PHQ-160型硬平衡机说明书
YYQ-16型技术说明 Word 文档

YYQ-16型硬支承圈带传动平衡机技术说明本机为标准机型(仅供参考,配MCB-280数显)一提供设备型号:YYQ-16型硬支承圈带平衡机壹台二技术参数及性能指标:圈带传动:1、工件质量范围 16kg2、最大工件外径φ300mm3、两支承间距离 60-520mm4、滚轮支承轴颈范围φ5mm~φ40mm5、圈带传动处直径范围φ15mm~φ150mm6、平衡转速(r/min)(工件直径在φ100mm时)570、12007、电动机功率 0.25KW8、最小可达剩余不平衡量≤0.3g.mm/kg9、不平衡量减少率URR ≥90%10、电测系统:MCB-280数字显示微机电测系统11、机器毛重(kg) 330三主要结构简介:圈带:驱动装置由电动机作主动力,经传动架的减速机构由皮带拖动工件旋转。
工件搁置在二支承摆架滚轮上,由于工件旋转时产生离心力,迫使摆架振动,此振动讯号通过装置在摆架内的机——电换能器(传感器),将振动信号转换成电信号,由专用的导线输入电测系统。
经过电测系统的解算从而显示出工件的不平衡量大小及相位。
为满足不同支承长度的工件,两摆架可根据支承距离在底座上进行调整。
两摆架上的滚轮架可以上下移动,以适应不同支承直径的要求。
本设备属于硬支承通用平衡机,采用H型支承架。
支承架刚度大,恢复性好。
四、电测系统功能介绍:MCB-280数字显示微机立柜式电测系统数字显示,能显示工件的不平衡量、角度及转速。
测量数据采用全数字化处理,操作简单,维修方便,可靠性高,相位和数值显示准确。
在显示的角度上进行加重(或去重)至平衡精度要求则视合格。
本机灵敏度高,操作简单,有很高的平衡效率。
五、主要配置:1主机部分:底座、左右摆架各一套QT500-7(含安全架两套、档头两套),滚轮支承装置1套,传动架壹套(配主电机、皮带传动轮),光电传感器及立杆壹套。
2 电测系统:MCB-280数字显示立柜电测系统六本设备生产及验收执行的标准:GB/T4201—2006通用卧式平衡机校验法GB/T3181—1995 漆膜颜色标准符合国家通用机电设备生产标准。
YYQ-160硬支撑动平衡试验机方案

YYQ-160硬支撑动平衡试验机方案1.产品特点:我公司生产的通用硬支承动平衡机严格按照G B 4 2 0 1- 8 4组织生产,均采用滚轮支承,有万向联轴节驱动、圈带拖动等,均采用屏显式结构,工业控制计算机进行数据处理,彩色屏幕显示:不平衡量和相位角及实时转速。
软件采用我公司2000年自主研发的RYW-2001动平衡机专用软件,操作简单,使用方便。
具有效率高,精度准确,显示直观,质量可靠,维修方便的特点。
可实现实时参数输入,预览,试验、结果存储、打印、操作全部菜单结构,人机对话,自动提示。
3.软件功能介绍:A.转子档案编辑及数据存储功能,可存储100个工件的系统标定参数。
B.“普通工件”标定功能,随时修正平衡机误差。
C.可进行单、双面测量。
D.可选配打印机,即时打印。
E.软件具有系统测试功能,测试传感器的信号稳定性。
F.可显示加去重状态,用键盘的加、减号可以直接切换。
G..具有夹具补偿功能,可以消除工装本身不平衡量及定位造成的间隙误差。
4. YYQ-160A配置:平衡机主机一台(2米床身);标准滚轮架一套;工业控制计算机一套;17吋液晶显示器一台;工业控制机柜一套;产品地脚螺栓和调整楔铁及随机工具一套平衡机软件和技术手册一套压电传感器一套;光电传感器一套YYQ-160标准型图片如下:5.机械部分特点:1.平衡机床身采用HT200整体铸造,导轨面经大型龙门铣床一次加工成形,然后在导轨磨床上进行磨削。
2.摆架采用球墨铸铁QT400整体铸造,配合面磨削加工。
3.平衡机上的滚轮采用的材料是GCr15轴承钢,经通体淬火,硬度达到了HRC55以上,且表面加工成R400的弧度,使其与工件的接触是宽线接触。
4.滚轮轴承采用小沟曲率P5级C2组精密轴承。
提高了滚轮的使用精度和使用寿命。
6.电器部分特点:1.测量部分采用研祥工业计算机主板,配17寸液晶显示器。
2.动平衡机专用软件是我公司2000年设计使用的,已经多次升级,操作全部用汉化菜单。
动平衡机PHWQ-1000说明书
动平衡机PHWQ-1000说明书PHWQ-1000测量系统是一个由单片机为核心,加上信号过滤放大处理电路组成的系统,主要用于平衡及测量和计算的智能化仪器,显示方式可以采用大屏液晶,也可采用小屏液晶,或者用显示器均可。
人机对话为全中文菜单,不仅操作简单、直观、方便,而且测量工件不平衡量的精度高,因此,PHWQ-1000测量系统是您理想的选择。
动平衡机PHWQ-1000通过主轴带动需要平衡的工件旋转,工件不平衡量在旋转过程中产生离心力,该力作用在平衡机的摆架上,引起振动,振动通过传感器变成电信号,经过滤波及程控放大后,送到模数转换电路,计算机读到信号的幅值和相位,根据影响系数法原理计算出工件不平衡量,最后通过显示器显示出来。
按键功能介绍电测箱接通电源后,显示器上直接显示测量界面,按“功能”键可进入系统操作菜单。
各按键功能如下:“复位”键,---程序将重新启动,如果要中途取消数据输入或修改,可以按“复位”键退出“功能”键,-进入主菜单“A”和“V”键,---子菜单上移一项或着下移一项,用来选择菜单项“确认”键,---完成数据输入“取消”键,---取消当前数据修改数字键和“.”键,---用来输入各参数的数据各菜单功能和参数介绍主菜单1、自检测量(1000),---电路自检以判断电路是否正常2、(根据参数不同,有3种功能)3、夹具补偿设置,---测量夹具补偿的数据4、测量参数设置,---设置测量需要的参数5、显示参数设置,---设置与显示相关的参数6、数据组号保存退出,--进入保存参数子菜单7、动平衡标定,---进入动平衡标定子菜单8、最高转速=xxxxRPMXXX23,---显示测量板的电路参数9、参数打印(XXX),---如果配置有微型打印机可以打印参数。
MS-015 动力均衡试验机作业基准书
4.8:按执行键,机器显示R1=XXXX,输入数字“实际尺寸”(转子轴心到左加重点中心的距离)
4.9:按执行键,机器显示R2=XXXX,输入数字“实际尺寸”(转子轴心到右加重点中心的距离)
4.10按执行键,机器显示SP=XXXX,输入指点的数字(转数XX转/分钟)
3.工艺要求
3.1;严格遵守本基准书要求作业。
3.2:转子放入平衡机应轻拿放好,不可碰伤转子及心轴表面
3.3:转子平衡加重垫片应铆接牢固。
3.4:平衡柱铆接后应呈半圆弧形,且不得歪斜。
3.5:工件平衡后应堆放在专用的工位器具上,摆放整齐,防止碰伤和划伤。
3.6:做好设备日常维护保养,保持设备完好。
4.工艺过程
核准
审核
制订
苏州良机电机有限公司
文件分类
名称
编号
MS-015
页数
1-1
操作说明书
动力均衡试验机作业基准书
版本
A-1
制定日期
2006-03-01
修订日期
1.适应范围:本基准书适应HQ-50型硬平衡机。50公斤以内转子适应
2.准备操作
2.1:准备好气锤、半平键、平衡垫片、反光标签。
2.2:准备所需检测的转子。
2.3:检查机器各部件是否完好。转动是否正常。确认机器正常后方可打开机器电源开关。
4.4:接通电源开关,机器进入自检过程,一切正常后,面板显示Bal—20H按执行键。机器显示:NO=X,输入数字“1”NO=0。
4.5:按执行键,机器显示A=XXXX,输入数字“实际尺寸”(左面支撑点到左面加重点的距离)
4.6:按执行键,机器显示B=XXXX,输入数字“实际尺寸”(左面加重点到右面加重点的距离)
轮胎平衡机使用说明

DYNAMAX 5021輪胎平衡機使用說明一、控制面板各部名稱1 內側配重公克數值/鋼圈直徑2 外側配重公克數值/鋼圈寬幅3 內側配重位置燈號4 外側配重位置燈號5 平衡OK燈號6 至鋼圈邊緣距離7 兩面用嵌入式配重模式8 內側嵌入式,外測黏貼式模式9 內外側均用黏貼式模式10靜平衡使用黏貼式模式(機車)11小卡車輪圈使用模式12鋼圈直徑輸入選擇鍵13鋼圈寬幅輸入選擇鍵14鋼圈邊緣距離輸入選擇鍵15測試模式選擇鍵16數值增加鍵17數值減少鍵18特殊按鍵19軸心鎖定鍵20設定鍵21緊急停止鍵22啟動鍵二、輪胎固定使用倒錐式固定1.先裝入彈簧2.裝入錐套3.鋼圈掛於錐套上4.裝上鋼圈罩蓋5.裝入襯套6.固定旋轉螺帽使用前錐式固定1.掛上鋼圈2.裝入錐套3.裝入襯套4.固定旋轉螺帽三、選擇測試模式一般選擇兩面用嵌入式配重模式(此模式單位為英吋)四、輸入各項數據◆設定至鋼圈邊緣距離拉出距離量尺頂到測量點,停留一秒,會有嗶嗶音號,並自動輸入,如未拉到定點而停頓一秒,則輸入錯誤,請推回量尺重拉,量測完須將量尺推回,否則會出現E-E錯誤訊息。
◆設定鋼圈寬幅1.使用寬幅量尺測量尺寸2.按鍵13後以鍵16及17使數字相符3.按鍵20設定◆設定至鋼圈直徑1.按鍵12後以鍵16及17使數字相符2.按鍵20設定註:因顯示窗1及2為兩種數值共用,切換方式如下:在指示直徑與寬幅情況下,按鍵14再按鍵20,變為配重表示狀態。
在配重表示狀態情況下,按鍵12或13再按鍵20,變為指示直徑與寬幅。
五、測試蓋上蓋子後,連續輕押起動鍵22兩次,輪胎玄轉8秒後停止,顯示出配重數及位置。
六、嵌入配重以手沿燈號方向回轉輪胎,至配重數字閃爍及嗶生響起,此時12點鐘方向即為不平衡位置。
按下鎖定鍵19,軸心會鎖住10秒,以便打入配重。
七、確認結果蓋上蓋子後,連續輕押起動鍵22兩次,若平衡完成則OK燈號會亮起。
Schunk PGN plus 160 双指平行夹紧机与配套组件说明书

Application examplePlacement unit for medium-weight components1 2 3 4 SlePneumatic drive with Cylinder Piston rodsSizes 25 .. 50Weight3.4 kg .. 14.6 kg Driving force 259 N .. 1,135 N Stroke40 mm .. 250 mm Payload to 60 kg1234Stroke moduleArea of applicationYour advantages and benefits General information about the seriesGuideBall bushings on steel shaftsMaterialAluminum, hard-anodizedDriveCylinder piston rods (choice of 25, 32, and 50 mm) Actuationusing filtered compressed air (10 μm): dry and oiled Ambient temperature range 5 °C to 60 °C Operating pressure range2 bar to 8 bar Stroke lengths40, 80, 125, 160, 200 and 250 mm with end position fine adjustment (longer strokes on request)Useful loadsto 60 kgScope of deliveryIncludes cylinder, proximity switch and hydraulic shock absorbersOptionClamping element, e.g. for vertical useWarranty24 monthsWith pneumatic drive and ball bushing guideSimple economical linear movements or, in combination, also as multi-axis positioning systems for assembly and handling technologyStable ball bushing guidefor maximum positioning accuracy and moment loads Powerful cyclinder piston rodsras a strong and economical drive solutionOpen design conceptoffers ideal accessibility for sensor systems, hydraulic shock absorbers, and end position fine adjustmentWide range of mounting and attachment options for universal use and multi-axis arrangementsSlePneumatic drive with Cylinder Piston rods For production reasons, the colors may vary from those shown in the catalog. The stroke module is powered by a standard cylinder piston rod and guided with protection against over rotation by two opposite guide rods.description of functionSizes 32 and 50 are also available with a pneumatic rod lock.options and special informationSectional diagram of function123 4 5 6 Pneumatic drive with Cylinder Piston rodsSle123456FittingsAccessoriesP lease see the side views at the end of the respective size for information concerning specific sizes, availability, designation, and ID numbers. You can find more informa-tion about our accessories range in the “Accessories” section of the catalog.Connection cable for proximity switchSDV--P pressure mainte-nance valveInductive proximityswitch Pneumatic drive with Cylinder Piston rodsSleV sensor distributortechnical dataSle 25Moment loadDesignationSLE 25-40SLE 25-80SLE 25-125SLE 25-160SLE 25-200ID no.03319000331901033190203319030331904Piston diameter [mm]2525252525Stroke length [mm] 40 80125160200Overall length[mm]290330375410450Feeding force [F V ] at 6 bar [N]259259259259259Retraction force [F R ] at 6 bar [N]216216216216216Max. moment load M y [Nm] 90 80 60 45 33Max. moment load M z [Nm]100100100100100Weight[kg]3.4 3.6 3.7 3.8 3.95Pneumatic cylinderBosch MNI Bosch MNI Bosch MNI Bosch MNI Bosch MNI Hydraulic end position dampersACE MC 150 MACE MC 150 MACE MC 150 MACE MC 150 MACE MC 150 MS troke lengths with cylinder tolerance ± 1.5 mmPneumatic drive with Cylinder Piston rodstype of load m 1type of load m 2S pecific values for individual stroke variations can be found in the technical data table.m 1 Max. 15 kgUnit secured at end platesm 2 Max. 10 kgUnit secured at base bodyMain viewsSle 251 Unit connection2 Assembly connection Sensor plug projectionHydraulic shock absorber projectionUseful strokeCylinder projection with unit extended E nd position adjustmentper side +1 mm, –9 mmCylinder projection / stroke increments Attachment of inductive proximity switchesPneumatic drive with Cylinder Piston rodsSLE L [mm]H [mm]U [mm]25 - 4029040025 - 8033080025 - 1253751252425 - 1604101605925 - 20045020099DesignationID no.IN-B 80/S-M12 PNP (closer)0301479(two included in scope of delivery)connection cable ID no.KA BW12-L 3P-0300-PNP0301503Length 3 m with right-angle plugtechnical dataSle 32Moment loadDesignation SLE 32-80SLE 32-125SLE 32-160SLE 32-200SLE 32-250Without rod lock ID no.03319050331906033190703319080331909With rod lock ID no.03319200331921033192203319230331924Piston diameter [mm]3232323232Stroke length [mm]80125160200250Overall length[mm]380425460500550Feeding force [F V ] at 6 bar [N]422422422422422Retraction force [F R ] at 6 bar [N]364364364364364Max. moment load M y [Nm]140130 95 70 50Max. moment load M z [Nm]140140140140140Weight with rod lock [kg] 5.1 5.3 5.5 5.7 6.2Weight without rod lock [kg]4.85.0 5.2 5.4 5.9Pneumatic cylinderBosch PRA Bosch PRA Bosch PRA Bosch PRA Bosch PRA Hydraulic end position dampersACE MC 225 MACE MC 225 MACE MC 225 MACE MC 225 MACE MC 225 MS troke lengths with cylinder tolerance ± 1.5 mmPneumatic drive with Cylinder Piston rodstype of load m 1type of load m 2S pecific values for individual stroke variations can be found in the technical data table.m 1 Max. 25 kgUnit secured at end platesm 2 Max. 16 kgUnit secured at base bodyMain viewsSle 321 Unit connection2 Assembly connectionSensor plug projectionHydraulic shock absorber projection With optional clamping element Air connection thread M5Useful strokeCylinder projection with unit extendedC ylinder projection with unit extended withclamping elementE nd position adjustment per side+2 mm, -21 mmCylinder projection / stroke increments Attachment of inductive proximity switchesPneumatic drive with Cylinder Piston rodsSLE L [mm]H [mm]U1 [mm]U2 [mm]32 - 8038000032 - 12542512526032 - 16046016015.263.232 - 20050020055.2103.232 - 250550250105.2153.2DesignationID no.IN-B 80/S-M12 PNP (closer)0301479(two included in scope of delivery)connection cable ID no.KA BW12-L 3P-0300-PNP0301503Length 3 m with right-angle plugtechnical dataSle 50Moment loadDesignation SLE 50-80SLE 50-125SLE 50-160SLE 50-200SLE 50-250Without rod lock ID no.03319100331911033191203319130331914With rod lock ID no.03319250331926033192703319280331929Piston diameter [mm]5050505050Stroke length [mm] 80125160200250Overall length[mm]470515550590640Feeding force [F V ] at 6 bar [N]11351135113511351135Retraction force [F R ] at 6 bar [N]871871871871871Max. moment load M y [Nm]300300230170130Max. moment load M z [Nm]300300300300300Weight with rod lock [kg]12.713.213.714.114.6Weight without rod lock [kg]12.312.813.313.714.2Pneumatic cylinderBosch PRA Bosch PRA Bosch PRA Bosch PRA Bosch PRA Hydraulic end position dampersACE MC 600 MACE MC 600 MACE MC 600 MACE MC 600 MACE MC 600 MS troke lengths with cylinder tolerance ± 1.5 mmPneumatic drive with Cylinder Piston rodstype of load m 1type of load m 2S pecific values for individual stroke variations can be found in the technical data table.m 1 Max. 60 kgUnit secured at end platesm 2 Max. 40 kgUnit secured at base bodyMain viewsSle 501 Unit connection2 Assembly connectionSensor plug projectionHydraulic shock absorber projection With optional clamping element Air connection thread G⅛"Useful strokeCylinder projection with unit extendedC ylinder projection with unit extended withclamping elementE nd position adjustment per side+2 mm, -21 mmCylinder projection / stroke increments Attachment of inductive proximity switchesPneumatic drive with Cylinder Piston rodsSLE L [mm]H [mm]U1 [mm]U2 [mm]50 - 80470800050 - 12551512526050 - 16055016028050 - 20059020068050 - 25064025048118DesignationID no.IN-B 80/S-M12 PNP (closer)0301479(two included in scope of delivery)connection cable ID no.KA BW12-L 3P-0300-PNP0301503Length 3 m with right-angle plug。
平衡机-平衡仪使用说明书第六页
电脑车轮平衡仪
7.2 重新计算不平衡值
同上操作输入新的轮辋数据,无需旋转轮胎,按<5g 键新的不平衡值立刻显示在屏幕上。
7.3 实际不平衡值显示
标准平衡块从5g 开始,以5g 为单位往上递增因此剩余不平衡最多可达4g ,这使不平衡仍有残留,并导致跳动,平衡操作时电脑会选择一个最合适的平衡块,根据平衡块所处位置及不平衡值,按<5g 键。
7.4 静态-动态平衡方式
以下功能适用于加平衡块位置不同于正常加平衡块位置的平衡方式。
按F 或SEL 键,选择需要的功能,按加平衡块位置参照平衡块位置指
示灯选择正确的平衡方式。
正常:在轮辋两边夹平衡块方式平衡钢制或铝合金轮
辋。
ALU1:在轮辋边缘胶粘平衡块。
ALU2:在轮辋两边缘胶粘平衡块,内侧隐蔽式胶粘平
衡块。
ALU3:轮辋内侧夹平衡块内侧,隐蔽式胶粘平衡块。
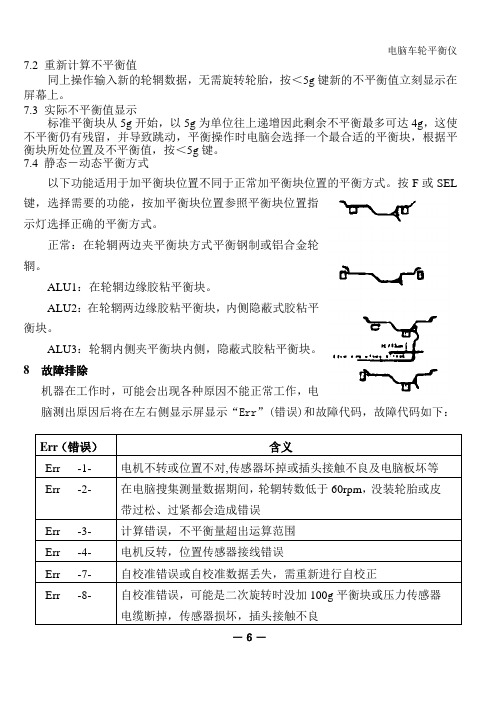
8 故障排除
机器在工作时,可能会出现各种原因不能正常工作,电
脑测出原因后将在左右侧显示屏显示“Err ”(错误)和故障代码,故障代码如下: -6-。
动力平衡机器公司60 Hz垂直中心力泵系列说明书
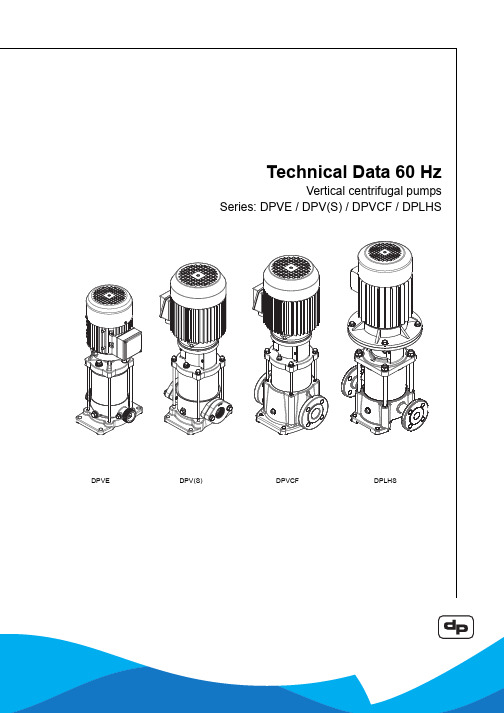
Table of Contents1Pump introduction1.1General (4)1.2Model key (4)1.3Description of the product (5)1.4Operation (5)1.5Working range (5)2Performance characteristics2.1Performance curve details (7)2.2Performance with variable frequency drive (8)2.3Performance characteristics DPVE 2-pole 60 Hz (9)2.4Performance characteristics DPV(S)(F) 2-pole 60 Hz (9)2.5Performance characteristics DPV(S)(F) 4-pole 60 Hz (10)2.6Performance characteristics DPVCF 2-pole 60 Hz (10)3Technical specifications3.1Dimensions and weights DPVE 2 60 Hz (12)3.2Hydraulic performance DPVE 2 60 Hz ª3500 1/min (13)3.3Dimensions and weights DPVE 4 60 Hz (14)3.4Hydraulic performance DPVE 4 60 Hz ª3500 1/min (15)3.5Dimensions and weights DPV(S) 2 60 Hz (16)3.6Hydraulic performance DPV(S) 2 60 Hz ª3500 1/min (17)3.7Dimensions and weights DPV(S) 4 60 Hz (18)3.8Hydraulic performance DPV(S) 4 60 Hz ª3500 1/min (19)3.9Dimensions and weights DPV(S) 10 60 Hz (20)3.10Hydraulic performance DPV(S) 10 60 Hz ª3500 1/min (21)3.11Dimensions and weights DPV(S) 14 60 Hz (22)3.12Hydraulic performance DPV(S) 14 60 Hz ª1750 1/min (23)3.13Dimensions and weights DPV(S) 18 60 Hz (24)3.14Hydraulic performance DPV(S) 18 60 Hz ª3500 1/min (25)3.15Dimensions and weights DPV(S)F 24 60 Hz (26)3.16Hydraulic performance DPV(S)F 24 60 Hz ª1750 1/min (27)3.17Dimensions and weights DPV(S)F 32 60 Hz (28)3.18Hydraulic performance DPV(S)F 32 60 Hz ª3500 1/min (29)3.19Dimensions and weights DPV(S)F 45 60 Hz (30)3.20Hydraulic performance DPV(S)F 45 60 Hz ª3500 1/min (31)3.21Dimensions and weights DPV(S)F 65 60 Hz (32)3.22Hydraulic performance DPV(S)F 65 60 Hz ª3500 1/min (33)3.23Dimensions and weights DPLHS 6 60 Hz (34)233.24Hydraulic performance DPLHS 6 60 Hz ª3500 1/min..........................................................................353.25Dimensions and weights DPVCF 2 60 Hz ...........................................................................................363.26Hydraulic performance DPVCF 2 60 Hz ª3500 1/min..........................................................................373.27Dimensions and weights DPVCF 4 60 Hz ...........................................................................................383.28Hydraulic performance DPVCF 4 60 Hz ª3500 1/min..........................................................................393.29Dimensions and weights DPVCF 10 60 Hz .........................................................................................403.30Hydraulic performance DPVCF 10 60 Hz ª3500 1/min........................................................................413.31Dimensions and weights DPVCF 18 60 Hz .........................................................................................423.32Hydraulic performance DPVCF 18 60 Hz ª3500 1/min........................................................................433.33Dimensions and weights DPVCF 32 60 Hz .........................................................................................443.34Hydraulic performance DPVCF 32 60 Hz ª3500 1/min........................................................................453.35Dimensions and weights DPVCF 45 60 Hz .........................................................................................463.36Hydraulic performance DPVCF 45 60 Hz ª3500 1/min........................................................................473.37Dimensions and weights DPVCF 65 60 Hz .........................................................................................483.38Hydraulic performance DPVCF 65 60 Hz ª3500 1/min (49)4Materials4.1Overview of materials ..........................................................................................................................504.2Materials conversion............................................................................................................................504.3Mechanical seal specifications (51)5Connections5.1Suction and discharge connections (standard G and DIN)..................................................................525.2Suction and discharge connections (optional ASME)..........................................................................535.3Suction and discharge connections (optional Rc and JIS) (54)6Factory options6.1Factory options (55)7Accessories7.1Horizontal mounting kit ........................................................................................................................567.2Thrust bearing housing (57)8Sectional drawings8.1Parts list...............................................................................................................................................588.2Sectional drawing DPVE 2/4................................................................................................................598.3Sectional drawing DPV(S) 2/4/10/14/18..............................................................................................608.4Sectional drawing DPV(S)F 24/32.......................................................................................................618.5Sectional drawing DPV(S)F 24/32 with cartridge seal.........................................................................628.6Sectional drawing DPV(S)F 45............................................................................................................638.7Sectional drawing DPV(S)F 45 with cartridge seal..............................................................................648.8Sectional drawing DPV(S)F 65............................................................................................................658.9Sectional drawing DPLHS 6.................................................................................................................668.10Sectional drawing DPVCF 2/4/10/18...................................................................................................678.11Sectional drawing DPVCF 32..............................................................................................................688.12Sectional drawing DPVCF 32 with cartridge seal ................................................................................698.13Sectional drawing DPVCF 45..............................................................................................................708.14Sectional drawing DPVCF 45 with cartridge seal ................................................................................718.15Sectional drawing DPVCF 65 (72)41Pump introduction1.1GeneralThe vertical, multi-stage centrifugal pumps DPVE, DPV(S), DPVCF and DPLHS are produced by DP-Pumps. 1.2Model key24265-B DPVE DPV(S)DPVCFDPLHSPump type DPVS F45-50-1Materials DPV DP Vertical pumps in AISI 304 (1.4301).DPVE DP Vertical pumps in AISI 304 (1.4301). Male thread with built-in non-return valve on discharge side.DPVS DP Vertical pump in superior grade AISI 316 (1.4401).DPLHS DP Vertical pump in superior grade AISI 316 (1.4401) 40 Bar.DPVCF DP Vertical pump with cast-iron pumpcasing for heavy duty applications. Pump connections Oval counterflanges with female thread (DPLHS round flanges)F Round flanges DIN, JIS or ASME.V Victaulic connection.Model / flow45Pump model indicates nominal flow in [m3/h].Stages / head-50Indicates number of impeller stages (50 = 5).Half stage impeller-1Fitted with a half stage impeller (only DPV(S)F 4556Table 1: Specification of the working rangeMinimum volume flows (Q) in % of Q optimumtemperatures (t).Table 2: Minimum volume flows (Q min)Table 3: Specific applicationsPump typeDPVEDPVDPVF/VDPVSDPVSF/VDPVCFDPLHSAmbienttempera-ture [°C]+4 to 40Liquid tem-perature[°C]-15to 60-15 to 1001ing the factory option “o-ring sealing EPDM E425”the max. temp. limit is 120°C.-15 to 12022.When pumping water, the max. allowable liquid temp is80°C.-15to120-15to8033.Higher temperatures are possible at lower pressure.For specific limits consult your supplier.Maximumworkingpressure[bar]1044.The total of the supply pressure and no-load deliverypressure with closed outlet shut-off valve may notexceed the maximum working pressure.164254164254254404Allowablesize ofsolidspumped5µ to 1mmMinimumsupplypressureNot cavitating5.5.Contact your supplier for more detailed advice.Viscosityliquid [cSt]1A higher viscosity may require more motorpower.5Density liq-uid [kg/m3]1000A higher density may require more motorpower.5Cooling The space above the cooling fan of the motormust at least be equal to 1/4 of the diameterof the inlet of the cooling fan of the motor inorder to have a sufficient supply of air.Number ofstartsRelated to the motor66.For standard motors see the technical specifications.When the pump is fitted with another motor brand,please consult the motor supplier.Minimumfrequency[Hz]10Maximumfrequency[Hz]6077.Pumps that are intended for 50 Hz operation, may notbe connected to 60 Hz.DP50 Hz60 HzQ min in m3/h20,30,340,60,6560,80,8101,21,4141,01,1182,42,4242,22,6324,04,0454,65,1656,16,1type application areaDPV(Drinking) water supply systems, irrigationsystems, water treatment systems, car-wash systems, sprinkler systems.DPVS Water-supply systems for drinking water,softened and demineralised water, systemsfor brackish water, sea water and swim-ming-pool water, however limited withrespect to temperature, pressure and chlo-rine percentage.DPVCF Systems for boiler supply and discharge ofcondensed waterDPLHS Reverse osmosis installations and highpressure cleaning systems.DPVE(Drinking) water supply systems.40506070809010010515202530Q[%]72Performance characteristics2.1Performance curve detailsThe preceding diagrams give a global overview of all the pump models mentioned in this documentation. Detailed characteristics are given for each model showing the hydraulic efficiency, NPSH req , and shaft power as well.The performance of the pump depends on thenumber of stages. The number of stages are shown as a multiple of 10, as per example:The detailed performance curves are in accordance with ISO 9906 Annex A. Vibration limits at rated speed and rated flow are according to ISO 9905.The motors used for the measurements are standard DP. When using another motor brand theperformance data, like Q/H, efficiency and shaft power must be corrected accordingly.The characteristics given are based on:•Deaerated water at a temperature of 20 °C •Density of 1,0 kg/dm 3•Kinematical viscosity of 1 mm 2/s (1 cst)To prevent the pump from overheating, gathering gas, cavitations etc. a minimum flow has to be secured.The minimum flow corresponds to a percentage of the optimum flow Q opt in relation to the temperature of the liquid pumped.DPV 10-60 6 full stage impellersDPVF 45-50-15 full stage impellers and 1 half stage impeller2.2Performance with variablefrequency driveThe minimum frequency of the DP motor should be limited to 10 Hz to ensure sufficient cooling. When the rotational speed exceeds the nominal speed of the motor, make sure that the power output of the motor is suitable to drive the corresponding pump model.The converted frequency from an average variable frequency drive will have a rather high pulse rise time, which creates heat in the winding. To be suitable for this kind of application, the DP motors are built in accordance with IEC 60034-17.2575/1142589102.5Performance characteristics DPV(S)(F) 4-pole 60 Hz2.6Performance characteristics DPVCF 2-pole 60 Hz281/7626n=17501/min 51020304050100US.gpm0.30.40.51234510l/sH285/264273Technical specifications11123.1Dimensions and weights DPVE 2 60 HzDPVE 295000714DPVE 2 60 Hz GeneralM o d e lP [k W ]P [H P ]E 1 [m m ]E 2 [m m ]F 1 [m m ]N e t w e i g h t [k g ]2- 100,370.5134107413132- 200,37 0.5134107413132- 300,550.75134107458152- 400,7511501154701820020512-C13143.3Dimensions and weights DPVE 4 60 Hz95000715DPVE 4 60 Hz GeneralModelP [k W ]P [H P ]E 1 [m m ]E 2 [m m ]F 1 [m m ]N e t w e i g h t [k g ]4- 100,370.5134107413134- 200,55 0.75134107437154- 300,751150115449184- 401,11.51501155002020020514-C15163.5Dimensions and weights DPV(S) 2 60 HzDPV(S) 2DPV(S)V 295000714DPV(S)F 2DPV(S)(V)(F) 2 60 Hz GeneralDPV(S)DPV(S)VDPV(S)FM o d e lP [k W ]P [H P ]E 1 [m m ]E 2 [m m ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]2- 100,370.51341074512321345123213476257142- 200,370.51341074512321345123213476257142- 300,550.751341074962531649625316521278162- 400,7511501155182841951828419543309202- 501,1 1.51501155693052156930521594330212- 601,1 1.51501155903262159032621615351222- 701,521761366323572563235725657382262- 801,521761366533782665337826678403262- 901,521761366743992667439926699424272- 1002,231761366954203069542030720445302- 1102,23176136x x x 71644130741466312- 1302,23176136x x x 75848331783508322- 150********x x x 85153542876560432- 16034194147x x x 87255643897581432- 18045233162xxx922598529476235396000823-K173.7Dimensions and weightsDPV(S) 4 60 HzDPV(S) 4DPV(S)V 495715DPV(S)F 4DPV(S)(V)(F) 4 60 Hz General DPV(S)DPV(S)V DPV(S)FModelP[kW]P[HP]E1[mm]1E2[mm]F1[mm]F2[mm]Netweight[kg]F1[mm]F2[mm]Netweight[kg]F1[mm]F2[mm]Netweight[kg] 4- 100,370.51341074512321345123213476257154- 200,550.751341074752321547523215500257174- 300,7511501154972631949726319522288204- 401,1 1.51501155482842054828420573309224- 501,521761365903152459031524615340264- 601,521761366113362561133625636361264- 702,231761366323572863235728657382304- 802,231761366533782965337829678403304- 90341941477254093972540939750434414- 100341941477464304074643040771455414-11034194147x x x76745140792476424-130********x x x81749350842518524-150********x x x85953551884560534-1605,57.5233162x x x885556589105815996000824-M1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm, 30-37 kW = 400 mm18193.9Dimensions and weightsDPV(S) 10 60 HzDPV(S) 10DPV(S)V 1097191DPV(S)F 10DPV(S)(V)(F) 10 60 Hz General DPV(S)DPV(S)V DPV(S)FModelP[kW]P[HP]E1[mm]1E2[mm]F1[mm]F2[mm]Netweight[kg]Netweight[kg]Netweight[kg] 10- 100,75115011555632223232610- 201,5217613660733228283110- 302,2317613663435932323510- 403419414771239643434510- 503419414773942343434610- 604523316277445053535610- 705,57.523316282649760606310- 805,57.523316285352461616310- 1007,510233162935578x666910- 1207,510233162989632x677010- 14011153152061218716x13513897000795-H1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm, 30-37 kW = 400 mm202122DPV(S) 14 60 HzDPV(S) 1497000192DPV(S)(V) 14 60 Hz GeneralM o d e lP [k W ]P [H P ]E 1 [m m ]1E 2 [m m ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]14- 200,550.751501155563222214- 401,1 1.51761366663862914- 601,521761367204403314- 802,231941478205044414- 100341941478745584714- 120452331629366125714- 140452331629906665814- 1605,57.526617911237409314- 1805,57.526617911777949414- 2007,510266179126984810797000796-I1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm, 30-37 kW = 400 mm2324DPV(S) 18 60 HzDPV(S)F 18DPV(S) 1897000193DPV(S)(V)(F) 18 60 Hz GeneralDPV(S)DPV(S)VDPV(S)FModelP [k W ]P [H P ]E 1 [m m ]1E 2 [m m ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]18- 102,2317613662234732632357326323573618- 204523316268135751691367516913675518- 305,57.523316274041158750421587504216218- 407,51023316280344663813456638134566718- 507,51023316283748064847490648474906818- 60111531520610475451311057555131105755513518- 70111531520610815791321091589132109158913618- 8015203152061116614x 1126624146112662415118- 9015203152061150648x 1160658147116065815218- 10018,5253152061229683x 1239693163123969316818- 12018,5253152061298752x1308762165130876217097000797-J1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm, 30-37 kW = 400 mm2526DPV(S)F 24 60 HzDPV(S)F 24200125 DPV(S)F 24 60 Hz GeneralModelP[kW]P[HP]E1[mm]1E2[mm]F1[mm]F2[mm]Netweight[kg]24- 101,1 1.51761367384585724- 201,521761367865066224- 302,231941478715557224- 40341941479196037624- 50452331629766528624- 605,57.5266179110372012224- 705,57.5266179115276912424- 807,510266179123881713824- 907,510266179128786614024- 1007,510266179133591414224- 1107,510266179138496314524- 12011153122301553111619524- 160152031223017871310216 20000570-E1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm,30-37 kW = 400 mm2728DPV(S)F 32 60 HzDPV(S)F 3220010205DPV(S)F 32 60 Hz GeneralM o d e lP [k W ]P [H P ]E 1 [m m ]1E 2 [m m ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]32- 10341941477744587032- 207,5102331628835269132- 301115315206118268016332- 401520315206123072817932- 501520315206127977718132- 6018,525315206137182519832- 702230350225146987423732- 803040398323157292230832- 903040398323162197131420000601-J1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm, 30-37 kW = 400 mm2930DPV(S)F 45 60 HzDPV(S)F 4520010207DPV(S)F 45 60 Hz GeneralM o d e lP [k W ]P [H P ]E 1 [m m ]1E 2 [m m ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]45- 10-1341941477744587145- 105,57.52331628074788645- 20-11115315206113363116145- 201115315206113363116145- 30-11520315206118268017845- 3018,525315206122668019345- 40-12230350225132372823145- 403040398323137872830445- 50-13040398323142777730645- 503040398323142777730645- 60-13750398323147582532345- 603750398323147582532320000632-I1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm, 30-37 kW = 400 mm31DPV(S)F 65 60 Hz99000287-I1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm,30-37 kW = 400 mm323334DPLHS 6 60 HzDPLHS 694001301DPLHS 6 60 Hz GeneralM o d e lP [k W ]P [H P ]E 1 [m m ]1E 2 [m m ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]6- 807,510233162896539966- 100111531520611316291656- 120111531520611906881686- 1401520315206125074818595000687-F1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm, 30-37 kW = 400 mm3536DPVCF 2 60 HzDPVCF 220050498DPVCF 2 60 Hz GeneralM o d e lP [k W ]P [H P ]E 1 [m m ]E 2 [m m ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]2- 400,751150115543309252- 501,1 1.5150115594330272- 601,1 1.5150115615351272- 701,52176136657382312- 801,52176136678403322- 901,52176136699424322- 1002,23176136720445362- 1102,23176136741466362- 1302,23176136783508372- 15034194147876560482- 16034194147897581482- 180452331629476235896000823-K3738DPVCF 4 60 HzDPVCF 420050499DPVCF 4 60 Hz GeneralM o d e lP [k W ]P [H P ]E 1 [m m ]1E 2 [m m ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]4- 401,1 1.5150115573309284- 501,52176136615340324- 601,52176136636361324- 702,23176136657382364- 802,23176136678403364- 9034194147750434474- 10034194147771455474- 11034194147792476484- 13045233162842518584- 15045233162884560594- 1605,57.52331629105816096000824-M1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm, 30-37 kW = 400 mm3940DPVCF 10 60 HzDPVCF 102005050DPVCF 10 60 Hz GeneralM o d e lP [k W ]P [H P ]E 1 [m m ]1E 2 [m m ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]10- 40341941477123965310- 50341941477394235410- 60452331627744506310- 705,57.52331628264977010- 805,57.52331628535247110- 1007,5102331629355787610- 1207,5102331629896327710- 1401115315206121871614597000795-H1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm, 30-37 kW = 400 mm41423.31Dimensions and weights DPVCF 18 60 HzDPVCF 1820050501DPVCF 18 60 Hz GeneralM o d e lP [k W ]P [H P ]E 1 [m m ]1E 2 [m m ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]18- 407,5102331628134567718- 507,5102331628474907818- 601115315206105755514518- 701115315206109158914618- 801520315206112662416118- 901520315206116065816218- 10018,525315206123969317718- 12018,525315206130876217997000797-J1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm, 30-37 kW = 400 mm43443.33Dimensions and weights DPVCF 32 60 Hz20070258-ADPVCF 32 60 Hz GeneralM o d e lP [k W ]P [H P ]E 1 [m m ]1E 2 [m m ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]32- 207,5102331628835269732- 301115315206118268016832- 401520315206123072818432- 501520315206127977718732- 6018,525315206137182520432- 702230350225146987424232- 803040398323157292231332- 903040398323162197132020000601-J1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm, 30-37 kW = 400 mm45463.35Dimensions and weights DPVCF 45 60 Hz20070259-ADPVCF 45 60 Hz GeneralM o d e lP [k W ]P [H P ]E 1 [m m ]1E 2 [m m ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]45- 20-11115315206113363116945- 201115315206113363116945- 30-11520315206118268018645- 3018,525315206122668020145- 40-12230350225132372823945- 403040398323137872831245- 50-13040398323142777731445- 503040398323142777731445- 60-13750398323147582533145- 603750398323147582533120000632-I1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm, 30-37 kW = 400 mm47483.37Dimensions and weights DPVCF 65 60 Hz20010103DPVCF 65 60 Hz GeneralM o d e lP [k W ]P [H P ]E 1 [m m ]1E 2 [m m ]F 1 [m m ]F 2 [m m ]N e t w e i g h t [k g ]65- 105,57.52331629946659865- 201115315206128678417265- 301520315206137587318965- 4018,525315206150896220765- 5022303502251646105124799000287-I1.Diameter adapter flange 5,5-7,5 kW = 300 mm, 11-22 kW = 350 mm, 30-37 kW = 400 mm494Materials4.1Overview of materialsPos. nr.Description DPVE DPV DPVS DPVCF DPLHS101Pump casing 1.4308 1.4301 1.4404JL 1040 1.4408108Stage casing 1.4301 1.4404 1.4301 1.4404160Cover 1.4301 1.4404 1.4301 1.4404171Diffuser- 1.4404 1.4301-10-6Pump shroud 1.4301 1.4404 1.4301 1.4404210Shaft 1.4305 1.4401 1.4305 1.4401230Impeller 1.4301 1.4404 1.4301 1.4404341Motor stool JL 1040 1.4408412O-ring EPDM Viton EPDM E425Viton525Spacer sleeve 1.4301 1.4401 1.4301 1.4404529Bearing sleeve-Tungsten-carbide1)Bearing-Ceramic890Base plate JL 1040-905Tie bolt 1.4057920Nut 1.4301 1.4404 1.4301 1.4404932Circlip 1.45711.The bearing has no pos.nr. because it is a fixed part of the stage casing (108) or diffuser (171)4.2Materials conversionMaterial Description Code and material nr.Standard ASTM / AISI1JL 1040Cast iron GJL-250EN 1561A48:40B1.4301Chromium-nickel steel X5CrNi18-10EN 10088A276:3041.4404Chromium-nickel-molybdenum steel X2CrNiMo 17-12-2EN 10088A276:316L1.4408Chromium-nickel-molybdenum cast steel GX5CrNiMo 19-11-2EN 10213A743CF8M1.4571Chromium-nickel-molybdenum steel X6CrNiMoTi17-12-2EN 10088A276:316Ti1.4057Chromium-nickel steel X17CrNi16-2--QT800EN 10088-3A276:4311.4305Chromium-nickel steel X8CrNiS 18-9EN 10088A276:3031.4401Chromium-nickel-molybdenum steel X5CrNiMo 17-12-2EN 10088A276:3161.4308Chromium-nickel cast steel GX5CrNi 19-10EN 10283A743:CF81.Note: The indication of the material designations to ASTM / AISI is not binding50。
上海剑平动平衡机PHWQ-1000说明书
上海剑平动平衡机PHWQ-1000说明书
动平衡机的定标步骤:
1、打开定标对话框,输入试重的重量0.5g和角度0度,要是左右校正应该同时输入。
2、按左面输入的重量和角度在槽筒的左校正面上0°处加上0.5g橡皮泥,右校正面上不加重,单击定标测量按钮。
3、开车启动槽筒,等待锁定按钮变为绿色,开锁开始测量,测量时间完成后,锁定关车停槽筒。
4、按右面输入的重量和角度在槽筒的右校正面上0°处加上0.5g橡皮泥,左校正面不加重,单击定标测量按钮。
5、开车启动槽筒,等锁定按钮变为绿色,开锁开始测量,测量时间完成后,锁定关车停槽筒。
6、左右校正面均不加试重,单击定标测量按钮。
7、开车启动槽筒,等锁定按钮变为绿色,开锁开始测量,测量时间完成后,锁定关车停槽筒。
8、单击定标完成按钮,定标过程结束。
上海剑平动平衡机的使用说明书
上海剑平动平衡机的使用说明书摘要:一、引言二、产品简介1.产品名称与型号2.产品用途与特点三、安装与调试1.安装步骤2.调试方法四、操作指南1.操作步骤2.功能说明3.注意事项五、维护与保养1.维护周期与内容2.保养方法3.故障处理六、安全与环保1.安全措施2.环保要求七、售后服务与技术支持八、结论正文:一、引言随着工业技术的不断发展,动平衡机在各类机械设备中的应用越来越广泛。
上海剑平动平衡机作为一款高品质的动平衡设备,为广大用户提供了一站式的平衡解决方案。
本文将详细介绍上海剑平动平衡机的使用方法,帮助用户更快、更好地掌握产品性能,确保机械设备的安全运行。
二、产品简介1.产品名称与型号本文介绍的动平衡机产品名为上海剑平动平衡机,型号分别为:XP系列、GP系列、EP系列等。
2.产品用途与特点上海剑平动平衡机主要用于检测和调整旋转机械零部件的平衡,如电机、风机、汽轮机等。
产品具有以下特点:(1)高精度:采用先进的测量技术,平衡精度更高;(2)高效率:采用高效的传动系统,提高生产效率;(3)智能化:配置先进的控制系统,实现自动化操作;(4)人性化:设计合理,操作简便,降低用户劳动强度。
三、安装与调试1.安装步骤(1)清理安装现场,确保地面平整、无尘;(2)按照图纸进行设备定位,设置基准线;(3)将动平衡机主体、测头、控制器等部件就位;(4)连接电源、气源、传感器等,确保连接可靠;(5)安装完成后,进行接地处理。
2.调试方法(1)开启电源,检查设备运行是否正常;(2)使用标准砝码进行精度测试,调整至满足精度要求;(3)对测头、控制器等关键部件进行调试,确保功能正常;(4)进行空载试验,检查设备运行是否平稳。
四、操作指南1.操作步骤(1)开启电源,启动控制器;(2)选择测量模式,如自动平衡、手动平衡等;(3)将待测零部件放置于测头之上,紧固;(4)根据提示进行操作,如输入零部件参数、调整平衡参数等;(5)平衡完成后,取出零部件,进行后续加工。
平衡机-平衡仪使用说明书第四页
电脑车轮平衡仪3.3 不平衡方式转换
TH→动平衡→静平衡
功能键→S方式→平衡方式1→平衡方式2 →平衡方式3
4 安装轮胎
4.1 安装主轴丝杆
安装主轴丝杆时用工业酒精或汽油将接触面上的防锈油擦干净,以免影响安装精度,在随机附件箱内有一根主轴丝杆,对准主轴上安装孔,一定要拧紧否则会影响重复测量精度。
4.2 安装轮胎
4.2.1 先装轮胎,选择与轮辋匹配的锥度盘套在主轴上,锥度盘小头朝内。
4.2.2 装好后用快速螺母锁紧。
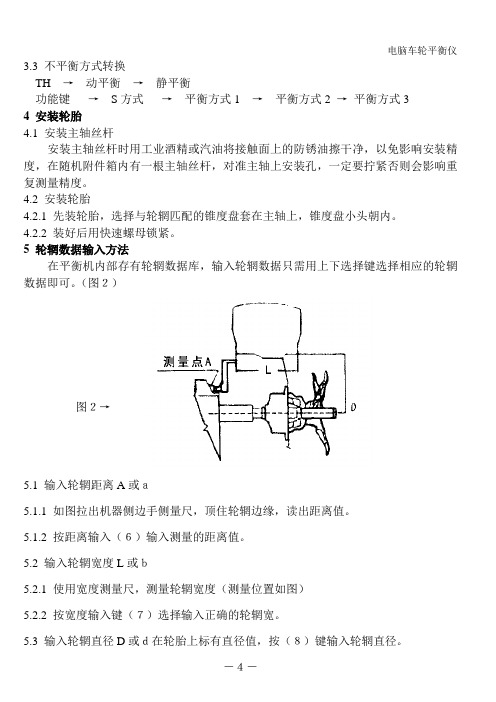
5 轮辋数据输入方法
在平衡机内部存有轮辋数据库,输入轮辋数据只需用上下选择键选择相应的轮辋数据即可。
(图2)
图2→
5.1 输入轮辋距离A或a
5.1.1 如图拉出机器侧边手侧量尺,顶住轮辋边缘,读出距离值。
5.1.2 按距离输入(6)输入测量的距离值。
5.2 输入轮辋宽度L或b
5.2.1 使用宽度测量尺,测量轮辋宽度(测量位置如图)
5.2.2 按宽度输入键(7)选择输入正确的轮辋宽。
5.3 输入轮辋直径D或d在轮胎上标有直径值,按(8)键输入轮辋直径。
-4-。
一种160kg卧式动平衡机的设计及应用
(1)要有较高的灵敏度; (2)输出信号要跟输入信号成正比,误差要小于 5%; (3)参数要能够稳定; (4)速度传感器转速范围必须要有较好的频率响应, 因而所选用的传感器的弹性系统的固有频率比它的工作频 率低很多; (5)对于卧式或立式双面平衡机,它的两个电磁式传感 器的性能要保证基本一致,线圈的直流电阻误差不大于 10%。 本 设 计 平 衡 机 为 双 校 正 面 机, 采 用 的 是 压 电 式 传 感 器 和 光 电 式 传 感 器。 振 动 传 感 器 选 用 的 是 CS-YD-022 压 电 传 感 器, 其 静 态 指 标 为 灵 敏 度 20mV/mm/s, 频 率 范 围 4 ~ 2000Hz。本研究平衡机在测量转速时选用 KJT-FJ12ZNK 光电传感器。 2.3 电气测量系统 平衡机工作时,工件在平衡机架上被拖动旋转后,作 用于支承上不平衡离心力,迫使支承做强迫振动。安装在左、 右两个支承架上的传感器受力或振动而产生信号,产生两 路包含不平衡信息的电信号输出。同时,安装在工件附近 的相位基准传感器产生与转子同频的基准信号。该信号作 为相位参考信号,同频跟踪控制信号和测速信号。 电测箱接收的三路信号,经过前置处理、跟踪滤波、 幅度调整、信号处理、分离解算,最后算出左、右两校正 平面上的不平衡量和所在位置(角度),并由数码管显示。 它的电气原理如图 2 所示。
在确定平衡机设计方案时,不仅要考虑平衡机的用途、 工作效率、先进性、经济指标,还要考虑待平衡转子的类型、 特征、重量范围、校正面的个数、许用不平衡量的大小、平 衡转速范围以及不平衡量的校正方式。本设计基于系统工程 理论,利用系统优化方法,平衡质量 8 ~ 160kg 的各类转子, 如中小型电动机、风机、水泵、增压器、空调机等设备的转子。
PHQ-16转子动平衡操作规程

4.16.12按“执行”键1次,进入等待检测界面;
4.16.13按启动按钮,设备运行,待转速问道后,系统开始测量,待机器报警,显停指示灯闪烁后停机,稍等片刻,屏幕显示:CAL=A00界面,取下加在右面的加重块;
4.7按“执行”键1次,进入转子B尺寸参数设置界面,用卡尺测量转子左面加重或去重面的长度,并按数字键输入转子B尺寸;
4.8按“执行”键1次,进入转子C尺寸参数设置界面,用卡尺测量右面摆架的支撑点到转子右面加重或去重面的长度,并按数字键输入转子C尺寸;
4.9按“执行”键1次,进入转子左面校正半径r1尺寸参数设置界面,用卡尺测量转子左面加重或去重面的半径,并按数字键输入转子左面校正半径r1尺寸;
4.16.2接通平衡机电源,进入开机界面;
4.16.3按“标定”键1次,再按(0)键两次,进入标定程序的转速设置界面;
4.16.4按数字键输入转子在平衡机上的测量转速;
4.16.5按“执行”键1次,进入精度显示界面BP,按数字键1-3,输入所需要的显示精度BP,(选1可以显示到0.1、选2可以显示到0.01、选3可以显示到0.001),按被测试转子要求选择;
4.16.14按“执行”键1次,进入等待运行界面,按启动按钮,开机设备运行,稍等片刻,平衡仪显示屏幕自动复位到开机界面;
4.16.15标定结束。
5注意事项
5.1标定用的转子必须做好防锈、பைடு நூலகம்尘;
5.2在平衡机运行前,支撑架必须固定牢固,避免震动大造成数据不准;
5.3设备运行时,工作人员不可站在设备正前方或用手去触摸设备运行部位,以防危险伤害;
4.15取下转子,用固定工装固定在台钻上,用台钻在记号笔标记处钻孔去重,去重后清理铝屑,然后再次测试动平衡量是否合格,如不合格再重复去重直到合格为止。
PHQ-160型硬平衡机说明书
JP PHQ-160型硬支承平衡机产品说明书上海剑平动平衡机制造有限公司感谢您使用上海剑平动平衡机制造有限公司的产品。
在使用本产品之前,请注意仔细阅读本说明书及有关附属说明书,并请注意下列事项:1.开箱验收:产品开箱验收时若发现产品、附件与装箱单不符,请来函与本公司联系。
2.安装使用:对使用说明书有关安装、环境、操作、调整等事项应事先了解清楚,避免造成事故。
在正常运输、安装、使用和保养条件下如发现产品制造质量问题,在规定期限内请与本厂联系。
3.安全事项:产品电器电压、电流、防护和报警等安全措施尤须注意。
4.在安装和使用过程中,如对本平衡机有什么要求,意见和建议,请与本厂咨询服务部门联系,我们将热忱地回答并解决你们生产使用中发生的一切问题。
谢谢!公司网址公司电话:+86-21-39971327公司传真:+86-21-39972165公司地址:上海市沪太路7488弄111号邮编:201809E-mail:**************目录一.平衡机的用途及适用范围二.平衡机的工作条件三.技术参数及主要技术性能指标四.主要结构概述五.硬支承平衡机的原理六.平衡机的吊运与安装七.操作与使用八.维护与保养九.故障与排除十.平衡词汇十一.平衡精度及精度计算附表. 典型刚性转子的平衡精度等级平衡机外型图支承架结构图传动系统结构图一.平衡机的用途与适用范围随着现代工业的发展。
消除机器的振动问题已日趋重要。
对于旋转机械(如电动机、鼓风机、柴油机、汽车等等)其旋转部件将直接影响到机器的效率,寿命和人身的安全。
因此平衡工艺被看成是绝对必要的。
本平衡机就是专门为旋转工件的平衡而设计生产的专用设备。
本平衡机是属于硬支承平衡机产品之一。
转子的支承采用H型支承架,具有支承刚度高、恢复力强、稳定性好的特点,机电转换器采用压力传感器,其特点是输入量较大、体积小、便于安装。
电测系统采用JP-380微机测试系统,转速、量值、相位全部用数字显示,转子的6种类型可任选,显示直观,并能记忆显示量,不平衡量直接以“g”显示。
平衡机-平衡仪使用说明书第五页
电脑车轮平衡仪6 平衡机使用前自校准程序:
※注意:设备初始安装或使用过程中,怀疑测量不准时都应运行自校准程序以确保平衡机测量准确。
打开机器上电源开关,例如装上尺寸(13”~15”)轮胎。
输入轮辋数据,同时按下校正键和启动键。
显示:(CAL)(CAL)直到不平衡位置指示灯全亮并停止闪动,松开按键,按启动键,机器开始转动、停止后,屏幕显示(ADD)(100).
显示:(ADD)(100)在轮辋外侧加100g平衡块,按启动键,主轴再次旋转,停止后显示(End)(CAL)
显示:(End)(CAL)自校准结束后,自校准数据存储在存储器中即使关机数据也不会丢失,此后无需调整可直接做轮胎平衡操作。
7 车轮平衡操作:
7.1小汽车及中小型卡车轮胎平衡
打开电源开关,装上待平衡轮胎。
输入轮辋数据,按START键,轮胎转动,停止后左侧显示屏显示轮胎内侧不平衡值,右侧显示轮胎外侧不平衡值。
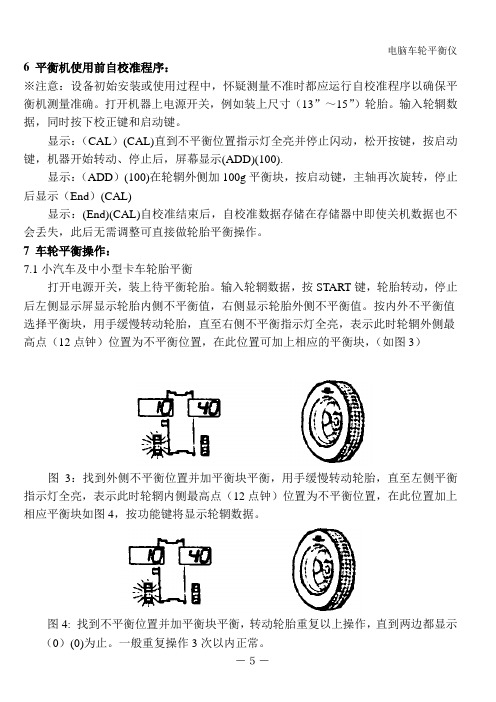
按内外不平衡值选择平衡块,用手缓慢转动轮胎,直至右侧不平衡指示灯全亮,表示此时轮辋外侧最高点(12点钟)位置为不平衡位置,在此位置可加上相应的平衡块,(如图3)
图3:找到外侧不平衡位置并加平衡块平衡,用手缓慢转动轮胎,直至左侧平衡指示灯全亮,表示此时轮辋内侧最高点(12点钟)位置为不平衡位置,在此位置加上相应平衡块如图4,按功能键将显示轮辋数据。
(0)(0)为止。
一般重复操作3次以内正常。
YYH-160型动平衡机校准的研究
维普资讯
团
需要而定。只有这样才能既满足外形尺寸的一致性, 又
计 与 试 术26 第3 第2 量 测 技 )o年 3卷 1期 0
根据国家标准 G 0-8<  ̄2 1 4 通用卧式平衡机校验法》 中校验项 目的要求, 主要是对动平衡机的最小可达剩余不
上安装己知的试重 。
平衡机具有效率高、 操作 简便 、 显示直观等特点 , 有很宽
的平衡范围。它与 D Z 0 T 30型通用平衡机指示器共 同组
成动平衡机测试系统 , 原理框图如图 l 所示 。
为了保证测量校准精度 , 标准校验转子校正平 面的 确定一般应遵循以下原则 :
() 1 校正平面和转子或标 准校验转子 的转动轴线必
平衡量和不平衡量减少率这两项技术指标进行校准。 3 1 最小可达剩余不平衡量的校准 . 3 11 将校验转子平衡到剩余不平衡量小于 5。 .. e;
能满足重量基本相近, 而且与实际产品相 比降低 了加工 难度, 精度也更容易保证。
3 12 在校验转子的两个非试验平面上 , .. 同时分别加上
用寿命 , 以及更平稳 、 更安全、 满负载运行的关键。
l Y H6 Y 10型动平衡机的结构与工作原理 11 Y H 6 . Y 10型动平衡机采用硬支承机械结构 , 因此该
10 r ( ) 00 m;3 最小可达剩余不平衡量 (0 :.5 m / a e)0 4 g・ m k ;4 不平衡减小率( R ) ≥9 % 。 g( ) UR : O 2 标准校验转子的设计和选择 2 1 校准校验转子是为检验动平衡机而设 计 的适 当质 . 量的刚性转子或挠性转子 , 这种转子 已平衡 到足 以能用 加重方法引入准确 的不平衡量 , 其量值和相角位置具有 高度的重复性 。只要标准转子本身 的残余不平衡量足够 小( 为完全平衡 的转 子) 试 验平面几何尺寸 测量准确 , , 试重和转子的误差足够小 , 就等 于用一 己知 的不平衡量 测量动平衡机的示值 。 22 标准校验转子 的加工非常 困难 。标 准校验转 子必 . 需严格轴对称。为了减少转子支承处到校正平面的几何 尺寸的变化 , 提高校准精度 , 标准校验转子的形状必须和 被平衡的旋转零部件形状 一致 , 并且可 以在 固定出来的。旋转 部分( 以下简称为转子 ) 是旋转机械 的核心部件。转子
如何选配平衡机
如何选配平衡机一.名词解释:1、转子(工件)剩余不平衡量,代号Uper---转子经平衡后,允许剩余的不平衡量,单位:g.mm 。
2、平衡机最小可达剩余不平衡量,代号Umar---平衡机用标准校验转子进行校验时,平衡机可测量到的最小不平衡量,单位:g.mm 。
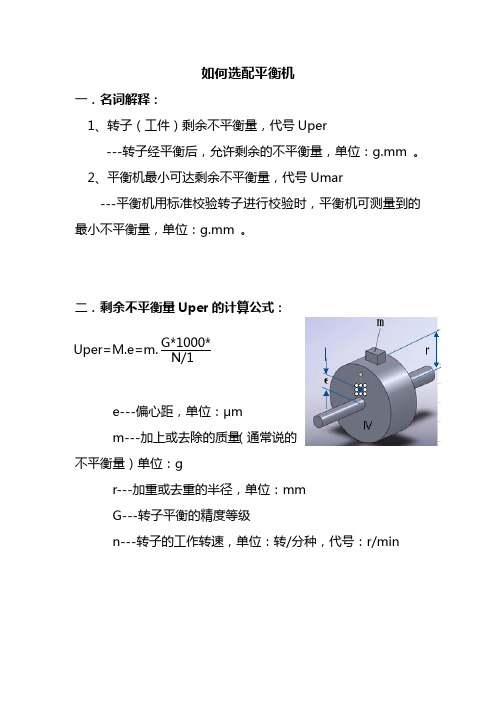
二.剩余不平衡量Uper 的计算公式:e---偏心距,单位:μm m---加上或去除的质量(通常说的不平衡量)单位:gr---加重或去重的半径,单位:mm G---转子平衡的精度等级n---转子的工作转速,单位:转/分种,代号:r/minUper=M.e=m.r=G*1000*MN/10三.平衡机的选择步骤:1、根据转子是需要双面校正还是单面校正来粗选平衡机。
一般当转子需校验处的长度与直径之比≥5时,选择双面平衡机;反之,则选择单面平衡机。
2、如果已确定转子需做双面平衡,则再根据转子的最大直径,最大长度及重量来进一步确定平衡机,如果转子需单面校正,则应根据转子的重量,直径来选择单面功能的平衡机,有时可用双面平衡机。
3、用转子的剩余不平衡量Uper与平衡机的最小可达不平衡量Umar作比较。
a)当Uper>Umar时,平衡机选择正确。
转子的Uper值可根据前面的计算公式算出,没有转子的Uper值就无法正确选择平衡机。
b)当最小Umar>Uper时,说明现有的通用平衡机不能满足此种转子的平衡要求,需要重新设计或改制成特殊的平衡机,有时转子的支承方式特殊也需改制平衡机。
四.附各种平衡机的最小可达剩余不平衡量Umar表:单位 g.Mm圈带传动平衡机型号Umar 型号Umar 型号UmarPHQ-1.6 0.15 PHQ-160 25 PHQ-1600 250PHQ-5 0.48 PHQ-300 50 PHQ-3000 500PHQ-16 1.5 PHQ-500 80 PHQ-5000 1600PHQ-50 8 PHQ-1000 150 PHQ-7500 2500万向节传动平衡机型号Umar 型号Umar 型号UmarPHW-50 16 PHW-1000 300 PHW-7500 2500PHW-160 50 PHW-1600 500 PHW-10000 3000PHW-300 100 PHW-3000 1000 PHW-20000 6000PHW-500 160 PHW-5000 1600单面立式平衡机型号Umar 型号UmarPHD-3.5 5.5 PHD-65 100PHD-16 17.5 PHD-100 175PHD-42 55备注:具双面平衡能力的平衡机行标注的最小可达不平衡量Umar值是指左右两面值的总和,如果此机用于校正单面的转子,则其Umar值应除以2。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
JP PHQ-160型硬支承平衡机产品说明书上海剑平动平衡机制造有限公司感谢您使用上海剑平动平衡机制造有限公司的产品。
在使用本产品之前,请注意仔细阅读本说明书及有关附属说明书,并请注意下列事项:1.开箱验收:产品开箱验收时若发现产品、附件与装箱单不符,请来函与本公司联系。
2.安装使用:对使用说明书有关安装、环境、操作、调整等事项应事先了解清楚,避免造成事故。
在正常运输、安装、使用和保养条件下如发现产品制造质量问题,在规定期限内请与本厂联系。
3.安全事项:产品电器电压、电流、防护和报警等安全措施尤须注意。
4.在安装和使用过程中,如对本平衡机有什么要求,意见和建议,请与本厂咨询服务部门联系,我们将热忱地回答并解决你们生产使用中发生的一切问题。
谢谢!公司网址公司电话:+86-21-39971327公司传真:+86-21-39972165公司地址:上海市沪太路7488弄111号邮编:201809E-mail:**************目录一.平衡机的用途及适用范围二.平衡机的工作条件三.技术参数及主要技术性能指标四.主要结构概述五.硬支承平衡机的原理六.平衡机的吊运与安装七.操作与使用八.维护与保养九.故障与排除十.平衡词汇十一.平衡精度及精度计算附表. 典型刚性转子的平衡精度等级平衡机外型图支承架结构图传动系统结构图一.平衡机的用途与适用范围随着现代工业的发展。
消除机器的振动问题已日趋重要。
对于旋转机械(如电动机、鼓风机、柴油机、汽车等等)其旋转部件将直接影响到机器的效率,寿命和人身的安全。
因此平衡工艺被看成是绝对必要的。
本平衡机就是专门为旋转工件的平衡而设计生产的专用设备。
本平衡机是属于硬支承平衡机产品之一。
转子的支承采用H型支承架,具有支承刚度高、恢复力强、稳定性好的特点,机电转换器采用压力传感器,其特点是输入量较大、体积小、便于安装。
电测系统采用JP-380微机测试系统,转速、量值、相位全部用数字显示,转子的6种类型可任选,显示直观,并能记忆显示量,不平衡量直接以“g”显示。
因此本机具有操作简易,平衡效率高。
显示直观等特点。
根据不同类型转子的几何尺寸及校正平面与支承间的距离,用数字按键,直接输入a、b、c、rl、r2尺寸,经一次启动运转后即可正确地显示出不平衡量的大小(g)及其相位角度,因此本机适用于多品种批量旋转转子的平衡校验。
二.平衡机的工作条件本平衡机能在下列工作条件及环境下正常工作:a:室温在5~35℃范围;b:相对湿度不超过85%;c:电源电压的波动量不应超过名义值的±10%;d:机器应安装在稳固的基础上,安装水平度在0.2/1000以内;e:周围无腐蚀性介质,无外界振动干扰影响,无电磁辐射。
三.技术参数及主要性能指标3.1 技术参数3.1.1 工件质量范围 10~160kg3.1.2工件最大直径 1000mm3.1.3工件支承轴颈范围 10~140mm3.1.4两支承架中心最小距离 150 mm3.1.5两支承架中心最大距离 1200 mm3.1.6圈带传动处直径范围 30~350mm3.1.7工件传动处为100mm时的转速798,1274,1596,2548r/mim3.1.8电动机功率 1.3/1.8KW3.1.9平衡机重量≈660kg3.2 主要性能指标3.2.1 最小可达剩余不平衡度 emar< 0.5gmm/kg3.2.2 不平衡量减少率URR ≥90%四.主要结构概述本平衡机由机座,传动架,左右支承架、压电传感器、电控电测箱等部件组成,现将主要部件结构分述如下:4.1 左右支承架支承架为本机的重要部件,在左右支承架上各装有一对滚轮。
松开手柄.旋转螺母可调节滚轮架升降。
在支承架中部装有压电传感器,在出厂前压电传感器已调整好,用户切勿自行打开。
如需使支承架在机座上左右移动可将螺钉松开,转动轴即可在机座上移动,待移动至所需位置后,应将螺钉扳紧。
在左右支承架的左右两侧装有限位支架,松开螺钉,可调节限位轮的位置,用来防止转子轴向窜动,在支承架上方有安全架,松开手柄。
可将安全架翻起,便于装拆工件。
松开手柄可调节压块上下的位置。
应定期清洗,并加注高速润滑脂。
4.2 传动系统传动系统安装在机座上,由电机通过传动皮带带动工件旋转。
4.3 电控系统4.4 电测部分详见电测箱使用说明书五.硬支承平衡机原理5.1 关于平衡机的分类根据平衡转速的角频率(w)与平衡机一支承架(包括转子)系统的共振角频率(w 。
)的关系。
平衡机可分三类(见下图w。
0.3 0.5 w 25.1.1 软支承平衡机——平衡转速大于参振系统共振频率的平衡机,一般取w〉2w0。
5.1.2 半硬支承机——平衡转速底于参振系统频率的平衡机,一般取0.3w0〈w〈0.5w 05.1.3 硬支承平衡机——平衡转速低于参振系统共振频率的平衡机,一般取w〈0.3 w 0。
5.2 测量原理分析5.2.1 不平衡力从测量平面到校正平面上的换算。
在硬支承平衡机中,轴承支架的刚度较高。
由于不平衡量所产生的离心力,不能使轴承支架产生摆动。
因而工作与轴承支架几乎不产生振动偏移,这样“不平衡力”就可以被认为是作用在简支梁上的“静力”因此就能用单纯静力学的原理来分析工件的平衡条件。
根据刚性转子的平衡原理,一个动不平衡的刚性转子。
总可以在与旋转轴垂直而不与转子重心相重合的二个校正面上减去或加上适当的质量来达到动平衡。
转子旋转时,支承架上的轴承受到“不平衡”的交变动压力,它包含着“不平衡”的大小和相位的讯息。
为了精确、方便、迅速地测量转子的动不平衡,通常把这一非电量的检测转换成电量检查。
本机采用压电传感器作为机电换能器。
由于压电传感器是装在支承架上。
故测量平面位于支承平面上。
但转子的二个校正平面根据各种转子的工艺要求(如形状、校正手段等)。
一般选择在轴承以外的各个不同位置上。
所以有必要把支承处测量到的不平衡力讯号换算到二个校正平面上去,这可以利用上述静力学原理来实现。
5.2.2 校正平面不平衡相互影响的消除:在硬支承平衡机中,工件两校正平面不平衡的相互影响过两校正平面间距离(“b”)和校正平面至左、右支承中心间距离(“a”和“b”)用“a”、“b”、“c”拨盘(一般称a、b、c、——电路)的调整来予先于以解决,因为“a”、“b”、“c”这几个几何参数可以很快地从被平衡的转子上测量确定,故动平衡效率得以大大提高。
5.2.3 不平衡量的量值显示,参见电测箱说明书5.2.4 校正平面上不平衡测量的计算转子形状和装载方式如图所示图中F L F R——左、右支承轴承上承受的动压力f L f R——左、右校正平面上不平衡质量产生的离心力m L m R ——左、右正平面上的不平衡质量a、c ——左、右校正平面至左、右支承轴承中心间的距离b——左、右校正平面之间的距离r1、r2——左、右校正平面的半径w——旋转角速度若已知a、b、c、r1、r2和F L、F R(可由传感器测得)时,就可以求解m l、m R当刚性转子处于动平衡时,必须满足∑ F=0,∑ M=0的初始条件,对于硬支承平衡机则可按静力学原理列出下列方程:F L+F R-f L-f R=0 (1)F L.a+f R.b-F R.(b+c)=0 (2)由(2)式可得F R=(1+c/b).F R.a/b.F L (3)由(3)式代入(1)式可得:F L=(1+a/b).F L-c/b.F R (4)显然f R=m R·r2·w²(5)f L=m L·r1·w²(6)将(5)式、(6)式分别代入(3)式、(4)式可得mR=1/r2.w²〔(1+c/c).F R-a/b.F L〕 (7)mL=1/r1.w²〔(1+a/b).f L-c/b.F R〕 (8)公式(7)(8)的物理意义 a 、如果转子的几何参数(a 、b 、c 、r1、r2)和平衡转速w 已确定,则校正平面上应加或减的校正质量,可以直接测量出来,并以“克”数显示。
b 、转子校正平面之间的相互影响是由支承和校正平面的位置尺寸a 、b 、c 、所确定的(公式(7)、(8)中的a/b ·F L 和c/b ·F R 项)故不需要校正转子和调整运转试验。
就能在平衡前予先进行平面分离和校正,上述二项物理意义恰好表明了硬支承平衡机所具有的特点。
根据不同形状的转子,按其校正平面与支承之间的相对位置,可以有六种不同的装载形式。
这六种装载形式的平衡方程通过计算,可以得到四组用来模拟运算的方程式。
转子装载形式模拟运算方程a b c F R f R f L F L a b c F R f R f L F L a f L F L c F R f R b F R f R f L b a F L c F R f R f L F L a b c F L F R a b c f L f R f L = ( 1 + a b )F L - c b F R f R = ( 1 + c b )F R - a b F L f L = ( 1 - a b )F L + c b F R f L = ( 1 - a b )F L - c b F R f L = ( 1 + a b )F L + c b F R f R = ( 1 - c b )F R + a b F L f R = ( 1 + c b )F R + a bF L f R = ( 1 - c b )F R - a bF L六.平衡机的吊运与安装6.1 吊运本机的重量约为 kg,因此吊运时应用> kg的起重设备,在吊运时注意起吊的钢丝绳不能碰到支承架上滚轮架,以免支承架受到损伤,影响使用,在靠近钢丝绳处应垫上木块或毡类物品,以防止碰伤油漆表面,为了起吊平衡,应将支承架移至中部,参见吊运位置图。
6.2 安装平衡机应安装在本说明书第二章中要求的工作环境以及专用的基础上。
对硬支承平衡机来说,基础是非常重要的。
一般基础的重量应是平衡机规定的最大工件质量的15倍左右。
当平衡机安装在平硬的基础上后,应用水平仪校正平衡机,在纵横二个方向上的水平度,一般在0.2/1000以内。
在机座与基础之间的接触面应结合良好,不可有如垫圈,小木块等等杂物,并用地脚螺栓及螺母紧固,如安装不好,将直接影响到平衡机的性能。
因此,用户在安装平衡机后,应进行定标量值误差检查,如有较大出入,应校准后方可使用。
在安装平衡机时,在平衡机的四周,应留有一定的空间,以便于起吊工件和维修。
安装结束后,接通电源,本机电源为三相380V、50Hz交流,在接通电源的同时,必须将车间保护地线与本机的专用保护地线牢固地连接好不可松动,以保障人身安全。