Simulink中连续与离散模型的区别
离散和连续概率模型

离散和连续概率模型
离散和连续概率模型是概率论研究的两个重要分支。
离散概率模型涉及离散变量,而
连续概率模型涉及连续变量。
离散概率模型是指随机变量取值是一个离散的集合,例如投硬币的结果(正面或反面)或掷骰子的结果(1-6)。
在离散概率模型中,我们可以定义概率质量函数(PMF),用于
描述每个值的概率。
例如,一个投硬币的概率质量函数可能如下所示:
P(正面)= 0.5
P(反面)= 0.5
f(x)=(1 / σ√(2π))exp(-(x-μ)^2 / 2σ^2)
其中,μ是平均值,σ是标准差。
离散和连续概率模型都有一个重要的概念,即期望值。
期望值是一组数据中所有变量
的平均值。
在离散概率模型中,期望值公式为:
E(X)= ∑xP(X = x)x
在连续概率模型中,期望值公式为:
其中,xf(x)表示随机变量X的概率密度函数。
Var(X)= ∫(x-μ)^2f(x)dx
综上所述,离散和连续概率模型都是概率论研究的重要分支。
它们分别针对随机变量
的离散和连续两种情况,并通过概率质量函数或概率密度函数来描述随机变量的分布情况。
在实际应用中,离散概率模型和连续概率模型经常用于解决不同的问题,例如离散概率模
型可以用于模拟二项分布或泊松分布,在计算机网络中广泛应用。
而连续概率模型则适用
于金融、科学研究和医学统计等领域。
SIMULINK的基本模块
表10
模块名
功能简介
Atomic Subsystem
CodeReuseSubsystem
Configurable Subsystem
Enable
Enable Subsystem
Enabled and Triggered Subsystem
For Iterator Subsystem
Function-Call Generator
Repeating Sequence Interpol…
Repeating Sequence stair
Signal Builder
Signal Generator
Sine Wave
Step
Uniform Random Number
图15
表15
模块库
功能简介
EmbeddedMATLAB Function
Selector
Switch
图13
表13
模块名
功能简介
Display
Floating Scope
Out1
Scope
Stop Simulation
Terminator
To File
To Workspace
XY Graph
图14
表14
模块库
功能简介
Band-Limited White Noise
Chirp Signal
Subtract
Sum
对输入求代数和
Sum of Elements
Trigonometric Function
三角函数
Unary Minus
Vector Concatenate
Weighted Sample Time Math
matlab simulink 环节

matlab simulink 环节(实用版)目录1.MATLAB Simulink 简介2.MATLAB Simulink 的基本组成3.MATLAB Simulink 的环节类型4.如何创建和编辑 MATLAB Simulink 环节5.MATLAB Simulink 环节的应用实例正文一、MATLAB Simulink 简介MATLAB Simulink 是 MATLAB 的一种可视化仿真环境,用户可以在其中建立、仿真和分析动态系统模型。
Simulink 提供了一个基于图形的用户界面,用户可以在其中通过拖拽和连接各个环节来构建模型。
Simulink 适用于各种领域的动态系统建模,如控制、通信、信号处理等。
二、MATLAB Simulink 的基本组成MATLAB Simulink 的基本组成包括以下几个部分:1.模型编辑器:模型编辑器是 Simulink 的主要工作区域,用户可以在其中创建和编辑模型。
2.库:库中包含了各种用于构建模型的预定义环节。
库分为 Simulink 标准库和自定义库两类。
3.工具栏:工具栏提供了一系列常用操作的快捷方式,如创建新模型、打开库等。
4.命令窗口:命令窗口用于执行 MATLAB 命令和 Simulink 操作,如仿真、求解等。
三、MATLAB Simulink 的环节类型MATLAB Simulink 中的环节分为以下几类:1.连续环节:表示连续时间系统,如积分器、微分器等。
2.离散环节:表示离散时间系统,如采样器、保持器等。
3.函数环节:表示各种数学函数,如线性函数、非线性函数等。
4.逻辑环节:表示逻辑运算,如与门、或门、非门等。
5.信号发生器:表示信号生成器,如正弦波发生器、脉冲发生器等。
6.接收器:表示信号接收器,如显示、记录等。
四、如何创建和编辑 MATLAB Simulink 环节在 MATLAB Simulink 中创建和编辑环节的方法如下:1.从库中选择环节:打开库,找到所需环节,单击并拖拽到模型编辑器中。
Simulink中连续与离散模型的区别
Simulink中连续与离散模型的区别matlab/simulink/simpowersystem中连续vs离散!本文中的一些具体数学推导见下面:计算机仿真技术1.连续系统vs离散系统连续系统是指系统状态的改变在时间上是连续的,从数学建模的角度来看,可以分为连续时间模型、离散时间模型、混合时间模型。
其实在simpowersystem的库中基本所有模型都属于连续系统,因为其对应的物理世界一般是电机、电源、电力电子器件等等。
离散系统是指系统状态的改变只发生在某些时间点上,而且往往是随机的,比如说某一路口一天的人流量,对离散模型的计算机仿真没有实际意义,只有统计学上的意义,所以在simpowersystem中是没有模型属于离散系统的。
但是在选取模型,以及仿真算法的选择时,常常提到的discrete model、discrete solver、discrete simulate type等等中的离散到底是指什么呢?其实它是指时间上的离散,也就是指离散时间模型。
下文中提到的连续就是指时间上的连续,连续模型就是指连续时间模型。
离散就是指时间上的离散,离散模型就是指离散时间模型,而在物理世界中他们都同属于连续系统。
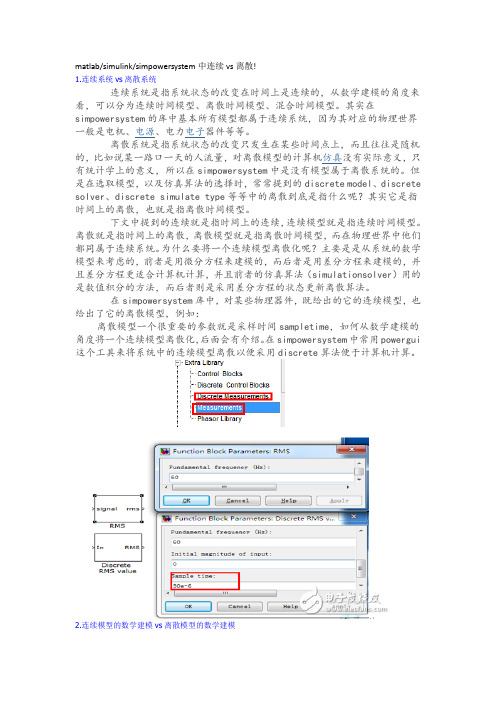
为什么要将一个连续模型离散化呢?主要是是从系统的数学模型来考虑的,前者是用微分方程来建模的,而后者是用差分方程来建模的,并且差分方程更适合计算机计算,并且前者的仿真算法(simulationsolver)用的是数值积分的方法,而后者则是采用差分方程的状态更新离散算法。
在simpowersystem库中,对某些物理器件,既给出的它的连续模型,也给出了它的离散模型,例如:离散模型一个很重要的参数就是采样时间sampletime,如何从数学建模的角度将一个连续模型离散化,后面会有介绍。
在simpowersystem中常用powergui这个工具来将系统中的连续模型离散以便采用discrete算法便于计算机计算。
数学模型和模拟中的连续模型与离散模型
数学模型和模拟中的连续模型与离散模型数学模型和计算机模拟已经成为了许多领域的重要研究手段。
然而,在进行模型建立和模拟过程中,要根据具体问题的特点选择合适的模型类型。
在数学模型和模拟中,常见的模型类型有连续模型和离散模型两种。
连续模型是指一个作用在连续空间上的模型。
例如,微积分中的连续函数模型就是一个常用的连续模型。
这种模型常常用来描述实际问题中的连续过程,如流体力学、热力学等领域。
在连续模型中,物理量在不同时间和空间位置上都可以取到连续的值,因此它通常需要使用微积分的方法来求解。
同时,连续模型可以使用经典的物理方程来描述,如牛顿运动方程和麦克斯韦方程等。
离散模型是指一个作用在离散空间上的模型。
例如,数学中的离散数学模型就是一个常用的离散模型。
这种模型常常用来描述实际问题中的离散现象,如计算机科学、网络科学等领域。
在离散模型中,物理量在不同时间和空间位置上的取值是离散的,因此通常使用离散的数学工具来求解。
同时,离散模型的建立通常需要使用离散数学的方法,如排列组合、图论等。
对于一些实际问题,可以采用混合模型来描述。
例如,植物的生长状态是一个连续过程,可以使用连续模型来描述,但是植物的个体生长是一个离散过程,需要使用离散模型来描述。
因此,可以利用混合模型来描述植物的生长问题。
在建立模型时,需要深入了解问题的特点和要求,选择合适的模型类型进行建模。
同时,需要灵活应用不同模型之间的转化关系,充分利用模型的优势,提高模型的解决问题的能力。
总之,数学模型和模拟在科学研究和工程应用中起着重要的作用,并且连续模型和离散模型都有其独特的适用范围。
因此,我们需要充分了解不同类型的模型特点和应用情况,遵循科学的方法建立模型,提高模型的准确性和实用性。
Simulink在线帮助文档
本科毕业论文翻译Simulink工作原理导言Simulink是一个软件包,它可以让您将模型,模拟和分析系统,其输出随时间而改变。
这些系统通常被称为动态系统。
该仿真软件可用于探索行为的范围广泛的现实世界的动态系统,包括电路,减震器,制动系统,以及许多其他的电气,机械和热力系统。
本节说明Simulink的工作原理。
基于Simulink的系统仿真是一个动态的过程,分为两步:首先,用户利用仿真模型编辑器创建一个框图,模型图形化地描述了系统中基于时间输入,状态和输出之间的数学关系。
然后用户命令Simulink软件从指定的开始时间到指定的停止时间,模拟模型所代表的系统。
动态系统建模框图语义一个simulink结构图模型是对动态系统的绘图式的数学描述。
动态系统的一个典型框图模型图形由块和线(信号)。
这些框图模型的历史是从工程领域,如反馈控制理论与信号处理而得。
框图内的块定义一个动态系统本身。
以框图的每个基本动态系统之间的关系由利用连接块的信号说明。
集体中的框图的块和行描述的整体的动态系统。
Simulink通过介绍两种典型的模块:虚拟模块和非虚拟模块来扩展那些典型的结构图模型。
虚拟模块代表子系统。
虚拟模块的存在仅是为了方便组织图形,他们并不影响方程所描述的框图模型。
您可以使用虚拟模块,以改善模型的可读性。
一般情况下,模块和线可以用来描述许多“计算”的模式。
典型的一个例子是一个流程图。
流程图包括模块和线,但是无法使用一般动态系统流程图语义来描述。
术语“基于时间的模块框图”是用来区分描述动力系统的框图与其他形式的框图,并且框图(或模型)是指一个基于时间的框图或模型,除非上文中有特别的指出:1.时间开始于一个用户指定的“开始时间”,并结束于用户指定的“停止时间。
对这些关系的每一个评估被称为时间步长。
2.信号代表数量随时间变化,并确定了各点之间的方框图的开始时间和结束时间。
3.信号和状态变量之间的关系由模块代表的一组方程所决定。
simulink中连续与离散的设置
simulink中连续与离散的设置在Simulink中,我们可以使用连续与离散的设置来进行系统建模与仿真。
连续与离散是两种不同的系统模型,每种模型都有其适用的场景和特点。
本文将介绍Simulink中如何进行连续与离散的设置,以及它们的应用和区别。
首先,我们来讨论连续系统的建模与仿真。
在连续系统中,信号是连续的,并且在每个时间点都有定义。
对于连续系统的建模,我们可以使用连续的数学方程描述系统的动态行为,例如微分方程。
在Simulink中,我们可以通过添加连续系统的输入和输出信号来建立连续系统的模型。
同时,我们需要选择适当的求解器来求解连续系统的微分方程并进行仿真。
Simulink提供了多种求解器选项,可以根据系统的特点选择合适的求解器。
接下来,我们来讨论离散系统的建模与仿真。
在离散系统中,信号是在离散时间点上采样得到的。
对于离散系统的建模,我们可以使用差分方程来描述系统的动态行为。
在Simulink中,我们可以使用离散的采样和保持模块来建立离散系统的模型。
在进行仿真时,Simulink会根据系统的差分方程进行离散化处理,并使用适当的离散求解器进行仿真。
与连续系统不同,离散系统的仿真是在每个离散时间点上进行的。
在Simulink中,我们可以将连续与离散系统进行组合,建立连续与离散混合系统的模型。
这种混合系统常见于控制系统中,例如连续控制器与离散执行器的组合。
在Simulink中,我们可以使用连续与离散的模块将连续部分和离散部分进行连接,并通过设置适当的采样时间来进行仿真。
同时,我们还可以通过设置不同的触发条件来控制离散模块的执行时机,以满足系统设计的需求。
综上所述,Simulink中提供了丰富的工具和功能来设置连续与离散系统,以及连续与离散混合系统的建模与仿真。
通过合理选择求解器、采样时间和触发条件,我们可以准确地模拟和分析各种系统的动态行为。
无论是连续模型、离散模型还是混合模型,Simulink都能提供强大的支持和灵活性。
离散连续详解
matlab/simulink/simpowersystem中连续vs离散!1.连续系统vs离散系统连续系统是指系统状态的改变在时间上是连续的,从数学建模的角度来看,可以分为连续时间模型、离散时间模型、混合时间模型。
其实在simpowersystem 的库中基本所有模型都属于连续系统,因为其对应的物理世界一般是电机、电源、电力电子器件等等。
离散系统是指系统状态的改变只发生在某些时间点上,而且往往是随机的,比如说某一路口一天的人流量,对离散模型的计算机仿真没有实际意义,只有统计学上的意义,所以在simpowersystem中是没有模型属于离散系统的。
但是在选取模型,以及仿真算法的选择时,常常提到的discrete model、discrete solver、discrete simulate type等等中的离散到底是指什么呢?其实它是指时间上的离散,也就是指离散时间模型。
下文中提到的连续就是指时间上的连续,连续模型就是指连续时间模型。
离散就是指时间上的离散,离散模型就是指离散时间模型,而在物理世界中他们都同属于连续系统。
为什么要将一个连续模型离散化呢?主要是是从系统的数学模型来考虑的,前者是用微分方程来建模的,而后者是用差分方程来建模的,并且差分方程更适合计算机计算,并且前者的仿真算法(simulationsolver)用的是数值积分的方法,而后者则是采用差分方程的状态更新离散算法。
在simpowersystem库中,对某些物理器件,既给出的它的连续模型,也给出了它的离散模型,例如:离散模型一个很重要的参数就是采样时间sampletime,如何从数学建模的角度将一个连续模型离散化,后面会有介绍。
在simpowersystem中常用powergui这个工具来将系统中的连续模型离散以便采用discrete算法便于计算机计算。
2.连续模型的数学建模vs离散模型的数学建模Note:这里的连续和离散都是指时间上的连续和离散,无关乎现实世界的连续系统和离散系统。
Simulink模块库简介
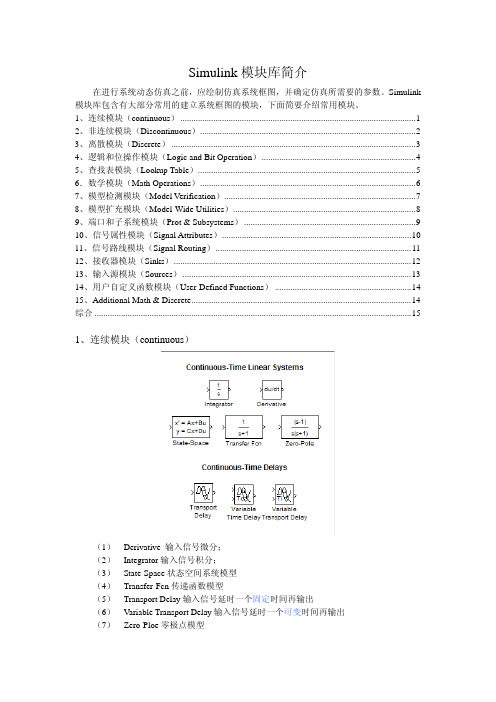
Simulink模块库简介在进行系统动态仿真之前,应绘制仿真系统框图,并确定仿真所需要的参数。
Simulink 模块库包含有大部分常用的建立系统框图的模块,下面简要介绍常用模块。
1、连续模块(continuous) (1)2、非连续模块(Discontinuous) (2)3、离散模块(Discrete) (3)4、逻辑和位操作模块(Logic and Bit Operation) (4)5、查找表模块(Lookup Table) (5)6.数学模块(Math Operations) (6)7、模型检测模块(Model Verification) (7)8、模型扩充模块(Model-Wide Utilities) (8)9、端口和子系统模块(Prot & Subsystems) (9)10、信号属性模块(Signal Attributes) (10)11、信号路线模块(Signal Routing) (11)12、接收器模块(Sinks) (12)13、输入源模块(Sources) (13)14、用户自定义函数模块(User-Defined Functions) (14)15、Additional Math & Discrete (14)综合 (15)1、连续模块(continuous)(1) Derivative 输入信号微分;(2) Integrator输入信号积分;(3) State-Space状态空间系统模型(4) Transfer-Fcn传递函数模型(5) Transport Delay输入信号延时一个固定时间再输出(6) Variable Transport Delay输入信号延时一个可变时间再输出(7) Zero-Ploe零极点模型2、非连续模块(Discontinuous)(1) Backlash间隙非线性(2) Coulomb&Viscous Friction库仑和粘度摩擦非线性(3) Dead Zone死区非线性(4)Dead Zone Dynamic动态死区非线性(5) Hit Crossing冲击非线性(6) Quantizer量化非线性(7) Rate Limiter静态限制信号的变化速率(8) Rate Limiter Dynamic动态限制信号的变化速率(9) Relay滞环比较器,限制输出值在某一范围内变化(10) Saturation饱和输出,让输出超过某一值是能够饱和(11) Saturation Dynamic动态饱和输出(12) Wrap To Zero3、离散模块(Discrete)(1) Difference差分环节(2) Discrete Derivative 离散微分环节(3) Discrete Filter 离散滤波器(4) Discrete State-Space 离散状态空间系统模型(5) Discrete Transfer Fcn 离散传递函数模型(6) Discrete Zero-Pole 以零极点表示的离散传递函数模型(7) Discrete-Time Integrator 离散时间积分器(8) First-Order Hold 一阶保持器(9) Integer Delay 整数被延迟(10) Memory 输出本模块上一步的输入值(11) Tapped Delay 延迟(12) Transfer Fcn First Order 离散一阶传递函数(13) Transfer Fcn Lead or Lag 传递函数(14) Transfer Fcn Real Zero 离散零点传递函数(15) Unit Delay 一个采样周期的延时(16) Weighted Moving Average 权值移动平均模型(17) Zero-Order Hold 零阶保持器4、逻辑和位操作模块(Logic and Bit Operation)(1) Bit Clear 位清零(2) Bit Set 位置位(3) Bitwise Operator 逐位操作(4) Combinatorial Logic 组合逻辑(5) Compare To Constant 和常量比较(6) Compare To Zero 和零比较(7) Detect Change 检测跳变(8) Detect Decrease 检测递减(9) Detect Fall Negative 检测负上升沿(10) Detect Fall Nonpositive 检测非负下降沿(11) Detect Increase 检测递增(12) Detect Rise Nonnegative 检测非负上升沿(13) Detect Rise Positive 检测正上升沿(14) Extract Bits 提取位(15) Interval Test 检测开区间(16) Interval Test Dynamic 动态检测开区间(17) Logical Operator 逻辑操作符(18) Relational Operator 关系操作符(19) Shift Arithmetic 移位运算5、查找表模块(Lookup Table)(1) Cosine 余弦函数查询表(2) Direct Lookup Table (n-D) n个输入信号的查询表(直接匹配)(3) Interpolation (n-D) using PreLookup n个输入信号的预插值(4) Lookup Table 输入信号的查询表(线性峰值匹配)(5) Lookup Table (2-D) 两维输入信号的查询表(线性峰值匹配)(6) Lookup Table (n-D) n维输入信号的查询表(线性峰值匹配)(7) Lookup Table Dynamic 动态查询表(8) PreLookup Index Search 预查询索引搜索(9) Sine 正弦函数查询表6.数学模块(Math Operations)(1) Abs 取绝对值(2) Add 加法(3) Algebraic Constraint 代数约束(4) Assignment 赋值(5) Bias 偏移(6) Complex to Magnitude-Angle 由复数输入转为幅值和相角输出(7) Complex to Real-Imag 由复数输入转为实部和虚部输出(8) Divide 除法(9) Dot Product 点乘运算(10) Gain 比例运算(11) Magnitude-Angle to Complex 由幅值和相角输入合成复数输出(12) Math Function 包括指数函数、对数函数、求平方、开根号等常用数学函数(13) Matrix Concatenation 矩阵级联(14) MinMax 最值运算(15) MinMax Running Resettable 最大最小值运算(16) Polynomial 多项式(17) Product 乘运算(18) Product of Elements 元素乘运算(19) Real-Imag to Complex 由实部和虚部输入合成复数输出(20) Reshape 取整(21) Rounding Function 舍入函数(22) Sign 符号函数(23) Sine Wave Function 正弦波函数(24) Slider Gain 滑动增益(25) Subtract 减法(26) Sum 求和运算(27) Sum of Elements 元素和运算(28) Trigonometric Function 三角函数,包括正弦、余弦、正切等(29) Unary Minus 一元减法(30) Weighted Sample Time Math 权值采样时间运算7、模型检测模块(Model Verification)(1) Assertion 确定操作(2) Check Discrete Gradient 检查离散梯度(3) Check Dynamic Gap 检查动态偏差(4) Check Dynamic Lower Bound 检查动态下限(5) Check Dynamic Range 检查动态范围(6) Check Dynamic Upper Bound 检查动态上限(7) Check Input Resolution 检查输入精度(8) Check Static Gap 检查静态偏差(9) Check Static Lower Bound 检查静态下限(10) Check Static Range 检查静态范围(11) Check Static Upper Bound 检查静态上限8、模型扩充模块(Model-Wide Utilities)(1) Block Support Table 功能快支持的表(2) DocBlock 文档模块(3) Model Info 模型信息(4) Timed-Based Linearization 时间线性分析(5) Trigger-Based Linearization 触发线性分析9、端口和子系统模块(Prot & Subsystems)(1) Configurable Subsystem 结构子系统(2) Atomic Subsystem 单元子系统(3) CodeReuseSubsystem 代码重用子系统(4) Enable 使能(5) Enabled and Triggered Subsystem 使能和触发子系统(6) Enabled Subsystem 使能子系统(7) For Iterator Subsystem 重复操作子系统(8) Function-Call Generator 函数响应生成器(9) Function-Call Subsystem 函数响应子系统(10) If 假设操作(11) If Action Subsystem 假设动作子系统(12) In1 输入端口(13) Model 模型(14) Out1 输出端口(15) Subsystem 子系统(16) Subsystem Examples 子系统例子(17) Switch Case 转换事件(18) Switch Case Action Subsystem 转换事件子系统(19) Trigger 触发操作(20) Triggered Subsystem 触发子系统(21) While Iterator Subsystem 重复子系统10、信号属性模块(Signal Attributes)(1) Data Type Conversion 数据类型转换(2) Data Type Conversion Inherited 继承的数据类型转换(3) Data Type Duplicate 数据类型复制(4) Data Type Propagation 数据类型继承(5) Data Type Propagation Examples 数据类型继承例子(6) Data Type Scaling Strip 数据类型缩放(7) IC 信号输入属性(8) Probe 探针点(9) Rate Transition 比率变换(10) Signal Conversion 信号转换(11) Signal Specification 信号特征说明(12) Weighted Sample Time 权值采样时间(13) Width 信号带宽11、信号路线模块(Signal Routing)(1) Bus Assignment 总线分配(2) Bus Creator 总线生成(3) Bus Selector 总线选择(4) Data Store Memory 数据存储(5) Data Store Read 数据存储读取(6) Data Store Write 数据存储写入(7) Demux 将一个复合输入转化位多个单一输出(8) Environment Controller 环境控制器(9) From 信号来源(10) Goto 信号去向(11) Goto Tag Visibility 标签可视化(12) Index Vector 索引向量(13) Manual Switch 手动选择开关(14) Merge 信号合并(15) Multiport Switch 多端口开关(16) Mux 将多个单一输入转化为一个复合输出(17) Selector 信号选择器(18) Switch 开关选择,当第二输入端大于临界值时,输出由第一个输入端而来,否则输出由第三输入端而来(1) Display 数字显示器(2) Floating Scope 浮动观察器(3) Out1 输出端口(4) Scope 示波器(5) Stop Simulation 仿真停止(6) Terminator 连接到没有连接到的输出端(7) To File 将输出数据写入数据文件保存(8) To Workspace 将输出数据写入Matlab的工作空间(9) XY Graph 显示二维图形(1) Band-Limited White Noise 带限白噪声(2) Chirp Signal 产生一个频率不断增大的正弦波(3) Clock 显示和提供仿真时间(4) Constant 常数信号(5) Counter Free-Running 无限计数器(6) Counter Limited 有限计数器(7) Digital Clock 在规定的采样间隔产生仿真时间按(8) From File 来自数据文件(9) From Workspace 来自Matlab的工作空间(10) Ground 连接到没有连接到的输入端(11) In1 输入信号(12) Pulse Generator 脉冲发生器(13) Ramp 斜坡信号输入(14) Random Number 产生正态分布的随机数(15) Repeating Sequence 产生规律重复的任意信号(16) Repeating Sequence Interpolated 重复序列内插值(17) Repeating Sequence Stair 重复阶梯序列(18) Signal Builder 信号创建器(19) Signal Generator 信号发生器,可以产生正弦波、方波、锯齿波及任意波形(20) Sine Wave 正弦波信号(21) Step 阶跃信号(22) Uniform Random Number 一致随机数14、用户自定义函数模块(User-Defined Functions)(1) Embedded MATLAB Function 嵌入的Matlab函数(2) Fcn 用自定义的函数(表达式)进行运算(3) Level-2 M-file S-Function M文件编写的S函数(4) MATLAB Fcn 利用Matlab的现有函数进行运算(5) S-Function 调用自编的S函数程序进行运算(6) S-Function Builder S函数建立器(7) S-Function Examples S函数例子15、Additional Math & Discrete(1) Additional Discrete(2) Additional Math: Increment – Decrement综合。
Simulink基本模块介绍

2
3
4
5
6
7
8
9
10
4. 积分模块
作用:计算输入信号从起始时间到当前时刻对时间的积分。 代表如下微分方程: y (t ) = y (t0 ) + 积分模块如图所示: 例如:
1 s Integrator
1 0.8 0.6 0.4 0.2
∫
t t0
x(τ )dτ
y (t ) = ∫ sin(t )dt = − cos(t ) + C = − cos(t )
系统矩阵
考虑 n 自由度系统:
&& & MX (t ) + CX (t ) + KX (t ) = F (t )
X (t ) = [ x1 (t ), x2 (t ), L, xn (t )]T ∈ R n×1
M ∈R K ∈ R n×n
令:
n×n
n 维广义坐标列向量 阻尼矩阵 外部输入列矩阵
质量矩阵 刚度矩阵
C ∈ R n×n F (t ) ∈ R n×n
⎡ X (t )⎤ Y (t ) = ⎢ & ⎥ ∈ R 2 n×1 ⎣ X (t )⎦
2n 维系统状态列向量
系统的状态方程:
& Y (t ) = AY (t ) + BF (t )
I n× n ⎤ ∈ R 2 n× 2 n − M −1C ⎥ ⎦
⎡ 0 n× n ⎤ B = ⎢ −1 ⎥ ∈ R 2 n×n ⎣M ⎦
x(t)
k
增益模块
y(t)
k Gain
Simulink 增义模块图
注意:y(t)、x(t)、k 可以为标量、向量或矩阵。
来自Sinks库
SIMULINK仿真基础之离散时间系统分析

动态性能分析
动态性能分析主要关注离散 时间系统在输入信号的作用 下,系统状态随时间变化的
特性。
动态性能可以通过系统的传 递函数或状态方程进行分析 ,常用的性能指标包括系统 的超调和调节时间、上升时
间、峰值时间等。
根据系统要求,确定优化设计的性能指标,如响 应速度、稳定性、鲁棒性等。
仿真验证
通过Simulink等仿真工具对优化后的系统进行 仿真验证,评估性能指标是否满足要求。
离散时间系统优化设计的结果评估
性能指标对比 参数灵敏度分析
可行性分析 综合评估
将优化后的系统性能指标与原始系统进行对比,评估优化的效 果。
除了极点位置,系统的稳定性还可以通过其他方法进行判断,如劳斯-赫尔维茨准则和庞德里亚金稳定性 定理等。
收敛性分析
收敛性分析主要关注离散时间系统在迭代过程中是否能够收敛到某个固定 点或稳定状态。
收敛速度与系统的收敛阶数有关,收敛阶数越高,收敛速度越快。收敛阶 数可以通过系统的迭代公式或矩阵特征值来计算。
离散时间系统的特点
离散时间信号只在离散的时间点上取值。
离散时间系统的动态行为由差分方程描述。
离散时间系统的稳定性分析通常采用Z变换和差分 方程的方法。
离散时间系统的应用场景
数字信号处理
数字滤波器、数字控制系统等。
计算机控制系统
计算机控制系统中的离散时间模型。
通信系统
数字通信、调制解调等。
数字图像处理
可编程逻辑器件(PLD)
可编程逻辑器件是一种用户可编程的集成电路,如FPGA和CPLD。它们能够实 现各种数字逻辑和组合逻辑功能,适用于大规模离散时间系统的实现。
simulink系统建模
子系统的分类
• 1.使能子系统 1.使能子系统 • 2.触发子系统 2.触发子系统 • 3.函数调用子系统 3.函数调用子系统
使能子系统
• 当控制信号为真时,子系统开始执行,也
即输入的信号为正数时,子系统开始执行。 • 以实例的形式进行讲解
触发子系统
• 触发子系统就是在控制信号符号发生变化
时执行子系统。下面以实例进行讲解。
离散系统建模
• 离散系统通常是用差分方程来描述的系统,
而在实验中基本上都是采用离散采样。利 用simulink建模时,通常使用的模块有 simulink建模时,通常使用的模块有 discret模块库、math operation模块库、 discret模块库、math operation模块库、 sink模块库、source模块库等等。我们用一 sink模块库、source模块库等等。我们用一 个例子来说明在simulink中离散系统的建模。 个例子来说明在simulink中离散系统的建模。
触发使能子系统
• 触发使能子系统,就是同时融合了触发子
系统和使能子系统的功能,我们以实例的 形式进行讲解。
Simulink系统建模 Simulink系统建模
1.连续系统建模 1.连续系统建模 2.离散系统建模 2.离散系统建模 3.混合系统建模 3.混合系统建模
连续系统建模
• 连续系统通常是利用微分方程描述的系统,而在现实世界 连续系统通常是利用微分方程描述的系统,
中的多数实际系统都是连续变化的.利用simulink建模时, 中的多数实际系统都是连续变化的.利用simulink建模时, 通常使用的模块有continuous模块库、math operation模 通常使用的模块有continuous模块库、math operation模 块库等等。下面以几个例子讲述在simulink中连续系统的 块库等等。下面以几个例子讲述在simulink中连续系统的 建模。 1.直接使用积分模块缺省设置 1.直接使用积分模块缺省设置 2.利用上升信号进行复位积分 2.利用上升信号进行复位积分 3.利用下降信号进行复位积分 3.利用下降信号进行复位积分 4.利用水平信号进行复位积分 4.利用水平信号进行复位积分 5.利用阶跃信号进行复位积分 5.利用阶跃信号进行复位积分
认识Simulink的重要模块库
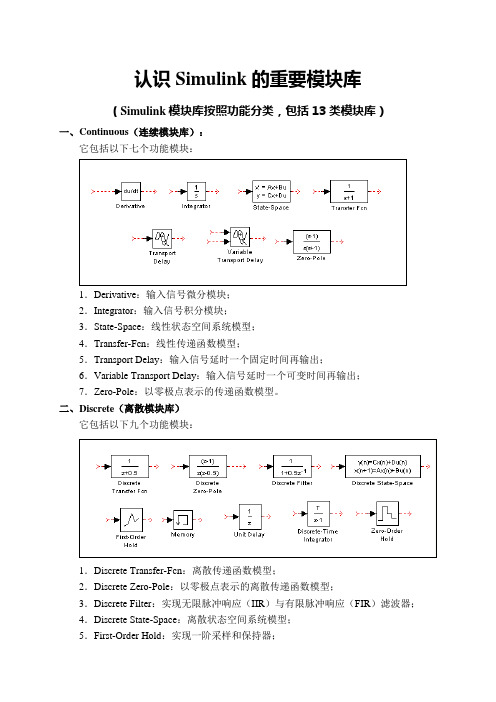
认识Simulink的重要模块库(Simulink模块库按照功能分类,包括13类模块库)一、Continuous(连续模块库):它包括以下七个功能模块:1.Derivative:输入信号微分模块;2.Integrator:输入信号积分模块;3.State-Space:线性状态空间系统模型;4.Transfer-Fcn:线性传递函数模型;5.Transport Delay:输入信号延时一个固定时间再输出;6.Variable Transport Delay:输入信号延时一个可变时间再输出;7.Zero-Pole:以零极点表示的传递函数模型。
二、Discrete(离散模块库)它包括以下九个功能模块:1.Discrete Transfer-Fcn:离散传递函数模型;2.Discrete Zero-Pole:以零极点表示的离散传递函数模型;3.Discrete Filter:实现无限脉冲响应(IIR)与有限脉冲响应(FIR)滤波器;4.Discrete State-Space:离散状态空间系统模型;5.First-Order Hold:实现一阶采样和保持器;6.Memory:存储上一个时刻的状态值;7.Unit Delay:一个采样周期的延时;8.Discrete-time Integrator:离散时间积分器;9.-Order Hold:实现零阶采样和保持器。
三、Look-Up Tables(查询表模块库)它包括以下六个功能模块:1.Direct Look-Up Table(n-D):检索n维表,以重新获得标量、向量或2维矩阵2.Interpolation(n-D)using PreLook-Up:执行高精度的常值或线性插值3.Look-Up Table:使用指定的查表方法近似一维函数,即建立输入信号的查询表4.Look-Up Table(2-D): 使用指定的查表方法近似二维函数,即建立两个输入信号的查询表5.Look-Up Table(n-D):执行n个输入定常数、线性或样条插值映射6.PreLook-Up Index Search:在设置的断点处为输入执行检索查找和小数计算四、Math Operations(数学运算模块库)它包括以下25个功能模块:1.Abs:对输入信号求绝对值运算;2.Sum:加减运算,可以加减标量、向量和矩阵;3.Product:对输入信号求积和商运算;4.Dot Product:点积(内积)运算;5.Gain:比例运算,或称为常量增益(输入信号乘以常数);6.Sign:表明输入符号信号或符号函数;7.MinMax:输出输入信号的最小值和最大值(即极值运算);8.Slider Gain:可以用滑动条来改变增益;9.Matrix Gain:矩阵增益,即输入信号乘以矩阵;10.Math Function:包括指数、对数函数、求平方、开根号等常用数学运算函数;11.Rounding Function:取整运算函数;12.Trigonometric Function:三角函数,包括正弦、余弦、正切等;13.Logical Operator:逻辑运算14.Relational Operator:关系运算15.Complex to Magnitude-Angle:由复数输入信号转为幅值和相角输出;16.Magnitude-Angle to Complex:由幅值和相角输入信号合成复数输出;17.Complex to Real-Imag:由复数输入信号转为实部和虚部输出;18.Real-Imag to Complex:由实部和虚部输入信号合成复数输出。
3. 离散控制与连续控制的主要区别是什么?

3. 离散控制与连续控制的主要区别是什么?嘿,咱们今天来聊聊离散控制和连续控制这对“小伙伴”,看看它们到底有啥主要区别。
先来说说离散控制吧。
比如说,咱们学校的下课铃,“叮铃铃”一响,这就是一种离散控制。
铃声响起,这堂课结束,下堂课开始,特别干脆利落,没有什么中间过渡。
再比如咱们去坐公交车,每到一个站点停车,这也是离散控制。
站点是固定的,到了站就停,没到就继续开。
离散控制就像咱们小时候玩的跳格子游戏,一格一格分得清清楚楚,只能在特定的格子里落脚。
它处理的信号往往是不连续的,是一个个独立的“点”。
那连续控制又是啥样呢?想象一下你骑着自行车在路上,你通过不停地调整把手来控制方向,这个调整的过程是连续不断的,没有明显的停顿或者跳跃。
又比如说,家里调节空调的温度,你可以从 20 度慢慢调到 25 度,这中间的温度变化是平滑过渡的,这就是连续控制。
连续控制就像是在平滑的滑梯上滑行,没有明显的阶梯,一路顺畅。
它处理的信号是连续变化的,就像一条流淌的小河,没有断开的地方。
我记得有一次,我去工厂参观,看到了一个生产线上的机器人在进行零件装配。
那个机器人的动作就是典型的离散控制,它拿起零件、放下零件,每个动作都很明确,一步一步,毫不含糊。
而旁边控制生产线上物料传输速度的装置,则是连续控制,速度的变化是缓缓进行的,非常平稳。
从数学角度来看,离散控制通常用离散的数学模型来描述,比如差分方程。
而连续控制则常用微分方程这样的连续数学模型。
这就好比离散控制是一颗颗散落的珍珠,而连续控制是一条完整的珍珠项链。
在实际应用中,离散控制常用于数字电路、计算机控制系统这些地方。
因为计算机处理的信息本身就是离散的嘛。
而连续控制呢,则在工业生产中的过程控制,比如化工生产、电力系统中大展身手。
总的来说,离散控制和连续控制各有各的特点和适用场景。
它们就像我们生活中的左右手,虽然有所不同,但都能帮助我们完成各种任务。
所以呀,下次当你再听到离散控制或者连续控制这两个词的时候,是不是就能更清楚地理解它们的区别啦?。
SIMULINK的模块库介绍

SIMULINK的模块库介绍SIMILINK模块库按功能进行分为以下8类子库:Continuous(连续模块)Discrete(离散模块)Function&Tables(函数和平台模块)Math(数学模块)Nonlinear(非线性模块)Signals&Systems(信号和系统模块)Sinks(接收器模块)Sources(输入源模块)连续模块(Continuous)continuous.mdlIntegrator:输入信号积分Derivative:输入信号微分State-Space:线性状态空间系统模型Transfer-Fcn:线性传递函数模型Zero-Pole:以零极点表示的传递函数模型Memory:存储上一时刻的状态值Transport Delay:输入信号延时一个固定时间再输出Variable Transport Delay:输入信号延时一个可变时间再输出离散模块(Discrete) discrete.mdlDiscrete-time Integrator:离散时间积分器Discrete Filter:IIR与FIR滤波器Discrete State-Space:离散状态空间系统模型Discrete Transfer-Fcn:离散传递函数模型Discrete Zero-Pole:以零极点表示的离散传递函数模型First-Order Hold:一阶采样和保持器Zero-Order Hold:零阶采样和保持器Unit Delay:一个采样周期的延时函数和平台模块(Function&Tables) function.mdlFcn:用自定义的函数(表达式)进行运算MATLAB Fcn:利用matlab的现有函数进行运算S-Function:调用自编的S函数的程序进行运算Look-Up Table:建立输入信号的查询表(线性峰值匹配)Look-Up Table(2-D):建立两个输入信号的查询表(线性峰值匹配)数学模块( Math ) math.mdlSum:加减运算Product:乘运算Dot Product:点乘运算Gain:比例运算Math Function:包括指数函数、对数函数、求平方、开根号等常用数学函数Trigonometric Function:三角函数,包括正弦、余弦、正切等MinMax:最值运算Abs:取绝对值Sign:符号函数Logical Operator:逻辑运算Relational Operator:关系运算Complex to Magnitude-Angle:由复数输入转为幅值和相角输出Magnitude-Angle to Complex:由幅值和相角输入合成复数输出Complex to Real-Imag:由复数输入转为实部和虚部输出Real-Imag to Complex:由实部和虚部输入合成复数输出非线性模块( Nonlinear ) nonlinear.mdlSaturation:饱和输出,让输出超过某一值时能够饱和。
离散控制与连续控制的对比分析

离散控制与连续控制的对比分析离散控制与连续控制是现代控制系统中两种重要的控制方式。
它们在工业生产、自动化系统以及其他领域中具有广泛应用。
本文将对离散控制与连续控制进行对比分析。
一、定义与特点离散控制是通过离散的输入信号来控制系统的工作状态。
它具有以下特点:1)输入和输出变量的取值是离散的,呈现出一步一步的跳变过程;2)离散控制对变量的采样时间有较高的要求,需要定时取样;3)离散控制系统具有较高的可编程性,易于实现逻辑控制。
连续控制是通过连续变化的输入信号来控制系统的工作状态。
它具有以下特点:1)输入和输出变量的取值是连续的,呈现出平滑变化的过程;2)连续控制系统对变量的采样时间要求不高,可以实现实时控制;3)连续控制系统的设计和调试相对复杂,需要考虑系统的稳定性和动态响应等因素。
二、控制方式离散控制常用的方式是逻辑控制。
逻辑控制以逻辑关系为基础,通过逻辑元件(如开关、触发器等)的组合和连接,实现对系统的控制。
逻辑控制可以满足一些简单的控制要求,对于复杂的系统则可能需要较多的逻辑元件,导致系统复杂度提高。
连续控制常用的方式是模拟控制。
模拟控制通过模拟信号来实现对系统的控制。
模拟控制系统通常由传感器、执行器、控制器以及反馈回路等组成,通过测量和调整模拟信号的大小和变化来控制系统的输出。
模拟控制能够实现对复杂系统的高精度控制。
三、应用范围离散控制适用于对系统进行逻辑判断和简单控制的场景。
例如,门禁系统、电梯控制系统等都属于离散控制的应用范围。
离散控制系统易于实现且成本相对较低,因此在一些简单的控制任务中得到广泛应用。
连续控制适用于对系统进行精确控制和调节的场景。
例如,化工生产过程中的温度控制、机械运动的速度控制等都需要连续控制来实现。
连续控制系统可以对系统进行连续监测和调整,能够满足对系统动态响应和稳定性的要求。
四、优缺点对比离散控制的优点是系统实现简单、灵活性高、可靠性强。
它可以方便地实现逻辑控制,能够满足一些简单的控制任务。
离散特征和连续特征

离散特征和连续特征
特征是机器学习中至关重要的概念,它可以描述数据中的属性和特征,有助于对数据进行分类、聚类等操作。
特征可以分为离散特征和连续
特征两种类型。
离散特征是数据中一些具有明确类别的特征,这些特征只能取有限个
数的值,如性别、年龄段、职业等等。
离散特征的值通常可以用数字
或字符来表示,但它们之间的差异不具有数量上的意义。
与离散特征不同的是,连续特征则是数据中一些具有连续取值的特征,其取值可以在一定范围内任意取值,如身高、体重、温度等。
连续特
征的值通常是一个实数,可以具有数量上的意义。
在机器学习中,特征的选择和提取对于模型的性能有着很大的影响。
对于离散特征,通常采用“独热编码”来进行数值化处理,即将每个
离散变量扩展为一个二进制变量,每个变量只有0和1两种取值。
例如,对于一个四个值的离散变量,可以将其表示为一个四维向量,每
个维度上只有一个元素为1,其他元素为0。
这样处理之后,就可以将离散特征与连续特征一起输入到模型中进行训练。
总之,离散特征和连续特征是机器学习中非常重要的概念,它们分别
描述了数据中不同的属性和特征。
在特征的选择和处理过程中,应根据实际情况灵活运用这两种特征,并结合具体的问题和模型,选取最适合的特征来进行训练和预测。
第6章Simulink系统仿真原理

图6.2中h为积分步长。注意,此图以最简单的多边 形积分近似算法为例说明积分误差的计算,在实际中 具体的方法视连续求解器的不同而不同。如果积分误 差满足绝对误差或相对误差,则仿真继续进行;如果 不满足,则求解器尝试一个更小的步长,并重复这个 过程。当然,连续求解器在选择更小步长时采用的方 法也不尽相同。如果误差上限值的选择或连续求解器 的选择不适合待求解的连续系统,则仿真步长有可能 会变得非常小,使仿真速度变得非常慢。(用户需要注 意这一点。)
6.1 Simulink求解器概念
6.1.1 离散求解器 第3章中简单介绍了动态系统的模型及其描述,其
中指出,离散系统的动态行为一般可以由差分方程描 述。众所周知,离散系统的输入与输出仅在离散的时 刻上取值,系统状态每隔固定的时间才更新一次;而 Simulink对离散系统的仿真核心是对离散系统差分方程 的求解。
6.2 系统过零的概念与解决方案
6.1 节 中 对 Simulink 的 求 解 器 进 行 了 较 为 深 入 的 介 绍 。 Simulink求解器固然是系统仿真的核心,但Simulink对 动态系统求解仿真的控制流程也是非常关键的。 Simulink对系统仿真的控制是通过系统模型与求解器之 间建立对话的方式进行的:Simulink将系统模型、模块 参数与系统方程传递给Simulink的求解器,而求解器将 计算出的系统状态与仿真时间通过Simulink环境传递给 系统模型本身,通过这样的交互作用方式来完成动态系 统的仿真。
>> semilogy(tout(1:end–1,diff(tout)) % 绘制系统仿真时刻的一阶差分(即系统仿真步长),如
图6.7所示,其中常规步长为0.2 s, % 当发生过零的情况时,系统仿真步长自动缩小至约s
simulink常用模块

SIMILIN K模块库按功能进行分为以下8类子库:(1)Continu ous(连续模块)(2)Discret e(离散模块)(3)Functio n&Tables(函数和平台模块)(4)Math(数学模块)(5)Nonline ar(非线性模块)(6)Signals&Systems(信号和系统模块)(7)Sinks(接收器模块)(8)Sources(输入源模块)连续模块(Continu ous)continu ous.mdlIntegra tor:输入信号积分Derivat ive:输入信号微分State-Space:线性状态空间系统模型Transfe r-Fcn:线性传递函数模型Zero-Pole:以零极点表示的传递函数模型Memory:存储上一时刻的状态值Transpo rtDela y:输入信号延时一个固定时间再输出Variabl eTrans portDe lay:输入信号延时一个可变时间再输出离散模块(Discret e)discret e.mdlDiscret e-timeInt egrato r:离散时间积分器Discret eFilte r:IIR与FIR滤波器Discret eState-Space:离散状态空间系统模型Discret eTrans fer-Fcn:离散传递函数模型Discret eZero-Pole:以零极点表示的离散传递函数模型First-OrderHo ld:一阶采样和保持器Zero-OrderHo ld:零阶采样和保持器UnitDel ay:一个采样周期的延时函数和平台模块(Functio n&Tables)functio n.mdlFcn:用自定义的函数(表达式)进行运算S-Functio n:调用自编的S函数的程序进行运算Look-UpTable:建立输入信号的查询表(线性峰值匹配)Look-UpTable(2-D):建立两个输入信号的查询表(线性峰值匹配)数学模块(Math)math.mdlSum:加减运算Product:乘运算DotProd uct:点乘运算Gain:比例运算MathFun ction:包括指数函数、对数函数、求平方、开根号等常用数学函数Trigono metric Functi on:三角函数,包括正弦、余弦、正切等MinMax:最值运算Abs:取绝对值Sign:符号函数Logical Operat or:逻辑运算Relatio nalOpe rator:关系运算Complex toMagn itude-Angle:由复数输入转为幅值和相角输出Magnitu de-Angleto Comple x:由幅值和相角输入合成复数输出Complex toReal-Imag:由复数输入转为实部和虚部输出Real-ImagtoC omplex:由实部和虚部输入合成复数输出非线性模块(Nonline ar)nonline ar.mdlSaturat ion:饱和输出,让输出超过某一值时能够饱和。
Simulink中连续与离散模型区别OC
Simulink中连续与离散模型的区别matlab/simulink/simpowersystem中连续vs离散!本文中的一些具体数学推导见下面链接:计算机仿真技术1.连续系统vs离散系统连续系统是指系统状态的改变在时间上是连续的,从数学建模的角度来看,可以分为连续时间模型、离散时间模型、混合时间模型。
其实在simpowersystem的库中基本所有模型都属于连续系统,因为其对应的物理世界一般是电机、电源、电力电子器件等等。
离散系统是指系统状态的改变只发生在某些时间点上,而且往往是随机的,比如说某一路口一天的人流量,对离散模型的计算机仿真没有实际意义,只有统计学上的意义,所以在simpowersystem中是没有模型属于离散系统的。
但是在选取模型,以及仿真算法的选择时,常常提到的discrete model、discrete solver、discrete simulate type等等中的离散到底是指什么呢?其实它是指时间上的离散,也就是指离散时间模型。
下文中提到的连续就是指时间上的连续,连续模型就是指连续时间模型。
离散就是指时间上的离散,离散模型就是指离散时间模型,而在物理世界中他们都同属于连续系统。
为什么要将一个连续模型离散化呢?主要是是从系统的数学模型来考虑的,前者是用微分方程来建模的,而后者是用差分方程来建模的,并且差分方程更适合计算机计算,并且前者的仿真算法(simulationsolver)用的是数值积分的方法,而后者则是采用差分方程的状态更新离散算法。
在simpowersystem库中,对某些物理器件,既给出的它的连续模型,也给出了它的离散模型,例如:离散模型一个很重要的参数就是采样时间sampletime,如何从数学建模的角度将一个连续模型离散化,后面会有介绍。
在simpowersystem中常用powergui这个工具来将系统中的连续模型离散以便采用discrete算法便于计算机计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Simulink中连续与离散模型的区别matlab/simulink/simpowersystem中连续vs离散!本文中的一些具体数学推导见下面链接:计算机仿真技术1.连续系统vs离散系统连续系统是指系统状态的改变在时间上是连续的,从数学建模的角度来看,可以分为连续时间模型、离散时间模型、混合时间模型。
其实在simpowersystem的库中基本所有模型都属于连续系统,因为其对应的物理世界一般是电机、电源、电力电子器件等等。
离散系统是指系统状态的改变只发生在某些时间点上,而且往往是随机的,比如说某一路口一天的人流量,对离散模型的计算机仿真没有实际意义,只有统计学上的意义,所以在simpowersystem中是没有模型属于离散系统的。
但是在选取模型,以及仿真算法的选择时,常常提到的discrete model、discrete solver、discrete simulate type等等中的离散到底是指什么呢?其实它是指时间上的离散,也就是指离散时间模型。
下文中提到的连续就是指时间上的连续,连续模型就是指连续时间模型。
离散就是指时间上的离散,离散模型就是指离散时间模型,而在物理世界中他们都同属于连续系统。
为什么要将一个连续模型离散化呢?主要是是从系统的数学模型来考虑的,前者是用微分方程来建模的,而后者是用差分方程来建模的,并且差分方程更适合计算机计算,并且前者的仿真算法(simulationsolver)用的是数值积分的方法,而后者则是采用差分方程的状态更新离散算法。
在simpowersystem库中,对某些物理器件,既给出的它的连续模型,也给出了它的离散模型,例如:离散模型一个很重要的参数就是采样时间sampletime,如何从数学建模的角度将一个连续模型离散化,后面会有介绍。
在simpowersystem中常用powergui这个工具来将系统中的连续模型离散以便采用discrete算法便于计算机计算。
QQ截图20130914190906.png (69.79 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:09 上传2.连续模型的数学建模vs离散模型的数学建模Note:这里的连续和离散都是指时间上的连续和离散,无关乎现实世界的连续系统和离散系统。
所谓数学建模就是用什么样的数学语言来描述模型,连续系统的数学模型通常可以用以下几种形式表示:微分方程、传递函数、状态空间表达式,这三中形式是可以相互转换的,其中又以状态空间表达式最有利于计算机计算。
①微分方程:一个连续系统可以表示成高阶微分方程,即QQ截图20130914190955.png (19.33 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:10 上传②传递函数上式两边取拉普拉斯变换,假设y 及u 的各阶导数(包括零阶)的初值均为零,则有QQ截图20130914191024.png (17.29 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:10 上传于是便得微分方程的传递函数描述形式如下:QQ截图20130914191031.png (9.03 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:11 上传③状态空间表达式线性定常系统的状态空间表达式包括下列两个矩阵方程:QQ截图20130914191121.png (2.5 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:11 上传(7-1)QQ截图20130914191127.png (2.94 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:11 上传(7-2)式(7-1)由n 个一阶微分方程组成,称为状态方程;式(7-2)由l个线性代方程组称为输出方程因此获得如下的状态方程与输出方程(令a0=1 ):QQ截图20130914191222.png (27.38 KB, 下载次数: 2)下载附件保存到相册2013-9-14 19:12 上传离散模型假定一个系统的输入量、输出量及其内部状态量是时间的离散函数,即为一个时间序列:捕获.JPG (9.81 KB, 下载次数: 6)下载附件保存到相册2013-9-14 17:50 上传,其中T为离散时间间隔,其实T也就是上文中的sample time。
Note:再强调一次,这里的离散模型是指离散时间模型,与现实世界中的离散事件模型没有任何关系,在simpowersystem中所讲的离散都是指时间上的离散,与我们在信号中学的那个离散概念没有关系。
离散时间模型有差分方程、离散传递函数、权序列、离散状态空间模型等形式。
①差分方程差分方程的一般表达式为:QQ截图20130914191256.png (5.31 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:13 上传同样差分方程可以转换成后面那些表达形式。
3.连续模型的离散化正如7.1.连续系统vs离散系统中截图所示的那样,如何由一个连续模型得到它的离散模型,(RMS®discrete RMS value),以及powergui是通过什么方法将连续模型离散化的,即simulator是如何将微分方程转换成差分方程的。
假设连续系统的状态方程为捕获.JPG (8.54 KB, 下载次数: 6)下载附件保存到相册2013-9-14 17:52 上传现在人为地在系统的输入及输出端加上采样开关,同时为了使输入信号复员为原来的信号,在输入端还要加一个保持器,如图所示。
现假定它为零阶保持器,即假定输入向量的所有分量在任意两个依次相连的采样瞬时为常值,比如,对第n个采样周期u(t)=u(nt),其中T 为采样间隔。
QQ截图20130914191337.png (21.82 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:13 上传由采样定理可知,当采样频率ws和信号最大频率wmax满足ws>2wmax的条件时,可由采样后的信号唯一地确定原始信号。
把采样后的离散信号通过一个低通滤波器,即可实现信号的重构。
值得注意的是,图所示的采样器和保持器实际上是不存在的,而是为了将式离散化而虚构的。
下面对上式进行求解,对方程式两边进行拉普拉斯变换,得即QQ截图20130914175433.png (1.54 KB, 下载次数: 6)下载附件保存到相册2013-9-14 17:55 上传通过一系列的拉斯反变换和卷积,最终得到其差分方程(具体过程不用关心)QQ截图20130914175543.png (43.82 KB, 下载次数: 6)下载附件保存到相册2013-9-14 17:56 上传QQ截图20130914191427.png (2.97 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:15 上传统称为系统的离散系数矩阵。
在转换过程中引入了一个重要参数T,即采样间隔,也就是采样时间,不管是powergui还是其他离散模型,只要涉及到离散,都必然会涉及到sample time,如下图QQ截图20130914191439.png (34.78 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:15 上传那么sample time 一般取多大呢,一直满足采样定理即可,即信号的采样频率大于信号本身最大频率的2倍即可。
4. simulator连续模型的仿真算法(simulatesolver,也可译成仿真解算器)和步长的概念。
QQ截图20130914191629.png (28.07 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:16 上传连续系统的计算机仿真算法是数值积分法,即计算机用数值积分来解微分方程,从而得到其近似解。
具体方法如下①欧拉法和改进的欧拉法:现有微分方程如下:QQ截图20130914191456.png (7.06 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:15 上传上式右端的积分,计算机是无法求出的,其几何意义为曲线f(t,y)在区间(ti ,ti+1)上的面积。
当(ti ,ti+1)充分小时,可用矩形面积来近似代替:QQ截图20130914191712.png (3.1 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:17 上传其中h即为积分步长。
Note:在simulator仿真计算时,h实际为仿真时间间隔。
因此可得下式:QQ截图20130914191718.png (2.86 KB, 下载次数: 1)下载附件保存到相册2013-9-14 19:17 上传因此只要知道当前状态和步长,便可得到下一状态。
其几何意义如下:QQ截图20130914175806.png (2.41 KB, 下载次数: 6)下载附件保存到相册2013-9-14 17:58 上传分析其误差特性:由泰勒展式可得:QQ截图20130914175830.png (1.91 KB, 下载次数: 6)下载附件保存到相册2013-9-14 17:58 上传可知其截断误差QQ截图20130914175906.png (1003 Bytes, 下载次数: 6)下载附件保存到相册2013-9-14 17:59 上传是和步长h2成正比的,因此计算机在计算时,若要使近似积分精度更高,就要减小步长,但会增加截断误差。
②改进的欧拉法(预测—校正法)对积分公式(3.1.2)式利用梯形面积公式计算其右端积分,得到QQ截图20130914175957.png (1.4 KB, 下载次数: 6)下载附件保存到相册2013-9-14 18:00 上传将上式写成递推差分格式为:QQ截图20130914180026.png (992 Bytes, 下载次数: 6)下载附件保存到相册2013-9-14 18:01 上传从上式可以看出,在计算yn+1中,需要知道fn+1,而fn+1=f(tn+1,fn+1)又依赖于yn+1本身。
因此要首先利用欧拉法计算每一个预估的ypn+1,以此值代入原方程式计算fpn+1,最后利用下式求修正后的ypn+1。
所以改进的欧拉法可描述为image098.jpg (5.1 KB, 下载次数: 6)下载附件保存到相册2013-9-14 17:39 上传③龙格—库塔法(rung-kuta)欧拉法是将image099.jpg (14.94 KB, 下载次数: 6)下载附件保存到相册2013-9-14 17:39 上传经泰勒级数展开并截去h2以后各项得到的一阶一步法,所以精度较低。
如果将展开式多取几项以后截断,就得到精度较高的高阶数值解,但直接使用泰勒级数展开式要计算函数的高阶导数较难。