动中通卫星通信天线系统组成及原理分析
国内动中通系统技术介绍

国内动中通天线自跟踪技术介绍1 动中通卫星通信系统的组成 (1)2 动中通天线跟踪方式介绍 (2)2.1 精确指向跟踪系统 (2)2.2 单脉冲自动跟踪方式 (3)2.3 混合跟踪方式(差分GPS) (3)3 动中通惯导比较 (4)1 动中通卫星通信系统的组成动中通卫星通信系统主要由天线自动跟踪系统和常规卫星通信系统两大部分组成,其中天线自动跟踪系统是关键技术。
2 动中通天线跟踪方式介绍目前,国内动中通系统天线自动跟踪系统有三大类:1精确指向跟踪系统;2单脉冲自动跟踪系统;3混合跟踪系统(差分GPS),这几种方式根据其技术特点,应用范围有所不同,分别介绍如下:2.1 精确指向跟踪系统精确指向跟踪方式根据车辆运动过程中位置(经度、纬度、高度)及姿态(航向角、俯仰角及横滚角)等参数,计算出天线指向卫星的方位角,俯仰角和极化角。
该系统要求陀螺惯导系统精度高,稳定性好(不漂移),但不能解决卫星定点位置的漂移问题,因而此种方式的优点是不需要捕获引导,可实现盲対星,不怕遮挡(但卫星通信本身还是怕遮挡的)。
但缺点是高性能高稳定度陀螺惯导(法国进口光纤惯导)价格昂贵,而且不能解决卫星定点位置的飘移,因而跟踪精度稍低。
经过国内相关机构多次调研和实际测试,在相同精度的陀螺设备中,激光陀螺比光纤陀螺的漂移累计周期短,一年内需进行多次相校。
进口光纤陀螺稳定周期长,漂移累积小,一般选用OCTANS法国高精度光纤陀螺惯性导航系统作为该跟踪系统的测姿部件。
相关指标如下:2.2 单脉冲自动跟踪方式单脉冲自动跟踪方式是跟踪卫星的信标,其主要的技术特点是利用单脉冲精密跟踪技术,实现卫星通信天线在移动载体上对卫星的精密跟踪。
因而主要的优点是跟踪精度高,不怕卫星漂移(由于受太阳和月亮引力的影响,静止卫星会在一个与地球赤道平台夹角不断变化的倾斜轨道上运行。
假设卫星轨道的东西位置保持不变,则从地球显道表面观察卫星的日漂移轨迹是一个对称于同步静止卫星轨道位置的“8”字形)。
动中通

动中通
随着卫星通信技术的迅猛发展,卫星通信系统已成为一种移动
通信的良好手段,它具有通信距离远、通信质量可靠、通信迅速、
受环境影响小等特点,已逐渐受到人们的青睐。
近年来越来越多的
军用和民用移动通信设备上安装有动中通,实现与地面的远距通信,该终端是非常适合于陆地和海洋应用。
动中通工作原理是利用卫星的无缝覆盖实现移动地球站之间的
远距离通信,在任何时间、任何地点开通并投入使用,满足处理紧
急突发事件的需求。
雅驰实业研发的动中通天线产品系列,在使用过程中,可以保
证在车、船、飞机等载体运动中,始终高精度对准所使用的同步卫星,始终保证高精度、宽带的通信。
且所研发的产品可以利用惯性
导航系统建立一个坐标基准,通过前馈控制伺服系统,使卫星天线
稳定在坐标基准中,不受到载体运动的干扰。
动中通具有以下特点:
1.非常高的带宽
2.全球覆盖
3.在陆地上,海上或空中使用
4.完整的系统
5.卫星连接,即时自动恢复
1 / 1。
动中通卫星通信天线系统组成及原理分析

动中通卫星通信天线系统组成及原理分析摘要:动中通天线系统主要用于移动载体移动条件下实时通信,满足处理突发紧急事件的需求。
本文提出惯导跟踪式动中通卫星通信车载天线系统的组成,对工作原理进行了分析。
惯导跟踪式的动中通天线系统不依赖于任何外部信号,利用惯性导航系统自身即可完全实现自主对星,在移动载体移动过程中也能够进行实时对星和换星,灵活性高。
关键词:动中通,惯性导航,天线,卫星通信概述动中通卫星通信天线系统主要用于车辆等载体在快速移动的条件下,保持对卫星实时跟踪,使车载卫星天线始终对准地球同步通信卫星,在地球同步通信卫星与卫星地面站之间构建双向链路的卫星通信,以达到实时、不间断与其他地面站进行图像、语音、数据的卫星通信双向传输。
动中通卫星通信车应用动中通卫星通信天线系统跟踪卫星,利用卫星通信的无缝覆盖,加上所具备的机动灵活和行进间通信的特点,可以使动中通卫星通信车在任何时间、任何地点开通并投入使用,满足处理紧急突发事件的需求。
动中通卫星通信天线系统是实现动中通车载站的核心,天线面通常采用偏馈或正馈面反射的抛物面天线,外形呈球状,相对于相控阵天线来说,其天线增益较高,旁瓣特性较好,可以跟踪制导系统控制天线的方位和俯仰指向。
1 天线系统主要分类一般来说,动中通卫星通信天线系统主要采用以下两种技术实现对星跟踪:(1)单脉冲跟踪式:利用多个方向上卫星通信信号强弱的和差关系,在短时间内判断出天线指向的偏差,即时调整卫星天线的指向,保持对通信卫星的跟踪。
(2)惯导跟踪式:利用惯性导航系统建立一个坐标基准,通过前馈控制伺服系统,使卫星天线稳定在坐标基准中,不受到车辆载体运动的干扰,始终对准通信卫星。
单脉冲跟踪式动中通卫星通信天线系统由于依赖卫星信号进行对星跟踪,因此存在以下问题:图动中通卫星通信天线系统组成和信号流程图在卫星信号受到遮挡时容易丢星,如途经隧道、桥梁等情况下,被楼宇、大树等遮挡的情况下,都难以保持正常通信;在没有卫星信号的时候无法进行初始对准卫星,在车辆载体行进中无法进行初始对准卫星;在车辆载体大动态情况下,对星跟踪精度差,容易丢星。
动中通天线的设计分析

动中通天线的设计分析河北省专网通信技术创新中心河北石家庄050200摘要:机电结合动中通天线是将机电技术与通信技术相结合,以达到高效率、高增益、低损耗和低成本的目的。
采用机电结合的方式,可提高天线的效率和增益。
本文介绍了机电结合动中通天线的设计方法,包括机械结构、馈电网络和机电耦合方式,并通过对该方案进行分析计算,指出了该方案具有较高的性价比和良好的应用前景。
关键词:机电结合动;动中通天线;设计天线是通信系统的重要组成部分,它把无线电波能量转换为电磁波能量并辐射出去,是无线通信系统的“眼睛”和“耳朵”。
天线的性能取决于所用材料和结构形式,天线的效率、方向性和增益是天线设计中最重要的参数。
因此,天线设计研究的重点之一就是要对天线进行有效地优化设计。
1.天线结构形式的选择天线结构形式是影响天线性能的一个重要因素,不同结构形式的天线在相同条件下的工作效率和增益也会有所不同。
因此,根据实际要求对天线的结构形式进行选择,是实现机电结合动中通天线的关键。
对于小型移动通信系统,一般采用微带形式的单极子天线;对于中型移动通信系统,采用微带偶极子或微带贴片天线;对于大型移动通信系统,采用微带全向天线或宽带微带天线。
在实际应用中,动中通天线可采用微带线或宽带微带线等结构形式,对于通信距离较远的中继信道,宜采用高增益、大功率、大带宽的全向天线。
本方案中所选用的动中通天线是一种单极子单微带天线,其带宽为150 MHz,增益为10 dBi。
1.1天线结构动中通天线的结构形式可采用以下几种方式:单极子单微带天线、单极子多微带天线、微带线多微带天线和微带线偶极子等。
在本方案中,选择的是单极子单微带天线。
单极子单微带天线由贴片和缝隙两部分组成,缝隙采用印刷电路加载,贴片则是由覆铜板切出的薄带状结构。
1.2馈电网络的设计动中通天线的馈电网络一般由馈电网络放大器和功分器组成。
由于该天线工作在2.4 GHz,而馈电网络放大器工作在200 MHz,因此,天线与馈电网络放大器之间的匹配网络是一个难点。
动中通卫星通信系统

动中通卫星通信系统同步卫星的移动通信应用俗称“动中通”,是当前卫星通信领域需求旺盛、发展迅速的应用。
“动中通”除了具有卫星通信覆盖区域广、不受地形地域限制、传输线路稳定可靠的优点外,真正实现了宽带、移动通信的目的。
“动中通”卫星通信系统由中心站和“动中通”用户站组成,系统的网络拓扑结构以星状网为宜,中心站为固定地面站。
“动中通”用户站根据移动载体的区别可以是船载站、车载站(列车、汽车)、机载站,通过“动中通”用户站可以实现与中心站之间的双向数据、话音、图象传输。
“动中通”在铁路系统主要应用在客运列车的通信方面,装备“动中通”卫星通信系统后,在客运列车上可以开通卫星电视,装备车载电话厅,也可以用专用车厢,装备几间移动办公室,因为有Internet接入和电信通道,移动办公室内可配备计算机,电话,传真机。
“动中通”卫星通信的主要技术特点传输容量较大:可以实现几十——几百kb/s信息速率传输。
不平衡传输:接收DVB卫星广播信号和Internet接入。
单向接收:接收卫星电视广播系统组成“动中通”卫星通信系统由中心站和“动中通”用户站组成,系统的网络拓扑结构通常为星状网、也可以为网状网结构。
中心站与其他卫星系统主站相似,根据系统提供的业务要求设计、配置软件和硬件,并与地面网络连接,包括地面电话交换网、Internet地面接入口等。
“动中通”用户站由卫星接收和发射设备分系统、“动中通”天线伺服分系统组成,“动中通”天线伺服分系统是本项目应用的核心部分,通过其对选择卫星的跟踪功能,始终保持对准卫星转发器,实现信号的接收和分发。
卫星通信分系统卫星通信系统选择Ku频段,以获得较小的天线口径和较高的天线增益。
设备主要由收发信机和调制解调器组成,通信终端可以和以太网相连,提供数据应用和Internet接入;与话音网关连接,提供VoIP电话。
天线伺服分系统车载“动中通”Ku波段0.8米卫星天线,可在车行进期间始终高精度地对准所使用的同步通信卫星,实现高质量的通信。
动中通卫星车系统介绍及关键技术的探讨

来越得到 多方的 关注 ,而且 已经在 军用和 民用等领 域得到越 来越广泛
的应用。
关键 词 : 中通 卫 星 自动 跟踪 卫 星通 信 动
动中通系统工作原理 : 载体在移动 到惯导跟踪方式。 同时, 利用先 I & E E IO F R AIN /i = 6 w r c I 1 月I D T LV INN O M T /  ̄ / 9 Ⅳ i . 2 年 O R S I O r /
- 专 / 题/ 敦术
Ne wor e hn og I 。 t k T c ol yI 。 。 一
跟踪, 这两种跟踪可根据现场情况自 绍—下卫星天线和自动跟踪系统的现有技 通卫星天线系统时所需要的技术要求: 动切 自 跟踪方式工作; 与此同时, 惯导系统也
从目 前动中通所采用的天线产品来看, 专门为移动式卫星车设计的K波段收发 u
进入工 作状态, 并不断输出天线极化、 主要分为两大类: 方 一类是以电扫描为主的;
过程中, 由于其姿态和地理位置发生变化 卫星通信系统传输广播电视信号, 达到现
会引起原对准卫星天线偏离卫星, 使通信 场转播效果。
从技术角度上来讲, 如果采用抛物面
天线的话, 所实现的技术手段有三种方式,
中断, 此必须对载体的这些变化进行隔 因
动中通 卫星车系统主要是由承载车、 主要解决两个问题: 动中通主要要解决载
一无线技术 / /
Ne wor e n og / t kT ch ol y/
动 中通卫星车系统 介绍及关键 技术 的探 讨
文/ 温州广播电视传媒集团 林剑 许一峰 / /
摘要 : 于同步轨道卫 星的移动通信 系统俗称动 中通 , 基 它是利 用双载波
航天科技集团704所III型天线系统介绍
III型动中通卫星天线系统介绍航天科技集团七〇四所移动卫星通信项目部目录1 概述 (3)2 技术性能 (4)3 工作原理 (6)4 设备成套 (8)5 安装调试及使用维护 (8)1 概述1.1设备名称:Ku频段III型动中通卫星天线1.2设备型号:YW10-221.3设备用途:III型动中通卫星天线系统为用户实现车辆等卫星地面站载体在移动中进行不间断的卫星通信,系统工作于Ku频段使用同步轨道卫星(包括我国的军用和民用通信卫星)转发器资源,可与卫星地面站之间进行实的得到卫星通信包括语音、数据、图像等多媒体信息的传输。
该天线系统性能上具有增益高、频带宽、外形轮廓低、抗临星干扰等优势,具有信息种类多、容量大、机动灵活、覆盖面广等特点;适合军用和民用通信中应急移动通信和突发事件现场的指挥通信,尤其对部队隐身、防御战役指挥和应急通信指挥系统等应用具有重要意义。
1.4设备组成平面型单脉冲卫星天线系统天线控制器及配套电缆图1 天线外形2 技术性能2.1 天线电性能工作频段:发射14.0GHz~14.5GHz;接收12.25GHz~12.75GHz增益:发射35.8dBi接收35.2dBi极化方式:线极化(极化角±90°可调)驻波比: VSWR≤1.35:1交叉极化隔离度:≥35dB(轴向)收发端口隔离度:≥90dB(收发:含阻发滤波器)第一旁瓣:≤-16dB图2 天线微波暗室近场测试结果■-俯仰波束■- 方位波束2.2 伺服跟踪性能天线运动范围:方位 360°无极限俯仰 0°~+90°天线运动速度:方位速度≥150º/s,加速度≥200º/s2俯仰速度≥80º/s,加速度≥60º/s2汽车行驶速度:≤120km/h驱动方式:电动极化调整方式:自动极化跟踪天线高度(含天线罩): 280mm;占用车顶面积1300×1300mm2;跟踪方式:自动跟踪跟踪精度:优于1/8波束宽度天线开通时间:小于3分钟再捕获时间:小于5s(目标丢失20分钟内)重量:馈源、天线面及天线座架(含驱动部分)57kg 2.3 天线控制性能天线控制设备采用19英寸标准机箱,高度不超过2U;具有如下控制功能:a)自动采集载体所处位置的经度、纬度和载体的方向,显示天线的方位角、俯仰角;b)能够存储5颗以上卫星的星位参数;c)定位采用北斗和GPS两种方式;d)够根据输入的数据,自动控制天线对准卫星;e)具有两种跟踪卫星方式:实时自跟踪、手动跟踪;f)具有记忆功能,掉电保护功能;g)具有自检功能;h)能够接受站内监控的控制与管理,接口形式: LAN重量:馈源、天线面及天线座架(含驱动部分)65kg天线控制设备5.8kg可靠性和可维修性: MTBF ≥2000hMTTR ≤0.5h2.4天线环境适应性指标风载荷:天线罩≤55m/s不破坏(相对风速)温度:工作温度 -15℃~+45℃(车内设备)-40℃~+55℃(车外设备)贮存温度 -50℃~+70℃相对湿度:工作湿度(95±3)%非工作湿度:100%电源: AC 170-255V;交流电频率:50Hz 3Hz伺服控制单元(ACU):支持直流供电,DC 24±5V3 工作原理III型动中通卫星天线满足用户“低轮廓、高增益、低成本”的使用需求,系统设计为平面型、单板收发共面、单脉冲自跟踪的形式。
神通型动中通相控阵卫星天线

神通型动中通相控阵卫星天线北方神通,北京,通信技术有限公司神通?型动中通相控阵卫星天线系统产品描述:神通?型Ku卫星双向相控阵天线是国内卫星通信的革命性的、划时代的突破产品,神通?型的超薄(24cm厚度)相控阵天线系统是专为运动载体(飞机、火车、汽车、轮船)的“动中通”实时通信而设计的。
全新理念的天线系统自动搜索、捕获指定的卫星信号,并且在运动载体高速运动过程中,自动控制方位、仰角和极化角,自动跟踪并保持精确指向。
神通?型卫星双向相控阵天线具有非常广泛的应用,特别是应急通信,因为它可以为公共安全部门和第一响应单位提供高速移动的宽带卫星通信链路,不依赖于易受服务中断、自然灾害和人为破坏所影响的地面通信链路。
也由于它不依赖于地面网络,它可以应用于任何需要的领域,特别是那些偏远的、无电信运营商服务覆盖到的地区和专有军事领域。
产品适用领域有:应急体系、军队、武警、公安、国安、消防、交通、能源、环保、自然资源、运输等各行各业。
系统组成:神通?型由超薄的安装于移动载体的相控阵天线和内部的控制器组成。
外部安装天线内置BUC(可外置以增加发射功率)和LNB,控制器为天线提供电源并控制相控阵天线的运动。
系统特点:, 全自动对星;, 采用GPS信号,自动捕获并跟踪卫星(无GPS时可自动盲扫), 运动中自动寻找卫星信号最大值;, 控制系统可以使之快速从视线遮挡中恢复,天线使用机械和电子混合扫描,保持指向精度;, 邻星干扰保护:如果天线指向偏离大于0.5度,发射链路自动关闭,直到指向误差被天线的跟踪系统纠正。
, 设备采用标准机架安装,同时优化设计适用于移动载体,易于安装和维护。
北方神通,北京,通信技术有限公司神通?型性能指标1. 天线主体型号:ST-2K技术指标:频率范围: 极化调整误差: <1?发送: 14.0-14.5 GHz 天线单元:接收: 12.25-12.75 GHz 尺寸: 1360×1200×248mm(L×W×H)数据速率:重量:?40Kg 发送(回传链路):64kbps,4096 Kbps电性能指标 (外置40W BUC)(根据不同的卫星和地区会有变电源: 30VDC化) 功耗: ?70W 接收(前向链路):大于15 Mbps电源接头: TNC 增益:TX: 33.5dBi 射频接头: TNCRX: 33.5dBi 机械性能指标极化:线极化/圆极化(自动控制)俯仰范围: 20? - 70? 上行 EIRP: 49.5dBw(40w BUC)G/T: 9 dB/K @30度方位范围: 360?连续旁瓣电平:<-14dB 跟踪速率: 60?/s 交叉极化:,27dB极化范围: -90º , +90º IF输入/输出: L频段950-2050MHz工作温度 : 捕获和跟踪:信号捕获并锁定:自动,<60秒天线主体单元: -40?,+55?C极化角调整:自动贮存温度: -50º ,+70ºC 跟踪速率: 45?/秒相对湿度: <90% 重新捕获: <20秒仰角捕获误差:<0.3? 运动速度: ?350 Km/h极化角捕获误差:<0.35?北方神通,北京,通信技术有限公司2. 天线控制器天线控制器作为系统的室内单元,主要完成供电,给天线提供控制信号,以及完成人机操作等工作。
动中通卫星通信系统解决方案

平板动中通通信系统方案车载平板动中通天线是专为应急指挥通信市场开发,该产品已被军队、武警、公安、消防、应急、电力等多个行业采用,性能稳定可靠。
该平板车载系统相比传统抛物面天线系统有如下特点:系统可在静态、动态、斜坡等状况下实现上电全自动寻星、锁定;系统采用高增益的平板波导阵列天线,使系统具有较高的增益,确保高清图像及数据的传输,并且降低了天线的整体高度(≤355mm),非常适合SUV 车,保证车辆行驶的通过性和美观性;采用高精度惯性系统作为控制基础,使产品具有较高的跟踪精度和较长的遮蔽保持时间;系统采用卫星信标跟踪技术与传感器误差修正技术相结合的闭环控制方式,提高系统的工作可靠性;产品采用模块化设计,内部部件采用模具铸造,大大提高了生产效率和可维修性;自动寻星:系统设置后,全部操作均可自动完成,并能够在静态或运动条件下进行上电初始化、初始对星等操作;自动跟踪:在动态条件下,方位、俯仰、极化全自动跟踪,使天线始终对准所选目标卫星;遮挡后再捕获:当天线长时间被遮挡而导致丢星,遮挡消除后系统可快速恢复(遮挡20分钟恢复时间<2s);天线安装无方向要求,可随意方向安装,具有很高的平台安装适应性;本系统对星时间短,冷启动在80秒内,热启动在50秒内。
(无遮挡情况下);天线系统高度集成,整机重量≤75Kg。
车载系统设计原则如下:通得快。
选用机动性好的平台,在各种恶劣条件下,以最快的速度达到任务地域,快速建立通信联络,保障现场应急指挥顺畅。
通得上。
综合多种通信手段,针对不同保障需求,形成能力互补手段融合,确保在各种复杂环境下全方位、全天候通信。
通得好。
根据应用需求,新研一些新技术通信装备,同时选用成熟、先进的民用新技术设备,确保通信效果和质量。
标准化。
采用标准化的通用装备和民用成熟技术设备进行综合集成,确保技术体制统一,实现“军、警、民”各方通信互联互通。
组合化。
采用模块化结构,搭建组合化的通用车载平台,便于升级和换装,以满足不同突发事件的保障需求。
科技成果——动中通卫星通信系统
科技成果——动中通卫星通信系统技术开发单位北京航天万鸿高科技有限公司东莞分公司技术概述动中通卫星通信系统采用我所惯性导航和伺服控制等自主技术,实现了移动载体在运动中实时不间断传输语音、数据、视频图像等信息,是卫星通信领域一次重大技术突破。
主要技术指标动中通对星和跟踪需要天线极化轴对准通信卫星,通过实时调整天线的方位角和俯仰角来实现。
我单位动中通采用惯性导航系统(采用高精度陀螺和石英加速度计)实时精准和解算载体三个坐标轴的角速度姿态以及载体位置,通过高精度伺服系统进行天线的方位角和俯仰角的实时调整,实现天线的对星和跟踪。
自主对星:利用惯性导航系统完全实现自主对星,不依赖任何外界信号,静态对星时间≤60s;盲区对星:在没有卫星、GPS信号等情况下(如车库、船坞内),可以进行对星;行进中对星:在载体移动过程中能够进行动态对星,行进中对星时间≤3min;动态换星:可以在载体运动状态下切换通信卫星;抗遮挡与抗颠簸功能:载体剧烈颠簸时,通信不受影响;动态跟踪性能好:在载体大动态转向情况下通信正常,如绕“0”字每圈<8s,绕“8”字每圈<20s;可靠性高:系统中的部件和元器件具有严格的质量保证,核心技术均具有自主知识产权和生产线。
先进程度国内领先技术状态批量生产、成熟应用阶段适用范围直升机、无人机应急通讯系统无人船载通信系统森林防火与抢险救灾高速列车宽带多媒体收发系统重大事件、灾害应急通信系统电信运营商应急保障系统消防、人防等其它领域应用电视移动转播系统军队数字化信息化指挥系统武警移动通讯网络系统公安防爆反恐指挥车合作方式合作开发预期效益自2006年交付首套动中通系统以来,经十余年技术创新,开发出宽带双频、高集成度和多通信体制融合的系列化产品,仅去年一年即实现收入达3亿元。
动中通卫星通信系统可为大型阅兵、运动会、博览会、环球会议等重大活动做通信保障,可执行地震、水灾、暴恐活动等事件的救援维稳保障任务,可在无人地区、海域实行开发和探测。
动中通卫星通信系统若干技术问题探讨
舸
39
卫 星通 信分 系统
:
天线座
:
跟踪接收机分系统
姿
分系 统
电源分 系统
图1 动 中通 卫 星通 信 系统 的 基 本 组 成
帅 ◆
维普资讯
口
专家论坛 尊
若 已知 天线一 d 波束宽度为2 0 2 o 天线跟踪误 差角为△ △0 3B 0 0 s 5 e 时,引起天线增 益的下降可用下式近似表 示:
.
40
降0 4d , 当天线 跟踪精度提 高 至0 1。 时,天 线增 益下 .8 B . 9 降为0 1d 。 . 2B 由此可见,天线跟踪精度提 高,天 线增 益下降变小 ;但 若 天 线跟踪精 度 要求过 高 ,天线增 益增加 不 大,对 通信 效 果 的变化并 不十分 明显,但 系统 的造价 却会提 高很 多 。需 要首先确定 系统的跟踪精度要求 。 我国动中通卫星通信 的公 安行 业标准G / 58 2 0 公 A T 2— 0 5“ 安 车载 应 急通信 技 术 规 范 ” 中规 定 : 平 均 跟 踪精 度 要 求
维普资讯
维普资讯
SATNE T
动中通卫星通信 系 统 目前 已在 战场 移动指挥 、战场 目标侦察 、森林 防火 、防洪救 灾、 反恐移 动通信指挥 、移 动电视转播、火车卫星 电视广播、大型客轮移动多媒体通信等许多方
O3 2 o 。,即 ? -03 -(0 ) 小-f? .倍天线半功率波束宽度。 s
此时,天 线增 益降低 约1 1B .d 。 目前 ,通 常采用 的跟踪方 式有 3 :精 确指 向方 式、信 种 标 跟踪方 式以及 混合跟踪方 式。
32 精 确 指 向方 式 _ 321工 作 原 理 _. 所谓精确指 向方 式即是利用静止 卫星相对 于地球是不 动 的特 点而产 生 的,其工 作原 理是 不管 载体 如何 运 动,其上 的卫星通信 天 线波束始终指 向卫星。
0.9米Ku平板动中通天线(20170117)
0.9米Ku平板动中通天线
一、系统组成
平板动中通卫星通信天线系统由天线单元(包括塑料平板天线面、波导馈电网络),天线罩,惯性测量系统,伺服控制系统(包括转台、高频关节、电机及驱动器、位置传感
器),控制主机,信号、控制及电源接口组成,具有效率高、结构轻便、跟踪精度高等特点。
二、系统特点
1.天线电性能优越。
2.塑料电镀喇叭阵天线:可快速批量生产,重量轻,增益高。
3.不依赖GPS信息:采用卫星信标跟踪修正陀螺误差,无需GPS信息仍能正常工作(只需在
初始对星前手动输入一次当地经纬度即可)。
4.初始对星快:GPS/BD模块冷启动定位对星时间<80s,热启动(或手动输入)<60s。
5.跟踪精度高:无遮挡情况下,跟踪误差<0.5dB(RMS)。
6.稳定效果好:方位采用闭环稳定算法,快速转向或者“S行进仍能精确跟踪卫星。
7.遮挡恢复时间快:遮挡时间<5min,恢复时间<3s;遮挡时间<20min,恢复时间<5s。
8.卫星切换迅速:不同卫星之间的切换时间<8s。
9.使用方便:可实现行进间的动态对星,动态切星等功能。
10.便于维护:系统模块化设计,接口规范简洁,故障诊断与维修便捷。
11.使用安全、绿色环保:采用24V直流工作,功耗V150W,整机重量87Kg。
12.方便集成:对外接口仅有4个,分别为数据输出、直流供电、中频接收和中频发射,连接
关系简单。
三、技术参数
四、产品展示
五、包装方式
六、装车要求
厂—
nrtiuft n尸0[~L口T LXII'H
負戌〔N即」N-imT
7B
D
七、装箱及附件清单。
“动中通”移动卫星电视直播系统

●天线指向范围 :方位角 ;转角不限 ;仰 角 2 0 。 - 9 0 。 ; ●转台最高跟踪转速 :3 0  ̄ / s ;
俩服 系统组成碌理 臣
・静态对星精度 :0 . 1 0 。 ; ・动态跟踪精度 :0 . 2 。
●初始对星时间 :≤ 1 8 0 s ;
● 重 捕 时 间 :≤ 1 0 s ;
稳定控制与导航计算机、伺服转 台、天线 、信标接收机 、主 控计算机 、G P S接收设备 、手动调整控制器。天线伺服系统 组成原理框图见图 2 。
接收 :1 2 . 2 5 G H z - 1 2 . 7 5 GH z 。 b . 传输 比特率
可调 : 4 : 2 : 0 1 Mb p s ~ 1 5 Mb p s ;4 : 2 : 2 2 . 5 Mb p s - 5 0 Mb p s ;
总之 , 在天线伺服系统中有三个措施保证天线对星跟踪 。 首先是惯性组合及导航系统 ,它起到 了瞬态和短周期稳定作 用;第二是 G P S与惯组构成组合导航系统 . 修正抑制惯组漂 移 ,在长时间范围内 ,保证天线 对星 的较 为准确的跟踪;第 三是信标修正 ,它构成 了整个天线稳 定系统 的最终闭环。在
/
f
/l 倒南 外 l J
I J l  ̄ i 机U U 机 +
●天线增益 :接收 4 2 . 5 + 2 0 1 g( f / 1 2 )d b ;发射 4 3 . 6 + 2 0 1 g
.
f f / 1 4)d b:
・
露
赣 霪 隧 』 黼 霆 辫瀚 翳 雾 霪
{ !
/\ /
・ +
c . 调制解调方式
MP E G一 2 / DVB— S。
“动中通”卫星通信链路分析及优化研究汇总

“动中通”卫星通信链路分析研究摘要:本文针对通信卫星“动中通”系统为研究对象,从其结构的组成,发展现状和影响卫星链路的因素等为对象进行介绍和分析,详细的从结构、功能等方面探讨。
“动中通”卫星主要是由天线、馈源、反射面和转轴这几部分组成的。
为了能更好评估卫星信号的好坏,需要长时间的监视观测,通过观测数据研究卫星链路传输的性能;通信卫星“动中通”在链路的传输上,实现了Ku频段的链路传输特性,通过自动检测系统代替了以往人工测量的方式,通过自动检测系统的精确测量,和以往人工测量相比,大大减小了数据误差,提高了测量的精确度并提高了工作效率,节省了人力资源。
关键词:Ku频段;卫星通信;链路Analysis of Satellite Communication Link in the "Satcom onthe Move"Abstract: In this paper regarded the satellite communication system as the research object. Discussion from the structure, function and other aspects in detailed, analysis the composition of the structure, development status and influence of the satellite link factors as the object of introduction. "Move through" satellite is mainly by the antenna and feed, the reflecting surface and the shaft which are composed, the parabolic cylinder antenna box to receive data of role, the data processing. Through the feed antenna and the reflector will data in the transmission to the original user, to work through the coordination of the internal rotating shaft and other parts. In order to better evaluate the satellite signal is good or bad and need to long time observation, for surveillance, through the observation data of satellite transmission link performance; communication satellite mobile communication in the transmission link, the realization of the Ku band link transmission characteristic. In order to improve the precision of the measurement, the work efficiency and saving human resources, the automatic detection system instead of the previous manual measurement, comparison to the accurate measurement of the automatic detection system, and in the past manual measurement, greatly reducing the error data.Keywords: Ku band; satellite communication; link引言自1960年到现在,卫星的发展取得了翻天覆地的变化,各种类型和功能的卫星被研发出来并应用起来,而卫星通信作为其中最为重要的一个分支,在通信领域起到了重大的作用。
动中通天线自动跟踪系统结构及刚度研究
动中通天线自动跟踪系统结构及刚度研究摘要:“动中通”天线自动跟踪系统,采用两轴稳定平台,安装一个抛物面环焦天线。
具有ka和ku两个波段。
在车辆运动或静止时,天线实时跟踪同步地球卫星,实现地面车辆和卫星通讯。
本文介绍结构设计、系统刚度研究等方面关键技术。
系统采用A-E型双轴转台的通用结构形式,方位轴、俯仰轴可以自由转动,俯仰轴承载一个支撑座,天线、IMU及其控制电路安装在支撑座上。
天线极化方向通过控制馈源旋转解决。
系统采用等刚度设计原则,为了提高结构刚度,降低重量,选用比强度和比刚度高的材料;优化设计结构形状,合理布置各搭载部件的位置,减小转动体的转动惯量;对转动轴进行静平衡设计,使质心落在轴心,减少配重块的质量;采用合理的散热措施,避免赋形环焦天线局部受热变形。
关键词:“动中通”;稳定平台;自动跟踪;刚度1.概述1.1国内外研究动态“动中通”天线自动跟踪系统,在车辆运动或静止时,控制天线实时跟踪同步地球卫星,实现运动车辆和同步地球卫星信号传输。
“动中通”系统工作原理是,车辆在移动过程中,由于其运动姿态和地理位置发生变化,会引起卫星天线偏离卫星,使通信信号减弱甚至中断,因此必须对车体的这些变化进行隔离,同时通过卫星上信标信号完成天线漂移修正,使天线始终对准通讯卫星,实现移动状态下的不间断通讯[1] [2]。
目前国内外研究和生产动中通的单位较多,主要研制单位有:重庆航天新世纪卫星应用技术有限责任公司、重庆巴山仪器厂、中电集团第39研究所、航天恒星科技股份有限公司、北京爱科迪信息通讯技术有限公司等。
1.2 系统组成“动中通”天线自动跟踪系统由赋型环焦天线、稳定平台、控制部分组成。
里程计信息、GPS信息由总体提供。
赋型环焦天线安装在稳定平台上。
稳定平台对于“动中通”系统是至关重要的,必须严格隔离车体角运动,隔离程度越高越好。
稳定平台采用A-E两轴结构,包括方位环和俯仰环,每个环上装有旋转变压器和力矩电机。
动中通天线(80W)
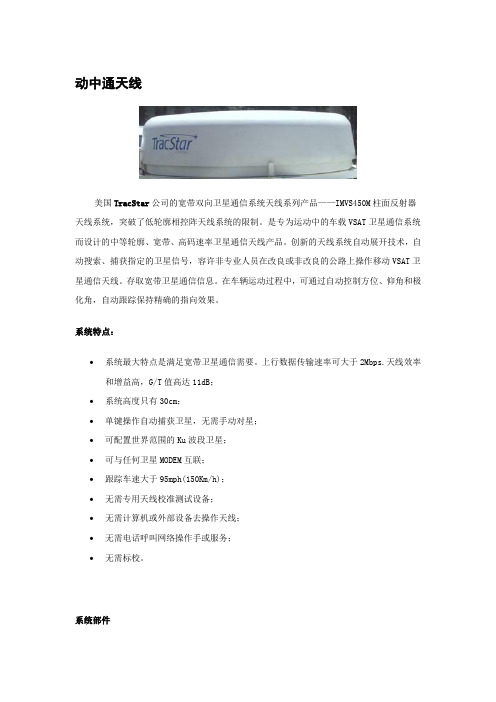
动中通天线美国TracStar公司的宽带双向卫星通信系统天线系列产品——IMVS450M柱面反射器天线系统,突破了低轮廓相控阵天线系统的限制。
是专为运动中的车载VSAT卫星通信系统而设计的中等轮廓、宽带、高码速率卫星通信天线产品。
创新的天线系统自动展开技术,自动搜索、捕获指定的卫星信号,容许非专业人员在改良或非改良的公路上操作移动VSAT卫星通信天线。
存取宽带卫星通信信息。
在车辆运动过程中,可通过自动控制方位、仰角和极化角,自动跟踪保持精确的指向效果。
系统特点:∙系统最大特点是满足宽带卫星通信需要。
上行数据传输速率可大于2Mbps.天线效率和增益高,G/T值高达11dB;∙系统高度只有30cm;∙单键操作自动捕获卫星,无需手动对星;∙可配置世界范围的Ku波段卫星;∙可与任何卫星MODEM互联;∙跟踪车速大于95mph(150Km/h);∙无需专用天线校准测试设备;∙无需计算机或外部设备去操作天线;∙无需电话呼叫网络操作手或服务;∙无需标校。
系统部件(1)天线IMVS450M天线系统包括柱面反射器、极化调节器、无源RF部件和天线罩组成。
(2)远程位置调节器远程位置调节器是一个机电一体化的组合件,在规定的速度和加速度要求下使天线波束指向期望的卫星,远程位置调节器有马达、驱动部件、角位置反馈器件、速度反馈器件以及需要的结构件组成,在天线控制器的控制下使天线旋转。
(3)天线控制器天线控制器(ACU)完成控制模式、位置环闭环,极限值监控、故障监控、平台运动补偿以及天线伺服环路补偿。
ACU 可以为每个远程位置调节器马达提供放大的驱动信号,并从每个远程位置调节器反馈器件接收位置和速度数据。
(4)惯性敏感元件惯性敏感元件可以测量移动平台在惯性空间(横摇、纵摇和艏摇)的位置和动态运动并向ACU提供这些数据,以便在卫星捕获、再捕获和正常运转时补偿或隔离平台的扰动。
天线利用综合性的GPS接收机测量移动平台在地面上某一点的位置并把该数据提供给ACU, 让ACU 来确定卫星的角位置。
_动中通_移动卫星通信终端天线跟踪技术_康学海
#现代电子技术∃2007 年第 17 期总第 256 期
通信与信息技术
!d 为差信道辐射场的 极化椭圆 的长轴 相对于 x 轴 的 空间取向:
!d = - { ∃+ t g- 1 [ ( ksin ) / (1 + kcos ) ] } ( 2)
k 为 3 dB 90∀电桥两路输出幅度不平衡因子;
式中: G 为 L NA 增益;
A = PFD ∋ Se , S e 为天线和信道的有效接收面积; PFD 为天线口径处的功率通量密度( EIRP/ 4 d2 ) ; EIRP 为卫星信标的等效全向辐射功率; d 为卫星与地球站天线之间的距离( 约 35 860 ( 103 m) ; !s 为和信道辐射场矢量相对于 x 轴的空间取向;
增益相等时, 则相加器输出端的合成信号可用式( 1) 表示:
ecom =
G 2
A
{
1 L1 ∋
f s ( ) cos( !c - !s ) + m
1
f d ( ) [ exp( j( !c - !d +
L 2 ∋ 2( 1 + b2d )
∀+ #( t) ) ) + bd exp( j( !d - !c + ∀+ #( t) ) ) ] } ( 1)
收稿日期: 2007- 04- 20
线波束偏离卫星, 造成电平下降甚至通信中断。 当载体姿 态变化时, 还会引起天线极化面的旋转。在双线 极化频率 复用系统中还会使电波的交叉极化鉴别率恶化, 并造成同 频道的两个线极化波之间发生相互干扰。
要使装载在 运动 载体 上 的 卫星 通 信系 统 具备 动 中 通 的能力, 必须设法解决以下关键技术:
动中通天线的应用
动中通天线的应用“动中通”是由卫星自动跟踪系统和卫星通信系统两部分组成。
卫星自动跟踪系统卫星自动跟踪系统是用以保证卫星发射天线在车体运动时对卫星的准确指向。
其主要设备有:(1)天线座,采用卸载和储力方式减小天线传动时的负载惯量。
(2)伺服,采用位置环或速度环控制方式,使用模拟硬件提高电路响应速度,减小伺服跟踪系统的动态滞后误差。
(3)数据处理,使用专用的数学解算平台,对误差信号、载体的动态信号进行处理,解算出天线的控制信号。
(4)载体测量,使用捷联惯导测量组合测量出载体的变化量,使其反应在天线跟踪上。
其中,激光陀螺是在光学干涉原理基础上发展起来的新型导航仪器,成为新一代捷联式惯性导航系统理想的主要部件,用于对所设想的物体精确定位。
石英挠性摆式加速度计是由熔融石英制成的敏感元件,挠性摆式结构装有一个反馈放大器和一个温度传感器,用于测量沿载体一个轴的线加速度。
光纤陀螺三轴惯测组合由三个光纤陀螺仪和三个石英挠性摆式加速度计组成,可以实时地输出载体的角速度、线加速度、线速度等数据,具有对准、导航和航向姿态参考基准等多种工作方式,用于移动载体的组合导航和定位,同时为随动天线的机械操控装置提供准确的数据。
主要性能:加表精度1×10-4g;光纤陀螺精度(漂移稳定性)≤1°/h;标度固形线性度≤5×10-4。
卫星通信系统卫星通信系统的作用是使电视信号上行传输到卫星,并由转发器下行传送到地面卫星接收装置。
其主要设备有:编/解码器、调制/解调器、上/下变频器、高功率放大器、双工器和低噪声放大器。
“动中通”系统工作原理载体在移动过程中,由于其姿态和地理位置发生变化,会引起原对准卫星天线偏离卫星,使通信中断,因此必须对载体的这些变化进行隔离,使天线不受影响并始终对准卫星。
这就是天线稳定系统要解决的主要问题,也是移动载体进行不间断卫星通信的前提。
“动中通”自动跟踪系统是在初始静态情况下,由GPS、经纬仪、捷联惯导系统测量出航向角、载体所在位置的经度和纬度及相对水平面的初始角,然后根据其姿态及地理位置、卫星经度自动确定以水平面为基准的天线仰角,在保持仰角对水平面不变的前提下转动方位,并以信号极大值方式自动对准卫星。
0.6m平板动中通

0.6m平板动中通平板动中通卫星通信天线系统由天线单元(包括塑料平板天线面、波导馈电网络),天线罩,惯性测量系统,伺服控制系统(包括转台、高频关节、电机及驱动器、位置传感器),控制主机,信号、控制及电源接口组成,具有效率高、结构轻便、跟踪精度高等特点。
天线特点主要概况为:1)天线电性能优越:a)增益:发射>36.5dBi,接收>35.5dBi;b)交叉极化隔离度:≥30dBc)第一旁瓣:≤-12dBd)驻波≤1.32)塑料电镀喇叭阵天线:可快速批量生产,重量轻,增益高。
3)不依赖GPS信息:采用卫星信标跟踪修正陀螺误差,无需GPS信息仍能正常工作(只需在初始对星前手动输入一次当地经纬度即可)。
4)初始对星快:GPS/BD模块冷启动定位对星时间<80s, 热启动(或手动输入)<60s.5)跟踪精度高:无遮挡情况下,跟踪误差<0.5dB(RMS).6)稳定效果好:方位采用闭环稳定算法,快速转向或者“S”行进仍能精确跟踪卫星。
7)遮挡恢复时间快:遮挡时间<5min,恢复时间<3s;遮挡时间<20min,恢复时间<5s.8)卫星切换迅速:不同卫星之间的切换时间<8s.9)使用方便:可实现行进间的动态对星,动态切星等功能.10)便于维护:系统模块化设计,接口规范简洁,故障诊断与维修便捷。
11)使用安全、绿色环保:采用24V直流工作,功耗<150W, 整机重量78Kg。
12)方便集成:对外接口仅有4个,分别为数据输出、直流供电、中频接收和中频发射,连接关系简单。
附图:外观附表1:技术参数附表2:外形尺寸外观表一(技术参数)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
动中通卫星通信天线系统组成及原理分析
摘要:动中通天线系统主要用于移动载体移动条件下实时通信,满足处理突发
紧急事件的需求。
本文提出惯导跟踪式动中通卫星通信车载天线系统的组成,对
工作原理进行了分析。
惯导跟踪式的动中通天线系统不依赖于任何外部信号,利
用惯性导航系统自身即可完全实现自主对星,在移动载体移动过程中也能够进行
实时对星和换星,灵活性高。
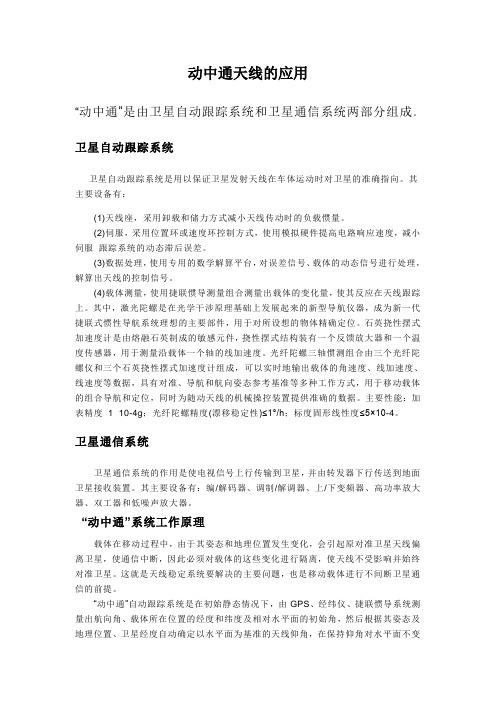
关键词:动中通,惯性导航,天线,卫星通信概述动中通卫星通信天线系统
主要用于车辆等载体在快速移动的条件下,保持对卫星实时跟踪,使车载卫星天
线始终对准地球同步通信卫星,在地球同步通信卫星与卫星地面站之间构建双向
链路的卫星通信,以达到实时、不间断与其他地面站进行图像、语音、数据的卫
星通信双向传输。
动中通卫星通信车应用动中通卫星通信天线系统跟踪卫星,利用卫星通信的
无缝覆盖,加上所具备的机动灵活和行进间通信的特点,可以使动中通卫星通信
车在任何时间、任何地点开通并投入使用,满足处理紧急突发事件的需求。
动中通卫星通信天线系统是实现动中通车载站的核心,天线面通常采用偏馈
或正馈面反射的抛物面天线,外形呈球状,相对于相控阵天线来说,其天线增益
较高,旁瓣特性较好,可以跟踪制导系统控制天线的方位和俯仰指向。
1 天线系统主要分类一般来说,动中通卫星通信天线系统主要采用以下两种
技术实现对星跟踪:(1)单脉冲跟踪式:利用多个方向上卫星通信信号强弱的
和差关系,在短时间内判断出天线指向的偏差,即时调整卫星天线的指向,保持
对通信卫星的跟踪。
(2)惯导跟踪式:利用惯性导航系统建立一个坐标基准,通过前馈控制伺
服系统,使卫星天线稳定在坐标基准中,不受到车辆载体运动的干扰,始终对准
通信卫星。
单脉冲跟踪式动中通卫星通信天线系统由于依赖卫星信号进行对星跟踪,因
此存在以下问题:
图动中通卫星通信天线系统组成和信号流程图在卫星信号受到遮挡时容易丢星,如途经
隧道、桥梁等情况下,被楼宇、大树等遮挡的情况下,都难以保持正常通信;在没有卫星信
号的时候无法进行初始对准卫星,在车辆载体行进中无法进行初始对准卫星;在车辆载体大
动态情况下,对星跟踪精度差,容易丢星。
惯导跟踪式动中通卫星通信天线系统采用惯性导航系统,利用惯性导航系统精确测量出
载体的地理坐标、姿态、航向,通过导航解算,由控制系统实现天线的对星和跟踪。
惯导跟踪式动中通卫星通信天线系统不需要利用GPS、卫星信号、载波信号等信号校正
天线方向,也不受地磁、雨、雪、雾等天气环境的干扰,即使卫星信号被遮挡或者丢失卫星
信号,甚至没有卫星信号,都不会影响天线的指向。
以下分析惯导跟踪式天线系统组成与工作原理。
2 天线系统的组成惯导跟踪式动中通卫星通信天线系统由天线单元、惯性导航系统、天
线伺服系统、稳控计算机、信号、监控及电源接口等组成。
其中,天线单元包括天线、馈源、LNB、波导等,用来与通信卫星传输通信信号。
惯性
导航系统包括陀螺与加速度计,用来获取和提供车辆状态信息及地理位置信息等。
天线伺服
系统包括三轴转台、电机及其驱动器、位置传感器等,用于控制天线系统始终对准通信卫星,实现不间断通信。
2.1 天线单元天线单元安装在一个三轴伺服转台上,由抛物面天线及其馈源、低噪声变频模块、关节、波导等等组成。
低噪声变频模块将天线接受的Ku频段载波转化为L频段,增益可调,具有监控接口。
关节为旋转关节,分别安装在载体卫星通信天线的极化轴、俯仰轴、方位;轴上,使得
天线在三个轴上转动时,不影响Ku频段电磁波的传送。
2.2 惯性导航系统惯性导航系统是动中通卫星通信系统的关键部件,内部包括三只高精度陀螺、三只石英加速度计和相应电路,能够精确和迅速的测量载体航向、姿态和速度,提供
给稳控计算机。
2.3 天线伺服系统天线伺服转台采用三轴转台技术,为外、中、内三轴结构。
外轴控制天线方位,中轴控制天线俯仰,内轴控制极化角。
外、中、内轴上均使用高精
度交流伺服电机。
外轴即方位轴,垂直放置,通过齿轮传动由伺服电机驱动,可以360°旋转。
中轴即俯仰轴,安装在外轴上,控制俯仰角度,角度范围为5°~90°,设有机械和电气限位装置。
内轴即极化轴,控制天线极化角度。
通过外、中、内三轴控制天线方向指向通信卫星,天线极化角度与卫星信号一致。
2.4 稳控计算机稳控计算机实时接收惯性导航系统提供的载体的姿态以及天线伺服系统提供的天线的姿态,经过坐标变换和计算,控制天线伺服系统三个轴转动,实现载体卫星通信
天线的对星和跟踪卫星。
2.5 信号、监控及电源接口信号接口:动中通卫星通信天线系统安装卫星信号上行接口、下行接口为卫星通信提供服务。
上行接口为标准WR75 矩形波导接口,与功放通过软波导,
功放安装在天线系统下方的安装架上,使连接波导小于1 米。
下行接口为标准卫星通信同轴
电缆插座。
监控接口:动中通卫星通信天线系统中配置串口转网口转换器,提供以太网监控接口和
监控协议以便接入动中通车载站的综合网管终端。
能够通过综合网管终端远程控制动中通卫
星通信天线进行对星(静止/行进)、跟踪、微调、换星等等操作。
电源接口:动中通卫星通信天线系统安装交流220V、50Hz的标准电源输入接口(具有
三防功能),天线系统内的直流电源由动中通卫星通信天线内的二次电源提供,无需外界提供。
3 工作原理分析动中通卫星通信天线指向卫星的方向可以用天线极化轴相对载体的方位
角和俯仰角来描述。
这个方位角和俯仰角完全由卫星的位置、载体的姿态及其位置决定。
惯性导航系统采用陀螺和石英加速度计,可以实时精确测量载体三个坐标轴的角速度、
当地重力加速度和地球转速,通过导航解算实时计算出载体的三个姿态角以及载体所在位置,稳控计算机将此信息和伺服系统三个轴的角度信息进行坐标矩阵转换计算,根据计算结果,
稳控计算机给天线伺服系统三个轴发出指令脉冲使天线转动到对准卫星的位置上,实现动中
通卫星通信天线的初始对准。
此过程无论载体处于静止状态和运动状态都可以实现,且不依
赖于卫星信号。
对星完成后,惯性导航系统进入导航模式,实时精确测量载体航向和姿态的变化,经稳
控计算机解算后,控制伺服系统驱动电机维持天线的指向。
4 特点及结论采用惯性导航设备控制的卫星通信天线,不依赖于任何外部信号(不需要
利用GPS、卫星信号、载波信号等信号校正天线方向),也不受外界环境的干扰(地磁、雨、雪、雾等天气环境对惯性导航设备不会产生任何影响),即使卫星信号被遮挡或者丢失卫星
信号,都不会影响天线的指向。
由于惯性导航设备的独特特点,决定了动中通卫星天线具有以下优势及特点:4.1 不依赖任何外界信号,利用惯性导航系统自身即可完全实现自主对星;4.2 在没有卫星、GPS 信号等
情况下(如车库、隧道内),可以进行对星;4.3 在车辆载体移动过程中也能够进行实时对星,灵活性高;4.4 在车辆载体移动过程中能够进行实时换星,不需要重新启动。
参考文献:[1]汤铭,动中通伺服系统的设计,现代雷达.2003 年第25卷第4 期:51-54
页[2]阮晓刚,汪宏武,“动中通”卫星天线技术及产品的应用,技术与应用. 2006 年3 月作者
简介:姚力,出生年月:1975 年11 月性别:男籍贯:黑龙江伊春学历:硕士目前职称:
工程师主要研究方向:动中通卫星通信系统。
徐惠,出生年月:1981 年5 月性别:女籍贯:内蒙古集宁最高学历:硕士目前职称:
工程师主要研究方向:动中通卫星通信系统。
杨新华,出生年月:1985 年7 月性别:女籍贯:山西太原最高学历:硕士目前职称:助理工程师主要研究方向:动中通卫星通信系统。