最小二乘协作定位算法
点云重定位算法

点云重定位算法的主要过程是在获得DM码中心坐标后,利用其与花盆点云的相对位置来对作物点云进行重定位,即实现各次测量点云的对齐。
具体步骤如下:
在DM码中心坐标的等高处从整体点云中选取一定范围内的点。
用最小二乘法对这组点的(x,y)坐标进行圆拟合,获得圆心的(x,y)坐标,并将该圆心的z坐标设为DM码中心的z坐标,然后构建圆心到DM码中心的向量。
将整体点云进行变换:绕Z轴旋转以使圆心到DM码中心的向量指向Y轴负方向,并沿X、Y轴方向平移以使圆心的x和y坐标为0。
物联网设备定位与追踪技术考试

物联网设备定位与追踪技术考试(答案见尾页)一、选择题1. 物联网设备定位与追踪技术中,常用的定位方法有:A. GPS定位B. RFID定位C. 蓝牙定位D. WIFI定位2. 在物联网设备追踪方面,以下哪些技术可以实现设备的实时追踪:A. GPS定位B. RFID定位C. 蓝牙定位D. 网络定位3. 物联网中的RFID技术主要依赖于:A. 射频信号B. 超声波信号C. 红外信号D. 光信号4. 对于室内定位,以下哪种技术的精度较高:A. GPS定位B. RFID定位C. 蓝牙定位D. WIFI定位5. 为了提高物联网设备定位的准确性,以下哪些方法可以采用:A. 多传感器融合B. 数据关联C. 机器学习D. 人工智能6. 在物联网设备定位过程中,可能导致漂移现象的原因是:A. 信号多径效应B. 信号衰减C. 测量误差D. 传感器漂移7. 以下哪些传感器可以用于实现物联网设备的定位:A. GPS模块B. RFID读写器C. 基站D. 红外传感器8. 物联网设备追踪中,哪种定位方法对环境变化的影响较小:A. GPS定位B. RFID定位C. 蓝牙定位D. WIFI定位9. 针对室内定位,以下哪种算法可以提高定位的精度:A. 卡尔曼滤波器B. 粒子滤波器C. 扩展卡尔曼滤波器D. 贝叶斯滤波器10. 以下哪些设备可以用于实现物联网设备的定位和追踪:A. 智能终端B. 传感器节点C. 数据中心D. 云服务器11. 关于物联网设备的定位,以下哪个说法是正确的:A. 定位只需要使用一种传感器即可B. 定位需要使用多种传感器进行数据融合以提高精度C. 定位只需要考虑位置信息,无需考虑时间信息D. 定位只需要考虑设备所在地的经纬度信息12. 下列哪项技术可以用于在室内环境中实现物联网设备的定位?A. GPS技术B. RFID技术C. 蓝牙技术D. 红外技术13. 在物联网设备定位过程中,哪个因素对于定位精度的提升最为关键?A. 传感器的分辨率和灵敏度B. 采集数据的频率C. 定位算法的复杂度D. 设备之间的距离14. 下列哪种定位技术可以在全球范围内实现定位?A. GPS技术B. RFID技术C. 基站定位技术D. 红外技术15. 下列哪种定位技术适用于长距离定位?A. GPS技术B. RFID技术C. 基站定位技术D. 磁条技术16. 下列哪种定位技术可以在室内环境中实现精确定位?A. GPS技术B. RFID技术C. 基站定位技术D. 激光测距技术17. 下列哪种设备可以用于实现物联网设备的定位和追踪?A. 传感器节点B. 数据中心C. 智能终端D. 云服务器18. 下列哪种算法可以用于处理传感器采集的数据,以实现物联网设备的定位?A. 卡尔曼滤波器B. 粒子滤波器C. 神经网络D. 决策树19. 下列哪种设备可以用于在物联网设备中存储和处理定位数据?A. 传感器节点B. 数据中心C. 智能终端D. 云服务器20. 下列哪种定位技术可以在复杂环境下实现精确定位?A. GPS技术B. RFID技术C. 基站定位技术D. 磁条技术21. 下列哪种定位技术不需要依赖基站或基准站,能够在室内外环境中实现定位?A. GPS技术B. RFID技术C. 基站定位技术D. 蓝牙技术22. 下列哪种定位技术可以实现高精度定位?B. RFID技术C. 基站定位技术D. 激光测距技术23. 下列哪种定位技术可以实现连续、实时的定位?A. GPS技术B. RFID技术C. 基站定位技术D. 蓝牙技术24. 下列哪种定位技术可以实现多平台、多设备之间的定位数据同步和共享?A. GPS技术B. RFID技术C. 基站定位技术D. 云计算技术25. 下列哪种定位技术可以实现对运动状态下的物联网设备的精确定位?A. GPS技术B. RFID技术C. 基站定位技术D. 惯性导航技术26. 下列哪种定位技术可以在各种环境条件下实现稳定、精准的定位?A. GPS技术B. RFID技术C. 基站定位技术D. 磁条技术27. 下列哪种定位技术可以通过与其他设备或系统的协同工作实现更精确的定位?A. GPS技术B. RFID技术C. 基站定位技术28. 下列哪种定位技术可以实现大规模物联网设备的快速、准确定位?A. GPS技术B. RFID技术C. 基站定位技术D. 云计算技术29. 下列哪种定位技术可以实现对物联网设备的精确定位和高精度追踪?A. GPS技术B. RFID技术C. 基站定位技术D. 激光测距技术30. 有关物联网设备定位与追踪技术,以下哪个说法是错误的:A. 定位需要收集设备的位置和时间信息B. 常见的定位技术包括GPS、RFID和基站定位C. 定位精度和可靠性取决于所使用的传感器和技术D. 室内定位通常使用WIFI指纹定位31. 下列哪种设备可以作为物联网设备的定位传感器:A. 加速度计B. 陀螺仪C. 磁力计D. 压力传感器32. 下列哪种技术可以在室内环境中实现准确的定位:A. GPS技术B. RFID技术C. 基站定位技术D. 磁条技术33. 下列哪种定位算法可以处理多个传感器的信息,提高定位精度:A. 单传感器定位算法B. 卡尔曼滤波器定位算法C. 粒子滤波器定位算法D. 最小二乘法定位算法34. 下列哪种定位技术可以在全球范围内实现定位:A. GPS技术B. RFID技术C. 基站定位技术D. 磁条技术35. 下列哪种定位技术可以在复杂的环境中实现高精度的定位:A. GPS技术B. RFID技术C. 基站定位技术D. 激光测距技术36. 下列哪种定位技术可以实现对动态移动的物联网设备的精确定位:A. GPS技术B. RFID技术C. 基站定位技术D. 惯性导航技术37. 下列哪种定位技术可以通过分析不同传感器的数据来实现厘米级别的定位:A. GPS技术B. RFID技术C. 基站定位技术D. 高精度测距技术38. 下列哪种定位技术可以实现对物联网设备的精确定位和长时间追踪:A. GPS技术B. RFID技术C. 基站定位技术39. 下列哪种定位技术可以根据环境条件自适应调整定位精度:A. GPS技术B. RFID技术C. 基站定位技术D. 云计算技术40. 关于物联网设备定位,以下哪个说法是正确的:A. 定位只需要使用一种传感器即可B. 定位需要使用多种传感器进行数据融合以提高精度C. 定位只需要考虑位置信息,无需考虑时间信息D. 定位只需要考虑设备所在地的经纬度信息41. 下列哪项技术可以用于在室内环境中实现物联网设备的定位?A. GPS技术B. RFID技术C. 蓝牙技术D. Wi-Fi技术42. 下列哪种定位技术可以实现对运动状态下的物联网设备的精确定位?A. GPS技术B. RFID技术C. 基站定位技术D. 磁条技术43. 下列哪种定位技术可以在全球范围内实现定位?A. GPS技术B. RFID技术C. 基站定位技术D. 磁条技术44. 下列哪种定位技术适用于大规模物联网设备的快速、准确定位?B. RFID技术C. 基站定位技术D. 激光测距技术45. 下列哪种定位技术可以实现对物联网设备的高精度追踪?A. GPS技术B. RFID技术C. 基站定位技术D. 云计算技术46. 下列哪种定位算法可以处理多个传感器的信息,提高定位精度?A. 单传感器定位算法B. 卡尔曼滤波器定位算法C. 粒子滤波器定位算法D. 最小二乘法定位算法47. 下列哪种设备可以作为物联网设备的定位传感器?A. 加速度计B. 陀螺仪C. 磁力计D. 压力传感器48. 下列哪种定位技术可以实现对物联网设备的长距离定位?A. GPS技术B. RFID技术C. 基站定位技术D. 蓝牙技术49. 下列哪种定位技术可以实现对物联网设备在复杂环境中实现高精度定位?A. GPS技术B. RFID技术C. 基站定位技术D. 激光测距技术二、问答题1. 什么是物联网设备定位与追踪技术?2. 如何实现物联网设备的定位?3. 如何实现物联网设备的追踪?4. 如何确保物联网设备定位与追踪的准确性?5. 在物联网设备定位与追踪中,有哪些应用场景?6. 如何实现物联网设备的远程监控与管理?7. 物联网设备定位与追踪技术的发展趋势是什么?8. 在物联网设备定位与追踪中,可能遇到哪些挑战?参考答案选择题:1. ABD2. ABD3. A4. C5. ABD6. D7. ABD8. C9. A 10. ABD11. B 12. B 13. A 14. A 15. A 16. B 17. A 18. A 19. B 20. A21. B 22. D 23. A 24. D 25. D 26. A 27. D 28. D 29. D 30. D31. A 32. B 33. B 34. A 35. D 36. D 37. D 38. D 39. 40. B41. B 42. D 43. A 44. D 45. D 46. B 47. A 48. A 49. D问答题:1. 什么是物联网设备定位与追踪技术?物联网设备定位与追踪技术是一种利用物联网技术和信号传播特性,实现对设备的精确定位和实时追踪的技术。
室内定位常用算法概述
室内定位常用算法概述一.室内定位目的和意义随着数据业务和多媒体业务的快速增加,人们对定位与导航的需求日益增大,尤其在复杂的室内环境,如机场大厅、展厅、仓库、超市、图书馆、地下停车场、矿井等环境中,常常需要确定移动终端或其持有者、设施与物品在室内的位置信息。
但是受定位时间、定位精度以及复杂室内环境等条件的限制,比较完善的定位技术目前还无法很好地利用。
因此,专家学者提出了许多室内定位技术解决方案,如A-GPS定位技术、超声波定位技术、蓝牙技术、红外线技术、射频识别技术、超宽带技术、无线局域网络、光跟踪定位技术,以及图像分析、信标定位、计算机视觉定位技术等等。
这些室内定位技术从总体上可归纳为几类,即GNSS 技术(如伪卫星等),无线定位技术(无线通信信号、射频无线标签、超声波、光跟踪、无线传感器定位技术等),其它定位技术(计算机视觉、航位推算等),以及GNSS和无线定位组合的定位技术(A-GPS或A-GNSS)。
由于在室内环境下对于不同的建筑物而言,室内布置,材料结构,建筑物尺度的不同导致了信号的路径损耗很大,与此同时,建筑物的内在结构会引起信号的反射,绕射,折射和散射,形成多径现象,使得接收信号的幅度,相位和到达时间发生变化,造成信号的损失,定位的难度大。
虽然室内定位是定位技术的一种,和室外的无线定位技术相比有一定的共性,但是室内环境的复杂性和对定位精度和安全性的特殊要求,使得室内无线定位技术有着不同于普通定位系统的鲜明特点,而且这些特点是户外定位技术所不具备的。
因此,两者区域的标识和划分标准是不同的。
基于室内定位的诸多特点,室内定位技术和定位算法已成为各国科技工作者研究的热点。
如何提高定位精度仍将是今后研究的重点。
二. 室内定位技术的国内外发展趋势室内GPS定位技术GPS是目前应用最为广泛的定位技术。
当GPS接收机在室内工作时,由于信号受建筑物的影响而大大衰减,定位精度也很低,要想达到室外一样直接从卫星广播中提取导航数据和时间信息是不可能的。
加权最小二乘定位算法-概述说明以及解释

加权最小二乘定位算法-概述说明以及解释1.引言1.1 概述加权最小二乘定位算法是一种用于定位和测量的数学方法,通过对测量数据进行加权处理,可以更准确地计算出目标的位置信息。
这种定位算法在无线通信、室内定位、导航系统等领域有着广泛的应用,能够提高定位的精度和可靠性。
本文将介绍加权最小二乘定位算法的原理、应用和优势,同时对其发展前景进行展望,旨在帮助读者更深入地了解和应用这一定位算法。
1.1 概述部分的内容1.2 文章结构本文主要分为引言、正文和结论三部分。
引言部分将对加权最小二乘定位算法进行概述,并介绍文章的结构和目的。
正文部分将详细介绍加权最小二乘定位算法的原理、应用和优势。
结论部分将总结加权最小二乘定位算法的特点,并展望其未来的发展前景,为读者提供对该算法的全面了解和展望。
通过这样的结构,读者可以系统地学习和理解加权最小二乘定位算法的相关知识,并对其未来的发展方向有一个清晰的认识。
1.3 目的本篇文章旨在介绍加权最小二乘定位算法的原理、应用和优势。
通过对加权最小二乘定位算法的深入理解和分析,读者可以更好地了解该算法在定位领域的作用和意义。
同时,我们也将总结该算法的优势和未来发展前景,以及对其在实际应用中的展望。
通过本文的阐述,希望能够为相关领域的研究者和实践者提供有益的参考和启发。
法的展望": {}}}}请编写文章1.3 目的部分的内容2.正文2.1 加权最小二乘定位算法原理加权最小二乘定位算法原理加权最小二乘定位算法是一种基于数学模型的定位方法,其原理是通过对测量结果进行加权处理,利用加权最小二乘法来估计目标的位置。
这种算法可以有效地处理具有噪声和误差的测量数据,提高定位精度和稳定性。
该算法的原理主要包括以下几个步骤:1.数据预处理:首先对收集到的定位数据进行预处理,包括滤波、去除异常值等操作,以保证数据的准确性和可靠性。
2.数学建模:根据实际定位场景和信号传播特性,建立数学模型,描述目标与测量节点之间的空间关系和信号传播规律。
7最小二乘定位算解析

最小二乘定位算法
单星定位的局限性: 低动态用户(时序测量定位) 不能完成连续定位 定位精度不高(低轨受地球影响大) 双星定位的局限性: 有源定位,定位滞后误差大,不适应高动态定位 在低纬度地区几何误差因子大,定位精度不高 三星定位的局限性: 无源定位需要其他设备的支持 低纬度地区几何误差因子大,定位精度差
卫星导航理论
单星定位原理示意图
卫
星 ti
ti+T
S ri ri+
1
接 收 t 机 i i
ti T i 1
原理: fs dt
ti
ti T
ti T i 1
ti i
( f s f d )dt
定位方程: ri ri1 i i1 f d dt , i 1 ~ 4 s ti i
ri* ( yu yu 0 ) zu P0
( zu zu 0 ) ctu ctsi ni
P0
ˆi 0 r
xu 0 xsi y y z z ( xu xu 0 ) u 0 si ( yu yu 0 ) u 0 si ( zu zu 0 ) ctu ctsi ni ˆi 0 ˆi 0 ˆi 0 r r r
5
5.5
6
迭代最小二乘运算结果(时空位置曲线) 卫星导航理论
卫星导航理论
卫星时间的归化
归化的意义: 将各个卫星位置反推到定位时刻所对应 的发射时刻位置
卫星导航理论
时间误差带来的位置外推误差
卫星速度: V=ω(6370+20200)*1000=3864m/s 若传播时延测量误差为3m,卫星位 置外推误差3*3864/c,可以忽略
无线传感器网络中的协作式定位算法研究

无线传感器网络中的协作式定位算法研究随着物联网技术的发展,无线传感器网络(Wireless Sensor Network, WSN)已经成为研究的热点之一。
在WSN中,定位技术是一项非常关键的技术,可以帮助用户实时监测、控制和管理物联网设备。
然而,WSN中的节点往往分布在复杂的环境中,节点之间的通信、安装位置的不同等问题都会对定位算法的准确性产生一定的影响。
因此,协作式定位算法的研究成为了WSN领域的一个热门话题。
一、协作式定位算法的基本思想协作式定位是指利用一组分布在空间中的节点,通过相互之间的协作来推算目标的位置信息的一种位置推断技术。
在WSN中,协作式定位算法的基本思想就是将所有节点的位置数据共享,通过算法融合得到目标节点的位置信息。
二、协作式定位算法的主要类型1. 基于距离的协作式定位算法基于距离的协作式定位算法是指通过测量目标节点和其他节点之间的距离来推断目标节点的位置。
这类算法最常用的技术是收发信号强度指示(Received Signal Strength Indicator, RSSI)和测距技术。
收发信号强度指示是利用无线电信号的信号衰减以及用于检测信号的无线电天线的特性来估计信号强度的一种测量技术,可以在WSN中用于测量节点之间的距离。
测距技术是通过信号的时间差或多径效应等方式测量节点之间的距离。
这种方法具有很高的精度和可靠性,但常常需要额外的硬件设备支持。
2. 基于角度的协作式定位算法基于角度的协作式定位算法是通过测量节点之间的角度信息来推断目标节点的位置。
这种算法最常用的技术是方向测量方法,例如TOA(Time Of Arrival)和AOA(Angle Of Arrival)等。
这种算法的缺点是容易受到环境的干扰,如建筑物的遮挡、节点的位置偏移等问题。
3. 基于时间的协作式定位算法基于时间的协作式定位算法是通过节点之间的时间信息来推断目标节点的位置。
最常用的技术是TDMA(Time Division Multiple Access)和TDOA(Time Difference Of Arrival)等。
基于加权非线性最小二乘的无源协同定位

1 引言
现代战争中,对目标进行定位跟踪越来越起着 突出的作用[1],然而以雷达为代表的有源探测方式 面 临 四 大 威 胁 。 在 这 种 情 况 下 ,采 用 无 源 协 同 定 位 的 [2~6] 方法对辐射源定位显得更有意义。按传感 器的数目[5]可以分为:多传感器和单传感器无源定 位。多传感器无源协同定位可以利用传感器间的 互补和冗余信息得到比单传感器无源定位更快速 和更高的精度,因此得到广泛的应用。在无源协同 定位中,利用辐射信号到达传感器的角度量测信息 进行目标定位是最常用的无源定位技术之一,本文 主要讨论基于角度量测信息[7~8]的多传感器无源协 同定位。
(1) (2)
z
C
o y
φ1
φ2
x
S1
S2
θ2
θ1
图 1 传感器与目标的分布关系
3 算法原理
3.1 定位初值计算
在目标初始值估计中,把多传感器的观测值组
合成线性方程组: AX = b
其中,目标直角坐标位置 X = [x y z]T ;A 和 b 分
别是与传感器位置及观测数据有关的系数矩阵和
向量,表达式如下。
计算机与数字工程
901
2 无源协同定位测角模型
假设无源传感器网络有 N 个传感器,其它传感
器为辅传感器。目标相对于传感器的方位角和俯
仰角分别为 θi 和 φi ,其中 i = 1 2 N ,量测值表
示如下。
θi
rtklib伪距单点定位最小二乘法

RTKLIB是一种用于实时定位和测量的开源软件,它支持全球导航卫星系统(GNSS),包括GPS、GLONASS、Galileo和北斗。
在RTKLIB 中,伪距单点定位是一种常用的定位方法,它通过测量接收机和卫星之间的伪距距离来实现定位。
在伪距单点定位中,最小二乘法是一种常用的数学模型,它通过最小化测量值与估计值之间的误差平方和,来估计未知参数。
在RTKLIB中,最小二乘法被广泛应用于伪距单点定位中,通过对接收机和卫星之间的伪距距离进行最小二乘估计,来实现定位。
伪距单点定位最小二乘法的算法主要包括以下步骤:1. 数据采集:需要在接收机上采集卫星信号的伪距数据。
2. 估计参数:利用最小二乘法对接收机位置和钟差等参数进行估计。
3. 残差计算:计算估计值与测量值之间的残差,即观测值与估计值之间的差值。
4. 参数调整:根据残差的大小,调整参数的估计值,使残差最小化。
5. 定位结果:通过调整后的参数估计值,得到接收机的定位结果。
伪距单点定位最小二乘法在实际应用中具有一定的优势和局限性。
优势在于算法简单易懂,计算速度较快,适用于单点定位的室外环境。
然而,由于伪距单点定位依赖于接收机与卫星之间的伪距距离,容易受到环境遮挡、多径效应等因素的影响,精度较低,定位误差较大。
在实际应用中,为了提高伪距单点定位最小二乘法的精度和稳定性,可以结合多频观测、多站观测、差分定位等技术,以及对环境遮挡的优化和多径效应的抑制,来改善定位精度。
另外,还可以考虑使用RTK(实时运动定位)技术,通过基站进行差分改正,进一步提高定位精度和可靠性。
伪距单点定位最小二乘法作为RTKLIB定位的一种常用方法,在实际应用中需要结合多种技术和方法,以提高定位精度和可靠性。
通过不断的优化和改进,可以更好地适应各种复杂的定位环接下来,让我们深入探讨一下伪距单点定位最小二乘法在RTKLIB中的具体应用。
我们来详细了解一下伪距单点定位的原理和基本步骤。
1. 伪距单点定位原理伪距单点定位是一种基于GNSS测量解算的定位方法,它通过测量接收机和卫星之间的伪距距离来确定接收机的位置。
多点定位算法 最小二乘
多点定位算法最小二乘
多点定位算法最小二乘是一种常用于解决多点定位问题的数学
方法。
该算法的目标是通过最小化误差的平方和来估计未知点的位置。
它在无网络信息的情况下,依靠一组测量数据来计算未知点的坐标。
在多点定位问题中,我们假设已知一组已知点的坐标,以及这些
已知点到未知点的测量距离。
我们的目标是通过这些测量数据来估计
未知点的坐标。
最小二乘算法使用的原理是通过最小化测量误差的平方和来确定
未知点的位置。
通过使用迭代算法,我们可以逐步调整估计的坐标值,直到达到最小误差。
具体操作中,最小二乘算法将测量数据转化为数学方程,其中包
括未知点的坐标和测量距离。
通过建立一个误差函数,根据未知点的
坐标和测量数据计算出误差值。
然后,算法通过迭代的方式调整未知
点的坐标值,使误差函数的值逐渐趋于最小。
最小二乘算法在实际应用中有着广泛的应用。
例如,在无线定位、导航系统和地理信息系统中,多点定位算法最小二乘被用于计算GPS
接收器的位置。
它也可以应用于其他领域,如无线传感器网络和机器
人导航。
总的来说,多点定位算法最小二乘是一种有效的数学方法,用于
解决多点定位问题。
通过最小化误差的平方和,该算法可以估计未知
点的位置,具有广泛的应用价值。
最小二乘法定位算法过程

最小二乘法定位算法过程嘿,咱今儿就来唠唠这个最小二乘法定位算法过程。
你说这玩意儿就像是在一个大迷宫里找宝藏!想象一下啊,我们面前有好多好多的数据点,就像迷宫里的一个个岔路口。
我们要通过这些数据点来确定一个准确的位置,这可不容易呢!首先呢,我们得把这些数据点都收集起来,这就好比是把迷宫里的线索都找齐了。
然后呢,我们开始分析这些数据点之间的关系。
这可不是随便看看就行的,得认真仔细地琢磨。
就好像你要在一群人中找出那个最特别的人一样,你得观察他们的各种特点。
在最小二乘法里,我们就是要找到那个能让所有数据点都尽量靠近的那个位置。
这过程可不简单啊!有时候那些数据点就像调皮的小孩子,东跑一个西跑一个,让你摸不着头脑。
但咱不能怕呀,得有耐心,慢慢去摆弄它们。
你看,我们通过不断地计算和调整,就像在一点点拼凑一幅拼图。
每一块拼图都很重要,少了哪一块都不行。
而且啊,这个过程中还得特别小心,不能出一点差错。
就跟走钢丝似的,稍微有点偏差,可能结果就完全不一样啦!有时候你可能会觉得,哎呀,怎么这么难啊!但别灰心,这就是挑战呀。
等你真的掌握了这个算法过程,那种成就感,可别提有多棒啦!咱再想想,要是没有最小二乘法,那好多事情可都没法做啦!比如导航,要是不能准确地定位,那你不就迷路啦?还有好多需要精确位置的地方,都得靠它呢!所以说呀,别小看这个最小二乘法定位算法过程,它可厉害着呢!虽然过程可能有点复杂,有点让人头疼,但只要咱用心去学,去钻研,肯定能搞明白的。
反正我觉得吧,这就像是一场冒险,充满了未知和挑战。
但只要我们勇敢地去面对,就一定能找到那个正确的答案,找到我们想要的那个位置。
加油吧,朋友们!让我们一起在最小二乘法的世界里畅游,去探索那些神奇的奥秘!。
最小二乘法
1.什么时候用最小二乘法在研究两个变量之间的关系时,可以用回归分析的方法进行分析。
当确定了描述两个变量之间的回归模型后,就可以使用最小二乘法估计模型中的参数,进而建立经验方程.例如,在现实世界中,这样的情形大量存在着:两个变量X和Y(比如身高和体重)彼此有一些依赖关系,由X可以部分地决定Y的值,但这种关系又是不确定的.人们常常借助统计学中的回归模型来寻找两个变量之间的关系,而模型的建立当然是依据观测数据.首先通过试验或调查获得x和Y的一组对应关系(x1,Y1),(x2,Y2),…,(x n,Y n),然后回答下列5个问题:1. 这两个变量是否有关系?(画出散点图,作直观判断)2. 这些关系是否可以近似用函数模型来描述?(利用散点图、已积累的函数曲线形状的知识和试验数据,选择适当的回归模型,如一元线性模型y=b0+b1x,二次函数模型y=b0+b1x+b2x2等)3. 建立回归模型.4. 对模型中的参数进行估计,最小二乘法是这些参数的一种常用估计方法.5. 讨论模型的拟合效果.在上述第3步中,设所建立的回归模型的一般形式是,其中Y称为响应变量,x称为解释变量或协变量;是一个由参数决定的回归函数;是一个不可观测的随机误差.为了通过试验数据来估计参数的值,可以采用许多统计方法,而最小二乘法是目前最常用、最基本的.由的估计值决定的方程称为经验回归方程或经验方程.教科书中涉及的回归模型是最简单的一元线性模型Y=b0+b1x+,此时模型的拟合效果可以通过Pearson相关系数来描述。
事实上,在线性回归模型中可以证明相关指数等于相关系数的平方.2.什么是最小二乘法思想简单地说,最小二乘的思想就是要使得观测点和估计点的距离的平方和达到最小.这里的“二乘”指的是用平方来度量观测点与估计点的远近(在古汉语中“平方”称为“二乘”),“最小”指的是参数的估计值要保证各个观测点与估计点的距离的平方和达到最小.例如,对于回归模型,若,…,为收集到的观测数据,则应该用来估计,这里是的估计值。
三维定位中用最小二乘法拟合优化

三维定位中用最小二乘法拟合优化下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by the editor. I hope that after you download them, they can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!三维定位中用最小二乘法拟合优化引言随着技术的不断发展,三维定位在各种应用场景中变得越来越重要。
基于最小二乘融合估计的双星时频差定位

P NGHu- n XA C a gxog, A nkn E a eg, I h n —i f n C O —u
(otw s Eet n s n e cm u i t nT cn l yR sa hIstt, hnd 10 1C i ) Suh et l r i dT l o m n a o eho g eer tu C egu6 0 4 , hn coc peio hnte r m aue e t r r n p e e se o,aLat q ae L ) sm t nm to i r s nw e r ae esr n er dehm r l r es Su r( S et ao e di o ci h e m oa i T i i h s
基于最 小二乘融合 估计的双星时频差定位
彭华 峰, 畅雄 , 夏 曹金坤
( 西南电子电信技术研究所 , 成都 604 ) 10 1
摘 要:十 孳 对单参考站条件下具有测量误差和星历误 差时定位精度不 高的特点 , 出了一种基于多 提 次观测数据的最小二乘融合估计定位算法, 该算法无需增加观测条件即可有效提 高辐射源定位精 度 。 分析 了测 量误 差 、 星历误 差 对单参 考 站单 次定 位及 融合 定位 精度 的 影响 , 导 了测 量误 差、 推 星历
误 差对 定位 误 差的传 递公 式 , 出 了含 星 历误 差影 响 的最 小二 乘 融 合估 计 加 权 算 法。 通过 M ne 提 ot —
Cr 仿真验证 了误差分析 结果和定位算法 , 比较 了加权 最小二乘估计定位和单次定位的性 能。 ao l 并 仿 真试 验表 明 : 相 同观 测精 度条 件 下 , 权 最小二 乘 融合定 位 可极 大地提 高辐 射 源定位精 度 , 大 在 加 最 提 高 1 以上 。 O倍
基于最小二乘方法的单机测向定位算法

舰 船 电 子 对 抗
SH I PB0A RD EI ECT R0 N I C C0 U N TERM EA SU RE
Fe b .2 0 1 3
Vo l _ 3 位 算 法
中图分 类 号 : T N 9 1 1
文 献标识 码 : A
文章 编 号 : C N 3 2 — 1 4 1 3 ( 2 0 1 3 ) O 1 — 0 0 3 7 — 0 3
Al g o r i t h m o f Di r e c t i o n — f i n d i n g Lo c a t i o n o f S i ng l e Ai r pl a n e Ba s e d o n Le a s t S qu a r e M e t ho d
定 位 的原 理 , 然 后 推 导 了基 于 最 小 二 乘 方 法 的测 向交 叉 定 位 算 法 , 并通 过计 算机仿 真验证 了定位 性能 , 与 直 接 测 向
交叉定位算 法相 比, 基 于 最 小 二乘 方 法 的 测 向交 叉 定 位 算 法 提 高 了 定 位 精 度 和 算 法 稳 定性 , 具 有 很 大 的实 用 性 。 关 键词 : 测 向定 位 ; 交叉定位 ; 最t b- - 乘
何青 益, 赵 地
( 中 国 电子 科 技 集 团 公 司 5 4 所 , 石家庄 0 5 0 0 8 1 )
摘要 : 针对传统单机测 向定位算法定 位精度低 的问题 , 提出 了一 种基于 最t b ̄ -乘方 法 的单机 测 向定 位算法 , 讨论 了
单 机 测 向 交 叉 定 位 中的 若 干 问题 , 包 括 测 向定 位 原 理 和 单 机 测 向 交 叉 定 位 的 情 况 。首 先 介 绍 了 两 站 直 接 测 向交 叉
最小二乘算法
为最小,这种得到的拟合函数 ( x) 的方法,通常称为最小二乘法。多项式最小二乘法拟合 的 基 本 原 理 , 设 函 数 j ( x) x ( j 0,1,……, n) , 已 知 列 表 函 数
j
yi f ( xi ),(i 0,1,……, m) ,且 n m 。用多项式 pn ( x) 0 1 x ……+ n xn 逼近
最小二乘法在 RSSI 定位中的应用
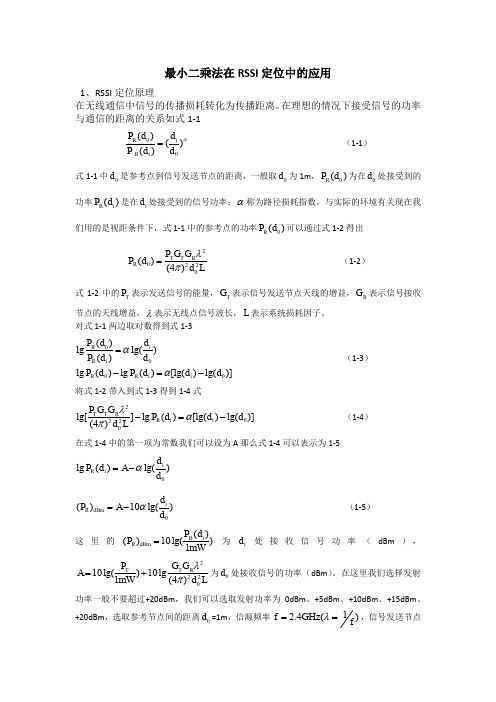
1、RSSI 定位原理 在无线通信中信号的传播损耗转化为传播距离。 在理想的情况下接受信号的功率 与通信的距离的关系如式 1-1
PR (d0 ) d ( i ) P R (di ) d 0
(1-1)
式 1-1 中 d 0 是参考点到信号发送节点的距离,一般取 d 0 为 1m, PR (d0 ) 为在 d 0 处接受到的 功率 PR (di ) 是在 d i 处接受到的信号功率; 称为路径损耗指数,与实际的环境有关现在我 们用的是视距条件下,式 1-1 中的参考点的功率 PR (d0 ) 可以通过式 1-2 得出
A ( PR )dBm 10
这里我们设 d 0 =1m 那么我们得到的 d i 为 di 10
A ( PR )dBm 10
2、最小二乘算法原理
定 义 : 设 有 函 数
1 ( x), 2 ( x),……n ( x)
线
性
无
关
,
span{1 ( x), 2 ( x), 3 ( x),……,n ( x)} ,
40
60
图一、不同的衰落系数的仿真 通过分析误差我们可以得到如图二的累计分布函数,在分布函数中我们看到误差在 1.28 米 处的概率分布是 50%,1.32 米一下的误差概率为 90%。
浅海环境下稳健的最小二乘匹配场定位算法

浅海环境下稳健的最小二乘匹配场定位算法王奇;陈航;王英民;诸国磊【摘要】The matched field processor(MFP) is prior to the nomal algorithms in the estimation of ocean environmental parameters, but the method is sensitive to the noise and the environmental mismatch, and this disadvantage hinders its application seriously.To overcome this shortcoming and improve the performance of MFP, an approach called robust matched field localization algorithm based on least squares(LSMFP) in shallow water is proposed, which decomposes the received fields in the shallow water into depth function matrixes and amplitudes of normal mode at the beginning.Then the environmental mismatch is considered as some noise, and combined with the other noise using the least squares in the sense of minimum norm, therefore the performance of MFP is improved.In the end, the vertical array data from the sea trials is used to evaluate the algorithm.The results show that the power to background ratio(PBR) of LSMFP is lager about 0.6~1.7dB than CMFP, and the localization is more accurate.%匹配场处理在海洋环境参数估计领域具有优于常规算法的性能,但其对噪声及环境扰动十分敏感,制约了该方法的应用.为了提高匹配场处理的稳健性,提出了浅海环境下稳健的最小二乘匹配场定位算法.该方法用简正波模型把浅海环境的声场分解为模态函数矩阵和模态系数向量,把环境扰动构建为模态函数的扰动,并在最小范数意义下用最小二乘算法对噪声和环境扰动进行约束,从而提高了匹配场处理的稳健性和定位性能.最后,使用海试实验数据对最小二乘匹配场处理器进行了验证.结果表明:和常规匹配场处理器相比,该算法的峰值背景比提高了约0.6~1.7 dB,而且对声源位置参数的估计更准确.【期刊名称】《西北工业大学学报》【年(卷),期】2017(035)003【总页数】6页(P480-485)【关键词】匹配场处理;约束优化;协方差矩阵;奇异值分解【作者】王奇;陈航;王英民;诸国磊【作者单位】西北工业大学航海学院, 陕西西安 710072;西北工业大学航海学院, 陕西西安 710072;西北工业大学航海学院, 陕西西安 710072;西北工业大学航海学院, 陕西西安 710072【正文语种】中文【中图分类】TB566近年来海洋环境的监测与保护越来越受到人们的重视,匹配场处理(matched field processing,MFP)作为一种新兴的海洋观测手段受到了国内外学者的广泛关注,该方法的本质是在具有环境模型的基础上仿真声场信息并与真实声场进行对比。
最小二乘算法 公式 gnss

最小二乘算法公式 gnssGNSS(全球导航卫星系统)是指由多颗卫星组成的系统,可提供全球范围内的位置、速度和时间等信息。
在GNSS中,最小二乘算法是一种常用的数据处理方法,用于提高定位精度和减小误差。
最小二乘算法是一种基于最小化残差平方和的优化方法。
在GNSS 定位中,残差是指观测值与预测值之间的差异。
最小二乘算法的目标是通过调整参数的估计值,使得残差平方和最小化。
GNSS定位过程中,需要收集卫星信号,并通过接收机进行信号处理和定位计算。
在信号处理阶段,接收机会对接收到的信号进行解调和解码,获取伪距观测值。
伪距观测值是卫星信号的传播时间与接收机的时钟偏差之间的差值。
最小二乘算法可以应用于GNSS中的多个环节,包括卫星轨道估计、接收机时钟校准、接收机位置估计等。
在卫星轨道估计中,最小二乘算法可以通过拟合观测值和预测值之间的残差,来估计卫星的轨道参数,从而提高定位的精度。
在接收机时钟校准中,最小二乘算法可以通过拟合接收机的观测值和预测值之间的残差,来校准接收机的时钟偏差,从而减小定位误差。
在接收机位置估计中,最小二乘算法可以通过拟合多个卫星的伪距观测值和接收机的位置预测值之间的残差,来估计接收机的位置坐标。
最小二乘算法的优点是简单易懂、计算效率高。
它可以通过求解线性方程组的正规方程或利用矩阵的特征值和特征向量来实现。
在实际应用中,最小二乘算法可以通过迭代求解的方式,逐步调整参数的估计值,以达到最小化残差平方和的目标。
然而,最小二乘算法也存在一些局限性。
首先,它假设观测误差是独立同分布的,且服从正态分布。
如果观测误差不满足这些假设,最小二乘算法的结果可能会偏离真实值。
其次,最小二乘算法对异常值敏感,即一个极端的观测值可能会对结果产生较大影响。
因此,在应用最小二乘算法时,需要对数据进行预处理,剔除异常值或采用鲁棒估计方法。
最小二乘算法是GNSS定位中常用的数据处理方法,通过最小化残差平方和来提高定位精度和减小误差。
精密卫星钟差解算与精密单点定位固定解方法研究
精密卫星钟差解算与精密单点定位固定解方法研究摘要:随着卫星导航系统的广泛应用,精密卫星钟差与精密单点定位固定解方法的研究越来越受到人们的关注。
本文通过分析卫星导航系统的原理和适用范围,归纳了影响卫星钟差和单点定位的误差源和影响因素,并提出了相应的解算和固定解方法。
同时,我们还通过理论推导和实验分析验证了这些方法的有效性和精度。
关键词:卫星导航系统,钟差解算,单点定位固定解,误差源,影响因素。
引言:卫星导航系统是一种利用卫星传输信号实现导航、定位、测量等功能的先进技术。
随着卫星导航技术的不断进步,卫星钟差和单点定位固定解精度的提高成为了研究的重点。
卫星钟差是卫星信号传输的时间差,其精度直接影响了导航和定位的精度。
单点定位固定解则是指根据卫星信号计算出某一位置的坐标或速度。
因此,在卫星导航应用领域中,精密卫星钟差与精密单点定位固定解方法的研究至关重要。
误差源与影响因素:卫星导航系统受到很多误差源和影响因素的影响,这些误差源和影响因素主要有以下几类:(1)大气折射误差:由于大气折射的影响,卫星信号的传输路径会发生弯曲和偏移。
(2)多径效应:卫星信号在传输过程中会发生反射和衍射,导致接收器接收到多个信号,并难以区分。
(3)接收机硬件误差:接收机硬件的制造和精度限制也会导致误差产生。
(4)卫星轨道误差:由于卫星的轨道不是完全理想的椭圆轨道,因此会产生轨道误差。
(5)信号传输延迟:由于信号传输需要时间,因此信号传输的延迟也会影响导航和定位的精度。
解算方法:卫星钟差解算是精密定位中的重要环节。
常用的卫星钟差解算方法有以下几种:(1)差分GPS实现钟差解算:差分GPS是指利用两个或多个接收机接收同一卫星信号,计算接收机之间的时差,从而校正卫星钟差误差。
(2)最小二乘法解算钟差:利用最小二乘法求解卫星钟差误差,可以减小误差和噪声的影响。
(3)多观测站共同解算钟差:利用多个观测站同时接收同一组卫星信号,根据观测数据进行共同解算,并利用结果校正卫星钟差误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
clear allclose allclcn=5; %Connect with 1,3,4T=10; %simulation timesNiter=15; %interation timesdim = 2; % Dimensionsigma=0.2;node1=[20,80]';node2=[20,70]';node3=[30,70]';node4=[20,60]';node5=[30,50]';%node2=[15,75]';%node4=[20,60]';%node = [20,90;rand(1,2);30,70;rand(1,2);30,50]; % 1,3,5 coordinate N=50 %node = [20,80;40,80;30,70;20,60]; % vague 4%z = zeros(dim,T,Niter,1);%z1 = zeros(dim,T,Niter,1);dieta_d = zeros(T,Niter); %contour z%d = zeros(dim,T,n);delat_2 = -0.25; %default delta==1%input node's coordinate%node = [20,80;1,1;30,70;1,1;30,50];z=zeros(dim,1);z1=zeros(dim,1);d12=norm((node1-node2),2);d32=norm((node3-node2),2);d42=norm((node4-node2),2);d34=norm((node3-node4),2);d54=norm((node5-node4),2);d24=norm((node2-node4),2);for test=1:100randn('state',sum(clock)*randn(1));z2(1)=d12+sigma*randn(1,1);randn('state',sum(clock)*randn(1));z2(3)=d32+sigma*randn(1,1);randn('state',sum(clock)*randn(1));z2(4)=d42+sigma*randn(1,1);randn('state',sum(clock)*randn(1));z4(3)=d34+sigma*randn(1,1);randn('state',sum(clock)*randn(1));z4(5)=d54+sigma*randn(1,1);randn('state',sum(clock)*randn(1));z4(2)=d24+sigma*randn(1,1);x1(:,1)=rand(2,1);x2(:,1)=rand(2,1);x1_temp=x1(:,1);x2_temp=x2(:,1);i=2;n=4;for t=2:T% xn(:,t,1,i)=xn(:,t-1,Niter-1,i);%xn(:,t,1,n)=xn(:,t-1,Niter-1,n);%xt(:,t-1,n);% besides Initialization, used the former product to improve the accuracyfor l=1:Niter%for j=1:5%i = 2;%if (j~=5)&&(i~=j)%e(t,l-1,j)=x(:,t,l-1,i)/norm((x(:,t,l-1,i)-x(:,t,l-1,j)),2)% Direction vectorde1=norm((x1_temp - node1),2);de2=norm((x1_temp - node3),2);de3=norm((x1_temp - x2_temp),2);%e(:,t,l-1,j) =(xn(:,t,l-1,i)-xn(:,t,l-1,j))/norm((xn(:,t,l-1,i)-xn(:,t,l-1,j)),2);if(de1==0)e1=0;elsee1 = (z2(1) - de1)*(-2)*(x1_temp - node1)/de1;endif(de2==0)e2=0;elsee2 = (z2(3) - de2)*(-2)*(x1_temp - node3)/de2;endif(de3==0)e3=0;elsee3 = (z2(4) - de3)*(-2)*(x1_temp - x2_temp)/de3;end%accumulatee=e1+e2+e3;%if (j~=1)&&(n~=j)%e(t,l-1,j)=x(:,t,l-1,i)/norm((x(:,t,l-1,i)-x(:,t,l-1,j)),2)% Direction vector% de=norm((x2_temp' - node(j,:)),2);%e(:,t,l-1,j) =(xn(:,t,l-1,i)-xn(:,t,l-1,j))/norm((xn(:,t,l-1,i)-xn(:,t,l-1,j)),2); % if(de==0)% e=0;%else% e = -2*(x2_temp(k) - node(j,k))/de;%end% end%accumulate%z1=z1+e'*(z4(j) - de);de4=norm((x2_temp - node3),2);de5=norm((x2_temp - node5),2);de6=norm((x2_temp - x1_temp),2);%e(:,t,l-1,j) =(xn(:,t,l-1,i)-xn(:,t,l-1,j))/norm((xn(:,t,l-1,i)-xn(:,t,l-1,j)),2); if(de4==0)e4=0;elsee4 = (z4(3) - de4)*(-2)*(x2_temp - node3)/de4;endif(de5==0)e5=0;elsee5 = (z4(5) - de5)*(-2)*(x2_temp - node5)/de5;endif(de6==0)e6=0;elsee6 = (z4(2) - de6)*(-2)*(x2_temp - x1_temp)/de6;end%accumulatee0=e4+e5+e6;x1(:,l) = x1_temp+delat_2*e;x2(:,l) = x2_temp+delat_2*e0;x1_temp=x1(:,l);x2_temp=x2(:,l);%if(norm((node2-xn(:,t,l,i)),2)==0)% dieta_d(t,l)=0;% else%dieta_d(t,l) = 1/((norm((node2-xn(:,t,l,i)),2))*(1.0e+14));%dieta_d(t,l)=1/(norm(node2(1)-xn(1,t,l,i))+norm(node2(2)-xn(2,t,l,i))* (1.0e+14));%if(dieta_d(t,l)>dieta_d(t,l-1))%output the max likelihood product%g=xn(:,t,l,i);% endendx1_time(:,t)=x1(:,Niter);x2_time(:,t)=x2(:,Niter);x1_temp=x1(:,Niter);x2_temp=x2(:,Niter);% xn(:,t,i) = xn(:,t,Niter-1,i);end%b=xn(:,t,l,i);x1_test(:,test)=x1_time(:,T);%x2_test(:,test)=x2_time(:,T);%h(:,test)=xn(:,T,Niter,i);end%fprintf(['y=[',num2str(dieta_d),']']);%fprintf('\n');x=x1_test;x1=node2;error_x1=x(1,:)-x1(1);error_y1=x(2,:)-x1(2);error_all=sqrt(error_x1.^2+error_y1.^2);max_error=max(error_all);min_error=min(error_all);a=0:max_error/100:max_error;for i=1:length(a)m=0;for j=1:length(error_all)if error_all(j)<=a(i)m=m+1;endendcount_error(i)=m;enderror_rate=count_error/length(error_all);plot(a,error_rate)%disp(g);%shaping%figure%[X,Y,Z]=griddata(x,y,dieta_d,linspace(0,60)',linspace(40,100),'v4'); %pcolor(X,Y,Z);shading interp%α²Êɫͼ%figure%contourf(X,Y,Z,37);%µÈ¸ßÏßͼ。