整车性能计算软件
汽车理论习题Matlab程序

确定一轻型货车的动力性能货车可装用4挡或5挡变速器,任选其中的一种进行整车性能计算:1绘制汽车驱动力与行驶阻力平衡图;2求汽车最高车速,最大爬坡度及克服该坡度时相应的附着率;3绘制汽车行驶加速度倒数曲线,用图解积分法求汽车用2档起步加速行驶至70km/h的车速-时间曲线,或者用计算机求汽车用2档起步加速行驶至70km/h的加速时间;轻型货车的有关数据:汽油发动机使用外特性的Tq-n曲线的拟合公式为式中,Tq为发动机转矩N m;n为发动机转速r/min;发动机的最低转速nmin =600r/min,最高转速nmax=4000r/min;装载质量 2000kg 整车整备质量 1800kg 总质量 3880kg 车轮半径传动系机械效率ηt=滚动阻力系数f=空气阻力系数×迎风面积C D A=主减速器传动比i0=飞轮转动惯量 I f=m2二前轮转动惯量I w1=m2四后轮转动惯量I w2=m2质心至前轴距离满载 a=质心高满载 hg=解:Matlab程序:1 求汽车驱动力与行驶阻力平衡图和汽车最高车速程序: n=600:10:4000;Tq=+n/1000n/1000.^2+n/1000.^n/1000.^4;m=3880;g=;nmin=600;nmax=4000;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;Ft1=Tqig1i0nT/r;Ft2=Tqig2i0nT/r;Ft3=Tqig3i0nT/r;Ft4=Tqig4i0nT/r;Ft5=Tqig5i0nT/r;ua1=rn/ig1/i0;ua2=rn/ig2/i0;ua3=rn/ig3/i0;ua4=rn/ig4/i0;ua5=rn/ig5/i0;ua=0:5:120;Ff=Gf;Fw=CDAua.^2/;Fz=Ff+Fw;plotua1,Ft1,ua2,Ft2,ua3,Ft3,ua4,Ft4,ua5,Ft5,ua,Fz;title'驱动力-行驶阻力平衡图';xlabel'uakm/s';ylabel'FtN';gtext'Ft1',gtext'Ft2',gtext'Ft3',gtext'Ft4',gtext'Ft5',gtext'Ff+Fw'; zoom on;x,y=ginput1;zoom off;disp'汽车最高车速=';dispx;disp'km/h';汽车最高车速=km/h2求汽车最大爬坡度程序:n=600:10:4000;Tq=+n/1000n/1000.^2+n/1000.^n/1000.^4;m=3880;g=;nmin=600;nmax=4000;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;Ft1=Tqig1i0nT/r;ua1=rn/ig1/i0;Ff=Gf;Fw1=CDAua1.^2/;Fz1=Ff+Fw1;Fi1=Ft1-Fz1;Zoom on;imax=100tanasinmaxFi1/G;disp'汽车最大爬坡度=';dispimax;disp'%';汽车最大爬坡度=%3求最大爬坡度相应的附着率和求汽车行驶加速度倒数曲线程序:clearn=600:10:4000;Tq=+n/1000n/1000.^2+n/1000.^n/1000.^4;m=3880;g=;nmin=600;nmax=4000;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;Ft1=Tqig1i0nT/r;Ft2=Tqig2i0nT/r;Ft3=Tqig3i0nT/r;Ft4=Tqig4i0nT/r;Ft5=Tqig5i0nT/r;ua1=rn/ig1/i0;ua2=rn/ig2/i0;ua3=rn/ig3/i0;ua4=rn/ig4/i0;ua5=rn/ig5/i0;Fw1=CDAua1.^2/;Fw2=CDAua2.^2/;Fw3=CDAua3.^2/;Fw4=CDAua4.^2/;Fw5=CDAua5.^2/;Ff=Gf;deta1=1+Iw1+Iw2/mr^2+Ifig1^2i0^2nT/mr^2;deta2=1+Iw1+Iw2/mr^2+Ifig2^2i0^2nT/mr^2;deta3=1+Iw1+Iw2/mr^2+Ifig3^2i0^2nT/mr^2;deta4=1+Iw1+Iw2/mr^2+Ifig4^2i0^2nT/mr^2;deta5=1+Iw1+Iw2/mr^2+Ifig5^2i0^2nT/mr^2;a1=Ft1-Ff-Fw1/deta1m;ad1=1./a1;a2=Ft2-Ff-Fw2/deta2m;ad2=1./a2;a3=Ft3-Ff-Fw3/deta3m;ad3=1./a3;a4=Ft4-Ff-Fw4/deta4m;ad4=1./a4;a5=Ft5-Ff-Fw5/deta5m;ad5=1./a5;plotua1,ad1,ua2,ad2,ua3,ad3,ua4,ad4,ua5,ad5;axis0 99 0 10;title'汽车的加速度倒数曲线';xlabel'uakm/h';ylabel'1/a';gtext'1/a1';gtext'1/a2';gtext'1/a3';gtext'1/a4';gtext'1/a5'; a=maxa1;af=asinmaxFt1-Ff-Fw1/G;C=tanaf/a/L+hgtanaf/L;disp'假设后轮驱动,最大爬坡度相应的附着率=';dispC;假设后轮驱动,最大爬坡度相应的附着率=4 >>clearnT=;r=;f=;CDA=;i0=;If=;Iw1=;Iw2=;L=;a=;hg=;m=3880;g=;G=mg; ig= ;nmin=600;nmax=4000;u1=rnmin./ig/i0;u2=rnmax./ig/i0;deta=0ig;for i=1:5detai=1+Iw1+Iw2/mr^2+Ifigi^2i0^2nT/mr^2;endua=6::99;N=lengthua;n=0;Tq=0;Ft=0;inv_a=0ua;delta=0ua; Ff=Gf;Fw=CDAua.^2/;for i=1:Nk=i;if uai<=u22n=uaiig2i0/r/;Tq=+n/1000n/1000^2+n/1000^n/1000^4;Ft=Tqig2i0nT/r;inv_ai=deta2m/Ft-Ff-Fwi;deltai=inv_ai/;elseif uai<=u23n=uaiig3i0/r/;Tq=+n/1000n/1000^2+n/1000^n/1000^4;Ft=Tqig3i0nT/r;inv_ai=deta3m/Ft-Ff-Fwi;deltai=inv_ai/;elseif uai<=u24n=uaiig4i0/r/;Tq=+n/1000n/1000^2+n/1000^n/1000^4;Ft=Tqig4i0nT/r;inv_ai=deta4m/Ft-Ff-Fwi;deltai=inv_ai/;elsen=uaiig5i0/r/;Tq=+n/1000n/1000^2+n/1000^n/1000^4;Ft=Tqig5i0nT/r;inv_ai=deta5m/Ft-Ff-Fwi;deltai=inv_ai/;enda=delta1:k;ti=suma;endplott,ua;axis0 80 0 100;title'汽车2档原地起步换挡加速时间曲线';xlabel'时间ts';ylabel'速度uakm/h';>> ginputans =所以汽车2档原地起步换挡加速行驶至70km/h 的加速时间约为已知货车装用汽油发动机的负荷特性与万有特性;负荷特性曲线的拟合公式为:44332210e e e e P B P B P B P B B b ++++=其中,b 为燃油消耗率g/kW h ;Pe 为发动机净功率kW ;拟合式中的系数随转速n 变化;怠速油耗s mL Q id /299.0=怠速转速400r/min;计算与绘制题中货车的1汽车功率平衡图;2最高档与次高档的等速百公里油耗曲线;或利用计算机求货车按JB3352-83规定的六工况循环行驶的百公里油耗;计算中确定燃油消耗值b 时,若发动机转速与负荷特性中给定的转速不相等,可由相邻转速的两根曲线用插值法求得;解:Matlab 程序:(1)汽车功率平衡图程序:clearn=600:10:4000;Tq=+n/1000n/1000.^2+n/1000.^n/1000.^4;m=3880;g=;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;ua1=rn/ig1/i0;ua2=rn/ig2/i0;ua3=rn/ig3/i0;ua4=rn/ig4/i0;ua5=rn/ig5/i0;Pe1=Tq.ig1i0.ua1./3600r;Pe2=Tq.ig2i0.ua2./3600r;Pe3=Tq.ig3i0.ua3./3600r;Pe4=Tq.ig4i0.ua4./3600r;Pe5=Tq.ig5i0.ua5./3600r;ua=0::119;Ff=Gf;Fw=CDAua.^2/;Pf=Ffua/3600;Pw=Fw.ua/3600;Pe0=Pf+Pw./nT;Pe=maxPe1;plotua1,Pe1,ua2,Pe2,ua3,Pe3,ua4,Pe4,ua5,Pe5,ua,Pe0,ua,Pe;axis0 119 0 100;title'汽车功率平衡图';xlabel'uakm/h';ylabel'Pekw';gtext'1',gtext'2',gtext'3',gtext'4',gtext'5',gtext'Pf+Pw/et',gt ext'Pe';2最高档与次高档的等速百公里油耗曲线程序:clearn=600:1:4000;m=3880;g=;G=mg;ig= ;nT=;r=;f=;CDA=;i0=;L=;a=;hg=;If=;Iw1=;Iw2=;n0=815 1207 1614 2012 2603 3006 3403 3804;B00= ;B10= ;B20= ;B30= ;B40= ;B0=splinen0,B00,n;B1=splinen0,B10,n;B2=splinen0,B20,n;B3=splinen0,B30,n;B4=splinen0,B40,n;Ff=Gf;ua4=rn/ig4/i0;ua5=rn/ig5/i0;Fz4=Ff+CDAua4.^2/;Fz5=Ff+CDAua5.^2/;Pe4=Fz4.ua4./nT1000;Pe5=Fz5.ua5./nT1000;for i=1:1:3401b4i=B0i+B1iPe4i+B2iPe4i.^2+B3iPe4i.^3+B4iPe4i.^4; b5i=B0i+B1iPe5i+B2iPe5i.^2+B3iPe5i.^3+B4iPe5i.^4; endpg=;Q4=Pe4.b4./.ua4.pg;Q5=Pe5.b5./.ua5.pg;plotua4,Q4,ua5,Q5;axis0 100 10 30;title'最高档与次高档等速百公里油耗曲线';xlabel'uakm/h';ylabel'百公里油耗L/100km';gtext'4',gtext'5';i为、、、、时的燃油经济性—加速时改变题中轻型货车的主减速器传动比,做出i值对汽车性能的影响;间曲线,讨论不同解:Matlab程序:主程序:i0=,,,,; %输入主传动比的数据for i=1:1:5yi=jiasushijiani0i; %求加速时间endy;for i=1:1:5bi=youhaoi0i; %求对应i0的六工况百公里油耗endb;plotb,y,'+r'hold onb1=linspaceb1,b5,100;y1=splineb,y,b1; %三次样条插值plotb1,y1; %绘制燃油经济性-加速时间曲线title'燃油经济性—加速时间曲线';xlabel'百公里油耗L/100km';ylabel'加速时间s';gtext'i0=',gtext'i0=',gtext'i0=',gtext'i0=',gtext'i0=';子程序:1 function y=jiasushijiani0 %求加速时间的处理函数n1=linspace0,5000; %先求各个档位的驱动力nmax=4000;nmin=600;r=;yita=;CDA=;f=;G=3880;ig=,,,;%i0=for i=1:1:4 %i为档数uamaxi=chesunmax,r,igi,i0; %计算各个档位的最大速度与最小速度uamini=chesunmin,r,igi,i0;uai,:=linspaceuamini,uamaxi,100;ni,:=zhuansuuai,:,r,igi,i0; %计算各个档位的转速范围 Ttqi,:=zhuanjuni,:; %求出各档位的转矩范围 Fti,:=qudongliTtqi,:,igi,i0,yita,r; %求出驱动力Fi,:=fG+CDAuai,:.^2/; %求出滚动阻力和空气阻力的和deltai,:=1+++igi^2i0^2yita/3880r^2; %求转动质量换算系数ai,:=1./deltai,:.3880./Fti,:-Fi,:; %求出加速度F2i,:=Fti,:-Fi,:;end%下面分各个档位进行积分,求出加速时间temp11,:=ua2,:/;temp12,:=1./a2,:;n1=1;for j1=1:1:100if ua3,j1>maxua2,:&&ua3,j1<=70temp21,n1=ua3,j1/;temp22,n1=1./a3,j1;n1=n1+1;endendn2=1;for j1=1:1:100if ua4,j1>maxua3,:&&ua4,j1<=70;temp31,n2=ua4,j1/;temp32,n2=1./a4,j1;n2=n2+1;endendy=temp11,1temp12,1+qiujitemp11,:,temp12,:+qiujitemp21,:,temp22,:+qiuj itemp31,:,temp32,:;end2 function ua=chesun,r,ig,i0; %由转速计算车速ua=r.n/igi0;3 function n=zhuansuua,r,ig,i0; %求转速n=igi0.ua./r;end4 function y=zhuanjun; %求转矩函数y=+.n./1000.n./1000.^2+.n./1000.^.n./1000.^4;5 function y=qudongliTtq,ig,i0,yita,r; %求驱动力函数y=igi0yita.Ttq/r;end6 function p=qiujix0,y0 %求积分函数n0=sizex0;n=n02;x=linspacex01,x0n,200 ;y=splinex0,y0,x; %插值% figure;plotx,y;p=trapzx,y ;end7 %求不同i0下的六工况油耗function b=youhaoi0;global f G CDA yita m r If Iw1 Iw2 pg B0 B1 B2 B3 B4 n %声明全局变量ig=,,,;r=;yita=;CDA=;f=;%i0=;G=3880;If=;Iw1=;Iw2=;m=3880; %汽车的基本参数设定n0=815 1207 1614 2012 2603 3006 3403 3804;B00= ;B10= ;B20= ;B30= ;B40= ;n=600:1:4000;B0=splinen0,B00,n;B1=splinen0,B10,n;B2=splinen0,B20,n; %使用三次样条插值,保证曲线的光滑连续B3=splinen0,B30,n;B4=splinen0,B40,n;ua4=r.n./i0ig4; %求出发动机转速范围内对应的III、IV档车速F4=fG+CDAua4.^2/; %求出滚动阻力和空气阻力的和P_fw4=F4.ua4./yita1000; %求出阻力功率for i=1:1:3401 %用拟合公式求出各个燃油消耗率b4i=B0i+B1iP_fw4i+B2iP_fw4i^2+B3iP_fw4i^3+B4iP_fw4i^4;endpg=; %汽油的重度取Lua4_m=25,40,50; %匀速阶段的车速s_m=50,250,250; %每段匀速走过的距离b4_m=splineua4,b4,ua4_m; %插值得出对应速度的燃油消耗率F4_m=fG+CDAua4_m.^2/; %车速对应的阻力P_fw4_m=F4_m.ua4_m./yita1000; %发动机功率Q4_m=P_fw4_m.b4_m.s_m./102.ua4_m.pg ; Q4_a1=jiasu40,25,ig4,,ua4,i0; Q4_a2=jiasu50,40,ig4,,ua4,i0; Qid=;tid=;s=1075;Q_i=Qidtid; %求出减速阶段的燃油消耗量 Q4all=sumQ4_m+Q4_a1+Q4_a2+Q_i100/s; %IV 档六工况百公里燃油消耗量 b=Q4all;8加速阶段处理函数function q=jiasuumax,umin,ig,a,ua0,i0;global f G CDA yita m r If Iw1 Iw2 pg B0 B1 B2 B3 B4 n; %i0 ; ua1=umin:1:umax; %把速度范围以1km/h 为间隔进行划分 delta=1+Iw1+Iw2/mr^2+Ifig^2i0^2yita/mr^2;P0=Gf.ua0./3600+CDA.ua0.^3/76140+deltam.ua0/3600a/yita; P=Gf.ua1/3600+CDA.ua1.^3/76140+deltam.ua1/3600a/yita; dt=1/a ; %速度每增加1km/h 所需要的时间for i=1:1:3401 %重新利用拟合公式求出b 与ua 的关系 b0i=B0i+B1iP0i+B2iP0i^2+B3iP0i^3+B4iP0i^4; endb1=interp1ua0,b0,ua1; %插值出各个速度节点的燃油消耗率 Qt=P.b1./.pg; %求出各个速度节点的燃油消耗率 i1=sizeQt; i=i12;Qt1=Qt2:i-1;q=Qt1+Qtidt./2+sumQt1dt; %求该加速阶段的燃油消耗量2)求行驶车速Ua =30km/h,在ϕ=路面上车轮不抱死的制动距离;计算时取制动系反应时间'2τ=,制动减速度上升时间''2τ=;3)求制动系前部管路损坏时汽车的制动距离s,制动系后部管路损坏时汽车的制动距离's ; 解:Matlab 程序: (1) 求利用附着系数曲线和制动效率曲线程序: cleark=4080;hgk=;Lk=;ak=;betak=;bk=Lk-ak;%空载时的参数 mm=9290;hgm=;Lm=;am=;betam=;bm=Lm-am;%满载时的参数 z=0::; figure1; fai=z;fai_fk=betakzLk./bk+zhgk;%空载时前轴的φffai_fm=betamzLm./bm+zhgm;%满载时前轴的φffai_rk=1-betakzLk./ak-zhgk;%空载时后轴的φrfai_rm=1-betamzLm./am-zhgm;%满载时后轴的φrplotz,fai_fk,'b--',z,fai_fm,'r',z,fai_rk,'b--',z,fai_rm,'r',z,fai,' k';title'利用附着系数与制动强度的关系曲线';xlabel'制动强度z/g';ylabel'利用附着系数φ';gtext'φr空载',gtext'φr满载',gtext'φ=z',gtext'φf空载',gtext'φf 满载';figure2;Efk=z./fai_fk100;%空载时前轴的制动效率Efm=z./fai_fm100;Erk=z./fai_rk100;Erm=z./fai_rm100;plotfai_fk,Efk,'b',fai_fm,Efm,'r',fai_rk,Erk,'b',fai_rm,Erm,'r'; axis0 1 0 100;title'前.后制动效率曲线';xlabel'附着系数φ';ylabel'制动效率%';gtext'Ef',gtext'Er',gtext'Er',gtext'满载',gtext'空载';(2)问和3问程序:clearmk=4080;hgk=;Lk=;ak=;betak=;bk=Lk-ak;%空载时的参数mm=9290;hgm=;Lm=;am=;betam=;bm=Lm-am;%满载时的参数z=0::1;fai_fk=betakzLk./bk+zhgk;%空载时前轴的φffai_fm=betamzLm./bm+zhgm;%满载时前轴的φffai_rk=1-betakzLk./ak-zhgk;%空载时后轴的φrfai_rm=1-betamzLm./am-zhgm;%满载时后轴的φrEfk=z./fai_fk100;%空载时前轴的制动效率Efm=z./fai_fm100;Erk=z./fai_rk100;Erm=z./fai_rm100;t1=;t2=;ua0=30;fai=;g=;ak1=Erk81gfai/100;am1=Erm81gfai/100;Sk1=t1+t2/2ua0/+ua0^2/ak1;%制动距离Sm1=t1+t2/2ua0/+ua0^2/am1;disp'空载时,汽车制动距离Sk1=';dispSk1;disp'满载时,汽车制动距离Sm1=';dispSm1;ak2=faigak/Lk+faihgk; am2=faigam/Lm+faihgm; ak3=faigbk/Lk-faihgk; am3=faigbm/Lk-faihgm;Sk2=t1+t2/2ua0/+ua0^2/ak2;%制动距离 Sm2=t1+t2/2ua0/+ua0^2/am2; Sk3=t1+t2/2ua0/+ua0^2/ak3; Sm3=t1+t2/2ua0/+ua0^2/am3;disp'空载时,前制动器损坏,汽车制动距离Sk2='; dispSk2;disp'满载时,前制动器损坏,汽车制动距离Sm2='; dispSm2;disp'空载时,后制动器损坏,汽车制动距离Sk3='; dispSk3;disp'满载时,后制动器损坏,汽车制动距离Sm3='; dispSm3;空载时,汽车制动距离Sk1=满载时,汽车制动距离Sm1=空载时,前制动器损坏,汽车制动距离Sk2=满载时,前制动器损坏,汽车制动距离Sm2=空载时,后制动器损坏,汽车制动距离Sk3=满载时,后制动器损坏,汽车制动距离Sm3=二自由度轿车模型的有关参数如下:总质量 m=绕Oz 轴转动惯量 23885m kg I z ⋅= 轴距 L= 质心至前轴距离 a= 质心至后轴距离 b=前轮总侧偏刚度 k 1=-62618N/rad 后轮总侧偏刚度 k 2=-110185N/rad 转向系总传动比 i=20 试求:1) 稳定性因数K 、特征车速u ch ; 2) 稳态横摆角速度增益曲线asr u -⎪⎭⎫δω、车速u=s 时的转向灵敏度sw rδω;3) 静态储备系数.,侧向加速度为时的前、后轮侧偏角绝对值之差21αα-与转弯半径的比值R/R 0R 0=15m;4) 车速u=s 时,瞬态响应的横摆角速度波动的固有圆频率0ω、阻尼比ζ、反应时间τ与峰值反应时间ε解:Matlab 程序: m=;Iz=3885;L=;a=;b=;k1=-62618;k2=-110185; i=20;g=;R0=15;u1=; K=ma/k2-b/k1/L^2; Uch=1/K^1/2;%特征车速disp'稳定性因数s^2/m^2K='; dispK;disp'特征车速m/sUch='; dispUch; u=0::30;S=u./L1+Ku.^2;%稳态横摆角速度增益 plotu,S;title'汽车稳态横摆角速度增益曲线'; xlabel'车速um/s';ylabel'稳态横摆角速度增益'; disp'u=s 时,转向灵敏度为'; dispS448;SM=k2/k1+k2-a/L; ay=g; A=KayL; B=L/R0; R=L/B-A;C=R/R0;%转弯半径比 disp'静态储备系数.='; dispSM;disp'侧向加速度为时前、后轮侧偏角绝对值之差rad a1-a2='; dispA;disp'侧向加速度为时转弯半径比值R/R0='; dispC;W0=L/u1k1k2/mIz1+Ku1^2^1/2;%固有圆频率D=-mk1a^2+k2b^2-Izk1+k2/2LmIzk1k21+Ku1^2^1/2;%阻尼比 t=atan1-D^2^1/2/-mu1aW0/Lk2-D/W01-D^2^1/2;%反应时间 E=atan1-D^2^1/2/D/W01-D^2^1/2+t;%峰值反应时间 disp'车速u=s 时的瞬态响应参数分别为:'; disp'横摆角速度波动的固有圆频率rad 为 '; dispW0;disp'阻尼比为'; dispD;disp'反应时间s 为'; dispt;disp'峰值反应时间s 为'; dispE;稳定性因数s^2/m^2K=特征车速m/sUch=u=s 时,转向灵敏度为静态储备系数.=侧向加速度为时前、后轮侧偏角绝对值之差rad a1-a2=侧向加速度为时转弯半径比值R/R0=车速u=s 时的瞬态响应参数分别为: 横摆角速度波动的固有圆频率rad 为阻尼比为反应时间s 为峰值反应时间s 为车身-车轮双质量系统参数:10,9,25.0,5.10====μγζHz f ;“人体-座椅”系统参数:25.0,3==s s Hz f ζ;车速s m u /20=,路面不平度系数()3801056.2m n G q -⨯=,参考空间频率n 0=;计算时频率步长Hz f 2.0=∆,计算频率点数180=N ;1) 计算并画出幅频特性q z /1、12/z z 、2/z q 和均方根值谱()f G z 1 、()f G z 2 、()f G a 谱图;进一步计算aw w a zz q L a 、、、、、σσσσ21 值 2) 改变“人体-座椅”系统参数:5.0~125.0,6~5.1==s s Hz f ζ;分析aw w L a 、值随s s f ζ、的变化;3) 分别改变车身-车轮双质量系统参数:5.0~125.0,3~25.00==ζHz f ,20~5,18~5.4==μγ;绘制GFd fd z /2σσσ、、 三个响应量均方根值随以上四个系统参数变化的曲线; 解:Matlab 程序 1问yps=;%阻尼比ζ gama=9;%刚度比γ mu=10;%质量比μfs=3;ypss=;g=;a0=10^-6;f0=; ua=20;Gqn0=10^-8;n0=;detaf=;N=180; f=detaf0:N;lamta=f/f0;lamtas=f/fs;Wf=0f;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z1_q=gamasqrt1-lamta.^2.^2+4yps^2lamta.^2./deta;z2_z1=sqrt1+4yps^2lamta.^2./1-lamta.^2.^2+4yps^2lamta.^2; p_z2=sqrt1+2ypsslamtas.^2./1-lamtas.^2.^2+2ypsslamtas.^2; z2_q=gamasqrt1+4yps^2lamta.^2./deta; p_q=p_z2.z2_q;jfg_Gqddf=4pi^2sqrtGqn0n0^2uaf; jfg_Gzdd1f=z1_q.jfg_Gqddf; jfg_Gzdd2f=z2_q.jfg_Gqddf; jfg_Gaf=p_q.jfg_Gqddf;sigmaqdd=sqrttrapzf,jfg_Gqddf.^2;%路面不平度加速度均方根值 sigmazdd1=sqrttrapzf,jfg_Gzdd1f.^2;%车轮加速度均方根值 sigmazdd2=sqrttrapzf,jfg_Gzdd2f.^2;%车身加速度均方根值 sigmaa=sqrttrapzf,jfg_Gaf.^2;%人体加速度均方根值 for i=1:N+1 if fi<=2 Wfi=; elseif fi<=4 Wfi=fi/4; elseif fi<= Wfi=1; elseWfi=fi; end endkk=Wf.^2.jfg_Gaf.^2;aw=sqrttrapzf,kk;%加权加速度均方根值 Law=20log10aw/a0;%加权振级disp'路面不平度加速度均方根值为';dispsigmaqdd; disp'车轮加速度均方根值为';dispsigmazdd1; disp'车身加速度均方根值为';dispsigmazdd2; disp'人体加速度均方根值为';dispsigmaa;disp'加权加速度均方根值为';dispaw;disp'加权振级';dispLaw;figure1plotf,z1_q,title'幅频特性|z1/q|, f=, ζ=,γ=9,μ=10',xlabel'激振频率f/Hz',ylabel'|z1/q|';figure2plotf,z2_z1,title'幅频特性|z2/z1|,f=, ζ=,γ=9,μ=10',xlabel'激振频率f/Hz',ylabel'|z2/z1|';figure3plotf,p_z2,title'幅频特性|p/z2|,fs=, ζs=',xlabel'激振频率f/Hz',ylabel'|p/z2|';figure4plotf,jfg_Gzdd1f,title'车轮加速度均方根值√Gz1f谱图',xlabel'激振频率f/Hz',ylabel'√Gz1f';figure5plotf,jfg_Gzdd2f,title'车身加速度均方根值√Gz2f谱图',xlabel'激振频率f/Hz',ylabel'√Gz2f';figure6plotf,jfg_Gaf,title'人体加速度均方根值√Gaf谱图',xlabel'激振频率f/Hz',ylabel'√Gaf';路面不平度加速度均方根值为车轮加速度均方根值为车身加速度均方根值为人体加速度均方根值为加权加速度均方根值为加权振级2问程序1:cleargama=9;%刚度比γmu=10;%质量比μf0=;g=;a0=10^-6;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f=detaf0:N;lamta=f/f0;Wf=0f;for i=1:N+1if fi<=2Wfi=;elseif fi<=4Wfi=fi/4;elseif fi<=Wfi=1;elseWfi=fi;endendfs=3;ypss=;ypss0=::;a=0ypss0;La=0ypss0;M=lengthypss0;for i=1:Myps=ypss0i;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;p_z2=sqrt1+2ypsslamtas.^2./1-lamtas.^2.^2+2ypsslamtas.^2;z2_q=gamasqrt1+4yps^2lamta.^2./deta;p_q=p_z2.z2_q;jfg_Gqddf=4pi^2sqrtGqn0n0^2uaf;jfg_Gaf=p_q.jfg_Gqddf;kk=Wf.^2.jfg_Gaf.^2;awi=sqrttrapzf,kk;endLaw=20log10aw/a0;figure1plotypss0,aw;title'aw随ζs的变化',xlabel'“人体—座椅”系统的阻尼比ζs',ylabel'aw/ms^-2';figure2plotypss0,Law;title'Law随ζs的变化',xlabel'“人体—座椅”系统的阻尼比ζs',ylabel'Law/dB';程序2:clearyps=;%阻尼比ζgama=9;%刚度比γmu=10;%质量比μf0=;g=;a0=10^-6;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f=detaf0:N;lamta=f/f0;Wf=0f;for i=1:N+1if fi<=2Wfi=;elseif fi<=4Wfi=fi/4;elseif fi<=Wfi=1;elseWfi=fi;endendypss=;fs=::6;M=lengthfs;for i=1:Mfs0=fsi;lamtas=f/fs0;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;p_z2=sqrt1+2ypsslamtas.^2./1-lamtas.^2.^2+2ypsslamtas.^2;z2_q=gamasqrt1+4yps^2lamta.^2./deta;p_q=p_z2.z2_q;jfg_Gqddf=4pi^2sqrtGqn0n0^2uaf;jfg_Gaf=p_q.jfg_Gqddf;kk=Wf.^2.jfg_Gaf.^2;awi=sqrttrapzf,kk;endLaw=20log10aw/a0;figure3plotfs,aw;title'aw随fs的变化',xlabel'“人体—座椅”系统的固有频率fs',ylabel'aw/ms^-2';figure4plotfs,Law;title'Law随fs的变化',xlabel'“人体—座椅”系统的固有频率fs',ylabel'Law/dB';3问程序1:clearfigure1fs=3;yps_s=;g=;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f0=;yps=;gama=9;mu=10;ff0=::3;sigmaz2=0ff0;sigmafd=0ff0;sigmaFd_G=0ff0;M=lengthff0;for i=1:Mf0=ff0i;f=detaf0:N;lamta=f/f0;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z2_qdot=2pifgama.sqrt1+4yps^2lamta.^2./deta;fd_qdot=gamalamta.^2./2pif+eps./sqrtdeta;Fd_Gqdot=2pifgama/g.sqrtlamta.^2/mu+1-1.^2+4yps^2lamta.^2./deta;Gq_dotf=4pi^2Gqn0n0^2ua;Gz2f=z2_qdot.^2Gq_dotf;Gfd_qf=fd_qdot.^2Gq_dotf;GFd_Gf=Fd_Gqdot.^2Gq_dotf;sigmaz2i=sqrttrapzf,Gz2f;sigmafdi=sqrttrapzf,Gfd_qf;sigmaFd_Gi=sqrttrapzf,GFd_Gf;if f0==sgmz2=sigmaz2i;sgmfd=sigmafdi;sgmFd_G=sigmaFd_Gi;endendsz2=20log10sigmaz2/sgmz2;sfd=20log10sigmafd/sgmfd;sFd_G=20log10sigmaFd_G/sgmFd_G;plotff0,sz2,'r-',ff0,sfd,'b-.',ff0,sFd_G,'k--';axis 3 -25 15;title'三个响应量均方根值随f0变化的曲线',xlabel'车身部分固有频率f0/Hz',ylabel'σz2/dB,σfd/dB,σFd/G/dB';程序2:clearfigure2fs=3;yps_s=;g=;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f0=;yps=;gama=9;mu=10;c= i=1:Myps=yps0i;f=detaf0:N;lamta=f/f0;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z2_qdot=2pifgama.sqrt1+4yps^2lamta.^2./deta;fd_qdot=gamalamta.^2./2pif+eps./sqrtdeta;Fd_Gqdot=2pifgama/g.sqrtlamta.^2/mu+1-1.^2+4yps^2lamta.^2./deta;Gq_dotf=4pi^2Gqn0n0^2ua;Gz2f=z2_qdot.^2Gq_dotf;Gfd_qf=fd_qdot.^2Gq_dotf;GFd_Gf=Fd_Gqdot.^2Gq_dotf;sigmaz2i=sqrttrapzf,Gz2f;sigmafdi=sqrttrapzf,Gfd_qf;sigmaFd_Gi=sqrttrapzf,GFd_Gf;if yps==sgmz2=sigmaz2i;sgmfd=sigmafdi;sgmFd_G=sigmaFd_Gi;endendsz2=20log10sigmaz2/sgmz2;sfd=20log10sigmafd/sgmfd;sFd_G=20log10sigmaFd_G/sgmFd_G;plotyps0,sz2,'r-',yps0,sfd,'b-.',yps0,sFd_G,'k--';axis -4 4;title'三个响应量均方根值随ζ变化的曲线',xlabel'车身部分阻尼比ζ',ylabel'σz2/dB,σfd/dB,σFd/G/dB';程序3:clearfigure3fs=3;yps_s=;g=;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f0=;yps=;mu=10;gama0=4::19;sigmaz2=0gama0;sigmafd=0gama0;sigmaFd_G=0gama0;M=lengthgama0;for i=1:Mgama=gama0i;f=detaf0:N;lamta=f/f0;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z2_qdot=2pifgama.sqrt1+4yps^2lamta.^2./deta;fd_qdot=gamalamta.^2./2pif+eps./sqrtdeta;Fd_Gqdot=2pifgama/g.sqrtlamta.^2/mu+1-1.^2+4yps^2lamta.^2./deta;Gq_dotf=4pi^2Gqn0n0^2ua;Gz2f=z2_qdot.^2Gq_dotf;Gfd_qf=fd_qdot.^2Gq_dotf;GFd_Gf=Fd_Gqdot.^2Gq_dotf;sigmaz2i=sqrttrapzf,Gz2f;sigmafdi=sqrttrapzf,Gfd_qf;sigmaFd_Gi=sqrttrapzf,GFd_Gf;if gama==9sgmz2=sigmaz2i;sgmfd=sigmafdi;sgmFd_G=sigmaFd_Gi;endendsz2=20log10sigmaz2/sgmz2;sfd=20log10sigmafd/sgmfd;sFd_G=20log10sigmaFd_G/sgmFd_G;plotgama0,sz2,'r-',gama0,sfd,'b-.',gama0,sFd_G,'k--';axis4 18 -5 6;title'三个响应量均方根值随γ变化的曲线',xlabel'悬架与轮胎的刚度比γ',ylabel'σz2/dB,σfd/dB,σFd/G/dB';程序4:clearfigure4fs=3;yps_s=;g=;ua=20;Gqn0=10^-8;n0=;detaf=;N=180;f0=;yps=;gama=9;mu0=5::20;sigmaz2=0mu0;sigmafd=0mu0;sigmaFd_G=0mu0;M=lengthmu0;for i=1:Mmu=mu0i;f=detaf0:N;lamta=f/f0;lamtas=f/fs;deta=1-lamta.^2.1+gama-1/mulamta.^2-1.^2+4yps^2lamta.^2.gama-1/mu+1la mta.^2.^2;z2_qdot=2pifgama.sqrt1+4yps^2lamta.^2./deta;fd_qdot=gamalamta.^2./2pif+eps./sqrtdeta;Fd_Gqdot=2pifgama/g.sqrtlamta.^2/mu+1-1.^2+4yps^2lamta.^2./deta;Gq_dotf=4pi^2Gqn0n0^2ua;Gz2f=z2_qdot.^2Gq_dotf;Gfd_qf=fd_qdot.^2Gq_dotf;GFd_Gf=Fd_Gqdot.^2Gq_dotf;sigmaz2i=sqrttrapzf,Gz2f;sigmafdi=sqrttrapzf,Gfd_qf;sigmaFd_Gi=sqrttrapzf,GFd_Gf;if mu==10sgmz2=sigmaz2i;sgmfd=sigmafdi;sgmFd_G=sigmaFd_Gi;endendsz2=20log10sigmaz2/sgmz2;sfd=20log10sigmafd/sgmfd;sFd_G=20log10sigmaFd_G/sgmFd_G;plotmu0,sz2,'r-',mu0,sfd,'b-.',mu0,sFd_G,'k--';axis5 20 -2 2;title'三个响应量均方根值随μ变化的曲线',xlabel'车身与车轮部分质量比μ',ylabel'σz2/dB,σfd/dB,σFd/G/dB';。
AVL_CRUISE_2014_整车经济性动力性分析操作指导书
A VL_CRUISE_2014_整车经济性动力性分析操作指导书AVL_CRUISE_2014_整车经济性动力性分析操作指导书目录第一章 AVL Cruise 2014 简介 (1)1.1 动力性经济性仿真集成平台 (1)1.2 AVL Cruise建模分析流程 (2)1.3 主要模块功能 (3)1.4 A VL Cruise计算任务的设定 (9)第二章汽车零部件模型建立 (13)2.1.软件启动 (14)2.2.Project创建 (15)第三章整车动力经济性分析模型连接 (45)3.1.部件之间物理连接 (45)3.2.部件之间信号连接 (47)第四章整车动力经济性分析任务设置 (51)4.1 爬坡性能任务制定 (52)4.2 等速百公里油耗分析 (56)4.3 最大车速分析 (59)4.4 循环工况油耗分析 (62)4.5 加速性能任务制定 (65)第五章计算及分析处理 (69)5.1. 计算参数设置 (69)5.2. 分析处理 (69)第六章整车动力性/经济性计算理论 (75)6.1 动力性计算公式 (75)6.1.1 变速器各档的速度特性 (75)6.1.2 各档牵引力 (75)6.1.3 各档功率计算 (76)6.1.4 各档动力因子计算 (76)6.1.5 最高车速计算 (77)6.1.6 爬坡能力计算 (78)6.1.7 最大起步坡度 (78)6.1.8 加速性能计算 (79)6.1.9 比功率计算 (80)6.1.10 载质量利用系数计算 (80)6.2 经济性计算公式 (81)6.2.1 直接档(或超速档)等速百公里油耗计算 (81)6.2.2 最高档全油门加速500m的加速油耗(L/500m) (81)6.2.3 循环工况百公里燃油消耗量 (83)第一章 AVL Cruise 2014 简介1.1 动力性经济性仿真集成平台AVL Cruise是AVL公司开发的一款整车及动力总成仿真分析软件。
ADAMS CAR模块介绍
1.2.4驾驶员模块Driver
ADAMS/Driver 是一个可选模块,是 在德国的 IPG-Driver 基础上经过二次 开发形成的成熟产品。利用该模块, 可以提高车辆动力学仿真的真实感, 特别使用与装备有各种正负反馈的智 能系统(例如:ABS、4WS、CCS)的汽 车。
1.2.5 动力传动模块Driveline
1.2
ADAMS/CAR软件相关模块
SD EDM CSM Driver
3D Road Engine powered by FEV Durability Solver Controls
Driveline
CAR
MACHANISM/Pro
Exchange
1.2.1悬架设计软件包SD
Suspension Design 中包括以特征 参数(前束、定位参数、速度)表示 的悬架模型。通过这些特征参数,设 计师可以快速确定在任意载荷和轮胎 下的轮心位置和方向,在此基础上, 快速建立包括橡胶衬套在内的柔体悬 架模型。它采用的是全参数的面板建摸方式。借助悬架模 块,设计师可以提出原始的悬架设计方案。在此基础上, 通过调整悬架参数就可以快速确定满足理想悬架特性的悬 架方案。
立体平画法 曲面的多边形表示方法 和着色文件
波前文件 FEA载荷 储存模型几何形状和运动数据的输出文件 输出有关节点载荷的变化情况,供进一步的有 限元分析
电子数据表 以电子数据表格式输出的仿真分析结果
第4章 ADAMS/CAR在汽车操纵稳 定性中的应用
4.1 稳态转向试验仿真
2.2 仿真过程
Build
Test
Simulate &Review
PostProcessor
基于Trucksim的整车动力性能仿真分析

基于Trucksim的整车动力性能仿真分析吴涛;焦静;范学琼;曾丽华【摘要】利用Trucksim软件对某重型商用车进行建模及动力性能仿真,将仿真结果与理论计算值进行比较和分析。
结果表明,采用Trucksim建模仿真得到的动力性指标结果均比理论计算结果更加准确。
%In this paper, a new method for a heavy-duty commercial vehicles of power performance calculation with software Trucksim is introduced. The simulation results are compared with the ones got by theoretical formulas, where the results got by Trucksim are proved more precise.【期刊名称】《汽车实用技术》【年(卷),期】2016(000)006【总页数】3页(P63-65)【关键词】重型牵引车;Trucksim;参数化建模;动力性;仿真【作者】吴涛;焦静;范学琼;曾丽华【作者单位】陕西重型汽车有限公司,陕西西安 710200; 第四军医大学放射医学教研室,陕西西安 710032;轻工业钟表研究所,陕西西安 710032;陕西重型汽车有限公司,陕西西安 710200;第四军医大学放射医学教研室,陕西西安 710032【正文语种】中文【中图分类】U469.210.16638 /ki.1671-7988.2016.06.022CLC NO.: U469.2 Document Code: A Article ID: 1671-7988 (2016)06-63-03 动力性是汽车各种性能中最基本、最重要的性能,,涉及到设计开发过程中车载发动机功率和转矩、各档传动比等参数的选择,更在很大程度上决定了汽车这一高效率运输工具的运输效率之高低[1]。
(整理)AVL-Cruise整车性能计算分析流程与规范.
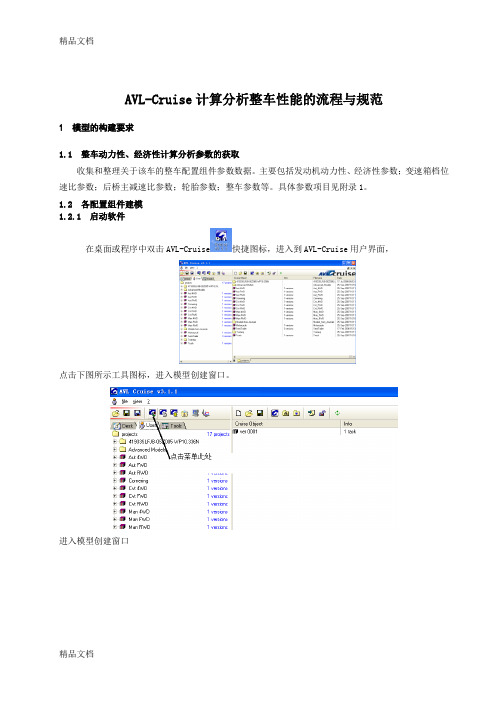
精品文档AVL-Cruise计算分析整车性能的流程与规范1 模型的构建要求1.1 整车动力性、经济性计算分析参数的获取收集和整理关于该车的整车配置组件参数数据。
主要包括发动机动力性、经济性参数;变速箱档位速比参数;后桥主减速比参数;轮胎参数;整车参数等。
具体参数项目见附录1。
1.2 各配置组件建模1.2.1 启动软件在桌面或程序中双击AVL-Cruise快捷图标,进入到AVL-Cruise用户界面,点击下图所示工具图标,进入模型创建窗口。
进入模型创建窗口1.2.2 建立整车参数模型进入模型创建窗口后,将鼠标选中Vehicle Model,鼠标左键点击整车图标,按住左键将图标拖曳到建模区,如下图所示:双击整车图标后打开整车参数输入界面,根据参数输入要求依次填写数据:Author :此处填写计算者,不能用中文,可以用汉语拼音和英文,该软件所有填写参数处均不能出现中文。
Comment :此处填写分析的车型号。
Notice1、Notice2、Notice3:此处填写分析者认为需要注意的事项,比如特殊发动机型号等,没有可 以不填。
1.2.2.1 整车参数数据填写规则进入模型创建窗口后,将鼠标选中Engine Model ,鼠标左键点击发动机图标,按住左键将图标拖曳到建模区,如下图所示:作者名称、注解说明,可以不填注解说明,可以不填油箱容积 内外温差:0试验台架支点高度:100内外压差:0 牵引点到前轴距离轴距空载、半载、满载下整车重心到前轴中心距离、重心高度、鞍点高度、前轮充气压力、后轮充气压力整备质量 整车总重迎风面积风阻系数前轮举升系数后轮举升系数双击发动机图标后打开发动机参数输入界面,根据参数输入要求依次填写数据:1.2.3.1 发动机参数输入规则按照图示箭头位置单击按钮,弹出外特性输入窗口:此处根据厂家提供的发动机数据输入转速与扭矩关系发动机转速与扭矩的关系从外特性数据表中可以直接得到;填写时注意对应关系即可。
CRUISE_介绍资料_2010
• 变速箱元件库(GearBox Library):包含变速箱,单级齿轮传动机构,差速器,行星齿轮 系,双离合器变速箱(DCT),自动变速器(CVT)等元件,可实现对变速系统的仿真分 析;
GSP Optimization:自动变速箱换挡规律的优化功能,该功能基于 CRUISE 环境中已有的车辆 模型,可以对车辆所有可能运行的工作区域进行分析,考虑档位、油门开度、路面坡度、液力变矩 器的状态等一系列参数;同时考虑经济性和排放性的指标要求,可根据不同的工况特性进行变速箱 换挡特性的优化,其自动生成的 K 因子可以让用户方便的实现经济性和排放性的平衡需求。
GSP Wizard: 基于车辆性能和燃油消耗,利用简单的方法生成换挡控制策略;需要的参数较 少,适用于初级用户。
GSP Generation:自动变速箱换挡规律的生成功能,该功能基于 CRUISE 环境中已有的车辆 模型,可以对车辆所有可能运行的工作区域进行分析,考虑档位、油门开度、路面坡度、液力变矩 器的状态等一系列参数;同时考虑经济性驾驶需求、经济性和动力性驾驶需求、动力性驾驶需求、 强动力性驾驶需求。
典型应用
地址:上海浦东金桥榕桥路 327 号 邮编:201206 TEL:021-58996900 FAX:021-58996822
3
李 斯 特 技 术 中 心 (上 海) 有 限 公 司
LIST Technical Center (Shanghai) Co., LTD
a. 动力总成匹配 基于 CRUISE 的 Components Variation 功能,可以对多发动机,变速箱,主减速器,轮胎等总 成元件进行匹配,根据预先设定的动力,经济和排放性指标在匹配结果上进行合理选型。
AVL_CRUISE_2019_整车经济性动力性分析操作指导书
A VL_CRUISE_2019_整车经济性动力性分析操作指导书AVL CRUISE纯电动汽车经济性动力性分析操作指导书目录第一章 AVL Cruise 2014 简介 (2)1.1 动力性经济性仿真集成平台 (2)1.2 A VL Cruise建模分析流程 (3)1.3 主要模块功能 (4)1.4 A VL Cruise计算任务的设定 (9)第二章汽车零部件模型建立 (14)2.1.软件启动 (14)2.2.Project创建 (15)第三章整车动力经济性分析模型连接 (44)3.1.部件之间物理连接 (44)3.2.部件之间信号连接 (45)第四章整车动力经济性分析任务设置 (49)4.1 爬坡性能任务制定 (50)4.2 等速百公里油耗分析 (53)4.3 最大车速分析 (56)4.4 循环工况油耗分析 (59)4.5 加速性能任务制定 (62)第五章计算及分析处理 (65)5.1. 计算参数设置 (65)5.2. 分析处理 (65)第六章整车动力性/经济性计算理论 (71)6.1 动力性计算公式 (71)6.1.1 变速器各档的速度特性 (71)6.1.2 各档牵引力 (71)6.1.3 各档功率计算 (72)6.1.4 各档动力因子计算 (72)6.1.5 最高车速计算 (72)6.1.6 爬坡能力计算 (73)6.1.7 最大起步坡度 (74)6.1.8 加速性能计算 (74)6.1.9 比功率计算 (76)6.1.10 载质量利用系数计算 (76)6.2 经济性计算公式 (76)6.2.1 直接档(或超速档)等速百公里油耗计算 (76)6.2.2 最高档全油门加速500m的加速油耗(L/500m) (77)6.2.3 循环工况百公里燃油消耗量 (78)第一章 AVL Cruise 2014 简介1.1 动力性经济性仿真集成平台AVL Cruise是AVL公司开发一款整车及动力总成仿真分析软件。
MSC.Nastran高性能计算功能介绍
MSC.Nastran 名称介绍为了缩短MSC.Nastran 计算时间,MSC.Nastran 主要利用如下技术:1. MSC Nastran 共享内存并行计算,通过单机多CPU 并行计算技术,用来实现大模型的求解,缩短计算时间,提高分析效率;2. MSC Nastran ACMS 模块,即自动部件模态综合法,通过整车模型由一个整体矩阵剖分为多个子结构,单独计算每个子结构,后超单元技术,重新生成系统整体响应。
可以使用分析时间缩短为原来的四分之一或更低,计算频率阶数越多,该方法效率越高;3. MSC Nastran 分布式并行计算,与ACMS 模块结合,通过分布式并行计算技术将子结构分配到多台计算,用来实现大模型的求解,缩短计算时间,提高分析效率。
MSC Nastran Distributed Parallel (DMP)支持频率域,几何域,自由度域的划分方法,与ACMS 模块结合,大幅缩短计算时间。
MSC.Nastran 2013 HPC 计算配置提交计算时,使用MODE =i8内存无限制模式,充分利用硬件资源,加速计算,输入格式如下:修改相应目录下,Nastran配置文件,充分调用硬件资源进行计算, 路径为(根据个人电脑设置,该路径会不同):C:\MSC.Software\MSC_Nastran\20130\conf\NAST20130.rcf在该文件中添加或修改如下:BUFFSIZE=ESTIMATEPARALLEL=NPROC(例如4或8,32等,要确定有SMP模块)MEMORY=MAXMEMORYMAX=0.85*PHYSICAL(指计算机物理内存)MSC.Nastran 2013 HPC测试案例测试模型1,TRIM模型,节点数130万,单元数129万,自由度为750万,使用MSC.Nastran 的SMP和ACMS模块分别进行2次计算,二次计算总结如下表。
表1-1 750万模型测试备注:1、0~45Hz次计算时,使用硬盘为SCSI盘;0~75Hz使用硬盘为SSD固态硬盘,读写速度更快。
汽车整车分析GT-DRIVE的介绍和应用

整车性能分析GT-DRIVE的简介及应用主要内容GT-DRIVE简介适用车型主要应用 操作方法简介☐GT-DRIVE是GT-SUITE系列软件的重要组成部分,GT-SUITE是美国Gamma Technologies公司开发的汽车仿真分析软件;☐用于车辆设计参数的分析、各种运行情况下的耗油量和噪声的计算,同时还可以用于发动机性能评估、冷却系统性能评估等;☐GT-POWER:发动机的性能,声学及控制系统模拟分析等;☐GT-DRIVE:车辆及动力传动系统系统模拟分析等;☐GT-VTRAIN:配气机构的运动学、动力学、摩擦学分析等;☐GT-COOL:发动机热量管理及冷却系统分析等;☐GT-FUEL:喷射系统压力及流体动力学分析等;☐GT-CRANK :曲轴动力学、动平衡及轴承分析等适用车型☐根据驱动方式分类:前轮驱动、后轮驱动、四轮驱动等☐根据用途分类:轿车、越野车、货车(可带挂车)等☐根据变速器分类:MT、AT、CVT☐新概念车:混合动力车(HEV)、燃料电池车、纯电动车等主要应用☐车辆/发动机的性能匹配☐循环工况模拟-燃油经济性和排放☐发动机/传动控制系统仿真☐发动机-变速器-车辆动力性能☐传动系统的部件设计和匹配☐传动系统的扭振、驾驶性能、制动性能、牵引能力操作方法☐GT-DRIVE是基于面向对象技术编写的,与GT-SUITE的其它软件拥有相同的软件界面GT-ISE;☐从模型图的建立、运行,到数据的后处理,GT-DRIVE的操作都是在GT-ISE中进行,使用方法简便、高效;GT-DRIVE的界面如下图所示,主要组成部分包括:菜单、工具栏、建模区域、数据库、模型管理器等。
基于GT-DRIVE的牵引车整车性能及动力装置匹配分析1 前言在汽车的研制过程中利用合理的理论建立正确的数学模型和力学模型,利用模拟计算的研究方法研究部件性能的各参数对整车性能的影响效果以及各个参数之间的相互影响关系,不仅能及时发现设计中的问题,预见整车的性能水平,并且能大大缩短研制周期,避免不必要的错误和损失。
整车匹配计算(改)

06
整车匹配计算案例研究
案例一:某电动汽车的底盘系统匹配
底盘系统匹配
底盘系统是电动汽车的重要组成部分,包括悬挂系统、制动系统、转向系统等。在底盘系 统匹配过程中,需要考虑多种因素,如车辆性能要求、行驶工况、动力电池特性等。
计算方法
采用多体动力学、有限元分析等计算方法,对底盘系统的各个子系统进行建模和仿真分析 ,以确定最佳的匹配参数和设计方案。
Байду номын сангаас果评估与优化
总结词
评估性能和改进方案
详细描述
根据性能仿真的结果,评估整车的性能指标 是否满足设计要求,如果不满足,则需要对 参数进行优化调整,重复性能仿真的过程, 直到满足设计要求为止。最终输出的结果可
以为实际生产提供指导和参考。
04
整车匹配计算工具与技 术
CAD建模技术
总结词
CAD建模技术是整车匹配计算中的基础工具,用于创 建车辆零部件和整车的三维模型。
车身系统匹配
车身系统匹配是指根据车辆的外观设计、结构强度、空气动力学等要求,选择合 适的车身材料、结构、工艺等,并确定它们之间的匹配关系。
车身系统匹配需要考虑车辆的美观性、耐久性、经济性等多个方面,以确保车辆 在长期使用过程中的优异表现。
03
整车匹配计算流程
需求分析
总结词
明确计算目标
详细描述
在整车匹配计算中,首先需要明确计算的目标和要求,包括需要优化的性能指标、约束条件以及计算精度等,为 后续的参数设计和性能仿真提供指导。
底盘系统匹配需要考虑车辆的操控稳 定性、舒适性、安全性等多个方面, 以确保车辆在各种行驶条件下的优异 表现。
电气系统匹配
电气系统匹配是指根据车辆的用电需 求,选择合适的电池、电机、控制器 等关键部件,并确定它们之间的匹配 关系。
文献——avl cruise在纯电动车整车性能开发中的应用(上汽乘用车公司技术中心)
AVL Cruise在纯电动车整车性能开发中的应用童荣辉康飞胡亮(上汽乘用车公司技术中心)前言本文阐述了纯电动汽车整车EMDQ性能开发过程中Cruise的应用,项目开发前期设定性能目标,初步对动力总成参数的选择,使用Cruise进行计算验证,而后对部分性能进行了实车验证,计算结果与实测结果基本吻合,给整车性能开发提供了理论依据。
关键词纯电动车EMDQ Cruise计算1、引言纯电动汽车作为新能源汽车的一个重要解决方案,已经越来越受到国内外各大整车企业及相关研究机构的重视。
在纯电动汽车开发过程中,针对整车性能EMDQ的目标定义及对应的电机、电池、减速器等动力总成参数的选型对整个开发过程起着决定性的作用。
所以在纯电动汽车开发前期对整车性能的精确预测也就显得尤为重要。
AVL Cruise作为一款行业领先的整车性能计算软件,无论是针对传统车还是新能源汽车的计算,都有着无法比拟的优势。
2、纯电动汽车整车性能EMDQ的定义及目标设定2.1 纯电动汽车整车性能EMDQ的定义本文所指的纯电动汽车整车性能EMDQ主要包括以下几个方面:E—Energy,通常是指纯电动汽车的等速续驶里程、百公里耗电量;M—Mass,通常是指纯电动汽车的整备质量;DQ—Drive Quality,通常是指纯电动汽车的动力性。
2.2 纯电动汽车整车性能EMDQ目标设定本纯电动车项目的开发是依托某A0级轿车平台上进行的,所以在项目前期目标定义中,我们就一致认为其整车性能EMDQ不能低于传统车,基于这个概念,我们定义了以下基本EMDQ性能:表1 纯电动汽车EMDQ目标设定3、纯电动汽车动力总成选型及Cruise计算验证3.1 纯电动汽车动力总成选型动力总成的选型主要包括电机、电池、及减速箱速比的选择,根据以上设定的EMDQ目标及电机、电池、减速箱供应商提供的参数,我们初步定义了以下动力总成的基本参数:表2 纯电动汽车动力总成参数定义3.2 纯电动汽车整车EMDQ性能Cruise计算3.2.1 纯电动汽车Cruise模型的搭建Cruise计算结果的精确与否与模型搭建过程中参数录入的准确性有极大的关系,根据以往传统汽车Cruise计算及对纯电动汽车的研究,我们认为要得到一个具有精确参考价值的Cruise模型,必须尽量满足模型中的各子系统参数输入,特别是一些关键的参数输入,就纯电动车来讲,我们觉得以下参数是对纯电动车性能计算至关重要的:1、整车参数—包括整车尺寸、重量、空气动力学参数、阻力模型(特别是滑行曲线)。
整车NVH性能开发中的CAE技术综述

整车NVH性能开发中的CAE技术综述一、本文概述随着汽车工业的飞速发展,消费者对汽车品质的要求日益提高,整车的NVH(Noise, Vibration, and Harshness,即噪声、振动与声振粗糙度)性能已成为评价汽车品质的重要指标。
为了满足市场的需求和提升产品竞争力,整车NVH性能开发显得尤为关键。
在这个过程中,计算机辅助工程(CAE)技术以其高效、精准的特点,成为了NVH性能开发中不可或缺的工具。
本文旨在对整车NVH性能开发中的CAE技术进行全面综述。
我们将对NVH性能的重要性和影响因素进行简要介绍,以便更好地理解CAE技术在NVH性能开发中的应用背景。
接着,我们将重点分析CAE 技术在整车NVH性能开发中的应用现状,包括其在噪声控制、振动分析和声振粗糙度优化等方面的具体应用。
我们还将探讨CAE技术在NVH性能开发中的优势和局限性,以及未来可能的发展方向。
通过本文的综述,我们期望能够为从事整车NVH性能开发的工程师和研究人员提供有益的参考和启示,推动CAE技术在整车NVH性能开发中的进一步应用和发展。
二、NVH性能开发概述NVH(Noise, Vibration, and Harshness)性能是评价汽车乘坐舒适性的重要指标,涵盖了车内噪音、振动以及冲击等感觉。
随着消费者对汽车舒适性要求的日益提高,NVH性能的开发和优化在整车开发中占据了越来越重要的地位。
NVH性能开发不仅涉及到车辆设计、制造、试验等多个环节,还涵盖了声学、振动理论、材料科学等多个学科领域。
在整车NVH性能开发中,CAE(Computer-Aided Engineering)技术以其高效、精确的特点,成为了不可或缺的工具。
CAE技术可以对车辆的NVH性能进行仿真分析和预测,帮助工程师在车辆设计阶段就发现并解决潜在的NVH问题,避免了后期物理样车试验的繁琐和高昂成本。
同时,CAE技术还可以对不同的设计方案进行快速比较和优化,提高了整车的NVH性能开发效率。
AVL CRUISE基础介绍资料
AVL CRUISECRUISE 基础培训教程李斯特技术中心(上海)有限公司先进模拟技术部杨喜云Content概述用户界面结构与管理启动CRUISECRUISE建模流程项目/方案的使用管理组件数据链接项目数据–任务文件夹计算中心高级计算–参数和零部件匹配,DoE计算结果浏览与评估–结果管理器概述客户需求优化车辆及车辆部件(燃油经济性, 车辆动力性)分析各种车辆和传动系统结构(AT,AMT, DCT, CVT, GSI, THS)评估概念新车(e.g. 混合动力车,燃料电池车,纯电动车)评估传动系统瞬态性能设计车辆热管理系统HiL & RT 仿真分析AVL 解决方案=> AVL CRUISE –车辆性能仿真平台计算和优化燃油消耗、排放和整车性能的综合工具适用于设计仿真任何传动系结构的车辆基于直观的模块化组件的传动系模型真实的再现实车性能与零部件供应商和整车厂家共同发展完善的求解器节省计算时间IntroductionCRUISE–车辆系统的集成●在短时间内可以便捷的改变车辆的结构布置形式●可以快速便捷的将传统车辆改变为混合动力汽车●可以快速实现先进的动力传动概念(AMT, DCT, …)●有大量电气部件,可以用于电动汽车设计开发●便于车辆控制系统的开发和研究●车辆模型的搭建过程简捷易懂●采用模块化建模理念,早期建模阶段所需参数较少●伴随开发过程的不断深入,整个模型会不断完善●提供与ORACLE系统的接口,方便进行数据管理●内置大量的计算任务●动力传动系统的优化设计●传动系统的参数优化●动力总成的匹配优化●动力总成子系统的集成AVL CRUISE软件的适用范围n传统车辆n混合动力及n纯电动汽车n先进动力传动系统研究n2轮及3轮摩托车研究n公交车,卡车及拖挂车研究n特种车辆研究n Introduction应用示例–详细的变速箱评价逐元件建立变速箱模型研究变速箱对燃油经济性和车辆动力性的影响评估TCU控制策略应用示例–RT仿真评估车辆动力学性能:制动性能制动稳定性稳定性控制传动系分析:车辆动力学对燃油经济性和车辆性能的影响换挡品质评价传动系分析同一个模型灵活应用于开发流程的各个阶段简单快捷的更改传动系结构Office/HiL基于测试的实时仿真GSP功能简述●GSP向导⏹基于车辆性能和燃油消耗,利用简单的方法生成换挡控制策略;⏹需要的参数较少,适用于初级用户。
CRUISE_整车性能仿真平台
11
Cycle Run-循环行驶工况
图形输出 文本报告
提供报告自动生 成模板
12
Climbing Performance-爬坡性能分析
计算所有车速下车 辆可以克服的道路 最大坡度
起步坡度计算:计 算各挡下,以一定 加速度起步可以克 服的道路最大坡度
13
Climbing Performance-爬坡性能分析 各档最大爬坡度计算:
Extra Urban Driving Cycle ( EUDC ):
MVEG ( EUDC - EFZ ):
US City Cycle ( FTP 72 without break ) ( FTP 75 with break )
US Highway Driving Cycle ( HDC ) Japan 10 / 15 Mode:
转鼓试验 台架试验 道路试验
产品定型
工艺
……
45
CRUISE的应用实例
46
CRUISE的应用实例
最高车速计算与试验结果对比
CRUISE 试验值
车速 106.97 107.50
47
CRUISE的应用实例
次高档加速计算与试验结果对比曲线
时 间( s)
55 次高档加速CRUISE计算结果
50
次高档加速试验结果
组件属性窗口
组件特性主窗口
8
计算任务定义 计算任务(Calculation Tasks)
循环行驶工况 Cycle Run
爬坡性能分析 Climbing Performance
稳态行驶性能分析 Constant Drive
各挡性能计算 Run in all Gears 最高车速计算 Maximum Velocity
多体系统动力学分析软件ADAMS的介绍
多体系统动力学分析软件ADAMS的介绍ADAMS是美国学者蔡斯(Chace)等人利用多刚体动力学理论,选取系统每个刚体的质心在惯性参考系中的三个直角坐标和反映刚体方位的为广义坐标编制的计算程序。
其中应用了吉尔(Gear)等解决刚性积分问题的算法,并采用了稀疏矩阵技术来提高计算效率。
该软件因其强大的功能而在汽车航天等领域得到了广泛的应用。
1 ADAMS软件简介在研究汽车各种性能时,研究对象的建模、分析与求解始终是关键。
多体系统动力学软件为汽车动力学研究提供了强大的数学分析工具。
ADAMS软件就是其中的佼佼者。
ADAMS(Auto matic Dynamic Analysis of Mechanical System)软件,是由美国机械动力公司(Mechanical Dynamics Inc.)开发的最优秀的机械系统动态仿真软件,是世界上最具权威性的,使用范围最广的机械系统动力学分析软件。
用户使用ADAMS软件,可以自动生成包括机-电-液一体化在内的、任意复杂系统的多体动力学数字化虚拟样机模型,能为用户提供从产品概念设计、方案论证、详细设计、到产品方案修改、优化、试验规划甚至故障诊断各阶段、全方位、高精度的仿真计算分析结果,从而达到缩短产品开发周期、降低开发成本、提高产品质量及竞争力的目的。
由于ADAMS软件具有通用、精确的仿真功能,方便、友好的用户界面和强大的图形动画显示能力,所以该软件已在全世界数以千计的著名大公司中得到成功的应用。
ADAMS软件一方面是机械系统动态仿真软件的应用软件,用户可以运用该软件非常方便地对虚拟样机进行静力学、运动学和动力学分析。
另一方面,又是机械系统仿真分析开发工具,其开放性的程序结构和多种接口,可以成为特殊行业用户进行特殊机械系统动态仿真分析的二次开发工具平台。
在产品开发过程中,工程师通过应用ADAMS软件会收到明显效果:*分析时间由数月减少为数日*降低工程制造和测试费用*在产品制造出之前,就可以发现并更正设计错误,完善设计方案*在产品开发过程中,减少所需的物理样机数量*当进行物理样机测试有危险、费时和成本高时,可利用虚拟样机进行分析和仿真*缩短产品的开发周期使用ADAMS建立虚拟样机非常容易。
利用CRUISE进行整车动力性经济性仿真计算

利用CRUISE进行整车动力性经济性仿真计算CRUISE是一种整车动力性和经济性仿真计算工具,它能够模拟汽车在不同速度、负载和运行条件下的动力性能和燃料经济性。
CRUISE使用了一种基于物理模型的方法,可以准确地预测汽车的加速性能、制动性能和燃油消耗率。
在这篇文章中,我将介绍CRUISE的基本原理和应用,并讨论如何利用它进行整车动力性和经济性仿真计算。
首先,让我们来了解一下CRUISE的基本原理。
CRUISE使用了一种模型将汽车的动力系统、传动系统和车辆动力学进行建模。
这个模型可以包括发动机、变速器、传动轴、差速器、车轮和车身等部件的详细信息。
通过这个模型,CRUISE可以根据不同的驾驶循环、载荷条件和车辆参数来预测汽车的动力性能和燃油经济性。
在进行仿真计算之前,我们首先需要输入一些关键信息,如发动机参数、传动系统参数和车辆参数。
发动机参数包括功率、扭矩和燃油消耗率等。
传动系统参数包括变速器的齿轮比和传动效率等。
车辆参数包括车辆的质量、风阻系数和轮胎滚动阻力等。
这些参数不仅可以从供应商提供的规格表中获取,还可以通过实验测试获得。
然后,我们可以选择一个具体的驾驶循环,比如城市驾驶循环、郊区驾驶循环或高速公路驾驶循环。
每个驾驶循环都有不同的速度和加速要求,因此会对汽车的动力性能和燃料经济性产生不同的影响。
CRUISE可以根据驾驶循环的速度和负载要求来模拟汽车的行驶过程,并计算出动力性能和燃料经济性。
在进行仿真计算之后,CRUISE会生成一系列与驾驶循环相关的结果。
这些结果包括加速时间、制动距离、燃油消耗量和能量利用率等。
通过分析这些结果,我们可以评估汽车在不同驾驶条件下的动力性能和燃料经济性,并提出改进的建议。
利用CRUISE进行整车动力性和经济性仿真计算可以带来很多好处。
首先,它可以帮助汽车制造商在产品设计阶段优化汽车的动力系统和传动系统,以提高汽车的动力性能和燃料经济性。
其次,它可以帮助汽车制造商评估不同驾驶条件下汽车的性能差异,并选择最适合特定驾驶循环的汽车配置。
AVL-Cruise-介绍

从数据文件中录入数据
拷贝与粘贴方式输入输出数据
道路环境和驾驶员模型的定义
可以自己定义道路环境,也可以默认CRUISE 给定的标准的道路模型
根据不同的驾驶员可以自由定义不同的操作特 性和习惯
驾驶员换挡过程
运算结果评价
选择不 同的子 任务单 可以查 看相应 的运算 结果
结果评价与分析
计算出的 发动机万 有特性图 及油耗概 率分布图
原地起步加速
从静止开始,汽车以起步档位迅速起步并 将油门踩到底,使汽车尽快加速行使, 当发动机达到该档位的最大功率转速时, 迅速换档,并相应将油门全开,直至最 高档最高车速的80%以上。
EQ4153 V-406八 档原地 起步特 性曲线
汽车爬坡试验分析
爬坡试验中一般是分析最低档的爬坡性能 在没有标准坡度时还要进行换算。 在CRUISE中可以计算出所有档位的爬坡 能力(不打滑的情况下所能爬的最大坡) 在Climbing Performance任务中完成
根据不同的给定计 算点可以算出相应 的燃油消耗
运行工况定义
不同档位不同 车速的燃油图
对排放的计算仿真
多工况下排放由Cycle run任务模块仿 真 而对限定条件下的排放由Cruising任务 模块来仿真, 但是对于整车来说,不管是油耗还是 排放都必须给定台架试验上发动机的油 耗和排放数据。
举例
Matlab®
/
TM Simulink
举例
目前的任务
第一阶段 通过与试验相结合,对软件计 算结果与试验结果进行对比性学习,调 整参数,积累经验。 第二阶段 指导设计阶段,对整车动力经 济性进行计算,用来指导设计
汽车燃料消耗量试验,GB/T 12545.2-2001
AVL_CRUISE_2019_整车经济性动力性分析操作指导书
A VL_CRUISE_2019_整车经济性动力性分析操作指导书AVL CRUISE纯电动汽车经济性动力性分析操作指导书目录第一章 AVL Cruise 2014 简介 (2)1.1 动力性经济性仿真集成平台 (2)1.2 A VL Cruise建模分析流程 (3)1.3 主要模块功能 (4)1.4 A VL Cruise计算任务的设定 (9)第二章汽车零部件模型建立 (14)2.1.软件启动 (14)2.2.Project创建 (15)第三章整车动力经济性分析模型连接 (44)3.1.部件之间物理连接 (44)3.2.部件之间信号连接 (45)第四章整车动力经济性分析任务设置 (49)4.1 爬坡性能任务制定 (50)4.2 等速百公里油耗分析 (53)4.3 最大车速分析 (56)4.4 循环工况油耗分析 (59)4.5 加速性能任务制定 (62)第五章计算及分析处理 (65)5.1. 计算参数设置 (65)5.2. 分析处理 (65)第六章整车动力性/经济性计算理论 (71)6.1 动力性计算公式 (71)6.1.1 变速器各档的速度特性 (71)6.1.2 各档牵引力 (71)6.1.3 各档功率计算 (72)6.1.4 各档动力因子计算 (72)6.1.5 最高车速计算 (72)6.1.6 爬坡能力计算 (73)6.1.7 最大起步坡度 (74)6.1.8 加速性能计算 (74)6.1.9 比功率计算 (76)6.1.10 载质量利用系数计算 (76)6.2 经济性计算公式 (76)6.2.1 直接档(或超速档)等速百公里油耗计算 (76)6.2.2 最高档全油门加速500m的加速油耗(L/500m) (77)6.2.3 循环工况百公里燃油消耗量 (78)第一章 AVL Cruise 2014 简介1.1 动力性经济性仿真集成平台AVL Cruise是AVL公司开发一款整车及动力总成仿真分析软件。
AVL_CRUISE软件
AVL CRUISE—车辆动力学仿真分析平台AVL CRUISE 软件可以轻松实现对复杂车辆动力传动系统的仿真分析,通过其便捷通用的模型元件,直观易懂的数据管理系统以及基于工程应用开发设计的建模流程和软件接口,AVLCRUISE软件已经成功的在整车生产商和零部件供应商之间搭建起了沟通的桥梁。
软件的主要特点简述如下:1.便捷的建模方法和模块化的建模手段使得不同项目组可以对模型进行方便快捷的整合。
可以快速搭建各种复杂的动力传动系统模型,可同时进行正向或逆向仿真分析;2.可以实现对车辆循环油耗(针对不同的循环工况),等速油耗(任意档位和车速下),稳态排放,最大爬坡度(考虑驱动防滑),最大牵引力(牵引功率),最大加速度,最高车速,原地起步连续换档加速,超车加速性能(直接档加速性能),车辆智能巡航控制,制动/反拖/滑行等一系列车辆性能的计算分析;3.CRUISE软件与AVL BOOST软件的耦合仿真可以实现对发动机瞬态特性的仿真分析;与FLOWMASTER软件或KULI软件的耦合仿真可以实现车辆热管理系统(VTMS)的设计及仿真分析;4.在基于传统车辆模型的基础上可以快速搭建纯电动汽车或混合动力车辆模型,并可通过与Matlab(API,DLL,Interface)或C(BlackBox)语言的接口实现整车控制策略的设计开发;能够便捷的对新型动力传动模式(AT,AMT,DCT,CVT 等)及其控制策略进行研究分析;5.内置Function函数,兼容C语言的程序格式,使用户在不需要第三方程序的前提下便捷的进行相关控制策略的设计和开发;6.根据预先设定的动力性、经济性或排放性指标,可以对模型中的参数进行快速优化组合,并可以对动力传动系统进行匹配优化(DOE参数化研究和多动力总成匹配研究);7.采用与Oracle对接的数据库管理体系,便于进行系统的管理和资源分配,提高了数据管理的安全性,同时方便实现CRUISE 软件不同使用群体之间的数据交换和数据读取;强大的数据搜寻和对比功能,使用户在面对大量的数据的情况下可根据自己设定的边界条件便捷的进行数据的获取和对比;8.可以与硬件系统(如:AVL In-Motion,dSPACE,ETAS等)进行联合仿真,满足用户对于车辆系统动态实时(Real Time)仿真分析的需求;可对动力总成及其相关联的ECU控制策略进行分析和调试,实现车辆动力学的快速原型开发(RCP)和硬件在环仿真功能(HIL),极大的提高了开发效率并缩短了开发流程;9.提出了动力总成分层建模的方法,可以将动力总成的不同元件搭建在用户自己设定的不同层中,使得建模过程更加直观和便捷,可独立对动力总成中某一部件进行仿真分析(无须搭建整个车辆模型),极大的降低了对于车辆建模所需参数的要求;可根据用户自定义的目标参数,对驾驶员模型进行系统优化分析;10.通过与AVL DRIVE以及IPG CarMaker的联合仿真可以进行包括:牵引力控制,制动稳定性分析,行驶平顺性以及换档品质评价等方面的仿真分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
整车性能计算软件该软件提供汽车五大性能:动力性、燃油经济性、制动性、操纵稳定性、平顺性、通过性、安全性、舒适性、环保性,可靠性的设计计算和报表输出功能。
适合于各种车型的设计计算。
1.汽车动力性计算动力性是汽车最基本、最重要的性能之一,汽车首先是一种高效率的运输工具,动力性决定了运输效率的高低。
为全面反映汽车动力性能,本软件中汽车的动力性计算包括以下评价指标:(1)最高车速;(2)最大动力因数;(3)最大爬坡度;(4)0-100km/h加速时间;(5)原地起步加速通过400m时间;(6)直接档30km/h加速到100km/h时间;(7)直接档30km/h加速行驶400m时间。
输出以下图表:(1)驱动力-阻力平衡图;(2)动力因数图;(3)功率平衡图;(4)加速度图;(5)爬坡度图;(6)原地起步换档加速曲线;(7)直接档加速曲线。
并可计算空载和满载两种不同工况。
2. 汽车燃油经济性计算汽车在一定的行驶条件下,以消耗最少的燃油完成单位运输工作的能力称为其次的燃油经济性。
它是评价汽车系统性能的主要参数之一。
结合汽车的实际使用工况,本软件系统选用以下指标来评价燃油经济性:(1)等速百公里油耗;(2)城市客车四工况循环油耗;(3)客车六工况循环油耗。
可计算空载和满载两种不同工况。
3. 汽车制动性计算汽车行驶时能在短距离内停车且维持行驶方向稳定性和在下长坡时能维持一定车速的能力称之为汽车的制动性。
汽车的制动性能是非常重要的,它是汽车安全行驶的重要保障。
本系统选用以下指标来综合评价汽车的制动性:(1)同步附着系数;(2)制动距离;(3)理想的前后制动力分配曲线;(4)附着效率曲线;(5) ECE法规制动分配曲线;4. 汽车操纵稳定性计算汽车的操纵稳定性是指在驾驶者不感到过分紧张、疲劳的条件下,汽车能遵循驾驶者通过转向系及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。
操稳性不仅影响到汽车驾驶的操纵方便程度,而且也是决定高速汽车安全行驶的一个主要性能。
本系统中操纵稳定性计算的内容如下:A.瞬态响应角阶跃输入下汽车横摆角速度瞬态响应曲线;包括以下指标:(1)固有圆频率;(2)阻尼比;(3)反应时间;(4)峰值反应时间;B.稳态响应(1)稳态横摆角速度增益曲线(转向灵敏度);(2)前后轮侧偏角绝对值之差-侧向加速度曲线;(3)转向半径比值-速度平方曲线;包括以下指标:* 稳定性因数;* 静态储备系数;* 转向结论;5. 汽车平顺性计算汽车的平顺性反应汽车的舒适程度,是现代汽车非常重要的性能之一。
本系统采用加权加速度均方根值来评价平顺性。
6.汽车匹配性计算汽车设计过程中,初步选择参数以后,可拟定供选用的参数数值的范围,进一步具体分析计算不同参数匹配下汽车的燃油经济性与动力性,然后综合考虑各方面的因素,最终确定动力装置的参数。
通常以循环工况油耗Q(单位为L/100km)代表燃油经济性,以原地起步加速时间代表动力性,作出不同参数匹配下的燃油经济性——加速时间曲线,并根据此曲线确定参数。
本系统汽车参数匹配包括以下内容:(1)动力系总成(发动机、变速箱、主减速器)匹配。
(2)车轮半径匹配。
1. 概述1.1 整车总布置设计的任务(1) 从技术先进性、生产合理性和使用要求出发,正确选择性能指标、质量和主要尺寸参数,提出总体设计方案,为各部件设计提供整车参数和设计要求;(2) 对各部件进行合理布置和运动校核;(3) 对整车性能进行计算和控制,保证汽车主要性能指标实现;(4) 协调好整车与总成之间的匹配关系,配合总成完成布置设计,使整车的性能、可靠性达到设计要求。
1. 2 设计原则、目标(1)汽车的选型应根据汽车型谱、市场需求、产品的技术发展趋势和企业的产品发展规划进行。
(2)选型应在对同类型产品进行深入的市场调查、使用调查、生产工艺调查、样车结构分析与性能分析及全面的技术、进行分析的基础上进行(3)应从已有的基础出发,对原有车型和引进的样车进行分析比较,继承优点,消除缺陷,采用已有且成熟可靠的先进技术与结构,开发新车型。
(5)涉及应遵守有关标准、规范、法规、法律,不得侵犯他人专利。
(6)力求零件标准化、部件通用化、产品系列化。
1. 3 汽车设计过程(1)调查研究与初始决策:选定设计目标,并制定产品设计工作及方针原则。
(2)总体方案设计:根据所选定的目标及对开发目标制定的工作方针、设计原则等主导思想提出整车设想,即概念设计(concept design)或构思设计。
(3)绘制总布置草图,确定整车主要尺寸、质量参数与性能以及各总成的基本形式。
(4)车身造型设计及绘制车身布置图:绘制不同外形、不同色彩的车身外形图;制作相应的造型的1:5整车模型;从中选优后,再制作1:5或1:1的精确模型。
(5) 编写设计任务书;(6) 汽车总布置设计;(7) 总成设计;(8) 试制、试验、定型。
2.整车型式的选择根据设计原则,目标和用户的需求特点,整车设计人员要提出被开发车型的整车型式方案,主要包括以下几部分:(1)发动机的种类和型式;(2)轴数和驱动型式;(3)车头和驾驶室的型式及与发动机、前轴(轮)的位置关系;(4)轮胎的选择。
2.1发动机的种类和型式对于发动机的种类和型式,在现代汽车上主要选用汽油机和柴油机,燃用其它燃料或其它种类的发动机,可根据车型的需要进行选取。
发动机的型式有直列式、V型和对置式等。
冷却方式有水冷和风冷。
因此要根据具体车型的使用条件和布置上的结构需要,而选择不同种类和型式的发动机。
2.2汽车的轴数和驱动型式不同类型的汽车有不同的轴数和驱动型式,这主要根据使用条件、用途、工厂的生产条件、制造成本及公路的轴荷限值等因素进行选择。
最常用的是两轴、后驱动4×2式汽车,其中轿车还可以采用4×2前驱动式结构。
对于一般总重小于 19t的汽车,都采用4×2后驱动的布置型式(前驱动的轿车除外),因为这种汽车结构简单、布置合理、机动性好、成本低、适合于公路使用,是—种典型的、成熟的结构型式。
随着汽车载重量的增加,各相关总成也要相应的加大,汽车的自重也要增加,这样会造成4×2式的汽车单轴的负荷增加,以致于超过公路、桥梁所规定的承载限值(公路允许单轴负荷为13t,双后轴负荷为24t)。
为解决此矛盾,一般采用增加汽车轴数的办法来减少单轴的负荷,如从4×2变成6×2、6×4、8×4,如果想增加驱动能力,提高越野通过性能,可以采用4×4、6×6、8×8等增加前驱动型式的结构,同时也可提高载重量。
采用增加轴数的办法,可以提高载重量而不增加单轴负荷,同时还不会增加车箱底板的离地高度,提高通用化、系列化水平,便于生产、降低生产成本等。
所以汽车厂家多年来一直都采用这种办法变型出更多品种的汽车。
6×2式结构可以由单前轴、单后驱动桥和后支承轴组成,也可由双前轴和单后驱动桥组成,这主要取决于布置需求和轴荷分配。
但应尽量不采用双前轴式结构,因为这样会使前转向系统复杂,转向沉重或增加转向助力系统,增加成本和影响操作。
2. 3车头、驾驶室的型式车头、驾驶室的型式是汽车的最主要的型式之一。
其选择主要决定于用户的要求、安全性、维修保养的方便性和生产条件等因素。
车头的型式如长头、平头、凸头等都各有其优缺点。
车头、驾驶室与发动机,前轴(前轮胎)的布置位置,也可组成不同的布置结构,形成不同风格的整车外形,当然对使用、性能也有—定的影响,所以对此要认真地进行选择。
2.4轮胎的选择轮胎的尺寸和型号是进行汽车性能计算和绘制总布置图的重要原始数据之一,因此,在总体设计开始阶段就应选定,而选择的依据是车型、使用条件、轮胎的静负荷、轮胎的额定负荷以及汽车的行驶速度。
当然还应考虑与动力—传动系参数的匹配以及对整车尺寸:参数(例如汽车的最小离地间隙、总高等)的影响。
轮胎所承受的最大静负荷与轮胎额定负荷之比,称为轮胎负荷系数。
大多数汽车的轮胎负荷系数取为0.9~1.0,以免超载。
轿车、轻型客车及轻型货车的车速高、轮胎受动负荷大,故它们的轮胎负荷系数应接近下限;对在各种路面上行驶的货车,其轮胎不应超载小对在良好路面上行驶且车速不高的货车,其轮胎负荷系数可取上限甚至达1.1;对车速不1高的重型货车、重型自卸汽车,此系数亦可偏大些。
但过多超载会使轮胎早期磨损,甚至发生胎面剥落及爆胎等事故。
试验表明:轮胎超载20%时,其寿命将下降30%左右。
为了提高汽车的动力因数、降低汽车及其质心的高度、减小非簧载质量,对公路用车在其轮胎负荷系数以及汽车离地间隙允许的范围内应尽量选取尺寸较小的轮胎。
采用高强度尼龙帘布轮胎可使轮胎的额定负荷大大提高,从而使轮胎直径尺寸也大为缩小。
例如装载量4t的载货汽车在20世纪50年代多用的9.00—20轮胎早已被8.25—20;7.50—20甚至8.25—16等更小尺寸的轮胎所取代。
越野汽车为了提高在松软地面上的通过能力常采用胎面较宽、直径较大、具有越野花纹的超低压轮胎。
山区使用的汽车制动频繁,制动鼓与轮辋之间的间隙应大一些,以便散热,故应采用轮辋尺寸较大的轮胎。
轿车都采用直径较小、断面形状扁平的宽轮辋低压轮胎,以便降低质心高度,改善行驶平顺性、横向稳定性、轮胎的附着性能并保证有足够的承载能力。
我国各种汽车的轮胎和轮辋的规格及其额定负荷可查相应的国家标准。
轿车轮胎标准见GB 2978—82;货车和客车的轮胎规格详见国标GB516—82。
货车的后轮装双胎时,比单胎使用时的负荷可增加10%~15%。
3.主要“目标参数”的确定总布置设计人员应初步确定以下各种参数,作为整车和总成的原始数据和工作目标。
在整车的方案(车头、驾驶室的型式、发动机的种类,整车初步的外廓尺寸、主要布置参数和布置草图)初步确定之后,整车设计人员通过图面工作和计算、初步确定如下目标参数:(1) 汽车主要尺寸参数(2) 汽车质量参数(3) 主要性能参数(4) 汽车的机动性参数(5)估算发动机的最大功率、最大扭矩及其对应的转速。
(6)变速器的头档速比和档位数,分动器速比和驱动桥的主减速比。
3.1汽车主要尺寸参数确定通过整车总布置草图的绘制,可以初步确定各总成的布置关系,进而确定整车各有关的(布置)尺寸参数和质量参数,以便为总成设计提供原始数据。
在绘制整车总布置草图时,可以参考同类车型的相关总成的外廓尺寸和质量,按本车的总布置需要,进行总布置草图的绘制。
初步确定主要布置尺寸和进行质量参数的计算。
确定车头,驾驶室的型式,以及同发动机、前轴(轮)的相互布置关系后,绘制布置总布置草图,并在此基础上布置各大总成。
(1)车架和车箱;(2)后簧、后桥和车轮;(3)前簧、前轴和车轮;(4)传动系;(5)转向机构及拉杆系统,并确定前轮转角和进行转弯直径的计算;(6)布置油箱、电瓶、消声器、贮气简.及备胎等其它总成。