直角坐标系中的动点问题
初二数学直角坐标系动点问题
初二数学直角坐标系动点问题
问题描述
在数学学习中,直角坐标系是一个非常重要的概念。
通过直角坐标系,我们可
以很好地描述点的位置和运动。
在初二数学中,掌握直角坐标系动点问题是必不可少的一环。
本文将通过几个具体例子来介绍初二数学直角坐标系动点问题。
例题1
问题:在直角坐标系中,点A(3,4)围绕原点顺时针旋转90度,求旋转后的坐标。
解析:顺时针旋转90度相当于将点(x,y)变为(-y,x)。
因此,点A(3,4)围绕原点
顺时针旋转90度后的坐标为(-4,3)。
例题2
问题:在直角坐标系中,点B(1,2)绕原点逆时针旋转60度,求旋转后的坐标。
解析:逆时针旋转60度相当于将点(x,y)变为$(\\frac{x}{2}-
\\frac{\\sqrt{3}}{2}y, \\frac{\\sqrt{3}}{2}x+\\frac{y}{2})$。
因此,点B(1,2)绕原
点逆时针旋转60度后的坐标为$(\\frac{1}{2}-\\sqrt{3},\\sqrt{3}+1)$。
例题3
问题:直线y=2x与y=2-x相交于点C,请问点C的坐标是多少?
解析:点C是直线y=2x与y=2-x的交点,即满足方程2x=2−x,解得x=1,代入任意一个方程可得y=2。
所以点C的坐标为(1, 2)。
总结
通过以上例题的解析,我们了解了初二数学中直角坐标系动点问题的一些基本
概念和解题方法。
在学习数学时,通过练习多个实例可以帮助我们更好地掌握知识,提高解题能力。
希望本文对初二数学直角坐标系动点问题的学习有所帮助。
(完整版)初一平面直角坐标系动点问题(经典难题)

(2)在y轴上是否存在一点P,连接PA,PB,使 = ,
若存在这样一点,求出点P的坐标,若不存在,试说明理由.
(3)点P是线段BD上的一个动点,连接PC,PO,当点P在BD上移动时(不与B,D重合)给出下列结论: 的值不变, 的值不变,其中有且只有一个是正确的,请你找出这个结论并求其值.
5.观察下列有序数对:(3,﹣1)(﹣5, )(7,﹣ )(﹣9, )…根据你发现的规律,第100个有序数对是.
6、观察下列有规律的点的坐标:
依此规律,A11的坐标为,A12的坐标为.
7、以0为原点,正东,正北方向为x轴,y轴正方向建立平面直角坐标系,一个机器人从原点O点出发,向正东方向走3米到达A1点,再向正北方向走6米到达A2,再向正西方向走9米到达A3,再向正南方向走12米到达A4,再向正东方向走15米到达A5,按此规律走下去,当机器人走到A6时,A6的坐标是.
平面直角坐标系动点问题
(一)找规律
1.如图1,一只跳蚤在第一象限及x轴、y轴上跳动,在第一秒钟,它从原点跳动到(0,1),然后接着按图中箭头所示方向跳动[即(0,0)→(0,1)→(1,1)→(1,0)→…],且每秒跳动一个单位,那么第35秒时跳蚤所在位置的坐标是( )
图1
A.(4,0)B.(5,0)C.(0,5)D.(5,5)
(1)汽车行驶到什么位置时离A村最近?写出此点的坐标.
(2)汽车行驶到什么位置时离B村最近?写出此点的坐标.
(3)请在图中画出汽车行驶到什么位置时,距离两村的和最短?
4.如图,在平面直角坐标系中,点A,B的坐标分别为(-1,0),(3,0),现同时将点A,B分别向上平移2个单位,再向右平移1个单位,分别得到点A,B的对应点C,D,连接AC,BD,CD.
七年级平面直角坐标系动点规律问题(经典难题)
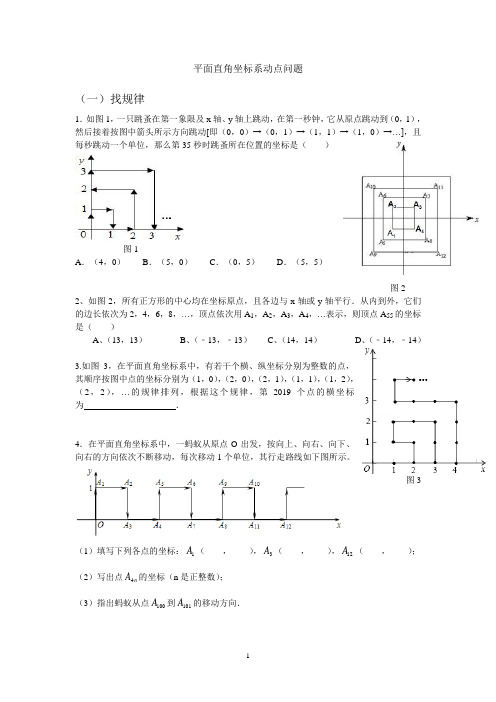
平面直角坐标系动点问题(一)找规律1.如图1,一只跳蚤在第一象限及x 轴、y 轴上跳动,在第一秒钟,它从原点跳动到(0,1),然后接着按图中箭头所示方向跳动[即(0,0)→(0,1)→(1,1)→(1,0)→…],且每秒跳动一个单位,那么第35秒时跳蚤所在位置的坐标是( )图1A .(4,0)B .(5,0)C .(0,5)D .(5,5)图22、如图2,所有正方形的中心均在坐标原点,且各边与x 轴或y 轴平行.从内到外,它们的边长依次为2,4,6,8,…,顶点依次用A 1,A 2,A 3,A 4,…表示,则顶点A 55的坐标是( ) A 、(13,13) B 、(﹣13,﹣13) C 、(14,14) D 、(﹣14,﹣14)3.如图3,在平面直角坐标系中,有若干个横、纵坐标分别为整数的点,其顺序按图中点的坐标分别为(1,0),(2,0),(2,1),(1,1),(1,2),(2,2),…的规律排列,根据这个规律,第2019个点的横坐标为 .4.在平面直角坐标系中,一蚂蚁从原点O 出发,按向上、向右、向下、向右的方向依次不断移动,每次移动1个单位,其行走路线如下图所示。
图3(1)填写下列各点的坐标:1A (____,____),3A (____,____),12A (____,____); (2)写出点n A 4的坐标(n 是正整数); (3)指出蚂蚁从点100A 到101A 的移动方向.5.观察下列有序数对:(3,﹣1)(﹣5,)(7,﹣)(﹣9,)…根据你发现的规律,第100个有序数对是 .6、观察下列有规律的点的坐标:依此规律,A 11的坐标为 ,A 12的坐标为 .7、以0为原点,正东,正北方向为x 轴,y 轴正方向建立平面直角坐标系,一个机器人从原点O 点出发,向正东方向走3米到达A 1点,再向正北方向走6米到达A 2,再向正西方向走9米到达A 3,再向正南方向走12米到达A 4,再向正东方向走15米到达A 5,按此规律走下去,当机器人走到A 6时,A 6的坐标是 .8、如图,将边长为1的正三角形OAP 沿x 轴正方向连续翻转2019次,点P 依次落在点201921,,,P P P 的位置,则点2019P 的横坐标为 .9、如图,在平面直角坐标系上有个点P (1,0),点P 第1次向上跳动1个单位至点P 1(1,1),紧接着第2次向左跳动2个单位至点P 2(﹣1,1),第3次向上跳动1个单位,第4次向右跳动3个单位,第5次又向上跳动1个单位,第6次向左跳动4个单位,…,依此规律跳动下去,点P 第100次跳动至点P 100的坐标是 .点P 第2019次跳动至点P 2019的坐标是 .图4 图5 10、如图5,已知A l (1,0),A 2(1,1),A 3(﹣1,1),A 4(﹣1,﹣1),A 5(2,﹣1),….则点A 2019的坐标为 .1PAOyxP1. 如图,一个粒子在第一象限内及x 、y 轴上运动,在第一分钟内它从原点运动到()1,0,而后它接着按图所示在x 轴、y 轴平行的方向上来回运动,且每分钟移动1个长度单位,那么,在1989分钟后这个粒子所处的位置是( ).A .()35,44B .()36,45C .()37,45D .()44,352. 如果将点P 绕定点M 旋转180︒后与点Q 重合,那么称点P 与点Q 关于点M 对称,定点M 叫做对称中心,此时,点M 是线段PQ 的中点,如图,在直角坐标系中,ABO △的顶点A 、B 、O 的坐标分别为()1,0、()0,1、()0,0,点1P ,2P ,3P ,…中相邻两点都关于ABO △的一个顶点对称,点1P 与点2P 关于点A 对称,点2P 与点3P 关于点B 对称,点3P 与点4P 关于点O 对称,点4P 与点5P 关于点A 对称,点5P 与点6P 关于点B 对称,点6P 与点7P 关于点O 对称,…对称中心分别是A ,B ,O ,A ,B ,O ,…且这些对称中心依次循环,已知1P 的坐标是()1,1.试写出点2P 、7P 、100P 的坐标.3. 如图,在平面直角坐标系中,四边形各顶点的坐标分别为:()0,0A ,()7,0B ,()9,5C ,()2,7D .(1)求此四边形的面积.(2)在坐标轴上,你能否找到一点P ,使50PBC S =△?若能,求出P 点坐标;若不能,请说明理由.4. 如图①,已知OABC 是一个长方形,其中顶点A 、B 的坐标分别为()0,a 和()9,a ,点E在AB 上,且13AE AB =,点F 在OC 上,且13OF OC =.点G 在OA 上,且使GEC △的面积为20,GFB △的面积为16,试求a 的值.图②5. 如图,在平面直角坐标系中,有若干个横坐标分别为整数的点,其顺序按图中“→”方向排列,如()1,0,()2,0,()2,1,()1,1,()1,2,()2,2……根据这个规律,第2019个点的横坐标为_______.6. 在平面直角坐标系xOy 中,我们把横、纵坐标都是整数的点叫做整点.已知点()0,4A ,点B 是x 轴正半轴上的整点,记AOB △内部(不包括边界)的整点个数为m ,当3m =时,点B 的横坐标的所有可能值是_______;当点B 的横坐标为4n (n 为正整数)时,m =________(用含n 的代数式表示).7. 如图,把自然数按图的次序排在直角坐标系中,每个自然数都对应着一个坐标.如1的对应点是原点()0,0,3的对应点是()1,1,16的对应点是()1,2-,那么2019的对应点的坐标是_______.8.如图,长方形BCDE 的各边分别平行于x 轴或y 轴,物体甲和物体乙由点()2,0A 同时出发,沿长方形BCDE 的边作环绕运动,物体甲按逆时针方向以每秒1个单位长度的速度匀速运动,物体乙按顺时针方向以每秒2个单位长度的速度匀速运动,求两个物体开始运动后的第2019次相遇地点的坐标.9. 在平面直角坐标系中,如图①,将线段AB 平移至线段CD ,连接AC 、BD . (1)直接写出图中相等的线段、平行的线段; (2)已知()3,0A -、()2,2B --,点C 在y 轴的正半轴上.点D 在第一象限内,且5ACD S =△,求点C 、D 的坐标;(3)如图②,在平面直角坐标系中,已知一定点,()1,0M ,两个动点(),21E a a +、(),23F b b -+,请你探索是否存在以两个动点E 、F 为端点的线段EF 平行于线段OM 且等于线段OM .若存在,求以点O 、M 、E 、F 为顶点的四边形的面积,若不存在,请说明理由.图②10 . 如图,AOCD 是放置在平面直角坐标系内的梯形,其中O 是坐标原点.点A 、C 、D 的坐标分别为()0,8,()5,0,()3,8,若点P 在梯形内,且PAD POC S S =△△,PAO PCD S S =△△,求P 点的坐标.11. 操作与研究(1)对数轴上的点P 进行如下操作:先把点P 表示的数乘以13,再把所得数对应的点向右平移1个单位,得到点P 的对应点'P B .点A ,B 在数轴上,对线段AB 上的每个点进行上述操作后得到线段''A B ,其中点A ,B 的对应点分别为'A ,'B .如图①,若点A 表示的数是3-,则点'A 表示的数是______;若点'B 表示的数是2,则点表示的数是______;已知线段AB 上的点E 经过上述操作后得到的对应点'E 与点E 重合,则点E 表示的数是_________.(2)如图②,在平面直角坐标系xOy 中,对正方形ABCD 及其内部的每个点进行如下操作:把每个点的横、纵坐标都乘以同一个实数a ,将得到的点先向右平移m 个单位,再向上平移n 个单位()0,0m n >>,得到正方形''''A B C D 及其内部的点,其中点A ,B 的对应点分别为'A ,'B .已知正方形ABCD 内部的一个点F 经过上述操作后得到的对应点'F 与点F 重合,求点F 的坐标.图①A B'-1-2-3-412340图②(二)几何综合问题1、已知点A 的坐标是(3,0)、AB=5,(1)当点B 在X 轴上时、求点B 的坐标、(2)当AB//y 轴时、求点B 的坐标2、如图,已知A 、B 两村庄的坐标分别为(2,2)、(7,4),一辆汽车在x 轴上行驶,从原点O 出发.(1)汽车行驶到什么位置时离A 村最近?写出此点的坐标. (2)汽车行驶到什么位置时离B 村最近?写出此点的坐标. (3)请在图中画出汽车行驶到什么位置时,距离两村的和最短?4.如图,在平面直角坐标系中,点A ,B 的坐标分别为(-1,0),(3,0),现同时将点A ,B 分别向上平移2个单位,再向右平移1个单位,分别得到点A ,B 的对应点C ,D ,连接AC ,BD ,CD .(1)求点C ,D 的坐标及四边形ABDC 的面积ABDC S 四边形D C 3-1BA O x y PDCBAOx y (2)在y 轴上是否存在一点P ,连接PA ,PB ,使PAB S ∆=ABDC S 四边形,若存在这样一点,求出点P 的坐标,若不存在,试说明理由.(3)点P 是线段BD 上的一个动点,连接PC ,PO ,当点P 在BD 上移动时(不与B ,D 重合)给出下列结论:①DCP BOP CPO ∠+∠∠的值不变,②DCP CPOBOP∠+∠∠的值不变,其中有且只有一个是正确的,请你找出这个结论并求其值.5.已知:在平面直角坐标系中,四边形ABCD 是长方形, ∠A =∠B =∠C =∠D =90°,AB ∥CD ,AB =CD =8cm ,AD =BC =6cm ,D 点与原点重合,坐标为(0,0). (1)写出点B 的坐标.(2)动点P 从点A 出发以每秒3个单位长度的速度向终点B 匀速运动, 动点Q 从点C 出发以每秒4个单位长度的速度沿射线CD 方向匀速运动,若P ,Q 两点同时出发,设运动时间为t 秒,当t 为何值时,PQ ∥BC ?(3)在Q 的运动过程中,当Q 运动到什么位置时,使△ADQ 的面积为9? 求出此时Q 点的坐标.6.如图在平面直角坐标系中,A(a,0),B(b,0),(﹣1,2).且|2a+b+1|+=0.(1)求a、b的值;(2)①在y轴的正半轴上存在一点M,使S△COM=S△ABC,求点M的坐标.②在坐标轴的其他位置是否存在点M,使S△COM=S△ABC仍成立?若存在,请直接写出符合条件的点M的坐标.7.如图,在下面的直角坐标系中,已知A(0,a),B(b,0),C(b,4)三点,其中a,b 满足关系式.(1)求a,b的值;(2)如果在第二象限内有一点P(m,),请用含m的式子表示四边形ABOP的面积;(3)在(2)的条件下,是否存在点P,使四边形ABOP的面积与△ABC的面积相等?若存在,求出点P的坐标;若不存在,请说明理由.8.在平面直角坐标系中,点A(a,b)是第四象限内一点,AB⊥y轴于B,且B(0,b)是y轴负半轴上一点,b2=16,S△AOB=12.(1)求点A和点B的坐标;(2)如图1,点D为线段OA(端点除外)上某一点,过点D作AO垂线交x轴于E,交直线AB于F,∠EOD、∠AFD的平分线相交于N,求∠ONF的度数.(3)如图2,点D为线段OA(端点除外)上某一点,当点D在线段上运动时,过点D作直线EF交x轴正半轴于E,交直线AB于F,∠EOD,∠AFD的平分线相交于点N.若记∠ODF=α,请用α的式子表示∠ONF的大小,并说明理由.。
人教版七年级下册数学动点问题

人教版七年级下册数学动点问题1.题目描述:给定平面直角坐标系上两个点A、B的坐标,以及一辆汽车从原点出发沿x轴行驶,求汽车到达离A点最近、离B点最近和距离两点和最短的位置坐标。
解题思路:根据勾股定理,可以求出汽车到达任意位置与A、B两点的距离,进而判断哪个位置离A、B最近,哪个位置距离两点和最短。
最终画出图像,标出所求位置的坐标。
2.题目描述:给定平面直角坐标系上三个点A、C和O,满足一定条件,求动点P、Q在规定时间内的运动,以及点F、G、E在特定条件下的运动情况。
解题思路:根据题目所给条件,可以求出点A、C、O的坐标,以及三角形ODP、ODQ的面积。
然后根据P、Q的速度和时间,求出它们的运动轨迹。
对于点F、G、E,根据题目所给条件,可以求出它们的坐标,进而分析它们的运动情况。
3.题目描述:给定平面直角坐标系上一个长方形ABCD的两个顶点坐标,以及一个点P的坐标,求长方形的面积和点P 在一定条件下的伴随点坐标。
解题思路:根据题目所给条件,可以求出长方形ABCD 的面积。
对于点P的伴随点,可以根据题目所给公式求出其坐标,然后根据题目所要求的点的伴随点,反复使用公式求出所求点的坐标。
2.若点A1的坐标为(a,b),对于任意的正整数n,点An均在x轴上方,则a,b应满足的条件为:对于任意的正整数n,An在x轴上方,即An的纵坐标大于0.因此,对于任意的正整数n,有bn>0.而An是由A1向上移动n个单位得到的,因此有An的纵坐标为b+n。
所以对于任意的正整数n,有b+n>0,即b>-n。
综上所述,a和b的取值范围为a∈R,b>-n。
4.如图,在平面直角坐标中,A(0,1),B(2,0),C(2,1.5).1)求△XXX的面积:设AB向量为a,AC向量为b,则△ABC的面积为|a×b|/2,其中×表示向量的叉积。
因为AB向量为(-2,1),AC向量为(2,0.5),所以|a×b|=|-4-1|=5,因此△ABC的面积为5/2.2)如果在第二象限有一点P(a,0.5),试用a的式子表示四边形ABOP的面积:四边形ABOP的面积等于△ABP的面积加上△AOP的面积。
平面直角坐标系。动点问题。好
平面直角坐标系。
动点问题。
好平面直角坐标系动点问题已知平面直角坐标系中,点A(4,0),点B(0,3),点P从点A出发,以每秒1个单位的速度在x轴上向右平移,点Q从B 点出发,以每秒2个单位的速度沿直线y=3向右平移,又P、Q两点同时出发,设运动时间为t秒。
1) 求当t为多少时,四边形OBPQ的面积为8.首先,可以求出四边形OBPQ的坐标:O(0,0),B(0,3),P(4+t,0),Q(2t,3)。
由于四边形OBPQ是平行四边形,所以它的面积可以用它的对角线之积来表示:S(OBPQ) = |OB| × |PQ|× sinθ。
其中,|OB| = 3,|PQ| = √[(4+t-2t)²+3²] = √(t²+16),θ是OB与PQ之间的夹角。
由于OB与PQ平行,所以θ = 0,sinθ = 0,因此S(OBPQ) = 0.所以,四边形OBPQ的面积始终为0,无法等于8,因此无解。
2) 连接AQ,当△APQ是直角三角形时,求Q的坐标。
由于△APQ是直角三角形,所以根据勾股定理,有AP²+PQ² = AQ²。
又因为AP = 4+t,PQ = 3-2t,所以可以列出方程:(4+t)² + (3-2t)² = AQ²。
化简后得到:AQ² = 25-8t+5t²。
又因为Q在直线y=3上,所以可以列出另一个方程:yQ = 3.将Q的坐标表示为(xQ。
yQ),则有xQ² + yQ² = AQ²,代入上面的方程,得到xQ² + 9 = 25-8t+5t²,化简后得到:xQ² = 16-8t+5t²。
因为Q在第二象限,所以xQ<0,因此xQ = -√(16-8t+5t²),yQ = 3.所以Q的坐标为(-√(16-8t+5t²)。
平面直角坐标系动点问题
平面直角坐标系动点问题一、引言平面直角坐标系是数学中非常基础的概念,它可以用来描述二维空间中的点和图形。
在平面直角坐标系中,我们可以通过坐标轴上的数值来确定一个点的位置。
而动点问题则是将平面直角坐标系与运动学相结合,用于描述物体在平面内运动过程中的位置变化。
二、基本概念1. 平面直角坐标系平面直角坐标系由两条互相垂直的数轴组成,分别称为x轴和y轴。
它们交于原点O,并且每个点都可以用一个有序数对(x, y)来表示。
2. 动点动点是指在平面内移动的一个点,它可以沿着任意路径运动,并且在不同时间处于不同位置。
3. 运动学运动学是研究物体在空间中运动状态和规律的学科。
它包括了物体位置、速度、加速度等概念。
三、平面直角坐标系与动点问题1. 平移运动平移运动是指物体沿着一条直线或曲线路径做匀速运动,在这种情况下,我们可以通过简单地改变物体在x轴和y轴上的坐标来描述它的位置变化。
例如,一个物体从点A沿着直线运动到点B,我们可以通过改变x轴和y轴上的坐标来描述这个过程。
设A的坐标为(x1, y1),B的坐标为(x2, y2),则在t时刻物体的位置可以表示为:x = x1 + (x2 - x1) * ty = y1 + (y2 - y1) * t其中t表示时间,它的取值范围通常是0到1。
2. 旋转运动旋转运动是指物体绕固定点或者绕自身中心做圆周运动,在这种情况下,我们需要使用极坐标系来描述物体的位置。
极坐标系由极轴和极角两个参数组成,其中极轴表示物体到原点O的距离,而极角表示物体与x轴之间的夹角。
在旋转运动中,我们通常会使用弧度制来表示角度。
例如,一个物体以原点O为中心顺时针旋转α角度后到达点P,则P 的极坐标可以表示为:r = OP = √(x^2 + y^2)θ = α其中r表示距离原点O的距离,而θ表示与x轴之间的夹角。
3. 抛射运动抛射运动是指物体在空中做抛体运动,它的轨迹通常是一个抛物线。
在这种情况下,我们需要使用二元二次方程来描述物体的位置。
平面直角坐标系动点问题的解题技巧

平面直角坐标系动点问题的解题技巧在学习数学的过程中,平面直角坐标系动点问题是不可避免的一部分。
解决这类问题需要掌握一些基本的技巧和方法。
本文将从几个方面介绍平面直角坐标系动点问题的解题技巧。
1. 确定直角坐标系和参照系在解决平面直角坐标系动点问题之前,首先需要确定直角坐标系和参照系。
直角坐标系是用来描述物体运动的空间坐标系,而参照系则是用来描述物体运动的时间坐标系。
在确定坐标系和参照系后,我们就可以把物体的位置、速度和加速度等物理量表示为坐标和时间的函数。
2. 建立物理模型建立物理模型是解决平面直角坐标系动点问题的关键。
在建立物理模型时,需要考虑物体的运动状态、受力情况和物体的基本性质。
我们可以通过建立动力学模型和几何模型来描述物体的运动状态,并利用这些模型来计算物体的位置、速度和加速度等物理量。
3. 使用向量加减法在解决平面直角坐标系动点问题时,向量加减法是非常重要的。
通过使用向量加减法,我们可以将物体的运动状态表示为一个向量,从而方便计算物体的位置、速度和加速度等物理量。
此外,在使用向量加减法时,我们还需要注意向量的大小和方向,以便准确表示物体的运动状态。
4. 利用微积分知识微积分是解决平面直角坐标系动点问题的重要工具。
通过利用微积分知识,我们可以求解物体的速度和加速度,进而计算出物体的位置。
在利用微积分求解问题时,我们需要注意函数的导数和积分等基本概念,以便正确求解问题。
5. 应用三角函数知识三角函数知识也是解决平面直角坐标系动点问题的必备知识之一。
在解决平面直角坐标系动点问题时,我们经常需要涉及到角度和三角函数的计算。
因此,掌握三角函数知识是非常必要的。
总之,解决平面直角坐标系动点问题需要掌握一些基本的技巧和方法。
通过正确使用直角坐标系和参照系、建立物理模型、使用向量加减法、利用微积分知识以及应用三角函数知识等方法,我们可以有效地解决平面直角坐标系动点问题,提高数学解题能力。
平面直角坐标系动点问题的解题技巧
平面直角坐标系动点问题的解题技巧
平面直角坐标系是数学中的一个基础概念,它是一个由横纵坐标轴组成的平面。
在这个平面上,我们可以通过设定不同的点的横纵坐标来表示不同的位置。
而动点问题则涉及到在这个平面上的运动问题。
为了解决平面直角坐标系动点问题,我们需要掌握一些解题技巧。
以下是一些常用的技巧:
1. 确定坐标系
在解决问题之前,我们需要确定一个合适的坐标系。
通常来说,我们可以选择让动点的起点或终点落在坐标轴上,这样问题会变得更加简单明了。
2. 确定动点的方程
一旦我们确定了坐标系,就可以根据问题中给出的条件确定动点的方程。
通常情况下,动点的方程是一个含有变量的二元一次方程。
3. 利用图像解决问题
在确定了动点的方程之后,我们可以画出动点在坐标系上的图像。
这样我们就能更加直观地理解问题,并且可以对动点的轨迹进行分析。
4. 分析动点的特征
在解决问题的过程中,我们需要分析动点的特征,例如它是匀速运动还是加速运动,它的轨迹是否是直线或曲线等等。
这些特征可以帮助我们更好地理解问题,并且指导我们选择合适的解决方法。
总之,在解决平面直角坐标系动点问题时,我们需要灵活运用数学知识和解题技巧,结合问题的具体情况,找出最优解决方法。
平面直角坐标系中的动点问题初一

平面直角坐标系中的动点问题初一摘要:I.引言- 平面直角坐标系简介- 动点问题的概念II.动点问题的解决方法- 利用速度和时间的关系- 利用坐标和角度的关系III.动点问题的应用- 求解实际问题中的动点问题- 动点问题在生活中的应用举例IV.总结- 动点问题的意义和重要性- 对动点问题的未来研究方向正文:I.引言平面直角坐标系是数学中一个重要的概念,它有助于我们更好地理解几何图形和空间中的位置关系。
在平面直角坐标系中,动点问题是一个常见的问题类型,它涉及到如何根据给定的条件,求解一个动点在坐标系中的位置。
初一阶段,我们学习了如何解决这类问题,这对我们今后的数学学习有着重要的意义。
II.动点问题的解决方法动点问题的解决方法主要有两种:一种是利用速度和时间的关系,另一种是利用坐标和角度的关系。
首先,我们可以通过已知的速度和时间,计算出动点在坐标系中的位置。
其次,我们也可以通过已知的坐标和角度,计算出动点的位置。
这两种方法在实际问题中都有广泛的应用。
III.动点问题的应用动点问题在实际生活中有着广泛的应用。
例如,在物理中,我们可以通过动点问题来求解物体的运动轨迹;在地理中,我们可以通过动点问题来计算地球表面上两点之间的最短距离;在计算机图形学中,我们可以通过动点问题来模拟物体的运动过程。
这些应用都体现了动点问题的重要性。
IV.总结动点问题是平面直角坐标系中一个常见的问题类型,它涉及到如何根据给定的条件,求解一个动点在坐标系中的位置。
通过学习动点问题的解决方法,我们可以更好地理解平面直角坐标系的概念,也可以提高我们的问题解决能力。
平面直角坐标系面积动点问题
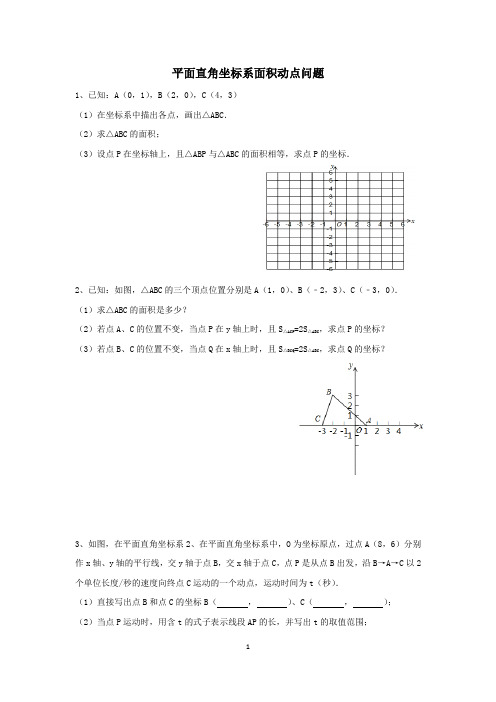
平面直角坐标系面积动点问题1、已知:A(0,1),B(2,0),C(4,3)(1)在坐标系中描出各点,画出△ABC.(2)求△ABC的面积;(3)设点P在坐标轴上,且△ABP与△ABC的面积相等,求点P的坐标.2、已知:如图,△ABC的三个顶点位置分别是A(1,0)、B(﹣2,3)、C(﹣3,0).(1)求△ABC的面积是多少?(2)若点A、C的位置不变,当点P在y轴上时,且S△ACP=2S△ABC,求点P的坐标?(3)若点B、C的位置不变,当点Q在x轴上时,且S△BCQ=2S△ABC,求点Q的坐标?3、如图,在平面直角坐标系2、在平面直角坐标系中,O为坐标原点,过点A(8,6)分别作x轴、y轴的平行线,交y轴于点B,交x轴于点C,点P是从点B出发,沿B→A→C以2个单位长度/秒的速度向终点C运动的一个动点,运动时间为t(秒).(1)直接写出点B和点C的坐标B(,)、C(,);(2)当点P运动时,用含t的式子表示线段AP的长,并写出t的取值范围;(3)点D(2,0),连接PD、AD,在(2)条件下是否存在这样的t值,使S△APD =S ABOC,若存在,请求出t值,若不存在,请说明理由.4、如图,在平面直角坐标系中,已知A(0,a),B(b,0),C(b,c)三点,其中a、b、c 满足关系式|a﹣2|+(b﹣3)2=0,(c﹣4)2≤0(1)求a、b、c的值;(2)如果在第二象限内有一点P(m ,),请用含m的式子表示四边形ABOP的面积;(3)在(2)的条件下,是否存在点P,使四边形ABOP的面积与△ABC的面积相等?若存在,求出点P的坐标,若不存在,请说明理由.5、如图,在平面直角坐标中,A(0,1),B(2,0),C(2,1.5).(1)求△ABC的面积;(2)如果在第二象限内有一点P(a,0.5),试用a的式子表示四边形ABOP的面积;(3)在(2)的条件下,是否存在这样的点P,使四边形ABOP的面积与△ABC的面积相等?若存在,求出点P的坐标,若不存在,请说明理由.yxPOCBA6、在直角坐标系中,△ABC的顶点A(—2,0),B(1)求△ABC的面积(2)点D为y负半轴上一动点,连BD交x轴于E,∆∆ADE BCE在,请求出点D的坐标;若不存在,请说明理由.(3)点F(5,n)是第一象限内一点,,连BF,CF,G是x轴上一点,若△ABG的面积等于四边形ABDC的面积,则点G的坐标为(用含。
直角坐标系动点问题的诀窍

直角坐标系动点问题的诀窍在数学中,直角坐标系动点问题是经常出现的考题之一。
这类问题通常涉及到点在坐标系中的运动情况,需要根据给定的条件求解点的位置、速度等问题。
下面将探讨解决直角坐标系动点问题的一些技巧和方法。
1. 坐标系的建立首先,在解决动点问题时,需要建立一个合适的直角坐标系。
通常情况下,可以选择点的起始位置作为坐标系的原点,选择合适的方向作为坐标轴的正方向。
建立坐标系可以帮助我们清晰地描述点的位置,方便后续的计算。
2. 参数化方程在处理动点问题时,常常需要引入参数来描述点的运动情况。
可以选择时间作为参数,通过时间的变化描述点坐标的变化。
这样可以将点的位置用参数的函数表示,进而求解更为便利。
3. 计算速度和加速度动点问题通常需要求解点的速度和加速度,这可以通过对点的位置关于时间的导数来实现。
点的速度是位置矢量对时间的导数,而点的加速度是速度对时间的导数。
通过这些导数,可以分析点的运动特性。
4. 利用几何关系在解决动点问题时,常常可以利用几何关系简化计算。
例如,可以通过距离公式求两点之间的距离,或者利用角度关系求解问题。
合理运用几何知识可以提高问题求解的效率。
5. 建立方程组对于复杂的动点问题,可以建立方程组来求解。
通过分析问题的条件,建立方程组可以将问题转化为数学问题进行求解。
在建立方程组时,需要确保方程的数目与未知数的数目相等,以确保方程组有解。
结语通过以上技巧和方法,可以更加高效地解决直角坐标系动点问题。
在处理这类问题时,建议结合数学知识和逻辑推理,灵活运用各种方法,以便更好地理解问题并求解。
希望以上内容对您在解决直角坐标系动点问题时有所帮助。
完整版)初一平面直角坐标系动点问题(经典难题)
完整版)初一平面直角坐标系动点问题(经典难题)一)找规律1.如图1,一只跳蚤在第一象限及x轴、y轴上跳动。
在第一秒钟,它从原点跳动到(0,1),然后按照箭头所示方向跳动(即(0,0)→(0,1)→(1,1)→(1,0)→…),每秒跳动一个单位。
那么第35秒时跳蚤所在位置的坐标是(4,1),因此答案为A。
2.如图2,所有正方形的中心都在坐标原点,且各边与x轴或y轴平行。
从内到外,它们的边长依次为2,4,6,8,…,顶点依次用A1,A2,A3,A4,…表示。
顶点A55的坐标是(54,54),因此答案为A。
3.如图3,在平面直角坐标系中,有若干个横、纵坐标分别为整数的点,其顺序按图中点的坐标分别为(1,0),(2,0),(2,1),(1,1),(1,2),(2,2),…的规律排列。
根据这个规律,第2015个点的横坐标为1,因此答案为A。
4.在平面直角坐标系中,一只蚂蚁从原点O出发,按照向上、向右、向下、向右的方向依次不断移动,每次移动1个单位,其行走路线如图3所示。
1)填写下列各点的坐标:A1(0,1),A3(2,1),A12(6,﹣2);2)点A4n的坐标为(2n,﹣2n+1);3)蚂蚁从点A100到A101的移动方向为向上。
5.观察下列有序数对:(3,﹣1),(﹣5,0),(7,﹣1),(﹣9,0),…根据你发现的规律,第100个有序数对是(195,﹣1)。
6.观察下列有规律的点的坐标:A1(1,0),A2(2,1),A3(4,0),A4(8,1),…依照规律,A11的坐标为(1024,1),A12的坐标为(2048,0)。
7.以原点为起点,正东,正北方向为x轴,y轴正方向建立平面直角坐标系。
一个机器人从原点O点出发,向正东方向走3米到达A1点,再向正北方向走6米到达A2,再向正西方向走9米到达A3,再向XXX方向走12米到达A4,再向正东方向走15米到达A5,按此规律走下去,当机器人走到A6时,A6的坐标是(﹣3,﹣3)。
平面直角坐标系相关动点问题(教师用教案有答案)

平面直角坐标系相关动点问题1、如图,动点P在平面直角坐标系中按图中箭头所示方向运动,第1次从原点运动到点(1,1),第2次接着运动到点(2,0),第3次接着运动到点(3,2),…,按这样的运动规律,经过第2020次运动后,动点P的坐标是()A.(2020,1)B.(2020,0)C.(2020,2)D.(2019,0)解:点P坐标运动规律可以看做每运动四次一个循环,每个循环向右移动4个单位,则2020=505×4,所以,前505次循环运动点P共向右运动505×4=2020个单位,且在x轴上,故点P坐标为(2020,0).故选:B.2、如图,在平面直角坐标系中,一动点从原点O出发,按向上,向右,向下,向右的方向不断地移动,每移动一个单位,得到点A1(0,1),A2(1,1),A3(1,0),A4(2,0),那么A2020坐标为()A.(2020,1) B.(2020,0)C.(1010,1) D.(1010,0)3、如图,在平面直角坐标系中,A(1,1),B(-1,1),C(-1,-2),D(1,-2),把一条长为2019个单位长度且没有弹性的细线(线的粗细不略不计)的一端固定在点A处,并按A-B-C-D-A-的规律绕在四边形ABCD的边上,则细线另一端所在位置的点的坐标是()A.(1,0)B.(1,1)C.(-1,1)D.(-1,-2)4、如图,在平面直角坐标系中,有若干个整数点,其顺序按图中“→”方向排列,如(1,0),(2,0),(2,1),(3,2),(3,1),(3,0)…,如果(1,0)是第一个点,探究规律如下:(1)坐标为(3,0)的是第个点,坐标为(5,0)的是第个点;( 2 )坐标为(7,0)的是第个点;(3)第74个点的坐标为.解:(1)由图可知,坐标为(3,0)的点是第1+2+3=6个点,坐标是(5,0)的点是第1+2+3+4+5=15个点,故答案为:6,15;(2)坐标为(7,0)的点是第1+2+3+4+5+6+7=28个点,故答案为:28;(3)∵(11,0)是第1+2+3+…+11=66个点,(12,11)是第1+2+3+…+12=78个点,∴第74个点是(12,7),故答案为:(12,7).5、如图,平面直角坐标系中,过点A(0,2)的直线a垂直于y轴,M(9,2)为直线a上一点.若点P从点M出发,以2cm/s的速度沿直线a向左移动;点Q从原点同时出发,以1cm/s的速度沿x轴向右移动,多久后线段PQ平行于y轴?解:设当PQ∥y轴时,点P的运动时间为xs,依题意有9-2x=x,解得x=3.故3秒后线段PQ平行于y轴.6、在平面直角坐标系中(以1cm为单位长度),过A(0,4)的直线a垂直于y轴,点M(9,4)为直线a上一点,若点P从点M出发,以每秒2cm的速度沿直线a向左移动;点Q从原点同时出发,以每秒1cm的速度沿x轴向右移动,(1)几秒后PQ平行于y轴?(2)若四边形AOQP的面积为10cm2,求点P的坐标.解:(1)设x秒后PQ平行于y轴.∵AP∥OQ,∴当AP=OQ时,四边形AOQP是平行四边形,∴PQ平行于y轴.由AP=OQ,得9-2x=x,解得x=3.故3秒后PQ平行于y轴;(2)设y秒后四边形AOQP的面积为10cm2,则1(y+9-2y)×4=10,解得y=4,2所以AP=9-2y=9-2×4=1,故点P的坐标为(1,4).7、如图,在平面直角坐标系中,AB∥CD∥x轴,BC∥DE∥y轴,且AB=CD=4cm,OA=5cm,DE=2cm,动点P从点A出发,以每秒1cm的速度,沿A-B-C路线向点C运动;动点Q从点O出发,以每秒2cm的速度,沿O-E-D路线向点D运动.若P、Q两点同时出发,其中一点到达终点时,另一点也停止运动.(1)直接写出B、C、D三点的坐标;(2)当点P、Q两点出发5秒时,求△OPQ的面积.8、如图1,在平面直角坐标系中,OA=7,OC=18,将点C先向上平移7个单位,再向左平移4个单位,得到点B.(1)写出点B的坐标;(2)如图2,若点P从点C出发,以2个单位长度/秒的速度沿CO方向移动,同时点Q从点O出发以1个单位长度/秒的速度沿OA方向移动,设移动的时间为t秒(0<t<7).①试求出四边形BQOP的面积;②若记△ABQ的面积为S1,△PBC的面积记为S2,当S1<S2时,求t的取值范围.解:(1)将点C先向上平移7个单位,即点C落在AB的延长线上,纵坐标为7,横坐标为18,再向左平移4个单位,横坐标变为18-4=14,故其坐标为(14,7);9、如图,已知A(1,0),点B在y轴上,将△OAB沿x轴负方向平移,平移后的图形为△DEC,且点C的坐标为(-2,3)(1)直接写出点E的坐标;(2)点P是线段CE上一动点,写出∠CBP,∠PAD,∠APB之间的数量关系,并证明你的结论。
平面直角坐标系 动点问题 好
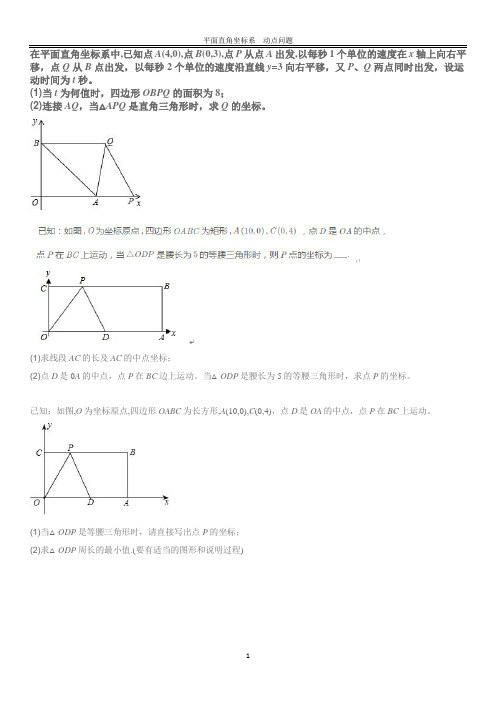
在平面直角坐标系中,已知点A(4,0),点B(0,3),点P从点A出发,以每秒1个单位的速度在x轴上向右平移,点Q从B点出发,以每秒2个单位的速度沿直线y=3向右平移,又P、Q两点同时出发,设运动时间为t秒。
(1)当t为何值时,四边形OBPQ的面积为8;(2)连接AQ,当△APQ是直角三角形时,求Q的坐标。
(1)求线段AC的长及AC的中点坐标;(2)点D是0A的中点,点P在BC边上运动。
当△ODP是腰长为5的等腰三角形时,求点P的坐标。
已知:如图,O为坐标原点,四边形OABC为长方形,A(10,0),C(0,4),点D是OA的中点,点P在BC上运动。
(1)当△ODP是等腰三角形时,请直接写出点P的坐标;(2)求△ODP周长的最小值.(要有适当的图形和说明过程)如图,在长方形OABC中,O为平面直角坐标系的原点,点A坐标为(a,0),点C的坐标为(0,b),且a、b 满足√a−4+|b−6|=0,点B在第一象限内,点P从原点出发,以每秒2个单位长度的速度沿着O−C−B−A−O的线路移动。
(1)a=___,b=___,点B的坐标为___;(2)当点P移动4秒时,请指出点P的位置,并求出点P的坐标;(3)在移动过程中,当点P到x轴的距离为5个单位长度时,求点P移动的时间。
如图所示,A(1,0)、点B在y轴上,将三角形OAB沿x轴负方向平移,平移后的图形为三角形DEC,且点C的坐标为(−3,2).(1)直接写出点E的坐标___;(2)在四边形ABCD中,点P从点B出发,沿“BC→CD”移动。
若点P的速度为每秒1个单位长度,运动时间为t秒,回答下列问题:①当t=___秒时,点P的横坐标与纵坐标互为相反数;②求点P在运动过程中的坐标,(用含t的式子表示,写出过程);③当3秒<t<5秒时,设∠CBP=x∘,∠PAD=y∘,∠BPA=z∘,试问x,y,z之间的数量关系能否确定?若能,请用含x,y的式子表示z,写出过程;若不能,说明理由。
平面直角坐标系中的动点问题初一
平面直角坐标系中的动点问题初一
在平面直角坐标系中,动点问题涉及到描述物体运动轨迹和位置变化的问题。
一般情况下,我们使用x轴和y轴来表示平面直角坐标系。
在动点问题中,通常我们需要给出动点的起始位置和速度等运动参数,然后根据问题要求来分析动点的运动轨迹。
举例来说,如果一个物体的起始位置在坐标原点(0,0),它以每秒1单位的速度沿着x轴正方向运动,那么可以通过速度×时间的公式来计算物体在t秒后的位置,即(x,y) = (1t, 0)。
还有一些常见的动点问题,比如:
1. 若动点A在t时刻的位置为(x,y),那么在t+1时刻的位置是多少?
2. 若动点A在t=0时刻的位置为(0, 0),它以每秒2单位的速度沿着x轴正方向运动,那么在t秒后的位置是多少?
3. 若动点A在t=0时刻的位置为(0, 2),它以每秒3单位的速度沿着y轴负方向运动,那么在t秒后的位置是多少?
这些问题的解答需要根据给定的运动参数和问题要求来确定物体的位置变化。
在解答过程中,我们可以运用坐标系中的几何概念和运动学知识来分析和计算。
希望以上内容对你有所帮助!。
平面直角坐标系动点问题
平面直角坐标系动点问题Document number:NOCG-YUNOO-BUYTT-UU986-1986UT点的存在性问题(运动性)1、如图,在平面直角坐标系中,已知点A (-5,0),B (),D (2,7), (1)求C 点的坐标;(2)动点P 从B 点出发以每秒1个单位的速度沿BA 方向运动,同时动点Q 从C 点出发也以每秒1个单位的速度沿y 轴正半轴方向运动(当P 点运动到A 点时,两点都停止运动)。
设从出发起运动了x 秒。
①请用含x 的代数式分别表示P,Q 两点的坐标;②当x=2时,y 轴上是否存在一点E ,使得△AQE 的面积与△APQ 的面积相等若存在,求E 的坐标,若不存在,说明理由2、(1)在平面直角坐标系中,如图1,将线段AB 平移至线段CD ,连接AC 、BD 。
xx①直接写出图中相等的线段、平行的线段;②已知A(-3,0)、B(-2,-2),点C在y轴的正半轴上,点D在第一象限内,且=5,求点C、D的坐标;(2)在平面直角坐标系中,如图,已知一定点M(1,0),两个动点E(a,2a+1)、F(b,-2b+3),请你探索是否存在以两个动点E、F为端点的线段EF平行于线段OM且等于线段OM。
若存在,求以点O、M、E、F为顶点的四边形的面积,若不存在,请说明理由。
3、如图,A、B两点同时从原点O出发,点A以每秒m个单位长度沿x轴的负方向运动,点B以每秒n个单位长度沿y轴的正方向运动。
(1)若|x+2y-5|+|2x-y|=0,试分别求出1秒钟后A、B两点的坐标。
(2)如图,设∠BAO的邻补角和∠ABO的邻补角平分线相交于点P,问:点A、B在运动的过程中,∠P的大小是否会发生变化若不发生变化,请求出其值;若发生变化,请说明理由。
(3)如图,延长BA至E,在∠ABO的内部作射线BF交x轴于点C,若∠EAC、∠FCA、∠ABC的平分线相交于点G,过点G作BE的垂线,垂足为H,试问∠AGH和∠BGC的大小关系如何请写出你的结论并说明理由。
直角坐标系中的动点问题
直角坐标系中的动点问题
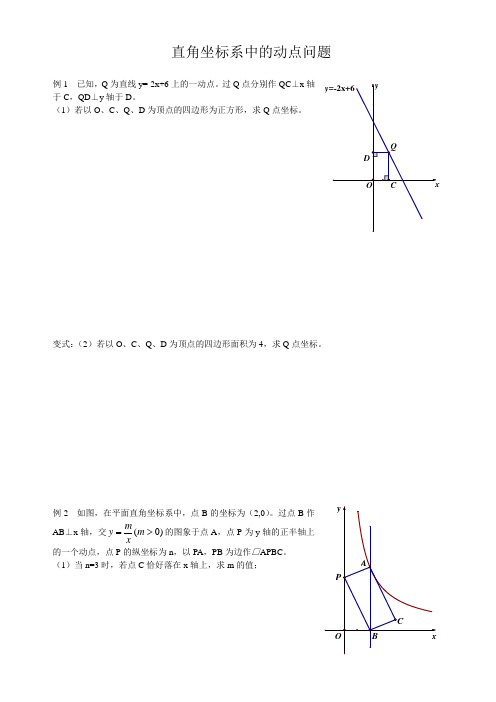
例1 已知,Q 为直线y=-2x+6上的一动点。
过Q 点分别作QC ⊥x 轴于C ,QD ⊥y 轴于D 。
(1)若以O 、C 、Q 、D 为顶点的四边形为正方形,求Q 点坐标。
变式:(2)若以O 、C 、Q 、D 为顶点的四边形面积为4,求Q 点坐标。
例2 如图,在平面直角坐标系中,点B 的坐标为(2,0)。
过点B 作
AB ⊥x 轴,交)0(>=m x
m y 的图象于点A ,点P 为y 轴的正半轴上的一个动点,点P 的纵坐标为n ,以PA ,PB 为边作□APBC 。
(1)当n=3时,若点C 恰好落在x 轴上,求m 的值;
y
例2 如图,在平面直角坐标系中,点B 的坐标为(2,0)。
过点B 作AB
⊥x 轴,交)0(>=m x
m y 的图象于点A ,点P 为y 轴的正半轴上的一个动点,点P 的纵坐标为n ,以PA ,PB 为边作□APBC 。
(2)求点C 的坐标(用含m,n 的代数式表示)。
(3)当点A 、P 运动时,是否存在有一个内角为60°的菱形APBC ?若存在,求出所有满足条件的m 的值,并判断此时点C 是否在x
m y =的图象上;若不存在,请说明理由。
(4)点A 、P 在整个运动过程中,是否存在一个m 的值,使□APBC 是矩形且位置唯一?若存在,请直接写出m,n 的值;若不存在,请说明理由。
(完整)初一年级平面直角坐标系动点问题(经典难题).docx

完美 WORD 格式 .整理平面直角坐标系动点问题(一)找规律1.如 1,一只跳蚤在第一象限及 x 、y 上跳,在第一秒,它从原点跳到( 0,1),然后接着按中箭所示方向跳 [ 即( 0,0)→( 0,1)→( 1,1)→( 1,0)→⋯ ] ,且每秒跳一个位,那么第35 秒跳蚤所在位置的坐是()1A.( 4, 0)B.(5,0)C.(0,5)D.(5,5)22、如2,所有正方形的中心均在坐原点,且各与x 或 y 平行.从内到外,它的依次2, 4,6, 8,⋯,点依次用A1,A2, A3, A4,⋯表示,点A55的坐是()A、( 13, 13)B、( 13, 13)C、( 14, 14)D、( 14, 14)3.如 3,在平面直角坐系中,有若干个横、坐分整数的点,其序按中点的坐分( 1,0),( 2,0),( 2,1),(1,1),( 1,2),( 2 , 2 ),⋯的律排列,根据个律,第2015 个点的横坐.4.在平面直角坐系中,一从原点O 出,按向上、向右、向下、向右的方向依次不断移,每次移 1 个位,其行走路如下所示。
3(1)填写下列各点的坐:A1(____,____), A3(____,____), A12(____,____);(2)写出点A4n的坐(n是正整数);(3)指出从点A100到 A101的移方向.5.察下列有序数:( 3, 1)( 5,)( 7,)( 9,)⋯根据你的律,第100 个有序数是.6、察下列有律的点的坐:依此律, A11的坐,A12的坐.7、以 0 原点,正,正北方向x , y 正方向建立平面直角坐系,一个机器人从原点 O点出,向正方向走 3 米到达 A1点,再向正北方向走 6 米到达 A2,再向正西方向走 9 米到达 A3,再向正南方向走12 米到达 A4,再向正方向走15 米到达 A5,按此律走下去,当机器人走到A6, A6的坐是.8、如,将 1 的正三角形OAP 沿x正方向翻2008 次,点P依次落在点P, P , P,, P的位置,点P的横坐.12320082008yPA O P1x9、如,在平面直角坐系上有个点P(1,0),点 P 第 1 次向上跳 1 个位至点P1( 1,1),接着第 2 次向左跳 2 个位至点P2( 1,1),第 3 次向上跳 1 个位,第 4 次向右跳 3 个位,第 5 次又向上跳1个位,第 6 次向左跳 4 个位,⋯,依此律跳下去,点 P 第 100 次跳至点P100的坐是.点P第2009次跳至点P2009的坐是.4510、如 5,已知 A l( 1,0),A2( 1,1),A3( 1,1),A4( 1, 1),A5( 2, 1),⋯.点 A2007的坐.(二)几何综合问题1、已知点 A 的坐是( 3, 0)、 AB=5,( 1)当点 B 在 X 上、求点 B 的坐、( 2)当AB//y 、求点B的坐2、如,已知A、B 两村庄的坐分(2, 2)、( 7, 4),一汽在x 上行,从原点O出.(1)汽行到什么位置离A 村最近?写出此点的坐.(2)汽行到什么位置离B 村最近?写出此点的坐.(3)在中画出汽行到什么位置,距离两村的和最短?86B4A2-5510-24.如图,在平面直角坐标系中,点 A, B 的坐标分别为(- 1, 0),( 3,0),现同时将点 A, B分别向上平移 2 个单位,再向右平移 1 个单位,分别得到点 A,B 的对应点 C,D,连接 AC,BD,CD.(1) 求点 C, D 的坐标及四边形ABDC的面积S四边形ABDC yC DA O B-13x(2) 在y 轴上是否存在一点P,连接PA, PB,使S PAB=S四边形 ABDC,若存在这样一点,求出点 P 的坐标,若不存在,试说明理由.yC DA O B-13x(3) 点 P 是线段 BD上的一个动点,连接PC, PO,当点 P 在 BD上移动时(不与B, D 重合)DCP BOP DCPCPO给出下列结论:①的值不变,②的值不变,其中有且只CPO BOP有一个是正确的,请你找出这个结论并求其值.yC D5.已知 : 在平面直角坐标系中 , 四边形ABCD是长方形 , ∠A=∠B=∠C=∠D=90°,AB∥ CD, AB=CD=8cm,AD=BC=6cm, D点与原点重合,坐标为(0,0).( 1)写出点 B 的坐标.( 2)动点P从点A出发以每秒 3 个单位长度的速度向终点B匀速运动,动点 Q从点 C出发以每秒 4 个单位长度的速度沿射线CD方向匀速运动,若 P, Q两点同时出发,设运动时间为t秒 , 当t为何值时 , PQ∥BC?(3)在Q的运动过程中 , 当Q运动到什么位置时 , 使△ADQ的面积为 9? 求出此时Q点的坐标.6.如图在平面直角坐标系中,A( a,0),B( b,0),(﹣1, 2).且 |2a+b+1|+=0.(1)求 a、 b 的值;(2)①在 y 轴的正半轴上存在一点 M,使 S△COM= S△ABC,求点 M的坐标.②在坐标轴的其他位置是否存在点 M,使 S△COM= S△ABC仍成立?若存在,请直接写出符合条件的点 M的坐标.7.如图,在下面的直角坐标系中,已知A( 0, a), B( b,0), C( b, 4)三点,其中 a, b满足关系式.(1)求 a, b 的值;(2)如果在第二象限内有一点P( m,),请用含 m的式子表示四边形 ABOP的面积;(3)在( 2)的条件下,是否存在点P,使四边形 ABOP的面积与△ ABC 的面积相等?若存在,求出点 P 的坐标;若不存在,请说明理由.8.在平面直角坐标系中,点A( a, b)是第四象限内一点, AB⊥y轴于 B,且 B( 0, b)是2y 轴负半轴上一点, b =16, S△AOB=12.(1)求点 A 和点 B 的坐标;(2)如图 1,点 D 为线段 OA(端点除外)上某一点,过点 D 作 AO垂线交 x 轴于 E,交直线AB于 F,∠ EOD、∠ AFD 的平分线相交于N,求∠ ONF的度数.(3)如图 2,点 D为线段 OA(端点除外)上某一点,当点 D 在线段上运动时,过点 D 作直线 EF 交 x 轴正半轴于 E,交直线 AB 于 F,∠EOD,∠A FD的平分线相交于点 N.若记∠ ODF=α,请用α的式子表示∠ ONF 的大小,并说明理由.。
平面直角坐标系运动点问题

平面直角坐标系运动点问题问题描述在平面直角坐标系中,一个运动点描述如下:点从初始位置$(x_0.y_0)$ 出发,沿着直线运动,以速度 $v$ 前进。
假设 x 轴和 y 轴为运动的水平和垂直方向,分别为正方向。
给定初始位置坐标$(x_0.y_0)$ 和速度 $v$,我们需要计算点在时间 $t$ 后的位置。
解决方法我们可以使用直线的斜率来解决这个问题。
斜率是指直线上任意两点之间纵向的变化量除以横向的变化量。
在这个问题中,我们需要计算点的横向和纵向位置的变化量。
根据直角坐标系的性质,纵向位置随时间的变化是线性的,而横向位置保持不变。
根据上述观察,我们可以得出以下公式:Delta y = v \cdot t其中 $\Delta y$ 表示纵向位置的变化量,$v$ 表示速度,$t$ 表示时间。
另外,我们可以利用点的初始位置 $(x_0.y_0)$ 以及横向位置不变的特性,得出以下公式:x = x_0其中 $x$ 表示点在时间 $t$ 后的横向位置。
根据上述两个公式,我们可以给出点在时间$t$ 后的位置$(x。
y)$:x = x_0 \\y = y_0 + v \cdot t示例假设点的初始位置为 $(1.2)$,速度为 $3$。
我们希望计算点在时间 $t=4$ 后的位置。
根据上述公式:x = 1 \\y = 2 + 3 \cdot 4 = 2 + 12 = 14因此,点在时间 $t=4$ 后的位置为 $(1.14)$。
总结通过使用平面直角坐标系和直线的斜率性质,我们可以计算点在时间 $t$ 后的位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
直角坐标系中的动点问题
例1 已知,Q 为直线y=-2x+6上的一动点。
过Q 点分别作QC ⊥x 轴于C ,QD ⊥y 轴于D 。
(1)若以O 、C 、Q 、D 为顶点的四边形为正方形,求Q 点坐标。
变式:(2)若以O 、C 、Q 、D 为顶点的四边形面积为4,求Q 点坐标。
例2 如图,在平面直角坐标系中,点B 的坐标为(2,0)。
过点B 作
AB ⊥x 轴,交)0(>=m x
m y 的图象于点A ,点P 为y 轴的正半轴上的一个动点,点P 的纵坐标为n ,以PA ,PB 为边作□APBC 。
(1)当n=3时,若点C 恰好落在x 轴上,求m 的值;
y
例2 如图,在平面直角坐标系中,点B 的坐标为(2,0)。
过点B 作AB
⊥x 轴,交)0(>=m x
m y 的图象于点A ,点P 为y 轴的正半轴上的一个动点,点P 的纵坐标为n ,以PA ,PB 为边作□APBC 。
(2)求点C 的坐标(用含m,n 的代数式表示)。
(3)当点A 、P 运动时,是否存在有一个内角为60°的菱形APBC ?若存在,求出所有满足条件的m 的值,并判断此时点C 是否在x
m y =的图象上;若不存在,请说明理由。
(4)点A 、P 在整个运动过程中,是否存在一个m 的值,使□APBC 是矩形且位置唯一?若存在,请直接写出m,n 的值;若不存在,请说明理由。