螺旋理论
第01章_螺旋理论基础
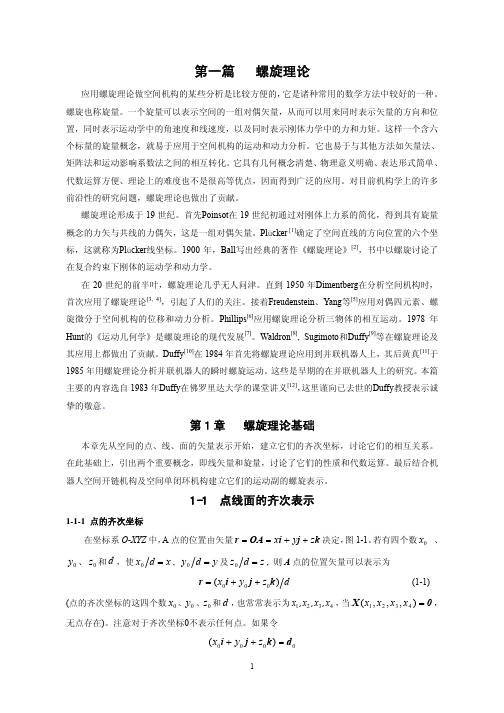
第一篇 螺旋理论应用螺旋理论做空间机构的某些分析是比较方便的,它是诸种常用的数学方法中较好的一种。
螺旋也称旋量。
一个旋量可以表示空间的一组对偶矢量,从而可以用来同时表示矢量的方向和位置,同时表示运动学中的角速度和线速度,以及同时表示刚体力学中的力和力矩。
这样一个含六个标量的旋量概念,就易于应用于空间机构的运动和动力分析。
它也易于与其他方法如矢量法、矩阵法和运动影响系数法之间的相互转化。
它具有几何概念清楚、物理意义明确、表达形式简单、代数运算方便、理论上的难度也不是很高等优点,因而得到广泛的应用。
对目前机构学上的许多前沿性的研究问题,螺旋理论也做出了贡献。
螺旋理论形成于19世纪。
首先Poinsot 在19世纪初通过对刚体上力系的简化,得到具有旋量概念的力矢与共线的力偶矢,这是一组对偶矢量。
Pl ücker [1]确定了空间直线的方向位置的六个坐标,这就称为Pl ücker 线坐标。
1900年,Ball 写出经典的著作《螺旋理论》[2],书中以螺旋讨论了在复合约束下刚体的运动学和动力学。
在20世纪的前半叶,螺旋理论几乎无人问津。
直到1950年Dimentberg 在分析空间机构时,首次应用了螺旋理论[3, 4],引起了人们的关注。
接着Freudenstein 、Yang 等[5]应用对偶四元素、螺旋微分于空间机构的位移和动力分析。
Phillips [6]应用螺旋理论分析三物体的相互运动。
1978年Hunt 的《运动几何学》是螺旋理论的现代发展[7]。
Waldron [8], Sugimoto 和Duffy [9]等在螺旋理论及其应用上都做出了贡献。
Duffy [10]在1984年首先将螺旋理论应用到并联机器人上,其后黄真[11]于1985年用螺旋理论分析并联机器人的瞬时螺旋运动。
这些是早期的在并联机器人上的研究。
本篇主要的内容选自1983年Duffy 在佛罗里达大学的课堂讲义[12],这里谨向已去世的Duffy 教授表示诚挚的敬意。
沉默螺旋理论
• 因此,在网络传播时代,沉默的螺旋理论 因此,在网络传播时代, 面临着新的环境条件,面临新的问题, 面临着新的环境条件,面临新的问题,沉 默的螺旋理论需要深入研究新现象, 默的螺旋理论需要深入研究新现象,作出 新的解释。 新的解释。
•
该理论认为: 大众观念” 该理论认为:“大众观念”作为一种作用于政府和个人 的力量,它已在所有的人类社会中存在了数千年, 的力量,它已在所有的人类社会中存在了数千年,并且不 断创造和保持着社会运作必需的和谐和一致。 断创造和保持着社会运作必需的和谐和一致。 “大众”可被理解为“群众的眼睛”、“人人都可以 大众”可被理解为“群众的眼睛” 看得见”的意思,因此,可理解为一种社会控制。 看得见”的意思,因此,可理解为一种社会控制。 “观念”一词指公开场合中被表达的观点和涉及价值 观念” 观念问题的行为。观念的力量来源于我们社会的本质, 观念问题的行为。观念的力量来源于我们社会的本质,来 源于社会对被禁止的观点和行为实施的严刑峻法, 源于社会对被禁止的观点和行为实施的严刑峻法,来源于 个人对孤立的恐惧。 个人对孤立的恐惧。 恐惧使个人在表达自己观点的时候, 恐惧使个人在表达自己观点的时候,在社会允许的情 况下以一种“准统计的方式”不断变化着, 况下以一种“准统计的方式”不断变化着,在社会上赞同 的呼声大的情况下也表达赞同; 的呼声大的情况下也表达赞同;在赞同的呼声下降的时候 保持沉默,沉默进一步使原有的观点失去了民心。 保持沉默,沉默进一步使原有的观点失去了民心。
• 诺依曼认为,大众观念并不是在18世纪才被人们 诺依曼认为,大众观念并不是在 世纪才被人们 认识的,它实际上在人类社会已经存在了数千年, 认识的,它实际上在人类社会已经存在了数千年, 并且不断创造和保持着社会运作必须的和谐和一 因此,大众的意见可以认为是一种社会控制, 致。因此,大众的意见可以认为是一种社会控制, 客观上是为了"促进社会一体化 促进社会一体化, 客观上是为了 促进社会一体化,保障基本行为和 观念达到足够的一致水平。 ( 观念达到足够的一致水平。"(Noelle-Neumann, E.1993:220)。这一理论建立在人的社会从众心 )。这一理论建立在人的社会从众心 )。 理和趋同行为的分析基础之上, 理和趋同行为的分析基础之上,观念的力量来源 于我们社会的本质, 于我们社会的本质,来源于社会对被禁止的观点 和行为的严刑,来源于个人对孤立的恐惧。 和行为的严刑,来源于个人对孤立的恐惧。恐惧 的个人在社会中赞成的呼声不断升高的时候, 的个人在社会中赞成的呼声不断升高的时候,表 达自己的赞成的观点, 达自己的赞成的观点,在赞成的呼声下降的时候 保持沉默, 保持沉默,沉默进一步使得原有的观点失去了民 心。
螺旋理论
当前国际机器人学术界最热门的运动学与动力学分析理论工具 参考资料: 《空间机构学》黄真 《并联机器人机构学理论及控制》黄真 孔令富 方跃法 《机器人操作的数学导论》 李泽湘等 一个旋量由两个空间的3维矢量组成: 位置+方向(p ; q) ; 速度+角速度 (v ; w) ; 力+力偶 (f ; m)
螺旋理论基础
UPU分支运动螺旋系:
$1 1 0 0 ; 0 0 0 转动副: $ s ; r s $2 0 1 0 ; 0 0 0 $3 0 0 0 ; 0 0 1 移动副: $ 0 ; s
$4 0 1 0 ; a4 0 0 $5 1 0 0 ; 0 b5 0
机械系统---机构学---基本概念
当由构件组成机构时,为了使机构中各构件相互之间能具 有确定的相对运动关系,必须使构件间保持一定的接触形式, 使构件问既相互联接而又保持相对运动关氖这种特殊的接触形 式称为运动副。
$1 0 1 0 ; 0 0 0
$5 0 0 0 ; 0 1 0
$1 1 0 0 ; 0 0 0 $2 0 1 0 ; 0 0 0 $3 0 0 1 ; 0 0 0
球铰轴线在空间的描述
$1 1 0 0 ; 0 b1 c1
$ 2 0 1 0 ; a2 0 c2 $3 0 0 1 ; a3 b3 0
1 s1 0 0
x1 0 r1 y1 r s z1 z y 1 1
机械系统---机构学---自由度分析
螺旋理论基础----直线的矢量方程
直线在空间的位置决定于:直线的方向和直线上任一点的位置
7天螺旋理论

7天螺旋理论的核心:控制转化率,销量和流量以7天为一周期的螺旋式提升。
所以7天螺旋理论的掌握要点必需有一个计划表,按照这个计划表来严格执行和操作,才能深刻领悟和理解7天螺旋理论的精髓。
一、7天螺旋理论总计划表说明:1.7天螺旋理论核心是要控制的转化率是固定的。
(基本属于行业优质宝贝高转化率,并且下架前一天转化率最高,总体是递增后期保持平稳高转化。
2.7天螺旋理论有公式的地方(灰色表格),不要动,自己填写的地方填写上,有公式表格会自动生成数据。
不小心动了公式,把公式对的单元格向右拖动的一个单元格就可以了。
3.首先定导入的流量比例,修改优质流量占真实流量占比,确定要导入的流量,如果操作当时没有流量,需要优化宝贝。
如果流量过少,需要降低刷的优质流量占比,或放低爆款目标。
4.7天螺旋理论刷的流量和真实流量占比是自己填的,这个根据自己的行业情况,和自己想要达到的爆款目标定。
前期刷的流量比例大,后期真实流量比例大。
5.真实流量和销量自己填,并时时更新,并做记录比如2个小时可以更新一次流量。
二、7天螺旋理论操作要点:1.(控制转化率3.7%,根据你来流量的情况控制你刷的优质流量和淘宝给你的真实流量的比例,比如。
1:5,淘宝每给你1个流量,你再刷5个。
)2.7天螺旋理论说明中,第一单尽量在总流量20个流量左右刷3.客户没有真实来流量,不要刷流量4.刷流量尽量估算淘宝的给你的流量频率,均匀到一天的时间段中,不一下子刷很多5.刷流量的入口,要通过客户搜索的入口来,客户怎么来,你也完全怎么来。
比例也一致。
越到后期,客户入口越多,你可以自由掌握,哪个来源入口多,你也在那个入口刷的比率高6.刷流量前期很费时间和细节,但是就需要几天,越到后边越省力,以后就不用刷了,流量会有意想不到的飞升!坚持就是胜利!"三、关于7天螺旋理论总结:7天螺旋理论是目前打造爆款较火热的话题,只有严格按这张7天螺旋理论增长表格图来执行和操作,才能实现免费流量的爆涨。
沉默的螺旋理论名词解释
沉默的螺旋理论名词解释螺旋理论是一种关联到心理变化的理论,由阿尔伯特西塞(Albert Ellis)于1955年提出。
螺旋理论认为,影响某人情绪的因素有许多,这些因素可以归纳为三个不同的螺旋模式:相信(Beliefs)、情感(Emotions)和行为(Behaviors)。
螺旋理论强调,某些相信(Beliefs)会在遭遇特定外界刺激时产生影响,产生某些情感(Emotions),而这些情感(Emotions)又会导致某种特定的行为(Behaviors)。
在一般情况下,某个相信(Beliefs)可以是从家人或朋友口中得到的,但可能也可以是来自客观事实或是个人逻辑推论等索取而来的。
比如,有人可能会相信孤独会让他们变得更孤独,而这种相信产生的情感就是悲伤,从而导致行为是不去社交。
在螺旋理论中,所有的相信,情感和行为都是相互关联的,并且在平衡中互相交织在一起,形成一种系统化的心理活动。
以个体为例,如果他们的行为是受到自己的相信和情感的影响,那么他们的相信和情感也在不断受到行为的影响着。
这种关系使得一个人的心理模式变得复杂而又深刻,即便他们对自己的情感和行为缺乏足够的自我了解,也可以发现自己的行为、情感和相信之间的联系。
阿尔伯特西塞认为,改变一个人的行为,是从改变这个人的相信(Beliefs)开始的。
因此,改变一个人的心理状态,首先应该考虑这个人所拥有的相信(Beliefs),以及这些相信产生的情感(Emotions)和行为(Behaviors)之间的关系。
不同的相信会影响不同的情感,从而对行为产生不同的影响。
改变自己的心理状态,就是要从改变一个人的相信(Beliefs)出发,学会控制自己的情感(Emotions),改变自己的行为(Behaviors),从而促进自我发展,拥有健康心理状态。
螺旋理论在心理咨询中也被广泛应用。
心理咨询师会根据患者的情况,探查患者的相信(Beliefs)是否与他们客观事实相符,从而改变他们的情感(Emotions),从而改变他们的行为(Behaviors)。
淘宝七天螺旋理论
淘宝七天螺旋理论淘宝七天螺旋理论,可以简单的理解为在淘宝的一个下架周期之内,如果销量增长,那么跟随而来的宝贝流量也增长。
大家请仔细去体会这段话的意思。
实际上这段话的核心就是告诉大家,在一个下架周期内,淘宝会给你一定的流量,如果流量给了你之后,你的宝贝转换率不错,那么ok,下个周期系统会给你更多流量。
这样就能够形成一种良性的循序。
这个概念对不对?答案是显而易见的,淘宝是一个平台,他必需兼顾三方的利益。
淘宝本质上希望客户来到自己网站之后有良好的购物体验。
那么淘宝凭什么区判断店铺好坏呢?当然就是转化率了。
淘宝一般会给新宝贝一些扶持,给你流量之后,没有成交,那么淘宝会判断店铺不行,给予降权。
本质上,原理就是一个用户的投票权。
围绕的就是一个转换率问题。
你发布一个宝贝,淘宝都会在你新发布宝贝的时候给你一部分流量,淘宝会给你一个新品的扶植流量,这个时候流量进来了,买家在你的店铺里面停留时间长,访问深度也不错,转换率也很好,这个时候就相当于用户为你的产品投了一票认可的票。
大家记住一点,淘宝的属性决定了,如果你的店铺不遵循螺旋理论,那么面临的是被淘汰的命运。
这也是绝大多数淘宝卖家根本不了解的,或者忽视的。
抛开这个“七天螺旋”理论的噱头来看,淘宝的这种现象其实是一个非常正常的现象。
转换率高的,从淘宝的利益来说,肯定是有助于提高他的流量价值,尽快的促成成交,提高他的整网销售额,把买家留在淘宝;从买家的利益来说,他更容易挑选出自己喜欢的产品,用户体验更加的好,更加的舒适,他就会来淘宝继续购物,这也是淘宝平台喜闻乐见的结果;而从另外一个意义上来说,这种现象从客观上“倒逼”卖家不断优化宝贝,作出调整。
可以说通过这一个途径,淘宝达成了平台三方利益共赢的目的。
总结上面的理论,希望大家记住一句话就是:有条件就好好按照这个理论实施销量,没有条件也要创造条件实施这个模式。
新店铺,新产品没有一个销量的情况下:大家可以找亲戚和朋友买几笔!尽量也是让朋友和亲戚从关键词搜索进入宝贝购买,不要直接给链接购买!购买完后,你是老店铺新产品情况的话就把老顾客用起来吧。
螺旋理论
基于螺旋理论的空间机构自由度分析陈振宇S12080202010 机电3班(燕山大学机械工程学院河北秦皇岛)摘要:本文系统总结和陈述了基于约束螺旋理论的机构自由度分析的原理和方法,经过实践证明,这种方法切实有效,可以解决几乎所有空间自由度问题,相对别的方法而言更具有一般性。
此外,这个方法对自由度瞬时性和连续性的判定也非常方便。
相对而言,它成为当今有效分析自由度的一般方法,具有重要的科学价值和实用意义。
关键词:螺旋理论机构自由度连续性瞬时性Degree of Freedom Analysis of Spatial Mechanisms Based on the ScrewTheoryChen Zhenyu S12080202010(Mechanical Engineering Academy of Yanshan University Qinhuangdao of Hebei Province)Abstract:This paper state and summarize in system the method and theory of degree of freedom analysis of spatial mechanisms based on the screw theory, it proved to be true that the effort is correct and merely solute all the problem of degree of freedom of spatial mechanisms, it is an universal method compared to others. In addition, the method is more effective to judge the instantaneity and the continuity of the degree of freedom. Relatively speaking, it becomes a normal and effective method to analyze freedom. The value of science and the practical meaning of it is important.Key words:The screw theory degree of freedom of spatial mechanisms continuity instantaneity1 前言对机构最基本的认识是要知道它的自由度。
沉默的螺旋理论
民意:为了避免被孤立而在公共场合表达的态度 或行为
7
沉默的大多数
• 由于媒介的作用,事实的真相往往被无限 的放大或缩小。很多时候人们无法改变现 实,却又不想向现实缴械投降,沉默便成 了多数人的选择。
• /n/2012/1221/c 212785-19976336.html
对于沉默我是这样理解的
1
男人沉默是金??
此时无声胜有声?
害怕被社会孤立外,“面子”也是人们选择 沉默的原因之一 受舆论或者权力的压迫 为了既得利益忍辱负重 中庸之道的影响
沉默螺旋理论的概念
2
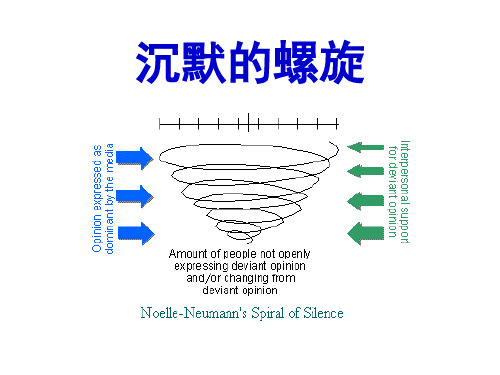
沉默的螺旋概念基本描述了这样一个现象:人们在表 达自己想法和观点的时候,如果看到自己赞同的观点, 并且受到广泛欢迎,就会积极参与进来,这类观点越 发大胆地发表和扩散;而发觉某一观点无人或很少有 人理会(有时会有群起而攻之的遭遇),即使自己赞 同它,也会保持沉默。意见一方的沉默造成另一方意 见的增势,如此循环往复,便形成一方的声音越来越 强大,另一方越来越沉默下去的螺旋发展过程。
9
凶手:药家鑫,男,22岁, 西安音乐学院钢琴系大三学 生
被害人:张妙,女,26岁, 西安宫子村村民,遇害时孩 子两岁半
关键人物
媒体反应
10
张显,博士,副教授。药家鑫案 中原告代理人,受害人张妙亲属。
在药家鑫故意杀人案中,张显通 过其微博针对药家鑫及其家人发 布了一系列言论,包括称药家鑫 是“官二代”、“富二代”。
(三)沉默的螺旋不值得欢呼
15
一般说来,传播生态平衡的情况下,沉默的 螺旋是不会出现的,因为人们可以公开的不 受限制的表达自己的意见。相反,传播生态 失衡,往往使劣势少数派的意见不能公开自 由地表达,而优势少数派的意见不仅可以公 开表达,而且能够得到无限制的放大,从而 形成优势意见。
论沉默的螺旋理论
论沉默的螺旋理论德国女传播学家伊丽莎白诺尔·纽曼在20世纪70年代提出了一种描述舆论形成的理论假设──“沉默的螺旋”。
这是她对历史的了解,再加上大量的民意调查所得出的一种新的大众传播理论。
伊丽莎白纽曼本身来说,是一名出色的传播学家。
她于1916年毕业于柏林大学,又曾学习新闻学,哲学,历史学等科目。
1937年,赴新闻学最具盛名的美国密苏里大学新闻学院研修,求学的精神又让她游历了全美36个州以及墨西哥,日本,朝鲜,中国,埃及等地。
丰富的经历为她开阔了不少眼界,获得了更多她所需要的资料,使得以后对她提出这一理论提供了坚实的思想基础。
其次,纽曼曾供职于民意调查机构,多次任教各大学校教授,潜心研究传播学,并于1984年出版其代表作《沉默的螺旋》,系统论述了其思想主张,从此名声大振。
1965年,联邦德国进行议会选举,一方是社会民主党,一方是基民盟和基社盟的联合阵线。
整个参选过程中,双方票数不相上下,但到最后投票的关键时刻,却发生了“雪崩现象”。
基民盟和基社盟的联合阵线以压倒性的绝对优势战胜了社会民主党。
为找出这一问题的根源,纽曼对选举期间追踪调查的全部数据进行了分析。
纽曼发现,尽管双方支持率没有变,但胜者的“估计”却发生明显倾斜,这一认趋势发展到投票前日变成压倒多数。
纽曼认为,“周围意见环境的认知”所带来的压力,导致人们最终改变投票意向。
此后,纽曼对“意见气候”和“多数意见”对个人的压力进行多次实证研究,由此提出了著名的“沉默的螺旋理论。
”沉默的螺旋概念基本描述的是:人们在表达自己想法和观点的时候,如果看到自己赞同的观点,并且受到广泛欢迎,就会积极参与进来,这类观点会很快的扩散开来,并影响他人;而发觉某一观点无人或很少有人理会,即使自己赞同它,也会保持沉默。
意见一方的沉默造成另一方意见的增势,如此循环往复,便形成一方的声音越来越强大,另一方越来越沉默下去的螺旋发展过程。
总的来说,沉默的螺旋理论分为三个命题。
沉默的螺旋理论

沉默的螺旋理论德国社会学家诺依曼于1974年提出的一个理论。
在一个公开的、公共的议题面前,每个人在公开发表自己的意见之前,总要先听周围人的意见,以免使自己陷入孤立境地而受到众人责难。
当他发现自己的意见与多数人意见相似时,便会大胆发声。
而自己意见处于劣势一方时,则会选择沉默或者转向。
这样强势的一方愈发强大,弱势一方更加沉默,如此形成一个螺旋式过程。
P19时滞问题时滞是指媒介对公众的影响从发生到产生效果需要的时间长度。
学者斯通和麦库姆斯曾做过一项研究,专门用于考察媒介议程设置的时滞问题。
其主要研究方法是把先前有关公众议程的数据,与在此之前较长一段时间的媒介内容的议程数据进行对比和相关分析,进而得出媒介方程转向公众议程所需要的时间差。
就媒介实务人员而言,时滞是一个重要问题。
对公关以及其他信息行业的工作人员而言,了解方程作用的时滞,将有助于提高传播活动的效率。
法兰克福学派:又称“批判的社会理论”,是“西方马克思主义”思潮中最早出现的流派,创建于1923年。
从人本主义的立场出发,无情揭露和批判资本主义社会的种种弊病,全面否定资本主义制度,主张通过所谓的“心理结构革命”或人的“本能革命”来建立一个普遍快乐的社会。
在现代西方哲学中,属于人文主义流派。
代表人物霍克海默、马尔库塞、哈贝马斯等。
培养分析培养分析是研究大众传播潜移默化的社会效果,以美国批判学者格伯纳为代表。
最初研究焦点是电视的暴力内容的社会影响问题,后来扩展为考察大众媒介提示的“象征性现实”与人们的现实观之间的联系。
该理论认为,大众传播对人们认识现实世界发挥着重大影响,由于传播媒介意识形态和价值的倾向性,人们对现实的认识与观现实有着很大的距离,它们更接近于媒介的“象征性现实”而非客观现实。
传播媒介对人们现实观的影响是一个“培养”过程。
反沉默螺旋理论
反沉默螺旋理论
反沉默螺旋理论是由美国心理学家伊丽莎白·哈里斯在20世纪80年代提出的。
该理论指出,性别歧视、压迫行为和强加于女性的期望使女性失去说话权。
因此,女性在社会中处于一种相对被动和沉默的状态,这种状态会间接影响她们的观念和行为,以致她们在性别分工中承担更多的家庭责任,被剥夺了与男性同等的权利。
反沉默螺旋理论也指出,如果女性获得发言权,就能够结束这种沉默,从而改变性别分工,让男女共享家庭责任,平等地参与社会活动。
螺旋理论的形成及特征
螺旋理论的形成及特征螺旋理论是20世纪中叶,由布罗森(Bruchon)首先提出的一种理论,专门描述社会发展过程中,其内部和外部环境及其影响的时间效应变化的关系。
一些社会发展和循环理论提出新的观点,更多地关注了社会的发展和独特的时间结构。
本文重点讨论了螺旋理论形成的背景、基本特征和理论结构。
一、螺旋理论形成的背景社会发展并不是一个直线进行,它不仅受到内在和外部环境的控制,而且还有其自身的循环性,所以“一般形势循环”理论逐渐形成,其中螺旋理论占据了主要地位。
布罗森提出了螺旋理论,根据这一理论,社会发展不仅受到内部演变的影响,更受到外部环境的影响。
这有助于更好地描绘社会的发展历程,进而发展出螺旋理论。
二、螺旋理论的基本特征螺旋理论可以更全面地刻画社会发展的变化过程,结合内外部的影响,描述社会变迁的相互关系及其起伏变化。
1)社会变迁过程分为三个不同的时期:社会变迁的前期(阶级)、发展期(社会变革)和调整期(政治变迁)。
2)社会扩张的进程表现为周期性的加强,这种加强有一定的变化,在内部和外部压力下,发展出一系列变化。
3)内部和外部环境的影响相互交错,这种相互交错的影响限制社会变迁的趋势和方向。
4)受外部环境的影响,社会变迁的趋势或发展趋势可能会受到外部影响而发生改变。
三、螺旋理论的理论结构螺旋理论分为社会行为循环模式和内部外部环境模式:社会行为循环模式可分为三个阶段:破坏(社会失序)、建立(社会重新组织)和发展(社会发展);内部外部环境模式分为三个层次:技术变迁(技术环境变迁)、社会结构变迁(社会环境变迁)和文化环境变迁(文化环境变迁)。
螺旋模型反映了社会变迁过程中不同环境改变作用下社会组织的演变以及不同时期间的社会发展状况。
总之,螺旋理论把历史发展看作一种螺旋叠加的过程,反应了内部和外部环境的影响,把外部社会结构模式性变迁的影响称作“内部模式”,将内部变迁的影响称作“外部模式”,是一种具有时间效应的理论。
传播学沉默的螺旋名词解释

传播学沉默的螺旋名词解释
传播学沉默的螺旋是一种社会心理学理论,指出人们在特定社会环境下的沉默现象。
这一理论由奥地利传播学者伊丽莎白·诺伊曼和美国社会学家诺尔曼·弗莱恩创造并发表。
沉默的螺旋理论认为,人们在面对某些敏感话题时,会感到不安或害怕因自己的观点、态度或行为而被排斥、孤立或惩罚。
因此,他们倾向于选择保持沉默并避免与他人产生冲突。
这种沉默现象会导致“沉默的螺旋”,即越来越多的人保持沉默,导致少数人的观点或意见在公众中占据主导地位。
沉默的螺旋理论的理论基础是社会认同理论和社会心理学中的“从众效应”。
社会认同理论认为,人们倾向于在社会中寻求认同和接纳,而从众效应指的是人们因为担心被排斥而遵循主流观点或行为。
沉默的螺旋理论的应用广泛,包括政治、媒体和民意调查等方面。
政治方面,该理论可以解释选民对某些政治问题的态度和投票行为。
媒体方面,该理论可以解释为什么某些话题比其他话题更容易引起公众注意和关注。
在民意调查中,该理论可以解释为什么人们可能会对某些话题的态度和观点保持沉默。
总之,沉默的螺旋理论认为,人们在特定社会环境中因为担心被排斥而选择保持沉默,这种沉默现象会导致少数人的观点或意见在公众中占据主导地位。
三螺旋理论
三螺旋理论三螺旋理论是一种古老而又全面的思维模式,该理论也经常被称为维护螺旋理论。
它最初有里士满的哲学家克里斯托弗·马丁和罗茨·布尔沃特在20世纪60年代提出。
它涉及如何认识、运用和实施一种不断地创新、繁荣和可持续发展的模式。
三螺旋理论由三个层次组成:运动、行为和意义。
该理论试图揭示社会性数据在组织和构建问题中的影响。
它是一个重要的逻辑秩序,还强调学习就是实现新变化的主要动力。
一、运动:运动部分包括:分析,准备,实施,核对和计划。
分析需要明确的熟悉的把握客观事实,临时分析现有的方法,而准备阶段则是收集和处理信息,准备变革措施,方向,目标以及应对可能出现的问题和约束。
实施阶段,需要全面考虑实施变革,并且准备好执行新的模式。
核对阶段是确保实施了正确的策略,并帮助确定现有的策略的有效性,计划阶段是制定可行的计划,在未来达到目标和成果。
此外,运动阶段也为识别问题提供了清晰的基础,并强调改善的重要性。
二、行为:行为部分是三螺旋理论的核心,包括:重整,重新定义,结构化和调整。
重整阶段是在实施之前,需要及时应对并解决变化可能引发的问题,重新定义是制定根据变化来重新定义价值观和目标,结构化是给出维护变化的支持,调整是处理新的实施演变过程中出现的问题,并用不同的调整措施把问题解决掉。
三、意义:意义层次分为两个阶段:可持续发展和创新。
可持续发展的意义是指变革的后果是什么,需要弄清楚它的短期和长期后果,以及它是否可持续发展。
创新是改变技术、运营方式的进步,是把有效的新技术和有效的思考方式引入,在变革中形成新的业务模式。
总之,三螺旋理论提供了一种可持续转型的方式,使组织能够正确实施变革,按照一定的规则工作,在客观情况下是运动、行为和意义,以便实现可持续发展和创新。
它有助于管理现有资源、降低成本和获得持久的竞争优势。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
刚体运动螺旋系
机械系统---机构学---自由度分析
3-UPU 并联机器人
U:自由度数=2 P:自由度数=1 U:自由度数=2
约束数=6-2-1-2=1
机械系统---机构学---自由度分析
螺旋理论基础----旋量对偶原理
$1 ( s1 ; s10 )
$2 ( s2 ; s20 )
$1和$2对偶
机械系统---机构学---基本概念
当由构件组成机构时,为了使机构中各构件相互之间能具 有确定的相对运动关系,必须使构件间保持一定的接触形式, 使构件问既相互联接而又保持相对运动关氖这种特殊的接触形 式称为运动副。
$1 0 1 0 ; 0 0 0
$5 0 0 0 ; 0 1 0
$1 1 0 0 ; 0 0 0 $2 0 1 0 ; 0 0 0 $3 0 0 1 ; 0 0 0
(r r1 ) s 0
r s r1 s s0
机械系统---机构学---自由度分析
螺旋理论基础----旋量的引入
r s r1 s s0
$ ( s ; s0 )
直线的方向s 与坐标系的选择无关,s0 和坐标系选择有关
机械系统---机构学---自由度分析
$1 $2 s1 s20 s2 s10 0
物理意义:互易积为零的两个螺旋,一个表示物体运动,一个表示物体受到
的约束力,则互易积就是力螺旋对运动螺旋所作的瞬时功,如两个螺旋的互易积 为零,则表示力螺旋不能约束运动螺旋代表的瞬时运动。
机械系统---机构学---自由度分析
螺旋理论基础----旋量对偶原理
机械系统---机构学---基本概念
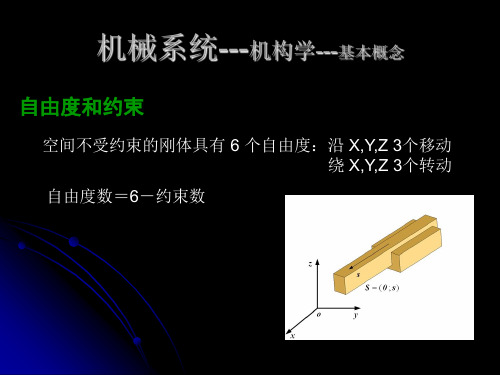
自由度和约束
空间不受约束的刚体具有 6 个自由度:沿 X,Y,Z 3个移动 绕 X,Y,Z 3个转动 自由度数=6-约束数
机械系统---机构学---基本概念
运动副:两个构件之间直接接触所形成的可动联接
两个相邻构件直接接触 两者之间允许一定的相对运动
每个构件至少和另外一个构件通过运动副联接
螺旋理论基础----移动描述----运动旋量
移动描述
(0 ; s )
机械系统---机构学---自由度分析
螺旋理论基础----运动描述
转动描述
(ω ; v0 )
机械系统---机构学---自由度分析
螺旋理论基础----力描述----力旋量
力矢量描述
( f ; m0 )
力偶描述
(0 ; s )
描述约束
$ $1 0
r
$ r $2 0 $ r $5 0
$ r (0 0 0 ; 0 0 1)
机械系统---机构学---自由度分析
3-UPU 并联机器人
机械系统---机构学---矢量的线性相关性
力线矢和力偶
力线矢:空间一条直线,由直线方向 s 和直线上任一点 r 确定
$ ( s ; r s)
旋量理论基础----始于1900年,R.S. Ball
当前国际机器人学术界最热门的运动学与动力学分析理论工具 参考资料: 《空间机构学》黄真 《并联机器人机构学理论及控制》黄真 孔令富 方跃法 《机器人操作的数学导论》 李泽湘等 一个旋量由两个空间的3维矢量组成: 位置+方向(p ; q) ; 速度+角速度 (v ; w) ; 力+力偶 (f ; m)
机构的自由度:确定机构中某一构件相对于机架的位置所需的 独立参变量的数目。
GrüblerΒιβλιοθήκη Kutzbach自由度计算公式M d n g 1 fi
i 1
g
M: 机构的自由度数 d: 机构的阶数 n: 机构的构件数 g: 机构的运动副数 fi: 第i个运动副的自由度数
机械系统---机构学---自由度分析
物理意义:互易积为零的两个螺旋,一个表示物体运动,一个表示物体受到
的约束力,则互易积就是力螺旋对运动螺旋所作的瞬时功,如两个螺旋的互易积 为零,则表示力螺旋不能约束运动螺旋代表的瞬时运动。
机械系统---机构学---自由度分析
螺旋理论基础----旋量对偶原理
$ r $1 0 $ $2 0
力偶:空间自由矢量,由方向 s 确定
约束沿 s 方向的移动
$ (0 ; s )
约束绕 s 方向的转动
(右手法则)
机械系统---机构学---自由度分析
3-UPU 并联机器人
空间三个线性无关的力偶约
束动平台的三个转动自由度
球铰轴线在空间的描述
$1 1 0 0 ; 0 b1 c1
$ 2 0 1 0 ; a2 0 c2 $3 0 0 1 ; a3 b3 0
1 s1 0 0
x1 0 r1 y1 r s z1 z y 1 1
机械系统---机构学---基本概念
当由构件组成机构时,为了使机构中各构件相互之间能具 有确定的相对运动关系,必须使构件间保持一定的接触形式, 使构件问既相互联接而又保持相对运动关氖这种特殊的接触形 式称为运动副。 两个以上构件以运动副联接而成的系统称为运动链
$1 1 0 0 ; 0 0 0 $2 0 1 0 ; 0 0 0 $3 0 0 1 ; 0 0 0 $4 0 0 0 ; 1 0 0 $5 0 0 0 ; 0 1 0 $6 0 0 0 ; 0 0 1
$1 ( s1 ; s10 ) (l1 m1 n1 ; o1 p1 q1 )
$2 ( s2 ; s20 ) (l2 m2 n2 ; o2 p2 q2 )
$1和$2对偶
$1 $2 s1 s20 s2 s10 (l1 o2 m1 p2 n1 q2 ) (l2 o1 m2 p1 n2 q1 ) 0
机械系统---机构学---自由度分析
螺旋理论基础----物理意义 r s s0
r s r ω v0
刚体上和坐标系原点 重合的那一点的速度
角速度矢量
ωs
机械系统---机构学---自由度分析
螺旋理论基础
万向铰轴线在空间的描述
机械系统---机构学---自由度分析
螺旋理论基础
机械系统---机构学---自由度分析
螺旋理论基础----直线的矢量方程
直线在空间的位置决定于:直线的方向和直线上任一点的位置
r1 ( x1
y1
z1 ); r2 ( x2
y2
z2 )
S ( x1 x2 )i ( y1 y2 ) j ( z1 z2 )k Li Mj Nk
机械系统---机构学---自由度分析
螺旋理论基础
机器人末端操作器的瞬时运动:
e $e ω1 $1 ω2 $1 ω6 $6 ω j $ j
j 1
6
机械系统---机构学---自由度分析
螺旋理论基础
UPU分支轴线在空间的描述 分支运动螺旋系:
$1 1 0 0 ; 0 0 0 $2 0 1 0 ; 0 0 0 $3 0 0 0 ; 0 0 1 $4 0 1 0 ; a4 0 0 $5 1 0 0 ; 0 b5 0
UPU分支具有5个自由度, 对动平台施加一个约束
$ r ( sr ; sr 0 ) (lr mr nr ; or pr qr )
机械系统---机构学---自由度分析
螺旋理论基础----旋量对偶原理
$r $1 sr s10 s1 sr 0 (lr o1 mr p1 nr q1 ) (l1 or m1 pr n1 qr ) 0 $r $2 sr s20 s2 sr 0 (lr o2 mr p2 nr q2 ) (l2 or m2 pr n2 qr ) 0 $r $5 sr s50 s5 sr 0 (lr o5 mr p5 nr q5 ) (l5 or m5 pr n5 qr ) 0
机械系统---机构学---基本概念
转动副 R:两个构件之间相对运动为绕某一轴线的转动
机械系统---机构学---基本概念
移动副 P:两个构件之间相对运动为平动
机械系统---机构学---基本概念
万向铰(虎克铰) U:两个轴线垂直相交的转动副构成 球铰 S = 三个轴线垂直相交的转动副构成
机械系统---机构学---自由度分析
螺旋理论基础
UPU分支运动螺旋系:
$1 1 0 0 ; 0 0 0 转动副: $ s ; r s $2 0 1 0 ; 0 0 0 $3 0 0 0 ; 0 0 1 移动副: $ 0 ; s
$4 0 1 0 ; a4 0 0 $5 1 0 0 ; 0 b5 0
r
$ r (1 $1 2 $2 n $n ) 0
$ r $n 0
物理意义:互易积为零的两个螺旋,一个表示物体运动,一个表示物体受到
的约束力,则互易积就是力螺旋对运动螺旋所作的瞬时功,如两个螺旋的互易积 为零,则表示力螺旋不能约束运动螺旋代表的瞬时运动。
机械系统---机构学---自由度分析