Z变换-反变换求系统响应及稳定性判断
信号与系统期末试卷-含答案全

一.填空题(本大题共10空,每空2分,共20分。
) 1.()*(2)k k εδ-= (2)k ε- 。
2.sin()()2td πτδττ-∞+=⎰()u t 。
3. 已知信号的拉普拉斯变换为1s a-,若实数a a >0 或 大于零 ,则信号的傅里叶变换不存在.4. ()()()t h t f t y *=,则()=t y 2 ()()t h t f 222* .5. 根据Parseval 能量守恒定律,计算⎰∞∞-=dt t t 2)sin (π 。
注解: 由于)(sin 2ωπg t t⇔,根据Parseval 能量守恒定律,可得πωππωωππ===⎪⎭⎫⎝⎛⎰⎰⎰-∞∞-∞∞-d d g dt t t 11222221)(21sin6. 若)(t f 最高角频率为m ω,则对)2()4()(tf t f t y =取样,其频谱不混迭的最大间隔是 m T ωπωπ34max max ==注解:信号)(t f 的最高角频率为m ω,根据傅立叶变换的展缩特性可得信号)4/(t f 的最高角 频率为4/m ω,信号)2/(t f 的最高角频率为2/m ω。
根据傅立叶变换的乘积特性,两信号时域相乘,其频谱为该两信号频谱的卷积,故)2/()4/(t f t f 的最高角频率为m mmωωωω4324max =+=根据时域抽样定理可知,对信号)2/()4/(t f t f 取样时,其频谱不混迭的最大抽样间隔m axT 为mT ωπωπ34max max ==7. 某因果线性非时变(LTI )系统,输入)()(t t f ε=时,输出为:)1()()(t t e t y t--+=-εε;则)2()1()(---=t t t f εε时,输出)(t y f =)1()2()()1()2()1(t t e t t e t t -----+-----εεεε。
8. 已知某因果连续LTI 系统)(s H 全部极点均位于s 左半平面,则∞→t t h )(的值为0 。
信号与系统 z变换

信号与系统 z变换信号与系统是电子信息学科中的一门重要课程,其中的z变换是信号与系统分析的一种重要工具。
本文将介绍信号与系统中的z变换原理及应用。
一、z变换原理z变换是一种离散域的数学变换,它将离散时间序列转换为复平面上的函数。
在信号与系统中,我们常常需要对信号进行分析和处理,而z变换提供了一种方便且有效的方式。
它将离散时间序列变换为z域函数,从而可以对信号进行频域分析。
z变换的定义是:X(z) = ∑[x(n)·z^(-n)],其中x(n)为离散时间序列,z为复变量。
通过z变换,我们可以将离散时间序列的差分方程转化为代数方程,从而简化信号与系统的分析和计算。
此外,z变换还具有线性性质和时移性质,使得我们可以方便地进行信号的加权叠加和时间偏移操作。
二、z变换的应用1. 系统的频域分析:z变换将离散时间序列转换为z域函数,可以方便地进行频域分析。
通过计算系统的传递函数在z域中的值,我们可以得到系统的频率响应,从而了解系统对不同频率信号的响应特性。
2. 系统的稳定性判断:通过z变换,可以将系统的差分方程转化为代数方程。
我们可以通过分析代数方程的根的位置,判断系统的稳定性。
如果差分方程的根都在单位圆内,说明系统是稳定的。
3. 离散时间系统的滤波设计:z变换为我们提供了一种方便的方法来设计离散时间系统的滤波器。
通过在z域中对滤波器的传递函数进行分析和调整,我们可以设计出满足特定需求的滤波器。
4. 信号的采样与重构:在数字信号处理中,我们常常需要对连续时间信号进行采样和重构。
通过z变换,我们可以将连续时间信号转换为离散时间信号,并在z域中进行处理。
然后再通过z逆变换将离散时间信号重构为连续时间信号。
5. 离散时间系统的时域分析:z变换不仅可以进行频域分析,还可以进行时域分析。
通过z变换,我们可以将离散时间系统的差分方程转换为代数方程,并通过对代数方程的分析,得到系统的时域特性。
z变换是信号与系统分析中非常重要的工具。
ch1_4双边Z变换与反变换

(1)有限长序列
X ( z)
k N1
N2
x[k ]z -k
ROC
0< z <
1 0 k N - 1 例:x[k ] RN [k ] 0 其它
X ( z)
k 0
N -1
1- z-N z -k 1 - z -1
z 0
(有限长序列的z变换没有收敛域的限制)
X ( z)
k -
x[k ]z -k ROC
R- < z < R
例:x[k ] a k u[k ] - b k u[-k - 1]
1 1 X ( z) -1 1 - az 1 - bz -1
a<z<b
Im(z)
必须在|b||a|的条件下,序列的z变换
才存在。
z变换
a
b
Re(z)
三、双边z变换的主要性质
x1[k ] X1 ( z)
x2 [k ] X 2 ( z)
1.线性特性
ROC Rx {z; Rx < z < Rx }
1 11
ROC Rx {z; Rx < z < Rx }
2 22
ax1[k ] bx2[k ] aX1 ( z) bX2 ( z)
x[k ]z -k
ROC
z < R
例:x[k ] -b k u[-k - 1]
X ( z)
k -
-1
- b k z -k
-k k
k 1
- b -k z k
Im(z)
1- b z
k 0
信号与系统考试试题及答案

长沙理工大学拟题纸课程编号 1 拟题教研室(或老师)签名 教研室主任签名 符号说明:)sgn(t 为符号函数,)(t δ为单位冲击信号,)(k δ为单位脉冲序列,)(t ε为单位阶跃信号,)(k ε为单位阶跃序列。
一、填空(共30分,每小题3分)1. 已知)()4()(2t t t f ε+=,求_______)("=t f 。
)('4)(2)("t t t f δε+2. 已知}4,2,4,3{)(},1,2,2,1{)(=-=k h k f ,求______)()(=*k h k f 。
}4,6,8,3,4,10,3{)()(-=*k h k f3. 信号通过系统不失真的条件为系统函数_______)(=ωj H 。
0)(t j Ke j H ωω-=4. 若)(t f 最高角频率为m ω,则对)4(t f 取样的最大间隔是______。
m T ωπωπ4max max == 5.信号t t t f ππ30cos 220cos 4)(+=的平均功率为______。
101122222=+++==∑∞-∞=n n F P6. 已知一系统的输入输出关系为)3()(t f t y =,试判断该系统是否为线性时不变系统______。
故系统为线性时变系统。
7. 已知信号的拉式变换为)1)(1(1)(2-+=s s s F ,求该信号的傅立叶变换)(ωj F =______。
故傅立叶变换)(ωj F 不存在。
8. 已知一离散时间系统的系统函数2121)(---+=z z z H ,判断该系统是否稳定______。
故系统不稳定。
9. =+-+⎰∞∞-dt t t t )1()2(2δ______。
310. 已知一信号频谱可写为)(,)()(3ωωωωA e A j F j -=是一实偶函数,试问)(t f 有何种对称性______。
关于t=3的偶对称的实信号。
二、计算题(共50分,每小题10分)1. 已知连续时间系统的单位冲激响应)(t h 与激励信号)(t f 的波形如图A-1所示,试由时域求解该系统的零状态响应)(t y ,画出)(t y 的波形。
程佩青《数字信号处理教程》(第4版)(名校考研真题详解 Z变换与离散时间傅里叶变换(DTFT))
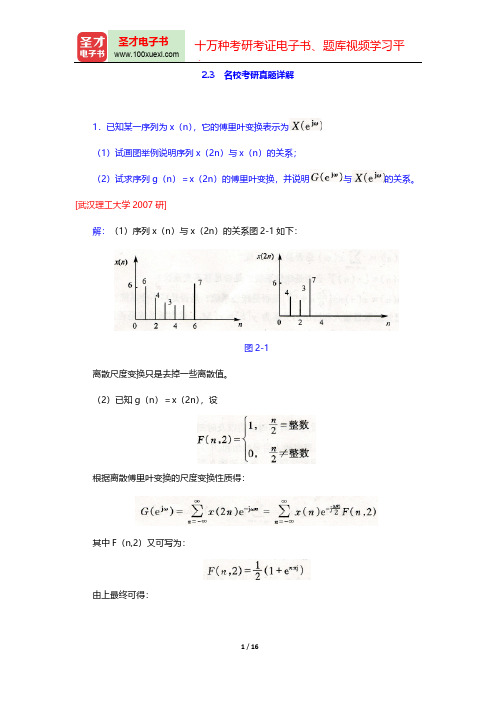
2.3 名校考研真题详解1.已知某一序列为x (n ),它的傅里叶变换表示为(1)试画图举例说明序列x (2n )与x (n )的关系;(2)试求序列g (n )=x (2n )的傅里叶变换,并说明与的关系。
[武汉理工大学2007研]解:(1)序列x(n )与x (2n )的关系图2-1如下:图2-1离散尺度变换只是去掉一些离散值。
(2)已知g(n )=x (2n ),设根据离散傅里叶变换的尺度变换性质得:其中F (n,2)又可写为:由上最终可得:2.已知x[k]的傅里叶变换,用表示信号)(Ωj e H )(Ωj e H的傅里叶变换。
[北京交通大学2006研]解:已知x[k]的傅里叶变换,且)(Ωj e H 根据已知所以对y[k]进行傅里叶变换得:3.线性时不变系统的输入为输出为。
(1)求系统的单位抽样响应;(2)判断系统的稳定性和因果性,并说明理由。
[华东理工大学2004研]解:(1)由Z 变换定义直接得:同理,y (n )的Z 变换为:所以系统函数为:对H(z)求Z逆变换得对应抽样响应为:(2)由(1)知系统收敛域为3/4,包括单位圆和无穷远点,所以既是稳定的又是因果的。
4.若。
请借助线性卷积与Z变换的定义,证明:时域卷积对应子Z域乘积,即。
[南京邮电大学2000研]证明:由线性卷积与Z变换的定义知:即5.序列x(n)的自相关序列c(n)定义为试以x(n)的Z变换表示c(n)的Z变换。
[北京理工大学2007研]解:c(n)可以转化为:根据Z变换的对称性得:6.已知离散序列试求x(n)的Z变换X(z),确定其收敛域,并画出X(z)的零极点图。
[东南大学2007研]解:由Z变换定义可得:可能的零点为,其中;显然k=0时的零点和极点相互抵消了,所以该Z变换在z=0处有(N-1)阶极点,零点为:,其中,对应的收敛域为时的零极点图如下图2-2所示:图2-27.求的Z反变换。
[中国地质大学(北京)2006研]解:原式可化解为:由于收敛域,故:8.已知序列的双边Z变换为:解:根据由部分分式展开法,可得:可能对应以下序列:① 当收敛域为∣z∣>0.5时:② 当收敛域为0.25<∣z∣<0.5时:③ 当收敛域为∣z∣<0.25时:9.一个线性时不变因果系统由下列差分方程描述。
典型二阶系统的z变换

典型二阶系统的z变换在控制系统中,典型的二阶系统是一种常见的模型,用于描述许多实际系统的动态行为。
这些系统可以是机械系统、电子系统或者其他各种物理系统。
为了研究和分析这些系统的性质,我们可以使用z变换来进行数学建模和计算。
z变换是一种广泛应用于信号处理和控制系统的数学工具。
它将离散时间信号转换为复平面上的复变量函数,从而方便地分析和处理系统的动态特性。
对于典型的二阶系统,我们可以使用z变换来建立其传递函数,进而分析其频率响应、稳定性和动态性能。
在二阶系统中,通常有两个输入和两个输出。
输入可以是系统的控制信号,输出可以是系统的响应或者输出信号。
二阶系统的动态特性主要由其传递函数决定。
传递函数是输入和输出之间的数学关系,它描述了系统对不同频率的输入信号的响应情况。
典型的二阶系统的传递函数可以表示为:H(z) = (b0 + b1z^(-1) + b2z^(-2))/(1 + a1z^(-1) + a2z^(-2))其中,b0、b1、b2、a1和a2是系统的系数,代表了系统的特性。
通过对传递函数进行z变换,我们可以得到系统的差分方程,从而可以分析系统的稳定性和动态响应。
在进行二阶系统的z变换分析时,我们通常关注以下几个方面:1. 频率响应:通过将z变换的变量替换为复平面上的点,我们可以绘制系统的频率响应曲线。
频率响应曲线可以帮助我们了解系统对不同频率的输入信号的响应情况,从而可以设计合适的控制策略。
2. 稳定性:通过分析传递函数的极点位置,我们可以确定系统的稳定性。
如果系统的极点都位于单位圆内部,那么系统是稳定的。
如果存在极点位于单位圆上或外部,那么系统是不稳定的。
3. 零点和极点:零点和极点是传递函数的根,它们决定了系统的频率响应和动态特性。
通过分析零点和极点的位置,我们可以了解系统的阻尼比、自然频率和共振峰的情况。
4. 动态响应:通过求解差分方程,我们可以得到系统的时域响应。
时域响应表示系统对不同输入信号的实际输出情况。
ch14双边z变换与反变换

若信号序列为x(n),其双边z变换为X(z) = ∑_{n=-infty}^{+infty} x(n)z^{-n}。
双边z变换的性质
线性性质
若x1(n)和x2(n)的z变换分别为 X1(z)和X2(z),则对于任意常数a 和b,有aX1(z) + bX2(z)的z变换 等于a*X1(z) + b*X2(z)。
分类
收敛域可分为两类,一类是绝对收敛 域,另一类是条件收敛域。
条件收敛域
在条件收敛域内,只有在满足特定条 件下,双边z变换才存在且收敛。
02 双边z反变换的定义与性 质
双边z反变换的定义
01
定义
双边z反变换是通过对双边z变换 的逆过程,将z域的函数转换为 时域的函数。
02
03
公式
意义
双边z反变换的公式为 (x(n) = frac{1}{2pi j}int_{C_0} X(z) z^{n}dz)
时移性质
若x(n)的z变换为X(z),则x(n-d) 的z变换为X(z*z^d)。
频移性质
若x(n)的z变换为X(z),则x[n*a] 的z变换为X(z/a^2)。
双边z变换的收敛域
收敛域
双边z变换的收敛域是指能使双边z变换 存在的z值范围,通常由极点、留数和
奇点决定。
绝对收敛域
在绝对收敛域内,无论z取何值,双 边z变换都存在且收敛。
在实现控制算法时,双边z变换可以用于离散化连续时间 系统,将连续时间系统转化为离散时间系统进行计算和控 制。
在信号处理中的应用
01
信号滤波和处理
双边z变换可以用于信号滤波和处理,通过设计滤波器函数并进行双边z
变换,可以实现信号的降噪、增强和特征提取等处理。
《自动控制原理》z变换与z反变换

《自动控制原理》z变换与z反变换自动控制原理是一门研究系统动态特性与控制方法的学科,其中涉及到了很多数学工具和方法,其中之一就是z变换和z反变换。
本文将对z 变换和z反变换进行详细的解释和介绍。
z变换是一种非常重要的数学工具,它是离散时间信号和系统分析中的一种常用方法。
z变换的定义如下:X(z)=Z[x(n)]=∑[x(n)*z^(-n)]其中,x(n)为离散时间信号,X(z)为z变换后的结果,z为变量。
z变换可以将离散时间信号从时域转换到z域,从而可以更方便地进行分析和处理。
z变换可以将离散时间信号表示为有理函数的形式,从而可以用于求解离散时间系统的频率响应、系统稳定性等问题。
z变换的性质有很多,这里只介绍其中几个重要的性质。
首先是线性性质,即线性系统的z变换可以表示为输入信号和系统冲激响应的z变换的乘积。
其次是时移性质,即输入信号的z变换与输入信号z变换乘以z^(-n)的结果相等。
最后是共轭对称性质,即输入信号为实数序列时,其z变换的共轭对称性质。
在进行z变换的计算时,可以使用z变换的表格、z变换的性质以及z变换的逆变换来简化计算。
z变换的逆变换可以将z域的信号重新转换回时域的信号,其定义如下:x(n) = Z^(-1)[X(z)] = (1/2πj) * ∮[X(z) * z^(n-1) * dz]其中,X(z)为z变换的结果,x(n)为z变换的逆变换结果。
z反变换可以将z域的信号转换为时域的信号,从而可以得到离散时间信号的具体数值。
z变换和z反变换在自动控制领域中有着广泛的应用。
例如,在系统建模和分析中,可以通过z变换将离散时间系统转换为z域的传递函数,从而可以方便地进行系统分析和控制器设计。
此外,在数字滤波器设计中,z变换也是一种常用的工具,可以将滤波器的差分方程转换为z域的传递函数,从而可以设计出满足要求的数字滤波器。
总结起来,z变换和z反变换是自动控制原理中的重要数学工具,可以方便地进行离散时间信号和系统的分析和处理。
《数字信号处理》试题解答

测控2007级《数字信号处理》试题(A)解 答一、(12分)已知一信号的最高频率分量的频率1000m f H z =,若采用FFT 算法作频谱分析,且频率分辨率50f Hz ∆≤,试确定:⑴ 信号的采集时间长度T 1; ⑵ 信号的采样间隔T 2;⑶ 信号的采样点数N 1; ⑷ 频率分辨率提高一倍的采样点数N 2。
解: ⑴ 由分辨率的要求确定信号的采集时间长度:1110.022050T s ms f≥===∆⑵ 信号的采样间隔应满足: 23110.522110mT m s f ≤==⨯⨯⑶ 采样点数应满足: 31221104050m f N f⨯⨯≥==∆⑷ 频率分辨率提高一倍的采样点数应满足: 322211080/225m f N f ⨯⨯≥==∆二、(8分)试判断系统 [()]()()T x n x n x n =+- 是否为:⑴ 线性系统;⑵ 移不变系统;⑶ 因果系统;⑷ 稳定系统。
解:⑴ 满足叠加原理∴ 是线性系统。
⑵∴ 是移变系统。
⑶ 当0n <时,()x n -为未来输入,输出取决于未来输入。
∴ 是非因果系统。
12112212[()()][()()][()()][()][()]T ax n bx n a x n x n b x n x n aT x n bT x n +=+-++-=+[()]()(())()()()()()[()]()T x n m x n m x n m x n m x n m y n m x n m x n m T x n m y n m -=-+--=-+-+-=-+---≠-⑷ (),x n M ≤<∞ 若则有()()()()2x n x n x n x n M +-≤+-≤<∞∴ 是稳定系统。
三、(15分)已知LSI 离散时间系统的单位抽样响应为:⑴ 求该系统的系统函数)(z H ,并画出零极点分布图; ⑵ 写出该系统的差分方程。
解:⑴ 系统的系统函数)(z H 是其单位抽样响应()h n 的z 变换,因此:11111071113333():111111211242424z zzzzH z RO C z z z z z zz ---⎛⎫+-+⎪⎝⎭=+==>⎛⎫⎛⎫⎛⎫⎛⎫------ ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭⎝⎭⎝⎭零点:1,03z =-极点:11,24z =零极点分布图:()10171()3234n n h n u n ⎡⎤⎛⎫⎛⎫=-⎢⎥ ⎪ ⎪⎝⎭⎝⎭⎢⎥⎣⎦⑵ 由于()1112111111()333111()1114824zzY z H z X z z zz z ------++===⎛⎫⎛⎫-+-- ⎪ ⎪⎝⎭⎝⎭所以系统的差分方程是311()(1)(2)()(1)483y n y n y n x n x n --+-=+-四、(15分) 已知序列()x n 的z 变换为求其可能对应的几种不同ROC 的z 反变换。
Z变换及逆变换与-稳定性
数字信号处理课程设计课程名称数字信号处理题目名称Z变换与逆变换与稳定性专业班级电子信息(12)学生XX学号指导教师二○××年××月××日Z变换-反变换求系统响应与稳定性判断引言 (1)数字信号处理 (2)MATLAB (2)GUI (2)课题相关 (2)设计要求 (1)理论知识 (1)离散时间系统 (2)Z变换 (2)数字信号处理 (2)离散时间系统的频域分析 (2)系统函数 (6)因果性和稳定在Z域的描述 (6)系统函数的零极点位置 (6)MATLAB仿真 (1)M脚本涉与函数 (2)GUI控件介绍 (2)常用控件 (6)控件的公共属性 (6)程序实现 (1)稳定系统I (5)稳定系统II (5)非稳定系统 (5)致谢 (1)参考文献 (4)附录 (1)1 引言1.1 数字信号处理数字信号处理就是用数值计算的方式对信号进行加工的理论和技术,它的英文原名叫digital signal processing,简称DSP。
另外DSP也是digital signal processor的简称,即数字信号处理器,它是集成专用计算机的一种芯片,只有一枚硬币那么大。
有时人们也将DSP看作是一门应用技术,称为DSP技术与应用。
数字信号处理是将信号以数字方式表示并处理的理论和技术。
数字信号处理与模拟信号处理是信号处理的子集。
数字信号处理的目的是对真实世界的连续模拟信号进行测量或滤波。
因此在进行数字信号处理之前需要将信号从模拟域转换到数字域,这通常通过模数转换器实现。
而数字信号处理的输出经常也要变换到模拟域,这是通过数模转换器实现的。
1.2 MATLABMATLAB是美国MathWorks公司出品的商业数学软件,用于算法开发、数据可视化、数据分析以与数值计算的高级技术计算语言和交互式环境,主要包括MATLAB和Simulink两大部分。
MATLAB是matrix&laboratory两个词的组合,意为矩阵工厂(矩阵实验室)。
东电考研大纲841、842、843、844、845、846
(1)841 自动控制原理一、考试形式与试卷结构1、试卷满分及考试时间试卷满分为150分,考试时间为180分钟2、考试方式考试方式为闭卷、笔试3、试卷的题型结构选择填空题,分析计算题,综合设计题二、考察的知识及范围第一章自动控制系统导论内容:(1)自动控制系统的一般性概念和基本工作原理;(2)反馈控制系统的基本组成、分类及对控制系统的基本要求;(3)《自动控制原理》课程研究的主要内容及其发展现状。
重点掌握:自动控制系统的一般性概念和基本工作原理;反馈控制系统的基本组成、分类及对控制系统的基本要求第二章控制系统的数学模型内容:(1)复数和复变函数的基本概念,拉普拉斯变换和拉普拉斯反变换;(2)控制系统研究中几种主要数学模型:微分方程、传递函数和频率特性的内在联系;(3)典型环节的数学模型;(4)常见电气系统和一般机械系统的数学建模;(5)方块图的化简法则;(6)利用梅逊公式求取系统的传递函数。
重点掌握:传递函数的概念、结构图的建立与等效变换、梅逊公式第三章自动控制系统的时域分析内容:(1)系统阶跃响应性能指标;(2)一阶、二阶系统阶跃响应的特点及一阶、二阶系统动态性能;(3)高阶系统动态性能(4)线性系统稳定的充要条件;(5)利用劳斯判剧判别系统的稳定性;(6)稳态误差的定义;(7)稳态误差系数的求取及减小或消除系统稳态误差的方法;重点掌握:稳定性、稳态误差、系统阶跃响应的特点及动态性能与系统参数间的关系等有关概念,有关的计算方法。
第四章根轨迹法内容:(1)根轨迹的定义、幅值和相角条件;(2)根轨迹的绘制法则;(3)利用根轨迹分析系统的特性。
重点掌握:根轨迹的绘制方法,利用根轨迹分析系统的特性。
第五章线性系统的频域分析法内容:(1)频率特性的定义、求法及性质;(2)线性系统极坐标图画法;Nyquist图稳定判据的应用;(3)线性系统伯德图的画法;最小相位系统的定义及性质;(4)利用Bode图求取系统稳态误差;增益裕量和相位裕量的定义、物理意义和求取;重点掌握:正确理解频率响应、频率特性的概念及特点,明确频率特性的物理意义;熟练掌握运用奈奎斯特稳定判据和对数频率判据判定系统稳定性的方法;熟练掌握计算稳定裕度的方法。
离散控制系统及Z变换(补充)
t s(settling
系统的动态特性( 2、系统的动态特性(dynamic
character)
K T 若对象为 G p (s) = ,一般取 T = 0.1 0 T0 s +1 T 若对象为 Ke−τs , = (1.2 ~ 0.35)τ ,0.1 ≤ τ T 0≤ 1 G p (s) = T0 s +1 T = (0.35 ~ 0.22)τ ,1 ≤ τ T 0≤ 10
+∞
f * (t) = ∑ f (nT)δ (t − nT)
n=0
对上式两边取拉氏变换, 对上式两边取拉氏变换,令 F(s) = L[ f * (t)] 则
F(s) = ∑L[ f (t)] = ∑ f (nT)L[δ (t − nT)] = ∑ f (nT)e
* n=0 n=0 n=0 +∞ +∞ +∞ −nTs
终值定理( 5、终值定理(finial value theorem)
f (∞) = lim f * (t) = lim f (nT) = lim (1− z −1)F(z) = lim (z −1)F(z)
t→∞ n→∞ z→ 1 z→ 1
1
0
h0 (t) =1(t) −1(t −T)
T
t
三、 数字控制系统中采样周期T的确定 数字控制系统中采样周期T
(采样周期:sampling period) 采样周期:sampling
1、理论依据
香农采样定理: 香农采样定理:为了使采样信号能不失真的反映连续 的变化规律, 信号 f (t) 的变化规律,采样频率 f 至少应该是 f (t) 频谱 的两倍, 的最高频率 fmax的两倍,即
宽度为0的脉冲量, 宽度为0的脉冲量,图形表示 如右, 如右,
信号与系统第六章Z变换

差分方程的稳定性分析
01
稳定性定义
02
稳定性判据
如果一个离散时间系统在输入信号的 作用下,其输出信号不会无限增长, 则称该系统是稳定的。
对于差分方程,可以通过判断其极点 位置和类型来分析系统的稳定性。如 果所有极点都位于复平面的左半部分 ,则系统是稳定的;否则,系统是不 稳定的。
03
稳定性分析的意义
反转性质在通信和控制系统设计中非常有用,因为它允 许我们通过改变信号的方向来改变系统的性能。
卷积性质
卷积性质描述了z变换的卷积特性。如 果两个信号在时间上相乘,那么它们 的z变换就是它们的卷积。
卷积性质在信号处理中非常重要,因 为它允许我们通过将两个信号相乘来 得到一个新的信号。
复共轭性质
复共轭性质描述了z变换的复共轭特性。如果一个信号是实数,那么其z变换就是其复共轭的离散化表 示。
信号与系统第六章z 变换
目录
CONTENTS
• 引言 • z变换的收敛域 • z变换的性质和应用 • z变换与离散时间系统 • z变换与差分方程 • z变换与信号处理
01
引言
背景介绍
ห้องสมุดไป่ตู้
信号与系统是通信、电子、控制等领 域的重要基础课程,其中第六章z变换 是信号与系统中的重要章节之一。
z变换是离散时间信号处理中的一种数 学工具,用于分析离散时间信号和系 统的性质和行为。
离散信号的z变换
离散信号的z变换是将离散时间序列通过z变 换转换为复数序列,用于分析离散时间系统 的特性。
系统的频率响应和极点零点分析
01
系统的频率响应
02
系统的极点和零点
03
系统稳定性分析
通过z变换分析系统的频率响应, 了解系统在不同频率下的性能表 现。
实验Z变换、零极点分析

实验Z变换、零极点分析1. 学会运⽤MATLAB 求离散时间信号的z 变换和z 反变换;⼀、实验原理及实例分析(⼀)离散时间信号的Z 变换1.利⽤MATLAB 实现z 域的部分分式展开式MATLAB 的信号处理⼯具箱提供了⼀个对F(Z)进⾏部分分式展开的函数residuez(),其调⽤形式为:[r,p,k]=residuez(num,den)式中,num 和den 分别为F(Z)的分⼦多项式和分母多项式的系数向量,r 为部分分式的系数向量,p 为极点向量,k 为多项式的系数向量。
【实例1】利⽤MATLAB 计算321431818)(-----+zz z z F 的部分分式展开式。
解:利⽤MATLAB 计算部分分式展开式程序为% 部分分式展开式的实现程序num=[18];den=[18 3 -4 -1];[r,p,k]=residuez(num,den)2.Z 变换和Z 反变换MATLAB 的符号数学⼯具箱提供了计算Z 变换的函数ztrans()和Z 反变换的函数iztrans (),其调⽤形式为)()(F iztrans f f ztrans F ==上⾯两式中,右端的f 和F 分别为时域表⽰式和z 域表⽰式的符号表⽰,可应⽤函数sym 来实现,其调⽤格式为()A sym S =的Z 反变换。
解(1)Z 变换的MATLAB 程序% Z 变换的程序实现f=sym('a^n');F=ztrans(f)程序运⾏结果为:z/a/(z/a-1)可以⽤simplify( )化简得到 :-z/(-z+a)(2)Z 反变换的MATLAB 程序% Z 反变换实现程序F=sym('a*z/(z-a)^2');f=iztrans(F)程序运⾏结果为f =a^n*n(⼆)系统函数的零极点分析1. 系统函数的零极点分布离散时间系统的系统函数定义为系统零状态响应的z 变换与激励的z 变换之⽐,即)()()(z X z Y z H = (3-1)如果系统函数)(z H 的有理函数表⽰式为:11211121)(+-+-++++++++=n n n n m m m m a z a z a z a b z b z b z b z H (3-2)那么,在MATLAB 中系统函数的零极点就可通过函数roots 得到,也可借助函数tf2zp 得到,tf2zp 的语句格式为:[Z,P,K]=tf2zp(B,A)其中,B 与A 分别表⽰)(z H 的分⼦与分母多项式的系数向量。
第8章 z变换离散时间系统的z变换分析

-n -n
收敛域 为 z >1
3. 斜变序列
间接求 解方法 已知 两边对(z -1)求导
两边乘(z -1)
∴
同理,两边再求导,得
…
4. 指数序列
x(n) a n u(n)
运用留数定理来进行运算。又称为留数法,即
f (n) Res[F ( z )z n1 ]z pm
m
略!
二、幂级数展开法(长除法)
F ( z ) f (n)z n f (0) f (1)z 1 f ( 2)z -2
n 0
!
一般为变量z的有理分式,可用长除法,
例
s = 2,
例题 解
求x(n) = ?
∴
∴
见P60~61,表8-2、8-3、8-4(逆z变换表) 作业:P103,8-5 (1)(2)
8.5 z变换的基本性质
一、线性 若 x(n) ←→ X(z) y(n) ←→ Y(z)
则
Rx1 < |z| < Rx2 Ry1 < |z| < Ry2
ax(n) + by(n) ←→ aX(z) + bY(z)
F ( z ) f (0) f (1) z 1 f (2) z 2
所以
f (0) 0, f (1) 1, f (2) 0, f (3) 3, f (4) 4,
重点!
三、部分分式展开法
一般Z变换式是有理函数
以下研究因果序列的逆变换,即
X(z) (|z|>R) ← Z → x(n)
对于N阶LTI离散系统的差分方程:
《信号与系统》第十章Z变换【最经典的奥本海默信号与系统课件,PDF版】

x[ n] z
n
n
a z
n n 1
1
n
a z 1 a z 1 1 1 a z 1 az n 1
1 即 a u[ n 1] 1 1 az
n Z
z a
说明: 1)Z变换由代数表达式和收 敛域组成; 2)例1和例2的零极点图和收 敛域如图所示. 3)如果X(z)的ROC包括单位 圆,则x[n]的DTFT 存在。
3. Z域尺度变换:
X ( z / z0 ) z R 时 X ( z )收敛,故 | z / z0 | R 时,
0
收敛。 j z e z z0 R 当 0 时,即为频移特性。 若 z0是一般复数
0 z0 r0 e j,则 X ( z / z0 )的零极点
不仅要将 X ( z ) 的零极点逆时针旋转一个角 度0 ,而且在径向有 r0 倍的尺度变化。
lim( z 1) X ( z ) Res[ X ( z ),1]
z 1
Z平面上极点位置与信号模式的关系示意图
10.3 Z-反变换
一.Z-反变换:
The Inverse Z-Transform
令
z re
j
dz jre d jzd
j
当ω从0→2π时,z沿着ROC内半径为 r 的圆变化一周。 其中 C 是 ROC 中逆时针 方向的圆周。 二. 反变换的求取: 1. 部分分式展开法: 当X(z)是有理函数时,可将其展开为部分 分式 Ai X (z) 1 1 aiz i
Properties of the Z-transform
Z变换的许多性质与DTFT的性质相似,其 推 论方法也相同。故主要讨论ROC的变化。 1. 线性:
Z变换阶段测试参考答案

1Z 变换阶段测试参考答案一、填空题 1. 序列{}2,5,3,2,1()k f k ↑==,其Z 变换的收敛域为0||z <<∞。
2. (2)u n −的z 变换是1z z a−−。
3. 序列x (n )满足条件|()|n x n ∞=−∞<∞∑,其Z 变换的收敛域为||x x R z R −+<<,则x R −应该满足条件1x R −<,x R +应该满足条件1x R +>。
二、选择题1. 双边Z 变换23()(1)(2)z X z z z =+−,其收敛域为12z <<,则其原序列()x n 等于 CA 、[(1)2(2)]()k k u k −+;B 、[(1)2(2)](1)k k u k −−−−−;C 、2(2)(1)(1)()k k u k u k −−−+−;D 、 [(1)2(2)](1)k k u k −+−−2. 离散LTI 系统的系统函数为110110()m m m m n n n n b z b z b H z a z a z a −−−−+++=+++ ,则系统是因果系统的条件是 DA 、1m n ≥+;B 、 m n ≥;C 、 1m n ≤+;D 、 m n ≤3. 已知)(3)(1n u n x n =,)1(2)(2−−=n u n x n ,则)()(21n x n x +的z 变换为 D :A、3||,)2)(3(2>−−z z z z ; B、2||,)2)(3(1<−−z z z ; C、3||2,)2)(3(<<−−z z z z; D、不存在4. 因果稳定的离散时间系统函数的极点必定在 Da) 单位圆以外; b) 实轴上; c) z 平面左半平面; d) 单位圆以内5. 已知离散时间LTI 系统的系统函数H(z)的收敛域为321<<z ,则该系统一定为: B A、因果稳定系统; B、非因果稳定系统;C 、因果不稳定系统;D 、非因果不稳定系统;26. 设离散时间信号()x n 的Z 变换为)(z X ,另设1(/2)()0 x n n x n n ⎧=⎨⎩,为偶数,为奇数,则1()x n 的Z 变换为 AA 、 2()X z ; B 、 (/2)X z ; C 、 2(/2)X z ; D 、 (/2), 0, X z ⎧⎨⎩单位圆外单位圆内三、简答题1、已知z 变换()()x n X z ↔,试证明1()()x n X z −−↔成立。
数字信号处理(程佩青)_第二章_Z变换
2. z变换的收敛域
一种最重要的右边序列:因果序列——是指在 n≥0时x(n)有值,n<0时x(n)=0的序列。其收敛
序列为:
在|z|=∞处z变换收敛是因果序列的特征。
18
2. z变换的收敛域
因果序列及其收敛域(包括z=∞ )
19
2. z变换的收敛域
(3)左边序列
在 时 有值,在 时 的序列 。其z变换为:
有一个
一阶极点。所以
31
1.围线积分法(留数法)
(2)当n≤-2时:函数 有一个 4 一阶极点。所以 在围线C外只
综合可得:
32
2.部分分式展开法
当X(z)为有理函数时,可以表示成
X(z) 可以展成下面的部分分式形式:
其中zi是X(z)的一个r阶极点 ,zk是X(z)的单极点(k=1,2……N-r),Bn是 整式部分的系数(M≥N时存在,M=N时,只有B0 项;M<N时Bn =0)。
59
任一序列总能表示成一个共轭对称序列与 一个共轭反对称序列之和。
要证明这一点,需要找到xe(n) 和xo(n) ,这 只要令xe(n) 和xo(n)满足下式即可 :
60
同样,一个序列x(n)的傅里叶变换也可以分 解成共轭对称分量与共轭反对称分量之和:
其中 ,是共轭对称的, 轭反对称的。
是共
61
(5)
若已知 X(z) = Z[x(n)] Rx_<|z|<Rx+
则有: Z [ x * (n)] X * ( z * )
(6)
若已知 则有: X(z) = Z[x(n)] Rx_<|z|<Rx+
1 Z [ x(n)] X ( ) z
48
2015年878信号与系统真题及答案详解
【解题思路】
版权所有 翻印必究
举报邮箱:sysukyw08@
考察傅里叶级数的公式以及内容。
【答案】
x(t)
a e
jk ( 2 T )t
k
k
,
x(t) A t(a t a)
,
a
ak
1 T
x(t)e jkw0tdt
T
1a
2a
a
A jk t te a dt
1.
t cos(3t) (1 t)dt
2. 现 有 一 离 散 时 间 的 线 性 时 不 变 系 统 , 当 输 入 x[n] 0.5[n 3] 时 , 系 统 响 应 为
y[n] 0.5n [n 1],求该系统的单位冲激响应。 3. 若 x[n] n([n 1] [n 2]) , h[n] 2([n] [n 3]) , 计 算
d 2t
dt
dt
y' (0 ) 1,请回答下列问题。
(1)求解零输入响应 yzi (t) ,零状态响应 yzs (t) 和全响应 y(t) (2)求解系统函数 H (s) 和单位冲激响应 h(t)
(3)判断系统的稳定性。
(4)若系统初试松弛,且输入信号 x(t) et, t ,请确认此时的系统响应 y(t) 。
(3)判断系统的稳定性。
(4)若系统初试松弛,且输入信号 x(t) et, t ,请确认此时的系统响应 y(t) 。
【解题思路】 考察微分方程的解答以及拉普拉斯变换的性质。
版权所有 翻印必究
举报邮箱:sysukyw08@
【答案】
(1) Y
(s)(s2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录
第 1 章 摘要 ........................................................................................ 1 1 引言 ..................................................................................................... 1 第 2 章 基本原理 ................................................................................ 2 2.1 MATLAB 及数字信号处理............................................................. 2 2.2 Z 变换与 Z 反变换的概念与原理 .................................................. 2 2.3 系统的稳定性 .................................................................................. 8 第 3 章 程序实现及结果分析 ............................................................ 8 学习心得 .............................................................................................. 13
求 统的稳定性。
工 作 量
7 月 5 日:上午:讲课,总体安排,布置设计题目,借阅书籍;
工
下午:阅读文献
作
7 月 6 日: 相关理论学习 方法设计;
计.王娜.信号处理原理及应用. 机械工业出版社,2009 年
参 2. 薛年喜 MATLAB 在数字信号处理中的应用 清华大学出版社 2003 年
2.2 Z 变换与 Z 反变换的概念与原理 2.2.1 Z 变换理论
Z 变换的思想来源于连续系统。线性连续系统的动态性能及稳定性,可以用拉氏变换
的方法来进行分析,与此类似,线性离散系统的性能,可以采用 Z 变换的方法来获得。Z
变换是从拉氏变换直接引申出来的一种变换方法,它实际上是采样函数拉氏变换的变形。
燕山大学
课程设计说明书
题目:Z 变换-反变换求系统响应及稳定性判断
学院(系): 电气工程学院 年级专业: 学 号: 学生姓名: 指导教师: 教师职称:
燕山大学课程设计(论文)任务书
院(系):电气工程学院
基层教学单位:自动化仪表系
学号
学生姓名
专业(班级)
设计题目 Z 变换-反变换求系统响应及稳定性判断
于是
z eTs eT e jT z e j
(7-15) 其中
z eT
T 式(7-15)就是变量 z 以模 z 和幅角 形式表示的复变量。
2. 在 Z 变换过程中,由于考虑的仅是连续时间函数经采样后的离散时间函数,或
者说仅是连续时间函数在采样时刻上的采样值,所以式(7-14)表达的仅是连续时间函
数在采样时刻上的信息,而不反映采样时刻之间的信息,从这个意义上来说,连续时间
函数 f (t) 与相应的离散时间函数 f * (t) 具有相同的 Z 变换,即
Z[ f (t) ]=Z[ f *(t) ]=F(z) (3) Z 变换的求法
1. 级数求和法
设连续时间函数为 f (t) ,对应的离散时间函数为 f *(t) ,将 f *(t) 展开如下
x(n) 1 X (z)zm1dz
2j C
Res X (z)z n1 , n 0
则x(n)
C外极点
Res X (z)z n1
,n 0
C内极点
jIm(z)
Zm
C
Re(z)
C’
当Rx1 z Rx2时,
2.2.则2 x(Zn)反 变C内换极点R理eRse论Xs X(z()zz)nz1n,1n,
f * (t) f (nT ) (t nT ) n0 f (0) (t) f (T ) (t T ) f (2T ) (t 2T ) f (nT) (t nT)
然后逐项进行拉氏变换,得到
F * (s) f (0) f (T )eTs f (nT )enTs
对于X (z)的收敛域z Rx2 ,则函数 X (z)zn1 的极点全部位于
围线C之外, 可设围线C ' , C '与C反方向
X (z) zm1dz
C
C
n0
x(n)
z
n
z m1dz
n0
x(n)
z mn1dz
C
z
C
m1dz
2j, k 0 0, others
则 X (z)zm1dz 2j x(n) C
考 3. 吴湘淇 肖煕 郝晓莉 信号 系统与信号处理的软硬件实现 电子工业出版
资
社 2002 年
料 4. 周浩敏.王睿.测试信号处理技术. 北京航空航天大学出版社,2005 年
5.
指导教师签字
基层教学单位主任签字
说明:此表一式四份,学生、指导教师、基层教学单位、系部各一份。 年月 日
MATLAB 软件,在数字信号处理方面具有得天独厚的优势。利用目录下的系统函数, 用户可以实现波形的产生,信号的变换,滤波,功率谱估计,系统设计与稳定性分析, 小波信号分析等众多功能。本文既是以数字信号处理的理论为基础,应用 MATLAB 软件 用 Z 变换与 Z 反变换设计控制系统并分析稳定性的一个具体事例。
[关键词]MATLAB;控制系统;Z 变换及反变换;稳定性;极点;单位脉冲响应;单位 阶跃响应
1
燕山大学数字信号处理课程设计报告
第 2 章 基本原理
2.1 MATLAB 及数字信号处理
MATLAB 是矩阵实验室之意。除具备卓越的数值计算能力外,它还提供了专业水平 的符号计算,文字处理,可视化建模仿真和实时控制等功能。
x(n)
z
n
z
m1
n0
由留数定理:
Res X (z)zn1
m
zzm
jIm(z)
Zm
C
Re(z)
n=m 一项
zm为C内的奇点,即( X (z) zn1)的极点(一阶)
x(n)
m
Res
X (z)z n1
,n 0
zzm
0, n 0
4
燕山大学数字信号处理课程设计报告
Res X (z)zn1 zzm z zm X (z) zn1
信号是数字信号处理领域中最基本、最重要的概念。简单的说,信号就是信息的载 体,是信息的物理体现。信号既可以分为时间连续、幅度也连续的模拟信号和在时间和 幅度上都经过量化的数字信号,也可以划分为连续时间信号和离散时间信号。几乎在科 学技术的每一领域,为了,为了信号的提取,都要进行信号处理,就是一数值计算的方 法对信号进行采集,变换,综合,估计,与识别的加工处理过程,借以达到提取信息和 便于应用的目的。随着计算机和信息科学的飞速发展,信号处理已经逐渐发展为一门独 立的学科,是信息科学的重要组成部分。在语音处理,雷达,航空,航天,地质勘探, 通信,生物医学工程等众多领域得到了广泛应用。
。
(z)
z n1
一阶极点 zm
采样
f (t)
z变 换 f *(t)
F(z)
拉氏变换
部分分式 F(s)
3 留数法(围线积分法) 在 X(z)的收敛域内选择一逆时针围线 C 包围原点,然后,上式两边绕 C 积分。
X (z) x(n)zn , z Rx1 n0
两边乘z m1 ,
X (z) zm1
(7-14)
式(7-14)被定义为采样函数 f * (t) 的 Z 变换。它和式(7-13)是互为补充的两种
变换形式。前者表示 Z 平面上的函数关系,后者表示 S 平面上的函数关系。
(2)对 Z 变换还必须强调指出以下两点:
2
燕山大学数字信号处理课程设计报告
1. 变量 z 是一个复变量,变量 s 在拉氏变换中也是一个复变量,可表示为 若z s=zσm是+jXω(z)z n1 的s阶极点时,
设 计 传递函数的分子系数 a1,a2,a3……和分母系数 b1,b2,b3…… 技 术 参 数
利用 Z 变换-反变换的方法求取系统的响应,判定系统的稳定性
设
设计三个离散线性定常系统(其中包括稳定的和不稳定的),并利用 Z 变换
计 要
和反变换的方法计算系统的单位脉冲响应和单位阶跃响应,并通过极点判定系
2. 部分分式法
设连续函数为 f (t) ,其对应的拉氏变换为 F(s) 。为求拉氏反变换,可将 F(s) 写
成部分分式之和的形式
其中:
n
F(s)
Ai
i1 s pi
n- F(t) 的极点数目; pi - F(s) 的极点; Ai -常系数。
只要求出 pi 及 Ai ,就可以按下式求出 F(s) 所对应的 Z 变换式 F (z) :
或者
F (z) f (0) f (T )z 1 f (nT )z n
(7-16)
上式就是离散时间函数 f * (t) 进行 Z 变换的一种级数表达形式。由这种表达形
式可知,如果知道连续时间函数 f (t) 在各采样时刻 nT(n=0,1,2,…)上的采样值
f (nT ) ,便可根据式(7-16)求得其 Z 变换的级数展开式,它是一个无穷项的级数。
因此,Z 变换又称为采样拉氏变换,是研究线性离散系统的重要数学工具
其拉氏变换为