7最小二乘定位算解析
最小二乘法计算节点位置

最小二乘法计算节点位置
最小二乘法是一种数学优化技术,它通过最小化误差的平方和来找到最佳函数匹配。
在计算节点位置方面,最小二乘法定位算法通过将误差的平方和最小化来求得待定位节点位置的最佳估计值。
具体来说,最小二乘法定位算法的基本原理是:已知n个信标节点的坐标,信标节点向待定位节点发送数据包,待定位节点测量来自信标节点数据包的信号强度。
根据信号传播模型,可以将这一系列的信号强度值(RSSI值)转换为相应的距离。
然后,联立待定位节点坐标(x,y)、信标节点坐标(xi,yi)、两者之间的距离di,可以建立以下方程组:
1. 第一个方程减去第二个方程
2. 第二个方程减去第三个方程
...
n-1. 第n-1个方程减去第n个方程
通过这种方式,可以消去方程组中的未知参数x2+y2,得到以下方程组:
Ax=b
其中,A是一个矩阵,x是待定位节点的坐标(x,y),b是一个向量。
由于在
n个方程中,待定位节点坐标X不会符合方程组AX=B中的所有方程,因此设置误差向量为ε=AX−B,取误差向量中误差的平方和,则有E=εTε。
若要误差最小,即使得E最小。
从而将上式对X求导,令导数为0,其表达式为:
解方程(8)可以得到:
X=(ATA)−1ATb
由于X是关于待定位节点坐标的矩阵形式,因此可以获得待定位节点的估计坐标。
需要注意的是,如果待定位节点以及信标节点的坐标都是三维形式(x,y,z)、(xi,yi,zi),则需要将上述方程组稍加修改,改为关于x,y,z的矩阵形式即可。
基于最小二乘方法的单机测向定位算法

基于最小二乘方法的单机测向定位算法何青益;赵地【摘要】针对传统单机测向定位算法定位精度低的问题,提出了一种基于最小二乘方法的单机测向定位算法,讨论了单机测向交叉定位中的若干问题,包括测向定位原理和单机测向交叉定位的情况.首先介绍了两站直接测向交叉定位的原理,然后推导了基于最小二乘方法的测向交叉定位算法,并通过计算机仿真验证了定位性能,与直接测向交叉定位算法相比,基于最小二乘方法的测向交叉定位算法提高了定位精度和算法稳定性,具有很大的实用性.【期刊名称】《舰船电子对抗》【年(卷),期】2013(036)001【总页数】4页(P37-39,61)【关键词】测向定位;交叉定位;最小二乘【作者】何青益;赵地【作者单位】中国电子科技集团公司54所,石家庄050081【正文语种】中文【中图分类】TN9110 引言测向定位是利用对同一目标的示向线进行交叉定位来确定目标的位置。
机载测向定位分为多机测向交叉定位和单机测向交叉定位,其中单机测向交叉定位由于具有设备简单和系统相对独立等优点,得到了广泛研究。
利用单机在不同时刻测量的多条示向线直接交叉定位算法简单,但是定位结果不是最优[1];基于扩展卡尔曼滤波(EKF)及其推广的定位算法在滤波初始值估计不准或者测量值有突变时容易发散,性能不稳定[2];本文引入的基于最小二乘方法的测向交叉定位算法,结合了直接交叉定位算法和非线性最小二乘算法,直接交叉定位获取目标的估计初值,通过最小二乘方法迭代得到更高精度的定位结果。
基于最小二乘方法的测向交叉定位算法定位精度高,对测向数据进行预处理,可以实时更新目标的位置信息,是一种稳定性好、定位精度高的定位算法。
1 测向交叉定位原理两站交叉定位是一种基本的交叉定位方式。
如图1所示,两测向站的大地经纬度坐标分别为A1(x1,y1)、A2(x2,y2),辐射源到两测向站 A1、A2的来波方位角分别为θ1、θ2,则辐射源所处的地理位置即是2条示向线的交叉点B,设其坐标记为(xm,ym)。
最小二乘法定位

最小二乘法定位
最小二乘法定位是一种基于信号强度的定位技术,其原理是通过计算
接收到的信号强度与参考点的距离之间的关系,来确定接收设备的位置。
最小二乘法定位常用于室内定位和仓库管理等领域,并已成为一
种广泛接受的定位技术。
最小二乘法定位的优点是精度高、可靠性好、成本低等。
应用最小二
乘法定位技术的设备通常包括传感器、Wi-Fi模块、蓝牙模块等,这些设备可以通过计算信号强度和WiFi以及蓝牙等其它附加参数来确定设备的位置。
通常情况下,最小二乘法定位的精度在1到10米之间,对于绝大部分室内定位来说,其精度已经足够了。
最小二乘法定位的局限在于需要一定的信号数据以及算法技术支持,
并且受到环境干扰的影响较大。
因此,在应用最小二乘法定位技术时,需要了解所处环境的变化,以及如何通过调整算法来应对这些变化。
总之,最小二乘法定位技术是一种应用非常广泛的室内定位技术,其
精度较高,成本较低,应用范围广泛,而且具有很好的可靠性和实用
性。
鉴于其不断优化和发展,我们相信最小二乘法定位技术将会在未来更加普及和应用。
最小二乘法知识
最小二乘法知识最小二乘法是一种最优化方法,经常用于拟合数据和解决回归问题。
它的目标是通过调整模型参数,使得模型的预测值与观测值之间的差异最小。
最小二乘法的核心思想是最小化误差的平方和。
对于给定的数据集,假设有一个线性模型y = β₀ + β₁x₁ + β₂x₂ + ... +βₙxₙ,其中β₀, β₁, β₂, ... , βₙ 是需要求解的未知参数,x₁, x₂, ... , xₙ 是自变量,y 是因变量。
那么对于每个样本点 (xᵢ, yᵢ),可以计算其预测值ŷᵢ = β₀ + β₁x₁ + β₂x₂ + ... + βₙxₙ,然后计算预测值与实际值之间的差异 eᵢ = yᵢ - ŷᵢ。
最小二乘法的目标是使得误差的平方和最小化,即最小化目标函数 E = ∑(yᵢ - ŷᵢ)²。
对于简单的线性回归问题,即只有一个自变量的情况下,最小二乘法可以通过解析方法求解参数的闭合解。
我们可以通过求偏导数,令目标函数对参数的偏导数等于零,求解出参数的最优解。
然而,对于复杂的非线性回归问题,解析方法通常不可行。
在实际应用中,最小二乘法通常使用迭代方法进行求解。
一种常用的迭代方法是梯度下降法。
梯度下降法通过反复进行参数更新的方式逐步降低目标函数的值,直到收敛到最优解。
具体而言,梯度下降法首先随机初始化参数的值,然后计算目标函数对于每个参数的偏导数,根据偏导数的方向更新参数的值。
迭代更新的过程可以通过下式表示:βₙ = βₙ - α(∂E/∂βₙ)其中,α 是学习率参数,控制每次更新参数的步长。
学习率需要适当选择,过小会导致收敛过慢,过大会导致震荡甚至不收敛。
最小二乘法除了可以用于线性回归问题,还可以用于其他类型的回归问题,比如多项式回归。
在多项式回归中,我们可以通过增加高次项来拟合非线性关系。
同样地,最小二乘法可以通过调整多项式的系数来使得拟合曲线与实际数据更加接近。
除了回归问题,最小二乘法还可以应用于其他领域,比如数据压缩、信号处理和统计建模等。
加权最小二乘定位算法-概述说明以及解释

加权最小二乘定位算法-概述说明以及解释1.引言1.1 概述加权最小二乘定位算法是一种用于定位和测量的数学方法,通过对测量数据进行加权处理,可以更准确地计算出目标的位置信息。
这种定位算法在无线通信、室内定位、导航系统等领域有着广泛的应用,能够提高定位的精度和可靠性。
本文将介绍加权最小二乘定位算法的原理、应用和优势,同时对其发展前景进行展望,旨在帮助读者更深入地了解和应用这一定位算法。
1.1 概述部分的内容1.2 文章结构本文主要分为引言、正文和结论三部分。
引言部分将对加权最小二乘定位算法进行概述,并介绍文章的结构和目的。
正文部分将详细介绍加权最小二乘定位算法的原理、应用和优势。
结论部分将总结加权最小二乘定位算法的特点,并展望其未来的发展前景,为读者提供对该算法的全面了解和展望。
通过这样的结构,读者可以系统地学习和理解加权最小二乘定位算法的相关知识,并对其未来的发展方向有一个清晰的认识。
1.3 目的本篇文章旨在介绍加权最小二乘定位算法的原理、应用和优势。
通过对加权最小二乘定位算法的深入理解和分析,读者可以更好地了解该算法在定位领域的作用和意义。
同时,我们也将总结该算法的优势和未来发展前景,以及对其在实际应用中的展望。
通过本文的阐述,希望能够为相关领域的研究者和实践者提供有益的参考和启发。
法的展望": {}}}}请编写文章1.3 目的部分的内容2.正文2.1 加权最小二乘定位算法原理加权最小二乘定位算法原理加权最小二乘定位算法是一种基于数学模型的定位方法,其原理是通过对测量结果进行加权处理,利用加权最小二乘法来估计目标的位置。
这种算法可以有效地处理具有噪声和误差的测量数据,提高定位精度和稳定性。
该算法的原理主要包括以下几个步骤:1.数据预处理:首先对收集到的定位数据进行预处理,包括滤波、去除异常值等操作,以保证数据的准确性和可靠性。
2.数学建模:根据实际定位场景和信号传播特性,建立数学模型,描述目标与测量节点之间的空间关系和信号传播规律。
GPS七参数的计算
通过三个或三个以上已知点求解七参数模型中的参数:不同空间直角坐标系之间的变换,其参数有(ΔX0,ΔY0,ΔZ0,ωX,ωY,ωZ,m)七个,其中(ΔX0,ΔY0,ΔZ0)为坐标平移量,(ωX,ωY,ωZ)为坐标轴间的三个旋转角度(又称为欧拉角),m为尺度因子。
七参数模型如图。
以WGS84坐标系转换为北京54坐标系为例:为计算模型中的七个参数,至少需要三个已知点的北京54空间坐标(X,Y,Z)BJ54和WGS-84空间坐标(X,Y,Z)WGS84,利用最小二乘法求出七参数。
然而,我们已知的三个公共控制点的坐标成果,一种是GPS 观测中可直接获得的WGS84椭球下的大地坐标经纬度(B,L,H),另一种是工程测量中使用的是高斯投影后的平面直角坐标(x,y,h)。
即已知的三个公共控制点的坐标成果就是这两种形式的坐标表来表示的。
首先,我们要把这两种形式的坐标都转换为七参数模型中的空间直角坐标。
步骤如下:1.将WGS84椭球下的大地坐标经纬度(B,L,H),采用WGS84椭球参数,转换为WGS84的空间直角坐标(X,Y,Z)2.将北京54投影平面直角坐标(x,y,h),采用克拉索夫斯基椭球参数,转换为大地坐标((B,L,H)后,再转换为北京54的空间直角坐标(X,Y,Z)。
3.将转换得到的三个公共点的北京54空间坐标(X,Y,Z)BJ54和WGS-84空间坐标(X,Y,Z)WGS84代入七参数模型中,求解七个参数。
以上转换过程十分复杂,即涉及到大地坐标经纬度与空间直角坐标的换算,还涉及到空间直角坐标与平面直角坐标的投影。
通常,我也使用已有的计算程序来求解七参数的,在很多这些求解七参数的程序中,直接采用的是WGS84的大地坐标和北京54大地坐标来计算,就是你只需输入三个已知点的一套WGS84的大地坐标和一套北京54大地坐标,即可为你求解出七参数。
在很多GPS基线解算与平差软件中,都提供了求解七参数/四参数的工具,你可以自己试试。
七参数转换求解范文

七参数转换求解范文七参数转换是一种用于将一个坐标系转换为另一个坐标系的数学方法。
该方法通常用于大地测量学和地理信息系统中,以实现不同坐标系统之间的转换。
七参数包括三个平移参数(ΔX、ΔY、ΔZ)、三个旋转参数(ω、φ、κ)以及一个尺度参数(s)。
最小二乘法是一种数学优化方法,用于拟合一个数学模型与实际观测数据之间的差异。
在七参数转换中,最小二乘法可用于确定平移参数、旋转参数和尺度参数的最佳数值。
最小二乘法的基本原理是将观测数据的残差的平方和最小化。
残差是指每个观测点的预测值与实际值之间的差异。
通过最小化残差的平方和,可以得到使模型最优的参数。
求解七参数转换的步骤如下:1.收集已知坐标点的变换关系数据,并确定参考坐标系和目标坐标系之间的转换关系。
2.利用最小二乘法,建立七参数转换模型。
模型可以表示为:X'=s(RΔX)+XY'=s(RΔY)+YZ'=s(RΔZ)+Z其中,(X,Y,Z)为目标坐标系中的点的坐标,(X',Y',Z')为参考坐标系中的点的坐标,R为旋转矩阵,s为尺度参数,ΔX、ΔY、ΔZ为平移参数。
3.利用已知坐标点的变换关系数据,求解七个参数的最佳数值。
最小二乘法求解参数的数值可以通过矩阵运算得到。
4.将求得的七个参数代入七参数转换模型中,即可将目标坐标系中的点的坐标转换为参考坐标系中的点的坐标。
在实际应用中,由于测量误差和观测数据的不确定性,七参数转换的求解可能存在一定的误差。
因此,在进行七参数转换时,需要对测量数据进行精确控制,并对求解结果进行误差分析。
此外,也可以采用多个已知坐标点的变换关系数据进行求解,以提高转换的准确性。
总之,七参数转换是一种常用的坐标转换方法,可以实现不同坐标系统之间的转换。
通过最小二乘法,可以求解七个参数的最佳数值,从而实现坐标转换。
在实际应用中,需要对测量数据进行精确控制,并对求解结果进行误差分析,以保证转换的准确性。
最小二乘求解方法——以布尔沙七参数为例

最小二乘求解方法——以布尔沙七参数为例最小二乘求解方法——以布尔沙七参数为例—Walkinfo—地信网论坛测绘和GIS计算中经常要用到《最小二乘法》求解。
如坐标转换中的四参数、Bursa七参数,等等。
若用matlib求解则需要学习其语法等,若使用他人的程序则需要求证自变量和因变量的关系,若自己编写c/c++程序则颇费周折。
求人不如求己,在Walk脚本中提供了类似于matlib的矩阵运算功能。
以求解Bursa七参数为例,其方程如下:r1 + 0 + 0 + 0 + r5*z0 - r6*y0 + r7*x0 = x1 - x00 + r2 + 0 - r4*z0 + 0 + r6*x0 + r7*y0 = y1 - y00 + 0 + r3 + r4*y0 - r5*x0 + 0 + r7*z0 = z1 - z0式中,源srcC(x0,y0,z0), 目标tarC(x1,y1,z1),r1,r2,...,r7为七参数。
bool solve7X(array &srcC, array &tarC, array &X){int n=srcC.getSize();//组成系数方程矩阵 A*X=L:double A[3*n][7];double L[3*n][1];for (int ii=0, k=0; ii<n; ii++){double x=srcC[ii][0], y=srcC[ii][1], z=srcC[ii][2];A[k][0]=1.; A[k][1]=0.; A[k][2]=0.; A[k][3]=0.; A[k][4]=z; A[k][5]=-y; A[k][6]=x;L[k++][0]=tarC[ii][0] - x;A[k][0]=0.; A[k][1]=1.; A[k][2]=0.; A[k][3]=-z; A[k][4]=0.; A[k][5]=x; A[k][6]=y;L[k++][0]=tarC[ii][1] - y;A[k][0]=0.; A[k][1]=0.; A[k][2]=1.; A[k][3]=y; A[k][4]=-x; A[k][5]=0.; A[k][6]=z;L[k++][0]=tarC[ii][2] - z;}//按最小二乘法组成法方程: (A'*A)*X = (A'*L) -- A'为A的转置矩阵// 设: N=(A'*A), W=(A'*L) 法方程为 N*X=Warray At=A.mtTranspose(); // A'array N=At.mtMultiply(A); // (A'*A)array W, W0=At.mtMultiply(L); // (A'*L)for (ii=0; ii<W0.getSize(); ii++) W.add(W0[ii][0]);//高斯主元素消元法求Xint o1 = X.mtGauss(N,W);return (o1 == 1);}//加入自己的重合点坐标,运行void main(){//目标点坐标array tarC={// N, E, H{2457352.726, 524988.625, 0.},{2459025.942, 534157.249, 0.},{2460338.594, 529155.636, 0.}};//源点坐标array srcC={// N, E, H{2457426.677, 525103.512, 0.},{2459100.114, 534273.255, 0.},{2460412.919, 529271.031, 0.}};array X;if (solve7X(srcC, tarC, X))trace("\n最小二乘解 X = " + toString(X)+"\n");}运行结果:最小二乘解X = [7]{227.642618576805, -54.7105352482602, 0.0, 0.0, 0.0, 1.66072305203775e-6, -0.000122372906272742}。
rtk浮点解 最小二乘法
rtk浮点解最小二乘法
RTK(实时动态差分定位)技术是现代测量技术中的一种高精度定位方法,广泛应用于测绘、无人驾驶、无人机等领域。
在RTK技术中,浮点解是一种关键的计算过程,而最小二乘法则是实现浮点解的重要手段。
浮点解是RTK定位中的一个重要步骤,它通过对接收到的卫星信号进行数据处理,计算出接收机的位置信息。
在这个过程中,最小二乘法作为一种数学优化技术,被广泛应用于处理观测数据中的误差和噪声。
最小二乘法的基本原理是通过最小化观测值与理论值之间的残差平方和,来求解最优的参数估计值。
在RTK浮点解中,最小二乘法可以帮助我们找到最符合观测数据的接收机位置参数。
通过构建观测方程,利用最小二乘法求解这些方程,我们可以得到接收机位置的浮点解。
RTK浮点解中采用最小二乘法的原因在于,最小二乘法具有优良的统计性质和计算稳定性。
它能够充分利用所有观测数据,通过数学优化手段,得到最优的位置参数估计值。
同时,最小二乘法还能够有效地处理观测数据中的误差和噪声,提高定位精度和稳定性。
总之,RTK浮点解中采用最小二乘法是一种有效的数据处理方法,它能够提高RTK 定位的精度和稳定性。
随着技术的不断发展,最小二乘法在RTK技术中的应用将会越来越广泛,为现代测量技术的发展提供有力支持。
多点定位算法 最小二乘
多点定位算法最小二乘
多点定位算法最小二乘是一种常用于解决多点定位问题的数学
方法。
该算法的目标是通过最小化误差的平方和来估计未知点的位置。
它在无网络信息的情况下,依靠一组测量数据来计算未知点的坐标。
在多点定位问题中,我们假设已知一组已知点的坐标,以及这些
已知点到未知点的测量距离。
我们的目标是通过这些测量数据来估计
未知点的坐标。
最小二乘算法使用的原理是通过最小化测量误差的平方和来确定
未知点的位置。
通过使用迭代算法,我们可以逐步调整估计的坐标值,直到达到最小误差。
具体操作中,最小二乘算法将测量数据转化为数学方程,其中包
括未知点的坐标和测量距离。
通过建立一个误差函数,根据未知点的
坐标和测量数据计算出误差值。
然后,算法通过迭代的方式调整未知
点的坐标值,使误差函数的值逐渐趋于最小。
最小二乘算法在实际应用中有着广泛的应用。
例如,在无线定位、导航系统和地理信息系统中,多点定位算法最小二乘被用于计算GPS
接收器的位置。
它也可以应用于其他领域,如无线传感器网络和机器
人导航。
总的来说,多点定位算法最小二乘是一种有效的数学方法,用于
解决多点定位问题。
通过最小化误差的平方和,该算法可以估计未知
点的位置,具有广泛的应用价值。
最小二乘法定位算法过程

最小二乘法定位算法过程嘿,咱今儿就来唠唠这个最小二乘法定位算法过程。
你说这玩意儿就像是在一个大迷宫里找宝藏!想象一下啊,我们面前有好多好多的数据点,就像迷宫里的一个个岔路口。
我们要通过这些数据点来确定一个准确的位置,这可不容易呢!首先呢,我们得把这些数据点都收集起来,这就好比是把迷宫里的线索都找齐了。
然后呢,我们开始分析这些数据点之间的关系。
这可不是随便看看就行的,得认真仔细地琢磨。
就好像你要在一群人中找出那个最特别的人一样,你得观察他们的各种特点。
在最小二乘法里,我们就是要找到那个能让所有数据点都尽量靠近的那个位置。
这过程可不简单啊!有时候那些数据点就像调皮的小孩子,东跑一个西跑一个,让你摸不着头脑。
但咱不能怕呀,得有耐心,慢慢去摆弄它们。
你看,我们通过不断地计算和调整,就像在一点点拼凑一幅拼图。
每一块拼图都很重要,少了哪一块都不行。
而且啊,这个过程中还得特别小心,不能出一点差错。
就跟走钢丝似的,稍微有点偏差,可能结果就完全不一样啦!有时候你可能会觉得,哎呀,怎么这么难啊!但别灰心,这就是挑战呀。
等你真的掌握了这个算法过程,那种成就感,可别提有多棒啦!咱再想想,要是没有最小二乘法,那好多事情可都没法做啦!比如导航,要是不能准确地定位,那你不就迷路啦?还有好多需要精确位置的地方,都得靠它呢!所以说呀,别小看这个最小二乘法定位算法过程,它可厉害着呢!虽然过程可能有点复杂,有点让人头疼,但只要咱用心去学,去钻研,肯定能搞明白的。
反正我觉得吧,这就像是一场冒险,充满了未知和挑战。
但只要我们勇敢地去面对,就一定能找到那个正确的答案,找到我们想要的那个位置。
加油吧,朋友们!让我们一起在最小二乘法的世界里畅游,去探索那些神奇的奥秘!。
最小二乘法解法
最小二乘法解法
最小二乘法是一种常见的线性回归分析方法,用于估计数据的参数。
其基本思想是将数据拟合成一条直线,使得所有数据点到该直线的距离之和最小。
这个距离可以用欧几里得距离或曼哈顿距离来计算。
最小二乘法的数学公式如下:
设有n个数据点(x1,y1),(x2,y2),...,(xn,yn),要拟合的直线
方程为y = ax + b,其中a、b为待求的参数。
则最小二乘法的目标是使得所有数据点到直线的距离之和最小,即:
min Σ(yi - axi - b)^2 (i=1,2,...,n)
对a、b分别求偏导,得到两个方程:
Σ(yi - axi - b) = 0
Σ(xi * (yi - axi - b)) = 0
将这两个方程联立,解得:
a = (nΣxiyi - ΣxiΣyi) / (nΣxi^2 - (Σxi)^2)
b = (Σyi - aΣxi) / n
这就是最小二乘法的解法。
需要注意的是,最小二乘法只适用于线性回归分析,即数据应该呈现出线性关系。
对于非线性数据,需要采用其他的回归分析方法。
- 1 -。
最小二乘法基本原理

最小二乘法基本原理《最小二乘法基本原理》嘿,朋友!今天咱们来聊聊最小二乘法的基本原理。
你知道吗,在生活中咱们经常会碰到一些数据,比如说测量一堆东西的长度、重量啥的。
可是呢,这些数据往往不是那么整齐,会有一些偏差。
那这时候怎么办呢?最小二乘法就来帮忙啦!简单来说,最小二乘法就是要找到一条线,或者一个方程,让这些数据点到这条线或者方程的距离的平方和最小。
为啥要距离的平方和呢?因为这样算出来的结果更稳定,更靠谱。
这就好像咱们在一堆乱麻中找一根最顺的线,让所有的点都能尽量靠近它。
找到这根线之后,咱们就能根据这个线来预测其他的情况啦。
比如说,如果 x 是 4,那根据咱们找到的直线,就能大概猜出 y 是多少。
最小二乘法就是个能帮咱们从一堆乱糟糟的数据里找出规律的好工具,让咱们能更好地理解和处理这些数据。
《最小二乘法基本原理》朋友,咱们来唠唠最小二乘法的基本原理。
想象一下,你面前有一堆数据点,就像天上的星星一样,散落在各处。
咱们想要找到一种规律,把它们串起来。
这时候,最小二乘法就闪亮登场啦!它的原理其实不难理解。
比如说,你做了几次实验,得到了一些结果,但是这些结果不是完全一样的,有高有低。
那咱们就想找一个办法,能找出一个最能代表这些结果的东西。
最小二乘法就是这么干的。
它会找出一条线或者一个式子,让每个数据点和这个线或者式子的差距尽量小。
怎么衡量这个差距呢?就是算每个点到这个线或者式子的距离,然后把这些距离的平方加起来。
为啥是平方呢?因为这样能避免正负距离相互抵消,更能反映出真实的差距情况。
然后呢,咱们就不断调整这个线或者式子的参数,就像调整收音机的频道一样,直到这个距离的平方和最小。
比如说,咱们有几个同学的考试成绩,有高有低。
咱们想用一个式子来表示他们成绩的大致趋势。
用最小二乘法,就能找到一个最合适的式子,能让咱们对未来同学的成绩有个大概的估计。
所以说啊,最小二乘法就是咱们在数据世界里的指南针,能帮咱们找到方向,找到规律。
最小二乘法通俗讲解方法

最小二乘法通俗讲解方法说白了,最小二乘法就是帮助我们找到一条直线,尽可能靠近一堆散落的点。
就像你在超市买水果,想挑选最成熟的苹果,但总是有些苹果看起来有点皱,那就得靠近一些,更挑剔一些,才能挑到最好。
数据点就是这些苹果,而那条直线就是你挑出来的“最佳选择”。
可别小看这条线,它能告诉你很多东西,比如说未来的趋势,或者某种关系的强弱。
怎么找到这条神奇的直线呢?很简单,咱们先给这些点打个分。
也就是说,咱们看每个点和这条线之间的距离,越近越好,离得远的就像你和你的初恋一样,遥不可及。
最小二乘法就是用这种方式,把每个点和直线之间的距离的平方相加,求一个最小值。
这听起来有点复杂,但实际上就是把这些“错误”加起来,尽量让它们的小脾气消失。
这样做的好处是什么呢?想象一下,你在做一个拼图,每一块都得合在一起才能形成一幅美丽的画。
最小二乘法帮助我们找到这些拼图块的完美位置,最终拼出一幅完整的图景。
就好比,你要用数据预测明天的天气,找到趋势,掌握风向,才能不被突如其来的雨淋个透心凉。
用这个方法还可以解决很多实际问题。
比如,想知道学习时间和考试成绩的关系,或者你每天的跑步距离和体重变化之间的联系。
就像你去健身房,想知道做多少次深蹲才能瘦下来,这些数据能够帮助你找到最佳的训练方案。
最小二乘法让这些关系变得清晰可见,不再是一团迷雾。
最小二乘法也不是完美的,它有时会受到一些异常值的影响。
这就好比你在群聊里发了一条消息,结果被某个不合群的小伙伴抢了风头,搞得大家都没法集中注意力。
不过,咱们可以通过一些技术手段,比如加权最小二乘法,来处理这些问题,保证我们的分析结果更靠谱。
最小二乘法就像是我们生活中的导航仪,帮我们在数据的海洋中找到方向。
它简单易懂,却能解决很多复杂的问题。
在这个快速变化的时代,掌握这样的方法,绝对能让你在职场和生活中如鱼得水,顺风顺水。
所以,下次你听到“最小二乘法”这几个字,不妨轻松一下,想象一下它就是你生活中的小助手,帮助你理清思路,找到最优解。
最小二乘法讲解

历史简介
• 1801年,意大利天文学家朱赛普·皮亚齐发现了第一颗小行星谷神星。 经过40天的跟踪观测后,由于谷神星运行至太阳背后,使得皮亚齐失 去了谷神星的位置。随后全世界的科学家利用皮亚齐的观测数据开始 寻找谷神星,但是根据大多数人计算的结果来寻找谷神星都没有结果。 时年24岁的高斯也计算了谷神星的轨道。奥地利天文学家海因里 希·奥尔伯斯根据高斯计算出来的轨道重新发现了谷神星。
5
例题
6
例题
7
例题
8
例题
9
例题
10
例题
11
例题
12
例题
13
例题
14
例题
15
习题
假设关于某设备的使用年限x和所支出的维修费用y (万元)有如下统计资料:
x
2
3
4
5
6
y
2.2 3.8 5.5 6.5 7.0
(1)求回归直线方程;
(2)估计使用10年 时,维修费用约是
多少?
16
习题
解:根据散点图知 x 与 y 成线性相关关系
(1)列表
xi
yi
xi 2
xi yi
2
2.2
4
4.4
3
3.8
9
11.4
4
5.5
16
22
5
6.5
25
32.5
6
7.0
36
42
合计 20
25
90 112.3
x4
y5
17
习题
112.3 5 4 5 b 90 5 42 1.23 a 5 1.23 4 0.08
2
历史简介
• 高斯使用的最小二乘法的方法发表于1809年他的著作《天体运动论》 中。
最小二乘算法
为最小,这种得到的拟合函数 ( x) 的方法,通常称为最小二乘法。多项式最小二乘法拟合 的 基 本 原 理 , 设 函 数 j ( x) x ( j 0,1,……, n) , 已 知 列 表 函 数
j
yi f ( xi ),(i 0,1,……, m) ,且 n m 。用多项式 pn ( x) 0 1 x ……+ n xn 逼近
最小二乘法在 RSSI 定位中的应用
1、RSSI 定位原理 在无线通信中信号的传播损耗转化为传播距离。 在理想的情况下接受信号的功率 与通信的距离的关系如式 1-1
PR (d0 ) d ( i ) P R (di ) d 0
(1-1)
式 1-1 中 d 0 是参考点到信号发送节点的距离,一般取 d 0 为 1m, PR (d0 ) 为在 d 0 处接受到的 功率 PR (di ) 是在 d i 处接受到的信号功率; 称为路径损耗指数,与实际的环境有关现在我 们用的是视距条件下,式 1-1 中的参考点的功率 PR (d0 ) 可以通过式 1-2 得出
A ( PR )dBm 10
这里我们设 d 0 =1m 那么我们得到的 d i 为 di 10
A ( PR )dBm 10
2、最小二乘算法原理
定 义 : 设 有 函 数
1 ( x), 2 ( x),……n ( x)
线
性
无
关
,
span{1 ( x), 2 ( x), 3 ( x),……,n ( x)} ,
40
60
图一、不同的衰落系数的仿真 通过分析误差我们可以得到如图二的累计分布函数,在分布函数中我们看到误差在 1.28 米 处的概率分布是 50%,1.32 米一下的误差概率为 90%。
第五章--最小二乘问题的解法
第五章 最小二乘问题的解法1.最小二乘问题 1)回归方程问题[]Ti i l i y t t)()()(1,,...,,m i ,...,2,1=是m 个实验点。
现要根据这些点确定y 与l 个物理量l t t t ,...,,21之间的关系式。
设这种关系式为),...,,,...,(11n l x x t t F y =,其中n x x ,...,1是方程中需要待定的n 个参数(系数)。
因此问题是如何通过)(n m m >个实验点,确定方程中的系数。
由于实验点的个数大于待定系数的个数,因此方程中系数的确定是一个超静定问题,无法按一般的方法进行求解。
此时将实验点到曲面距离最短的那个曲面作为所求曲面,从而求取该曲面方程。
即求解[]∑=-mi i i y x t F 12)()(),(min ,这就是最小二乘问题。
2)非线性方程组问题求解非线性方程组⎪⎪⎩⎪⎪⎨⎧===0),...,(............................0),...,(0),...,(11211n n nn x x f x x f x x f 可转化为求解如下形式的最小二乘问题。
∑=mi n i x x f 112),...,(min显而易见,最小二乘法的一般形式可写为)()(min x f x f T最小二乘法问题实际上是具有n 个变量的无约束极小化问题,前面解无约束优化问题的方法均可应用。
但是最小二乘问题具有一定的特殊性,即目标函数的表达式是由多个表达式的平方和组成,理应有更、更有效的方法。
这正是最小二乘解法要解决的问题。
2.线性最小二乘问题的解法最小二乘法的一般形式可写为)()(min x f x f T特别地,当b Ax x f -=)(,即)(x f 为线性函数时,则最小二乘问题可表示为:2min b Ax -1) 线性最小二乘问题解的条件定理1:*x 是线性最小二乘问题极小点的充要条件是*x 满足b A Ax A T T =。
最小二乘算法 公式 gnss

最小二乘算法公式 gnssGNSS(全球导航卫星系统)是指由多颗卫星组成的系统,可提供全球范围内的位置、速度和时间等信息。
在GNSS中,最小二乘算法是一种常用的数据处理方法,用于提高定位精度和减小误差。
最小二乘算法是一种基于最小化残差平方和的优化方法。
在GNSS 定位中,残差是指观测值与预测值之间的差异。
最小二乘算法的目标是通过调整参数的估计值,使得残差平方和最小化。
GNSS定位过程中,需要收集卫星信号,并通过接收机进行信号处理和定位计算。
在信号处理阶段,接收机会对接收到的信号进行解调和解码,获取伪距观测值。
伪距观测值是卫星信号的传播时间与接收机的时钟偏差之间的差值。
最小二乘算法可以应用于GNSS中的多个环节,包括卫星轨道估计、接收机时钟校准、接收机位置估计等。
在卫星轨道估计中,最小二乘算法可以通过拟合观测值和预测值之间的残差,来估计卫星的轨道参数,从而提高定位的精度。
在接收机时钟校准中,最小二乘算法可以通过拟合接收机的观测值和预测值之间的残差,来校准接收机的时钟偏差,从而减小定位误差。
在接收机位置估计中,最小二乘算法可以通过拟合多个卫星的伪距观测值和接收机的位置预测值之间的残差,来估计接收机的位置坐标。
最小二乘算法的优点是简单易懂、计算效率高。
它可以通过求解线性方程组的正规方程或利用矩阵的特征值和特征向量来实现。
在实际应用中,最小二乘算法可以通过迭代求解的方式,逐步调整参数的估计值,以达到最小化残差平方和的目标。
然而,最小二乘算法也存在一些局限性。
首先,它假设观测误差是独立同分布的,且服从正态分布。
如果观测误差不满足这些假设,最小二乘算法的结果可能会偏离真实值。
其次,最小二乘算法对异常值敏感,即一个极端的观测值可能会对结果产生较大影响。
因此,在应用最小二乘算法时,需要对数据进行预处理,剔除异常值或采用鲁棒估计方法。
最小二乘算法是GNSS定位中常用的数据处理方法,通过最小化残差平方和来提高定位精度和减小误差。
最小二乘的基本原理
最小二乘的基本原理嘿,朋友们!今天咱来聊聊最小二乘的基本原理呀!这玩意儿就像是一把神奇的钥匙,能帮咱解决好多问题呢!你看啊,最小二乘就好比是我们在一堆杂乱的数据中找规律的好帮手。
想象一下,我们面前有一堆七零八落的点,就像一群调皮的小孩子到处乱跑。
那我们怎么才能找到一条线或者一个模型,能最好地把这些点串起来呢?这就是最小二乘要干的事儿啦!它的想法特别简单又巧妙。
它就是要让这些点到我们找到的那条线或者那个模型的距离的平方和最小。
这就好像我们要让这些调皮的小孩子尽可能地靠近我们规定的路线,而且是让他们总体上离得最近。
这样一来,我们不就找到了一个最能代表这些点的规律了嘛!比如说,我们想知道身高和体重之间有没有啥关系。
那我们就去收集好多人的身高和体重的数据,然后用最小二乘去找到那个最合适的模型。
说不定就能发现,哎呀,原来身高越高,体重可能就越重呢!这多有意思呀!而且最小二乘用处可大了去了。
在好多领域都能看到它的身影呢!比如在统计学里,它能帮我们分析数据,找到那些隐藏的规律;在工程领域,它能让我们设计出更好的产品;在经济学里,它能帮我们预测市场趋势。
这不就像是一个万能的工具嘛!你说它神奇不神奇?它就像是一个默默工作的小工匠,一点点地把那些杂乱的数据雕琢成有意义的模型和规律。
我们平时可能都没意识到它的存在,但它却在背后发挥着巨大的作用呢!那我们怎么用最小二乘呢?其实也不难啦!只要我们有数据,然后通过一些计算,就能找到那个最合适的模型啦!当然啦,这中间可能会涉及到一些数学知识和计算,但别担心,只要我们慢慢学,肯定能掌握的。
哎呀,最小二乘这东西真的是太好啦!它让我们能从那些看似毫无头绪的数据中找到宝藏,能让我们更好地理解这个世界。
我们可不能小瞧了它呀!它虽然不声不响的,但作用可大了去了呢!所以呀,大家都要好好了解了解最小二乘,说不定哪天就能派上大用场啦!这就是我对最小二乘基本原理的理解,你们觉得怎么样呢?原创不易,请尊重原创,谢谢!。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最小二乘定位算法
单星定位的局限性: 低动态用户(时序测量定位) 不能完成连续定位 定位精度不高(低轨受地球影响大) 双星定位的局限性: 有源定位,定位滞后误差大,不适应高动态定位 在低纬度地区几何误差因子大,定位精度不高 三星定位的局限性: 无源定位需要其他设备的支持 低纬度地区几何误差因子大,定位精度差
卫星导航理论
单星定位原理示意图
卫
星 ti
ti+T
S ri ri+
1
接 收 t 机 i i
ti T i 1
原理: fs dt
ti
ti T
ti T i 1
ti i
( f s f d )dt
定位方程: ri ri1 i i1 f d dt , i 1 ~ 4 s ti i
ri* ( yu yu 0 ) zu P0
( zu zu 0 ) ctu ctsi ni
P0
ˆi 0 r
xu 0 xsi y y z z ( xu xu 0 ) u 0 si ( yu yu 0 ) u 0 si ( zu zu 0 ) ctu ctsi ni ˆi 0 ˆi 0 ˆi 0 r r r
5
5.5
6
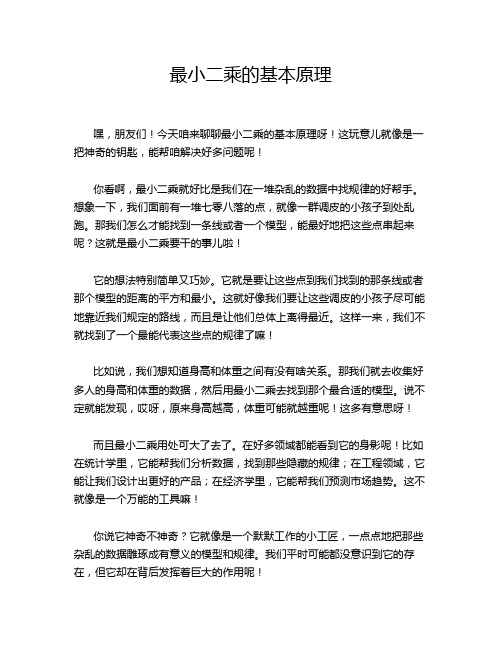
迭代最小二乘运算结果(时空位置曲线) 卫星导航理论
卫星导航理论
卫星时间的归化
归化的意义: 将各个卫星位置反推到定位时刻所对应 的发射时刻位置
卫星导航理论
时间误差带来的位置外推误差
卫星速度: V=ω(6370+20200)*1000=3864m/s 若传播时延测量误差为3m,卫星位 置外推误差3*3864/c,可以忽略
25795km(89ms) 20200km(67ms)
N
Δuk=Hk+Δrk k=k+1
( xk 1 xk ) 2 ( yk 1 yk ) 2 ( yk 1 yk ) 2
Y
输出Δuk
迭代最小二乘算法流程图
卫星导航理论
多星定位方程的解算—最小二乘算法
6 x 10
6
5
X Y Z t
4
3
2
1
0
1
1.5
2
2.5
3
3.5
4
4.5
Δts3
Δts4
卫星导航理论
多星定位方程及其线性化
ri* ( xu xsi )2 ( yu ysi ) 2 ( zu zsi ) 2 ctu ctsi ni
ri* ˆi 0 ri r xu
*
i4
测量方程
ri* ( xu xu 0 ) yu P0
卫星导航理论
多星定位方程的解算—最小二乘算法
初始位置(xu0,you,zu0)
Δr0 = H 0Δu 0
k=0
矩阵表示 最小二乘算法
Δu 0 = H 0 Δr0
输入伪距测量值
(H 0T H 0 ) 1 H 0T Δr0
计算Δrk,H0k
Δu k = (H k T H k ) 1 H k T Δrk 迭代最小二乘算法
* ˆ10 ct s1 n1 r10 r1 r r r * r ˆ c t n 20 2 20 s2 2 Δr0 * r30 r3 r ˆ30 ct s 3 n2 * ˆ40 ct s 4 n2 r40 r4 r
解的存在性讨论:
1.定位方程的意义,是时空四维空间中,在同一时刻卫星到用户之间的距离
2.测量方程的意义(不相同, 3.在定位中有六个时间基准,需要将测量方程等效到定位方程 4.测量噪声使方程组无解。
结论:方程组为矛盾方程组,在定位解算时,要注意时 间的归化(统一)
t T
卫星导航理论
双星有源定位示意图
同步轨道
用户
主控站
赤道
S1
S2
卫星导航理论
双星有源定位示意图
ru2
主控站广播信号 主控站广播信号 (用户位置给出)
ru1
主控站
卫星-U转发信号
S1
卫星-C转发信号
rs1
S2
用户上行信号
rs1 rs2
rs2
User
r1 r1 r2
r2
卫星导航理论
三星无源定位示意图
ˆi 0 ( xsi xu 0 ) 2 ( ysi yu 0 ) 2 ( zsi zu 0 ) 2 ni为测量噪声,r x0 xu xu 0 , y0 yu yu 0 , z0 zu zu 0
卫星导航
多星定位方程的矩阵表示
记方向余弦 xi 0
y10 y 20 y 30 y 40
z10 z 20 z 30 z 40
1 1 1 1
Δr0 = H0Δu0
矩阵表示
u LS (H T H ) 1 H T r
最小二乘算法:
u H 1r
卫星导航
多星定位方程的解算
x0 y 0 Δu 0 z0 c t u
xu 0 xsi y ysi z z , yi 0 u 0 , zi 0 u 0 si ˆi 0 ˆi 0 ˆi 0 r r r
x10 H 0 x 20 x 30 x 40
气压高度表
同步轨道
用户
主控站
赤道
S1
S3
S2
卫星导航理论
多星无源定位示意图
卫星导航理论
多星无源定位示意图
子帧头 系统时 U Δtu S1 S2 Δts1 Δts2 S3 S4 τ1 τ2* τ2 τ3* τ3 τ4* τ4 τi*= τi+ Δtsi- Δtu τ1
*
用户锁定卫星钟
整数ms
t t t t t t
Δr0 = H0Δu0 矩阵表示
i4 测量方程 i4 定位方程 ri* ( xu xsi ) 2 ( yu ysi ) 2 ( zu zsi ) 2 ctu ctsi ni ri ( xu xsi ) 2 ( yu ysi ) 2 ( zu zsi ) 2 ctu