。
红外发射管发出红外线,当发出的红外线照射到白色的平面后反射,若红外接收管能接收到反射回的光线则检测出白线继而输出低电平,若接收不到发射管发出的光线则检测出黑线继而输出高电平。
这样自己制作组装的寻迹传感器基本能够满足要求,但是工作不够稳定,且容易受外界光线的影响,因此我们放弃了这个方案。
基于单片机的红外遥控智能小车设计

基于单片机的红外遥控智能小车设计引言:随着科技的不断发展,智能物联网已经走进了我们的生活。
智能小车作为一种智能化的产品,能够实现远程遥控、自动避障等功能,受到了广大消费者的青睐。
本文就基于单片机的红外遥控智能小车设计进行详细介绍。
一、设计目标本设计的目标是通过红外遥控,实现对智能小车的远程控制,小车能够根据收到的指令进行行驶、避障等操作。
二、设计原理1.主控芯片:本设计使用单片机作为主控芯片,常用的单片机有51系列、AVR系列等,可根据实际需求选择合适的芯片型号。
2.红外遥控模块:红外遥控模块是实现红外通信的设备,可以将遥控器发出的红外信号解码成数据,实现遥控操作。
3.电机驱动模块:电机驱动模块可将单片机的PWM信号转化为电机的动力驱动信号,控制小车的行驶方向和速度。
4.超声波传感器:超声波传感器可以感知到小车前方的障碍物距离,根据测得的距离,进行相应的避障操作。
5.电源模块:小车需要使用适当的电源,通常是锂电池或者直流电源供应。
三、系统设计1.硬件设计:(1)搭建小车底盘:根据所选择的底盘,搭建小车结构,并安装好电机驱动模块、电源模块等硬件设备。
(2)连接电路:将红外遥控模块、超声波传感器等硬件设备与主控芯片进行连接,确保每个模块正常工作。
2.软件设计:(1)红外遥控程序设计:通过红外遥控模块接收红外信号,并解码成相应的指令。
根据指令控制电机驱动模块,实现小车的行驶方向和速度控制。
(2)超声波避障程序设计:根据超声波传感器测得的距离,判断是否有障碍物,如果有障碍物就停止或者转向。
四、实验结果和讨论经过实验验证,本设计的红外遥控智能小车能够准确接收红外信号,并根据指令控制小车的行驶方向和速度。
同时,超声波传感器能够及时感知到前方的障碍物,并进行相应的避障操作。
然而,该设计仍然存在一些不足之处,比如超声波传感器的测距范围有限,可能无法感知到较小的障碍物。
此外,红外遥控信号的传输距离也有一定限制,需要保持遥控器与小车之间的距离不过远。
无线遥控小车设计报告

修後2栄衣挈题目:基于STM32勺无线遥控小车的设计专业: 班级: 姓名: 学号: 成绩:年 月曰课程设计要求与参数 课设要求设计一个基于STM32微控制器的无线遥控小车,车上装有无线模块,通过 遥控器远程控制小车的运动状态。
实现小车的前进、后退、停止、左转弯、右转弯、导师签字:加速、减速等控制。
参数飞思卡尔智能车体,车轮直径55mm电池电压:12VSTM32F103ZET最小系统:供电电压3.3VNRF24L01无线模块:供电电压3.3VBTN7971B!机驱动模块:供电电压5V---15V360度舵机降压模块日程安排12月15日一一12月16日:查阅相关资料,确定设计思路,提出设计方案12月17日一一12月19日:搭建小车模型,设计硬件电路12月20日一一12月23日:完成软件部分的编程设计12月24日:硬件及软件测试12月25日:完成课程设计报目录课程设计要求与参数---------------------------------- 1 课设要求------------------------------------- 1参数--------------------------------------- 1日程安排------------------------------------- 1第一章课题研究的目的、背景、意义------------------------ 31.1课题研究的目的------------------------------- 31.2课题研究的背景------------------------------- 31.3课题研究的意义 ------------------------------ 4第二章设计方案------------------------------------ 52.1设计思路----------------------------------- 52.2硬件设计方案------------------------------- 62.3软件设计方案------------------------------- 6第三章硬件设计------------------------------------ 73.1STM32F103ZET6简介-------------------------- 73.2NRF24L01 无线模块--------------------------- 83.2.1 NRF24L01 无线模块简介 --------------------- 83.2.2 无线模块与微控制器的连接 ---------------------- 93.3舵机------------------------------------- 93.4BTN7971B电机驱动模块 ------------------------- 93.5 遥控器设计---------------------------------- 10第四章软件设计------------------------------------ 11第五章调试与测试---------------------------------- 13结论------------------------------------------ 14参考文献--------------------------------------- 14第一章课题研究的目的、背景、意义1.1课题研究的目的掌握嵌入式软件项目的设计流程掌握MDK-ARM开发环境的基本使用方法掌握NRF24L0无线模块的通信协议及使用方法掌握脉冲宽度调制(PWM的原理及应用掌握直流电机调速的方法1.2课题研究的背景随着社会的发展,人们对科学技术的要求越来越高,在我们的身边随处都可见一些高科技的产物,这些是时代的产物。
基于单片机控制的wifi智能小车毕业设计

篇一:基于51单片机WiFi智能小车制作
基于51单片机WiFi智能小车制作
一、基本原理
51单片机WiFi智能小车是利用PC或手机作为控制端,通过手机连接wifi模块(路由器)以获得wifi信号,同时车载也连接wifi模块以获得和手机相同的IP地址,实现手机和小车的连接,然后利用PC或手机上的控制软件以wifi网络信号为载体发送相关信号,wifi模块接收PC或手机端发送来的相关信号并分析转换成TTL电平信号,然后发送给单片机,单片机接收到的电平信号处理、分析、计算,转化成控制指令并发送给电机驱动模块以实现小车的前进、后退、左拐、右拐等功能。
第1章
1.1
1.2
第2章
2.1
2.2
2.3 绪论 ................................................................................. 错误!未定义书签。 智能小车的意义和作用 ........................ 错误!未定义书签。 智能小车的现状 ............................................... 1方案设计与论证 ............................................................................................... 2 主控系统 ..................................................... 2 电源模块 ..................................................... 2 电机驱动模块 ................................................. 3
wifi智能小车毕业设计
wifi智能小车毕业设计wifi智能小车毕业设计随着科技的不断发展,智能化已经成为了现代社会的一个重要趋势。
在这个背景下,智能小车作为一种应用广泛的智能设备,正受到越来越多人的关注。
本文将介绍一个基于wifi技术的智能小车毕业设计,探讨其设计原理、功能特点以及未来的发展前景。
一、设计原理该智能小车的设计基于wifi技术,通过无线网络连接实现与用户的交互和控制。
整个系统主要由三个部分组成:智能小车、控制端和服务器。
智能小车是整个系统的核心部分,它搭载了各种传感器和执行器,可以感知环境并执行相应的动作。
通过wifi模块,智能小车可以与控制端进行通信,接收控制指令并发送传感器数据。
控制端是用户与智能小车进行交互的工具,可以是电脑、手机或者平板等设备。
用户可以通过控制端发送指令给智能小车,控制它的运动、转向以及其他功能。
服务器是整个系统的中枢,负责接收用户发送的指令并将其转发给智能小车。
同时,服务器也负责接收智能小车发送的传感器数据,并将其展示给用户。
二、功能特点1. 远程控制:用户可以通过控制端远程控制智能小车的运动和转向。
无论用户身处何地,只要有网络连接,就可以实现对智能小车的控制。
2. 自动避障:智能小车搭载了红外传感器和超声波传感器,可以感知前方的障碍物,并自动避开。
这样可以保证智能小车在运行过程中不会碰撞到障碍物。
3. 视频监控:智能小车还搭载了摄像头,可以实时传输视频到控制端。
用户可以通过控制端观察智能小车周围的环境,实现远程监控的功能。
4. 数据记录与分析:智能小车可以将传感器数据发送到服务器,服务器将这些数据保存下来并进行分析。
用户可以通过控制端查看历史数据,并对数据进行分析和处理。
三、未来发展前景随着物联网技术的不断发展,智能小车的应用前景将会更加广阔。
未来,智能小车可以与其他智能设备进行联动,实现更多的功能。
例如,智能小车可以与智能家居设备进行连接,实现智能家居的控制和管理。
用户可以通过控制端一键控制家中的灯光、电器等设备,实现智能化的生活方式。
张乐基于zigbee技术的无线遥控小车设计
单位代码: 005分类号: TN延安大学西安创新学院本科毕业论文(设计)题目:基于ZigBee技术的无线遥控小车的设计专业:电子信息工程姓名:张乐学号:0903024145 指导教师:马惠铖职称:讲师毕业时间:二零一三年六月基于zigbee技术的无线遥控小车设计摘要:近年来,无线通信的发展蒸蒸日上,在此过程中也出现了各种无线网络数据传输标准,Wireless USB、Bluetooth、WIFI、ZigBee等。
在当今无线通信领域中,各种无线通信网络各具特色。
Wireless USB 主要适用于音频、视频等媒体数据的传输,WIFI 主要使用于大量数据的传输,而Zigbee则以其传输距离远、低速率、低功耗、低成本等优良性能使其成为无线通信领域中的一颗耀眼之星。
随着电子行业的发展,无线控制、无线数据传输等必将是今后的电子行业的发展趋势,无人驾驶的遥控小车也必将进入一个实用型的阶段。
人们可以远程通过PC机及具备嵌入式系统的高速单片机对小车下达控制命令,其可应用于科学勘探、车载智能系统等领域,其价值不言而喻。
本设计主要基于A VR(Atmega 16)单片机及Zigbee(CC2530)无线通信模块,设计PC 机远程无线遥控小车及监控终端,其具备完善的软硬件系统,很好的实现了小车的前后行进,转向以及辅助灯光指示,该设计中,硬件系统电路结构简单、安全可靠、响应速度快;PC机操作界面简洁,数据传输稳定,易于操控。
关键词:无线遥控小车;Atmega 16;ZigbeeThe Design of wireless remote control carBased on zigbeeAbstract: in recent years, Wireless communication development progresses day by day, in the process, also appeared a variety of Wireless network data transmission standards, Wireless USB, Bluetooth, WIFI, ZigBee, etc. All kinds of wireless communication network has more perfect wireless network data transmission standards. In today's wireless communication domain, each of them has its own characteristics. Wireless USB is mainly suitable for audio, video and other media data transmission, the WIFI is mainly used in large amounts of data transmission, and Zigbee is mainly used for long distance, low transmission rate, low power consumption, low cost, etc. With the development of the electronics industry, the popularity of intelligent field will be more and more wide, it will be the future trend of the development of electronic industry. Unmanned remote control car will enter a practical application field. People can remote through the PC and embedded system of car control orders, it can be applied to scientific exploration, vehicle intelligent systems and other fields, its value is self-evident. This paper mainly introduces the based on A VR MCU (Atmega 16) and Zigbee (CC2530) wireless communication module design of the wireless remote control car, the design is based on the actual application and established. Has perfect software and hardware system, the very good implementation, before and after the car steering and specific path automatically, the whole system circuit is simple in structure, safe and reliable, the test meet the requirements.Key words: Wireless remote control car; Atmega 16; Zigbee.目录1.引言 (1)2.方案论证 (1)2.1车体主控单片机的选用 (1)2.2电机驱动芯片的选择 (2)2.3无线显示终端电路 (3)2.4供电模块 (3)3.系统简述 (3)4.本系统核心器件简介 (4)4.1A TMEGA16单片机 (4)4.2Z IGBEE模块:CC2530 (6)4.3LCD12864显示器 (7)4.4直流减速电机 (9)5.硬件电路设计 (9)5.1电源电路 (9)5.2整体电路原理设计 (10)6.系统设计思路 (11)6.1上位机程序流程图 (12)6.2下位机(小车端)程序流程图 (12)6.3下位机(12864)程序流程图 (13)7.调试及性能分析 (14)7.1硬件调试 (14)7.2性能分析 (14)8.结束语 (15)参考文献 (16)谢辞 (17)附录1 程序清单 (18)附录2 系统原理图 (26)附录3 实物图 (26)1.引言随着智能化普及领域的越来越广,无线遥控小车必将进入一个更为实用的应用领域。
无线远程控制自动小车设计
无线远程控制自动小车设计
袁冬梅;杨英;范然智
【期刊名称】《制造业自动化》
【年(卷),期】2012(034)008
【摘要】针对行驶路径相对固定,并便于绘制的场合,结合AT89S52单片机、NRF24101无线模块和计算机,本文设计了一种无线远程控制自动小车,重点对小车控制系统硬件和软件进行了详细设计.该小车行驶路径由计算机绘制和分析,省去了传统无线智能小车找黑线的麻烦,具有结构简单、远程控制方便、成本低廉等优点,在企业车间、生产线和仓库运输中具有广阔的应用前景.
【总页数】4页(P107-110)
【作者】袁冬梅;杨英;范然智
【作者单位】重庆理工大学汽车学院,重庆400054;重庆理工大学汽车学院,重庆400054;重庆理工大学汽车学院,重庆400054
【正文语种】中文
【中图分类】TP29
【相关文献】
1.基于DSP的无线小车远程控制系统设计与研究 [J], 徐遵磊;张大兴;贾建援
2.基于STM32单片机的电磁感应无线充电自动小车设计 [J], 冉亮;杨川;李攀攀;李静;
3.基于无人搬运小车的无线Mesh漫游测试自动化设计与实现 [J], 袁良伟; 李仁玉; 朱余浩; 黄文君; 孙聃
4.基于无线远程控制的自动化水产养殖投食设备设计 [J], 时正亚;赵俊;黄春香;夏利玲
5.半自动远程控制集装箱门式起重机
大小车定位技术检验研究 [J], 郭聪;仇佳捷
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据
万方数据
万方数据
万方数据
无线远程控制自动小车设计
作者:袁冬梅, 杨英, 范然智, YUAN Dong-mei, YANG Ying, FAN Ran-zhi
作者单位:重庆理工大学汽车学院,重庆,400054
刊名:
制造业自动化
英文刊名:Manufacturing Automation
年,卷(期):2012,34(8)
1.张责林;王俊杰基于FPGA的无线智能车设计[期刊论文]-郑州轻工业学院学报(自然科学版) 2010(01)
2.瞿少成;艾宁;赵桥基于SPCE061A单片机的无线语音控制智能小车的研制[期刊论文]-电子测量技术 2008(12)
3.徐遵磊;张大兴;贾建援基于DSP的无线小车远程控制系统设计与研究[期刊论文]-电子机械工程 2007(03)
4.李华志;黄斌基于图像和传感器信息融合的自导小车系统[期刊论文]-计算机工程与设计 2007(17)
5.唐秀东;刘丽靖;王虹飞智能自动引导小车模型系统设计[期刊论文]-机电工程技术 2007(09)
6.张友方;王锐;张波简易自动仓储搬运智能小车设计[期刊论文]-微型机与应用 2010(12)
7.何立民单片机应用系统设计 2005
8.彭仁明智能小车控制系统的设计[期刊论文]-绵阳师范学院学报 2009(11)
9.陈伯时电力拖动自动控制系统 2000
本文链接:/Periodical_zzyzdh201208032.aspx。