基于stm32的人形机器人制作
基于STM32F407的双足机器人

基于STM32F407的双足机器人双足机器人是指能够像人类一样用双脚行走的机器人,它具有非常高的技术含量和挑战性。
在现代科技的发展下,双足机器人已经被广泛应用于各种领域,例如医疗机器人、救援机器人、娱乐机器人等。
而基于STM32F407的双足机器人则是一种结合了先进的STM32F407单片机技术和双足机器人技术的新型产品,具有独特的优势和特点。
基于STM32F407的双足机器人在控制系统和运动控制方面具有很高的灵活性和稳定性。
STM32F407是意法半导体公司推出的一款高性能的32位微控制器,其主频可达168MHz,具有丰富的外设接口和强大的处理能力。
这使得基于STM32F407的双足机器人在运动控制和感知处理方面具有很强的实时性和精确性,能够更好地完成各种复杂的动作和任务。
除了运动控制系统,基于STM32F407的双足机器人还具有高度集成的传感器系统。
双足机器人需要通过传感器来感知外部环境和自身状态,以便实时调整自身姿态和动作。
而基于STM32F407的双足机器人可以通过其丰富的外设接口来连接多种传感器,例如惯性传感器、视觉传感器、力觉传感器等,实现对外部环境和自身状态的全面感知和分析。
STM32F407的强大处理能力和丰富的存储空间也为双足机器人的传感器系统提供了充足的资源和支持。
在软件开发方面,基于STM32F407的双足机器人可以充分利用STM32CubeMX和嵌入式开发工具来进行开发。
STM32CubeMX是意法半导体公司提供的一套强大的集成开发环境,可以快速生成STM32F407单片机的初始化代码和外设驱动程序,大大降低了软件开发的复杂度和工作量。
嵌入式开发工具如Keil、IAR等也为基于STM32F407的双足机器人提供了强大的编程和调试功能,使得软件开发更加高效和便捷。
基于STM32F407的双足机器人具有灵活性、稳定性和可扩展性等优势,适合用于各种复杂的环境和任务。
它不仅可以应用于工业生产和物流领域,还能在医疗护理、救援救援和娱乐娱乐领域发挥重要作用。
基于STM32的家庭服务机器人系统设计
基于STM32的家庭服务机器人系统设计家庭服务机器人是一种能够为家庭提供多样化服务的智能机器人。
基于STM32的家庭服务机器人系统设计是通过使用STM32微控制器来控制机器人的功能和行为。
该系统设计主要包括硬件设计和软件设计两个部分。
硬件设计:1.外壳设计:根据实际需要,设计一个坚固、美观的外壳,以保护机器人的内部电路和组件。
2.电源设计:选用适当的电源模块,以提供机器人所需的电力,并确保电源输入的稳定性。
3.传感器:通过使用各种传感器,如红外线传感器、声音传感器和图像传感器等,以获取周围环境的信息。
4.电机和驱动器:安装适当的电机和驱动器,以控制机器人的运动和姿态。
5.显示器和音响:装配合适的显示器和音响,以提供机器人和用户之间的交互界面。
6.通信模块:集成适当的通信模块,如Wi-Fi或蓝牙模块,以实现机器人与其他设备的通信。
软件设计:1.系统运行:首先需要编写机器人的控制程序,以确保机器人的运行和行为符合设计要求。
2.感知与导航:使用传感器数据来定位并建立机器人的内部地图,从而实现机器人的感知和自主导航功能。
3.语音和图像处理:使用语音识别和图像处理算法,使机器人能够理解人类的语言和识别人脸、物体等图像信息。
4.任务执行:根据用户的需求和指令,编写机器人执行各种任务的程序,如打扫、煮饭、看护等。
5.用户界面:设计易于操作和友好的用户界面,使用户能够与机器人进行交互,并向机器人提供指令和反馈。
6.智能学习:利用机器学习算法,不断提高机器人的学习能力和智能水平,使其能够根据用户的习惯和反馈进行自主学习和优化。
总结起来,基于STM32的家庭服务机器人系统设计包括硬件设计和软件设计两个部分,通过适当的硬件模块和程序编写,实现机器人的感知、导航、语音识别、图像处理和任务执行等功能,提供多样化的家庭服务。
同时,通过不断的学习和优化,使机器人能够更好地适应用户的需求,为家庭提供更为便捷和智能化的服务。
基于STM32F407的双足机器人
基于STM32F407的双足机器人双足机器人是一种模仿人类步行方式的机器人,它的动作更加灵活自然,能够适应各种复杂的环境和地形。
在现代科技的发展下,双足机器人已经被广泛应用于教育、娱乐和工业等领域。
而基于STM32F407的双足机器人则是一种新型的机器人,它利用STM32F407单片机搭建控制系统,具有高性能和低功耗的特点,成为了双足机器人中的一个重要组成部分。
一、STM32F407STM32F407是意法半导体公司推出的一款高性能ARM Cortex-M4内核的微控制器,具有丰富的外设和强大的性能优势。
它集成了丰富的外设,包括ADC、DAC、PWM、USART、I2C、SPI、CAN等,适用于各种复杂的应用场景。
STM32F407还具有低功耗和高性能的特点,能够满足双足机器人对于控制系统的要求。
基于STM32F407的双足机器人控制系统由STM32F407单片机、电机驱动器、传感器模块、姿态估计算法等组成。
STM32F407单片机作为控制核心,负责控制双足机器人的动作、平衡和姿态调整等功能。
电机驱动器则用于控制双足机器人的步态和速度,传感器模块用于感知周围环境,姿态估计算法用于实时估计双足机器人的姿态和状态。
1. 高性能:基于STM32F407的双足机器人具有较高的性能优势,能够实现复杂的控制算法和运动规划,从而实现更加灵活和稳定的步行动作。
2. 低功耗:STM32F407单片机具有低功耗的特点,能够为双足机器人提供可靠的电力支持,从而延长机器人的工作时间。
3. 灵活性:基于STM32F407的双足机器人具有较高的灵活性和可扩展性,能够根据不同的应用场景进行自由组合和调整,从而适应不同的任务需求。
1. 教育领域:基于STM32F407的双足机器人可以作为教育工具,用于教学生学习机器人控制和运动规划等知识,激发学生对科学和技术的兴趣。
2. 娱乐领域:基于STM32F407的双足机器人可以作为娱乐机器人,进行各种有趣的动作表演和互动,提供新颖的娱乐体验。
基于STM32的两轮自适应智能机器人系统设计

2017年第12期网址: 电邮:hrbengineer@基于STM32的两轮自适应智能机器人系统设计张峰,姚松丽,王远方,王雨轩(上海工程技术大学机械工程学院,上海201620)摘要:介绍了一种自适应的两轮智能机器人系统,该系统以意法半导体公司的STM32f103作为系统的主控芯片,利用MPU-6050数字式运动处理传感器获取机器人姿态角、超声波传感器检测障碍物和测量距离,结合相应的算法实现机器人的直立平衡、速度和转向控制。
同时基于人性化的考虑,加入蓝牙模块,设计手机APP 以实现对机器人的远程操控,从而完成机器人的自适应系统。
通过软件在线模拟仿真和实体样机调试,最终验证了系统的稳定性,达到了预期的设计效果。
关键词:两轮自适应机器人;蓝牙遥控;模块化;STM32中图分类号:TP 24文献标志码:A 文章编号:1002-2333(2017)12-0054-03Design of Two-Wheeled Adaptive Robot System Based on STM32ZHANG Feng ,YAO Songli,WANG Yuanfang,WANG Yuxuan(College of Mechanical Engineering,Shanghai University of Engineering Science,Shanghai 201620,China )Abstract 院This paper introduces an adaptive two-wheeled intelligent robot system.The STM32F103from STMicroelectronicsis the main chip of the system in which the MPU-6050digital motion sensor is used to obtain the attitude angle of robot,and the ultrasonic sensor is used to detect obstacles and measure distance.It also integrates the corresponding algorithm to realize the vertical balance,the speed and the steering under control.Based on the hommization considerations,mobile phone APP is designed using Bluetooth mode to achieve the remote control of robot.The adaptive system of robot iscompleted.Through online software simulation and physical prototype debugging,the stability and reliability of the system are evaluated,and the expected design effect is obtained.Keywords:two-wheeled adaptive robot;Bluetooth remote;modularization;STM32引言在智能传感器技术及人工智能理论的发展影响下,机器人产业得到了迅猛的发展,其中移动式的智能机器人以其独特的优势被广泛应用于娱探索和军事等领域。
基于STM32F407的双足机器人
基于STM32F407的双足机器人双足机器人是一种模拟人类行走的机器人,可以实现步行、跑步、跳跃等动作。
本文将介绍基于STM32F407的双足机器人的设计原理和实现过程。
我们需要设计机器人的硬件部分。
双足机器人需要具备平衡能力和步行能力。
为了实现这一目标,我们需要在两条腿上安装舵机和传感器。
舵机可以控制腿部的运动,传感器可以检测机器人的倾斜角度和腿部的位置。
基于STM32F407的双足机器人主控制器需要具备较强的计算能力和控制能力。
STM32F407是一款高性能的ARM Cortex-M4微控制器,具有高速的运算能力和多种外设接口。
我们可以将STM32F407作为机器人的主控制器。
接下来,我们需要设计机器人的软件部分。
双足机器人的软件主要包括运动控制算法和姿态控制算法。
运动控制算法用于控制舵机的转动角度,从而实现机器人的步行动作。
姿态控制算法用于保持机器人的平衡,根据传感器的测量值进行控制。
在编程上,我们可以使用Keil MDK进行开发。
Keil MDK是一款功能强大的集成开发环境,可以进行嵌入式软件的开发和调试。
我们可以使用C/C++语言编写机器人的软件,利用STM32F407的外设库函数进行控制。
我们需要对机器人进行测试和调试。
在测试阶段,我们可以通过连接电脑和机器人,通过串口通信进行调试。
我们还可以使用仿真软件进行虚拟测试,以提前检测和解决潜在的问题。
基于STM32F407的双足机器人可以应用于多个领域,例如教育、娱乐和服务机器人等。
通过不断改进和优化,双足机器人的性能和功能将得到进一步提升,为人们带来更多便利和乐趣。
基于STM32F407的双足机器人是一种具有广泛应用前景的机器人系统。
它结合了硬件设计和软件算法,能够实现人类步行动作,并具备平衡能力。
这为机器人技术的发展和应用带来了更多可能性。
一种基于STM32的人形机器人设计
link appraisement
柳加文 孔令彩 吴雪涛
胡泽展 黄海平 朱娟花(通讯作者)河南农业大学机电工程学院
(此项目由河南农业大学大学生创新创业训练项目资助)
图1 舵机分配图图2 舵机控制电路
研究中遇到的问题及解决方法
在实验中遇到很多问题,经过摸索都很好地解决了,比如:自平衡机器人依靠摩擦力来移动,路面的凹凸状况、摩
擦力大小都会影响机器人的行动,导致行走不稳。
这时可以适当给机器人负重,并在脚下增加塑料垫来增大摩擦力,能在一定程°上矫正其移动。
另外,机器人前进或后退时,由
于两脚移动的距离、速°或方向会有微小差异,会导致机器人不能完全按直线行动,可以在机器人另一侧的脚上增加一定重量。
在软硬件的配合下,最终实现了机器人的前进、后退、右侧滑、挥手、鞠躬、配乐跳舞等动作。
STM32的人形机器人设计,包括路串行舵机机器人动作的实现和采用STM32控制24路舵机控制板的方法。
该操作系统利用LORA 通讯模块接收来自遥控器的指令并转换成机器指令发送给机器人舵机,对实现人形机器人不同动作的完成。
图6 线上调整
图5 预处理接线图图4 arduino 操作界面。
基于STM32F4的模拟工业机器人示教系统的设计与实现
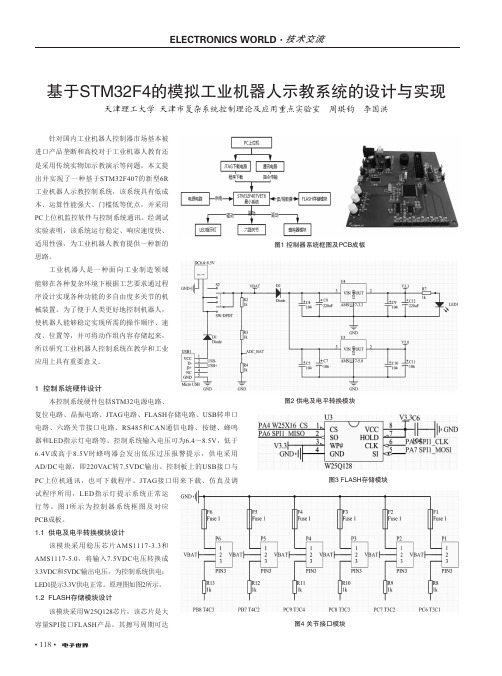
• 118•基于STM32F4的模拟工业机器人示教系统的设计与实现天津理工大学 天津市复杂系统控制理论及应用重点实验室 周琪钧 李国洪图1 控制器系统框图及PCB成板针对国内工业机器人控制器市场基本被进口产品垄断和高校对于工业机器人教育还是采用传统实物加示教演示等问题,本文提出并实现了一种基于STM32F407的新型6R 工业机器人示教控制系统,该系统具有低成本、运算性能强大、门槛低等优点,并采用PC 上位机监控软件与控制系统通讯。
经调试实验表明,该系统运行稳定、响应速度快、适用性强,为工业机器人教育提供一种新的思路。
工业机器人是一种面向工业制造领域能够在各种复杂环境下根据工艺要求通过程序设计实现各种功能的多自由度多关节的机械装置。
为了便于人类更好地控制机器人,使机器人能够稳定实现所需的操作顺序、速度、位置等,并可将动作组内容存储起来,所以研究工业机器人控制系统在教学和工业应用上具有重要意义。
1 控制系统硬件设计本控制系统硬件包括STM32电源电路、图2 供电及电平转换模块复位电路、晶振电路、JTAG 电路、FLASH 存储电路、USB 转串口电路、六路关节接口电路、RS485和CAN 通信电路、按键、蜂鸣器和LED 指示灯电路等。
控制系统输入电压可为6.4~8.5V ,低于6.4V 或高于8.5V 时蜂鸣器会发出低压过压报警提示,供电采用AD/DC 电源,即220VAC 转7.5VDC 输出。
控制板上的USB 接口与PC 上位机通讯,也可下载程序。
JTAG接口用来下载、仿真及调试程序所用,LED 指示灯提示系统正常运行等。
图1所示为控制器系统框图及对应PCB 成板。
1.1 供电及电平转换模块设计该模块采用稳压芯片AMS1117-3.3和AMS1117-5.0,将输入7.5VDC 电压转换成3.3VDC 和5VDC 输出电压,为控制系统供电;LED1提示3.3V 供电正常。
原理图如图2所示。
1.2 FLASH存储模块设计该模块采用W25Q128芯片,该芯片是大容量SPI 接口FLASH产品,其擦写周期可达图3 FLASH存储模块图4 关节接口模块• 119•10万次,容量为128Mb (16M 字节)。
基于STM32双臂魔方机器人的设计

基于STM32双臂魔方机器人的设计双臂魔方机器人是一种用来解魔方的机器人,它基于STM32芯片进行设计和控制。
下面将详细介绍该机器人的设计过程。
首先,双臂魔方机器人的主要硬件部分包括两个机械臂、魔方识别模块、机械臂控制模块和电源模块。
机械臂由电机、舵机和传感器组成,用于实现抓取魔方和旋转魔方的动作。
魔方识别模块使用摄像头和图像处理算法来识别魔方的状态和颜色。
机械臂控制模块通过STM32芯片来控制机械臂的运动,包括抓取、旋转和放置魔方。
电源模块为机器人提供电能供应。
在软件方面,首先需要进行图像处理和识别算法的编写。
使用OpenCV库可以对魔方的图像进行处理,提取各个小块的颜色信息。
然后,使用颜色信息来识别魔方的状态,并生成解决魔方的步骤。
在生成解决步骤后,可以将步骤转化为机械臂的指令,以便机械臂完成相应的动作。
通过STM32芯片和相关编程,可以实现机械臂的控制。
另外,为了方便操作和控制双臂魔方机器人,可以设计一个人机交互界面。
该界面可以通过显示屏和按钮进行控制操作,显示魔方状态和解决步骤。
界面也可以与机械臂控制模块通过串口通信来实现命令的传输和控制。
在进行实际设计和制作时,需要注意以下几点。
首先,机械臂的设计需要考虑力学性能和稳定性,以确保机械臂能够准确地抓取和旋转魔方。
其次,魔方识别模块需要进行图像处理算法和颜色信息的提取,以保证识别的准确性。
另外,机械臂控制模块和STM32芯片的编程也需要进行充分测试和验证,确保机械臂能够按照生成的解决步骤来完成动作。
总之,双臂魔方机器人的设计基于STM32芯片,通过图像处理和识别算法来实现魔方的识别和解决。
机械臂通过STM32芯片进行控制,实现抓取和旋转魔方的动作。
此外,设计还包括一个人机交互界面,便于操作和控制机器人。
在实际设计和制作过程中,需要注意硬件和软件的相互配合,以确保机器人的稳定性和可靠性。
基于STM32和树莓派的四足人形机器人系统
有 0到 3 0 0 。 的转动范 围 , 在此范围 内具备精确位置控制性
能 , 速度 可调 , 一个简 单的控 制指令就 可以 自动转动 到一
个 比较 精确的角度 , 所 以非 常适合 在关节型机器人产品上使
用。
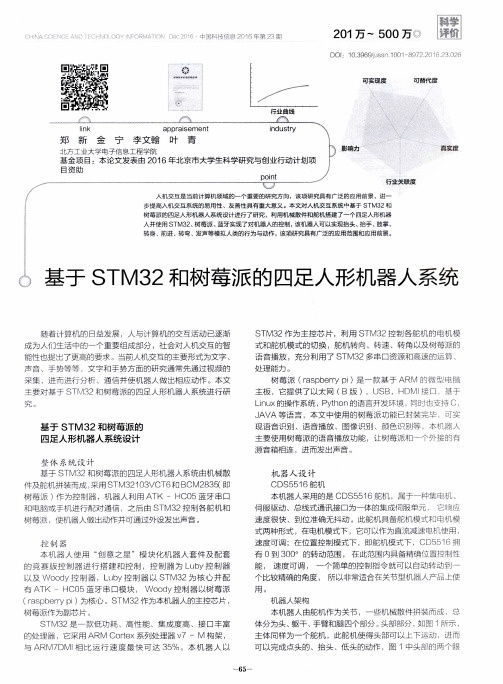
有 ATK —HCO 5蓝牙 串 口模 块 , Wo o d y控制 器 以树莓 派 ( r a s p b e r r y p i )为核心 。S TM3 2作为本机器人的主控芯片 ,
树 莓派的四足人形机器人系统设计进行了研究 ,利用机械散件和舵机搭建 了一 个四足人形机 器
人并使 用 S T M3 2 、 树莓派 、 蓝 牙实现了对 机器人的控制 , 该机器人可以实现抬头 、 抬手、 鼓掌 、 转身 、前进 、 转弯 、 发声等模拟人类 的行 为与动作 , 该项研究具有广泛的应用范围和应用前景 。
树莓 派作为副芯片 。 ST M3 2是 ~ 款 低 功 耗 、 高 性 能 、集 成 度 高 、接 口 丰 富
机 器 人 架 构
本机器人 由舵 机作 为关 节 ,一些机械 散件拼装而 成 .总 体分为头 、 躯干 、 手臂和腿四个部分 。 头部部分 , 如图 1 所示 , 主体 同样为一个舵 机 ,此舵机 使得头部可 以上下运动 进 而 可 以完成点头的 、抬头 、低头的动作 ,图 1中头部的两个 眼
处理能 力 。
树莓 派 ( r a s p b e r r y p i )是一 款基 于 ARM 的微 型 电脯 主板 ,它提供 了以太网 ( B版 ),USB,HDMl 接口 基于 L i n u x的操作系统 , P y t h o n的语言开发环境 , 同时也支持 C, J AV A等 语言 ,本文 中使用 的树 莓派功能 已封装完毕 .可实
基于STM32单机的扫地机器人设计

基于STM32单机的扫地机器人设计一、引言扫地机器人是一种智能化的家用清洁设备,能够自主扫地并清洁地面。
目前市面上的扫地机器人大多采用各种传感器和控制器来实现自主导航和清扫功能。
本文将基于STM32单机设计一款简单的扫地机器人,通过使用STM32的处理能力和丰富的外设接口,实现机器人的自主导航和清扫功能。
二、硬件设计1.控制器选择本设计将采用STM32F4系列的微控制器作为控制器,该系列的处理器性能强大,具有丰富的外设接口,足以满足扫地机器人的控制需求。
2.传感器选择扫地机器人需要有多种传感器来实现自主导航和避障功能,包括超声波传感器、红外传感器、光电编码器等。
这些传感器能够帮助机器人获取周围环境的信息,从而实现自主导航和避障。
3.执行器选择扫地机器人需要有清扫装置,选择合适的电机和驱动器来驱动清扫装置。
还需要有驱动轮来实现机器人的移动。
4.电源管理扫地机器人需要有合适的电源管理模块,能满足各个模块的电源需求,并具备一定的电池管理能力,以便机器人长时间工作。
三、软件设计1.系统架构扫地机器人的软件分为上位机控制程序和下位机控制程序。
上位机控制程序用于与机器人进行通信和控制,下位机控制程序用于处理传感器数据和执行控制指令。
2.传感器数据处理下位机控制程序需要对传感器获取的数据进行处理,包括距离数据的处理、地面清扫状态的判断等。
3.导航算法扫地机器人需要一定的导航算法来实现自主导航功能,比如障碍物避障、路径规划等。
4.电机控制下位机控制程序需要实现对电机和驱动器的控制,包括清扫装置的开启和关闭、驱动轮的驱动。
5.通信模块上位机控制程序需要通过合适的通信模块与下位机进行通信,常用的通信模块有蓝牙模块、Wi-Fi模块等。
四、总体设计通过上述的硬件设计和软件设计,整个扫地机器人系统能够实现自主导航和清扫功能。
下位机控制程序获取传感器数据进行处理,采取相应的控制策略来实现自主导航,并对电机执行控制指令来实现地面清扫。
基于STM32的机器人仿真示教器设计

于振 中 , 蔡 楷 佣
( 江 南 大 学 物 联 网工 程 学 院 , 江苏 无锡 2 1 4 1 2 2 )
摘 要 : 为 了克 服 传 统 机 器 人 示 教 系统 扩 展 性 差 且 较 为 封 闭 等 缺 点 , 设 计 了一 种 基 于 S T M3 2的机 器人 仿 真 示 教 器 。 该 示 教 器 以 S T M3 2作 为 主 控 芯 片 , 引入 p  ̄ C / O S I I实 时操 作 系统 , 并 采 用以 太网通信 的方 式 , 提 高 了 系 统 的 开 放 性 。 通 过 对 利 用 计 算 机 模 拟 得 到的 三维机 器人进 行仿 真操 控 , 验证 该示 教 器的手动 控制 和示 教再 现等基 本功 能 。实验 结果表 明 , 该 仿 真 示 教 器 可 以 灵 活 方 便地 练 习机 器人 的示教操 作 , 达 到模 拟 操 作 实体 机 器 人 的 效 果 , 具有 一定 的 实用价值 。 关键 词 : 示教 器 ; 仿真; 以太 网 ; 开 放 性 中图分类 号 : T P 2 4 2 . 2 文献标 识码 : A D O I :1 0 . 1 9 3 5 8 / j . i s s n . 1 6 7 4 — 7 7 2 0 . 2 0 1 6 . 2 3 . 0 1 1
引用格 式 : 于振 中 , 蔡楷 倜 .基 于 S T M3 2的 机器人 仿真 示教 器设计 [ J ] . 微 型机 与应 用 , 2 0 1 6 , 3 5 ( 2 3 ) : 3 8 _ 4 1 .
De s i g n o f r o b o t s i mu l a t e d t e a c h i n g b o x b a s e d o n S TM3 2
基于STM32仿生六足机器人_毕业设计
基于STM32仿生六足机器人_毕业设计毕业设计(论文) 基于STM32仿生六足机器人学院:电子与信息工程学院专业: XXXXXXXXXXXXXXXX学号: XXXXXXXXXXX作者: XXX指导老师: XXX基于STM32仿生六足机器人电子与信息工程学院 XXXXXXXXXXXX专业作者 XXX 指导教师 XXX【摘要】在科技高速发展的信息社会,机器人在工业,军事,探测等各个领域起着越来越重要和不可替代的位置,机器人研究成为目前世界各国研究的热点。
仿生六足机器人涉及仿生学、机械学、信息技术和传感技术等众多学科,是机器人研究的一大分支。
仿生六足机器人模仿生物界爬行动物的肢体结构,具有良好的机动性和自适应能力,在军事运输、矿山开采、星球探测等众多领域具有广阔前景。
本设计采用ARM内核结构(Cortex-M3)的STM32F103RBT6为主控芯片,通过内部定时器产生脉宽调制信号,以及使用74HC138进行分时复用来控制六足机器人的关节,即18个MG955舵机。
通过BMX-02蓝牙转串口模块连接手机和机器人,实现手机蓝牙遥控。
采用UN2003A电机驱动芯片驱动步进电机,并配合红外传感器使机器人实现智能避障。
由于该机器人拥有18自由度,肢体灵活,还可实现各种类似舞蹈的特殊动作。
【关键词】仿生六足机器人;STM32F103RBT6;舵机控制目录1绪论 (1)1.1课题研究背景意义 (1)1.2仿生六足机器人的现状 (1)1.3本设计系统结构 (2)1.4本论文的组织结构 (2)2肢体结构和步态规划 (3)2.1肢体结构设计 (3)2.2步态规划 (3)2.2.1三角步态 (3)2.3本章小结 (4)3硬件设计介绍与系统各部分工作原理 (5)3.1主控芯片STM32F103RBT6简介 (5)3.2STM32F103RBT6最小系统电路 (5)3.2.1主芯片原理图 (5)3.2.2晶振电路 (6)3.2.3复位电路 (6)3.2.4下载电路 (7)3.3舵机原理与控制 (7)3.3.1舵机内部结构 (7)3.3.2舵机的工作原理错误!未定义书签。
基于STM32F407的双足机器人

基于STM32F407的双足机器人双足机器人是一种仿生机器人,具有双足步行能力,能够模拟人类的步态和动作。
它具有很高的灵活性和稳定性,可以适应不同的地形和环境。
基于STM32F407的双足机器人具有先进的控制系统和智能算法,能够实现复杂的动作和任务。
本文将介绍基于STM32F407的双足机器人的设计原理、控制系统和应用场景。
一、设计原理基于STM32F407的双足机器人主要由机械结构、传感器系统、控制系统和动力系统四个部分组成。
机械结构是双足机器人的骨架,它决定了机器人的外形和运动方式。
传感器系统用于感知环境和身体状态,包括视觉传感器、惯性传感器、力传感器等。
控制系统是双足机器人的大脑,它接收传感器数据并计算出相应的动作指令。
动力系统则负责执行控制系统的指令,驱动机器人进行运动。
1. 高性能处理器:STM32F407是一款高性能的32位微控制器,具有丰富的外设和强大的计算能力,能够满足双足机器人复杂的控制算法和实时运动要求。
2. 多轴驱动:双足机器人需要精确的多轴驱动来实现步行和平衡,STM32F407提供了丰富的PWM输出通道和高速定时器,能够满足机器人的驱动需求。
3. 实时通信:双足机器人需要实时地接收和发送数据,与外部设备进行通信。
STM32F407具有丰富的通信接口和高速外设,能够满足双足机器人的通信需求。
基于STM32F407的双足机器人的设计原理可以满足机器人的高性能计算和实时控制要求,为机器人的稳定步行和复杂动作提供了坚实的技术基础。
二、控制系统基于STM32F407的双足机器人的控制系统包括感知、规划和执行三个部分,实现了双足机器人的全面控制。
感知部分主要通过传感器系统获取环境信息和身体状态,包括视觉、力觉、陀螺仪等传感器,将感知到的数据传输给控制系统。
规划部分主要通过控制算法对感知数据进行处理和分析,得出接下来的运动控制指令。
执行部分主要通过动力系统执行规划好的运动控制指令,控制机器人进行步行和平衡。
基于STM32单机的扫地机器人设计

基于STM32单机的扫地机器人设计随着科技的不断发展,智能家居产品也变得越来越普及。
扫地机器人作为智能家居产品的一种,已经成为现代家庭清洁必备的家电之一。
它能够帮助用户自动清扫地面,提高家庭生活品质。
现在市面上的扫地机器人种类繁多,功能也各异,而其中一些高端产品采用了STM32单片机作为控制核心。
本文将对基于STM32单机的扫地机器人设计进行详细分析和介绍。
一、STM32单片机简介STM32是由意法半导体(STMicroelectronics)推出的32位高性能微控制器系列产品,拥有强大的性能和丰富的外设资源,广泛应用于各种嵌入式系统中。
STM32单片机具有低功耗、高性能、丰富的外设接口等特点,适合用于各种智能家居产品的控制系统。
STM32系列产品的开发工具和技术支持也非常完善,为开发人员提供了便利。
二、扫地机器人的工作原理扫地机器人主要由底盘模块、定位导航模块、清扫模块、电源模块和控制模块等部分组成。
其工作流程一般包括地面扫描、路径规划、清扫作业和自动充电等环节。
控制模块起着核心作用,负责整个扫地机器人的工作流程控制和各模块协调。
三、基于STM32单片机的扫地机器人设计方案基于STM32单片机的扫地机器人设计主要包括底层硬件设计和上层软件设计两个方面。
1. 底层硬件设计底层硬件设计主要涉及各种传感器、执行器及外部设备的接口电路设计。
扫地机器人通常需要激光雷达、超声波传感器、轮式驱动器、吸尘器等硬件模块,这些模块需要与STM32单片机相连,并通过各种通信接口传输数据。
控制模块还需要设计供电管理电路,以便对各模块进行电源控制和供电。
2. 上层软件设计上层软件设计是整个扫地机器人系统的大脑,负责各硬件模块的控制和协调。
基于STM32单片机的扫地机器人控制系统通常采用嵌入式操作系统作为基础,如FreeRTOS或者RT-Thread。
控制系统还需要设计各种传感器数据的处理算法、路径规划算法和清扫作业控制算法等。
基于STM32的六足机器人制作

基于STM32的六足机器人制作【摘要】基于仿生原理,以STM32为控制器的核心,制作动作灵活,结构简单的六足机器人,并且完成了直线、转弯步态的规划和控制。
实验表明成功控制实现三足步态进行直线行走功能。
文中详细介绍了该“蜘蛛”的结构组成、行走原理、步态规划算法与控制系统设计。
【关键词】六足机器人;仿生;步态规划;固定步态机器人技术是融合了机械、电子、传感器、计算机、人工智能等许多学科的知识,涉及到当今许多前沿领域的技术[1]。
轮式车辆在平地公路运输中有着无可替代的用途,在沙地和泥泞的地面履带车辆被广泛应用,足式步行机合适于山地和复杂多障碍地面的移动[2]。
由于多足步行机器人足端点与地面的接触面积小的特点,使机器人能够在足端点可达工作范围内自由调整步行姿态,因而能灵活的选择机械腿的落脚点,能灵活的越过障碍物和小沟壑,使多足步行机器人具有很高的避障、越障能力[3]。
1.仿生行走原理六足机器人作为一个系统,它的运动关节、机械足以及机身构成了机器人的整体,六条机械足与机身通过舵机相连,机械腿的布局是模仿昆虫腿部布局围绕机身形成不完全对称的圆形布局。
本文设计控制六足机器人躯干纵向长150mm,宽130mm,站立时高160mm,共有六条腿,每条腿由三个自由度实现躯干的灵活攀爬。
第一个自由度,由驱动关节带动腿部转节前后摆动;第二个自由度,由驱动关节带动腿部股节上下摆动;第三个自由度,由驱动关节带动腿部胫节上下摆动。
为了增加整个躯干的支撑稳定性,六条腿呈环绕式分布在躯干周围。
舵机选用TR213型号,可以提供达13Kg·cm的扭矩。
2.步态规划和控制实现2.1 步态规划在自然界中,可以观察到很多种的步行动物中的行走步态。
为了描述步态,我们将步行动物的腿部行走分为两种状态[3],一种是支撑状态,是指肢体接触地面,支撑身体的状态;另一种是摆动状态,是指肢体离开地面,向前进方向摆动,动物的行走就是由每条腿的这两种状态交替进行完成的。
STM32的小型仿人机器人控制系统设计
基于STM32的平衡机器人设计

• 128•基于STM32的平衡机器人设计广东工业大学 黄嘉兴随着计算机技术的迅速发展及其应用优势,促进了越来越多的行业往智能化,信息化转变,也促进了以计算机技术为核心的其它技术的发展,比如嵌入式以及人工智能等新一代技术的产生。
其中嵌入式技术是人工智能技术的基础,而机器人则是它们的具体应用。
如何使用嵌入式技术来实现具有一定人工智能的机器人项目,有助于我们综合理解计算机技术并进一步了解其在机器人领域的应用。
前言:计算机是第三次工业革命的代表,其使得传统工业更加机械化和智能化,极大提升了工业生产效率和降低了生产成本,并随着计算机技术的迅速发展,计算机也越来越小型化和集成化,从最初只能用于大型工业到广泛运用于各个行业领域,其计算能力也得到大幅提升,极大地促进了整个社会往信息化,智能化发展方向发展,甚至完全改变了传统的运作模式(孙增择.RoboCup 世界杯与中国机器人大赛[J].机器人技术与应用,2010(4):7-8)。
随着晶体管的大规模应用以及高度集成化,以计算机技术为核心的嵌入式技术得到迅速发展和应用,其主要特点是:以应用为中心,以计算机技术为基础,软硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统(贺龙豹.竞赛用搬运机器人的设计与实现[D].南京:南京财经大学,2013)。
正是由于嵌入式技术的特点,结合人工智能在算法上的可行性,最终促进了机器人技术的迅速发展,并在工业、军事、医疗、环境等各行各业有着广泛的发展和应用,如何将嵌入式技术运用于智能机器人也成为了一个热门的研究方向(高正中,龚群英,宋森森.基于STM32 的智能平衡车控制系统设计[D ].山东科技大学电气与自动化工程学院,山东青岛266590)。
1 两轮平衡机器人简介从机器人的移动方式分,可以分为固定机器人和移动机器人,固定机器人主要指工业生产中的机械臂,移动机器人又可以分为足式机器人和轮式机器人,足式机器人有着更高要求的控制硬件及其程序算法,一般以轮式机器人居多,而轮式机器人又可以分为多轮机器人,两轮机器人,以及单轮机器人。
基于STM32的电梯导轨机器人控制系统设计

基于STM32的电梯导轨机器人控制系统设计电梯导轨机器人是一种利用导轨系统控制的机器人,可用于室内物品搬运、维修等工作。
本文介绍一种基于STM32的电梯导轨机器人控制系统设计。
一、系统设计方案该系统设计方案包括以下四个模块:STM32控制模块、驱动模块、机械结构模块、传感器模块。
其中,STM32控制模块通过与其他模块的交互控制机器人的行动。
1. STM32控制模块STM32控制模块是机器人控制的核心,通过对机器人各个部件的控制实现机器人的移动和动作。
该模块采用STM32F407作为控制芯片,具有高速和高性能。
另外,该模块还设计了一个图形用户界面(GUI),以方便用户控制机器人。
2. 驱动模块驱动模块是控制机器人移动的关键。
机器人的导轨系统由电机和传动系统组成,通过控制电机的旋转来实现导轨系统的移动。
驱动模块使用L298N H桥芯片作为电机驱动芯片,控制电机正、反转和速度控制。
3. 机械结构模块机械结构模块是机器人的载体,由铝合金材料组成,具有轻量化和高强度的特点。
机械结构模块包括机械臂、夹爪和导轨系统。
机械臂通过铰链和导轨与机械结构连接,可以实现机器人的上下运动;夹爪通过舵机驱动,可以实现物品抓取和放置等动作;导轨系统可以实现机器人在导轨上的移动。
4. 传感器模块传感器模块用于检测机器人的环境和状态,以实现机器人的自适应控制。
该模块包括巡线传感器、避障传感器、陀螺仪和编码器。
巡线传感器用于检测机器人在导轨上的位置,以实现自动寻找目标位置的功能;避障传感器用于检测机器人周围的障碍物,以避免机器人与其他物体碰撞;陀螺仪用于检测机器人的姿态,以保持机器人的平衡;编码器用于检测导轨电机的旋转角度,以实现精准的位置控制。
系统软件分为嵌入式软件和上位机软件两部分。
1. 嵌入式软件嵌入式软件采用C语言编写,主要包括驱动程序和控制程序两部分。
驱动程序包括电机驱动程序、传感器驱动程序和通讯驱动程序;控制程序包括状态机控制程序、位置控制程序和运动控制程序。
基于STM32单机的扫地机器人设计

基于STM32单机的扫地机器人设计扫地机器人是当前家用机器人市场中非常受欢迎的一种。
它可以让您的家庭保持清洁和整洁,而不必亲自动手进行清理工作。
本文将介绍基于STM32单机的扫地机器人设计。
1. 硬件构成STM32单机是该扫地机器人的核心部件,它控制机器人的全部动作。
除此之外,该机器人还需要以下硬件部件:(1)电机驱动模块:该模块用于控制机器人的直流电机,它可以让机器人在地面表面上运行。
(2)轮子:轮子用于支撑机器人的构架,使其可以行走并在地面表面上进行清洁。
(3)传感器:传感器模块包括红外线、超声波、光电等多种传感器。
这些传感器用于测量机器人周围环境的信息,以便机器人能够更好地进行工作。
(4)云台:云台是一个控制两个直流电机的小平台,用于支持相机等其他传感器以使其可以进行运动。
(5)电源:电源模块提供机器人需要的所有能源。
2. 软件设计(1)传感器数据采集:传感器数据采集是机器人最重要的工作之一。
在此步骤中,需要完成传感器设备与STM32单机之间的通信,并将传感器读数存储在STM32内存中。
(2)数据预处理:数据预处理是将采集到的数据进行处理和筛选的过程。
在此步骤中,需要筛选出对机器人运行有用的信息。
(3)控制策略:在控制策略中,需要确定机器人应该采取什么动作,以响应传感器读数。
该策略应该基于机器人的实时运动和周围环境信息,并应该使机器人尽可能高效地工作。
(4)数据输出和显示:最后一步是从STM32单机向其他设备输出和显示数据。
这可以通过串口或其他通信机制来实现。
3. 机器人工作流程一般而言,扫地机器人的工作流程分为以下几个步骤:(1)机器人移动:机器人在地面表面上进行移动。
机器人上装有电机驱动装置和轮子,使其能够移动。
(2)数据采集:机器人同时进行传感器数据采集。
这些数据反映了机器人周围环境信息。
(3)数据预处理:传感器数据在存储在STM32单机内存之前,需要经过预处理和调整。
(4)数据分析和控制策略:在此步骤中,机器人使用STM32单机内存中的数据来执行控制算法,以决定下一步该做什么。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要:变形机器人是机器人领域中新兴起的一个研究方向,同时也是当前机器人学研究领域的一个热点和难点。
本课题参照人体骨骼结构并综合考虑运动中模块间的碰撞、结构变化步数以及车型状态等因素,为机器人设计精确构型。
基于机器人结构设计,详细探讨本项目变形机器人人车变形过程,具体展示不同构型的特点及相互之间的转换和衔接,打破变形机器人研究局限,推进本领域关键技术的突破。
本文我们主要对机电一体化产品-变形金刚机器人进行了系统设计,该变形机器人旨在满足四五岁儿童对于变形金刚机器人玩具的需求,可在战车和机器人之间变换,并且各变形处的机构变换设计巧妙,变换的多变性、趣味性和实用性都非常高,在战车和变形后机器人的外观上极为逼真、酷炫,对儿童极具吸引力。
我们首先对市场前景进行了调查和分析,之后查阅相关资料并进行分析,随后进行机器人方案设计及具体的机械结构设计,并绘制机器人总装图和关键零部件图,然后进行传感与控制方案设计,包括硬件与软件设计,试验测试,最后编制课程设计说明书。
本文对于硬件电路的连接和软件控制方面进行了详细的阐明,完成变形金刚机器人变形、行走的功能,并实现无线通讯功能。
目录第一章方案设计 (6)1 机械结构方案设计 (6)2 驱动方案选择 (7)2.1 电机的选择 (7)3 传感器的选择 (7)4 结构的合理性和参数的合理性 (8)第二章动作的总体规划详细方案 (9)1 人形态下的行走设计 (9)2 车形态下的运动设计 (9)3 人车转换的变形设计 (9)第三章软件系统设计 (10)1 软件系统总体方案 (10)2 控制方案与流程 (11)第四章程序 (12)第五章项目心得 (14)第一章方案设计1机械结构方案设计本次任务主要对我们的机电一体化产品-变形金刚机器人进行了系统设计,实现自动变形。
外部机械结构包括作为战车整体外观的躯壳和车顶,用于连接躯壳以及车顶的支架,与支架连接组成战车车头的两个车头灯以及引擎盖,与支架上端连接的头部,与支架中部连接的两条手臂以及与支架下端连接的两条腿,安装于二条手臂上的前轮以及安装于二条腿上的后轮。
变形机器人的设计不同于一般人形机器人的设计。
为了实现人形状态的完备功能,机器人的构型需要依照人类运动关节的构造而设计。
本项目变形机器人采用了15个舵机实现其完整的功能。
首先是变形机器人人形基本结构的设计(如图2-1)。
腿部由6个舵机来实现人形的基本功能,保证变形机器人处于人形状态下能够自由行走,并且能够实现直走、转弯、劈叉等多个功能。
手部应用了4个舵机,能够实现手部的前举、上举等功能。
另外是胸部的设计。
当变形金刚在车形态向人形态的转换过程中,用胸部支架处两个舵机将车前身的两个轮子移动至胸前部,作为人形态的胸部的一部分,再用另外两个舵机的转动通过曲柄来带动胸部滑块的移动,完成胸部的合拢,同时挡板转动覆盖住舵机。
为保证车型机器人(如图2-2、图2-3)的实现,在机器人膝关节处加装了一对直流电机并配有防滑轮作为主动轮,而在机器人的肩部加装了一对防滑轮作为从动轮,由主动轮带动从动轮实现机器人的自由前进。
同时,在变形构型设计上既要考虑在变形过程中模块间的碰撞、一次结构改变的步数以及确保模块集合可以到达必要的位置,又要精确设计车型四轮的安装位置,以及其他构型对其变形过程所造成的影响。
图2-1 机器人人形结构设计图图2-2 机器人车型结构正面图图2-3 机器人车型结构背面图2驱动方案选择2.1电机的选择机体设计的电机有两种,一种是各个关节的驱动电机,另一种是车轮的驱动电机。
对于关节的驱动电机,要求能够转动指定的角度,且能提供一定的力矩。
车轮的驱动电机要求能够连续转动,且能够减速和加速。
根据要求并考虑到成本,关节的驱动电机选择了舵机,车轮的驱动电机选择了直流电机。
电机参数电机种类型号参数舵机MG995 转矩13kg/cm 重量55g直流电机J GA25-370 20rad/s 重量80g3传感器的选择因为涉及到人形模式下的运动,为了增加控制精度,考虑增加陀螺仪以作为辅助考虑到精度要求和成本,选择陀螺仪的型号如下传感器参数型号电压体积姿态测量稳定度4结构的合理性和参数的合理性变形机器人所有模块的运动都基于一套几何学的原理,同时,在变形构型设计上既要考虑在变形过程中模块间的碰撞、一次结构改变的步数以及确保模块集合可以到达必要的位置,又要精确设计车型四轮的安装位置,以及其他构型对其变形过程所造成的影响。
比如在设计初期,我们就遇到了这样的问题,由于两个脚板在变形过程中会发生碰撞和干涉,修改模型和零件耗费了不少时间,因此一定要注意结构的合理性及参数的合理性。
第二章动作的总体规划详细方案1人形态下的行走设计根据变形金刚机器人要实现直线行走、转弯的步态控制功能,最终决定髋关节配置1个自由度,即俯仰(pitch)自由度,膝关节配置 1 个俯仰自由度,踝关节配置有1个自由度,即偏转(yaw)的自由度。
每条腿各配置3个自由度,两条腿共6个自由度。
步态行走时,通过腿部姿态的调整,核心思想是“先移重心后迈脚”,完成直线行走和转弯行走。
髋关节和膝关节的俯仰自由度共同协调动作可完成机器人的在径向平面内的直线行走功能;踝关节的偏转自由度协调动作可实现在侧向平面内的重心转移功能;上述关节的自由度共同协调可实现机器人的静态转弯功能。
具体动作过程即,首先脚板偏转调整重心,随后通过髋关节和膝关节的转动,完成迈腿,按此思想进行调试。
腿部结构三维图如下所示。
图3-1 腿部结构三维模型2车形态下的运动设计为保证车型机器人的实现,在机器人膝关节处加装了一对直流电机并配有防滑轮作为主动轮,而在机器人的肩部加装了一对防滑轮作为从动轮,由主动轮带动从动轮实现机器人的自由前进。
3人车转换的变形设计本项目机器人变形过程中,脚踝上直流电机与舵机、膝盖舵机、腰部舵机照指令旋转,促使变形机器人身体部位前倾,根据惯性,机器人身体部位向前转动落于腿部、腰部部位接触地面、腿部呈现折叠状态。
这时,变形机器人腿关节处装有的车轮便与地面接触,使其变成车型机器人的车轮,从而实现人形到车型的状态。
接着,根据指令,轿车形态的机器人开始运动。
在实现轿车形态与双足形态的转换时,利用机器人的车门即手来做定点支撑,腿部伸直,脚板贴地,利用舵机的力度,使机器人缓缓撑起,从而得到双足的状态。
如图2-1、图2-2所示。
第三章软件系统设计1软件系统总体方案选用“上位机+串口+下位机”的控制系统解决方案。
上位机控制软件的主要功能是对预定的机器人动作进行规划和位置插补,再按照一定时间和次序发送给下位机,实现机器人关节位置和速度控制;下位机主要功能是接收上位机发送的位置信号,根据信号要求产生PWM 波,控制机器人各个关节舵机运动,使机器人按动作规划完成动作。
相应的,下位机主要由串口通信部分、电源、时钟部分、CPU 及接口部分、复位信号五部分组成。
当下位机接收数据时,采用中断方式进行接收,以保证通信的实时性,而下位机发送数据时,则通过调用发送函数完成发送功能。
在接收数据时,须先接收第一个字节的数据,以确定该数据帧占用的字节数,确定数据长度后,将关闭串行通信中断,采用查询方式接收数据,直至接收完该数据帧为止。
下位机数据接收中断服务程序的流程如图5-1所示。
图5-1 下位机数据接收中断服务程序流程图2控制方案与流程在实现轿车形态与双足形态的转换时,利用机器人的车门即手来做定点支撑,腿部伸直,脚板贴地,利用舵机的力度,使机器人缓缓撑起,从而得到双足的状态。
步态行走时,通过腿部姿态的调整,核心思想是“先移重心后迈脚”,完成直线行走和转弯行走。
髋关节和膝关节的俯仰自由度共同协调动作可完成机器人的在径向平面内的直线行走功能;踝关节的偏转自由度协调动作可实现在侧向平面内的重心转移功能;上述关节的自由度共同协调可实现机器人的静态转弯功能。
首先,利用舵机控制板控制腿部姿态,脚板偏转调整重心,随后通过髋关节和膝关节的转动,完成迈腿和变形,按此思想进行调试。
记录下各个舵机的参数变化,利用单片机stm32软件编程,利用无线串口模块实现无线操控。
软件流程图如下图所示。
第四章程序部分程序如下:单片机超时处理单片机每隔200ms发送一次数据单片机延时50ms返回第五章项目心得本次机电产品设计主要研究了变形金刚机器人,基于机器人结构设计,重点研究变形机器人人车变形的过程,参照人体骨骼结构并综合考虑运动中模块间的碰撞、结构变化步数以及车型状态等因素,为机器人设计精确构型,具体展示不同构型的特点及相互之间的转换和衔接,打破变形机器人的研究局限,推进本领域关键技术的突破,实现技术上的创新。
我们首先进行了可行性分析,方案的比较和设计,硬件和软件部分的设计,同时还进行了三维图的绘制,我们组还制作了动画的仿真,总的来说这次课程设计的任务量是比较大的。
在课设过程中大家相互讨论,方案的选择和设计的思路也最终越来越清晰。
这次课程设计对我们来说是一次挑战,之前很少参加类似的竞赛或项目,大家挤出时间,有质量的完成了课程设计,这对我们来说也是一次很好的历练。
但由于技术水平有限,本次设计仍存在一些控制上的不足,有待完善,需要进一步深入研究改进。
最后,由衷的感谢学校为我们提供的这次非常有意义的锻炼动手能力的机会,也非常感谢老师和学长们的耐心指导,我们会努力做到最好!(注:可编辑下载,若有不当之处,请指正,谢谢!)。