用单片机的模拟串口读取TFmini的数据
如何使用单片机模拟读写24C01EEPROM数据
voidi2c_writedata(ucharaddr,uchar*ptt)
{
uchari;
i2c_start();//产生启动信号
i2c_writebyte(0XA0);//I2C写指令和IC地址
i2c_writebyte(addr);//写EEPROM地址
for(i=0;i《8;i++,ptt++)//写8个数据
//出口参数:无
//函数作用:微妙延时
//说明:
voiddelayus(ucharTIme)
{
while(TIme--)
{
asm(“nop”);
}
}
//函数名:delayms(ucharTIme);
//入口参数:time
//出口参数:无
//函数作用:延时
//说明:
//***********************************************
如何使用单片机模拟读写24C01EEPROM数据
实验目的:
熟悉使用单片机模拟读写24C01EEPROM
1、首先向24C01EEPROM写入数据
2、在从24C01EEPROM中读取数据,并用LED显示
硬件设置:
1、SW4开关全部闭合
2、SW2开关1闭合,其它断开
3、SW3开关7和8闭合,其它断开
#include
#defineSDATRISC4
定义写入EEPROM数据
ucharcode[8]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
定义读取EEPROM数据变量
如何使用单片机的单个IO口模拟串口UART输出

IO_UART_TX_H(); } else {
IO_UART_TX_L(); asm("l.nop");//延时一个机器周期 } delay_one_bit_tx(); } IO_UART_TX_H();//发送结束位 delay_one_bit_tx(); }
1
V1.0
模拟的串口协议如下:
起始位 1 位 数据位 8 位 停止位 1 位 校验位 无
参考的代码如下:
void io_uart_send_byte(unsigned char dat) {
Unsigned char i ; IO_UART_TX_L();//拉低作为起始 delay_one_bit_tx();//按照需要的波特率来延时 for(i = 0 ; i< 8 ; i++) {
普通 MCU 模拟串口发送说明
相关说明:
(1)、模拟 115200 波特率,信号跳变的时间为 8.68uS = 1 / 115200 (2)、模拟 9600 波特率,信号跳变的时间为 104.1uS = 1 / 9600 (3)、串口的波特率越高,所需要的时间越短,相对稳定性越差,建议采用 9600 波特率。 (4)、串口的发射模拟相对比较容易,接收比较困难。下面就串口的 IO 模拟发射做说明 (5)、我们的串口允许的时钟误差最多 3%。所以用户请严格的控制时间误差在这个范围。
手把手教你写STM32bootloader(SDIO读取TF更新Bootloader)

手把手教你写STM32的bootloader(SDIO读取TF卡更新固件)作者:谭建裕1、bootloader的简介及作用什么是bootloader?本人不知道该怎么说,反正会来看这篇都是知道自己要干嘛的。
不过bootloader的作用还是要提提的,bootloader最直观的作用就方便,比如你用单片机给人家做了一款产品,后期你的产品固件需要更新的时候,你总不能带着电脑直接去客户那里拆开产品给单片机下程序吧?也不能教客户怎么给单片机下程序吧?用户体验感太差。
其实本质上bootloader的也是一个完整的程序,也有main函数,有自己的中断向量表,栈顶指针,它可以检查有没有新的固件,如果有,则将新的固件的数据写入到我们指定的flash地址中,之后跳到新的程序中去就OK了。
此时bootloader的优势就来了,bootloade更新固件有很多种方式,本人在这里只详细讲解一种,搞懂一种之后,其它的都好办,因为它们的思路都是一样的。
Bootloader 的主体原理是:首先将bin文件的数据复制到特定的地址。
然后设置中断向量表,设置MSP主堆栈指针(具体请看CM3权威指南),设置复位向量。
然后就没有然后了。
2、bootloader 涉及的知识本人在此讲解的是STM32通过读取TF 内的bin 文件数据来更新固件。
这里牵扯到STM32的SDI0外设,FATFS 文件系统,STM32的flash 读写操作。
2.1SDIOSDIO 是STM32的外设,需要注意的是只有100引脚及以上的才 有。
电路原理图如图2-1-1所示。
图2-1-1注意:在使用TF 之前必须保证TF 卡格式为FAT32,单元大小为2048。
如图2-1-2所示。
PC10 PC11 PD2" PC12 PC8 PC9T3V3图2-1-2记得在stm32f10x_it.c文件中添加中断函数。
如图2-1-3所示。
140/*Addherethe工literruptHandlerfortliEusedperiph^141/*availaloLeperipheralinterrupthandler1snameplea:142/*file(startup_stm32f'10x_xx.s).1A Q/±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±±■:144□/*145* 146* 147148149150 函数名:SDIO_IRQ:EiBIlGllE工描述:在SDlO_lTConfig()这个函数开启了sdio中断,数据传输结東时产主中断输入:无输出:无151^include1T sd.iosdcard.h,T 152void SDIO_IRQHandler(void) 153E]{154 155 156L}/*ProcessAllSDIO:Eiiterrupt SD_ProcessIRQSrc();Sources图2-1-32.2FATFS文件系统移植和使用文件系统使用的是FATFS9,源码在压缩包的ff9文件夹,如图2-2-1所示。
stm32f103c8t6 tf卡简单的读写函数
stm32f103c8t6 tf卡简单的读写函数STM32F103C8T6是一款常用的微控制器,它内部集成了SDIO接口,可以方便地与TF卡进行数据读写。
在本文中,我将介绍一些简单的读写函数,以帮助您在STM32F103C8T6上使用TF卡。
下面是相关内容:一、TF卡介绍TF卡(T-Flash卡)是一种袖珍型存储卡,广泛应用于移动设备中。
它的体积小、价格低廉,并且容量可扩展。
在STM32F103C8T6上使用TF卡,可以实现大量数据存储,方便后续的读写操作。
二、初始化函数在使用TF卡之前,我们需要进行初始化操作。
以下是一个简单的TF卡初始化函数示例:```c#include "stm32f10x.h"void TF_Card_Init(){// 初始化SPI接口RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1, ENABLE);SPI_InitTypeDef SPI_InitStructure;SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;SPI_InitStructure.SPI_Mode = SPI_Mode_Master;SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;// 更多SPI参数配置,如速率、时钟极性等// ...SPI_Init(SPI1, &SPI_InitStructure);SPI_Cmd(SPI1, ENABLE);// 等待TF卡初始化完成while(TF_Card_SendCommand(CMD0, 0) != 0x01);}```该函数使用了STM32F10x库,通过SPI1接口与TF卡进行通信。
在实际使用中,您需要根据TF卡的具体规格进行参数的设置和修改。
三、读取函数TF卡的读取操作可以通过发送命令和读取数据实现。
ATmega128L单片机的MicroSD卡读写
T ECH N OLOGYRE VI E W技术纵横ATmega128L单片机的Micro SD卡读写u西安工程大学朱大锐张团善高文摘要针对电脑横机控制系统对花型文件数据存储的要求,在ATmega128L单片机基础上采用Micro SD卡实现嵌入式文件系统。
文章介绍了Micro SD卡的特点、FAT文件系统、SPI模式协议以及硬件接口的实现。
通过ATmega128L的SPI模式与Micro SD卡进行同步数据传输,实现Micro SD卡的读写,以FAT32文件格式建立相应的文件系统,把数据以文件方式写入Micro SD卡。
通过单片机向Micro SD卡发送读写扇区命令,完成文件的创建、打开、读写、删除等操作。
关键词ATmega128L Micro SD卡串行外设协议文件分配表引言随着工业控制系统功能的增强,系统对于存储介质的安全、容量、性能的要求越来越高。
Micro SD卡是在SD卡和Mini SD卡基础上发展起来的一种多功能存储卡,具备串行和随机存取能力,可以通过专用优化速度的串行接口访问,数据传输可靠,安全性好,传输速度快,存储容量大,体积小,被列为目前全球最小的迷你存储卡。
Micro SD卡支持SD模式和SPI模式。
随着高性能单片机的性能不断提高,利用高性能、低功耗的AVR8位ATmega128L单片机的串行外设接口SPI与Micro SD卡之间进行高速同步数据传输,设计开发了一种嵌入式文件系统。
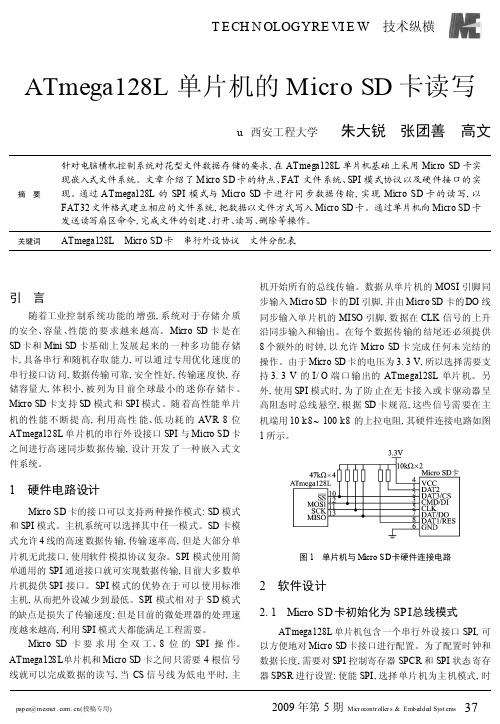
1硬件电路设计Micro SD卡的接口可以支持两种操作模式:SD模式和SPI模式。
主机系统可以选择其中任一模式。
SD卡模式允许4线的高速数据传输,传输速率高,但是大部分单片机无此接口,使用软件模拟协议复杂。
SPI模式使用简单通用的SPI通道接口就可实现数据传输,目前大多数单片机提供SPI接口。
SPI模式的优势在于可以使用标准主机,从而把外设减少到最低。
SPI模式相对于SD模式的缺点是损失了传输速度;但是目前的微处理器的处理速度越来越高,利用SPI模式大都能满足工程需要。
单片机MicroSD以及TFT液晶显示实验报告
实验九MicroSD卡操作实验程序流程:时钟初始化-->SSI初始化-->液晶初始化-->UART初始化--> 接收UART命令help,cat,ls等-->处理命令(nStatus = CmdLineProcess(g_cCmdBuf);)-->判断nStatus是否为0,如果为0正常运行程序输出结果并重新接收命令,否则的话输出相应的错误提示并重新接收命令。
总的来说,我们在串口调试软件发送窗口输入一个命令后点击发送到单片机,单片机开始处理命令,并把结果通过端口发送到软件的接收数据窗口。
程序注释(按住ctrl点击这里到实验十):uint32_t g_ui32SysClock;#define PATH_BUF_SIZE 80 //定义缓冲区大小,用来保存路径#define CMD_BUF_SIZE 64 //定义命令行的缓冲区大小static char g_cCwdBuf[PATH_BUF_SIZE] = "/"; //这个缓冲区保存当前工作目录的完整路径static char g_cTmpBuf[PATH_BUF_SIZE]; //一个临时数据缓冲区操作文件路径时使用,或从SD卡读取数据static char g_cCmdBuf[CMD_BUF_SIZE]; //一个缓冲区用来保存命令行static FATFS g_sFatFs;static DIR g_sDirObject;static FILINFO g_sFileInfo;static FIL g_sFileObject;typedef struct{FRESULT fresult;char *pcResultStr;}tFresultString;#define FRESULT_ENTRY(f) { (f), (#f) }//用于查找错误代码并打印tFresultString g_sFresultStrings[] ={FRESULT_ENTRY(FR_OK),FRESULT_ENTRY(FR_DISK_ERR),FRESULT_ENTRY(FR_INT_ERR),FRESULT_ENTRY(FR_NOT_READY),FRESULT_ENTRY(FR_NO_FILE),FRESULT_ENTRY(FR_NO_PATH),FRESULT_ENTRY(FR_INVALID_NAME),FRESULT_ENTRY(FR_DENIED),FRESULT_ENTRY(FR_EXIST),FRESULT_ENTRY(FR_INVALID_OBJECT),FRESULT_ENTRY(FR_WRITE_PROTECTED),FRESULT_ENTRY(FR_INVALID_DRIVE),FRESULT_ENTRY(FR_NOT_ENABLED),FRESULT_ENTRY(FR_NO_FILESYSTEM),FRESULT_ENTRY(FR_MKFS_ABORTED),FRESULT_ENTRY(FR_TIMEOUT),FRESULT_ENTRY(FR_LOCKED),FRESULT_ENTRY(FR_NOT_ENOUGH_CORE),FRESULT_ENTRY(FR_TOO_MANY_OPEN_FILES),FRESULT_ENTRY(FR_INVALID_PARAMETER)};#define NUM_FRESULT_CODES (sizeof(g_sFresultStrings) / sizeof(tFresultString)) tContext g_sContext;//返回一个错误代码的字符串const char *StringFromFresult(FRESULT fresult){unsigned int uIdx;//进入一个循环从错误代码表中搜索匹配错误代码for(uIdx = 0; uIdx < NUM_FRESULT_CODES; uIdx++){//如果找到匹配项,则返回错误代码的字符串名称if(g_sFresultStrings[uIdx].fresult == fresult){return(g_sFresultStrings[uIdx].pcResultStr);}}//如果没有找到匹配的代码,则返回“UNKNOW ERROR CODE”return("UNKNOWN ERROR CODE");}voidSysTickHandler(void){disk_timerproc();}//这个函数实现了“ls”命令。
单片机获取传感器数据的方法
单片机获取传感器数据的方法
首先,我们来谈谈模拟输入。
许多传感器输出的是模拟信号,比如电压或电流。
单片机可以通过模数转换器(ADC)将这些模拟信号转换为数字信号。
单片机内置的ADC可以直接将模拟信号转换为数字信号,然后可以通过单片机的输入端口读取这些数字信号。
这种方法适用于许多传感器,比如温度传感器、光敏电阻、压力传感器等。
其次,数字输入也是获取传感器数据的常见方法。
一些传感器本身就是数字传感器,它们直接输出数字信号。
单片机可以通过数字输入端口直接读取这些数字信号。
例如,许多数字温度传感器、数字湿度传感器、红外传感器等都可以直接输出数字信号,单片机可以直接读取这些信号并进行处理。
除了以上两种方法,还有一些特殊的接口和协议可以用于获取传感器数据,比如I2C、SPI、UART等串行通信协议。
许多传感器模块都支持这些通信协议,单片机可以通过这些接口与传感器模块进行通信,获取传感器数据。
总的来说,单片机获取传感器数据的方法多种多样,可以根据
具体的传感器类型和单片机的接口特点选择合适的方法。
在实际应用中,需要根据具体的情况选择最合适的方法来获取传感器数据,以确保数据的准确性和稳定性。
52- STM32F4 STM32 通过网口 读取 SD卡 TF卡 文件 内容

一、功能说明本例程的功能当在浏览器中输入预先设置好的静态IP:192.168.0.120时,控制网页界面将打开,可以分别控制STM32F4 Discovery板子上四颗不同颜色的LED灯,可以触发、打开、关闭共3种控制功能,点击对应功能时,除了LED状态改变之外,还会打开存储在TF中的wwwindex.html文件,同时串口会打印一些列的提示。
二、软件修改本例程软件层面无需修改,如果fatfs要支持长文件名,并且支持中文,需要参考例程说明《29-fatfs 011a版本长文件名支持U盘TF SD卡基于STM32F4单片机》配置。
三、硬件连接将串口连接到4PIN的串口座,网线连接到路由器,TF中放入对应的“wwwindex.html”文件。
需要注意的是,如果路由器的网关的192.168.1.1,则IP需要改为192.168.1.120,确保前三段IP地址和网关一致。
关于例程的其他信息如有问题,请发我QQ邮件:3199212692@例程对象:STM32F407单片机,fatfs R0.11a版本项目的工程文件在百度云盘上:/s/1qYgr2LAQuevoice扩展板资料在百度云盘上:/s/1eSBedbW例程中的开发套件在我的个人网店上:https:///shop/view_shop.htm?tracelog=twddp&user_number_id=29 52611999GitHub关于STM32F4 Discovery的开源工程GitHub开源工程介绍链接:/2014/05/all-stm32f429-libraries-at-one-place/GitHub开源工程文件链接:https:///MaJerle/stm32f429。
单片机串口识别数据的方法

单片机串口识别数据的方法
单片机串口识别数据的方法通常涉及到以下几个步骤:
1. 初始化串口:在开始接收数据之前,需要初始化串口。
这包括设置波特率、数据位、停止位和奇偶校验等参数。
2. 检测起始位:串口通信通常以一个起始位开始,这是数据传输的标志。
单片机需要检测到这个起始位,然后开始接收数据。
3. 接收数据:一旦检测到起始位,单片机就可以开始接收数据。
这通常是通过一个循环实现的,循环中不断地从串口读取数据,直到接收到所有的数据位。
4. 处理数据:在接收到数据后,单片机需要对数据进行处理。
这可能涉及到将数据解析为特定的命令或消息,或者将数据存储在内存中。
5. 检测停止位:数据接收完成后,单片机需要检测到一个停止位,这标志着数据传输的结束。
6. 错误处理:如果在接收过程中检测到任何错误(例如,数据位不正确,或者没有检测到起始位或停止位),单片机需要进行适当的错误处理。
以上就是单片机串口识别数据的基本方法。
具体的实现可能会根据单片机的型号和使用的串口通信协议有所不同。
51单片机模拟串口的三种方法

随着单片机的使用日益频繁,用其作前置机进行采集和通信也常见于各种应用,一般是利用前置机采集各种终端数据后进行处理、存储,再主动或被动上报给管理站。
这种情况下下,采集会需要一个串口,上报又需要另一个串口,这就要求单片机具有双串口的功能,但我们知道一般的51系列只提供一个串口,那么另一个串口只能靠程序模拟。
本文所说的模拟串口,就是利用51的两个输入输出引脚如P1.0和P1.1,置1或0分别代表高低电平,也就是串口通信中所说的位,如起始位用低电平,则将其置0,停止位为高电平,则将其置1,各种数据位和校验位则根据情况置1或置0。
至于串口通信的波特率,说到底只是每位电平持续的时间,波特率越高,持续的时间越短。
如波特率为9600BPS,即每一位传送时间为1000ms/9600=0.104ms,即位与位之间的延时为为0.104毫秒。
单片机的延时是通过执行若干条指令来达到目的的,因为每条指令为1-3个指令周期,可即是通过若干个指令周期来进行延时的,单片机常用11.0592M的的晶振,现在我要告诉你这个奇怪数字的来历。
用此频率则每个指令周期的时间为(12/11.0592)us,那么波特率为9600BPS每位要间融多少个指令周期呢?指令周期s=(1000000/9600)/(12/11.0592)=96,刚好为一整数,如果为4800BPS则为96x2=192,如为19200BPS则为48,别的波特率就不算了,都刚好为整数个指令周期,妙吧。
至于别的晶振频率大家自已去算吧。
现在就以11.0592M的晶振为例,谈谈三种模拟串口的方法。
方法一:延时法通过上述计算大家知道,串口的每位需延时0.104秒,中间可执行96个指令周期。
#define uchar unsigned charsbit P1_0 = 0x90;sbit P1_1 = 0x91;sbit P1_2 = 0x92;#define RXD P1_0#define TXD P1_1#define WRDYN 44 //写延时#define RDDYN 43 //读延时//往串口写一个字节void WByte(uchar input){uchar i=8;TXD=(bit)0; //发送启始位Delay2cp(39);//发送8位数据位while(i--){TXD=(bit)(input&0x01); //先传低位Delay2cp(36);input=input>>1;}//发送校验位(无)TXD=(bit)1; //发送结束位Delay2cp(46);}//从串口读一个字节uchar RByte(void){uchar Output=0;uchar i=8;uchar temp=RDDYN;//发送8位数据位Delay2cp(RDDYN*1.5); //此处注意,等过起始位while(i--){Output >>=1;if(RXD) Output |=0x80; //先收低位Delay2cp(35); //(96-26)/2,循环共占用26个指令周期}while(--temp) //在指定的时间内搜寻结束位。
单片机 串口发送数据返回一样的数据

单片机串口发送数据返回一样的数据英文版Single-Chip Microcontroller: Serial Transmission of Data with Identical ReturnIn the realm of embedded systems, the single-chip microcontroller plays a pivotal role due to its compactness, efficiency, and cost-effectiveness. Among its many functionalities, one common task is to transmit data through the serial port and receive identical data in response. This article delves into the process of achieving this task.SetupTo begin, we need a suitable microcontroller, such as the popular Arduino, and a programming environment like the Arduino IDE. The microcontroller must have a functional serial communication interface.ProgrammingProgramming the microcontroller involves writing code that will handle the serial transmission and reception. Here's a simplified example using the Arduino language:cppCopy void setup() {// Initialize serial communication at a baud rate of 9600 bpsSerial.begin(9600);}void loop() {// Check if there is data available in the serial bufferif (Serial.available() > 0) {// Read the incoming datachar incomingData = Serial.read();// Echo the same data back through the serial portSerial.write(incomingData);}}void setup() {// Initialize serial communication at a baud rate of 9600 bpsSerial.begin(9600);}void loop() {// Check if there is data available in the serial bufferif (Serial.available() > 0) {// Read the incoming datachar incomingData = Serial.read();// Echo the same data back through the serial portSerial.write(incomingData);}}In this code, the setup() function initializes the serial communication at a baud rate of 9600 bits per second (bps). The loop() function continuously checks if there is any data available in the serial buffer. If there is, it reads the incomingdata and immediately sends it back through the serial port using Serial.write().TestingTo test this setup, you would need a serial communication tool like the Serial Monitor in the Arduino IDE or any other third-party software. By sending data to the microcontroller through the serial port, you should see the exact same data being returned.ApplicationsThis simple data transmission and reception mechanism finds applications in various fields like robotics, automation, and even some consumer electronics where a device needs to acknowledge a received command or data.ConclusionThe single-chip microcontroller, with its inherent capabilities, can effortlessly handle serial data transmission and reception, making it a vital component in modern electronic systems. Byprogramming it to send back identical data, we can implement simple yet effective communication protocols.中文版单片机:串口发送数据并返回相同数据在嵌入式系统中,单片机由于其紧凑性、高效性和成本效益,扮演着至关重要的角色。
单片机远程监测系统中数据的采集与传输
单片机远程监测系统中数据的采集与传输随着科技的不断发展,单片机远程监测系统在各个领域中扮演着重要角色。
在这个系统中,数据的采集与传输是至关重要的一部分。
本文将着重探讨单片机远程监测系统中数据的采集与传输技术及其应用。
一、数据的采集数据的采集是单片机远程监测系统的关键环节之一。
在采集过程中,我们需要收集各个传感器的数据,并将其转化为数字信号,以便进行后续处理和传输。
下面将介绍几种常见的数据采集方法:1. 模拟信号采集:单片机通过模拟转数字转换器(ADC)将传感器输出的模拟信号转化为数字信号。
ADC将模拟信号分成多个离散的采样点,然后将其转化为数字形式进行存储和处理。
2. 数字信号采集:有些传感器输出的已经是数字信号,无需进行模拟信号转换。
此时,单片机可以直接采集数字信号并进行存储和处理。
3. 串行接口采集:单片机可以通过串行接口(例如UART、SPI、I2C等)与传感器进行通信,直接接收传感器发送的数据。
这种方式通常用于短距离的数据采集,例如传感器与单片机在同一个电路板上。
4. 无线传感器网络采集:在一些需要远距离、分布式采集的场景中,可以使用无线传感器网络(WSN)来采集数据。
每个传感器节点具备采集和传输功能,可以互相协作完成数据采集和传输任务。
二、数据的传输数据的传输是单片机远程监测系统与外界进行通信的关键环节。
在传输过程中,我们需要选择合适的传输方式,并保证数据传输的可靠性和实时性。
下面将介绍几种常见的数据传输方法:1. 有线传输:有线传输是一种稳定可靠的传输方式。
可以通过串口、以太网等有线连接方式将数据传输到远程服务器或计算机中。
这种传输方式适用于距离近、带宽要求较高的场景。
2. 无线传输:无线传输是一种灵活便捷的传输方式。
可以使用蓝牙、Wi-Fi、LoRa等无线通信技术将数据传输到远程服务器或云平台上。
这种传输方式适用于距离远、无线信号覆盖较好的场景。
3. 短信传输:在一些远程地区或没有互联网接入的场景中,可以使用短信(SMS)传输数据。
单片机虚拟串口的使用方法
单片机虚拟串口的使用方法单片机的虚拟串口是一种非常常见的通信方式,它利用串口模拟的方式来进行数据的传输。
虚拟串口能够让单片机和计算机之间实现数据的传输和通讯,从而方便了开发者的开发工作,更好地实现了单片机与计算机的互联互通。
虚拟串口的使用方法如下:1. 确定虚拟串口的通信参数在使用虚拟串口前,首先要确认好虚拟串口的通信参数。
一般来说,包括波特率、数据位、停止位、奇偶校验等参数。
这些参数需要与单片机的串口通信参数相对应,否则通信将会失败。
2. 安装虚拟串口驱动程序在计算机上进行单片机项目的开发时,需要先安装对应的虚拟串口驱动程序。
常用的虚拟串口驱动程序有VirtualSerialDriver、FTDI等。
在安装驱动程序时,需要根据计算机的操作系统版本,选择对应的驱动程序版本。
3. 编写单片机程序在单片机中涉及到虚拟串口的程序中,需要先初始化串口通信参数,并打开串口,然后循环等待从串口接收到的数据。
在循环中,可以使用串口发送数据给计算机,或者从计算机接收数据。
4. 在计算机上打开虚拟串口设备在单片机程序中设置好虚拟串口的通信参数后,需要在计算机上打开虚拟串口设备。
在计算机的设备管理器中,能够看到已经成功安装的虚拟串口设备。
打开对应的串口,设置对应的通信参数即可。
5. 测试通信在单片机和计算机之间建立虚拟串口连接后,需要进行测试,确保串口通信正常。
可以先从单片机发送数据给计算机,观察是否能够在计算机上接收到数据;然后,可以在计算机上发送数据给单片机,观察单片机是否能够接收到数据。
如果测试结果正确,就可以通过这个虚拟串口通讯了。
总的来说,单片机虚拟串口的使用是比较简单的,只需设置好通信参数,安装对应的驱动程序,然后编写好单片机程序,最后进行测试即可。
虚拟串口通信的优点是方便快捷,能够更好地连接单片机与计算机,方便数据传输和控制。
因此,在实际应用中,虚拟串口通信被广泛应用于各种单片机项目开发中。
基于单片机和串口的SD卡读取平台的设计
基于单片机和串口的SD卡读取平台的设计刘润【摘要】随着现代电子技术的发展,各种存储设备的应用越来越广泛.其中以SD存储卡的应用最为广泛,但是由于在传统的底层硬件体系结构中,一个接口只能连接同种设备,这其实是对现有的资源的浪费.在此提出一种通过AVR单片机和串行转USB接口来读取SD卡中数据的方案,真正做到了通过单片机和计算机对各种外设的双向读取,通过常规文件系统的读取方式的改进,能够兼容各种外部设备使其便携性进一步增强,进一步提高了已有资源的利用率,能通过单片机和计算机对存储信息进行有效的管理.实验证明单次读取成功率能达到99.8%,因此在数据读取的稳定性和安全性上是有保障的.本设计具有一定的社会价值和经济价值.【期刊名称】《现代电子技术》【年(卷),期】2010(033)016【总页数】3页(P166-168)【关键词】串口;SD卡;单片机;USB接口【作者】刘润【作者单位】青海师范大学物理系,青海,西宁,810008【正文语种】中文【中图分类】TN911-340 引言SD卡[1](secure digital memory card,安全数码卡)是一种基于半导体快闪记忆器的新一代记忆设备,它被广泛地于便携式装置上使用,例如数码相机、个人数码助理(PDA)和多媒体播放器等。
SD卡由日本松下、东芝及美国SanDisk公司于1999年8月共同开发研制。
大小犹如一张邮票的SD记忆卡,重量只有2 g,但却拥有高记忆容量、快速数据传输率、极大的移动灵活性以及很好的安全性。
本文正是通过AVR单片机经过软硬结合的设计方案,来读取SD卡上FAT32文件系统中的数据,FAT32是微软公司开发的新一代的文件系统,支持更大的存储容量和长达255个字符的文件名,也可以通过串口转USB接口芯片通过计算机来访问存储器中的数据,从而实现多渠道的立体的访问方式,进一步提升了资源的利用率。
1 文件系统1.1 FAT文件系统简介文件配置表(FAT)[2]是一种由微软公司发明的并带有部分专利的文件系统,供MS-DOS使用,也是非NT内核的微软窗口使用的文件系统。
模拟串口的三种方法及C语言
51单片机模拟串口的三种方法[ 2007-8-2 9:50:00 | By: MCUBLOG ](转)随着单片机的使用日益频繁,用其作前置机进行采集和通信也常见于各种应用,一般是利用前置机采集各种终端数据后进行处理、存储,再主动或被动上报给管理站。
这种情况下下,采集会需要一个串口,上报又需要另一个串口,这就要求单片机具有双串口的功能,但我们知道一般的51系列只提供一个串口,那么另一个串口只能靠程序模拟。
本文所说的模拟串口,就是利用51的两个输入输出引脚如P1.0和P1.1,置1或0分别代表高低电平,也就是串口通信中所说的位,如起始位用低电平,则将其置0,停止位为高电平,则将其置1,各种数据位和校验位则根据情况置1或置0。
至于串口通信的波特率,说到底只是每位电平持续的时间,波特率越高,持续的时间越短。
如波特率为9600BPS,即每一位传送时间为1000ms/9600=0.104ms,即位与位之间的延时为为0.104毫秒。
单片机的延时是通过执行若干条指令来达到目的的,因为每条指令为1-3个指令周期,可即是通过若干个指令周期来进行延时的,单片机常用11.0592M的的晶振,现在我要告诉你这个奇怪数字的来历。
用此频率则每个指令周期的时间为(12/11.0592)us,那么波特率为9600BPS每位要间融多少个指令周期呢?指令周期s=(1000000/9600)/(12/11.0592)=96,刚好为一整数,如果为4800BPS则为96x2=192,如为19200BPS则为48,别的波特率就不算了,都刚好为整数个指令周期,妙吧。
至于别的晶振频率大家自已去算吧。
现在就以11.0592M的晶振为例,谈谈三种模拟串口的方法。
方法一:延时法通过上述计算大家知道,串口的每位需延时0.104秒,中间可执行96个指令周期。
#define uchar unsigned charsbit P1_0 = 0x90;sbit P1_1 = 0x91;sbit P1_2 = 0x92;#define RXD P1_0#define TXD P1_1#define WRDYN 44 //写延时#define RDDYN 43 //读延时//往串口写一个字节void WByte(uchar input){uchar i=8;TXD=(bit)0; //发送启始位Delay2cp(39);//发送8位数据位while(i--){TXD=(bit)(input&0x01); //先传低位Delay2cp(36);input=input>>1;}//发送校验位(无)TXD=(bit)1; //发送结束位Delay2cp(46);}//从串口读一个字节uchar RByte(void){uchar Output=0;uchar i=8;uchar temp=RDDYN;//发送8位数据位Delay2cp(RDDYN*1.5); //此处注意,等过起始位while(i--){Output >>=1;if(RXD) Output |=0x80; //先收低位Delay2cp(35); //(96-26)/2,循环共占用26个指令周期}while(--temp) //在指定的时间内搜寻结束位。
单片机模拟IC总线及CICEEPROM读写实例

单片机模拟IC总线及C(IC EEPROM)读写实例单片机模拟I2C总线及24C02(I2C EEPROM)读写实例(源代码)浏览选项:大中小颜色默认灰度橄榄色绿色蓝色褐色红色/* 51系列单片机在使用时,有时需要模拟I2C总线,*/ /* 这里举出一个实例(读写串行EEPROM芯片at2402)*/ /************************************************************************//* Name:AT24C02存储器的读写程序,用到I2C总线,含相对独立的I2C总线读写函数*/ /* Language: C51单片机编程语言*//* Platform: Win98,Intel Celeron 433 Processor,伟福仿真器,仿真8751 *//* Author: StephenZhu javasdk@ *//* Date: 2003年5月21日,5月22日,5月29日*/ /* Version: 1.1.1 *//* Others: None *//************************************************************************/#include<string.h>#include<reg52.h>#include<intrins.h>#define DELAY_TIME 60 /*经实验,不要小于50!否则可能造成时序混乱*/#define TRUE 1#define FALSE 0sbit SCL=P1^7;/*假设由P1.7和P1.6控制*/sbit SDA=P1^6;/********** Function Definition函数定义************/void DELAY(unsigned int t) /*延时函数*/{while(t!=0)t--;}void I2C_Start(void){/*启动I2C总线的函数,当SCL为高电平时使SDA产生一个负跳变*/ SDA=1;SCL=1;DELAY(DELAY_TIME);SDA=0;DELAY(DELAY_TIME);SCL=0;DELAY(DELAY_TIME);}void I2C_Stop(void){/*终止I2C总线,当SCL为高电平时使SDA产生一个正跳变*/SDA=0;SCL=1;DELAY(DELAY_TIME);SDA=1;DELAY(DELAY_TIME);SCL=0;DELAY(DELAY_TIME);}void SEND_0(void) /* SEND ACK */{/*发送0,在SCL为高电平时使SDA信号为低*/SDA=0;SCL=1;DELAY(DELAY_TIME);SCL=0;DELAY(DELAY_TIME);}void SEND_1(void){/*发送1,在SCL为高电平时使SDA信号为高*/SDA=1;SCL=1;DELAY(DELAY_TIME);SCL=0;DELAY(DELAY_TIME);}bit Check_Acknowledge(void){/*发送完一个字节后检验设备的应答信号*/ SDA=1;SCL=1;DELAY(DELAY_TIME/2);F0=SDA;DELAY(DELAY_TIME/2);SCL=0;DELAY(DELAY_TIME);if(F0==1)return FALSE;return TRUE;}void WriteI2CByte(char b)reentrant{/*向I2C总线写一个字节*/char i;for(i=0;i<8;i++)if((b<<i)&0x80)SEND_1();elseSEND_0();}char ReadI2CByte(void)reentrant{/*从I2C总线读一个字节*/char b=0,i;for(i=0;i<8;i++){SDA=1; /*释放总线*/SCL=1; /*接受数据*/DELAY(10);F0=SDA;DELAY(10);SCL=0;if(F0==1){b=b<<1;b=b|0x01;}elseb=b<<1;}return b;}/**********以下为读写24c02的函数**********/ void Write_One_Byte(char addr,char thedata){bit acktemp=1;/*write a byte to mem*/I2C_Start();WriteI2CByte(0xa0);acktemp=Check_Acknowledge();WriteI2CByte(addr);/*address*/acktemp=Check_Acknowledge();WriteI2CByte(thedata);/*thedata*/acktemp=Check_Acknowledge();I2C_Stop();}void Write_A_Page(char *buffer,char addr){bit acktemp=1;bit wrtmp;int i;/*write a page to at24c02*/I2C_Start();WriteI2CByte(0xa0);acktemp=Check_Acknowledge();WriteI2CByte(addr);/*address*/acktemp=Check_Acknowledge();for(i=0;i<7;i++){WriteI2CByte(buffer[i]);if(!Check_Acknowledge()){I2C_Stop();}}I2C_Stop();}char Read_One_Byte(char addr){ bit acktemp=1;char mydata;/*read a byte from mem*/I2C_Start();WriteI2CByte(0xa0);acktemp=Check_Acknowledge();WriteI2CByte(addr);/*address*/acktemp=Check_Acknowledge();I2C_Start();WriteI2CByte(0xa1);acktemp=Check_Acknowledge();mydata=ReadI2CByte();acktemp=Check_Acknowledge();return mydata;I2C_Stop();}void Read_N_Bytes(char *buffer,char n,char addr) {bit acktemp=1;int i=0;/*read 8 bytes from mem*/I2C_Start();WriteI2CByte(0xa0);acktemp=Check_Acknowledge();WriteI2CByte(addr);/*address*/acktemp=Check_Acknowledge();I2C_Start();WriteI2CByte(0xa1);acktemp=Check_Acknowledge();for(i=0;i<n;i++){buffer[i]=ReadI2CByte();if(i!=n-1)SEND_0(); /*发送应答*/ elseSEND_1(); /*发送非应答*/ }I2C_Stop();}void main(){int i;char mybyte;char myarray[8];char myarray2[8];char rdarray[16];for(i=0;i<8;i++){myarray[i]=i;myarray2[i]=i+0x08;}Write_One_Byte(0x20,0x28);Write_A_Page(myarray,0x10); Write_A_Page(myarray2,0x18);mybyte=Read_One_Byte(0x20); Read_N_Bytes(rdarray,16,0x10);}。
STM32的IO口模拟UART接收数据
STM32的IO口模拟UART接收数据/**********用普通I/O模拟串口接收************///*******波特率为9600,传输一位大约就是104us,1个起始位,8个数据位,1个停止位,总共10位************* ///******空闲状态为高电平,起始位来临时,用下降沿来触发外部中断,延时50us(至一个位传输时间的中间)**********///然后关闭外部中断,开启定时器中断,定时器延时104us,读取IO口的值,读取9次,然后判断第9位是不是高电平,如果是,则认为接收完成,然后保存数据#include "i_o_usart.h"#include "delay.h"u16 Rx_9Bit = 0x0000; //接收8位数据和1位停止位u8 Rx_Byte; //接收到的一个字节u8 Rx_Cmd[16]; //接收数组u8 cnt; //接收位数统计void GPIO_INIT(void){GPIO_InitTypeDef GPIO_InitStructure;EXTI_InitTypeDef EXTI_InitStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABL E);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = USART_Rx_Pin;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);EXTI_InitStructure.EXTI_Line = EXTI_Line12;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;EXTI_Init(&EXTI_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);}void TIM2_INIT(void){NVIC_InitTypeDef NVIC_InitStructure;TIM_TimeBaseInitTypeDef TIM_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);TIM_InitStructure.TIM_ClockDivision = TIM_CKD_DIV1;TIM_InitStructure.TIM_CounterMode = TIM_CounterMode_Up;TIM_InitStructure.TIM_Period = 5;TIM_InitStructure.TIM_Prescaler = 1247;TIM_InitStructure.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM2,&TIM_InitStructure);TIM_ClearITPendingBit(TIM2,TIM_IT_Update); //此句需在TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);之前,否则初始化后,会进入TIM2中断TIM_ITConfig(TIM2,TIM_IT_Update,ENABLE);TIM_Cmd(TIM2,DISABLE);NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);}void EXTI15_10_IRQHandler(void){delayus(49);if(USART_Rx_Data == 0){EXTI->IMR = 0x00000000;//关外部中断EXTI_ClearITPendingBit(EXTI_Line12);TIM_Cmd(TIM2,ENABLE);}}void TIM2_IRQHandler(void){if(TIM_GetITStatus(TIM2,TIM_IT_Update) != RESET){TIM_ClearITPendingBit(TIM2,TIM_IT_Update);if(USART_Rx_Data == 1) //USART_Rx_Data是引脚USART_Rx_Pin的值{Rx_9Bit |= 0x0200;}Rx_9Bit >>= 1;cnt += 1;if(cnt == 9){if(Rx_9Bit & 0x0100){Rx_Byte = (u8)(Rx_9Bit & 0x00FF);}Rx_9Bit = 0x0000;TIM_Cmd(TIM2,DISABLE); //关定时器EXTI->IMR = 0x00001000; //开启外部中断cnt = 0;}else{TIM2->CR1 |= 0x01;}}}。
单片机 接收长整数
单片机接收长整数
在单片机中,可以通过不同的方式接收长整数。
1. 使用串口通信: 单片机可以通过串口通信接收长整数。
首先,需要将长整数转换成字符串或者字符数组,然后将其逐个字节地通过
串口发送给单片机。
单片机接收到数据后,将其转换回长整数进行处理。
2. 使用外部存储器: 如果长整数较大,可以考虑使用外部存储
器如EEPROM或SD卡来接收长整数。
首先,将长整数存储在外部存储
器中,在单片机中通过相应的通信协议(如SPI或I2C)读取外部存储器中的数据,并将其转换为长整数进行处理。
3. 使用ADC模块: 如果长整数是通过模拟信号传输的,可以通
过模拟输入通道和ADC模块将模拟信号转换为数字信号,并在单片机
中进行处理。
需要注意的是,针对不同的单片机和开发平台,具体的接收长整
数的方法和代码可能会有所不同。
可以查阅相关的单片机资料和文档,了解具体实现方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用单片机的模拟串口读取TFmini的数据朱铮南STC15W104单片机只有8个针脚,刚好满足读取激光测距模块TFmini的数据并用74HC595驱动的四位数码管显示所需要的针脚。
遗憾的是STC15W104不具有串口功能,只能用普通针脚来模拟串口。
本文代码里的“读1帧函数”就是模拟串口。
激光测距模块TFmini输出的串口信号的波特率是115200,起始位和结束位各占1位,数据占8位,可以算出传输一位数据的时长是1000000us/115200=8.68us。
本例中的模拟串口采用了代码延时和定时器溢出中断相结合的方法,起始位开始后用代码延时3us再启动定时器,定时器溢出中断产生8.68us的时间间隔用来读取每一位的数据。
定时器的初始化代码放在主函数一开头的地方。
实践证明这个模拟串口工作非常稳定。
完整的代码如下。
/********************************************************************STC15W104模拟串口读TFmini,74HC595驱动数码管显示。
朱铮南编写*******************************************************************/#include <STC15W.h>#define uint unsigned int#define uchar unsigned charsbit DIO=P3^4; //串行数据输入sbit RK=P3^2; //时钟脉冲信号——上升沿有效sbit SK=P3^3; //打入信号——上升沿有sbit RXD=P3^0; //模拟串口读入针脚sbit SW_out = P3^5; //开关输出针脚uchar K; //标志定时器0溢出中断是否发生uchar END; //结束位uchar MySBUF; //存放1帧数据uchar value[9]; //存放9字节数据的数组uint dist,dist1; //存放距离的变量uint HEADER = 0x59; //帧头uint th_value = 100; //设定开关阈值厘米uchar code table[ ]= { 0xC0, //"0"0xF9, //"1"0xA4, //"2"0xB0, //"3"0x99, //"4"0x92, //"5"0x82, //"6"0xF8, //"7"0x80, //"8"0x90 //"9"}; //八段共阳数码管/************************************************************************ **延时3us************************************************************************/ void Delay3us() //@30MHz{unsigned char i;i = 20;while (--i);}/************************************************************************ **延时10ms************************************************************************/ void Delay10ms() //@30MHz{unsigned char i, j, k;_nop_();_nop_();i = 2;j = 36;k = 206;do{do{while (--k);} while (--j);} while (--i);}/************************************************************************* **等待中断发生**************************************************************************/ void WaitTF0(void){while(!K);K=0;}/*************************************************************************读1帧函数(波特率115200)***********************************************************************/ void RByte(void){uchar i=8;END=0;while(!END) //循环,直到确认结束位{while(RXD); //等待起始位低电平Delay3us(); //起始位开始后延时3usTR0=1; //定时器0开始计时WaitTF0(); //延迟8.6uswhile(i--) //重复8次,每次读1位(先收低位){MySBUF >>=1; //左移1位if(RXD) MySBUF |= 0x80; //若高电平,则最高位写1WaitTF0(); //延迟8.6us}END=RXD;}TR0=0;}/************************************************************************ **读TFmini函数************************************************************************/ void read_TFmini(void){uchar check; //用来存放校验码uint j;while(dist==0) //循环,直到得到距离值{while(value[1] != HEADER) //循坏,直到第1和第2帧都等于0x59{RByte(); //接收1帧if(MySBUF == HEADER) //如果接收到的是0x59{value[0] = MySBUF; //保存到数组RByte(); //接收下1帧if(MySBUF == HEADER) //如果下1帧也等于0x59{value[1] = MySBUF; //保存到数组}}}for(j=2;j<9;j++) //循环接收剩余7帧{RByte(); //依次接收各帧value[j] = MySBUF; //保存到数组}check = value[0]+value[1]+value[2]+value[3]+value[4]+value[5]+value[6]+value[7];if(value[8] == (check & 0xFF)) //检验前8字节数据和的低8位是否等于第9位{dist = value[2] + value[3] * 256; //计算距离值}}}/****************************************************************595串入并出函数***************************************************************/void LED_OUT(uchar X){uchar i;for(i=8;i>=1;i--){if (X&0x80) DIO=1;else DIO=0;X<<=1;SK = 0;SK = 1;}}/***************************************************************** **显示函数*****************************************************************/ void Display(uchar a,uchar b,uchar c,uchar d){uchar j;for(j=0;j<3;j++){//显示千位LED_OUT(table[a]);LED_OUT(0x08);RK = 0;RK = 1;//显示百位LED_OUT(table[b] & 0x7F);LED_OUT(0x04);RK = 0;RK = 1;//显示十位LED_OUT(table[c]);LED_OUT(0x02);RK = 0;RK = 1;//显示个位LED_OUT(table[d]);LED_OUT(0x01);RK = 0;RK = 1;//关闭个位LED_OUT(0x00);RK = 0;RK = 1;}}/**************************************************************************** ** 函数名称:主函数入口****************************************************************************/ void main(void){//设置中断1(定时器0溢出中断,时间间隔8.6us@30MHz)AUXR |= 0x80; //定时器时钟1T模式TMOD &= 0xF0; //设置定时器模式TL0 = 0xFC; //设置定时初值TH0 = 0xFE; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 0; //定时器停止计时ET0=1; //允许定时器0中断EA=1; //中断允许总开关while(1){value[0]=0x00;value[1]=0x00;dist=0; //距离清零read_TFmini(); //调用读TFmini函数dist1=dist;if(dist<=30 || dist>=1200) dist=0000; //超出范围就显示0Display(dist/1000,dist%1000/100,dist%100/10,dist%10); //调用数码管显示函数value[0]=0x00;value[1]=0x00;dist=0;Delay10ms();read_TFmini(); //间隔10ms再次调用读TFmini函数if(dist/10==dist1/10 && dist1 >= th_value)SW_out = 0; //超过阈值则将输出针脚置0if(dist/10==dist1/10 && dist1 < (th_value-3))SW_out = 1; //小于阈值则将输出针脚置1,迟滞3cm}}/****************************************************************************** **中断处理******************************************************************************/void Int() interrupt 1{K=1; //标志位=1说明定时器0溢出中断已经发生。