实验一 面向微分方程的数值积分法仿真
实验:控制系统数字仿真之数值积分法
实验:控制系统数字仿真之数值积分法实验目的:学会并掌握数值积分法的基本原理和方法,了解欧拉法,梯型法,龙格一库塔法的区别,并熟练地使用这些方法。
观察并分析整体离散法、分环节离散法、欧拉法、梯形法、龙格•库塔法这几种方法原理上的差别,分析他们各自的优缺点。
实验原理:欧拉法:欧拉法是最简单的单步法,它是一阶的,精度较差。
但由于公式简单,计算方便,也易于理解,所以在讨论微分方程初值问题的数值解时通常先讨论欧拉法。
梯形法:梯形法与欧拉法相比,梯形法的e要比欧拉法的e更接近实际值,它舍弃的部分更少,它在每一步中用了两个点的输入,使得计算更加精确。
龙格•库塔法:龙格一库塔法是采用间接利用台劳展开式的思路,即用在n 个点上的函数值的线性组合來代替的导数,然后按台劳展开式确定其中的系数, 以提高算法的阶数。
这样既能避免计算函数的导数,同时乂保证了计算精度。
由于龙格薦法具有许务优点,故在许IM:包中,它是•个最垄本的算法之一。
实验过程:分环节离散法得出的响应曲线:整体离散法得出的响应曲线:用一阶欧拉法得出的系统响应曲线:欧拉法是求出当前系统的斜率(变化规律),假设这个变化规律在下一次变化前不改变。
那么系统下一次值就能够通过4 .当前值2.斜率3.步长来确定。
比如说系统当前值x (t),斜率x ' (t),仿真步长dt。
那么x (t+dt) =x (t) +x' (t) *dt程序代码:clc; close all; clear all;sampleTime = 0・l;simuTime = 2000;t=sampleTime:sampleTime:simuTime;K=1・2; n=3; T=20;[kp,ki]=PID_Gain(l・ 20z3, 0);x=zeros(l r 4);fori=l:fix(simuTime/sampleTime)u(i)=l;endfori=l:fix(simuTime/sampleTime)e=ST_RK_l(X/ u(i)f kp r ki r T z K, n);x=xfe*sampleTime;y (i)=x(4);endplot (t r y);匸ext=Tvaiuel(y,sampleTime);legend (text);自程序ST_RK_1代码:function E=ST_RK_1(x r u f kp f ki z T r K z n) E(l) = (u-x(4))*ki;E(2)=(x(l)+kp*E(l)/ki)*K/T-x(2)/T;E (3)=x(2)/T-x(3)/T;E(4)=x(3)/T-x(4)/T;end用梯形法得出系统响应曲线:X = e(r)e[(kH)T]e(kT)牙[e(灯)+ e[伙+ 1)门]X(kT) kT (k+l)T 上若采用欧拉法,误差为红色曲线围成的面积,而如果用梯形法,误差减少为蓝色曲线闱成的面积。
第5章 数值积分法仿真讲解
在求解这些微分方程时,最常用、也是最有效的一种 方法就是数值积分法。
5.2 数值积分法仿真的基本原理
对微分方程(5-1)两端同时取积分,可得
t
y(t) y(t0 ) t0 f ( , y)d
t
y(t) y(t0 ) t0 f ( , y)d
当 t tn1 时,上式变为 :
k2
f (tn
h 2
,
yn
h 2
k1
)
其截断误差为:0(h3 )
(5-17)
5.4.3 四阶龙格-库塔方法
4阶龙格-库塔法是一种最常用的方法。其经典表达式为:
yn1
yn
h 6
(k1
2k2
2k3
k4 )
k1 f (tn , yn )
k2
f
(tn
h, 2
1 (h)r
r!
]yn
0(h r 1 )
(5-21)
令: h h
——将其代入上式
得到该式的稳定条件为:
1
1
h
1h 2!
2
1h r!
r
1
( 5-22 )
由此稳定条件,下表给出了各阶龙格-库塔公式的稳定区域。
表5.2 龙格-库塔公式的稳定区域
r
1
h 所在的实稳定区域
分析欧拉法截断误差的思想,同样也适用于其它数值 积分方法。
4、舍入误差 由于计算机的字长有限,数字不能表示得完全精确,
在计算过程中,不可避免地会产生舍入误差。
舍入误差与计算步长成反比。如果计算步长小,计 算次数多,则舍入误差就大。
微分方程数值解法实验报告

微分方程数值解法实验报告2篇微分方程数值解法实验报告(一)在实际科学与工程问题中,我们经常会遇到微分方程的求解。
然而,许多微分方程往往没有解析解,这就需要我们利用数值方法来获得近似解。
本篇实验报告将介绍两种常见的微分方程数值解法:欧拉方法和改进的欧拉方法。
一、欧拉方法欧拉方法是最简单的微分方程数值解法之一。
其基本原理为离散化微分方程,将微分方程中的导数用差商代替。
设要求解的微分方程为dy/dx = f(x, y),步长为h,则可用以下公式进行递推计算:y_{n+1} = y_n +hf(x_n, y_n)二、算法实现为了对欧拉方法进行数值实验,我们以一阶线性常微分方程为例:dy/dx = x - y, y(0) = 1步骤如下:(1)选择合适的步长h和求解区间[a, b],这里我们取h=0.1,[a, b] = [0, 1];(2)初始化y_0 = 1;(3)利用欧拉方法递推计算y_{n+1} = y_n + 0.1(x_n - y_n);(4)重复步骤(3),直到x_n = 1。
三、实验结果与讨论我们通过上述步骤得到了在[0, 1]上的近似解y(x)。
下图展示了欧拉方法求解的结果。
从图中可以看出,欧拉方法得到的近似解与精确解有一定的偏差。
这是因为欧拉方法只是通过递推计算得到的近似解,并没有考虑到更高阶的误差。
所以在需要高精度解时,欧拉方法并不理想。
四、改进的欧拉方法针对欧拉方法的不足,我们可以考虑使用改进的欧拉方法(也称为改进的欧拉-柯西方法)。
它是通过利用前后两个步长欧拉方法得到的结果作为差商的中间项,从而提高了求解精度。
一阶线性常微分方程的改进欧拉方法可以表示为:y_{n+1} = y_n + h(f(x_n, y_n) + f(x_{n+1}, y_n + hf(x_n,y_n)))/2五、算法实现与结果展示将改进的欧拉方法应用于前述的一阶线性常微分方程,我们同样选择h=0.1,[a, b] = [0, 1]。
实验一 面向微分方程的数字仿真 wangxuep
内蒙古科技大学实验报告实验名称:面向微分方程的数字仿真课程名称:计算机仿真技术CAD—基于matlab的控制系统姓名:王雪萍学号: 201102208 日期:2012年4月一 、实验名称Runge-Kutta 法和ode45()函数分别求解下列微分方程组以及高阶微分方程并绘图。
1、321y y y= 312y y y-= 2132y y y-= 在初始条件下:5.0)0( ,5.0)0( ,0)0(321-===y y y ,时间区间]20,0[=t 的离散解。
2、解高阶微分方程组:t y x y x t x 26)3()(2++--= t e x yy x -+-= 初值 4)1(,2)1(==x x 6)1(,7)1(,2)1(==-=yy y 5.11≤≤t 提示:令 x x =1,x x =2,y x =3,y x =4,y x =5,将以上方程化为一阶微分方程组。
二、实验目的1 了解Runge-Kutta 法的特点以及具体实现过程。
2了解ode45函数的应用。
3 应用matlab 软件编写Runge-Kutta 算法程序。
4通过两种方法实验结果来验证自己编写的程序是否正确。
三、实验环境Win7系统、matlab7.1数值计算软件 四、实验内容1 根据Runge-Kutta 算法的特点,设计程序流程如下图(1)所示:图(1)Runge-Kutta算法流程图2 用matlab语言编程Runge-Kutta算法程序以及ode45函数实验程序。
(1)第1题求解:①将微分方程组写成一个M函数。
function dy=test_fun(x,y)dy = zeros(3,1);dy(1) = y(2) * y(3);dy(2) = -y(1) * y(3);dy(3) = -2 * y(1) * y(2);end②通用的runge_kutta1函数。
function [x,y]=runge_kutta1(ufunc,y0,h,a,b)%参数表顺序依次是微分方程组的函数名称,初始值向量,步长,时间起点,时间终点(参数形式参考了ode45函数)n=floor((b-a)/h);%求步数x(1)=a;%时间起点y(:,1)=y0;%赋初值,可以是向量,但是要注意维数for ii=1:nx(ii+1)=x(ii)+h;k1=ufunc(x(ii),y(:,ii));k2=ufunc(x(ii)+h/2,y(:,ii)+h*k1/2);k3=ufunc(x(ii)+h/2,y(:,ii)+h*k2/2);k4=ufunc(x(ii)+h,y(:,ii)+h*k3);y(:,ii+1)=y(:,ii)+h*(k1+2*k2+2*k3+k4)/6;%按照龙格库塔方法进行数值求解end③在命令窗口输入如下的程序:[T,F] = ode45(@test_fun,[0 20],[0 0.5 -0.5]); subplot(121)plot(T,F)title('ode45函数效果')[T1,F1]=runge_kutta1(@test_fun,[0 0.5 -0.5],0.5,0,20); subplot(122)plot(T1,F1)title('自编的龙格库塔函数')legend('y1','y2','y3')④实验所得到的图形如下图(2)所示:5101520-0.5-0.4-0.3-0.2-0.100.10.20.30.40.5ode45函数效果5101520-0.5-0.4-0.3-0.2-0.100.10.20.30.40.5图(2)第1题的图形 (2)第1题另外一种方法①Runge-Kutta 算法程序如下: Tf=input('请输入仿真时间tf=');h=input('请输入仿真步长h='); y1=0;y2=0.5;y3=-0.5;t=0; y1out=0;y2out=0.5;y3out=-0.5; for i=1:Tf/hk11=y2*y3; k21=-y1*y3; k31=-2*y1*y2;k12=(y2+k21*h/2)*(y3+k31*h/2); k22=-(y1+k11*h/2)*(y3+k31*h/2); k32=-2*(y1+k11*h/2)*(y2+k21*h/2);k13=(y2+k22*h/2)*(y3+k32*h/2);k23=-(y1+k12*h/2)*(y3+k32*h/2);k33=-2*(y1+k12*h/2)*(y2+k22*h/2);k14=(y2+k23*h)*(y3+k33*h);k24=-(y1+k13*h)*(y3+k33*h);k34=-2*(y1+k13*h)*(y2+k23*h);y1=y1+h/6*(k11+2*k12+2*k13+k14);y2=y2+h/6*(k21+2*k22+2*k23+k24);y3=y3+h/6*(k31+2*k32+2*k33+k34);y1out=[y1out;y1];y2out=[y2out;y2];y3out=[y3out;y3];t=[t;t(i)+h];endplot(t,y1out,'-',t,y2out,'-.',t,y3out,'.')gridxlabel('t')ylabel('y1 y2 y3')title('R-T法')legend('y1','y2','y3')运行上述程序后:输入:tf=20,h=0.5后得到图像入下图(3)所示:ty 1 y 2 y 3图(3)龙哥库塔法下的曲线 ②应用ode45函数的程序如下:写一个名为rigid 的M 文件:function dy = rigid(t,y) dy = zeros(3,1); dy(1) = y(2) * y(3); dy(2) = -y(1) * y(3); dy(3) = -2* y(1) * y(2); end在命令窗口中输入:options = odeset('RelTol',1e-4,'AbsTol',[1e-4 1e-4 1e-5]); [t,y] = ode45(@rigid,[0 20],[0 0.5 -0.5],options); plot(t,y(:,1),'-',t,y(:,2),'-.',t,y(:,3),'.') gridtitle('ode45法')legend('y1','y2','y3')其图形如下图(4)所示:图(4)ode45法求解曲线(3)第二题求解:对于高价微分方程的求解的问题,将其化为一阶常微分方程组后求解。
实验09 数值微积分与方程数值解(第6章)
实验09 数值微积分与方程数值求解(第6章 MATLAB 数值计算)一、实验目的二、实验内容1. 求函数在指定点的数值导数232()123,1,2,3026x x x f x x xx x==2. 用数值方法求定积分(1) 210I π=⎰的近似值。
程序及运行结果:《数学软件》课内实验王平(2) 2221I dx x π=+⎰程序及运行结果:3. 分别用3种不同的数值方法解线性方程组6525494133422139211x y z u x y z u x y z u x y u +-+=-⎧⎪-+-=⎪⎨++-=⎪⎪-+=⎩ 程序及运行结果:4. 求非齐次线性方程组的通解1234123412342736352249472x x x x x x x x x x x x +++=⎧⎪+++=⎨⎪+++=⎩5. 求代数方程的数值解(1) 3x +sin x -e x =0在x 0=1.5附近的根。
程序及运行结果(提示:要用教材中的函数程序line_solution ):(2) 在给定的初值x 0=1,y 0=1,z 0=1下,求方程组的数值解。
23sin ln 70321050y x y z x z x y z ⎧++-=⎪+-+=⎨⎪++-=⎩6. 求函数在指定区间的极值(1) 3cos log ()xx x x xf x e ++=在(0,1)内的最小值。
(2) 33212112122(,)2410f x x x x x x x x =+-+在[0,0]附近的最小值点和最小值。
7. 求微分方程的数值解,并绘制解的曲线2250(0)0'(0)0xd y dyy dx dx y y ⎧-+=⎪⎪⎪=⎨⎪=⎪⎪⎩程序及运行结果(注意:参数中不能取0,用足够小的正数代替):令y 2=y,y 1=y ',将二阶方程转化为一阶方程组:'112'211251(0)0,(0)0y y y x x y y y y ⎧=-⎪⎪=⎨⎪==⎪⎩8. 求微分方程组的数值解,并绘制解的曲线123213312123'''0.51(0)0,(0)1,(0)1y y y y y y y y y y y y =⎧⎪=-⎪⎨=-⎪⎪===⎩程序及运行结果:三、实验提示四、教程:第6章 MATLAB 数值计算(2/2)6.2 数值微积分 p155 6.2.1 数值微分1. 数值差分与差商对任意函数f(x),假设h>0。
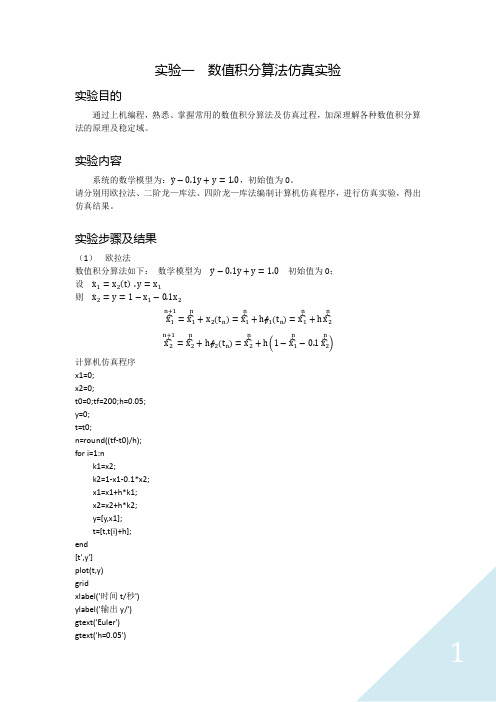
实验一 数值积分算法仿真实验
3
计算机仿真输出图像 h=0.05
h=5.00
h=10.00
4
(3) 四阶龙—库法 数值积分算法如下: 数学模型为 设
初始值为 0;
计算机仿真程序 x1=0; x2=0; t0=0;tf=200;h=0.8; y=0; t=t0; n=round((tf-t0)/h); for i=1:n k11=x2; k21=1-x1-0.1*x2; k12=x2+h/2*k21; k22=1-(x1+h/2*k11)-0.1*(x2+h/2*k21); k13=x2+h/2*k22; k23=1-(x1+h/2*k12)-0.1*(x2+h/2*k22); k14=x2+h*k23; k24=1-(x1+h*k13)-0.1*(x2+h*k23); x1=x1+h/6*(k11+2*k12+2*k13+k14); x2=x2+h/6*(k21+2*k22+2*k23+k24); y=[y,x1]; t=[t,t(i)+h]; end [t',y'] plot(t,y) grid gtext('RK-4') gtext('h=0.8')
5
计算机仿真输出图像 h=0.80
h=5.00
h=10.00
6
实验结论
1、 2、 3、 4、 数值积分算法对仿真建模有三个基本要求:稳定性、准确性、快速性; 随着步距 h 的增大,仿真结果准确性逐渐降低,但速度也随之降低; 在三次仿真中, 四阶龙-库法精度最高, 可以看出, 计算量增加精度提高; 在不同的仿真计算中,要综合考虑要求精度及其运行速度选择合适的仿 真方法及步距,在既保证精度的情况下提高计算速度。
SS03_数值积分法仿真
第二节 单步法
引理:泰勒级数:如果f(x)在x0点处任意阶可导,则 在该邻域内的n阶泰勒公式为:
f ( x) = ∑
n= n =0
N
f ( n ) ( x0 ) ( x − x0 ) n + Rn ( x) n!
f ( N +1) (ξ ) 其中:RN ( x) = ( x − x0 ) N +1 称为拉格朗日余项 ( N + 1)!
y (t )
截断误差 ∝ h 2
dy dt
dy = f ( y, t ) = ym + K ⋅ h K = f ( ym , t m )
t
ym+1 = ym + K ⋅ h K = f ( ym , tm )
t
tm
h
t m +1
tm
h
tm +1
第 11 页
通常设法寻找一个低一阶的龙格-库塔公式,两者的结果之 差可以设为误差。为减少计算量,Ki通常要求公用。 Runge-Kutta-Merson法 (RK34)
K1 = K = 2 K3 = K 4 = K = 5 f ( ym , t m ) h h h f ( y m + K1 , t m + ) 四阶五级公式: ym +1 = ym + (K1 + 4 K 4 + K 5) 3 3 6 h h h f ( y m + ( K1 + K 2 ) , t m + ) ˆ 三阶4级公式:ym +1 = ym + (3K1 - 9 K 3 + 12 K 4) 6 3 6 h h f ( y m + ( K1 + 3 K 3 ) , t m + ) h 8 2 误差 : Em = (2 K1 - 9 K 3 + 8 K 4 - K 5) h 6 f ( y m + ( K1 + 4 K 4 − 3 K 3 ) , t m + h ) 2
实验一 数值积分算法仿真实验

实验一数值积分算法仿真实验数值积分算法是对微积分中每个基本概念的具体应用,它被广泛应用于数学、工程、物理学、计算机科学等领域。
实验一旨在通过仿真实验来理解数值积分的基本原理以及各种算法的优劣。
1. 实验目的通过本实验,我们将探索数值积分算法的基本原理,以及了解求解积分的各种算法的使用方法和适用范围。
具体而言,本实验的目的包括:1. 理解数值积分的基本原理和方法。
2. 掌握数值积分算法的使用方法和步骤。
3. 比较不同积分算法的优缺点,了解它们适用的范围。
2. 实验内容本实验的具体内容包括:1. Simpson 积分算法的仿真实验3. 辛普森—三分积分算法的仿真实验4. 实验结果的分析与比较3. 实验原理在本次实验中,我们将介绍三种数值积分算法,分别是 Simpson 积分算法、梯形积分算法和辛普森-三分积分算法。
Simpson 积分算法也称为复化 Simpson 公式,是一种求解一定区间内函数积分值的数值计算方法。
这种方法的基本思路是将区间内的几何图形近似为二次函数,从而完成积分的近似计算。
具体而言,这种方法是通过将区间内的函数曲线分成若干个小区间,计算每一个小区间内的积分值,最后将这些积分值加起来得到整个区间内的积分值。
Simpson 积分公式如下所示:$I=\frac{h}{3}(f(x_0)+4f(x_1)+2f(x_2)+4f(x_3)+2f(x_4)+...+4f(x_{n-1})+f(x_n))$其中,$n$ 表示小区间的数目,$h$ 表示每个小区间的长度,$f(x_i)$ 表示区间内的函数值。
3.2 梯形积分算法辛普森-三分积分公式如下所示:$I=\frac{2b-a}{6n}(f(a)+f(b)+2\sum_{j=1}^{n/2}f(x_{2j})+4\sum_{j=1}^{n/2-1}f(x _{2j + 1}))$```% Simpson 积分算法function result = simpson(a,b,f,n)h = (b-a)/n;x = a:h:b;y = f(x);result = h/3*(y(1) + 4*sum(y(2:2:n)) + 2*sum(y(3:2:n-1)) + y(n+1));end我们可以通过实验数据来比较不同积分算法的优缺点。
微分方程模型仿真常微分方程的数值求解微分方程模型

>> [t,y]=ode45('RLC',[0 0.12],[0;0]); >>figure(1) >> subplot(2,1,1); >> plot(t,y(:,1)); >> title('Vc-Time') >> xlabel('Time/sec') >> ylabel('Vc/V') >> subplot(2,1,2); >> plot(t,y(:,2)); >> title('I-Time') >> xlabel('Time/sec') >> ylabel('I/A') >> figure(2) >> plot(y(:,2),y(:,1)) >> title('Vc-I') >> xlabel('I/A') >> ylabel('Vc/V')
第6章 微分方程模型仿真
常微分方程的数值求解 微分方程模型的建立及仿真
1
6.1 微分方程的求解
在现在数学研究和工程实践中,很多数学模型都是
用微分方程确定的,很多基本方程本身就是一个微分方
程,因此求微分方程非常重要,但是大部分的微分方程 目前难以求得其解析解,因此人们只有利用计算机强大 的计算功能来求其数值解。MATLAB主要使用龙格-库 塔法求解微分方程。 在控制系统仿真中,常用的求微分方程数值解的函 数是ode23和ode45。
19
闭环DC/DC变换器的结构框图如下:
哈工大 计算机仿真技术实验报告 实验3 利用数值积分算法的仿真实验
模型的稳定性:当步距 h=5.0e-5 时,前向欧拉法和后向欧拉法明显失真, 随着步距的减小, 二阶显式 Adams 法, 梯形法和显式四阶 Runge-Kutta 法的波形 变化不大,而前向欧拉法和后向欧拉法的波形得到明显改善。所以显式四阶 Runge-Kutta 法,二阶显式 Adams 法和梯形法的稳定性较好,前向欧拉法和后向 欧拉法的稳定性较差。 模型的精度和离散时间间隔:步距为 h=5.0e-6 时,显式四阶 Runge-Kutta 法 精度最高,其次是二阶显式 Adams 法和梯形法。步距为 h=5.0e-7 时,前向欧拉 法和后向欧拉法仿真精度才达到要求。所以,显式四阶 Runge-Kutta 法,二阶显 式 Adams 法和梯形法模型的精度较高,离散时间间隔要求低,其中,显式四阶 Runge-Kutta 法模型的精度最高,其次是二阶显式 Adams 法,由于是二次函数较 复杂,函数曲线与真实曲线较为接近;再次精确的是梯形法,取梯形面积,误差 也较小;前向欧拉法和后向欧拉法模型的精度较低,由于取的是矩形面积,离散 时间间隔要求高。
实验 3 利用数值积分算法的仿真实验
(
一、 实验目的
1) 熟悉 MATLAB 的工作环境;
2) 掌握 MATLAB 的 .M 文件编写规则,并在命令窗口调试和运行程序; 3) 掌握利用欧拉法、梯形法、二阶显式 Adams 法及四阶龙格库塔法构建系 统仿真模型的方法,并对仿真结果进行分析。
二、实验内容
上对应的标题。
四、实验原理
在连续系统的数字仿真算法中,较常用的有欧拉法、 梯形法、 二阶显式 Adams 法及显式四阶 Runge-Kutta 法等。欧拉法、梯形法和二阶显式 Adams 法是利用离 散相似原理构造的仿真算法,而显式四阶 Runge-Kutta 法是利用 Taylor 级数匹配 原理构造的仿真算法。 对于线性系统,其状态方程表达式为:
实验一 数值积分算法的实验概要
实验一 数值积分算法的实验一、实验目的1. 初步了解如何用仿真方法来分析系统的动态性能。
2. 了解不同的数值积分算法与仿真计算的精度之间的关系。
3. 学会一种初步寻求合理仿真步长的方法。
二、实验内容系统模型及其单位阶跃响应如习题2.6所示。
1. 按实验目的、要求和已知条件,建立系统的Simulink 模型。
2. 按经验公式(2.43)或(2.44)初选仿真步长h 。
3. 选择RK4法,运行仿真模型,适当调整步长和仿真起止时间,以得到比较理想的过渡过程,观察纪录此过渡过程的数据。
4. 在相同的条件下,选择欧拉法,再让仿真模型运行,观察纪录过渡过程的数据。
三、预习要求1. 复习数值积分算法及步长寻取方法。
2. 按理论分析初步估计系统可能出现的动态性能。
3. 求c 或min T 。
四、实验报告要求1. 整理各种实验条件下的打印数据和曲线。
2. 将各仿真结果与标准解比较,分析不同数值积分算法对仿真精度的影响。
实验二常用快速数字仿真算法的实验一、实验目的1. 掌握常用的快速数字仿真算法:双线性变换法和根匹配法。
2. 根据连续系统的结构图能够建立相应快速算法的simulink模型,并进行仿真,比较两者之间的差异。
二、实验内容系统模型及其单位阶跃响应如习题2.26所示。
1. 按实验目的、要求和已知条件,分别采用双线性变换法和根匹配法求取对应的脉冲传递函数和相应的差分方程。
2. 建立二阶低通滤波器的系统的Simulink模型,并分别求单位阶跃响应,参照【例2.10】完成。
3. 观察纪录两种方法下的阶跃响应曲线,并作比较。
三、预习要求1. 复习双线性变换法和根匹配法。
2. 按理论分析分别求出双线性变换法和根匹配法对应的脉冲传递函数和相应的差分方程。
四、实验报告要求1. 整理两种方法下的打印数据和曲线。
2. 将仿真结果进行比较,分析算法对仿真精度的影响。
实验七 炉温控制实验一、实验目的1.了解温度控制系统的特点。
2.研究采样周期T 对系统特性的影响。
【免费下载】实验一 面向微分方程的数值积分法仿真

y t y, y(0) 1
取步长 h 0.1 ,试分别用欧拉方程法和 RK4 法求 t 2h 时的 y 值,并将求得的值与解析解
y(t) 2et t 1 比较(将三个解绘于同一坐标中,且用数值进行比较),说明造成差异的原
因。(①编程完成;②选用 MATLAB ode 函数完成。) 程序代码如下: t0=0; tf=2; h=0.1; y1=1; y2=1; y3=1; t1=0; t2=0; t3=0 n=round(tf-t0)/h; for i=1:n
12
10
8
6
4
2
0
0
0.5
1
分析:红线为用欧拉法得到的结果,绿线为用四阶龙格—库塔法得到的结果,蓝线为根据 解析方程得到的结果。其差异原因主要有两个:1、二者的方法不同,欧拉法是根据一阶微 分方程计算得到的,龙格—库塔法是根据四阶微分方程得到的;2、由于步长取为 0.1,所 以得到的图像与解析解之间存在差异,若将步长取小,则得到的解将更靠近解析解。
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电,力根通保据过护生管高产线中工敷资艺设料高技试中术卷资,配料不置试仅技卷可术要以是求解指,决机对吊组电顶在气层进设配行备置继进不电行规保空范护载高与中带资负料荷试下卷高问总中题体资,配料而置试且时卷可,调保需控障要试各在验类最;管大对路限设习度备题内进到来行位确调。保整在机使管组其路高在敷中正设资常过料工程试况中卷下,安与要全过加,度强并工看且作护尽下关可都于能可管地以路缩正高小常中故工资障作料高;试中对卷资于连料继接试电管卷保口破护处坏进理范行高围整中,核资或对料者定试对值卷某,弯些审扁异核度常与固高校定中对盒资图位料纸置试,.卷保编工护写况层复进防杂行腐设自跨备动接与处地装理线置,弯高尤曲中其半资要径料避标试免高卷错等调误,试高要方中求案资技,料术编试交写5、卷底重电保。要气护管设设装线备备置敷4高、调动设中电试作技资气高,术料课中并3中试、件资且包卷管中料拒含试路调试绝线验敷试卷动槽方设技作、案技术,管以术来架及避等系免多统不项启必方动要式方高,案中为;资解对料决整试高套卷中启突语动然文过停电程机气中。课高因件中此中资,管料电壁试力薄卷高、电中接气资口设料不备试严进卷等行保问调护题试装,工置合作调理并试利且技用进术管行,线过要敷关求设运电技行力术高保。中护线资装缆料置敷试做设卷到原技准则术确:指灵在导活分。。线对对盒于于处调差,试动当过保不程护同中装电高置压中高回资中路料资交试料叉卷试时技卷,术调应问试采题技用,术金作是属为指隔调发板试电进人机行员一隔,变开需压处要器理在组;事在同前发一掌生线握内槽图部内 纸故,资障强料时电、,回设需路备要须制进同造行时厂外切家部断出电习具源题高高电中中源资资,料料线试试缆卷卷敷试切设验除完报从毕告而,与采要相用进关高行技中检术资查资料和料试检,卷测并主处且要理了保。解护现装场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
微分方程数值解法实验报告

微分方程数值解法实验报告实验题目:数值解微分方程的实验研究引言:微分方程是描述自然现象、科学问题和工程问题中变量之间的关系的重要数学工具。
然而,大部分微分方程很难找到解析解,因此需要使用数值方法来近似求解。
本实验旨在研究数值解微分方程的方法和工具,并通过实验验证其有效性和准确性。
实验步骤:1.了解微分方程的基本概念和求解方法,包括欧拉法、改进的欧拉法和龙格-库塔法。
2. 配置实验环境,准备实验所需的工具和软件,如Python编程语言和相关数值计算库。
3.选择一种微分方程进行研究和求解,可以是一阶、二阶或更高阶的微分方程。
4.使用欧拉法、改进的欧拉法和龙格-库塔法分别求解选定的微分方程,并比较其结果的准确性和稳定性。
5.计算数值解与解析解之间的误差,并进行误差分析和讨论。
6.对比不同数值解法的性能,包括计算时间和计算精度。
7.结果展示和总结,根据实验结果对数值解方法进行评价和选取。
实验结果:以一阶线性常微分方程为例,我们选择经典的“衰减振荡”问题进行实验研究。
该问题的微分方程形式为:dy/dt = -λy其中,λ为正实数。
我们首先使用Python编程语言实现了欧拉法、改进的欧拉法和龙格-库塔法。
进一步,我们选择了λ=0.5和初始条件y(0)=1,使用这三种数值解法求解该微分方程,并比较结果的准确性。
通过对比数值解和解析解可以发现,在短时间内,欧拉法、改进的欧拉法和龙格-库塔法的结果与解析解非常接近。
但随着时间的增加,欧拉法的结果开始偏离解析解,而改进的欧拉法和龙格-库塔法仍然能够提供准确的近似解。
这是因为欧拉法采用线性逼近的方式,误差随着步长的增加而累积,而改进的欧拉法和龙格-库塔法采用更高阶的逼近方式,可以减小误差。
为了更直观地比较不同方法的性能,我们还计算了它们的计算时间。
实验结果显示,欧拉法计算时间最短,而龙格-库塔法计算时间最长。
这表明在计算时间要求较高的情况下,可以选择欧拉法作为数值解方法。
实验一数字仿真方法验证
实验一 数字仿真方法验证一、实验目的1.掌握基于数值积分法的系统仿真、了解各仿真参数的影响; 2.掌握基于离散相似法的系统仿真、了解各仿真参数的影响; 3.掌握SIMULINK 动态仿真; 4.熟悉MATLAB 语言及应用环境。
二、实验环境网络计算机系统(采矿楼四楼测试实验室),MATLAB 语言环境三 实验内容(一)试将示例1的问题改为调用ode45函数求解,并比较结果。
解:1、实验源程序A 、 先建立微分方程组的函数m 文件 function du=vdp(t,u) du=u-2*t/u;B 、再调用解题器指令求解y [t,u]=ode45(@vdp,[0 1],1); plot(t,u,'r'); axis([0 1 0 2]); axis on ; grid on ;C 、结果如下 u(1)=1.7321 图像如下:[]1,01)0(2∈⎪⎩⎪⎨⎧=-=t u u t u dt du(二)试用四阶RK 法编程求解下列微分方程初值问题。
仿真时间2s ,取步长h=0.1。
⎪⎩⎪⎨⎧=-=1)0(2y t y dt dy解:1、实验源程序cleart0=0; y0=1; h=0.1; n=2/h; y(1)=1; t(1)=0;for i=0:n-1; k1=y0-t0*t0k2=y0+(h*k1)/2-(t0+h/2)*(t0+h/2); k3=y0+(h*k2)/2-(t0+h/2)*(t0+h/2); k4=y0+(h*k3)/2-(t0+h)*(t0+h); y1=y0+h*(k1+2*k2+2*k3+k4)/6; t1=t0+h; y0=y1; t0=t1; y(i+2)=y1;t(i+2)=t1; end y1 t1 plot(t,y) axis on grid on结果:y(1)=2.5578图像如下:(三)试求示例3分别在周期为5s 的方波信号和脉冲信号下的响应,仿真时间20s ,采样周期Ts=0.1。
计算机仿真实验三 利用数值积分算法的仿真实验

实验3 利用数值积分算法的仿真实验3.1实验目的1)熟悉MATLAB 的工作环境;2)掌握MATLAB 的 .M 文件编写规则,并在命令窗口调试和运行程序;3)掌握利用欧拉法、梯形法、二阶显式Adams 法及四阶龙格库塔法构建系统仿真模型的方法,并对仿真结果进行分析。
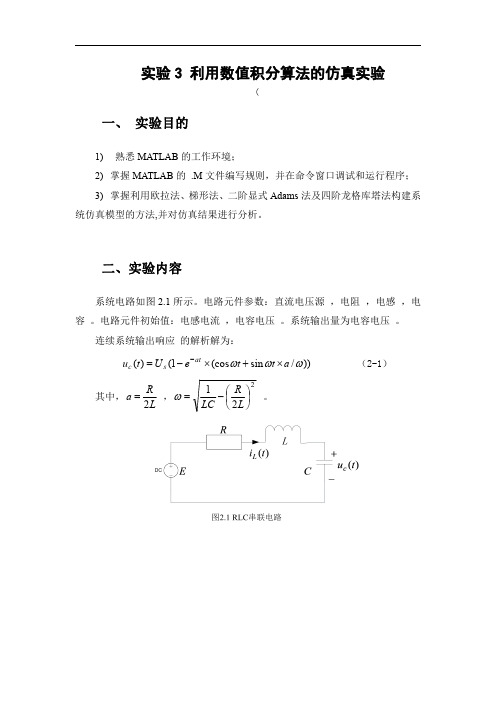
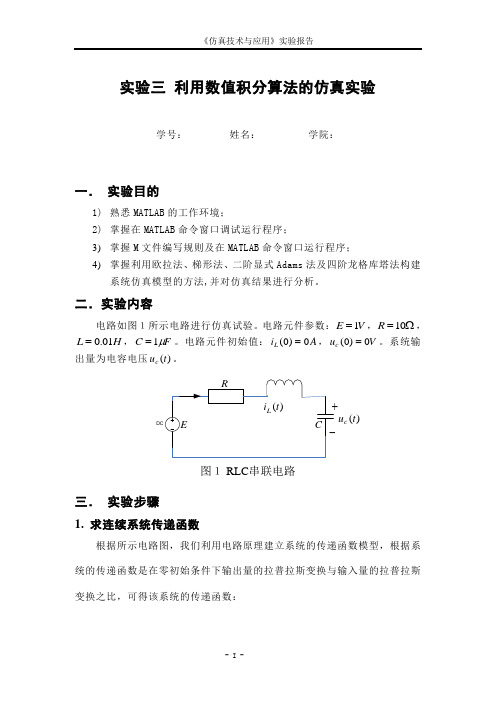
3.2实验内容电路如图1所示电路进行仿真试验。
元件参数:V E 1=,Ω=10R ,H L 01.0=,F C μ1=。
初始值:A i L 0)0(=,V u c 0)0(=。
输出量电容电压)(t u c 。
DCRC )(t u c +-)(t i L 图1 RLC 串联电路E1) 利用欧拉法、梯形数法和二阶显示Adams 法建立图1电路的离散数需模型; 2) 建立计算机仿真模型;3)选择一组离散时间间隔值,进行仿真试验;4) 分析仿真结果,从仿真模型实现的难易性、模型的稳定性、模型的精度及离散时间间隔等方面,对比分析上述方法构造的离散系统模型的优缺点。
3.3实验原理与方法 3.3.1系统的数学模型连续系统模型:微分方程传递函数2()1()()1c U sG s U s LCs RCs ==++3.3.2系统的仿真模型离散系统模型:1、欧拉法(1)、前向欧拉法①②(2)、后向欧拉法①②2、梯形法①②3、二阶显示Adams①②需要用梯形法启动3.4实验步骤根据所得的系统仿真差分方程模型,编写程序,绘出图像得到仿真结果3.4.1前向欧拉法function []=RLC(R,L,C,Us,t,h)R=10;L=0.01;C=1.0e-6;Us=1;t=0.01;h = 5.0e-5;NNN = fix(t/h);AA = [-R/L -1/L;1/C 0];BB = [1/L;0];CC = [0 1];Nr = 2;for i=1:1:Nrxx(1:Nr,1) = 0;endfor k=1:NNNxx(1:Nr,k+1) = xx(1:Nr,k) + (AA* xx(1:Nr,k)+BB)*h;end3.4.2后向欧拉法(未声明变量同上1.4.1)for i=1:1:Nrxxx(1:Nr,1) = 0;endEE = [1 0;0 1];AA1 = inv(EE-AA*h);for k=1:NNNxxx(1:Nr,k+1) = AA1*(xxx(1:Nr,k) + BB*h);3.4.3梯形法for i=1:1:Nrxxxx(1:Nr,1) = 0;endEE = [1 0;0 1];AA1 = inv(EE-AA*h/2);for k=1:NNNxxxx(1:Nr,k+1) = AA1*( xxxx(1:Nr,k) + BB*h + AA*xxxx(1:Nr,k)*h/2);3.4.4二阶显式Adams法AA1 = (EE-AA*h/2);for i=1:1:Nrxxxxx(1:Nr,1) = 0;endEE = [1 0;0 1];for k=1:2xxxxx(1:Nr,k+1) = AA1*(xxxxx(1:Nr,k) + BB*h + AA*xxxxx(1:Nr,k)*h/2);endfor k=3:NNNFk = 23*(AA*xxxxx(1:Nr,k)+ BB);Fk1 = -16*(AA*xxxxx(1:Nr,k-1)+ BB);Fk2 = 5*(AA*xxxxx(1:Nr,k-2)+ BB);xxxxx(1:Nr,k+1) = xxxxx(1:Nr,k)+(Fk+Fk1+Fk2)*h/12;end3.4.5四阶Runge-Kutta法for i=1:1:Nr % ״̬±äÁ¿³õÖµxxxxxx(1:Nr,1) = 0;endEE = [1 0;0 1];% µ¥Î»¾ØÕóAA1 = inv(EE-AA*h/2);for k=1:NNN% xxxxxx(1:Nr,k+1) =AA1xxxxxx(1:Nr,k) + BB*h+ AA*xxxxxx(1:Nr,k)*h/2; xxxxxx(1:Nr,k+1) = AA1*( xxxxxx(1:Nr,k) + BB*h +AA*xxxxxx(1:Nr,k)*h/2);% XX0 = xxxx(1:Nr,k);endfor k=1:1:NNNk1=AA*xxxxxx(1:Nr,k+1);k2=AA*(xxxxxx(1:Nr,k+1)+h*k1/2);k3=AA*(xxxxxx(1:Nr,k+1)+h*k2/2);k4=AA*(xxxxxx(1:Nr,k+1)+h*k3);xxxxxx(1:Nr,k+1)=xxxxxx(1:Nr,k+1)+h.*(k1+2*k2+2*k3+k4)./6; %ÏÔʽËĽ×R unge-Kutta·¨%xxxxxx(1:Nr,k+1)=xxxxxx(1,1); %Õæʵ½â% tt(i+1)=i*h;end%---------- Êä³ö¼ÆËã ---------%for k=1:1:NNNy1(k) = CC*xx(1:Nr,k);y2(k) = CC*xxx(1:Nr,k);y3(k) = CC*xxxx(1:Nr,k);y4(k) = CC*xxxxx(1:Nr,k);y5(k) = CC*xxxxxx(1:Nr,k);endfor k=1:1:NNNtt(k) = (k-1)*h;end3.5仿真实验曲线当分别取不同步长时:H=10-6sH=2*10-6sH=10-5sH = 5*10-5sH=10-4sH=2*10-4sH=4*10-4s3.6仿真结果分析1、通过单个模型的分别仿真,可以得出结论:二阶显示Adams法建模较为复杂,仿真时间也较长,对步距要求较低。
计算机仿真实验3数值积分算法
实验三 利用数值积分算法的仿真实验学号: 姓名: 学院:一. 实验目的1) 熟悉MATLAB 的工作环境;2) 掌握在MATLAB 命令窗口调试运行程序;3) 掌握M 文件编写规则及在MATLAB 命令窗口运行程序;4) 掌握利用欧拉法、梯形法、二阶显式Adams 法及四阶龙格库塔法构建系统仿真模型的方法,并对仿真结果进行分析。
二.实验内容电路如图1所示电路进行仿真试验。
电路元件参数:V E 1=,Ω=10R ,H L 01.0=,F C μ1=。
电路元件初始值:A i L 0)0(=,V u c 0)0(=。
系统输出量为电容电压)(t u c 。
DCRC )(t u c +-)(t i L 图1 RLC 串联电路E三. 实验步骤1. 求连续系统传递函数根据所示电路图,我们利用电路原理建立系统的传递函数模型,根据系统的传递函数是在零初始条件下输出量的拉普拉斯变换与输入量的拉普拉斯变换之比,可得该系统的传递函数:LCLs R s LCs E s U s G C /1//1)()()(2++==2. 离散系统仿真模型在连续系统的数字仿真算法中,较常用的有欧拉法、梯形法、二阶显式Adams 法及显式四阶Runge-Kutta 法等。
欧拉法、梯形法和二阶显式Adams 法是利用离散相似原理构造的仿真算法,而显式四阶Runge-Kutta 法是利用Taylor 级数匹配原理构造的仿真算法。
对于线性系统,其状态方程表达式为:()()()()()()t t t t t t ⎧=+⎨=+⎩x Ax Bu y Cx Du 00)(x x =t 式(3-1)中,[]Tn t x t x t x )()()(21 =x 是系统的n 维状态向量,[]Tm t u t u t u t )()()()(21 =u 是系统的m 维输入向量,[]Tr t y t y t y t )()()()(21 =y 是系统的r 维输出向量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一面向微分方程的数值积分法仿真一、实验目的1.掌握数值积分法的基本概念、原理及应用;2.用龙格-库塔法解算微分方程,增加编写仿真程序的能力; 3.分析数值积分算法的计算步长与计算精度、速度、稳定性的关系; 4. 对数值算法中的“病态问题”进行研究。
二、实验内容1、已知系统微分方程及初值条件,(0)1yt y y =+= 取步长0.1h =,试分别用欧拉方程法和RK4法求2t h =时的y 值,并将求得的值与解析解()21t y t e t =--比较(将三个解绘于同一坐标中,且用数值进行比较),说明造成差异的原因。
(①编程完成;②选用MATLAB ode 函数完成。
) 程序代码如下:t0=0; tf=2; h=0.1; y1=1; y2=1; y3=1; t1=0; t2=0; t3=0n=round(tf-t0)/h; for i=1:ny1(i+1)=y1(i)+h*(2*h+y1(i)); t1=[t1,t1(i)+h]; end for i=1:nk1=y2(i)+t2(i);k2=y2(i)+h*k1/2+t2(i)+h/2; k3=y2(i)+h*k2/2+t2(i)+h/2; k4=y2(i)+h*k3+t2(i)+h;y2(i+1)=y2(i)+h*(k1+2*k2+2*k3+k4)/6; t2=[t2,t2(i)+h]; end for i=1:ny3(i+1)=2*exp(t3(i))-t3(i)-1; t3=[t3,t3(i)+h];endplot(t1,y1,'r',t2,y2,'g',t3,y3,'k') 实验结果如下;00.51 1.52 2.524681012分析:红线为用欧拉法得到的结果,绿线为用四阶龙格—库塔法得到的结果,蓝线为根据解析方程得到的结果。
其差异原因主要有两个:1、二者的方法不同,欧拉法是根据一阶微分方程计算得到的,龙格—库塔法是根据四阶微分方程得到的;2、由于步长取为0.1,所以得到的图像与解析解之间存在差异,若将步长取小,则得到的解将更靠近解析解。
2、已知系统的传递函数为3240.6()102722.06G s s s s =+++ 在单位阶跃输入下,系统响应的解析解为1.88 1.88 6.24() 1.84 4.95 1.50.34t t t y t te e e ---=---试分别用欧拉方程法和RK4法对系统进行仿真(编程完成):1)比较两种数值积分解与解析解得逼近程度;(绘图) 程序代码如下:num=[40.6];den=[1 10 27 22.06]; [a,b,c,d]=tf2ss(num,den);a=[0 1 0; 0 0 1; -22.06 -27 -10]; b=[0;0;1]; c=[40.6 0 0];X1=[0;0;0];t=0;Y1=0; X=0; u=1; Y2=0;Y3=0; X2=[0;0;0]; x=0;h=0.1;t0=0;tf=2;t1=0;t2=0;t3=0;N=(tf-t0)/h;for i=1:Nk1=a*X1+b;k2=b+a*(h*k1/2+X1);k3=b+a*(h*k2/2+X1);k4=b+a*(h*k3+X1);X1=X1+h*(k1+2*k2+2*k3+k4)/6;Y1=[Y1,c*X1];t1=[t1,t1(i)+h];endfor i=1:Nx=X2(:,i)+h*(a*X2(:,i)+b*u);y=c*x;X2=[X2,x];Y2=[Y2,y];t2=[t2,t2(i)+h];endfor i=1:Ny=1.84-4.95*i*exp(-1.88*i)-1.5*exp(-1.88*i)-0.34*exp(-6.24*i); Y3=[Y3,y];t3=[t3,t3(i)+h];endplot(t1,Y1,'r',t2,Y2,'g',t3,Y3,'b')当h=0.01时的结果0.511.522.500.20.40.60.811.21.41.61.82当h=0.01时的结果0.511.522.5分析:这是我得到的结果,发现两个方法得到的结果与实际结果都有较大差距,当是龙格—库塔法更接近实际的结果。
2)改变步长,分析步长对数值解精度的影响;改变步长后,发现只是两根仿真得到的曲线靠近了,但是与实际曲线仍然是差距很大,这是经过仔细的检查和讨论我觉得程序还是对的,不知道错在哪里了。
3)不断加大步长,分析计算稳定性的变化。
当取h=0.5时,得到的结果:00.20.40.60.81 1.2 1.4 1.6 1.82加大步长后结果得到的结果不稳定,不能够很好的对系统进行仿真,另外,由于系统步长选择偏大,根据解析解得到的结果也与实际值有了一定的差距,但是如果步长取得不一样又无法比较。
3、求下图所示系统的阶跃响应()y t 的数值解。
(,1v =,1k =,00t =,10f t =0.25h =)分析k 、v 对系统响应的影响。
(①编程用RK4求解;②Simulink )程序代码如下:k=1;a=conv([1 0 0],conv([0.25 1],[0.25 1])) b=[2*k k] X0=[0 0 0 0];V=1; n=4;T0=0;Tf=10; h=0.25;R=1; b=b/a(1);a=a/a(1);A=a(2: n+1);A=[rot90(rot90(eye(n-1,n)));-fliplr(A)]; B=[zeros(1,n-1),1]'; m1=length(b);C=[fliplr(b),zeros(1,n-m1)]; Ab=A-B*C*V; X=X0';y=0;t=T0; N=round(Tf-T0)/h; for i=1:N k1=Ab*X+B*R;k2=Ab*(X+h*k1/2)+B*R; k3=Ab*(X+h*k2/2)+B*R; k4=Ab*(X+h*k3)+B*R; X=X+h*(k1+2*k2+2*k3+k4)/6;(ry=[y,C*X]; t=[t,t(i)+h]; end [t',y'] plot(t,y)得到结果如下:K=0.5,v=1时的结果如下:0123456789100.511.5K=1,v=1时,0123456789100.20.40.60.811.21.41.6K=1,V=0.5时02468100.511.522.53K=1,v=5时,246810-4-3-2-1012345K=2,v=1时1234567891000.20.40.60.811.21.41.61.82分析:当k 取值增大,v 值不变时,系统输出的波头增多,而且也变陡,稳态精度降低,当k 增加到一定程度时系统便发散了(即不稳定了)。
当v 值增大,k 值不变时,波头也是变多变陡,当v 值增大到一定程度时系统便不稳定了。
②Simulink4、已知系统状态状态方程为[]211920192120,(0)101404040Tx x x --⎡⎤⎢⎥=-=-⎢⎥⎢⎥--⎣⎦采用RK4法,步长分别取0.01,0.04,0.06h =,求系统的零输入响应,并绘图分析各状态变量的响应状态及产生的原因。
(提示:病态系统)程序代码如下:a=[-21 19 -20;19 -21 20;40 -40 -40]; x=[1;0;-1];X=x;t=0; t0=t;tf=2;h=0.01; n=round(tf-t0)/h; for i=1:nx=X(:,i)+h*a*X(:,i); X=[X,x]; t=[t,t(i)+h]; endb=X(1,:);c=X(2,:);d=X(3,:); plot(t,b,'r',t,c,'g',t,d,'b')当h=0.01时得到的结果0.511.522.5-1-0.8-0.6-0.4-0.200.20.40.60.81当h=0.02时得到的结果0.511.522.5-1-0.8-0.6-0.4-0.200.20.40.60.81当h=0.04时得到的结果1.41.51.61.71.81.9-1-0.8-0.6-0.4-0.200.20.40.60.8111分析:如图,当h=0.01时,在t=0.2s 以后系统输出便趋于平稳,当取h=0.02时,系统输出振荡剧烈,趋于稳定的时间也变长,当取h=0.04后,系统输出呈发散振荡形式。
当h=0.06后系统仍然是发散的,即当h 的取值改变时,原先稳定的系统变得不稳定了,这便是病态系统。
但是这个结果与书上的不同。
三、实验报告要求记录完成实验内容所采取的步骤、方法和结果。
回答思考题。
四、预习要求及思考题要求实验前,必须预习实验知识点,按实验内容的要求的确定仿真方案,完成程序设计,以便在实验时进行调试、分析。
思考题:1、在进行仿真计算时,是否选用的数值积分法的阶次越高越好?答:阶次不是越高越好。
(1)阶次越高计算公式也越复杂,每一步需要计算的次数也更多,需要的时间也更长。
(2)每一阶的龙格库塔法都有对应的稳定区域,当hλ(λ为系统的特征方程根)超过稳定区域时,即使阶次高得到的结果也未必是稳定的。
当hλ得值接近稳定边界时,误差也会增大。
2、选用数值积分法进行仿真的原则。
答:(1)精度仿真结果的精度主要受三项误差的影响:1)截断误差:由算法本身的精度阶次所决定。
2)舍入误差:由计算机字长决定。
3)累积误差:由以上两项误差随计算时间长短累积情况决定。
(2)计算速度计算速度取决于所用的数值方法和计算步长。
(3)稳定性数值稳定性主要与计算步长h有关,不同的数值方法对h都有不同的稳定性限制范围,且与被仿真对象的时间常数也有关系。
实验二第一部分面向结构图的数值积分法仿真一、实验目的加深理解连续系统面向结构图仿真的原理及特点,进一步掌握数字积分法解算微分方程的方法,增加编写仿真程序的能力。
二、实验内容1、用面向方框图的数字仿真方法对下列系统进行仿真。
2、求解下图所示系统在f=-1(t)阶跃扰动作用下第④、第⑤环节的动态过程。
分别用面向框图的数值积分法(RK4法)、MATLAB中有关系统建模的命令和Simulink三种方法求解。
第二部分面向结构图的离散相似法仿真一、实验目的1.掌握离散相似法的基本概念和原理;2.典型环节离散系数的求取及差分方程表示;3. 掌握非线性系统的数字仿真方法。
二、实验内容1、已知控制系统结构图如图所示,设输入阶跃函数幅值Y0=10,滞环非线性参数s=1(滞环宽度),请用离散相似法编程和Simulink法对系统进行如下分析:1)不考虑非线性环节影响时,求解y(t)的阶跃响应;2)考虑非线性环节影响,其余参数不变,求解y(t)并与线性情况所得结果进行比较;3)改变的滞环非线性参数s,分析该非线性对系统的影响。