零零狗机器人舵机控制板与舵机控制软件使用教程_调试环境建立
舵机(servo motor)的控制
舵机(servo motor)的控制基于单片机16f877a和proteus的仿真舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
(注意:如果你控制的舵机在不停的抖动,其中一个原因就是你给的脉冲有杂波,这点很重要。
舵机是一个物理器件,它的转动需要时间的,因此,程序中占空比的值变化不能太快,不然舵机跟不上程序的响应时间。
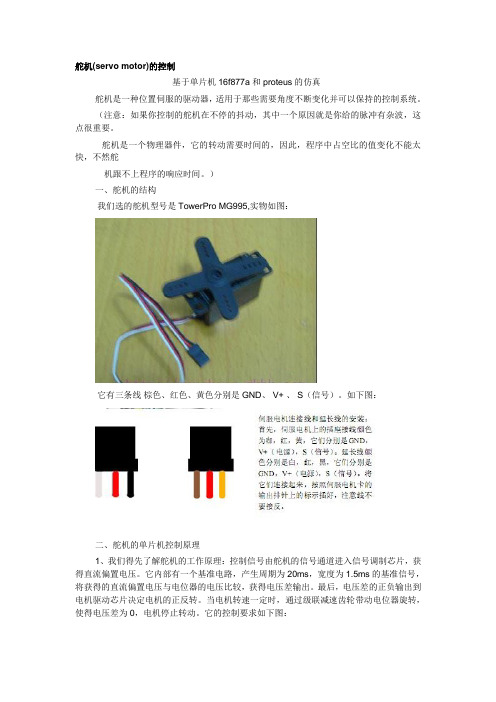
)一、舵机的结构我们选的舵机型号是TowerPro MG995,实物如图:它有三条线棕色、红色、黄色分别是GND、 V+ 、 S(信号)。
如下图:二、舵机的单片机控制原理1、我们得先了解舵机的工作原理:控制信号由舵机的信号通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
它的控制要求如下图:2、由上可知舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。
我们用pic单片机的定时器1模块产生PWM信号,得到控制电机的占空比,也就如上图的占空比信号,周期是20Ms.下面我们来看看怎样产生上图的占空比,单片机的定时器1模块最大可以产生174ms的延时,也就是可以产生最大174ms的中断。
怎样设置Timer1来产生上述占空比的中断,可以参考具体资料书。
当系统中只需要实现一个舵机的控制,采用的控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断。
这样既节省了硬件电路,也减少了软件开销,控制系统工作效率和控制精度都很高。
具体的设计过程:例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为20ms-2ms=18ms,所以开始时在控制口发送高电平,然后设置定时器在2ms 后发生中断,中断发生后,在中断程序里将控制口改为低电平,并将中断时间改为18ms,再过18ms进入下一次定时中断,再将控制口改为高电平,并将定时器初值改为2ms,等待下次中断到来,如此往复实现PWM信号输出到舵机。
舵机原理应用和程序详解
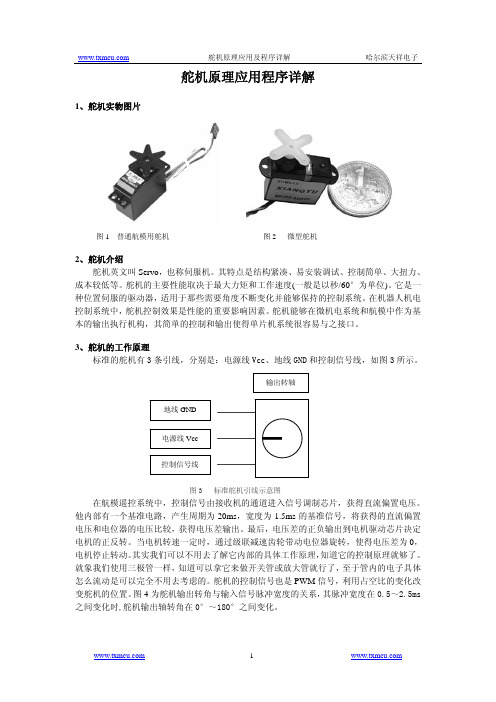
图 2 微型舵机
2、舵机介绍 舵机英文叫 Servo,也称伺服机。其特点是结构紧凑、易安装调试、控制简单、大扭力、
成本较低等。舵机的主要性能取决于最大力矩和工作速度(一般是以秒/60°为单位)。它是一 种位置伺服的驱动器,适用于那些需要角度不断变化并能够保持的控制系统。在机器人机电 控制系统中,舵机控制效果是性能的重要影响因素。舵机能够在微机电系统和航模中作为基 本的输出执行机构,其简单的控制和输出使得单片机系统很容易与之接口。
1
舵机原理应用及程序详解
输入信号脉冲宽度(周期为 20ms)
0.5ms
哈尔滨天祥电子 舵机输出轴转角
0度
1ms
45 度
1.5ms
90 度
2ms
135 度
2.5ms
180 度
图 4 舵机输出转角与输入信号脉冲宽度的关系
4、用单片机实现舵机转角控制 单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的
//判断0.5ms次数是否小于角度标识 //确实小于,PWM输出高电平
else
pwm=0; count=(count+1);
//大于则输出低电平 //0.5ms次数加1
count=count%40;
//次数始终保持为40 即保持周期为20ms
} void keyscan()
//按键扫描
{
if(jia==0)
单片机控制单个舵机是比较简单的,利用一个定时器即可,假设仅控制舵机 5 个角度转 动,其控制思路如下:只利用一个定时器 T0,定时时间为 0.5ms,定义一个角度标识,数值 可以为 1、2、3、4、5,实现 0.5ms、1ms、1.5ms、2ms、2.5ms 高电平的输出,再定义一个 变量,数值最大为 40,实现周期为 20ms。每次进入定时中断,判断此时的角度标识,进行 相应的操作。比如此时为 5,则进入的前 5 次中断期间,信号输出为高电平,即为 2.5ms 的 高电平。剩下的 35 次中断期间,信号输出为低电平,即为 17.5ms 的低电平。这样总的时间 是 20ms,为一个周期。
零零狗机器人舵机控制板与舵机控制软件使用教程_调试环境建立
编者寄语:参考本教程进行操作前,请认真研读本注意事项,否则由于错误操作导致的任何问题,包含机器人硬件损坏、电脑硬件损坏、人员伤亡(我们不排除由于某个芯片烧毁导致某些人心脏病复发这类蝴蝶效应的发生)等,与本人以及相关硬件与软件无关,损失自负。
总之,我写这份教程的最终目的是为了让大家更好的上手机器人调试,为大家解决问题。
希望大家本着负责任的态度学习此教程,预祝大家都可以在比赛中获得更好的成绩!注意事项:1.连接舵机与舵控板前,请关闭机器人电源并断开机器人与电脑的USB连接。
2.使用电脑调试机器人时,当打开串口后,请勿在关闭串口前断开机器人与电脑之间的USB连接,否则会导致软件崩溃。
3.舵机控制线不要反接,调试过程中不要让舵机卡死,否则很容易烧毁舵机(随便说一下,所谓的调试经验:耐心、细心、仔细、一定的专业知识,长时间的调试的经验积累,通过视频或者现场向高手学习,调试过程中烧毁一些硬件设备,我们已经习以为常了,即使是高手也会出现错误,我们要避免低级错误,但是我们也不能停下创新的脚步)4.不要在上电的情况下用手触碰舵机控制板,最好对舵机控制板进行一些绝缘处理(热熔胶和绝缘漆是不错的选择,当然也要注意散热问题),机器人上有很多金属件,很容易在运动过程中造成短路。
5.控制器硬件以及软件将不断更新,修复其中的BUG,也感谢大家将调试中出现的问题反馈给我。
(本人邮箱:745312673@)6.有很多使用者向我反馈,电脑的硬件驱动不能识别(之前我们以对XP的32位系统,XP英文版64位系统(国内未发行),win7的32位系统与64位系统,win8的32位系统与64位系统进行过完整的测试,不存在软件兼容问题),可能是控制板硬件的固件没有升级,如果不是上述原因的话,我只能建议你重装系统了,我自己也重装过,win7 64位sp1补丁旗舰版。
重装系统是最快最有效的解决方法!我也正在尝试找到其中的原因,希望大家谅解。
7.调试机器人的时候常常会出现螺丝松动,请及时紧固相关松动的螺丝,否则一颗松动的螺丝将会在调试或者比赛中导致意想不到的灾难。
舵机的使用方法
舵机的使用方法
1. 确认舵机的电源和控制信号线。
舵机一般有电源正极、负极
和控制信号线三根线,其中红线为正极,接到电源正极,黑线为负极,接到电源负极,控制信号线一般为白、橙、黄三种颜色,需通过控制
器或开发板来控制舵机转动。
2. 连接舵机到控制器或开发板。
将舵机的控制信号线插入到控
制器或开发板的对应的GPIO口上,并将电源的正负极连接到电源模块上。
3. 写代码进行控制。
使用代码控制舵机转动,可以通过改变PWM 脉宽的大小,更改需要转动的角度和速度等参数来实现不同的舵机控
制方式。
舵机的基本操作是通过一个信号脉冲来控制,这个脉冲的宽
度即为PWM的脉宽,脉冲的周期一般为20ms。
舵机的控制范围一般为
0到180度,有些高级舵机还支持连续旋转等特殊功能。
4. 调试测试。
在编写代码过程中,可以通过串口监视器或者其
他调试工具来查看舵机转动的情况,进行参数微调和测试,直到舵机
达到预期效果。
舵机控制教程
舵机控制教程Title: A Tutorial on Servo Motor ControlChapter 1: IntroductionIntroduction to Servo Motors- Definition and functionality of servo motors- Applications of servo motorsChapter 2: Working Principle of Servo Motors Components of Servo Motors- DC motor- Control circuit- Feedback systemWorking Mechanism- Position control- Speed control- Torque controlChapter 3: Controlling Servo MotorsUnderstanding PWM (Pulse Width Modulation)- Definition and working principle- PWM frequency and duty cycleConnecting Servo Motors to Microcontrollers- Pin configurations- Power supply requirementsProgramming Servo Control- Initializing PWM output- Setting pulse width for desired position- Adjusting parameters for speed and torque control- Handling servo motor signals for smooth motor movementChapter 4: Tips for Efficient Servo Motor ControlCalibrating Servo Motors- Mapping servo positions to PWM pulse widths- Determining servo motor range- Fine-tuning servo motor movements- Correcting for non-linearityMinimizing Electrical Noise and Interference- Grounding techniques- Shielding servo and control wires- Using external filtersOptimizing Power Supply- Adequate voltage and current requirements- Reducing voltage drops and fluctuations- Considering power supply capacitorsImplementing Safety Measures- Using limit switches- Overcurrent and overheat protection- Error handling in control programsConclusion- Recap of servo motor control basics- Importance of accurate calibration and proper electrical setup for effective servo motor control- Potential future developments and advancements in servo motor technologyIn this tutorial, we have covered the basic principles of servo motor control, including their components, working mechanisms, and how to control them using Pulse Width Modulation (PWM). Wealso discussed the importance of calibrating servo motors, minimizing electrical noise, optimizing power supply, and implementing safety measures. By following this guide, readers should have a solid understanding of servo motor control and be able to apply it to their own projects.如何有效处理学习压力?在现代社会中,学习压力已成为许多人的普遍现象。
舵机基本控制方法

舵机基本控制⽅法控制任务
舵机的位置控制
电路设计
见下图
程序设计
1 #include <Servo.h> //舵机驱动头⽂件
2 Servo myservo; // 定义舵机对象
3int pos = 0; // 定义舵机初始位置
4
5void setup()
6 {
7 myservo.attach(9); // 设置舵机控制针脚
8 }
9
10void loop()
11 {
12for(pos = 0; pos < 180; pos += 1) // 0到180旋转舵机,每次延时50毫秒
13 {
14 myservo.write(pos);
15 delay(50);
16 }
17for(pos = 180; pos>=1; pos-=1) // 180到0旋转舵机,每次延时50毫秒
18 {
19 myservo.write(pos);
20 delay(50);
21 }
22 }
运⾏效果
舵机连续左右摆动近180度,循环
舵机控制原理
图1 微型舵机实物图
图2 舵机接线定义
图3 舵机位置控制原理
脉冲宽度在0.5ms 到2.5ms 之间时,与之对应的舵机转⾓为0°~180°。
注因为⽤到了舵机库函数,舵机信号线只能接控制板的9或11⼝。
舵机控制板使用说明
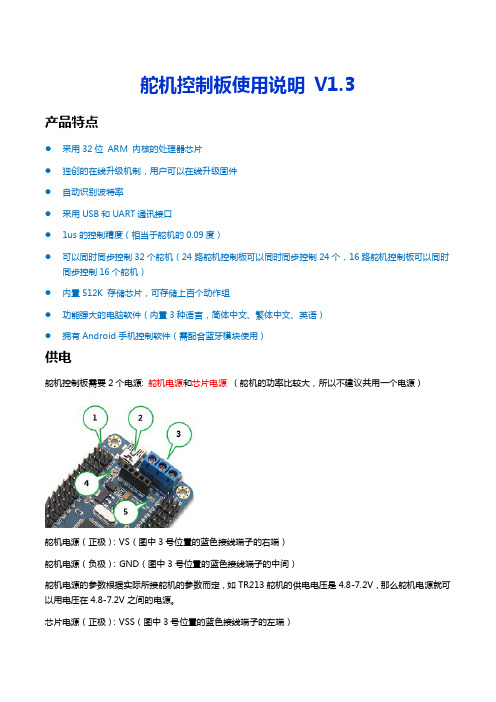
舵机控制板使用说明V1.3产品特点●采用32位ARM 内核的处理器芯片●独创的在线升级机制,用户可以在线升级固件●自动识别波特率●采用USB和UART通讯接口●1us的控制精度(相当于舵机的0.09度)●可以同时同步控制32个舵机(24路舵机控制板可以同时同步控制24个,16路舵机控制板可以同时同步控制16个舵机)●内置512K 存储芯片,可存储上百个动作组●功能强大的电脑软件(内置3种语言,简体中文、繁体中文、英语)●拥有Android手机控制软件(需配合蓝牙模块使用)供电舵机控制板需要2个电源: 舵机电源和芯片电源(舵机的功率比较大,所以不建议共用一个电源)舵机电源(正极):VS(图中3号位置的蓝色接线端子的右端)舵机电源(负极):GND(图中3号位置的蓝色接线端子的中间)舵机电源的参数根据实际所接舵机的参数而定,如TR213舵机的供电电压是4.8-7.2V,那么舵机电源就可以用电压在4.8-7.2V之间的电源。
芯片电源(正极):VSS(图中3号位置的蓝色接线端子的左端)芯片电源(负极):GND(图中3号位置的蓝色接线端子的中间)VSS的要求是6.5-12V,如果芯片供电是从VSS端口输入的,那么电源的电压必须是6.5-12V之间。
另外:1. 图中2号位置的USB接口可以给芯片供电,所以USB接口和VSS端口,任选其一即可。
2. 图中1号位置也可以给芯片供电,标记为5V和GND,5V是正极,GND是负极,供电电源的电压必须是5V。
3. 1234. 图中4号位置的绿色LED灯是芯片电源正常的指示灯,绿色灯亮,表示芯片供电正常,绿色灯灭,表示芯片供电异常。
5. 图中5号位置的绿色LED灯是舵机电源正常的指示灯,绿色灯亮,表示舵机供电正常,绿色灯灭,表示舵机供电异常。
2安装驱动驱动下载地址:/down/usc_driver.exe (全部是小写)直接双击usc_driver.exe ,点击下一步即可安装驱动。
Robo-Soul H3.0组装教程

Robo-Soul H3.0人形机器人安装教程机器人的整体安装调试包括4个步骤:1.在机器人安装之前,熟练舵机控制板的使用(非常重要!),关于舵机控制板的使用,请参考《24路舵机控制板使用教程》;2.机器人安装;3.舵机偏差调整,请参考《24路舵机控制板使用教程》和《机器人调试讲解视频教程》。
4.动作组导入或动作组调试,程序编程。
***********************************关于安装,我们从4个部分依次向您介绍:组合支架安装,腿部安装,手臂安装和躯干安装。
在安装机器人的时候,每个舵机我们都需要调到一个合适的初始位置,再进行安装。
所以在安装的时候,可以把电脑放在旁边,以方便舵机的调整。
另外,请自备好十字螺丝刀,有条件的话,还可以自己准备好M2的小扳手。
此款机器人的降压芯片,需要把电线接到芯片的引脚上,所以请大家自备好电烙铁及少许焊锡丝。
***********************************一、组合支架安装所谓组合支架,就是指把部分2个零散的单个支架装到一起,组合起来。
这样在机器人后续的安装中,可以更加直观的看出如何进行安装。
提高了安装效率,也降低了安装难度。
1)先装脚部的组合支架:取1个特U支架+1个大U支架。
2)将2个支架用M2*6螺丝和M2螺母固定好,共做2对。
如下图中1号方框部分所示。
在后面的安装过程中,我们将此款组合支架称作为1号组合支架。
3)取2个大U支架,固定好,共做2对。
如下图中2号方框部分所示。
在后面的安装过程中,我们将此款组合支架称作为2号组合支架。
4)取1个大U支架+1个小U支架,固定好,共做4对。
如下图中3号方框部分所示。
在后面的安装过程中,我们将此款组合支架称作为3号组合支架。
组装好这些组合支架以后,我们把组合支架和其他支架摆在一起,拼出来一个大致的机器人结构图,大家感受一下这些支架在机器人里面的大致位置。
***********************************二、腿部安装1)准备好2个脚板,要自己分清左脚和右脚。
舵机控制板使用说明V3torobot

舵机控制板使用说明V3.3规格参数1. 舵机电源和控制板电源分开,独立供电2. 控制通道:同时控制32 路。
(舵机速度可调)3. 通讯输入:USB 或者串口(TTL)4. 信号输出:PWM(精度0.5us)。
5. 舵机驱动分辨率:0.5us , 0.045 度。
6. 波特率范围:9600 19200 38400 57600 115200 128000。
7. 支持的舵机: Futaba 、 Hitec 、辉盛、春天,等市面上 98%以上的舵机8. PCB 尺寸:63.5mm×43.5mm。
9. 安装孔间距:55*35.5mm。
10.存储空间:板载16M U 盘。
1)供电说明本模块电源部分是分离设计的,控制板电源和舵机电源是分开供电的,这样不会相互干扰。
a)控制板电源VSSUSB 接口和蓝色端子中的 VSS 和 GND 都可以给控制板供电,两者任选一种即可。
(VSS 的供电范围是 6.5-12V)b)舵机电源VS舵机的供电情况是根据使用的舵机而定,可以查阅舵机的相关参数,若你不了解,可以使用5V 供电。
VS输入多少付电压,给舵机的就是多少付的电压,所以必须严格匹配舵机的电压参数舵机电源输入接口为蓝色接线端子中的 VS 和 GND。
(控制板电源和舵机电源中的GND 是共用的)常规舵机的电压参数MG995、MG996 供电电压为 4.8-6.8V TR213、TR223、1501MG 供电电压为 4.8-7V TR227 供电电压 4.8-7.2V未知舵机,请给 5V 供电(标准舵机 99%都可以用 5V 供电)如果供电电压超过舵机的范围,有可能造成舵机烧坏,或者烧坏舵机控制板。
请用户谨慎操作,查看舵机的相关参数。
舵机电源的其他说明请看 11 页。
2)安装驱动驱动下载地址:/down/usc_driver.exe (全部小写)直接双击 USC_driver.exe ,点击下一步即可安装驱动。
驱动安装过程中如果出现下面的提示,请选择“始终安装此驱动程序软件”。
舵机的使用方法

舵机的使用方法舵机是一种常用的电子元件,广泛应用于机器人、航模、船模等领域。
它通过接收控制信号来控制舵机的转动角度,从而实现对机械臂、舵面等部件的精确控制。
本文将介绍舵机的使用方法,包括舵机的连接、控制信号的发送和常见问题的解决。
一、舵机的连接舵机通常有三根线,分别是电源线、地线和控制信号线。
其中电源线用于连接舵机的供电源,地线用于连接电源的地线,控制信号线用于接收控制信号。
舵机的电源通常需要直流电压供应,常见的电压为5V或6V。
可以通过将电源线连接到电源模块或电池组来为舵机提供电源。
地线需要与电源的地线连接,以确保电路的闭合。
通常,地线可以直接连接到电源的负极或者控制板上的地线引脚。
控制信号线则需要接收控制信号,通常是一个PWM信号。
可以将控制信号线连接到控制板上的一个数字引脚,通过控制板发送PWM信号来控制舵机的转动角度。
二、控制信号的发送舵机的转动角度是由控制信号的脉冲宽度来决定的。
通常,一个周期的脉冲宽度为20ms,其中高电平的持续时间决定了舵机的转动角度。
舵机通常有一个工作范围,一般是0°到180°。
在这个范围内,舵机的转动角度与脉冲宽度之间有一个线性关系。
具体地,当脉冲宽度为1ms时,舵机会转到最小角度;当脉冲宽度为1.5ms时,舵机会转到中间位置;当脉冲宽度为2ms时,舵机会转到最大角度。
因此,要控制舵机的转动角度,只需要发送相应脉冲宽度的控制信号即可。
可以通过控制板上的PWM输出来发送控制信号,使用编程语言编写相应的代码来控制舵机的转动角度。
三、常见问题的解决在使用舵机的过程中,可能会遇到一些常见问题,下面介绍几种常见问题的解决方法。
1. 舵机不转动或转动异常:首先检查舵机的电源是否正常供电,确认电源线和地线连接正确。
然后检查控制信号线是否连接到正确的引脚上,并确保发送的控制信号正确。
2. 舵机转动角度不准确:检查控制信号的脉冲宽度是否正确,可以通过调整控制信号的宽度来校准舵机的转动角度。
roboguide安装教程
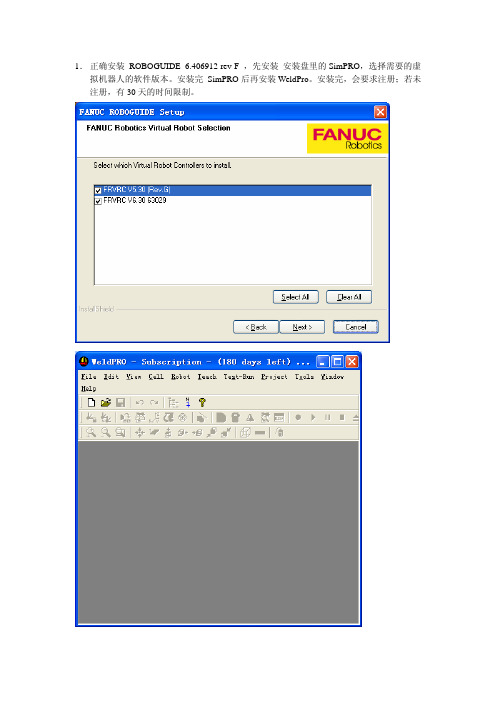
1.正确安装 ROBOGUIDE_6.406912 rev F ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。
安装完 SimPRO后再安装WeldPro。
安装完,会要求注册;若未注册,有30天的时间限制。
2.新建Workcell在Name 一栏输入文件名,文件名要以字母开头。
第一项是根据默认的配置新建;第二项是根据上次使用的配置新建;第三项是根据机器人备份文件来创建;第四项是根据已有机器人的拷贝来新建;一般都选用第一项。
选择机器人的软件版本:V6.** 是针对R-J3iB 控制器,V7.**是应用在R-J3iC控制器的。
现在销售的机器人都是R-J3iC控制器的。
选择机器人的应用软件:一般选用ArcTool ( H541 )选择合适的机型,如果选型错误,造成焊接位置达不到,可以在创建之后更改。
然后选择Group2 ~7的设备:该实例中选了两个Positioners ,如果没有类似设备,就无需在此页上做任何选择。
根据所需,选择相应的选项功能软件。
以下列出一些弧焊中常用的选项功能:1A05B-2500-H871 ARC Positioner FANUC二轴变位机1A05B-2500-J511 TAST Arc Sensor1A05B-2500-J518 Extended Axis Control 行走轴1A05B-2500-J526 AVC 弧压控制1A05B-2500-J536 Touch Sensing 接触传感1A05B-2500-J605 Multi Robot Control 多机器人控制,Dual Arm中用1A05B-2500-J601 Multi-Group Motion 多组控制,有变位机,必须选1A05B-2500-J617 Multi Equipment 多设备,Tamdem Mig中用1A05B-2500-J613 Continuous Turn 连续转,1A05B-2500-J678 ArcTool Ramping 焊接参数谐波变化1A05B-2500-J686 Coord Motion Package 变位机协调功能3.添加附加轴软件设置如果有附加轴(Positioner,Rail),则需要完成这一步。
x机器人实训项目2--舵机的调试与控制-(2)

实训项目二舵机的调试与控制一、实验目的1. 学习舵机控制原理2. 学习R/C舵机控制原理3. 学习CSD55XX舵机控制原理4. 学习舵机调试系统的使用5. 学习使用NorthStar编程控制舵机的运动二、实验要求(一)舵机的调试1. 通过舵机调试系统对单个舵机及多个串联舵机的ID进行设置。
2. 检验电机模式工作是否正常。
3. 检验舵机模式工作是否正常。
4. 将舵机转轴调整到中位。
5. 了解舵机的其他信息。
(二)舵机的控制1. 使用6个舵机,编号1~6。
2. 控制1号舵机快速正转3秒,然后慢速反转3秒后停止。
3. 同时控制1号2号舵机快速正转和3号4号舵机快速反转5秒,停止1秒后,1号2号舵机慢速反转和3号4号舵机慢速正转5秒,如此反复进行。
4. 同时控制1~4号舵机快速正转5秒,然后5号和6号舵机分别正向和反向转动90度,3秒钟后回复中位,1~4号舵机再慢速反转10秒,停止。
三、实验设备1. CSD55XX舵机,6个2. 多功能调试器,1个3. MultiFLEX 2-AVR控制器,1块4. 电源线、USB数据线,1套5. 舵机线,6根四、实验原理(一)CSD55XX舵机1. 引脚定义proMOTIOCDS 系列机器人舵机电气接口如下图,两组引脚定义一致的接线端子可将舵机逐个串联起来。
2. 舵机通讯方式CDS55xx采用异步串行总线通讯方式,理论多至254个机器人舵机可以通过总线组成链型,通过UART异步串行接口统一控制。
每个舵机可以设定不同的节点地址,多个舵机可以统一运动也可以单个独立控制。
CDS55xx的通讯指令集开放,通过异步串行接口与用户的上位机(控制器或PC机)通讯,您可对其进行参数设置、功能控制。
通过异步串行接口发送指令,CDS55xx可以设置为电机控制模式或位置控制模式。
在电机控制模式下,CDS55xx可以作为直流减速电机使用,速度可调;在位置控制模式下,CDS55xx拥有0-300°的转动范围,在此范围内具备精确位置控制性能,速度可调。
舵机控制软件使用说明

舵机控制软件使用说明一、驱动安装1、运行驱动程序文件夹下的CDM.exe文件,驱动所需的文件将自动复制到系统目录中。
2、连接控制板USB线,系统将自动识别,并且安装驱动程序。
3、安装好后会在生成一个虚拟的串口,串口号可以到设备管理器->端口找到。
二、软件使用1、端口打开舵机控制软件,如果前面的USB驱动安装正确,在端口下拉框中就会显示串口号COMxx(xx表示编号),选择好端口后按连接。
2、Box (每个BOX对应一路舵机)1、拖动Box里的滑竿,控制板的LED灯就会闪烁。
如果连上舵机(舵机供电也需要连上),舵机将跟随滑竿动作。
2、打开软件时,默认BOX将会分4行并排显示,并且BOX是不能被拖动的。
3、BOX手动布局单击“BOX布局设置->进入BOX编辑模式”进入BOX编辑模式。
在此模式下,可以拖动BOX位置、隐藏\显示BOX.隐藏\显示BOX单击对应的按钮,将可以隐藏\显示BOX。
4、BOX设置设置对话框。
单击BOX上的按钮,将弹出Box设置名称----BOX标题栏上显示的名字。
颜色----BOX外观颜色。
设置滑竿移动范围----用来限制BOX上滑竿可以移动的范围(可以有效防止调正动作中,超过一些舵机的极限值,造成对舵机的损伤)。
5、布局好所需的BOX后,点击“BOX布局设置->进入BOX编辑模式”后,将锁定BOX的位置。
单击“工程->保存”就可以保存BOX布局。
控制板是以动作组的方式来管理动作数据,最多可以管理128组,编号是0-127,每一组动作可以保存255步。
每一步至少要包含一路舵机,最多可以32路。
通过软件生成动作数据前,必须要先添加动作序列。
单击“动作序列->添加”后,将弹出动作组编号----就是下载到控制板,动作组的编号范围是0-127存储起始地址----动作下载到控制板存储器的起始地址。
起始地址不能低于256,不能高于65535-此组动作占用空间。
机器人舵机控制
机器人舵机控制第一章:引言机器人舵机控制在机器人技术领域中起着至关重要的作用。
随着科技的不断发展,人们对机器人应用的需求也越来越多样化和复杂化。
舵机作为机器人的关键控制组件之一,对机器人的运动精度和稳定性有着重要影响。
本篇论文将介绍机器人舵机控制的原理、方法以及应用。
第二章:机器人舵机控制原理2.1 舵机工作原理舵机是一种常用的电动装置,能够根据输入信号实现角度的精确控制。
其工作原理是通过接收信号,根据信号的脉冲宽度来控制舵机的角度位置。
通常,舵机通过PWM信号控制,调整信号的脉冲宽度可以实现舵机对应角度位置的精确控制。
2.2 常见舵机控制方法常见的舵机控制方法包括开环控制和闭环控制。
开环控制是指通过事先设定舵机的角度位置,直接发送相应的PWM信号给舵机。
这种控制方法简单、快速,但由于不考虑外界因素的干扰,容易导致角度偏差和运动不稳定等问题。
闭环控制是指通过引入反馈信号来实时调整舵机的角度位置。
舵机控制器通过与传感器的信息比较,计算控制误差,并发送相应的PWM信号来调整舵机的角度,从而实现精确控制。
闭环控制能够有效地抵御外界干扰,并实现更高的运动精度和稳定性。
第三章:机器人舵机控制方法3.1 PID控制PID控制是一种经典的闭环控制方法,在机器人舵机控制中得到广泛应用。
PID控制器根据当前状态和目标状态之间的误差,计算出控制信号,并发送给舵机。
PID控制方法包括比例控制、积分控制和微分控制,通过调整各个参数的权重,可以实现良好的控制效果。
3.2 自适应控制自适应控制是一种基于反馈信息的控制方法,能够根据外界变化自动调整控制策略。
在机器人舵机控制中,由于工作环境的不确定性,自适应控制方法能够实时感知舵机与环境之间的交互信息,从而调整控制参数,保证舵机的运动稳定性。
第四章:机器人舵机控制的应用4.1 机械臂控制机械臂作为机器人的重要组成部分,舵机在机械臂控制中起到了关键的作用。
通过对舵机的精确控制,可以实现机械臂的准确定位和运动轨迹规划,为机械臂应用提供了更广阔的空间。
舵机控制器上位机软件使用说明

舵机控制器上位机软件使用说明软件安装软件安装如下图所示,点击安装文件目录下setup.exe文件,按照弹出对话框提示点击相对应按钮即可。
安装完成后,在桌面生成DJCtrl快捷方式图标。
界面介绍安装成功后点击桌面DJCtrl快捷方式图标运行程序,界面如下图所示:菜单在菜单——文件中点击“串口设置”后弹出设置串口对话框,设置对应串口参数(除了“串口号”,其它参数默认即可),完成后点击“应用设置”和“退出”按钮,最后点击文件中“打开串口”,打开串口。
总控帧总控帧界面里可以设置各个控制器组件的给定值,填写完成后点击“确认数据”按钮(注:如果不点击该按钮,上述填写的值无效),点击“启动”按钮主机执行每50ms发送一次总控帧操作,点击“单次发送”按钮主机执行一次总控帧发送操作。
单控帧在各文本框中填写对应信息,点击“确认按钮”后,点击“启动”按钮主机执行每50ms发送一次单控帧操作,点击“单次发送”按钮主机执行一次总控帧发送操作。
页面右侧显示返回的状态帧信息,如果没有返回状态帧,会弹出对话框提示。
查询帧在对应文本框中填写对应信息,点击“发送”按钮,主机执行一次查询帧发送操作,页面右侧显示返回的状态帧信息,如果没有返回状态帧,会弹出对话框提示。
静默帧在对应文本框中填写对应信息,点击“发送”按钮,主机执行一次静默帧发送操作。
启动帧在对应文本框中填写对应信息,点击“发送”按钮,主机执行一次启动帧发送操作,页面右侧显示返回的状态帧信息,如果没有返回状态帧,会弹出对话框提示。
地址注入帧在对应文本框中填写对应信息,点击“发送”按钮,主机执行一次地址注入帧发送操作。
参数注入帧在对应文本框中填写对应信息,按顺序点击“确认数据”和“发送”按钮,主机执行一次参数注入帧发送操作,页面右侧显示返回的状态帧信息,如果没有返回帧,会弹出对话框提示。
参数读取命令帧在对应文本框中填写对应信息,点击“发送”按钮,主机执行一次参数读取帧发送操作,页面右侧显示返回的参数数据帧信息,如果没有返回帧,会弹出对话框提示。
舵机的使用方法

舵机的使用方法
舵机是一种常见的电机,它可以控制机器人、模型车、飞机等设备的运动方向和角度。
舵机的使用方法非常简单,只需要按照以下步骤进行操作即可。
第一步,连接电源和控制器。
舵机需要接受电源供电,一般使用直流电源,电压范围为4.8V-6V。
同时,舵机还需要连接控制器,控制器可以是单片机、遥控器等,用于控制舵机的运动。
第二步,设置舵机的初始位置。
在使用舵机之前,需要将舵机的初始位置设置为中心位置,这样可以保证舵机在运动时不会出现偏差。
设置初始位置的方法是将舵机连接到控制器上,然后将控制器的输出信号设置为中心位置,即舵机不运动的位置。
第三步,控制舵机的运动。
在设置好初始位置后,就可以控制舵机的运动了。
控制舵机的运动需要通过控制器来实现,控制器会向舵机发送控制信号,舵机根据信号的大小和方向来运动。
舵机的运动范围一般为0-180度,可以根据需要进行调整。
第四步,调整舵机的运动速度。
舵机的运动速度可以通过控制器来调整,一般可以设置舵机的运动速度和加速度。
调整舵机的运动速度可以使其更加平稳,避免出现抖动或者过快的运动。
第五步,保养舵机。
舵机在长时间使用后,可能会出现故障或者损坏,因此需要进行定期保养。
保养舵机的方法包括清洁舵机、润滑
舵机、检查舵机的连接线等。
舵机的使用方法非常简单,只需要按照以上步骤进行操作即可。
在使用舵机时,需要注意安全问题,避免出现电路短路、过载等情况。
同时,还需要根据实际需要进行调整,使舵机的运动更加精准、平稳。
2.使用说明

舵机控制板使用说明V3.0规格参数1. 舵机电源和控制板电源分开,独立供电2. 控制通道:同时控制 16 路。
(24路舵机控制板可以控制24路)(舵机速度可调)3. 通讯输入:USB 或者串口(TTL)4. 信号输出:PWM(精度 0.5u s)。
5. 舵机驱动分辨率:0.5us , 0.045 度。
6. 波特率范围:9600 19200 38400 57600 115200 128000。
7. 支持的舵机: Futaba 、 Hitec 、辉盛、春天,等市面上98%以上的舵机8. PCB 尺寸:63.5mm×43.5mm。
9. 安装孔间距:51*43.5mm。
10.存储空间:512k。
1)供电说明本模块电源部分是分离设计的,控制板电源和舵机电源是分开供电的,这样不会相互干扰。
a)控制板电源VSSUSB 接口和蓝色端子中的 VSS 和 GND 都可以给控制板供电,两者任选一种即可。
(VSS 的供电范围是 6.5-12V)b)舵机电源VS舵机的供电情况是根据使用的舵机而定,可以查阅舵机的相关参数,若你不了解,可以使用5V 供电。
VS 输入多少付电压,给舵机的就是多少付的电压,所以必须严格匹配舵机的电压参数舵机电源输入接口为蓝色接线端子中的 VS 和 GND。
(控制板电源和舵机电源中的GND 是共用的)常规舵机的电压参数MG995、MG996 供电电压为 4.8-6.8V TR213、 TR223、1501MG 供电电压为 4.8-7V TR227 供电电压 4.8-7.2V未知舵机,请给 5V 供电(标准舵机 99%都可以用 5V 供电)如果供电电压超过舵机的范围,有可能造成舵机烧坏,或者烧坏舵机控制板。
请用户谨慎操作,查看舵机的相关参数。
舵机电源的其他说明请看倒数第二页。
2)安装驱动驱动下载地址:/down/usc_driver.exe (全部小写)直接双击 USC_driver.exe ,点击下一步即可安装驱动。
舵机板说明书
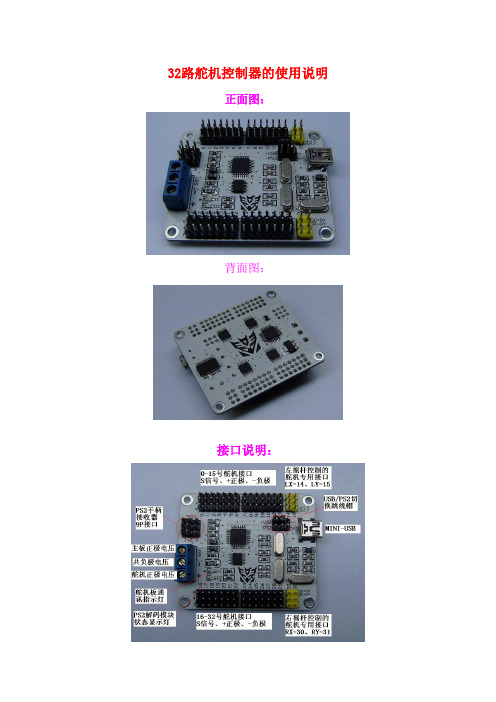
32路舵机控制器的使用说明正面图:背面图:接口说明:1、安装驱动使用MINI-USB线连接上舵机板找到以下的驱动,这里可跳过安装然后打开QSC-32E(PL2303)驱动文件夹双击PL2303 Driver 来手动安装驱动程序如果是WIN7系统需要进行如下操作:鼠标右键单击此文件选择属性弹出如下窗口:然后选择兼容性窗口再这里的用兼容性模式运行这个程序打上勾再下拉窗口中选择WINXP,我这里使用的本身已经是WINXP系统所以无此选项使用者选择WINXP即可然后点击确定退出该窗口然后重新双击驱动软件便可在WIN7模式下用兼容模式安装WINXP的驱动程序2、安装 Framewoks2.0,如果已经安装了或者有高版本的NetFramewoks 文件可跳过安装,如果没有安装这个文件则打不开上位机软件,如果能直接打开上位机软件则可不安装此文件。
WIN7或以上操作系统可直接跳过安装。
3.上位机软件说明左边为舵机图标操作窗口,打钩显示该舵机口、取消就关闭该舵机口右边为舵机图标位置保存窗口,舵机图标可自由拖拉,拖拉后保存位置舵机图标窗口,可自由拖拉如下人形的图标窗口,然后保存位置保存的位置一定要跟上位机软件QSC舵机控制器同一个目录下,以后才能从选择那里直接打开,保存到其他文件夹无效COM口选择端默认通讯速度为高速模式115200 特殊情况下使用低速模式9600动作组调试运行窗口,上面是调试窗口下面是运行窗口初始化:上位机软件初始化,表示从开始地址256号位置开始写动作,只是对软件操作,而不改变已经下载到主板上的动作擦除:对下载到主板上的动作组做清空操作运行动作组:运行已经下载到主板上的动作组停止:停止运行动作组脱机动作组:运行已经下载到主板上的动作组并且下次开机直接执行该动作组禁用:禁用脱机动作组功能舵机口指示条也随意拖动B表示舵机偏差(默认为0),即舵机的相对位置范围为-100----100P表示舵机位置(默认为中位1500)范围为500-2500而导入动作组中的是绝对位置P0=B+P在上图中:#表示几号舵机;P表示舵机的位置;T表示舵机运行到该位置的时间串口发送接收区输入代码点击发送按键即可调试好的舵机偏差值B 跟动作文件P 的保存操作窗口B跟P需要独立保存打开使用也需要独立操作不能用P的打开窗口打开B保存好的文件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
编者寄语:参考本教程进行操作前,请认真研读本注意事项,否则由于错误操作导致的任何问题,包含机器人硬件损坏、电脑硬件损坏、人员伤亡(我们不排除由于某个芯片烧毁导致某些人心脏病复发这类蝴蝶效应的发生)等,与本人以及相关硬件与软件无关,损失自负。
总之,我写这份教程的最终目的是为了让大家更好的上手机器人调试,为大家解决问题。
希望大家本着负责任的态度学习此教程,预祝大家都可以在比赛中获得更好的成绩!注意事项:1.连接舵机与舵控板前,请关闭机器人电源并断开机器人与电脑的USB连接。
2.使用电脑调试机器人时,当打开串口后,请勿在关闭串口前断开机器人与电脑之间的USB连接,否则会导致软件崩溃。
3.舵机控制线不要反接,调试过程中不要让舵机卡死,否则很容易烧毁舵机(随便说一下,所谓的调试经验:耐心、细心、仔细、一定的专业知识,长时间的调试的经验积累,通过视频或者现场向高手学习,调试过程中烧毁一些硬件设备,我们已经习以为常了,即使是高手也会出现错误,我们要避免低级错误,但是我们也不能停下创新的脚步)4.不要在上电的情况下用手触碰舵机控制板,最好对舵机控制板进行一些绝缘处理(热熔胶和绝缘漆是不错的选择,当然也要注意散热问题),机器人上有很多金属件,很容易在运动过程中造成短路。
5.控制器硬件以及软件将不断更新,修复其中的BUG,也感谢大家将调试中出现的问题反馈给我。
(本人邮箱:745312673@)6.有很多使用者向我反馈,电脑的硬件驱动不能识别(之前我们以对XP的32位系统,XP英文版64位系统(国内未发行),win7的32位系统与64位系统,win8的32位系统与64位系统进行过完整的测试,不存在软件兼容问题),可能是控制板硬件的固件没有升级,如果不是上述原因的话,我只能建议你重装系统了,我自己也重装过,win7 64位sp1补丁旗舰版。
重装系统是最快最有效的解决方法!我也正在尝试找到其中的原因,希望大家谅解。
7.调试机器人的时候常常会出现螺丝松动,请及时紧固相关松动的螺丝,否则一颗松动的螺丝将会在调试或者比赛中导致意想不到的灾难。
8.舵机不上电,可能的原因:舵机控制板没有相应程序,没打开电源开关,电池没电了(注意请使用指定型号电池,三洋,18650,单节电压3.7V容量2600mAh,当单节电池电压小于3.7V时,请及时充电,否则您的机器人就抽搐了),电源线断路,个别舵机卡死等,别等到控制板或者舵机冒烟了才断开电源。
可以使用直流稳压电源就行调试,建议电压6.8V-7.4V,额定功率150W以上。
舵机不上电的原因还可能是电池接触不良,在安装电池的时候应注意使电池与电池盒上的金属弹片紧密接触,如果不能接触的话,在电池盒金属弹片上上一点焊锡或者调整弹片位置或者使用其他手段使其导通(注意应保证20A的导通电流)9.通信故障解决方法,更换USB线(在调试过程中的拉扯或者线缆本身的质量问题会导致接触不良等现象,建议直接更换优质线缆)、不建议使用台式机前置USB接口与USB 集线器、某些品牌笔记本电脑的个别USB接口只能作为供电接口、舵机控制板中是否有程序,程序是否运行。
当下载程序后,请单击IAR软件中的运行按钮或者单击舵机控制板上的复位按钮或者给机器人重新上电(这里断电的含义是断开机器人本身的供电以及机器人与电脑之间的USB供电)10.我们只提供基本的机器人的结构件,为了获得更好的成绩,大家可以在我们机器人本体上进行大胆的改装(当然由于不良改装导致的构件损坏,我们是不负责的)。
改装的部分包括:选用更加优质的舵机,适当增加机器人脚板的摩擦系数,增大摩擦力,适当的给机器人增加配重,使机器人的重心位置更加合理,防止机器人走偏,使动作完成更加优美,在规则允许的范围内进行一定的改造将有助于提升比赛成绩。
11.使用新版本的“关节型机器人调试器”时,请使用新版本软件安装目录下自带的工程文件,旧版本软件中的*.dat和*.txt格式的文件可以继续使用,请重新编译*.c格式的文件,并将相关程序复制到新工程中。
12.工程机器人大赛技术讨论QQ群:314935820,零零狗机器人技术咨询QQ群:317667807加入群组的时候请注明自己的学校、职业、姓名,方便我们更好的为您解决问题。
相关资料分享链接:/s/1eQIg0Bg 密码: wnb4舵机控制器硬件介绍:舵机控制器开发环境建立:1.软件安装要使用到一下几个文件,这些文件在百度网盘中均可下载,注意关节型机器人调试器的版本,建议使用最新版本,我们也将不断进行更新。
2.首先安装关节型机器人调试器,双击打开文件,出现以下界面:3.点击下一步,出现以下界面,这里可以不填写信息:4.单击下一步,出现以下界面,这里可以修改安装路径,可以安装到其他路径中,这里为了方便记忆,我们不做修改:5.单击下一步,确认安装信息,然后单击安装:6.安装结束后,出现以下界面,不要勾选“启动程序“前的选项框的:7.至此关节型机器人调试软件安装完成,桌面出现以下图标:8.查看“关节型机器人调试器”软件安装目录下的相关文件,默认安装的文件目录为:“C:\Program Files (x86)\零零狗机器人科技有限公司\关节型机器人调试器(EDUCATION_FREE FOR KE02Z)”,打开该文件目录,关节型机器人调试器(EDUCATION_FREE FOR KE02Z)文件夹下有以下文件:这些文件从左到右依次为:关节型机器人比赛规则、舵机控制器固件升级时所需的固件程序、配套软件使用的调试工程、配套软件使用的运行工程、舵机控制器驱动程序(与IAR自带的驱动相同)、官方的OpenSDA固件升级教程(英文版)、备用复位值。
9.安装“EWARM-CD-7101-6735.exe”嵌入式开发环境,双击软件图标打开软件安装界面:10.选择“install IAR Embedded Workbench”进行安装:11.进行安装后将出现以下界面(我们以6.7版本为例):12.单击”Next”,选择”I accept the terms of the licence agreement”,单击”Next”:13.这里可以修改安装目录,我们这里选择默认路径,单击”Next”:14.这里单击”Next”15.这里单击“install”16.安装完成界面,单击“Finish”,不要勾选“View the release notes”选项:17.开始菜单——所有程序——IAR Systems,”AR Embedded Workbench”右键——发送到“桌面快捷方式”18.双击打开该软件,第一次打开软件时将提示证书对话框,直接点击取消或直接关闭即可,以下是软件界面,至此表示软件安装完成,现在关闭软件,开始安装驱动程序。
19.安装驱动程序,打开IAR开发环境向导,单击“Install drivers”选项:20.软件将自动打开“drivers”文件夹,选择“pemicro”文件夹:21.双击安装“PEDrivers_install.exe”22.出现以下软件安装界面后,选择“I Agree”选项:23.这里选择默认的安装路径(建议不要修改),单击“Install”:24.单击“Close”即完成驱动程序安装25.单击IAR安装向导中的“Exit”,结束安装。
26.软件安装完成后的授权操作,打开“EWARM_7.10_License.rar”压缩文件:27.压缩文件中包含“Selected.package”文件和“说明.txt”文件,具体的授权说明参见“说明.txt”28.相关文件路径在文件系统中可能属于隐藏路径,查看隐藏文件夹的过程为:计算机——组织——文件夹和搜索选项29.单击“查看“30.在高级设置中勾选“显示隐藏的文件、文件夹和驱动器”,如图所示,单击确定即可。
舵机控制器固件升级操作步骤(已安装驱动程序):1.断开舵机控制器的所有电源连接,按下舵机控制器复位按键,使用USB线缆连接电脑与舵机控制器,等待电脑出现以下情况,在可移动存储的设备中出现名为BOOTLOADER 的U盘,如下图:2.此时松开复位开关,将名为DEBUG-APP_Pemicro_v108.SDA的文件拷贝至该移动设备中,如下图3.关掉上述窗口后,断开电脑与舵机控制器之间的USB连接,重接使用USB线缆连接电脑与舵机控制器,此时电脑右下角(以win7为例)出现安装设备驱动:4.安装结束后电脑桌面右下角出现安装驱动完成标志:5.单击上图中的红色标记的标志,出现下图对话框,其中,OpeSDA-CDC Serial Port以及PEMicro OpenSDA Debug Driver均可以使用,表明驱动已经安装完成。
安装驱动的具体用时视具体电脑机型而定,某些机型用时较长请耐心等待。
一般1分钟之内即可安装完成,某些机型首次安装驱动可能要话费10分钟,请务必保证该期间舵机控制器与电脑可靠连接。
当第一次安装驱动完成后,以后使用均可快速安装驱动。
假如极少部分电脑出现驱动安装失败对话框,请检查电缆质量,是否有效可靠连接,如仍未安装完成,请参照编者寄语后的注意事项解决。
6.驱动安装结束后,点击在计算机——右键——管理:7.出现计算机管理选项,单击左侧设备管理器:打开Jungo和端口(COM和LPT)目录:8.如图所示:在Jungo目录下有PEMicro OpenSDA Debug Driver以及在端口(COM和LPT)目录下有OpeSDA-CDC Serial Port,如未出现上述两个设备,请重复固件升级操作,记住OpeSDA-CDC Serial Port后括号中的标号,途中对应的是COM48,此为串口号,对用舵机控制器电脑端软件的串口号。