全国青少年机器人技术等级考试-二级理论模拟题(A卷)
2023.05全国青少年机器人技术等级考试理论综合试卷(二级)

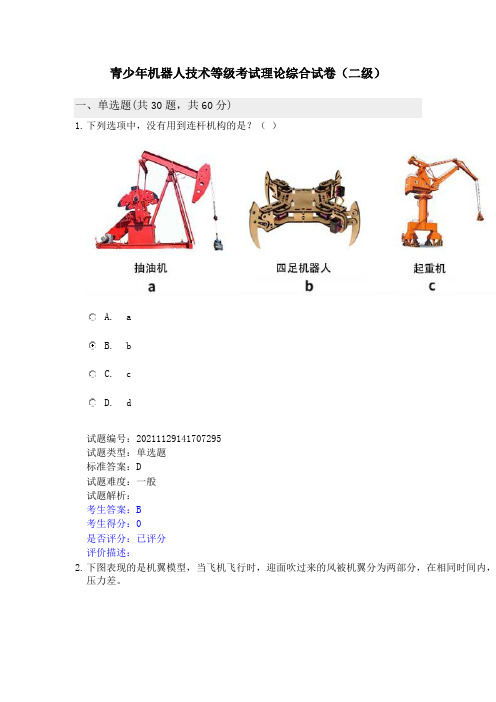
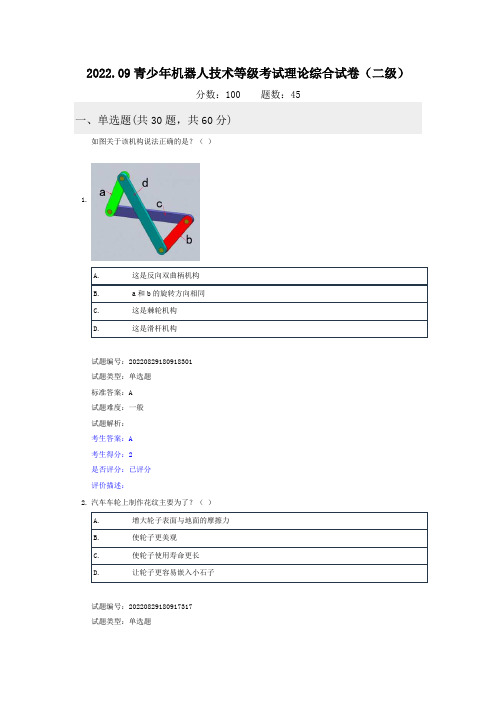
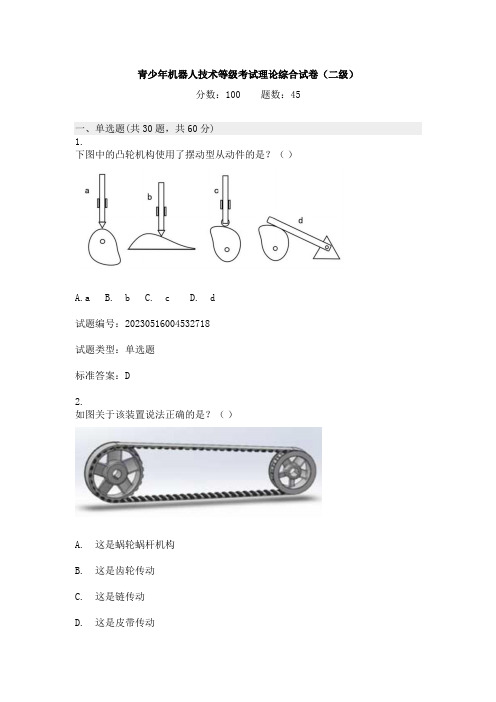
青少年机器人技术等级考试理论综合试卷(二级)分数:100 题数:45一、单选题(共30题,共60分)1.下图中的凸轮机构使用了摆动型从动件的是?()A. aB. bC. cD. d试题编号:20230516004532718试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:A考生得分:0是否评分:已评分评价描述:2.如图关于该装置说法正确的是?()A. 这是蜗轮蜗杆机构B. 这是齿轮传动C. 这是链传动D. 这是皮带传动试题编号:20230516004533186试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:C考生得分:0是否评分:已评分评价描述:3.如图关于该机构说法正确的是?()A. 这是棘轮机构B. a是主动件C. b是主动件D. 这是凸轮机构试题编号:20230516004532765试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:4.如图,曲柄滑块机构中的滑块做什么动作?()A. 沿着轨道来回滑动B. 圆周运动C. 静止不动D. 无规律运动试题编号:20230516004532639试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:5.一节干电池的电压约为?()A. 1.5VB. 1000vC. 36VD. 220V试题编号:20230516004531935试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:6.同一地点,以下常见物品哪个受到的重力最大?()A. 一个橡皮B. 一把尺子C. 一支铅笔D. 一张桌子试题编号:20230516004532091试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:7.关于能量说法错误的是?()A. 电动机可以将电能转化为机械能B. 发电机可以将机械能转化为电能C. 冰块放在额头上,可以实现内能传递,让人感到凉快D. 能量是不能相互转化的试题编号:20230516004532201试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:8.如图,该机构中主动棘爪是指?()A. aB. bC. cD. d试题编号:20230516004532905试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:9.如图该机构的锁合方式为?()A. 重力锁合B. 几何锁合C. 弹力锁合D. 槽凸轮机构锁合试题编号:20230516004532466试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:10.一个六足机器人,用左右两个电机分别控制左右各三足,左侧电机转速是200rpm,右侧电机转A. 原地左转B. 向右前方转向C. 原地右转D. 原地不动试题编号:20230516004532169试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:11.如图关于该凸轮机构的从动件,说法正确的是?()A. 这是尖顶从动件B. 这是滚子从动件C. 这是平底从动件D. 这是方形从动件试题编号:20230516004532686试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:12.下图为飞机起飞时的机翼示意图,说法正确的是?()A. 机翼上侧曲线弧度大于下侧B. 机翼周围没有气压C. 机翼上侧所受的气压为0D. 机翼下侧所受的气压为0试题编号:20230516004531904试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:13.“木牛流马”是由谁发明的?()A. 张衡B. 祖冲之C. 诸葛亮D. 苏颂试题编号:20230516004531669试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:14.下列可以产生滑动摩擦力的情形是?()A. 物体静止在桌子上B. 物体静止在斜面上C. 物体悬挂在空中D. 物体在桌面上滑动试题编号:20230516004532013试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:15.如图,关于自行车说法正确的是?()A. a处采用平行四边形框架来增加结构稳定B. b处有花纹是为了减小与地面的摩擦C. c处采用了皮带传动D. c处采用了链传动试题编号:20230516004532138试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:16.如图关于该凸轮机构,说法正确的是?()A. 这是槽凸轮机构B. 这是共轭凸轮机构C. 这是等径凸轮机构D. 这是等宽凸轮机构试题编号:20230516004532858试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:D考生得分:0是否评分:已评分评价描述:17.如图,静止在斜面上的物体,受到的向下垂直于地面的力是?()A. 重力B. 滑动摩擦力C. 静摩擦力D. 斜面给物体的支持力试题编号:20230516004532045试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:18.下图中哪个是皮带交叉传动?()A. aB. bC. cD. d试题编号:20230516004533155试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:19.如图该机构中主动摆杆是指?()A. aB. bC. cD. d试题编号:20230516004532513试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:20.下列哪个是摩擦式棘轮机构?()A. aB. bC. cD. d试题编号:20230516004532435试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:21.可以利用传感器等获取环境信息,然后利用智能技术识别、理解、推理,最后做出规划决策,A. 示教再现型机器人B. 感知型机器人C. 智能机器人D. 工业机器人试题编号:20230516004531748试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:B考生得分:0是否评分:已评分评价描述:22.下列没有采用连杆机构的是?()A. a挖掘机B. b机械臂C. c三角板D. d雨刷器试题编号:20230516004532357试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:23.如图,该机构是曲柄摇杆机构,那么做左右摇摆动作的杆是?()A. aB. bC. cD. d试题编号:20230516004532936试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:24.如图关于双摇杆机构,说法正确的是?()A. a是基座B. b是摇杆C. c做摇摆动作D. d是连杆试题编号:20230516004533108试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:25.下图中属于外啮合棘轮机构的是?()A. aB. bC. cD. d试题编号:20230516004532560试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:26.东汉时期,张衡发明了“记里鼓车”用来?()A. 测量行驶路程B. 击鼓娱乐C. 专门运送军用物资D. 表演鼓乐试题编号:20230516004531716试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:27.如图这是什么机构?()A. 平行双曲柄机构B. 反向双曲柄机构C. 曲柄摇杆机构D. 双摇杆机构试题编号:20230516004533233试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:B考生得分:0是否评分:已评分评价描述:28.如图曲柄滑块机构中哪个部分做圆周运动?()A. aB. bC. cD. d试题编号:20230516004532388试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:29.如图,关于该机构说法正确的是?()A. 这是凸轮机构B. 这是棘轮机构C. 这是槽轮机构D. 这是连杆机构试题编号:20230516004532811试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:30.下图中哪个是槽轮机构?()A. aB. bC. cD. d试题编号:20230516004532592试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:二、多选题(共5题,共20分)31.下图中哪三个选项不是单动式棘轮机构?()A. aB. bC. cD. d试题编号:20230516004532983试题类型:多选题标准答案:A|B|D试题难度:一般试题解析:考生答案:D|C|A考生得分:0是否评分:已评分评价描述:32.下图凸轮机构中哪两个选项采用了盘形凸轮?()A. aB. bC. cD. d试题编号:20230516004533030试题类型:多选题标准答案:A|D试题难度:一般试题解析:考生答案:B|C考生得分:0是否评分:已评分评价描述:33.以下属于机器人组成部分的有?()A. 机械部分B. 传感部分C. 控制部分D. 人类外形试题编号:20230516004531857试题类型:多选题标准答案:A|B|C试题难度:一般试题解析:考生答案:C|B|A考生得分:4是否评分:已评分评价描述:34.下列哪两项是滑动摩擦力的产生条件?()A. 两个物体相互接触B. 两个物体发生相对运动C. 两个物体颜色一致D. 两个物体气味一致试题编号:20230516004532248试题类型:多选题标准答案:A|B试题难度:试题解析:考生答案:A|B考生得分:4是否评分:已评分评价描述:35.如图,说法正确的是?()A. 这是齿轮传动B. ab两轮转向相反C. 这是皮带平行传动D. 这是皮带交叉传动试题编号:20230516004533280试题类型:多选题标准答案:B|D试题难度:一般试题解析:考生答案:D|B考生得分:4是否评分:已评分评价描述:三、判断题(共10题,共20分)36.电能不可以转化为机械能。
全国青少年机器人等级考试真题试卷1 二级(有答案)

全国青少年机器人技术等级考试理论综合试卷(二级)测试卷1一、单选题(共30题,每题2分,共60分)1.以下哪项是平底从动件凸轮机构特征?()A. 凸轮只能是外凸的B. 凸轮只能是内凹的C. 凸轮的形状没有限制D. 凸轮必须是圆柱凸轮标准答案:A2.飞机可以飞上天空主要是因为?()A. 起飞时机翼下方气压比上方气压大B. 起飞时机翼上方气压比下方气压大C. 飞机外形像鸟D. 飞机机身不重标准答案:A3.以下关于皮带交叉传动说法正确的是?()A. 两带轮转向相同B. 两带轮转向相反C. 带轮转向关系不能确定D. 是指带轮旋转中心轴交叉标准答案:B4.中国家用电压为?()A. 22VB. 50VC. 110VD. 220V标准答案:D5.我们在用鱼线轮回收鱼线时,松开手鱼线也不会被拉出,是因为?()A. 鱼线被卡死了,不能动B. 因为水里的鱼也不动C. 鱼线用完了D. 线轮上有棘轮,阻止了一个方向的转动标准答案:D6.机械尺蠖只能往前走不能后退,是因为它安装了()。
A. 棘轮机构B. 凸轮机构C. 槽轮机构D. 滑轮标准答案:A7.如图,关于该机构说法正确的是?()A. 它是外啮合棘轮机构B. 棘爪在棘轮的外侧C. 它是内啮合棘轮机构D. 它是齿式棘轮机构标准答案:C8.如图,像两张纸中间吹起,两张纸会怎么变化?()A. 两张纸相互分离B. 两张纸相互吸引C. 没有变化D. 纸张颜色变化标准答案:B9.诸葛亮制造的木牛流马的作用是?()A. 灌溉农田B. 运动军粮C. 测量行驶距离D. 观测天象标准答案:B10.汽车车轮上都有很深的花纹主要目的是?()A. 美观B. 行驶时增大与地面的摩擦力C. 更容易生产D. 能够减小车轮重量标准答案:B11.关于差速运动控制说法正确的是?()A. 是我们用来调整机器人转向的常用方法B. 只能适用于机械小车C. 是指机器人两侧“脚”的运动快慢一样的时候,他可以转向D. 机器人“左脚电机”转速比“右脚电机”快时,机器人会原地不动。
全国青少年机器人技术等级考试理论综合试卷(二级)
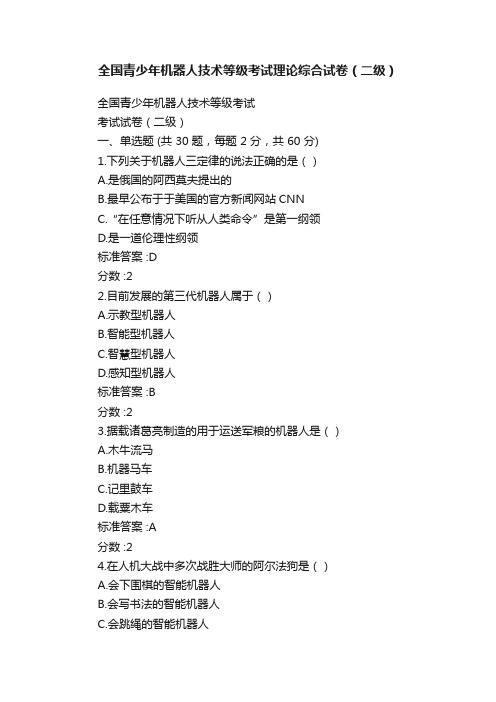
全国青少年机器人技术等级考试理论综合试卷(二级)全国青少年机器人技术等级考试考试试卷(二级)一、单选题 (共 30 题,每题 2 分,共 60 分)1.下列关于机器人三定律的说法正确的是()A.是俄国的阿西莫夫提出的B.最早公布于于美国的官方新闻网站CNNC.“在任意情况下听从人类命令”是第一纲领D.是一道伦理性纲领标准答案 :D分数 :22.目前发展的第三代机器人属于()A.示教型机器人B.智能型机器人C.智慧型机器人D.感知型机器人标准答案 :B分数 :23.据载诸葛亮制造的用于运送军粮的机器人是()A.木牛流马B.机器马车C.记里鼓车D.载粟木车标准答案 :A分数 :24.在人机大战中多次战胜大师的阿尔法狗是()A.会下围棋的智能机器人B.会写书法的智能机器人C.会跳绳的智能机器人D.会用两条腿跑步的智能机器人标准答案 :A分数 :25.下列机器人是军用机器人的是()A.英国制造的有跳动心脏的机器人REXB.美国生产的BigDog 大狗机器人C.能像人一样行走的机器人ASIMOD.机器人救生员E.M.I.L.Y.标准答案 :B分数 :26.以下不属于机器人的必要组成部分的是()A.输入设备B.输出设备C.主控制器D.机械手臂标准答案 :D分数 :27.机器人的CPU和电源相当于人的()A.大脑和躯干B.心脏和手臂C.大脑和心脏D.手臂和大脑标准答案 :C分数 :28.机器人语言是二进制组成的字串机器码,数字范围是()A.0 到 15B.0到 9C.0到 7D.0到 1分数 :29.以下机器人的常用驱动方式不包括()A.电力驱动B.水驱动C.液压驱动D.气压驱动标准答案 :B分数 :210.相互接触的物体发生相对运动时,在接触面产生的阻碍相对运动的力叫做()A.摩擦力B.支持力C.弹力D.重力标准答案 :A分数 :211.如图所示方块置于斜面上受到的力是()A.重力B.支持力C.摩擦力D.以上都是标准答案 :D分数 :212.功的大小是力乘以力的方向上移动的距离,下列做功最小的是()A.小明大力推50 斤的水桶,水桶没有动B.妈妈把 50 斤的水桶推动了0.3 米C.爸爸把 50 斤的小明举过头顶D.机器人把100 斤的重物抬上 3 米高的货架分数 :213.荡秋千时关于能量的说法下列正确的是()A.在最低点时,速度最快,能量最大B.最高点时能量为0C.最低点和最高点的总能量相等D.在最低点时动能最小标准答案 :C分数 :214.关于空气的说法正确的是()A.飞机飞行时机翼的上侧气流速度慢于下侧B.飞行时机翼上下侧的压力差为0C.气流越快,压力越大D.地铁进站时站在黄线外是因为火车带动气流加快,压力变小,人容易被”吸入“铁轨标准答案 :D分数 :215.关于杠杆平衡正确的是()A.杠杆两侧受力大小相等B.两侧力的作用线到支点的距离乘以力的大小的值相等C.天平不是杠杆D.杠杆平衡必须两侧的施力点到支点的距离相等标准答案 :B分数 :216.下列滑轮组最省力的是()A.AB.BC.CD.D标准答案 :D分数 :217.下图小齿轮10 齿,大齿轮100 齿,由下方大齿轮为主动轮,则齿轮组的传动比为()A.1:100B.1: 10C.100: 1D.10000:1标准答案 :A分数 :218.舂米机能够做间歇的敲打的原因是具有哪种机构()A.杠杆机构B.连杆机构C.凸轮机构D.棘轮机构标准答案 :C分数 :219.下图机构中凸轮旋转周期为20 秒,小轮的半径是2,上方从动杆顶起的周期是()A.20 秒B.10 秒C.2 秒D.5 秒标准答案 :A分数 :220.下列应用了连杆机构的是()A.三角板B.高尔夫球杆C.螺旋桨D.雨刷器标准答案 :D分数 :221.下列杆机构说法错误的是()A.连杆可以做摇摆运动B.连杆不能做圆周运动C.汽车的转向装置用了连杆机构D.行走机器人大多采用连杆机构标准答案 :B分数 :222.下列属于发动机曲柄连杆机构的是()A.机体组B.活塞连杆组C.曲轴飞轮组D.以上都是标准答案 :D分数 :223.对于汽车的曲柄连杆机构描述正确的是A.由曲柄直接带动活塞转动B.由活塞带动连杆转动C.由曲柄带动连杆,连杆带动活塞转动D.以上都不对标准答案: C分数 :224.下列关于曲柄滑块的应用正确的是()A.往复活塞式发动机B.压缩机主机C.冲床主机D.以上都是标准答案 :D分数 :225.下图曲柄滑块机构中作圆周运动的部件和做往复运动的部件分别是()A.较短的竿和较长的竿B.较短的竿和蓝色滑块C.较长的竿和较短的竿D.蓝色滑块和较短的竿标准答案 :B分数 :226.下列模型中采用了棘轮机构的是()A.机械尺蠖B.舂米机C.秋千D.直升机标准答案 :A分数 :227.以下关于棘轮的说法错误的是()A.外啮合棘轮加工和维修方便B.内啮合棘轮外形尺寸大C.摩擦式棘轮传动平稳、噪音小D.棘轮机构的主要作用是间歇送进、制动和超越标准答案 :B分数 :228.关于电机的说法正确的是()A.电机分为直流电机和交流电机B.电机又被称为“马达”C.电机将电能转化为机械能D.以上都正确标准答案 :D分数 :229.下列关于传动方式正确的是()A.齿轮传动的精密度高于皮带传动B.皮带传动的噪音大C.链传动中采用的传动链不可拆卸D.在稻草人模型中主要采用了链传动标准答案 :A分数 :230.下列不能实现间歇运动的机构是()A.棘轮机构B.不完全齿轮机构C.凸轮机构D.全齿轮机构标准答案 :D分数 :2二、多选题 (共 10 题,每题 2 分,共 20 分)31.下列哪些是军用机器人的功能()A.清洁卧室B.手术缝合C.运送物资D.侦查地形标准答案 :C|D分数 :232.工业机器人的特点包括()A.能够适应恶劣的工作环境B.能够长时间高强度工作C.工作具有高精密度D.具有亲和力,能与各个年龄段的人类交流标准答案 :A|B|C分数 :233.机器人的 CPU要求()A.体积小B.处理数据快C.可靠性高D.制造工艺复杂标准答案 :A|B|C分数 :234.下列关于汽车的说法正确的是()A.变向装置采用了连杆机构B.发动机应用了曲柄连杆机构C.方向盘应用了轮轴机构D.刹车应用了摩擦原理标准答案 :A|B|C|D分数 :235.关于凸轮的分类正确的是()A.按外形分为盘形凸轮、移动凸轮、圆柱凸轮B.按从动件分为顶尖式、滚子式、平底式、曲底式C.按从动件运动方式分为直动式、摆动式D.按凸轮与从动件接触方式分为力锁和、几何锁和标准答案: A|B|C|D分数 :236.平面四杆能够达到的输出结果有()A.圆周运动B.摇摆运动C.反向圆周运动D.间歇运动标准答案 :A|B|C分数 :237.下列图片中采用了连杆机构的的有()A.B.C.D.标准答案 :B|C|D分数 :238.下列物品采用了棘轮的有()A.钓鱼杆B.机械尺蠖C.千斤顶D.自行车标准答案 : A|B|C|D分数 :239.下列结构在六足机器人模型中应用的有()A.连杆机构B.凸轮机构C.曲柄机构D.棘轮机构标准答案 :A|C分数 :240.制造一个机器人使他有转向装置,并且只能向前不能退后,需要采用的机构有()A.连杆机构B.杠杆结构C.棘轮机构D.滑轮组标准答案 :A|C分数 :2三、判断题 (共 10 题,每题 2 分,共 20 分)41.记里鼓车是中国古代的机器人,主要作用是敲鼓供人们娱乐。
全国青少年机器人技术等级考试卷(二级)xxxxxxxx

全国青少年机器人技术等级考试卷(二级)xxxxxxxxxxxxxxxx全国青少年机器人技术等级考试试卷(二级)试卷编号:试卷录入者:机器人包老师试卷总分:100出卷时间:2018-12-25 13:17答题时间:30分钟分数:100题数:45一、单选题(共30题,每题2分,共60分)1.链传动相比齿轮传动的优点是?[2分]A.更适合远距离传动B.轮转速更快C.动力更大D.链轮安装可以不在同一平面内参考答案:A2.XXX发明了一种运送军粮的机器人称为?[2分]A.木牛流马B.指南车C.记里鼓车D.运粮车参考答案:A3.一辆六轮车,左侧三个轮转速100rpm,右侧三个轮转速200rpm则此车会?[2分]A.向前直走B.向前走并向左转C.向后退D.原地不动参考答案:B4.以下关于前轮驱动和后轮驱动说法正确的是?[2分]专业资料精心整理A.前轮驱动因省去了通今后轮的驱动轴和后差动器等零件,内部空间更大B.前轮驱动简单转向过度,后轮驱动转向缺乏C.前轮驱动零件更多,重量更大D.前轮驱动零件多成本更高参考答案:A5.关于电动机的能量转化说法正确的是?[2分]A.机械能转化为电能B.电能转化为机械能C.动能转化为势能D.势能转化为动能参考答案:B6.如图,曲柄滑块机构中曲柄做的是甚么活动?A.摇摆活动B.左右移动C.等速回转D.无规律运动参考答案:C7.如图,该机构为?2分]A.棘轮机构B.槽轮机构C.不完全齿轮机构D.凸轮机构2分]专业资料精心整理参考答案:B8.如图,一个大齿轮带动一个小齿轮,下列正确的是?A.作用是加速B.作用是减速C.两轮的旋转方向相同2分]D.两个齿轮的轮齿外形大小可以不一样参考答案:A9.下列图片是棘轮的是?A.aB.bC.cD.d参考答案:B10.以下最得当制造公转自转模型的机器结构是?[2分]A.行星齿轮B.连杆C.曲柄摇杆D.曲柄滑块参考答案:A2分]专业资料精心整理11.如图,以下齿轮属于平齿轮的是?A.aB.bC.cD.d参考答案:A12.以下哪一项是皮带传动的优点?[2分]A.结构简单,适用于两轴中心距较大的传动场合B.使用寿命短C.传动效率慢D.传动平稳,噪声大参考答案:A13.如图,下列不是间歇活动机构的是?[2分]A.aB.bC.cD.d参考答案:C14.关于皮带传动说法毛病的是?[2分]A.皮带轮旋转偏向可能相同专业资料精心整理2分]。
青少年机器人技术等级考试理论综合试卷(二级)
青少年机器人技术等级考试理论综合试卷(二级)一、单选题(共30题,共60分)1.下列选项中,没有用到连杆机构的是?()A. aB. bC. cD. d试题编号:20211129141707295试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:B考生得分:0是否评分:已评分评价描述:2.下图表现的是机翼模型,当飞机飞行时,迎面吹过来的风被机翼分为两部分,在相同时间内,压力差。
A. 短,慢,小B. 短,慢,大C. 长,快,小D. 长,快,大试题编号:20211129141706778试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:3.下列说法错误的是?()A. 摩擦力的大小与接触面的粗糙程度有关B. 静止在斜面上的物体一定受到了摩擦力作用C. 鞋底上有花纹是为了行走时增大摩擦力D. 汽车轮胎上的花纹是为了减小与地面的摩擦力试题编号:20211129141706904试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:4.在凸轮机构中凸轮转速的高低决定了()运动的快慢?A. 滑块B. 从动件C. 机架D. 凸轮试题编号:20211129141707498试题类型:单选题标准答案:B试题难度:试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:5.按照凸轮的形状对凸轮机构分类,不包括下列哪一项?()A. 盘形凸轮B. 移动凸轮C. 圆柱凸轮D. 沟槽凸轮试题编号:20211129141707324试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:6.关于曲柄摇杆机构说法正确的是?()A. 曲柄做摇摆动作B. 摇杆做回转运动C. 曲柄做回转运动D. 摇杆在既定轨道上滑动试题编号:20211129141707829试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:7.以下不属于典型棘轮机构组成的是?()A. 主动摆杆B. 主动棘爪和止回棘爪C. 棘轮D. 带圆销的回转体试题编号:20211129141707260试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:8.通常我们将机器人分为几代?()A. 1代B. 2代C. 3代D. 4代试题编号:20211129141706650试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:9.人体能承受的的最大安全电压是?()A. 5VB. 36VC. 110VD. 220V试题编号:20211129141706809试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:10.下列齿轮组起加速作用的是?()A. 主动轮20齿,从动轮8齿B. 主动轮20齿,从动轮20齿C. 主动轮8齿,从动轮20齿D. 主动轮8齿,从动轮8齿试题编号:20211129141707859试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:11.以下选项中对皮带传动叙述正确的是?()A. 皮带传动必须在同一平面内B. 皮带传动两轮只能同向转动C. 皮带传动两轮只能反向转动D. 皮带传动安装方式可以有半交叉传动试题编号:20211129141707361试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:12.以下图片中应用了皮带传动的是?()A. aB. bC. cD. d试题编号:20211129141707595试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:13.滑杆机构中回转体做什么运动?()A. 前后摆动B. 上下滑动C. 回转运动D. 左右移动试题编号:20211129141707391试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:14.以下凸轮机构没有采用几何锁合方式的是?()A. 共轭凸轮机构B. 槽凸轮机构C. 等宽凸轮机构D. 弹力锁合凸轮机构试题编号:20211129141707525试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:C考生得分:0是否评分:已评分评价描述:15.以下哪个不是凸轮机构?()A. aB. bC. cD. d试题编号:20211129141707465试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:C考生得分:0是否评分:已评分评价描述:16.如图关于该槽轮机构说法正确的是?()A. a是主动件B. b是主动件C. a转动一周,b转动一次D. a转动一周,b的转动次数无法确定试题编号:20211129141707428试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:17.关于曲柄滑块机构下列说法正确的是?()A. 曲柄滑块机构中曲柄一定是主动件B. 曲柄滑块机构中滑块一定是主动件C. 曲柄滑块机构中有连杆起连接作用D. 曲柄滑块机构中只有曲柄和滑块两个零件试题编号:20211129141707033试题类型:单选题标准答案:C试题难度:试题解析:考生答案:A考生得分:0是否评分:已评分评价描述:18.以下著名人物中,提出“机器人三原则”的是?()A. aB. bC. cD. d试题编号:20211129141706580试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:19.关于平面连杆机构说法错误的是?()A. 不易实现较为复杂的运动规律B. 连杆属于低副机构C. 制造精度较高,制造相对简单D. 连杆机构中杆越多,动作越精确试题编号:20211129141707563试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:20.关于诸葛亮发明的木牛流马说法正确的是?()A. 是工业机器人B. 是服务型机器人C. 是军用机器人D. 是医用机器人试题编号:20211129141706616试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:21.如图下列哪项不属于棘轮机构?()A. aB. bC. cD. d试题编号:20211129141707226试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:22.如果物体在斜面上匀速下滑,则该物体受到的力不包括?()A. 摩擦力B. 拉力C. 自身的重力D. 斜面的支持力试题编号:20211129141706964试题类型:单选题标准答案:B试题难度:试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:23.如图曲柄滑块机构,回转体A做圆周运动,滑块B做什么动作?()A. 回转动作B. 在轨道上滑动C. 上下摆动D. 固定不动试题编号:20211129141707630试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:24.图中为典型的棘轮机构,分别由哪些构件组成?()A. a主动棘爪、b主动摆杆、c棘轮、d止回棘爪B. a主动摆杆、b主动棘爪、c棘轮、d止回棘爪C. a主动摆杆、b主动棘爪、c止回棘爪、d棘轮D. a止回棘爪、b主动棘爪、c棘轮、d主动摆杆试题编号:20211129141707763试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:25.以下各项中,适合远距离传动的是?()A. 带传动B. 齿轮传动C. 蜗杆传动D. 螺旋传动试题编号:20211129141707798试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:26.以下关于重力的说法正确的是?()A. 重力的方向无法确定B. 重力的大小无法计算C. 重力的作用点在物体的重心D. 一个小苹果的重力和一个大西瓜的重力无法比较试题编号:20211129141706872试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:27.关于前轮驱动和后轮驱动说法正确的是?()A. 前驱的起步加速表现更好B. 前驱的机械效率更低C. 后驱容易转向过度D. 前驱容易转向过度试题编号:20211129141706936试题类型:单选题标准答案:C试题难度:试题解析:考生答案:D考生得分:0是否评分:已评分评价描述:28.一个小车采用差速运动控制方向,下列说法正确的是?()A. 左侧车轮转速大于右侧车轮,小车前行并左拐B. 左侧车轮转速小于右侧车轮,小车前行并右拐C. 左侧车轮转速为0,右侧车轮有转速,小车原地左拐D. 右侧车轮转速为0,左侧车轮有转速,小车原地左拐试题编号:20211129141707001试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:29.直立行走机器人多采用哪种机构?()A. 连杆机构B. 齿轮机构C. 棘轮机构D. 凸轮机构试题编号:20211129141707144试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:30.下列不属于凸轮机构的从动件的是?()A. 尖顶从动件B. 滚子从动件C. 三角从动件D. 平底从动件试题编号:20211129141707188试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:二、多选题(共5题,共20分)31.凸轮机构主要由哪些部件组成?()A. 凸轮B. 基座或机体C. 从动件D. 主动摆杆试题编号:20211129141707662试题类型:多选题标准答案:A|B|C试题难度:试题解析:考生答案:C|B|A考生得分:4是否评分:已评分评价描述:32.皮带传动的缺点有哪些?()A. 传动时间有延缓B. 传动时有能量的损失C. 传动不够精确D. 过载时容易打滑试题编号:20211129141707894试题类型:多选题标准答案:A|B|C|D试题难度:试题解析:考生答案:B|C|A考生得分:0是否评分:已评分评价描述:33.关于能量说法正确的有哪些?()A. 机械能包括动能和势能B. 能量可以相互转化C. 能量可以从一个物体转移到另一个物体D. 弹性势能不属于机械能试题编号:20211129141706745试题类型:多选题标准答案:A|B|C试题难度:试题解析:考生答案:B|C考生得分:0是否评分:已评分评价描述:34.以下机构中可以不在同一平面内安装的是?()A. 齿轮组B. 传动链和链轮C. 皮带和带轮D. 双摇杆机构试题编号:20211129141707697试题类型:多选题标准答案:A|C试题难度:试题解析:考生答案:A|B|D考生得分:0是否评分:已评分评价描述:35.两物体之间产生摩擦力必须具备的条件有哪些?()A. 两物体相互接触B. 两个物体颜色一致C. 两个物体有相对运动趋势或已经发生运动D. 两物体材料一致试题编号:20211129141707064试题类型:多选题标准答案:A|C试题难度:试题解析:考生答案:C|A考生得分:4是否评分:已评分评价描述:三、判断题(共10题,共20分)36.现代机器人已经发展到“智能机器人”时代。
2022.09全国青少年机器人技术等级考试理论综合试卷(二级)
2022.09青少年机器人技术等级考试理论综合试卷(二级)分数:100 题数:45一、单选题(共30题,共60分)如图关于该机构说法正确的是?()1.试题编号:20220829180918301试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:2. 汽车车轮上制作花纹主要为了?()试题编号:20220829180917317试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:3. 即使是水性很好的人在水流湍急的河里游泳也非常危险,主要是因为?()试题编号:20220829180917238试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:4. 以下不属于凸轮机构组成的是?()试题编号:20220829180918192试题类型:单选题标准答案:B试题难度:试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:5. 以下不能准确传递动力的是?()试题编号:20220829180918801试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:如图该机构为?()6.试题编号:20220829180917551试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:下图中使用了摆动型从动件的是?()7.试题编号:20220829180918473试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:8. 以下关于链传动说法正确的是?()试题编号:20220829180918988试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:9. 关于重力说法正确的是?()试题编号:20220829180917035试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:10. 机械手臂常常使用以下哪种机构?()试题编号:20220829180917504试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:如图该曲柄滑块机构中滑块是指?()11.试题编号:20220829180917723试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:如图,观察该机构,回转体做什么动作?()12.试题编号:20220829180917598试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:13. “公输子削木为鹊”的典故记载的是?()试题编号:20220829180916895试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:14. 与后轮驱动车相比,说法正确的是?()试题编号:20220829180917285试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:如图下列说法错误的是?()15.试题编号:20220829180917644试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:16. 中国家用标准电压是?()试题编号:20220829180917004试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:如图下列说法正确的是?()17.试题编号:20220829180918379试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:18. 关于恐怖谷理论下列说法正确的是?()试题编号:20220829180916816试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:如图关于该机构说法正确的是?()19.试题编号:20220829180917691试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分 评价描述:20. 一辆小车分别由左右两个电机控制左右轮,左侧轮子转速是50rpm ,右侧轮子转速是100rpm ,则小车?( )试题编号:20220829180917160试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:关于该传动方式说法正确的是?()21.试题编号:20220829180918895试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:如图,飞机起飞时关于机翼说法正确的是?()22.试题编号:20220829180917207试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分 评价描述:23.如图一辆小汽车停在陡坡上,那么它受到的力有?( )试题编号:20220829180917364试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:如图,脚掌上下踩踏缝纫机踏板,会带动上面的轮子转动,该机构相当于?()24.试题编号:20220829180917926试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:25. 关于“木牛流马”说法正确的是?()试题编号:20220829180916848试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:如图该机构为?()26.试题编号:20220829180917770试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:27. 下列不能实现间歇运动的是?()试题编号:20220829180918113试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:28. 连杆机构中相邻的两杆是通过面来接触的,那么连杆机构是?()试题编号:20220829180918020试题类型:单选题标准答案:B试题难度:试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:29. 典型的棘轮机构不包括?()试题编号:20220829180917832试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:如图该传动方式为?()30.试题编号:20220829180919067试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:二、多选题(共5题,共20分)31. 下列情形会产生摩擦力的是?()试题编号:20220829180917395试题类型:多选题标准答案:B|C|D试题难度:试题解析:考生答案:B|C|D考生得分:4是否评分:已评分评价描述:如图一个小朋友推一个静止在地面上的箱子,说法正确的是?()32.试题编号:20220829180917082试题类型:多选题标准答案:A|B|D试题难度:一般试题解析:考生答案:A|B考生得分:0是否评分:已评分评价描述:33. 下列传动方式可以准确无误地传递动力的是?()试题编号:20220829180919160试题类型:多选题标准答案:B|C试题难度:一般试题解析:考生答案:B|C考生得分:4是否评分:已评分评价描述:如图关于该机构说法正确的是?()34.试题编号:20220829180918645试题类型:多选题标准答案:A|B试题难度:一般试题解析:考生答案:A|B考生得分:4是否评分:已评分评价描述:35. 下列属于典型棘轮机构组成的是?()试题编号:20220829180918551试题类型:多选题标准答案:A|B|C|D试题难度:试题解析:考生答案:A|B|C|D考生得分:4是否评分:已评分评价描述:三、判断题(共10题,共20分)36. 小齿轮带动大齿轮起加速的作用。
2023.5机器人考试二级(理论真题)
青少年机器人技术等级考试理论综合试卷(二级)分数:100 题数:45一、单选题(共30题,共60分)1.下图中的凸轮机构使用了摆动型从动件的是?()A.aB. bC. cD. d试题编号:20230516004532718试题类型:单选题标准答案:D2.如图关于该装置说法正确的是?()A. 这是蜗轮蜗杆机构B. 这是齿轮传动C. 这是链传动D. 这是皮带传动试题编号:20230516004533186试题类型:单选题标准答案:D3.如图关于该机构说法正确的是?()A. 这是棘轮机构B. a是主动件C. b是主动件D. 这是凸轮机构试题编号:20230516004532765试题类型:单选题标准答案:C4.如图,曲柄滑块机构中的滑块做什么动作?()A. 沿着轨道来回滑动B. 圆周运动C. 静止不动D.无规律运动试题编号:20230516004532639试题类型:单选题标准答案:A试题难度:一般5.一节干电池的电压约为?()A. 1.5VB. 1000vC. 36VD. 220V试题编号:20230516004531935试题类型:单选题标准答案:A6.同一地点,以下常见物品哪个受到的重力最大?()A. 一个橡皮B. 一把尺子C. 一支铅笔D. 一张桌子试题编号:20230516004532091试题类型:单选题标准答案:D7.关于能量说法错误的是?()A. 电动机可以将电能转化为机械能B. 发电机可以将机械能转化为电能C. 冰块放在额头上,可以实现内能传递,让人感到凉快D. 能量是不能相互转化的试题编号:20230516004532201试题类型:单选题标准答案:D8.如图,该机构中主动棘爪是指?()A. aB. bC. cD. d试题编号:20230516004532905试题类型:单选题标准答案:A9.如图该机构的锁合方式为?()A. 重力锁合B. 几何锁合C. 弹力锁合D. 槽凸轮机构锁合试题编号:20230516004532466试题类型:单选题标准答案:C10.一个六足机器人,用左右两个电机分别控制左右各三足,左侧电机转速是200rpm,右侧电机转速是50rpm,则此机器人?()A. 原地左转B. 向右前方转向C. 原地右转D. 原地不动试题编号:20230516004532169试题类型:单选题标准答案:B11.如图关于该凸轮机构的从动件,说法正确的是?()A. 这是尖顶从动件B. 这是滚子从动件C. 这是平底从动件D. 这是方形从动件试题编号:20230516004532686试题类型:单选题标准答案:B12.下图为飞机起飞时的机翼示意图,说法正确的是?()A. 机翼上侧曲线弧度大于下侧B. 机翼周围没有气压C. 机翼上侧所受的气压为0D. 机翼下侧所受的气压为0试题编号:20230516004531904试题类型:单选题标准答案:A13.“木牛流马”是由谁发明的?()A. 张衡B. 祖冲之C. 诸葛亮D. 苏颂试题编号:20230516004531669试题类型:单选题标准答案:C14.下列可以产生滑动摩擦力的情形是?()A. 物体静止在桌子上B. 物体静止在斜面上C. 物体悬挂在空中D. 物体在桌面上滑动试题编号:20230516004532013试题类型:单选题标准答案:D15.如图,关于自行车说法正确的是?()A. a处采用平行四边形框架来增加结构稳定B. b处有花纹是为了减小与地面的摩擦C. c处采用了皮带传动D. c处采用了链传动试题编号:20230516004532138试题类型:单选题标准答案:D16.如图关于该凸轮机构,说法正确的是?()A. 这是槽凸轮机构B. 这是共轭凸轮机构C. 这是等径凸轮机构D. 这是等宽凸轮机构试题编号:20230516004532858试题类型:单选题标准答案:A17.如图,静止在斜面上的物体,受到的向下垂直于地面的力是?()A. 重力B. 滑动摩擦力C. 静摩擦力D. 斜面给物体的支持力试题编号:20230516004532045试题类型:单选题标准答案:A18.下图中哪个是皮带交叉传动?()A. aB. bC. cD. d试题编号:20230516004533155试题类型:单选题标准答案:C19.如图该机构中主动摆杆是指?()A. aB. bC. cD. d试题编号:20230516004532513试题类型:单选题标准答案:B20.下列哪个是摩擦式棘轮机构?()A. aB. bC. cD. d试题编号:20230516004532435试题类型:单选题标准答案:D21.可以利用传感器等获取环境信息,然后利用智能技术识别、理解、推理,最后做出规划决策,自主行动,实现预定目标的高级机器人是?()A. 示教再现型机器人B. 感知型机器人C. 智能机器人D. 工业机器人试题编号:20230516004531748试题类型:单选题标准答案:C22.下列没有采用连杆机构的是?()A. a挖掘机B. b机械臂C. c三角板D. d雨刷器试题编号:20230516004532357试题类型:单选题标准答案:C23.如图,该机构是曲柄摇杆机构,那么做左右摇摆动作的杆是?()A. aB. bC. cD. d试题编号:20230516004532936试题类型:单选题标准答案:C24.如图关于双摇杆机构,说法正确的是?()A. a是基座B. b是摇杆C. c做摇摆动作D. d是连杆试题编号:20230516004533108试题类型:单选题标准答案:C25.下图中属于外啮合棘轮机构的是?()A. aB. bC. cD. d试题编号:20230516004532560试题类型:单选题标准答案:A26.东汉时期,张衡发明了“记里鼓车”用来?()A. 测量行驶路程B. 击鼓娱乐C. 专门运送军用物资D. 表演鼓乐试题编号:20230516004531716试题类型:单选题标准答案:A27.如图这是什么机构?()A. 平行双曲柄机构B.反向双曲柄机构C.曲柄摇杆机构D. 双摇杆机构试题编号:20230516004533233试题类型:单选题标准答案:A28.如图曲柄滑块机构中哪个部分做圆周运动?()A. aB. bC. cD. d试题编号:20230516004532388试题类型:单选题标准答案:A29.如图,关于该机构说法正确的是?()A.这是凸轮机构B. 这是棘轮机构C. 这是槽轮机构D. 这是连杆机构试题编号:20230516004532811试题类型:单选题标准答案:A30.下图中哪个是槽轮机构?()A. aB. bC. cD. d试题编号:20230516004532592试题类型:单选题标准答案:A二、多选题(共5题,共20分)31.下图中哪三个选项不是单动式棘轮机构?()A. aB. bC. cD. d试题编号:20230516004532983试题类型:多选题标准答案:A|B|D32.下图凸轮机构中哪两个选项采用了盘形凸轮?()A. aB. bC. cD. d试题编号:20230516004533030试题类型:多选题标准答案:A|D33.以下属于机器人组成部分的有?()A. 机械部分B. 传感部分C. 控制部分D. 人类外形试题编号:20230516004531857试题类型:多选题标准答案:A|B|C34.下列哪两项是滑动摩擦力的产生条件?()A. 两个物体相互接触B. 两个物体发生相对运动C. 两个物体颜色一致D. 两个物体气味一致试题编号:20230516004532248试题类型:多选题标准答案:A|B35.如图,说法正确的是?()A. 这是齿轮传动B. ab两轮转向相反C. 这是皮带平行传动D. 这是皮带交叉传动试题编号:20230516004533280试题类型:多选题标准答案:B|D三、判断题(共10题,共20分)36.电能不可以转化为机械能。
2023年12月青少年机器人技术等级考试理论综合试卷二级(含答案)

2023年12月青少年机器人技术等级考试理论综合试卷二级(含答案)分数:100 题数:45一、单选题(共30题,共60分)1.下图中,能够将圆周运动转化为往复摆动的是?(D)A. aB. bC. cD. d2.如图,该机械结构可实现的运动方式为?(C)A. 往复摆动B. 单向持续转动C. 单向间歇性运动D. 双向持续转动3.下列不属于凸轮机构的从动件的是?(C)A. 尖顶从动件B. 滚子从动件C. 三角从动件D. 平底从动件4.下列选项使用了摆动型从动件的是?(D)A. aB. bC. cD. d5.智能机器人属于第几代机器人(C)A. 第一代B. 第二代C. 第三代D. 第四代6.如图,关于该机构说法正确的是?(A)A. 这是反向双曲柄机构B. a和b的旋转方向相同C. 这是棘轮机构D. 这是滑杆机构7.如图,关于该机构说法正确的是?(D)A. 属于外啮合棘轮B. 属于内啮合棘轮C. 属于凸轮机构D. 属于槽轮机构8.凸轮按形状分类,不包括?(C)A. 盘形凸轮B. 移动凸轮C. 尖顶凸轮D. 圆柱凸轮9.我们在设计行走机器人的机械腿的时候,经常要考虑以下哪种机构?(D)A. 凸轮机构B. 齿轮机构C. 棘轮机构D. 连杆机构10.下列不属于连杆机构特点的是?(D)A. 低副接触耐磨损B. 设计比较复杂C. 制造简单易于获得较高的制造精度D. 可以实现复杂的运动规律11.如图,该机构为?(A)A. 曲柄滑块机构B. 滑杆机构C. 曲柄摇杆D. 双摇杆机构12.关于电动机,说法正确的是?(A)A. 把电能转化为机械能B. 把势能转化为动能C. 把电能转化为生物能D. 把生物能转化为潮汐能13.该机构属于哪种棘轮机构?(C)A. 摩擦式棘轮机构B. 外啮合棘轮机构C. 内啮合棘轮机构D. 双动式棘轮机构14.关于木牛流马,说法错误的是?(C)A. 是由诸葛亮发明的B. 是用来运送军粮的C. 能够计量车的行驶里程D. 是古代的军用机器人15.如图,向两张纸中间吹风,说法正确的是?(B)A. 两张纸向外分离B. 两张纸向中间并拢C. 两张纸静止不动D. 两张纸都左右摆动16.凸轮机构中从动件的运动规律取决于?(C)A. 凸轮旋转转速B. 凸轮大小C. 凸轮轮廓曲线D. 凸轮颜色17.张衡发明“记里鼓车”用来(A)A. 计算车行驶路程B. 表演击打乐器C. 运输军用物资D. 指示方位18.关于重力,说法正确的是?(D)A. 方向竖直向上B. 方向不能确定C. 一个苹果和一个西瓜的重力大小相等D. 作用点是在物体的重心19.以下哪个不是机器人常见的驱动方式?(D)A. 液压驱动B. 气压驱动C. 电力驱动D. 手动驱动20.自行车轮胎或汽车的轮胎上都有花纹,是为了?(A)A. 增大与地面间的摩擦,防止打滑B. 美观C. 降低生产成本D. 便于维修保养21.中国的家用电压是多少伏?(D)A. 110C. 500D. 22022.一辆八轮装甲车,左侧四个轮子转速是100rpm,右侧四个轮子转速是200rpm,则此装甲车(B)A. 向前直走B. 向左前方转向C. 向右前方转向D. 原地不动23.一个方块在斜面上下滑的过程中受到的力不包括?(C)A. 重力B. 滑动摩擦力C. 滚动摩擦力D. 支持力24.下列关于影响滑动摩擦力大小的因素,说法正确的是?(D)A. 与物体体积大小有关B. 与物体运动方向有关C. 与物体的颜色有关D. 与接触面的粗糙程度有关25.下图中哪个是皮带交叉传动(C)A. aB. bC. cD. d26.有时瓶盖拧不开,隔着毛巾拧就能拧开主要是因为?(A)A. 毛巾粗糙能增大摩擦力B. 毛巾粗糙可以减小摩擦力C. 毛巾能让力气变大D. 毛巾能排除瓶盖周围的空气27.自行车主要应用了哪种机构传动?(B)B. 传动链C. 皮带D. 槽凸轮28.以下装置中,动力传递会产生延迟的是哪个?(A)A. 皮带传动B. 齿轮传动C. 链条传动D. 曲柄连杆29.以下哪项是皮带传动的优点?(C)A. 传动力小B. 容易破损C. 能缓冲吸振D. 相对齿轮传动更精确30.以下哪项是齿轮传动的特点?(D)A. 传动力小B. 传动噪音小C. 能缓冲吸振D. 相对皮带传动更精确二、多选题(共5题,共20分)31.下列属于典型棘轮机构组成的是(ABCD)A. 主动摆杆B. 主动棘爪C. 止回棘爪D. 棘轮32.凸轮机构主要由哪些部件组成(ABC)A. 凸轮B. 基座或机体C. 从动件D. 主动摆杆33.链传动的特点有哪些?(ABC)A. 适用于远距离传动B. 可以精确地传递动力C. 传动链长度可以调节D. 可任意角度啮合34.下列图片是间歇运动机构的有哪些?(ABD)A. aB. bC. cD. d35.如图,关于飞机机翼的截面图,说法正确的有哪些?(AC)A. 机翼上侧气流速度快B. 机翼下侧气流速度快C. 机翼上侧气压低D. 机翼下侧气压低三、判断题(共10题,共20分)36.曲柄摇杆机构中曲柄做圆周运动。
2023.09全国青少年机器人技术等级考试理论实操试卷(二级)

青少年机器人技术等级考试理论综合试卷(二级)分数:100 题数:45一、单选题(共30题,共60分)如图,关于该机构说法正确的是?()1.试题编号:20230901035423340试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:如图一辆小汽车停在陡坡上,下列哪个不是它受到的力?()2.试题编号:20230901035422559试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:3. 智能机器人属于第几代机器人?()试题编号:20230901035423893试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:下图中哪个是曲柄摇杆机构?()4.试题编号:20230901035423762试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:如图曲柄滑块机构中哪个部分在既定的轨道上滑动?()5.试题编号:20230901035422918试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:6.如图,鞋底有花纹是为了?( )试题编号:20230901035422637试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:7. “公输子削木为鹊”的典故记载的是?( )试题编号:20230901035422246标准答案:B试题难度:试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:如图关于该机构说法正确的是?()8.试题编号:20230901035423200试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:如图下列哪个是单动式棘轮机构?()9.试题编号:20230901035422996标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:如图,该机构中棘轮是指?()10.试题编号:20230901035423434试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:如图,下列哪个凸轮机构采用了平底型从动件?()11.试题编号:20230901035423465试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:如图关于反向双曲柄说法正确的是?()12.试题编号:20230901035423637试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:下图中的凸轮机构使用了摆动型从动件的是?()13.试题编号:20230901035423246试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:14. 自行车链属于哪种传动方式的一部分?()试题编号:20230901035423684试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:如图,挖掘机的机械臂采用了哪种机构?()15.试题编号:20230901035422871试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:16. 人体最大的安全电压约为?()试题编号:20230901035422434试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:17. 诸葛亮发明的“木牛流马”用来?()试题编号:20230901035422199试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:如图该机构中主动摆杆是指?()18.试题编号:20230901035423043试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:下列哪个选项是摩擦式棘轮机构?()19.试题编号:20230901035422950试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:下图中属于内啮合棘轮机构的是?()20.试题编号:20230901035423074试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:如图关于该凸轮机构说法正确的是?()21.试题编号:20230901035423387试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:22. 以下不能准确传递动力的是?()试题编号:20230901035423715试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:如图关于该机构说法正确的是?()23.试题编号:20230901035423293试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:B考生得分:0是否评分:已评分评价描述:24. 在曲柄滑块机构中的曲柄做什么动作?()试题编号:20230901035423153试题类型:单选题标准答案:B试题难度:试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:25. 关于重力说法正确的是?()试题编号:20230901035422512试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:26. 关于能量说法错误的是?()试题编号:20230901035422715试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:下图中哪个不是槽轮机构?()27.试题编号:20230901035423121试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分 评价描述:28.下图为飞机起飞时的机翼示意图,说法正确的是?( )试题编号:20230901035422403试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:C考生得分:0是否评分:已评分 评价描述:29. 一个机器人,用左右两个电机分别控制左右足,左侧电机转速是200rpm ,右侧电机转速是0 rpm ,则此机器人?( )试题编号:20230901035422684试题类型:单选题标准答案:A试题难度:试题解析:考生答案:B考生得分:0是否评分:已评分 评价描述:30. 通常下列常见物品哪个受到的重力最小?()试题编号:20230901035422590试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:二、多选题(共5题,共20分)下图凸轮机构中哪两个是盘形凸轮?()31.试题编号:20230901035423559试题类型:多选题标准答案:B|D试题难度:一般试题解析:考生答案:B|D考生得分:4是否评分:已评分评价描述:下图中哪三个选项是不完全齿轮机构?()32.试题编号:20230901035423512试题类型:多选题标准答案:A|B|C试题难度:一般试题解析:考生答案:A|B|C考生得分:4是否评分:已评分评价描述:33. 下列会产生静摩擦力的选项有哪些?()试题编号:20230901035422356试题类型:多选题标准答案:A|C试题难度:试题解析:考生答案:C|D|B考生得分:0是否评分:已评分评价描述:34. 下列哪两项是静摩擦力的产生条件?()试题编号:20230901035422746试题类型:多选题标准答案:A|B试题难度:试题解析:考生答案:D|B|A考生得分:0是否评分:已评分评价描述:如图说法正确的有哪些?()35.试题编号:20230901035423793试题类型:多选题标准答案:B|D试题难度:一般试题解析:考生答案:B|D考生得分:4是否评分:已评分评价描述:三、判断题(共10题,共20分)36. 皮带传动中两个带轮的转向一定相同。
全国青少年机器人技术等级考试理论综合试卷(二级)

全国青少年机器人技术等级考试考试试卷(二级)一、单选题(共30题,每题2分,共60分)1.下列关于机器人三定律的说法正确的是()A.是俄国的阿西莫夫提出的B.最早公布于于美国的官方新闻网站CNNC.“在任意情况下听从人类命令”是第一纲领D.是一道伦理性纲领标准答案:D分数:22.目前发展的第三代机器人属于()A.示教型机器人B.智能型机器人C.智慧型机器人D.感知型机器人标准答案:B分数:23.据载诸葛亮制造的用于运送军粮的机器人是()A.木牛流马B.机器马车C.记里鼓车D.载粟木车标准答案:A分数:24.在人机大战中多次战胜大师的阿尔法狗是()A.会下围棋的智能机器人B.会写书法的智能机器人C.会跳绳的智能机器人D.会用两条腿跑步的智能机器人标准答案:A分数:25.下列机器人是军用机器人的是()A.英国制造的有跳动心脏的机器人REXB.美国生产的BigDog大狗机器人C.能像人一样行走的机器人ASIMOD.机器人救生员E.M.I.L.Y.标准答案:B分数:26.以下不属于机器人的必要组成部分的是()A.输入设备B.输出设备C.主控制器D.机械手臂标准答案:D分数:27.机器人的CPU和电源相当于人的()A.大脑和躯干B.心脏和手臂C.大脑和心脏D.手臂和大脑标准答案:C分数:28.机器人语言是二进制组成的字串机器码,数字范围是()A.0到15B.0到9C.0到7D.0到1标准答案:D分数:29.以下机器人的常用驱动方式不包括()A.电力驱动B.水驱动C.液压驱动D.气压驱动标准答案:B分数:210.相互接触的物体发生相对运动时,在接触面产生的阻碍相对运动的力叫做()A.摩擦力B.支持力C.弹力D.重力标准答案:A分数:211.A.重力B.支持力C.摩擦力D.以上都是标准答案:D分数:212.功的大小是力乘以力的方向上移动的距离,下列做功最小的是()A.小明大力推50斤的水桶,水桶没有动B.妈妈把50斤的水桶推动了0.3米C.爸爸把50斤的小明举过头顶D.机器人把100斤的重物抬上3米高的货架标准答案:A分数:213.荡秋千时关于能量的说法下列正确的是()A.在最低点时,速度最快,能量最大B.最高点时能量为0C.最低点和最高点的总能量相等D.在最低点时动能最小标准答案:C分数:214.关于空气的说法正确的是()A.飞机飞行时机翼的上侧气流速度慢于下侧B.飞行时机翼上下侧的压力差为0C.气流越快,压力越大D.地铁进站时站在黄线外是因为火车带动气流加快,压力变小,人容易被”吸入“铁轨标准答案:D分数:215.关于杠杆平衡正确的是()A.杠杆两侧受力大小相等B.两侧力的作用线到支点的距离乘以力的大小的值相等C.天平不是杠杆D.杠杆平衡必须两侧的施力点到支点的距离相等标准答案:B分数:216.下列滑轮组最省力的是()A.AB.BC.CD.D标准答案:D分数:217.下图小齿轮10齿,大齿轮100齿,由下方大齿轮为主动轮,则齿轮组的传动比为()A.1:100B.1:10C.100:1D.10000:1标准答案:A分数:218.舂米机能够做间歇的敲打的原因是具有哪种机构()A.杠杆机构B.连杆机构C.凸轮机构D.棘轮机构标准答案:C分数:219.下图机构中凸轮旋转周期为20秒,小轮的半径是2,上方从动杆顶起的周期是()A.20秒B.10秒C.2秒D.5秒标准答案:A分数:220.下列应用了连杆机构的是()A.三角板B.高尔夫球杆C.螺旋桨D.雨刷器标准答案:D分数:221.下列杆机构说法错误的是()A.连杆可以做摇摆运动B.连杆不能做圆周运动C.汽车的转向装置用了连杆机构D.行走机器人大多采用连杆机构标准答案:B分数:222.下列属于发动机曲柄连杆机构的是()A.机体组B.活塞连杆组C.曲轴飞轮组D.以上都是标准答案:D分数:223.对于汽车的曲柄连杆机构描述正确的是A.由曲柄直接带动活塞转动B.由活塞带动连杆转动C.由曲柄带动连杆,连杆带动活塞转动D.以上都不对标准答案:C分数:224.下列关于曲柄滑块的应用正确的是()A.往复活塞式发动机B.压缩机主机C.冲床主机D.以上都是标准答案:D分数:225.下图曲柄滑块机构中作圆周运动的部件和做往复运动的部件分别是()A.较短的竿和较长的竿B.较短的竿和蓝色滑块C.较长的竿和较短的竿D.蓝色滑块和较短的竿标准答案:B分数:226.下列模型中采用了棘轮机构的是()A.机械尺蠖B.舂米机C.秋千D.直升机标准答案:A分数:227.以下关于棘轮的说法错误的是()A.外啮合棘轮加工和维修方便B.内啮合棘轮外形尺寸大C.摩擦式棘轮传动平稳、噪音小D.棘轮机构的主要作用是间歇送进、制动和超越标准答案:B分数:228.关于电机的说法正确的是()A.电机分为直流电机和交流电机B.电机又被称为“马达”C.电机将电能转化为机械能D.以上都正确标准答案:D分数:229.下列关于传动方式正确的是()A.齿轮传动的精密度高于皮带传动B.皮带传动的噪音大C.链传动中采用的传动链不可拆卸D.在稻草人模型中主要采用了链传动标准答案:A分数:230.下列不能实现间歇运动的机构是()A.棘轮机构B.不完全齿轮机构C.凸轮机构D.全齿轮机构标准答案:D分数:2二、多选题(共10题,每题2分,共20分)31.下列哪些是军用机器人的功能()A.清洁卧室B.手术缝合C.运送物资D.侦查地形标准答案:C|D分数:232.工业机器人的特点包括()A.能够适应恶劣的工作环境B.能够长时间高强度工作C.工作具有高精密度D.具有亲和力,能与各个年龄段的人类交流标准答案:A|B|C分数:233.机器人的CPU要求()A.体积小B.处理数据快C.可靠性高D.制造工艺复杂标准答案:A|B|C分数:234.下列关于汽车的说法正确的是()A.变向装置采用了连杆机构B.发动机应用了曲柄连杆机构C.方向盘应用了轮轴机构D.刹车应用了摩擦原理标准答案:A|B|C|D分数:235.关于凸轮的分类正确的是()A.按外形分为盘形凸轮、移动凸轮、圆柱凸轮B.按从动件分为顶尖式、滚子式、平底式、曲底式C.按从动件运动方式分为直动式、摆动式D.按凸轮与从动件接触方式分为力锁和、几何锁和标准答案: A|B|C|D分数:236.平面四杆能够达到的输出结果有()A.圆周运动B.摇摆运动C.反向圆周运动D.间歇运动标准答案:A|B|C分数:237.下列图片中采用了连杆机构的的有()A.B.C.D.标准答案:B|C|D分数:238.下列物品采用了棘轮的有()A.钓鱼杆B.机械尺蠖C.千斤顶D.自行车标准答案: A|B|C|D分数:239.下列结构在六足机器人模型中应用的有()A.连杆机构B.凸轮机构C.曲柄机构D.棘轮机构标准答案:A|C分数:240.制造一个机器人使他有转向装置,并且只能向前不能退后,需要采用的机构有()A.连杆机构B.杠杆结构C.棘轮机构D.滑轮组标准答案:A|C分数:2三、判断题(共10题,每题2分,共20分)41.记里鼓车是中国古代的机器人,主要作用是敲鼓供人们娱乐。
全国青少年机器人技术等级考试-二级理论模拟题(A卷)

全国青少年机器人技术等级考试-二级理论模拟题(A卷)着他一起向前运动。
1.( B )被称为“工业机器人之父”。
A. 阿西莫夫B. 英格伯格C. 诺伯特D. 弗里茨2.下面哪个不是机器人系统的基本结构?(B)(基本结构有:机械本体、驱动伺服单元、计算机控制系统、传感器系统、输出输出系统接口)A. 机械本体。
B. 人。
C. 计算机控制系统。
D. 传感系统。
3.工业机器人出现是在(C)世纪。
A. 18B. 19C. 20D. 214.( C )决定了从动件预定的运动规律。
A. 凸轮转速。
B. 凸轮大小。
C. 凸轮轮廓曲线。
D. 凸轮形状。
5.一节普通干电池电压是多少伏?(C. 1.5V)A. 0.8B. 1.0C. 1.5D. 2.06.机器人三定律由谁提出?(美国科幻作家艾萨克•阿西莫夫)A. 美国科幻家艾萨克•阿西莫夫。
(在《环舞》短篇小说中提出机器人三定律)B. 乔治•德沃尔。
(工业机器人先驱,创造世界第一台可编程机器人--尤尼梅特)C. 意大利作家卡洛•洛伦齐尼。
(写出《匹诺曹》)D. 捷克剧作家卡尔•恰佩克。
(在戏剧创造出“机器人”一词)7.下列哪个用到凸轮结构?(A)A. 发动机。
B. 跷跷板。
C. 显示器。
D. 拉杆箱。
8.机器人的英文单词是?(C)A. BoterB. RebotC. RobotD. Botre9.中国在哪年首次举办机器人世界杯?(2008年6月)A. 1999B. 2004C. 2006D.200810.随着电子电力的发展,机器人也越来越多样化,想实现机器人精密控制,对电机的要求有。
(B)A. 体积大。
B. 体积小、高速高精度。
C. 价格昂贵。
D. 没什么要求。
11.下列做法正确的是?(B)A. 用湿手触摸电器。
B. 家用通电电线有裸露的线头,不能用手碰。
C. 用湿布擦拭电器。
D. 发现漏电后立即拿水泼。
12.1831年,谁发现了电磁感应原理,奠定了发电机的理论基础。
青少年机器人技术等级考试理论综合试卷(二级)202206.

青少年机器人技术等级考试理论综合试卷(二级)分数:100 题数:45一、单选题(共30题,共60分)我们常用到的5号电池,它的电压是?()1.A. 1.5VB. 3VC. 36VD. 220V试题编号:-zr02-01试题类型:单选题标准答案:A试题难度:容易试题解析:生活中一节5号(或7号)电池的电压是1.5V;家用电器电压通常为220V。
考生答案:C考生得分:0是否评分:已评分评价描述:以下哪种方式可以实现遥控小车左转?()2.A. 左轮前进,右轮后退B. 左轮后退,右轮前进C. 左轮前进,右轮停转D. 左右轮均前进试题编号:-zr02-03试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:骑自行车的人遇到紧急情况刹车时,用力捏闸的目的是?()3.A. 增大压力以增大摩擦B. 使接触面粗糙以增大摩擦C. 减小摩擦D. 使接触面光滑来增大摩擦试题编号:-zr02-05试题类型:单选题标准答案:A试题难度:一般试题解析:用力捏闸是增大压力来增大摩擦使自行车停下来。
考生答案:A考生得分:2是否评分:已评分评价描述:4下列属于连杆机构的是?().A. aB. bC. cD. d试题编号:-zr02-06试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:5下列哪个是反向双曲柄机构?().A. aB. bC. cD. d试题编号:-zr02-10试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:下列哪个是内啮合棘轮机构?()6.A. aB. bC. cD. d试题编号:-zr02-11试题类型:单选题标准答案:A试题难度:容易试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:下图为尺蠖,搭建一个机械尺蠖为了使其只能向前运动,下列选项正确的是?()7.A. 一般使用凸轮机构B. 一般使用滑轮C. 一般使用棘轮机构D. 一般会使用皮带试题编号:-zr02-12试题类型:单选题标准答案:C试题难度:一般试题解析:机械尺蠖向前运动时,类似于棘轮结构,是将圆周运动转化为直线运动,使之可以实现一个方向的运动。
全国青少年机器人技术等级考试-二级理论模拟题(A卷)
机器人二级理论考试模拟题(A卷)(满分100分)一、单选题(每题2分,共30题)1.下列人物中,哪位发明了电灯?(C.爱迪生)A. 牛顿B. 熊大C. 爱迪生D. 爱因斯坦2.首届机器人世界杯在哪举办?(日本名古屋)A. 法国B. 日本C. 美国D. 英国3.机器人控制系统从基本原理和系统结构上可以分成哪两类?(A)A. 非伺服型系统和伺服型系统。
B. Windows系统和苹果系统。
C. 仿真型系统和非仿真型系统。
D. 大系统和小系统。
4.下列说法正确的是?(A)A. 凸轮机构一般有凸轮、从动件和机架三个构件组成。
B. 凸轮机构一般有凸轮、主动从件和机架三个构件组成。
C. 凸轮机构一般有凸轮、从动件和主动件三个构件组成。
D. 凸轮机构一般有圆轮、从动件和主动件三个构件组成。
5.下列事物中,有曲柄装置的是(A)A. 自行车B. 自动晾衣架C. 电视机D. 以上都有6.火车在长直的轨道上匀速行驶,门窗紧闭的车厢内有一人向上跳起,发现仍落回原地,这是因为?(C)A. 人跳起厚,车厢内空气推着他向前运动。
B. 人跳起到落地时间过短,偏后的距离看不出来。
C. 人跳起到落地,在水平方向上人与车有相同的速度。
D. 人跳起瞬间,地板给人一个向前的力,推着他一起向前运动。
7.(B )被称为“工业机器人之父”。
A. 阿西莫夫B. 英格伯格C. 诺伯特D. 弗里茨8.下面哪个不是机器人系统的基本结构?(B)(基本结构有:机械本体、驱动伺服单元、计算机控制系统、传感器系统、输出输出系统接口)A. 机械本体。
B. 人。
C. 计算机控制系统。
D. 传感系统。
9.工业机器人出现是在(C)世纪。
A. 18B. 19C. 20D. 2110.(C )决定了从动件预定的运动规律。
A. 凸轮转速。
B. 凸轮大小。
C. 凸轮轮廓曲线。
D. 凸轮形状。
11.一节普通干电池电压是多少伏?(C. 1.5V)A. 0.8B. 1.0C. 1.5D. 2.012.机器人三定律由谁提出?(美国科幻作家艾萨克•阿西莫夫)A. 美国科幻家艾萨克•阿西莫夫。
全国青少年机器人技术等级考试二级考试题库与答案

全国青少年机器人技术等级考试二级考试题库一、选择题1、中国在哪一年首次举办机器人世界杯(). [单选题] *2、下面哪个机器人会说话(). [单选题] *3、机器人的定义中,突出强调了(). [单选题] *4、国际上最具有影响力的两大世界杯机器人足球赛是什么(). [单选题] *5、机器人的能力评测不包括(). [单选题] *6、谁发现了电流(). [单选题] *7、首届机器人世界杯在哪一年举办的(). [单选题] *8、关于机器人比赛,下列说法不正确的是(). [单选题] *9、下列说法正确的是(). [单选题] *10、关于运动与力的关系,下列说法正确的是(). [单选题] *12、为什么人不可以离高压电线太近(). [单选题] *13、目前世界正在研究的“智能机器人”属于第几代机器人(). [单选题] *16、为了保证棘爪能够顺利进入棘轮轮齿的齿根,齿面偏斜角与齿面摩角间的关系是(). [单选题] *17、下列哪个应用到了曲柄机构(). [单选题] *18、起重机正吊着一些材料匀速上升,突然材料中掉落了一个,则它掉落后会(). [单选题] *19、关于电机的说法不正确的是(). [单选题] *20、下列说法错误的是(). [单选题] *23、功的计算公式是(). [单选题] *24、功率和功的单位是(). [单选题] *25、当直升机旋翼转动时产生了哪个方向的力?(). [单选题] *26、直升机的尾浆起什么作用?(). [单选题] *27、. 汽车向前行驶时,轮子转动产生的力是哪个方向?(). [单选题] *28、直升机的升力往哪个方向?[单选题] *A、*B、C、D、29、仅参考地球和月亮的转动关系为(). [单选题] *30、世界第一台双脚走路的机器人是哪个国家发明的?(). [单选题] *31、谁被誉为“仿人机器人之父”?(). [单选题] *32、木牛流马是谁发明的?(). [单选题] *33、前驱车的发动机位置在哪里?(). [单选题] *A.*B.C.D.34、第一台工业机器人是什么驱动方式?(). [单选题] *36、阿尔法狗是什么机器人?(). [单选题] *37、第一台可编程机器人是谁制造的?(). [单选题] *41、机器人的驱动方式(). *42、下列哪个事物运用了棘轮机构(). *43、棘轮机构中,止回棘爪在工作中有什么作用(). *44、智能机器人主要包括哪些方面(). *45、关于能量的说法不正确的是(). *46、力的三要素有哪些(). *47、机器人的传感器应该具有哪些要求(). *48、医用机器人具有哪些特点(). *49、棘轮机构的主要用途(). *50、电机装置的供电方式分为哪几种?(). *51、前驱车的优点有哪些?(). *52、棘轮机构分为哪几种?(). *53、摩擦力分为哪几类?(). *54、前驱车的优点有哪些?(). *55、下列哪些属于凸轮机构?(). *A.*B.*C.D.*56、力锁合一般有哪几种?(). *57、简单电路中必须要具有哪些物体?(). *58、串联电路的特点(). *59、机器人“恐怖谷理论”人为当机器人与人类相似度超过95%时,人类就会对机器人产生情感变化(). [单选题] *60、感知型机器人是第一代机器人(). [单选题] *61、机器人能够代替人类完成一切工作(). [单选题] *62、机器人通过传感器接收外界信息进行分析、判断、处理,下达执行命令(). [单选题] *63、感知型机器人是第二代机器人。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人二级理论考试模拟题(A卷)(满分100分)一、单选题(每题2分,共30题)1.下列人物中,哪位发明了电灯?(C.爱迪生)A. 牛顿B. 熊大C. 爱迪生D. 爱因斯坦2.首届机器人世界杯在哪举办?(日本名古屋)A. 法国B. 日本C. 美国D. 英国3.机器人控制系统从基本原理和系统结构上可以分成哪两类?(A)A. 非伺服型系统和伺服型系统。
B. Windows系统和苹果系统。
C. 仿真型系统和非仿真型系统。
D. 大系统和小系统。
4.下列说法正确的是?(A)A. 凸轮机构一般有凸轮、从动件和机架三个构件组成。
B. 凸轮机构一般有凸轮、主动从件和机架三个构件组成。
C. 凸轮机构一般有凸轮、从动件和主动件三个构件组成。
D. 凸轮机构一般有圆轮、从动件和主动件三个构件组成。
5.下列事物中,有曲柄装置的是(A)A. 自行车B. 自动晾衣架C. 电视机D. 以上都有6.火车在长直的轨道上匀速行驶,门窗紧闭的车厢内有一人向上跳起,发现仍落回原地,这是因为?(C)A. 人跳起厚,车厢内空气推着他向前运动。
B. 人跳起到落地时间过短,偏后的距离看不出来。
C. 人跳起到落地,在水平方向上人与车有相同的速度。
D. 人跳起瞬间,地板给人一个向前的力,推着他一起向前运动。
7.(B )被称为“工业机器人之父”。
A. 阿西莫夫B. 英格伯格C. 诺伯特D. 弗里茨8.下面哪个不是机器人系统的基本结构?(B)(基本结构有:机械本体、驱动伺服单元、计算机控制系统、传感器系统、输出输出系统接口)A. 机械本体。
B. 人。
C. 计算机控制系统。
D. 传感系统。
9.工业机器人出现是在(C)世纪。
A. 18B. 19C. 20D. 2110.(C )决定了从动件预定的运动规律。
A. 凸轮转速。
B. 凸轮大小。
C. 凸轮轮廓曲线。
D. 凸轮形状。
11.一节普通干电池电压是多少伏?(C. 1.5V)A. 0.8B. 1.0C. 1.5D. 2.012.机器人三定律由谁提出?(美国科幻作家艾萨克•阿西莫夫)A. 美国科幻家艾萨克•阿西莫夫。
(在《环舞》短篇小说中提出机器人三定律)B. 乔治•德沃尔。
(工业机器人先驱,创造世界第一台可编程机器人--尤尼梅特)C. 意大利作家卡洛•洛伦齐尼。
(写出《匹诺曹》)D. 捷克剧作家卡尔•恰佩克。
(在戏剧创造出“机器人”一词)13.下列哪个用到凸轮结构?(A)A. 发动机。
B. 跷跷板。
C. 显示器。
D. 拉杆箱。
14.机器人的英文单词是?(C)A. BoterB. RebotC. RobotD. Botre15.中国在哪年首次举办机器人世界杯?(2008年6月)A. 1999B. 2004C. 2006D.200816.随着电子电力的发展,机器人也越来越多样化,想实现机器人精密控制,对电机的要求有。
(B)A. 体积大。
B. 体积小、高速高精度。
C. 价格昂贵。
D. 没什么要求。
17.下列做法正确的是?(B)A. 用湿手触摸电器。
B. 家用通电电线有裸露的线头,不能用手碰。
C. 用湿布擦拭电器。
D. 发现漏电后立即拿水泼。
18.1831年,谁发现了电磁感应原理,奠定了发电机的理论基础。
(C.法拉第)A. 爱迪生。
B. 牛顿。
C. 法拉第。
D. 爱因斯坦。
19.成年人人体安全电压是多少伏?(36V)A. 12V。
B. 24V。
C. 36V。
D. 48V。
20.中国在什么时候开始对现代机器人开始研究。
(B.20世纪70年代)A. 20世纪60年代。
B. 20世纪70年代。
C. 20世纪80年代。
D. 20世纪90年代。
21.下面哪个机器人会说话?(C.菲比娃娃)A. 但丁机器人。
(八脚机器人,探索火山)B. 探路者机器人。
(探索火星)C. 菲比娃娃机器人。
(会说话)D. 谢克机器人。
(第一台移动机器人)22.关于电流形成的说法,正确的是?(B.电荷的定向运动形成了电流)A. 电荷的运动形成了电流。
B. 电荷的定向运动形成了电流。
C. 电荷的杂乱无章运动形成了电流。
D. 电荷静止不动形成了电流。
23.凸轮转速的高低,决定了(A)运动的快慢A. 从动杆B. 轮子C. 链条D. 以上都没有影响24.机器人的定义中,突出强调的是?(D模仿人的功能)A. 具有人型。
B. 感知能力强。
C. 像人一样的活着。
D. 模仿人的功能。
25.下列不是凸轮结构的优点是哪个?(C)A. 结构简单。
B. 结构紧凑。
C. 接触点、线不易磨损。
D. 结构设计方便。
26.国际上最具影响力的两大世界杯机器人足球赛是什么?(B)A. 奥运会B. RobotCup/FIRAC. FIFAD. 欧洲杯27.机器人能力评价不包括哪个?(C)A. 智能。
B. 机能。
C. 生物能。
D. 活动范围。
28.步行机器人的行走机构多为?(A)A. 连杆机构。
B. 齿轮机构。
C. 履带。
D.以上说法都不正确29.1966年谢克机器人诞生,关于谢克机器人下面说法正确的是?(D.第一台移动机器人)A. 第一台潜水机器人。
B. 第一台飞行机器人。
C. 第一防水机器人。
D. 第一台移动机器人。
30.关于机器人“恐怖谷理论”,下面说法正确的是?(D)A. 由美国机器人专家提出。
B. 人类不喜欢机器人。
C. 机器人不喜欢人类。
D. 随着机器人的拟人程度增加,人类对它的好感度就会改变。
二、多选题(每题2分,共10题)1.下面哪些是机器人三定律?(A、B、C)A. 机器人不得伤害人类,或坐视人类受到伤害。
B. 除非违背第一法则,机器人必须服从人类的命令。
C. 在不违背第一及第二法则下,机器人必须保护自己。
D. 机器人可以偶尔伤害人类。
2.机器人驱动方式有?(ACD)A. 电力驱动。
B. 人力驱动。
C. 液压驱动。
D. 气压驱动。
3.下列有关凸轮特点说法正确的是?(ABD)A. 凸轮的外廓形状取决于从动件的运动规律。
B 凸轮机构能高速启动,动作准确可靠。
C. 凸轮机构属性低副接触,传动力不宜过大。
D. 容易磨损,不能保持良好发润滑。
4.典型棘轮机构由哪些构件组成?(ABCD)A. 棘轮。
B. 摆杆。
C. 止回棘爪。
5.下列哪些应用到棘轮机构?(BC)A. 缝纫机。
B. 千斤顶。
C. 自行车。
D. 六角车床。
6.曲柄连杆机构主要由哪些组成?(BCD)A. 圆环组。
B. 机体组。
C. 活塞连杆组。
D. 曲轴飞轮组。
7.2004年初,美国两架火星探测车成功登录,包括下面哪个?(BC)A. 神奇号。
B. 机遇号。
C. 勇气号。
D. 好奇号。
8.下列关于滑杆运动方式的说法正确的是?(ABC)A. 回转体作回转运动。
B. 滑块从动。
C. 滑杆绕固定轴转动。
D. 滑杆翻转运动。
9.服务机器人主要从事工作有?(ACD)A. 清洁B. 焊接C. 监护D. 保安10.凸轮一般按外形可为三类,主要有哪些?(ABD)A. 盘形凸轮。
B. 移动凸轮。
C. 椭圆凸轮。
三、判断题(每题2分,共10题)1.第十二届机器人世界杯在中国举办。
(正确)2.机械手不能称为机器人。
(错误)3.凸轮转速的高低,影响从动杆的运动规律。
(错误)4.曲柄摇杆机构能使整周回转运动变为往复摆动,但不能把往复摆动变为整周回转运动。
(错误,都能)5.“机器人”就一定是人型的。
(错误)6.世界第一台可编程机器人叫“尤尼梅特”。
(正确)7.古时候的花轿用到了滑杆原理。
(正确)8.凸轮在机构中经常是主动件。
(正确)9.棘轮机构按结构形式分类可分为齿式棘轮机构和摩擦式棘轮机构。
(正确)10.自行车没有曲柄结构。
(错误)。