自动控制原理作业4
自动控制原理参考答案-第4章

d) 与虚轴交点:
特征方程: s3 + 2s2 + (2 + Kg )s + 3Kg = 0
s3
1
2+ Kg
s2
2
3Kg
s1 2 − 0.5Kg
s0
3Kg
当 Kg = 4 时, 2s2 +12 = 0 ⇒ s = ±2.45 j
e) 出射角: βsc = ±180(1+ 2n) − ∑ β + ∑α
s3
1
7
s2
2
Kg −10
s1 12 − 0.5Kg
s0 Kg −10
当 Kg = 24 时, 2s2 +14 = 0 ⇒ s1,2 = ±2.65 j
劳斯表的 s0 行为正 ⇒ Kg > 10 ,即10 < Kg < 24 根轨迹如下图:
题 4-6:已知负反馈控制系统的开环传递函数为
G(s)H(s)
b) 根轨迹趋向: n − m≥ 2 ,则极点-5,-10 之间的根轨迹向右渐进.
c)
渐近线: ⎧⎪⎨ϕk
=
±180(1 + 2
2n)
=
±90o
⎪⎩−σ k = −6.5
d) 分离点与会合点:令 ∂Kg = 0 ∂s
即: 2s3 + 21s2 + 60s +100 = 0 ⇒ s1 = −7.34 ; s2,3 = −1.5794 ± 2.0776j (舍去) 根轨迹如下图:
(4) 稳态速度误差系数是多少?
(5) 系统指标比该点的二阶指标大还是小?如果要求系统有该点二阶指标
的超调量,能否通过改变阻尼线而获得?是增大阻尼比还是减小它?
自动控制原理课后习题第四章答案

G(s)H(s)=
Kr s(s+1)(s+3)
σ根 s=3-K+ω轨r4-3-迹+p4s132ω1-3的+~3ω32分p===s2-离+001K点.p-3r=3:KK~0θrr===012+ωω6021,o=3,=0+±1810.7o
8
jω
1.7
s1
A(s)B'系(s)统=根A'轨(s迹)B(s)
s3 p3
s=sK2±r没=j24有.8.6位×于2K.r根6=×4轨80.迹6=上7,. 舍去。
2
第四章习题课 (4-9)
4-9 已知系统的开环传递函数,(1) 试绘制出
根轨迹图。
G(s)H与(s虚)=轴s交(0点.01s+1K)(系0.统02根s+轨1迹)
jω
70.7
解: GKK(rr=s=)10H5(0s)=ωω2s1,(3=s=0+±17000K.7)r(s+50)
s1
A(s)B'(系s)统=A根'(轨s)迹B(s)
s3 p3
p2
p1
-4
-2
0
((24))ζ阻=尼03.振5s2荡+1响2应s+s的81==K-r0值0.7范+围j1.2
s=s-s10=3=.-80-56.8+50K.7r×=20=s.82-=54×-.631..1155×3.15=3.1
-2.8
450
1080
360
0σ
0σ
第四章习题课 (4-2)
4-2 已知开环传递函数,试用解析法绘制出系
统的根轨迹,并判断点(-2+j0),(0+j1),
《自动控制原理》习题及解答04

Re(D( j )) K 8 2 0
Im(D(
j ))
20
3
0
60
0
解得:
K
0
⑤起始角:由相角条件 根轨迹如图解 4-5(a)所示。
2 5
K
160
p2 63 , p3 63 。
⑵ G(s)H (s)
G(s1)H(s1)
K*
1
1 j 3 1 1 j 3 2 1 j 3 4
解出 : K * =12 ,K= K * 3 82
4-2 已知开环零、极点如图 4-2 所示,试绘制相应的根轨迹。
(a)
(b)
(c)
(d)
56
(e)
(f)
(g)
题 4-2 图 开环零、极点分布图
确定根轨迹的渐近线、分离点、与虚轴交点和起始角)。
解(1)闭环特征方程
D(s) s 2 (s 10)(s 20) K (s z) s 4 30s3 200s 2 K s K z 0
有
D( j ) ( 4 200 2 K z) j(K 30 3 ) =0
第四章习题及答案
4-1 系统的开环传递函数为
G(s)H (s)
K*
(s 1)(s 2)(s 4)
试证明点 s1 1 j 3 在根轨迹上,并求出相应 的根轨迹增益 K * 和开环增益 K 。
解 若点 s1 在根轨迹上,则点 s1 应满足相角条 件 G(s)H (s) (2k 1) ,如图解 4-1 所示。
63
Re( j ) K 10.5 4 79.5 2 0 Im( j ) 5 43.5 3 45.5 0
自动控制原理第4章 习题及解析
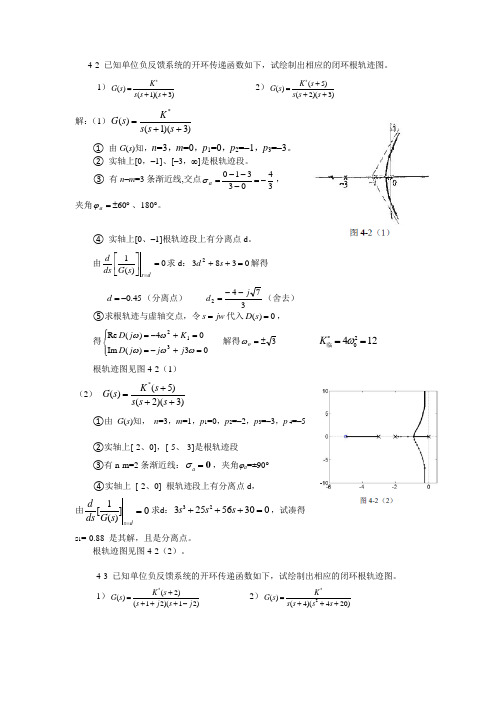
4-2 已知单位负反馈系统的开环传递函数如下,试绘制出相应的闭环根轨迹图。
1)*()(1)(3)K G s s s s =++ 2)*(5)()(2)(3)K s G s s s s +=++解:(1)()(1)(3)*K G s s s s =++① 由G (s )知,n =3,m =0,p 1=0,p 2=–1,p 3=–3。
② 实轴上[0,–1]、[–3,∞]是根轨迹段。
③ 有n –m =3条渐近线,交点3403310-=---=a σ, 夹角︒±=60a ϕ、180°。
④ 实轴上[0、–1]根轨迹段上有分离点d 。
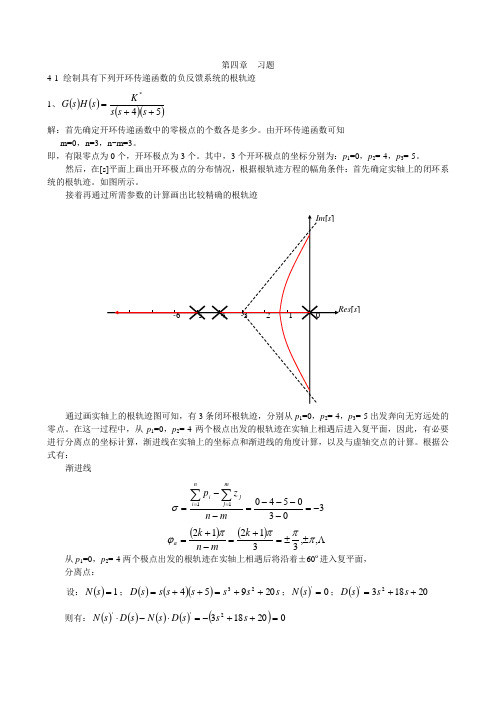
由0)(1=⎥⎦⎤⎢⎣⎡=ds s G ds d 求d :03832=++s d 解得 45.0-=d (分离点) 3742j d --=(舍去) ⑤求根轨迹与虚轴交点,令jw s =代入0)(=s D ,得⎪⎩⎪⎨⎧=+-==+-=03)(Im 04)(Re 312ωωωωωj j j D K j D 解得3±=o ω 20412*K ω==临根轨迹图见图4-2(1)(2) *(5)()(2)(3)K s G s s s s +=++①由 G (s )知, n =3,m =1,p 1=0,p 2=–2,p 3=–3,p 4=–5②实轴上[-2、0],[-5、-3]是根轨迹段 ③有n-m=2条渐近线:0a σ=,夹角ϕa =±90°④实轴上 [-2、0] 根轨迹段上有分离点d , 由1[]0()s dd ds G s ==求d :3232556300s s s +++=,试凑得 s 1=-0.88 是其解,且是分离点。
根轨迹图见图4-2(2)。
4-3 已知单位负反馈系统的开环传递函数如下,试绘制出相应的闭环根轨迹图。
1)*(2)()(12)(12)K s G s s j s j +=+++- 2)*2()(4)(420)K G s s s s s =+++解:(1)*(2)()(12)(12)K s G s s j s j +=+++-根轨迹图见图4-3(1)(2)*2()(4)(420)K G s s s s s =+++① n =4,m =0,p 1=0,p 2=–4,p 3、4=–2±j 4② p 1、p 2连线中点正好是p 3、p 4实部,开环极点分布对称于垂线s=–2,根轨迹也将对称于该垂线。
自动控制原理试-4

自动控制原理试-4(总分:100.00,做题时间:90分钟)一、(总题数:29,分数:100.00)1.已知某系统结构图如图所示,试根据频率特性物理意义,求当信号输入为r(t)=2sin(t+30°)+cos(2t-45°)时,系统的稳态输出c ss和稳态误差e ss。
(分数:2.00)__________________________________________________________________________________________ 正确答案:()解析:闭环传递函数;频率特性;;误差传递函数;误差频率特性;;当r 1(t)=2sin(t+30°)时,当r 2 (t)=cos(2t-45°)时,因此在输入作用下,2.最小相位系统对数幅频渐近特性如图所示,请确定系统的传递函数。
(分数:2.00)__________________________________________________________________________________________ 正确答案:()解析:由图知在低频段渐近线斜率为0,因为最小交接频率前的低频段L(ω)=-v20lgω,故v=0。
渐近特性为分段线性函数,在各交接频率处,渐近特性斜率发生变化。
在ω=0.1处斜率变化20dB/dec,属一阶微分环节。
在ω=ω1处斜率变化-20dB/dec,属惯性环节。
在ω=ω2处斜率变化-20dB/dec,属惯性环节。
在ω=ω3处斜率变化-20dB/dec,属惯性环节。
在ω=ω4处斜率变化-20dB/dec,属惯性环节。
因此,系统的传递函数具有下述形式式中,K,ω1,ω2,ω3,ω4待定。
由201gK=30得K=10 1.5≈31.62。
因渐近线直线段,若设某段的斜率为k,(ωA,L(ωA )),(ωB,L(ωB ))为该线段上的两点,则由直线方程:确定所以确定,所以确定,所以确定,所以于是,所求的传递函数为单位反馈控制系统的开环传递函数为:(分数:4.00)(1).求系统的幅值裕量为20dB时的K值。
自动控制原理第4章课后习题答案

第4章4-1 已知系统的开环传函如下,试绘制系统参数K 从0→∞时系统的根轨迹图,对特殊点要加以简单说明. (1) ()()(4)(1)(2)K s G s H s s s s +=++ (2) ()()2(4)(420)KG s H s s s s s =+++ 解:(1)有3个开环几点,1个开环零点,固有3条根轨迹分别始于0,-1,-2; 1条根轨迹终于-4,另外2条根轨迹趋于无穷远处 实轴上的根轨迹分布在-1~0之间及-4~-2之间 渐近线条数为n-m=3-1=2 渐进线的交点12041312σ++-=-=-渐近线的倾角90θ︒=±分离点22[()()]02152480d G s H s s s s ds =⇒+++= 解得: 12s =- 其它舍去求与虚轴交点:令s j ω=代入特征方程(1)(2)(4)0s s s K s ++++=中得(1)(2)(4)0j j j K j ωωωω++++= 令上式两边实部和虚部分别相等,有226430(2)0 2.83K K K ωωωω⎧=⎧-=⎪⎪⇒⎨⎨+-==±=±⎪⎪⎩⎩绘制系统根轨迹,如图4-1(1)(2)有4个开环几点,无开环零点,有4条根轨迹,分别起始于0,-4, 24j -±终于无穷远处 实轴上的根轨迹分布在-4~0之间; 渐近线条数为n-m=4-0=4 渐进线的交点04242424j j σ++++-=-=-渐近线的倾角45,135θ︒︒=±±分离点22[()()]042472800d G s H s s s s ds=⇒+++=解得: 2s =-由()()1G s H s =得21224(2)4220K=--+--⨯+, K=64绘制系统根轨迹,如图4-1(2)图4-1(1)图4-1(2)4-2 已知系统的开环传函为(2)(3)()()(1)K s s G s H s s s ++=+(1) 试绘制系统参数K 从0→∞时系统的根轨迹图,求取分离点和会和点 (2) 试证明系统的轨迹为圆的一部分解:有2个开环极点,2个开环零点,有2条根轨迹,分别起始于0,-1; 终于-2,-3;实轴上的根轨迹分布在-3~-2之间及-1~0之间分离会和点2221,2,321[()()]02401,12123(2)()()()[()()]0[2(6)4]0203602,18()()[()()]00020,d G s H s s ds KK K s G s H s s s a d G s H s s s a s a dsa a a a s KG s H s sd G s H s s ds a s s =⇒+===-+⨯-++=+=⇒+++=⇒-+≥⇒≤≥===⇒=≤≤=23s ==解得:当10.634s =-时 由()()1G s H s =得(0.6342)(0.6343)10.070.6340.6341K K -+-+=⇒=-⨯-+当2 2.366s =-时 同理 K=13.9 绘制系统根轨迹 如图4-2证明:如果用s j αβ=+代入特征方程1()()0G s H s +=中,并经整理可得到以下方程式:2233()24αβ++=(注:实部虚部相等后消K 可得)显然,这是个圆的方程式,其圆心坐标为3(,0)2-,半径为2图4-24-3 已知系统的开环传函()()(1)(3)KG s H s s s =++(1) 试绘制系统参数K 从0→∞时系统的根轨迹图(2) 为了使系统的阶跃响应呈现衰减振荡形式,试确定K 的范围 解:有2个开环极点,无开环零点,有2条根轨迹,分别起始于-1,-3; 终于无穷远处;实轴上的根轨迹分布-3~-1之间; 渐近线条数2; 渐近线的交点13022σ+-=-=- 渐近线的倾角90θ︒=± 分离会和点[()()]0240d G s H s s ds=⇒+=解:S=-2由()()1G s H s =得1,12123KK ==-+⨯-+绘制系统根轨迹图4-3由图知 当1<K<+∞时系统的响应呈现衰减振荡形式4-4 设负反馈控制系统的开环传函为2(2)()()()K s G s H s s s a +=+试分别确定使系统根轨迹有一个,两个和三个实数分离点的a 值,分别画出图形 解:求分离点2[()()]0[2(6)4]0d G s H s s s a s a ds=⇒+++=解得s=0,或分离点为实数2203602a a a ⇒-+≥⇒≤或18a ≥当a=18时 实数分离点只有s=0 如图4-4(1)当a>18时 实数分离点有三个,分别为1,2,3(6)0,4a s -+=如图4-4(2)当a=2时2()()K G s H s s =分离点[()()]00d G s H s s ds=⇒= 即分离点只有一个s=0 如图4-4(3) 当02a ≤≤分离点有一个s=0 如图4-4(4) 当a<0时 分离点有1230,s s s ===(舍去)如图4-4(5)综上所述:当a=18,0≤a ≤2时,系统有一个分离点 当a >18时,系统有三个实数分离点 当a <0时,系统有两个分离点a=18图4-4(1) a=2图4-4(2)图4-4(3) a=1图4-4(4)图4-4(5)4-65 已知系统的开环传递函数为3(1)(3)()()K S S G S H S S++=(1)绘制系统的根轨迹。
自动控制原理第4章习题解——邵世凡
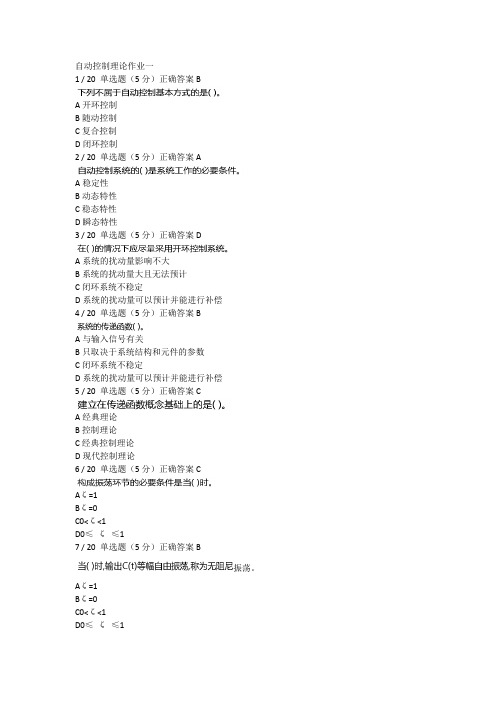
第四章 习题4-1 绘制具有下列开环传递函数的负反馈系统的根轨迹1、()()()()54*++=s s s K s H s G解:首先确定开环传递函数中的零极点的个数各是多少。
由开环传递函数可知 m=0,n=3,n -m=3。
即,有限零点为0个,开环极点为3个。
其中,3个开环极点的坐标分别为:p 1=0,p 2=-4,p 3=-5。
然后,在[s]平面上画出开环极点的分布情况,根据根轨迹方程的幅角条件:首先确定实轴上的闭环系统的根轨迹。
如图所示。
接着再通过所需参数的计算画出比较精确的根轨迹通过画实轴上的根轨迹图可知,有3条闭环根轨迹,分别从p 1=0,p 2=-4,p 3=-5出发奔向无穷远处的零点。
在这一过程中,从p 1=0,p 2=-4两个极点出发的根轨迹在实轴上相遇后进入复平面,因此,有必要进行分离点的坐标计算,渐进线在实轴上的坐标点和渐进线的角度计算,以及与虚轴交点的计算。
根据公式有:渐进线303054011-=----=--=∑∑==mn zp n i mj jiσ()() ,,331212ππππϕ±±=+=-+=k mn k a从p 1=0,p 2=-4两个极点出发的根轨迹在实轴上相遇后将沿着±60º进入复平面,分离点:设:()1=s N ;()()()s s s s s s s D 2095423++=++=;()0'=s N ;()201832'++=s s s D则有:()()()()()0201832''=++-=⋅-⋅s s s D s N s D s N[s ]0201832=++s s解得方程的根为s 1= -4.5275(不合题意舍去);s 2= -1.4725 得分离点坐标:d = -1.4725。
与虚轴的交点:在交点处,s=j ω,同时也是闭环系统的特征根,必然符合闭环特征方程,于是有:()020********=++--=+++*=*K j j K s s sj s ωωωω整理得: 0203=-ωω;092=-*ωK 解得01=ω;203,2±=ω;18092==*ωK 最后,根据以上数据精确地画出根轨迹。
西安石油大学函授《自动控制理论》作业1-5全
自动控制理论作业一1 / 20 单选题(5分)正确答案 BA开环控制B随动控制C复合控制D闭环控制2 / 20 单选题(5分)正确答案 AA稳定性B动态特性C稳态特性D瞬态特性3 / 20 单选题(5分)正确答案 DA系统的扰动量影响不大B系统的扰动量大且无法预计C闭环系统不稳定D系统的扰动量可以预计并能进行补偿4 / 20 单选题(5分)正确答案 BA与输入信号有关B只取决于系统结构和元件的参数C闭环系统不稳定D系统的扰动量可以预计并能进行补偿5 / 20 单选题(5分)正确答案 CA经典理论B控制理论C经典控制理论D现代控制理论6 / 20 单选题(5分)正确答案 CAζ=1Bζ=0C0<ζ<1D0≤ζ≤17 / 20 单选题(5分)正确答案 B振荡。
Aζ=1Bζ=0C0<ζ<1D0≤ζ≤18 / 20 单选题(5分)正确答案 D极点位于位于( )。
A虚轴正半轴B实正半轴C虚轴负半轴D实轴负半轴9 / 20 单选题(5分)正确答案 B有根都具有( )。
A实部为正B实部为负C虚部为正D虚部为负10 / 20 单选题(5分)正确答案 BA越大系统的动态特性越好B越大系统的稳态特性越好C越大系统的阻尼越小D越小系统的稳态特性越好11 / 20 单选题(5分)正确答案 D根轨迹是指开环系统某个参数由0变化到∞,( )在s平面上移动的轨迹。
A开环零点B开环极点C闭环零点D闭环极点12 / 20 单选题(5分)正确答案 A,则共轭出现。
所以根轨迹( )。
A对称于实轴B对称于虚轴C位于左半[s]平面D位于右半[s]平面13 / 20 单选题(5分)正确答案 C系统的开环传递函数,则全根轨迹的分支数是( )。
A1B2C3D414 / 20 单选题(5分)正确答案 A已知控制系统的闭环传递函数是,则其根轨迹起始于( )。
AG(s)H(s)的极点BG(s)H(s)的零点C1+G(s)H(s)的极点D1+G(s)H(s)的零点15 / 20 单选题(5分)正确答案 B系统的闭环传递函数是,根轨迹终止于( )。
自动控制原理作业题(后附答案)
自动控制原理作业题(后附答案)-标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII自动控制原理作业题第一章基本概念一、简答题1 简述自动控制的基本概念2 简述自动控制系统的基本组成3 简述控制系统的基本控制过程4 简述自动控制系统的基本分类5 试比较开环控制和闭环控制的特点6 简述自动控制系统的性能评价指标二、分析计算题1 液位自动控制系统如图所示。
试分析该系统工作原理,画出系统原理框图,指出被控对象、被控参量和控制量2 发动机电压调节系统如图所示,试分析其工作原理,画出系统原理框图,指出其特点。
3液面控制系统如图所示。
试分析该系统的工作原理,指出系统中的干扰量、被控制量及被控制对象,并画出系统的方框图。
4控制系统如图所示。
简述该系统的工作原理,说明该系统的给定值、被控制量和干扰量,并画出该系统的方块图。
图1-7发电机-电动机调速系统操纵电位计发电机伺服电机减速器负载Θr给定值Ur 前置放大器功放执行元件被控量Wm这是一个开环控制的例子+E-EUr操纵电位计R1R2R3R4放大器直流发电机伺服电机Wd Wm发电机-电动机调速系统减速器负载5火炮随动控制系统如图所示。
简述该系统的工作原理,并画出该系统的原理框图。
第二章 线性控制系统的数学模型一、简答题1 简述建立控制系统数学模型的方法及其数学表示形式2 简述建立微分方程的步骤3 简述传递函数的基本概念及其特点4 给出组成控制系统典型基本环节二、分析计算题1 有源电网络如图所示,输入量为)(1t u ,输出量为)(2t u ,试确定该电网络的传递函数2 电枢控制式直流电动机原理图如图所示,输入量为)(1t e ,输出量为)(t o θ,试确定其微分方程。
图中,电动机电枢输入电压;电动机输出转角;电枢绕组的电阻;电枢绕组的电感;流过电枢绕组的电流;电动机感应电势;电动机转矩;电动机及负载这和到电动机轴上的转动惯量;电动机及负载这和到电动机轴上的粘性摩擦系数。
自动控制原理_王万良(课后答案4
⎡0 1 0 ⎤ ⎢ ⎥ x ( k + 1) = ⎢ 0 0 1 ⎥ x ( k ) ⎢0 k 0 ⎥ ⎣ 2 ⎦
试求使系统渐进稳定的 K 值范围。 *答案: 0 < K < 2 时系统渐进稳定。
K>0
4.13 非线性系统线性部分的极坐标图,非线性部分的负倒幅特性如图题 4.13 所示。试判断系统是否稳 定,是否存在自激振荡。 图题 4.13 I
4.7 已知闭环离散系统的特征方程为 D(z) = z + 0.2z + z + 0.36z + 0.8 = 0 试判断系统的稳定性。 答案:临界稳定 4.8 如图题 4.8 所示离散系统,采样周期 T=1s,Gh(s)为零阶保持器,而
4 3 2
G (s) =
Κ s ( 0 . 2 s + 1)
要求: (1)K=5 时,分析系统的稳定性; (2)确定使系统稳定的 K 值范围。
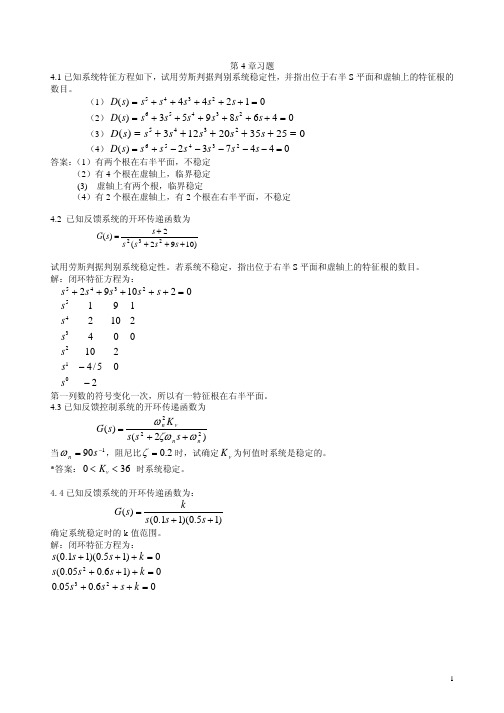
第 4 章习题 4.1 已知系统特征方程如下,试用劳斯判据判别系统稳定性,并指出位于右半 S 平面和虚轴上的特征根的 数目。 (1) D( s) = s + s + 4 s + 4 s + 2 s + 1 = 0
5 4 3 2
(2) D( s) = s + 3s + 5s + 9 s + 8s + 6s + 4 = 0
闭环特征方程为:
s ( s − 1) + 10(1 + k n s ) = 0
即 s + (10k n s − 1) s + 10 = 0
2
s2 1 10 1 s 10k n − 1 s0 10 10 k n − 1 > 0, k n > 0.1 稳定 当 k n = 0.1 时,临界稳定 非最小相位系统,当速度及增量 k n 越大,越稳定
自动控制原理 4-5章习题与解答习题课后校对稿
可知: K 增大时, % , t p 。
4
4-9 设电子心率起搏器系统如图 4-41 所示,其中模仿心脏的传递函数相当于一个纯积 分器。要求:
(1)若 0.5 对应于最佳响应情况,问该情况下起搏器的增益 K 应为多大?
(2)若期望心速为 60 次/min,并突然接通起搏器,问 1 s 后实际心速为多少?瞬时最大 心率为多大?
10(s 2) , s2 (s 20)
以及 R(s) 1 s
2 s2
则 T (s) Y (s) 10 。 R(s) s 20
4-5 某控制系统结构图如图 4-38 所示,其中 K1 5 , T1 0.5 。 (1)求系统的单位阶跃响应; (2)计算系统的性能指标 tr , t p , ts ( 5% ), % ;
T1 5T1
(1)该系统的单位阶跃响应为
y(t) 2.51
e nt 1 2
sin(d t
)
2.51
23 3
e nt
sin(
3t
)
3
2.51
1.1547e t
sin(1.7321t
3
)
(2)系统的性能指标为:
解之得: K 25 , n 25
(2)闭环传递函数写为: T (s)
s2
625 25s 625
,闭环极点 s1,2
12.5
j12.5
3。
方法一:系统的阶跃响应为
y(t) 1
1 1
2
e nt
sin( n
自动控制原理第四、五章答案

四 根轨迹分析法2-4-1 【解】:题2-4-1解图2-4-2 设负反馈系统的开环传递函数分别如下: (1))1)(5.0)(2.0()(+++=s s s Ks G (2))12()1()(++=s s s K s G(3))52()2()(2+++=s s s K s G (4))136)(5)(1()(2++++=s s s s Ks G试绘制K 由+∞→0变化的闭环根轨迹图。
【解】:(1)系统有三个开环极点 1,5.0,2.0321-=--=--=-p p p 。
① 0,3==m n ,有三条根轨迹,均趋于无穷远。
② 实轴上的根轨迹在区间]][2.0,5.01,(----∞。
③ 渐近线 ()()2,1,0180,6031801257.0315.02.0=︒︒±=︒⋅+=-=---=-k k θσ ④ 分离点。
方法一 由0)()()()(='-'s Q s P s Q s P 得33.0,8.008.04.332,12--=⇒=++s s s8.01-=s 不在根轨迹上,舍去。
分离点为33.0-。
分离点处K 值为 014.0)()(33.0=-=-=s s P s Q K方法二 特征方程为:01.08.07.123=++++K s s s重合点处特征方程:0)2()2()()(22232=+++++=++b a s a ab s b a s b s a s 令各项系数对应相等求出重合点坐标和重合点处增益取值。
题2-4-2(1)解图⑤ 根轨迹与虚轴的交点。
系统的特征方程为01.08.07.1)(23=++++=K s s s s D方法一 令ωj s +,得⎪⎩⎪⎨⎧=±=⇒⎪⎩⎪⎨⎧=++-=+-⇒=+++--26.18.001.07.108.001.08.07.12323K K K j j ωωωωωωω 方法二 将特征方程列劳斯表为Ks K s Ks s ++-+1.07.11.08.01.07.18.010123令1s 行等于0,得26.1=K 。
自动控制原理(4)
4.1 根轨迹的基本概念
根据如下控制系统框图介绍根轨迹的基本概念。
R(s)
+ -
K
C(s)
s(0.5s 1)
图4-1 控制系统框图
1.将图4-1所示系统的开环传递函数转化为:
G(s) K k ; k 2K s(0.5s 1) s(s 2)
上式便是绘制根轨迹所用的开环传递函数的标准 形式——零极点增益形式。
或
G(s)H (s)
K1 sm
m
zj
j 1
s m1
m j 1
zj
sn
n i1
pi
s n1
n i1
pi
上式可化为:
G(s)H(s)
K1
snm
τzj、τpi ——分之和分母中的时间常数。
由上两式不难看出
m
(z j )
K K1
j 1 n
( pi )
i1
zj
1
zj
,
( j 1, 2 , , m)
;
pi
1
pi
,
(i 1 , 2 , , n)
由此可以得到另一种形式的幅值条件和相角条件:
m
s zj
n i1
pi
m j 1
zj
s nm1
在n>m的条件下,当K1→∞时,有(n-m)条根轨
迹分支趋向于无穷远,即s→∞。这时可以只考虑高次项,
将上式近似写为:
G(s)H(s)
胡寿松自动控制原理习题解答第四章
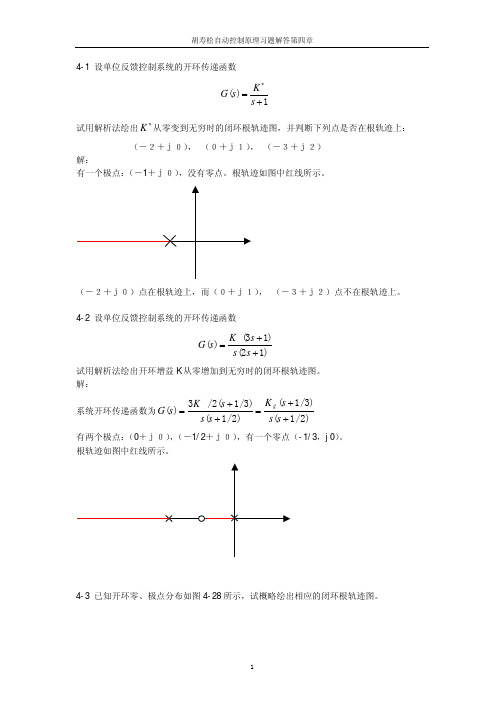
4-1 设单位反馈控制系统的开环传递函数 1)(+=∗s K s G试用解析法绘出∗K 从零变到无穷时的闭环根轨迹图,并判断下列点是否在根轨迹上: (-2+j0), (0+j1), (-3+j2) 解:有一个极点:(-1+j0),没有零点。
根轨迹如图中红线所示。
(-2+j0)点在根轨迹上,而(0+j1), (-3+j2)点不在根轨迹上。
4-2 设单位反馈控制系统的开环传递函数 )12()13()(++=s s s K s G 试用解析法绘出开环增益K 从零增加到无穷时的闭环根轨迹图。
解:系统开环传递函数为)2/1()3/1()2/1()3/1(2/3)(++=++=s s s K s s s K s g G 有两个极点:(0+j0),(-1/2+j0),有一个零点(-1/3,j0)。
根轨迹如图中红线所示。
4-3 已知开环零、极点分布如图4-28所示,试概略绘出相应的闭环根轨迹图。
图4-28 开环零、极点分布图4-4 设单位反馈控制系统开环传递函数如下,试概略绘出相应的闭环根轨迹图(要求确定分离点坐标d): (1) )15.0)(12.0()(++=s s s Ks G解:系统开环传递函数为)2)(5()2)(5(10)(++=++=s s s K s s s Ks g G 有三个极点:(0+j0),(-2+j0),(-5+j0)没有零点。
分离点坐标计算如下:051211=++++d d d 3解方程的010142=++d d 7863.31−=d ,d 88.02−=取分离点为88.0−=d根轨迹如图中红线所示。
(2) )12()1()(++=s s s K s G解:系统开环传递函数为)5.0()1()5.0()1(2/)(++=++=s s s K s s s K s g G有两个极点:(0+j0),(-0.5+j0),有一个零点(-1+j0)。
分离点坐标计算如下:115.011+=++d d d 解方程的05.022=++d d 7.11−=d ,d 29.02−=取分离点为7.11−=d ,29.02−=d 根轨迹如图中红线所示。
自动控制原理 孟华 第4章习题解答

4-1如果单位反馈控制系统的开环传递函数1)(+=s K s G 试用解析法绘出K 从零向无穷大变化时的闭环根轨迹图,并判断下列点是否在根轨迹上: (-2,j 0),(0+j 1),( -3+j 2)。
解:根轨迹如习题4-1答案图所示。
(-2,+j 0)在根轨迹上;(0,+j 1), (-3, +j 2) 不在根轨迹上。
习题4-1答案图4-2设单位反馈控制系统的开环传递函数。
)12()13()(++=s s s K s G试用解析法给出开环增益K 从零增加到无穷时的闭环根轨迹图。
解: 解析法:K =0时:s =-1/2,0;K =1:s =-12;K =-∞:s =-∞,-1/3。
根轨迹如习题4-2答案图所示。
习题4-2答案图4-3 已知系统的开环传递函数)1()1()()(-+=s s s K s H s G ,试按根轨迹规则画出该系统的根轨迹图,并确定使系统处于稳定时的K 值范围。
解:分离点:0.414;会合点:-2.414 ;与虚轴交点:±j 。
稳定的K 值范围:K >1。
根轨迹如习题4-3答案图所示。
习题4-3答案图4-4已知一单位反馈系统的开环传递函数为2*)4)(1)(1()(+-+=s s s K s G (1)试粗略画出K *由0到∞的根轨迹图;(2)分析该系统的稳定性。
解:稳定性分析:系统不稳定。
根轨迹如习题4-4答案图所示。
Root LocusReal AxisI m a g i n a r y A x i s习题4-4答案图4-5 设控制系统的开环传递函数为)164)(1()1()()(2*++-+=s s s s s K s H s G ,试绘制系统根轨迹图,并确定使系统稳定的开环增益范围。
解:渐近线:θ =±60°,180°;σ =-2/3;复数极点出射角 55°;分离会合点0.46和-2.22;与虚轴交点1.57和2.56;使系统稳定的开环增益为1.46 <K <2.23 (即23.4 <K *<35.7)。
自动控制原理作业题 (后附答案)

自动控制原理作业题第一章基本概念一、简答题1 简述自动控制的基本概念2 简述自动控制系统的基本组成3 简述控制系统的基本控制过程4 简述自动控制系统的基本分类5 试比较开环控制和闭环控制的特点6 简述自动控制系统的性能评价指标二、分析计算题1 液位自动控制系统如图所示。
试分析该系统工作原理,画出系统原理框图,指出被控对象、被控参量和控制量2 发动机电压调节系统如图所示,试分析其工作原理,画出系统原理框图,指出其特点。
3液面控制系统如图所示。
试分析该系统的工作原理,指出系统中的干扰量、被控制量及被控制对象,并画出系统的方框图。
4控制系统如图所示。
简述该系统的工作原理,说明该系统的给定值、被控制量和干扰量,并画出该系统的方块图。
图1-7发电机-电动机调速系统操纵电位计发电机伺服电机减速器负载Θr给定值Ur 前置放大器功放执行元件被控量Wm这是一个开环控制的例子+E-EΘrUr操纵电位计R1R2R3R4放大器直流发电机伺服电机Wd Wm发电机-电动机调速系统减速器负载5火炮随动控制系统如图所示。
简述该系统的工作原理,并画出该系统的原理框图。
第二章 线性控制系统的数学模型一、简答题1 简述建立控制系统数学模型的方法及其数学表示形式2 简述建立微分方程的步骤3 简述传递函数的基本概念及其特点4 给出组成控制系统典型基本环节二、分析计算题1 有源电网络如图所示,输入量为)(1t u ,输出量为)(2t u ,试确定该电网络的传递函数2 电枢控制式直流电动机原理图如图所示,输入量为)(1t e ,输出量为)(t o ,试确定其微分方程。
图中,电动机电枢输入电压;电动机输出转角;电枢绕组的电阻;电枢绕组的电感;流过电枢绕组的电流;电动机感应电势;电动机转矩;电动机及负载这和到电动机轴上的转动惯量;电动机及负载这和到电动机轴上的粘性摩擦系数。
3 某RC 电路网络原理图如图所示,电压()i u t 为输入量,()o u t 为输出量,试画出其方块图,并求其传递函数。
自动控制原理作业4
自动控制原理作业4 Due: 3pm, 2014/3/13
1、已知某系统的开环传递函数为
试绘制系统开环对数幅频特性和开环对数相频特性图,用对数判据分析闭环稳定性,并求出相位裕量和增益裕量。
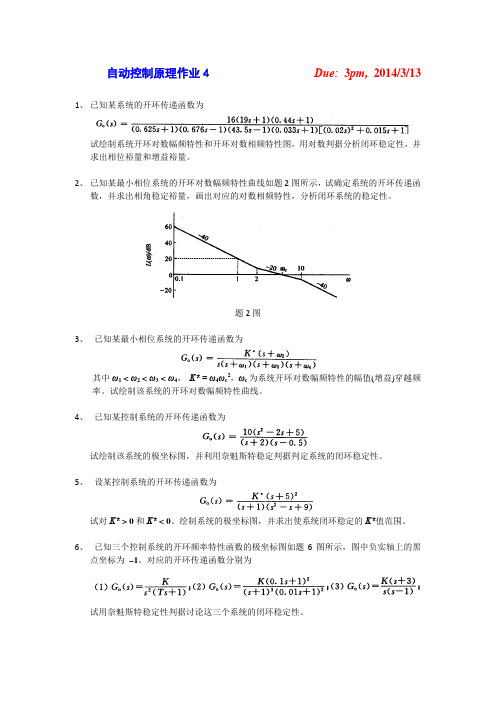
2、已知某最小相位系统的开环对数幅频特性曲线如题2图所示,试确定系统的开环传递函
数,并求出相角稳定裕量,画出对应的对数相频特性,分析闭环系统的稳定性。
题2图
3、 已知某最小相位系统的开环传递函数为
其中ω1 < ω2 < ω3 < ω4, K* = ω4ωc2,ωc为系统开环对数幅频特性的幅值(增益)穿越频率。
试绘制该系统的开环对数幅频特性曲线。
4、 已知某控制系统的开环传递函数为
试绘制该系统的极坐标图,并利用奈魁斯特稳定判据判定系统的闭环稳定性。
5、 设某控制系统的开环传递函数为
试对K* > 0和K* < 0。
绘制系统的极坐标图,并求出使系统闭环稳定的K*值范围。
6、 已知三个控制系统的开环频率特性函数的极坐标图如题6图所示,图中负实轴上的黑
点坐标为 –1。
对应的开环传递函数分别为
试用奈魁斯特稳定性判据讨论这三个系统的闭环稳定性。
题6图
7、 设某反馈控制系统开环频率特性函数的极坐标图如题7图所示,开环放大倍数为K =
500,右半s平面无开环传递函数的极点和零点。
试确定使系统闭环稳定的K值范围。
题7图
8、 设某单位反馈控制系统的开环传递函数为
试绘制该系统的极坐标图,并确定使相角裕量等于45o时的τ值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动控制原理作业4 Due: 3pm, 2014/3/13
1、已知某系统的开环传递函数为
试绘制系统开环对数幅频特性和开环对数相频特性图,用对数判据分析闭环稳定性,并求出相位裕量和增益裕量。
2、已知某最小相位系统的开环对数幅频特性曲线如题2图所示,试确定系统的开环传递函
数,并求出相角稳定裕量,画出对应的对数相频特性,分析闭环系统的稳定性。
题2图
3、 已知某最小相位系统的开环传递函数为
其中ω1 < ω2 < ω3 < ω4, K* = ω4ωc2,ωc为系统开环对数幅频特性的幅值(增益)穿越频率。
试绘制该系统的开环对数幅频特性曲线。
4、 已知某控制系统的开环传递函数为
试绘制该系统的极坐标图,并利用奈魁斯特稳定判据判定系统的闭环稳定性。
5、 设某控制系统的开环传递函数为
试对K* > 0和K* < 0。
绘制系统的极坐标图,并求出使系统闭环稳定的K*值范围。
6、 已知三个控制系统的开环频率特性函数的极坐标图如题6图所示,图中负实轴上的黑
点坐标为 –1。
对应的开环传递函数分别为
试用奈魁斯特稳定性判据讨论这三个系统的闭环稳定性。
题6图
7、 设某反馈控制系统开环频率特性函数的极坐标图如题7图所示,开环放大倍数为K =
500,右半s平面无开环传递函数的极点和零点。
试确定使系统闭环稳定的K值范围。
题7图
8、 设某单位反馈控制系统的开环传递函数为
试绘制该系统的极坐标图,并确定使相角裕量等于45o时的τ值。