基于CC2541蓝牙模块与单片机的串口通信
单片机与蓝牙通信技术的实现与应用
单片机与蓝牙通信技术的实现与应用随着无线通信技术的飞速发展,蓝牙技术已经成为了众多电子设备之间无线通信的首选技术。
而单片机作为一种微型计算机,也广泛应用于各种电子设备中。
本文将介绍单片机与蓝牙通信技术的实现与应用,着重探讨了通信原理、编程方法以及应用案例。
一、单片机与蓝牙通信的原理1. 蓝牙通信原理蓝牙是一种短距离无线通信技术,采用全球通用的ISM频段,具有低功耗、低成本、低复杂度等特点。
蓝牙设备之间通过无线电波进行通信,每个设备都有一个唯一的蓝牙地址,可以通过建立连接实现设备之间的数据传输。
2. 单片机通信原理单片机是一种集成了微处理器、存储器和各种外设接口的微型计算机,通过编程控制实现各种功能。
单片机的通信原理与计算机通信类似,通过串口、I2C、SPI 等接口与外部设备进行数据交换。
3. 单片机与蓝牙通信原理单片机与蓝牙通信的原理是通过串口通信实现。
单片机通过串口发送数据给蓝牙模块,蓝牙模块通过无线电波把数据传输给其他设备。
反之,其他设备通过蓝牙接收到数据后,再通过串口接收到单片机。
二、单片机与蓝牙通信的实现方法1. 硬件连接首先,需要将蓝牙模块与单片机进行硬件连接。
一般来说,蓝牙模块的RXD和TXD引脚分别连接到单片机的TXD和RXD引脚,同时将它们的地线连接在一起。
2. 编程实现接下来,需要通过编程来实现单片机与蓝牙模块的通信。
以C语言为例,可以使用串口通信函数来发送和接收数据。
首先,需要初始化串口通信参数,如波特率、数据位、校验位等。
然后,可以使用串口发送函数发送数据,使用串口接收函数接收数据。
通过编写对应的代码,单片机可以与蓝牙模块进行数据交换。
3. 数据解析在单片机接收到蓝牙模块发送的数据后,需要进行数据解析。
这包括解析数据的格式、提取关键信息等。
根据具体的应用需求,可以通过字符串处理函数、数值转换函数等实现数据的解析和处理。
三、单片机与蓝牙通信的应用案例1. 远程控制单片机与蓝牙模块的组合可以实现远程控制功能。
51单片机与蓝牙模块的串口通信

#include <>#include <>#include<>#include ""#include ""#define uint unsigned int#define uchar unsigned char#define Nop() _nop_()sbit P10 = P1^0; /*定义独立对地按键端口*/sbit P11 = P1^1; /*定义独立对地按键端口*/sbit P12 = P1^2; /*定义独立对地按键端口*/sbit P13 = P1^3; /*定义独立对地按键端口*/ 592MHz TL1=0XFD ;TH0=0;TL0=0;TR1 = 1; // timer 1 runSCON = 0x50; //UART为模式1,8位数据,允许接收 PCON |= 0x80 ; //SMOD=1; Baud加倍IE |= 0x90 ; //Enable Serial InterruptTR1 = 1 ; // timer 1 runEA=1;ET0=1;}void send(uchar cc){SBUF=cc;while(TI==0);TI=0;}void send_f(uchar ccc){send(' ');send('<');send('F');send(ccc);send('>');}void call_out(){uchar i;send('(');for(i=0;i<m;i++){send(CallOut_Num[i]);}send(')');m=0;}void interrupt_pro(){string_write(0,1,reci_buff);lcd_char_write(14,1,mun_to_char[temp/10]); //for testlcd_char_write(15,1,mun_to_char[temp%10]); //for testif(temp==')') CallIn_flag=1;//|temp=='$' |temp=='%'else if(temp=='$'){ lcd_delay(5);//if(temp=='$')string_write(0,0,clr);string_write(0,0,reci_buff);}else switch(temp){case'X':string_write(0,0,clr);string_write(0,0,"Disconnet");break;case 'P':string_write(0,0,clr);string_write(0,0,"Pairing"); break;case 'S':string_write(0,0,clr);string_write(0,0,"Linking"); break;case 'O':string_write(0,0,clr);string_write(0,0,"Connect"); break;case 'R':string_write(0,0,clr);string_write(0,0,"Ring");//string_write(5,0,CallIn_Num);break;case 'D':string_write(0,0,clr);string_write(0,0,"Ding");// string_write(5,0,CallIn_Num);break;case 'I':string_write(0,0,clr);string_write(0,0,"Talking"); break;case 'L':string_write(0,0,clr);string_write(0,0,"Call failed"); break;case 'A':string_write(0,0,clr);string_write(0,0,"MP3 playing"); break;case 'E':string_write(0,0,clr);string_write(0,0,"Call release "); break;case 'H':string_write(0,0,clr);string_write(0,0,"A2DP connected ");break;case 'V':string_write(0,0,clr);string_write(0,0,"A2DP disconnected");break;// case ')':x=0; break; //for(i=0;i<16;i++)lcd_char_write(i,1,lcd_table[i]); /*显示标题*/default:break;}//temp=''; //for test}void key_pro(){uchar i,key_value_buff;key_value_buff = key_scan();if(key_value_buff != 0) //有按键动作{switch(key_value_buff) /*显示按键*/{case 0x18: //0if(call_flag){CallOut_Num[m]='0';lcd_char_write(m+2,0,'0');m++;}else if(!shift_flag){ send(' ');send('A'); //Answerlcd_char_write(3,1,'0'); //可以不显示出来lcd_char_write(8,1,'A');lcd_char_write(9,1,' ');}else{ send_f('P');lcd_char_write(3,1,'0');lcd_char_write(8,1,'F');lcd_char_write(9,1,'P');}break;case 0x28://1if(call_flag){CallOut_Num[m]='1';lcd_char_write(m+2,0,'1');m++;}else if(!shift_flag){ send(' ');send('H'); //Hang uplcd_char_write(3,1,'1');lcd_char_write(8,1,'H');lcd_char_write(9,1,' ');}else{ send_f('L');lcd_char_write(3,1,'1');lcd_char_write(8,1,'F');lcd_char_write(9,1,'L');}break;case 0x48://2if(call_flag){CallOut_Num[m]='2';lcd_char_write(m+2,0,'2');m++;}else if(!shift_flag){ send(' ');send('R'); //Rejectlcd_char_write(3,1,'2');lcd_char_write(8,1,'R');lcd_char_write(9,1,' ');}else{ send_f('U');lcd_char_write(3,1,'2');lcd_char_write(8,1,'F');lcd_char_write(9,1,'U');}break;case 0x88://3if(call_flag){CallOut_Num[m]='3';lcd_char_write(m+2,0,'3');m++;}else if(!shift_flag){ send(' ');send('L'); //Rediallcd_char_write(3,1,'3');lcd_char_write(8,1,'L');lcd_char_write(9,1,' ');}else{ send_f('F');lcd_char_write(3,1,'3');lcd_char_write(8,1,'F');lcd_char_write(9,1,'F');}break;case 0x14://4if(call_flag){CallOut_Num[m]='4';lcd_char_write(m+2,0,'4');m++;}else if(!shift_flag){ send(' ');send('U'); //Vol uplcd_char_write(3,1,'4');lcd_char_write(8,1,'U');lcd_char_write(9,1,' ');}else{ send_f('B');lcd_char_write(3,1,'4');lcd_char_write(8,1,'F');lcd_char_write(9,1,'B');}break;case 0x24://5if(call_flag){CallOut_Num[m]='5';lcd_char_write(m+2,0,'5');m++;} else if(!shift_flag){ send(' ');send('D');//Vol downlcd_char_write(3,1,'5');lcd_char_write(8,1,'D');lcd_char_write(9,1,' ');}else{ send_f('S');lcd_char_write(3,1,'5');lcd_char_write(8,1,'F');lcd_char_write(9,1,'S');}break;case 0x44://6if(call_flag){CallOut_Num[m]='6';lcd_char_write(m+2,0,'6');m++;}else if(!shift_flag){ send(' ');send('0'); //lcd_char_write(3,1,'6');lcd_char_write(8,1,'0');lcd_char_write(9,1,' ');}else{ send(' ');send('G');send('x');lcd_char_write(3,1,'6');lcd_char_write(8,1,'G');lcd_char_write(9,1,'x');}break;case 0x84://7if(call_flag){CallOut_Num[m]='7';lcd_char_write(m+2,0,'7');m++;}else if(!shift_flag){ send(' ');send('V'); //Voice diallcd_char_write(3,1,'7');lcd_char_write(8,1,'V');lcd_char_write(9,1,' ');}else{ send(' ');send('n');lcd_char_write(3,1,'7');lcd_char_write(8,1,'n');lcd_char_write(9,1,' ');}break;case 0x12://8if(call_flag){CallOut_Num[m]='8';lcd_char_write(m+2,0,'8');m++;}else if(!shift_flag){ send(' ');send('Z');//Call transferlcd_char_write(3,1,'8');lcd_char_write(8,1,'Z');lcd_char_write(9,1,' ');}else{ send(' ');send('p');lcd_char_write(3,1,'8');lcd_char_write(8,1,'p');lcd_char_write(9,1,' ');}break;case 0x22://9if(call_flag){CallOut_Num[m]='9';lcd_char_write(m+2,0,'9');m++;}else if(!shift_flag){ send(' ');send('Q'); //Disconnectlcd_char_write(3,1,'9');lcd_char_write(8,1,'Q');lcd_char_write(9,1,' ');}else{ send(' ');send('z'); //Call transferlcd_char_write(3,1,'9');lcd_char_write(8,1,'z');lcd_char_write(9,1,' ');}break;case 0x42://A *if(call_flag){CallOut_Num[m]='*';lcd_char_write(m+2,0,'*');m++;}else{ send(' ');send('Y');//Versionlcd_char_write(3,1,'A');lcd_char_write(8,1,'Y');lcd_char_write(9,1,' ');}break;case 0x82://B #if(call_flag){CallOut_Num[m]='#';lcd_char_write(m+2,0,'#');m++;}else{ send(' ');send('T'); //Set auto answerlcd_char_write(3,1,'B');lcd_char_write(8,1,'T');lcd_char_write(9,1,' ');}break;case 0x11: if(!call_flag){send(' ');send('t'); //Clr auto answerlcd_char_write(3,1,'C');lcd_char_write(8,1,'t');lcd_char_write(9,1,' ');}break;case 0x21: if(!call_flag){send(' ');send('M');//Set volume setlcd_char_write(3,1,'D');lcd_char_write(8,1,'M');lcd_char_write(9,1,' ');}break;case 0x41:if(!call_flag){send(' ');send('m'); //Clr volume setlcd_char_write(3,1,'E');lcd_char_write(8,1,'m');lcd_char_write(9,1,' ');}break;case 0x81:if(!call_flag){send(' ');send('N'); //Set auto linklcd_char_write(3,1,'F');lcd_char_write(8,1,'N');lcd_char_write(9,1,' ');}break;default:break;}while(key_scan()!=0);/*等待按键放开*/}scan_key_port = 0xff; /*释放矩阵按键端口*/delay_1ms(5);if((P10==0)||(P11==0)||(P12==0)||(P13==0)){delay_1ms(10); /*延时去抖动*/if((P10==0)||(P11==0)||(P12==0)||(P13==0)){if(P10==0) {lcd_char_write(3,1,'a'); send(' ');send('S');lcd_char_write(8,1,'S');} //Linkelse if(P11==0){call_flag=~call_flag;if(call_flag){string_write(0,0,clr);lcd_char_write(0,0,0);} //显示拨号状态符号else { for(i=0;i<16;i++) CallOut_Num[i]=' ';string_write(0,0,clr);string_write(3,0,"Welcome!");}}else if(P12==0) {lcd_char_write(3,1,'c'); send(' ');send('P');lcd_char_write(8,1,'P');} //Pairelse if(P13==0){shift_flag=~shift_flag;if(shift_flag) lcd_char_write(15,0,'s');else lcd_char_write(15,0,' ');}while((P10==0)||(P11==0)||(P12==0)||(P13==0));/*等待按键放开*/}}delay_1ms(5);}void Timer0Interrupt() interrupt 1 //定时器0中断服务函数{TH0 =0;TL0 =0;TR0=0; if(reci_flag1==1) reci_flag=1;z=0;if(call_flag==1) time++;}//串口接收中断函数void serial () interrupt 4 using 3{if (RI){RI = 0 ;temp=SBUF; // if(temp!=10)reci_buff[z]=temp;z++; if(z>15) z=0;TR0=1;reci_flag1=1;}}/*void serial () interrupt 4 using 3 //串口接收字符串{if (RI){RI = 0 ;temp=SBUF;if(temp=='R'){CallIn_flag=1;}reci_flag=1;}}bool RIwait(uint i){ //等待时间到,返回1while(i--){if(RI) return 0;}; //等待时间内 RI = 1 ,返回0 return 1; //串行接收停止位的中间时,RI 置1}uchar ReadSbuf(void){//从SBUF 读数据,可得到接收的数据uchar TmpSbuf;TmpSbuf=SBUF;SCON=0x50;return TmpSbuf;}void ComService(void) interrupt 4{uchar TmpSBUF,i=0;EA=0;ES=0;if(RIwait(RiWaitTimer)) goto ExitCom;switch(ReadSbuf()){case 'R'://current callfor(i=0;i<20;i++){if(RIwait(RLongiWaitTimer)) break;//goto ExitCom;[i]=ReadSbuf();TelTmpNum[i]=[i]; // new add if[i]=='\r')break;}[i]='\n';TelTmpNum[i]='\n'; // new add if(StandbyStatus==IsStandby){=IR_BLUETOOTHPOWERON;}else{if==BlueToothWorkInCalling)=IR_BLUETOOTHINTEL;else// =IR_BLUETOOTHIN;_bIRKey= IR_BTPHONECAllIN;// =IR_BTPHONECAllIN;}break;}ExitCom:SCON = 0x50; //模式1 ,REN = 1 ,允许接收数据ES=1;EA=1; //Enable UART}*//* if(call_flag==1&&key_value_buff==0)//拨号状态{n++;if(n>555){for(time=18;call_flag==1&&time>0&&CallOut_Num[0]>='#';time--){if(P11!=0){delay_1ms(222);delay_1ms(222);string_write(2,0,CallOut_Num);delay_1ms(222);delay_1ms(222);delay_1ms(222);delay_1ms(222);string_write(2,0," ");delay_1ms(222);delay_1ms(222);}else {call_flag=0;string_write(0,0,clr);string_write(3,0,"Welcome!");}}call_flag=0;n=0;string_write(0,0,clr); // goto start string_write(3,0,"Welcome!");}}*/。
蓝牙模块与51单片机串口通信

蓝牙模块与51单片机串口通信引言本文档旨在介绍如何使用蓝牙模块与51单片机进行串口通信。
蓝牙模块是一种常用的无线通信设备,可以用于传输数据和与其他蓝牙设备进行交互。
本文将提供基本的步骤和示例代码,以帮助读者了解蓝牙模块与51单片机之间的串口通信原理和方法。
硬件准备在开始蓝牙模块与51单片机串口通信之前,您需要准备以下硬件设备:- 51单片机开发板- 蓝牙模块软件准备为了实现蓝牙模块与51单片机之间的串口通信,您需要进行以下软件准备工作:1. 安装串口通信库:根据您使用的51单片机型号,选择合适的串口通信库并将其安装到开发环境中。
2. 研究串口通信命令:了解51单片机的串口通信命令集,包括发送数据、接收数据和设置串口参数等命令。
串口通信步骤下面是使用蓝牙模块与51单片机进行串口通信的基本步骤:1. 连接蓝牙模块:将蓝牙模块与51单片机连接,确保电源和引脚连接正确。
2. 开启串口通信:启动51单片机上的串口通信功能。
3. 设置串口参数:根据蓝牙模块和通信需求,设置合适的串口参数,如波特率、数据位、停止位和校验位等。
4. 发送数据:使用串口通信命令将需要传输的数据发送至蓝牙模块。
5. 接收数据:通过串口通信命令接收来自蓝牙模块的数据。
6. 处理数据:对接收到的数据进行处理,根据需求作出相应的响应。
示例代码以下是使用C语言编写的示例代码,演示了蓝牙模块与51单片机进行串口通信的基本操作:include <reg51.h>void main(){// 初始化串口参数// 配置波特率、数据位、停止位和校验位等// 进行串口通信while(1){// 发送数据至蓝牙模块// 接收来自蓝牙模块的数据// 处理接收到的数据}}结论通过本文档,您已经了解了蓝牙模块与51单片机串口通信的基本原理和方法。
根据您的具体需求,您可以根据本文提供的步骤和示例代码,自行实现蓝牙模块与51单片机之间的串口通信功能。
希望本文对您有所帮助!。
基于单片机的蓝牙接口设计及数据传输的实现

基于单片机的蓝牙接口设计及数据传输的实现引言:蓝牙技术是一种短距离无线通信技术,可以实现不同设备之间的数据传输。
在基于单片机的蓝牙接口设计中,我们可以利用蓝牙模块与单片机进行通信,并通过单片机控制和处理接收到的数据。
这篇文章将介绍基于单片机的蓝牙接口设计的实现方法以及数据传输的实现。
一、基于单片机的蓝牙接口设计1. 硬件准备:我们需要准备一个蓝牙模块和一个单片机。
蓝牙模块可以选择常见的HC-05或HC-06等模块,而单片机可以选择常见的51单片机或者Arduino等开发板。
2.连接蓝牙模块:将蓝牙模块的TXD引脚连接到单片机的RXD引脚,将蓝牙模块的RXD引脚连接到单片机的TXD引脚。
同时,将蓝牙模块的VCC引脚连接到单片机的5V引脚,将蓝牙模块的GND引脚连接到单片机的GND引脚。
3. 编写程序:使用单片机开发环境如Keil或Arduino IDE等,编写程序进行蓝牙模块的初始化和数据的接收与发送。
具体编程方法取决于使用的单片机和蓝牙模块型号。
1.数据的发送与接收:使用单片机程序控制蓝牙模块实现数据的发送与接收。
对于数据的发送,我们可以通过单片机的串口功能将数据发送给蓝牙模块。
对于数据的接收,我们可以编写程序监听蓝牙模块的串口接收中断,并在接收到数据时进行处理。
2.数据的解析与处理:接收到的数据可能是二进制数据或者字符数据,需要进行解析和处理。
对于二进制数据,我们可以使用位运算将其解析为具体的数字或者状态。
对于字符数据,我们可以使用字符串处理函数将其解析为具体的命令或者参数。
3.数据的反馈与应答:接收到的数据可能需要反馈或者应答给发送端。
通过设置相应的单片机输出引脚,我们可以控制相关的外设如LED灯或者继电器进行响应。
同时,我们也可以通过蓝牙模块将数据发送回给发送端,进行进一步的交互或者控制。
三、应用实例基于单片机的蓝牙接口设计可以应用于各种领域,如智能家居、车载设备等。
以智能家居为例,我们可以利用单片机和蓝牙模块控制家中的灯光、温度、浇花等设备。
手机通过蓝牙模块与单片机通信

手机通过蓝牙模块与单片机通信手机通过蓝牙模块与单片机通信第一步.编写好串口程序/*********************************************名称单片机蓝牙功能手机通过蓝牙模块与单片机通信作者蒋院校南航********************************************/#includesbit dula=P2^6; //数码管段选,锁存器控制信号sbit wela=P2^7; //数码管位选,锁存器控制信号unsigned char k,a;unsigned char flag;void delay1ms(unsigned int f)//延时程序{unsigned int i,j;for(i=0;i<f;i++)< bdsfid="125" p=""></f;i++)<> for(j=0;j<120;j++);}void receivem(void) //接受程序{while(RI==1){RI=0;flag=1;}}void timer_int(void) //定时器初始化{TMOD=0x11;//00010001SCON =0x50;T2CON=0x30;RCAP2H=0xFF;RCAP2L=0xDC;EA=1;TR0=1;TR2=1;ET0=ET2=1;}void time0(void) interrupt 1 using 1 //中断函数{TH0=0xFC;TL0=0x18;receivem();//定时将SBUF接收}void main(){flag=0;wela=0;dula=0;timer_int();while(1){if(flag==1){dula=0;P1=SBUF;a=SBUF;P0=SBUF;dula=1;dula=0;wela=0;P0=0x7e;wela=1;wela=0;delay1ms(10);SBUF=a;while(!TI);TI=0;delay1ms(10);flag=0;}}}注意:这里使用了52单片机定时器2作为波特率发生器!//设置T2为工作方式2,作为波特率时钟 TCLK = 1; RCLK = 1; C_T2 = 0;//T2的输入时钟为主时钟的2分频,不采用外部输入T2MOD&= ~DCEN_;//递增计数方式/************************************************************** ****** * T2作为串口波特率时钟,设置T2初始值: * MCU工作时钟Fclk = 11.0592MHz * 机器周期Tm = 12/11.0592us = 1.085us, * T1初值= 0x10000 - Fclk/(32*BaudRate),即0xFFDC*************************************************************** ***** RCAP2H = 0xFF; RCAP2L = 0xDC;P0接的是数码管P1接的是8个发光二极管这样做的是更好的相互显示数据接收是否正确。
基于蓝牙模块的单片机双机通信的实现

基于蓝牙模块的单片机双机通信的实现作者:纪利琴王健熊伟来源:《科技视界》2019年第19期【摘要】蓝牙通信,作为一种短距离的数据通信方式,应用非常广泛。
但基于单片机的蓝牙设备之间的通信,许多人在实际开发、设计时,总是遇到不同的问题,无法实现。
本文运用51单片机作为蓝牙设备的控制器,实现了基于蓝牙通信的数据传输,并详细介绍了设计调试的过程,给电子爱好者或设计开发者提供一定的方法及经验。
【关键字】蓝牙通信;单片机;配置中图分类号: TP368.1 文献标识码: A 文章编号: 2095-2457(2019)19-0042-001DOI:10.19694/ki.issn2095-2457.2019.19.0180 引言目前,使用较为广泛的短距离无线数据传输方式有蓝牙通信(Bluetooth),红外通信(IrDA)、Zig-Bee通信以及无线局域网(Wi-Fi)通信等等。
其中,蓝牙通信以其体积小、集成度高、开放的标准接口等特点,广泛应用于移动终端设备、智能家电、医疗器械、工业自动控制等领域[1]。
然基于蓝牙通信的设备多以单片机与PC机、手机蓝牙与单片机、PC机与PC 机等方式实现,单片机与单片机基于蓝牙的通信,理论上可以,但没有实际实现的例子。
本设计实现的即是单片机与单片机之间通过蓝牙的方式进行通信。
1 组成框图本设计组成框图见图1所示,其中将一方设为主机,另一方设为从机。
主机在结构上由单片机和蓝牙通信模块组成,从机同样由单片机与蓝牙模块组成,且为了测试两则通信的成功与否,在从机单片机端,输出用八个指示灯指示通信的状态。
主机单片机和从机单片机均为51单片机,蓝牙通信模块均为HC08。
2 硬件设计主机由单片机最小系统模块和蓝牙模块组成,蓝牙HC08模块与单片机之间的通信有4根线,2根电源线,2根信号线。
单片机与蓝牙模块之间的通信为串行通信,即一个发送信号线、一个接收信号线。
单片机与蓝牙模块连接图见图2左图所示。
蓝牙与单片机通信原理

蓝牙与单片机通信原理
蓝牙(Bluetooth)是一种无线通信技术,可以用来实现设备之间的短距离数据传输。
在单片机系统中,蓝牙通信常被用于实现与外部设备的互联,如手机、电脑等。
蓝牙与单片机的通信原理主要涉及以下几个方面:
1. 通信模式选择:在单片机与蓝牙模块之间,可以选择不同的通信模式,如主-从模式、广播模式等。
主-从模式中,单片机
作为主设备,通过发送命令来控制蓝牙模块;从机模式中,单片机作为被控制的设备,接收来自蓝牙模块的指令。
2. 串口通信协议:蓝牙模块与单片机之间的通信常采用串口通信方式,一般为UART接口。
通过配置串口通信参数,如波
特率、数据位、校验位等,可以确保蓝牙模块与单片机之间的数据传输正确。
3. AT指令集:蓝牙模块的通信一般通过AT指令来实现。
AT
指令是一种通用的命令语法,用于发送和接收数据。
单片机可以通过发送不同的AT指令来控制蓝牙模块的功能,比如建立
连接、发送数据等。
4. 数据传输:在通信过程中,单片机可以通过串口发送数据给蓝牙模块,蓝牙模块再将数据传输给与其连接的设备。
同样地,蓝牙模块可以接收来自其他设备的数据,并通过串口发送给单片机。
5. 数据解析:单片机接收到蓝牙模块传输的数据后,需要进行数据解析。
通过解析数据,单片机可以获取到相应的命令或者数据内容,从而根据需求进行相应的处理。
总的来说,蓝牙与单片机通信原理涉及到通信模式选择、串口通信协议配置、AT指令使用、数据传输和数据解析等方面。
掌握这些原理,可以实现单片机与蓝牙模块之间的可靠通信,并实现各种功能的扩展。
《2024年基于单片机的蓝牙接口设计及数据传输的实现》范文

《基于单片机的蓝牙接口设计及数据传输的实现》篇一一、引言随着科技的快速发展,无线通信技术已成为现代电子产品的重要组成部分。
蓝牙技术以其低成本、低功耗和高度兼容性,在无线通信领域中占据了重要地位。
本文将探讨基于单片机的蓝牙接口设计及数据传输的实现,重点介绍设计原理、实现方法和应用场景。
二、设计原理1. 硬件组成基于单片机的蓝牙接口设计主要由单片机、蓝牙模块和其他必要的外围电路组成。
其中,单片机作为核心控制器,负责处理数据和协调各部分的工作;蓝牙模块则负责无线通信,实现数据的收发。
2. 通信协议蓝牙通信采用低功耗蓝牙(BLE)技术,通过蓝牙模块与单片机之间建立无线连接,实现数据的传输。
在数据传输过程中,遵循蓝牙通信协议,确保数据的可靠性和稳定性。
三、接口设计1. 接口类型根据应用需求,设计合适的接口类型。
常见的接口类型包括串口、SPI、I2C等。
在本设计中,采用串口作为主要的数据传输接口,实现单片机与蓝牙模块之间的通信。
2. 接口电路设计接口电路设计是蓝牙接口设计的关键部分。
在电路设计中,需要考虑到信号的稳定性、抗干扰性和传输速率等因素。
通过合理的电路设计和布局,确保接口的可靠性和稳定性。
四、数据传输实现1. 数据发送单片机通过串口将待发送的数据传输至蓝牙模块。
蓝牙模块接收到数据后,按照蓝牙通信协议进行封装,并通过无线方式发送至目标设备。
2. 数据接收目标设备接收到蓝牙模块发送的数据后,按照蓝牙通信协议进行解封装,并将数据通过串口传输至单片机。
单片机对接收到的数据进行处理和存储。
五、实现方法及步骤1. 硬件选型与采购根据设计需求,选择合适的单片机和蓝牙模块。
确保所选硬件具有良好的性能和稳定性,以满足实际应用的需求。
2. 电路设计与制作根据接口电路设计,制作电路板。
在制作过程中,需要注意电路的布局和抗干扰措施,以确保电路的可靠性。
3. 程序设计与调试编写单片机和蓝牙模块的程序,实现数据的收发和处理。
在程序调试过程中,需要确保数据的准确性和可靠性,以及对异常情况的处理能力。
单片机与蓝牙模块通信技术研究与案例分析

单片机与蓝牙模块通信技术研究与案例分析技术的快速发展使得蓝牙模块在单片机中的应用变得越来越广泛。
蓝牙作为一种无线通信技术,具有低功耗、短距离、高传输速率等特点,非常适合于单片机与外部设备进行通信。
本文将对单片机与蓝牙模块通信技术进行研究,并通过具体的案例分析展示其应用。
一、单片机与蓝牙模块通信原理单片机与蓝牙模块通信主要是通过串口通信来实现的。
现场可编程门阵列(FPGA)是一种半导体器件,可根据用户的需求进行编程,并实现特定的功能。
FPGA中的硬件描述语言可以对芯片内部的逻辑电路进行编程,实现与单片机的通信。
通过在单片机中编写相应的代码,我们可以实现与FPGA的通信,并通过蓝牙模块将数据传输到远程设备。
二、单片机与蓝牙模块通信技术的研究1. 通信协议在单片机与蓝牙模块之间进行通信时,需要选择合适的通信协议。
常用的通信协议有UART、SPI和I2C等。
UART通信协议是最常见的一种,其发送和接收数据的速度可以通过波特率进行调整。
SPI通信协议用于通信速度要求较高的场景,它需要使用多个引脚进行通信。
I2C通信协议适用于通信双方芯片引脚有限的情况,可以通过两根线进行数据传输。
2. 蓝牙模块选择不同的项目需要选择合适的蓝牙模块。
蓝牙模块有很多种类型,包括经典蓝牙模块和低功耗蓝牙模块。
经典蓝牙模块适用于音频传输、数据传输等场景,而低功耗蓝牙模块适用于需要长时间待机的场景。
根据项目需求,选择合适的蓝牙模块很重要。
3. 通信距离蓝牙模块的通信距离决定了单片机与外部设备之间的数据传输范围。
一般来说,蓝牙模块的通信距离在几十米以内,如果需要更远的通信距离,可以采用信号增强器或者选择其他的通信方式。
三、单片机与蓝牙模块通信案例分析以智能家居系统为例,进行单片机与蓝牙模块通信的案例分析。
在智能家居系统中,单片机通过蓝牙模块与用户的手机进行通信,实现对家居电器的远程控制。
首先,将蓝牙模块与单片机连接,并进行相应的配置。
《2024年基于单片机的数据串口通信》范文

《基于单片机的数据串口通信》篇一一、引言在现代电子技术和计算机应用领域中,单片机的使用已成为一项关键技术。
串口通信是单片机与其他设备或计算机进行信息交互的常用方式之一。
本文将详细介绍基于单片机的数据串口通信技术,探讨其原理、实现方法及在现实应用中的价值。
二、单片机与串口通信概述单片机,即微控制器,是一种集成电路芯片,集成了中央处理器、内存、可编程输入/输出接口等设备,是构成电子系统的核心部分。
而串口通信是一种基于数据序列传输的信息交互方式,广泛应用于各类设备的接口电路。
通过串口通信,单片机能够与PC或其他外设进行信息交互和指令传递。
三、串口通信原理串口通信通过数据终端设备(DTE)和数据通信设备(DCE)之间的双向传输来实现。
其原理基于串行通信协议,将信息编码为一位接一位的串行数据流进行传输。
串口通信主要包括RS-232、RS-485等标准,具有低成本、低功耗等优点。
在单片机系统中,通过设置相应的串口参数(如波特率、数据位、停止位等),实现与外部设备的串行通信。
四、基于单片机的数据串口通信实现基于单片机的数据串口通信主要涉及硬件和软件两部分。
硬件部分包括单片机及其外设的接口电路,如RS-232电平转换电路等。
软件部分则需要编写单片机程序,实现对串口通信的初始化和数据传输等功能。
在软件实现方面,主要涉及以下步骤:1. 初始化串口:设置串口的波特率、数据位、停止位等参数。
2. 发送数据:通过编写发送函数,将需要传输的数据按照协议格式发送出去。
3. 接收数据:通过编写接收函数,接收外部设备发送的数据并按照协议格式进行解析。
4. 数据处理:对接收到的数据进行处理和存储,如存储到内存或输出到显示屏等。
五、应用实例及价值基于单片机的数据串口通信在许多领域都有广泛的应用,如工业控制、智能家居、医疗设备等。
例如,在智能家居中,我们可以通过单片机和串口通信技术实现对灯光、窗帘等设备的远程控制;在工业控制中,通过单片机与传感器或执行器的串口通信,可以实现对设备的监控和控制等功能。
《2024年基于单片机的数据串口通信》范文

《基于单片机的数据串口通信》篇一一、引言随着科技的进步和物联网的飞速发展,单片机作为一种核心的微控制器,其应用范围日益广泛。
而其中,数据串口通信技术更是单片机与外部设备进行信息交互的重要手段。
本文将详细介绍基于单片机的数据串口通信技术,包括其原理、应用及优化措施。
二、单片机的数据串口通信原理单片机的数据串口通信是一种异步通信方式,其基本原理是将待传输的数据按位依次传输,每一位数据都占据固定的时间长度。
串口通信的主要特点在于通信线路简单,传输距离较远,适合于分布式系统和多机通信。
在单片机中,串口通信通常由串口控制器实现。
串口控制器主要包括波特率产生器、数据发送器、数据接收器等部分。
其中,波特率产生器负责产生串口通信所需的波特率;数据发送器负责将待发送的数据按位逐一发送;数据接收器则负责接收外部设备发送的数据。
三、基于单片机的数据串口通信应用基于单片机的数据串口通信广泛应用于各种嵌入式系统和物联网设备中。
例如,可以通过串口将单片机的数据传输到PC或其他设备上,实现数据的监控、分析和存储。
同时,串口通信还可用于单片机与其他单片机或外部设备之间的数据交互,实现多机协同控制和信息共享。
四、优化措施为了确保基于单片机的数据串口通信的稳定性和可靠性,需要采取一系列优化措施。
首先,应合理设置波特率,以确保数据的传输速率和准确性。
其次,应采用差错控制技术,如奇偶校验、帧头帧尾校验等,以检测和纠正传输过程中的错误。
此外,还应采取软件和硬件抗干扰措施,如滤波、去抖等,以降低外界干扰对通信质量的影响。
五、结论基于单片机的数据串口通信技术具有线路简单、传输距离远、成本低等优点,是单片机与外部设备进行信息交互的重要手段。
通过了解其原理、应用及优化措施,我们可以更好地利用这一技术实现各种嵌入式系统和物联网设备的通信需求。
然而,随着科技的不断进步和物联网的不断发展,我们还需要不断研究和探索新的通信技术和方法,以满足更高的通信需求和更复杂的应用场景。
基于CC2541的低功耗蓝牙模块的设计
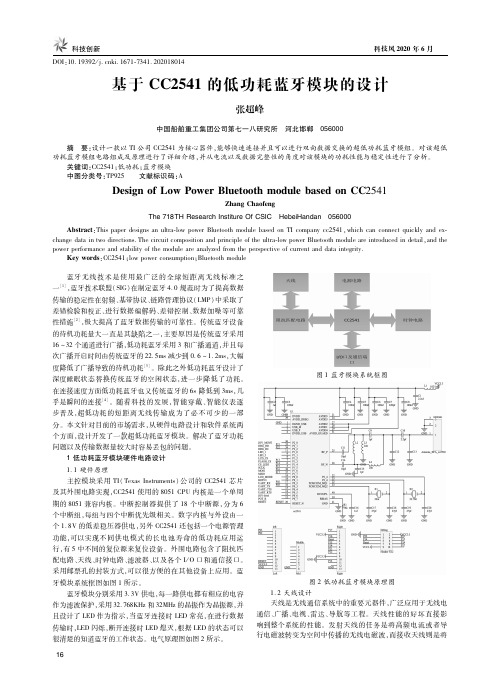
DOI:10.19392/j.cnki.1671 7341.202018014基于CC2541的低功耗蓝牙模块的设计张超峰中国船舶重工集团公司第七一八研究所 河北邯郸 056000摘 要:设计一款以TI公司CC2541为核心器件,能够快速连接并且可以进行双向数据交换的超低功耗蓝牙模组。
对该超低功耗蓝牙模组电路组成及原理进行了详细介绍,并从电流以及数据完整性的角度对该模块的功耗性能与稳定性进行了分析。
关键词:CC2541;低功耗;蓝牙模块中图分类号:TP925 文献标识码:ADesignofLowPowerBluetoothmodulebasedonCC2541ZhangChaofengThe718THResearchInstitureOfCSIC HebeiHandan 056000Abstract:Thispaperdesignsanultra lowpowerBluetoothmodulebasedonTIcompanycc2541,whichcanconnectquicklyandexchangedataintwodirections.Thecircuitcompositionandprincipleoftheultra lowpowerBluetoothmoduleareintroducedindetail,andthepowerperformanceandstabilityofthemoduleareanalyzedfromtheperspectiveofcurrentanddataintegrity.Keywords:CC2541;lowpowerconsumption;Bluetoothmodule 蓝牙无线技术是使用最广泛的全球短距离无线标准之一[1],蓝牙技术联盟(SIG)在制定蓝牙4.0规范时为了提高数据传输的稳定性在射频、基带协议、链路管理协议(LMP)中采取了差错检验和校正、进行数据编解码、差错控制、数据加噪等可靠性措施[2],极大提高了蓝牙数据传输的可靠性。
基于CC2541蓝牙模块与单片机的串口通信
基于CC2541蓝牙模块与单片机的串口通信摘要蓝牙技术作为一种无线数据与语音通信的开放性全球规范,可提供低功耗、短距离的无线空中接口,在各种固定与移动设备之间实现无线通信。
在移动通信、无线数据采集、无线遥控与遥测、计算机网络及自动控制等多种领域,蓝牙技术都有着广泛的应用。
蓝牙协议规范具有多个层次,完整的蓝牙协议栈的开发是一项很复杂的工程,而在大多数嵌入式应用中,只是需要实现基本的无线数据传输功能,并不需要实现全部的蓝牙协议栈。
针对此类应用,若是能提供一套实用的蓝牙无线接口、实现一个通用的无线数据传输模块,就可以比较有效地缩短开发周期,降低开发成本。
蓝牙通讯最初设计初衷是方便移动电话(手机)与配件之间进行低成本、低功耗无线通信连接,现在已经成为IEEE802.15标准,得到全球上万家厂商支持。
本文通过对美国德州仪器半导体公司(TI)开发的CC2541蓝牙模块与51单片机搭建电路实现无线通信技术。
BLE(Bluetooth Low Energy),蓝牙 4.0 标准里的一个子集,蓝牙 4.0 分为两部分,一个是能够兼容传统蓝牙的高速部分,另外就是这里的BLE,的两大显著特点:BLE功耗低,速率低。
所以你就别打算用BLE 来做音频传输或者文件传输了,目前BLE最大的传输速率只能达到4~5K 字节/每秒。
BLE 协议栈,蓝牙4.0 里的BLE,只是一个协议规范,而BLE 协议栈则是该协议的代码实现。
蓝牙组织SIG,只负责制定协议,而协议如何实现,则需要各个芯片公司完成。
可以这样理解,BLE 协议栈是芯片公司预先编好的源码或者库。
关键词:蓝牙单片机通信BLE4.0一.绪论1.背景介绍蓝牙技术的最初倡导者是五家世界著名的计算机和通信公司:爱立信Ericsson、国际商用机器IBM、英特尔Intel、诺基亚NoMa和东芝Toshiba。
1998年5月,以爱立信为首,此五家IT巨人共同提出了一种近距离无线数字通信的技术标准,目标是实现最高传输速率可达1Mb/s(有效传输速率为720Kb/s),最大传输距离为10m的无线通信技术,即蓝牙技术,并成立了国际化组织蓝牙SIG(SpecialInterest Group),致力于蓝牙规范的制定和蓝牙技术在全球范围内的推广。
CC2541,请问在工程选项中使能串口后HAL
CC2541,请问在工程选项中使能串口后HAL2017年8月31日09:23:47 ,分享我的低功耗下使用串口的方式协议栈版本: ble_sdk_1.4.2.2 simpleBLEPeripheral1、工程配置如下INT_HEAP_LEN=3072HALNODEBUGOSAL_CBTIMER_NUM_TASKS=1HAL_AES_DMA=TRUEHAL_DMA=TRUEPOWER_SAVINGxPLUS_BROADCASTERHAL_LCD=FALSEHAL_LED=TRUEHAL_KEY=FALSEHAL_UART=TRUE2、在npi.h代码中做如下修改#if !defined( NPI_UART_FC )#define NPI_UART_FC FALSE#endif // !NPI_UART_FC3、在_hal_uart_dma.c 文件中修改 DMA_PM 为0#if !defined( DMA_PM )#if defined POWER_SAVING#define DMA_PM 0#else#define DMA_PM 0#endif // POWER_SAVING#endif // !DMA_PM4、ble休眠进入之前,使用串口的RX引脚外部中断来唤醒ble,配置如下:(我放在 SimpleBLEPeripheral_Init 函数中,串口初始化函数后面)void initRxExterInterrupt(void){P0SEL &= ~(0x08); //P0.3 TX 设置为通用I/O口P0DIR &= ~(0x08); //P0.3 TX 设置为输入P0SEL &= ~(0x04); //P0.2 设置为通用I/O口P0DIR &= ~(0x04); //P0.2 设置为输入P0IFG &= ~(0x04); //P0.2 设置为输入PICTL |= 0; //P0端口下降沿触发P0IEN |= (0x04); //P0.2 RX 中断使能IEN1 |= 0x20; //端口P0中断使能EA = 1; //开总中断U0CSR &= ~0x40; //关闭串口接收使能}5、在外部中断服务函数中,要关闭RX 引脚的外部中断,函数如下:void initRxUart(void){IEN1 &= ~0x20; //端口P0中断关闭P0SEL |= (0x08); //P0.3 TX 设置为外设串口TX功能P0DIR |= (0x08); //P0.3 TX 设置为输出}6、外部中断服务函数如下#pragma vector = P0INT_VECTOR__interrupt void P0_ISR(void){HAL_ENTER_ISR();if(0x04 & P0IFG) //判断是否是 P0.2 RX 引脚中断{initRxUart();//唤醒后执行定时任务,可以这个任务中使用函数关闭低功耗osal_start_timerEx( simpleBLEPeripheral_TaskID, SBP_PERIODIC_EVT, 5 );CLEAR_SLEEP_MODE();//退出休眠,进入工作状态HAL_BOARD_INIT();//切换到外部32M 晶振并且等待稳定}P0IFG = 0; //清中断标志P0IF = 0; //清中断标志,IRCON[5],P0口中断HAL_EXIT_ISR();}7、在第六步启动的定时任务中,static void performPeriodicTask( void )中使用下面两句代码重新初始化串口,和关闭低功耗NPI_InitTransport(NpiSerialCallback); //重新初始化串口osal_pwrmgr_device( PWRMGR_ALWAYS_ON ); // 不在进入低功耗printf(“wake up.\r\n”);8、重新进入低功耗的方法:// makes sure LEDs are OFFHalLedSet( (HAL_LED_1 | HAL_LED_2), HAL_LED_MODE_OFF );HCI_EXT_ClkDivOnHaltCmd( HCI_EXT_ENABLE_CLK_DIVIDE_ ON_HALT );HCI_EXT_HaltDuringRfCmd( HCI_EXT_HALT_DURING_RF_EN ABLE );//关闭定时事件,降低功耗osal_stop_timerEx( simpleBLEPeripheral_TaskID, SBP_PERIODIC_EVT );initRxExterInterrupt(); //重新初始化 rx 为外部中断osal_pwrmgr_device( PWRMGR_BATTERY );//打开 OSAL 进入低功耗的开关。
手机蓝牙与单片机的通信如何实现?

手机蓝牙与单片机的通信如何实现?
手机蓝牙与单片机的通信有两种实现方式:使用蓝牙模块;使用带有蓝牙功能的单片机。
实现这两种方式的前提是:首先手机必须有蓝牙功能,其次手机上有能够实现蓝牙通信的APP软件。
一、单片机连接蓝牙模块与手机蓝牙通信
这种方式实现起来简单多了,蓝牙模块与单片机之间采用串口通信方式,对于单片机的串口程序,相信搞单片机的人都很熟悉,并且都能够很轻松的搞定串口程序,所以对于这种实现方式,不用多说,对单片机有所了解的人,都能轻松搞定。
二、使用带有蓝牙功能的单片机与手机蓝牙通信
现在很多单片机都自带了蓝牙功能,像TI的CC2540(这个芯片是基于51内核的,开发起来相对要简单),TI最新推出的还有CC2640系列,这个是基于ARM cortex m3内核的,还有nordic公司的等等,这个开发起来就有一定难度了,不过好的一点是,这些厂家一般都有退出蓝牙开发包,开发者借助这种工具能够比较快速地开发出来。
不过一般情况下,只有用量较大的公司,芯片厂家才会免费提供这些软件包,而对于一般用户,可能需要付费。
《2024年基于单片机的数据串口通信》范文

《基于单片机的数据串口通信》篇一一、引言在现代电子系统中,单片机作为一种微控制器,被广泛应用于各种设备的控制与数据处理中。
随着通信技术的快速发展,串口通信以其简单、稳定、可靠的特点,成为了单片机与外部设备之间数据交换的主要方式之一。
本文将介绍基于单片机的数据串口通信的基本原理、设计方法、应用领域及其在实际项目中的应用实践。
二、数据串口通信的基本原理串口通信,又称为串行通信,是指按照位序(即比特)依次传输数据的通信方式。
这种通信方式依赖于单个的字节(即位序列)在两个或多个设备之间进行传输。
在单片机系统中,串口通信通常由UART(通用异步收发器)实现。
UART的主要功能是将接收到的串行数据转化为并行数据,供单片机处理;同时,也将单片机的并行数据转化为串行数据发送出去。
三、单片机的串口通信设计1. 硬件设计:单片机与外部设备之间的硬件连接通常需要一根发送线(TX)和一根接收线(RX)。
在连接时,需要根据设备的具体型号和引脚分配来确定实际的接线方式。
2. 软件设计:软件设计主要涉及串口初始化的设置、数据的发送与接收等。
在初始化阶段,需要设置串口的波特率、数据位、停止位等参数。
在数据传输过程中,通过中断或轮询的方式对接收到的数据进行处理。
四、串口通信的应用领域1. 工业控制:在工业控制系统中,单片机通过串口与其他设备进行数据交换,实现对设备的控制与监控。
2. 智能家居:在智能家居系统中,单片机通过串口与其他传感器、执行器等设备进行通信,实现智能控制与节能管理。
3. 医疗设备:在医疗设备中,单片机通过串口与其他设备进行数据传输,如心电图机、血压计等。
4. 无线通信:在无线通信系统中,单片机通过串口与其他无线模块进行数据交换,实现无线通信功能。
五、实际应用案例分析以智能家居中的温度控制系统为例,该系统采用单片机作为主控制器,通过串口与其他温度传感器、执行器等设备进行通信。
当温度传感器检测到室内温度高于设定值时,将数据通过串口发送给单片机。
CC254x_BLE串口调试-IAR
CC254x_BLE串口调试-IAR2015-11-13经过一天多的努力,在Ti 的CC2541射频芯片上,终于实现了printf() 打印调试信息。
下面将这一个调试的过程记录下来:1.软件平台:a. IAR for 8051 8.30.2b.TI 蓝牙协议栈:BLE-CC254x-1.4.0c.程序例程为:simpleBLEPeripheral2.硬件平台:AmoMCU公司的SmartRF V4.0 开发板软件调试的详细步骤:1.因为 E:\Texas Instruments\BLE-CC254x-1.4.0\Projects\ble (我将协议栈安装在E:\Texas Instruments\下)目录下有许多工程,为了不影响以后调试其它的工程,先将SimpleBLEPeripheral工程复制一份,并将其重命名为:SimpleBLEPeripheral-SerialPort2.打开工程,在项目中新建SerialPort.c 、SerialPort.h文件,保存到E:\TexasInstruments\BLE-CC254x-1.4.0\Projects\ble\SimpleBLEPeripheral-SerialPort\Source文件夹。
3.将步骤2中的文件添加至工程中;编写代码。
SerialPort.h中的代码:00001: #ifndef __SERIALPORT_H__00002: #define __SERIALPORT_H__00003:00004: #include "hal_uart.h"00005: #include "osal.h"00006:00007: /*外部函数声明*/00008: extern void SerialPort_Init(void);00009: extern void SerialPortCB( uint8 port, uint8 event );00010:00011: #endif /*__SERIALPORT_H__*/SerialPort.c中的代码:00001: #include "SerialPort.h"00002: #include <stdio.h>00003: /*00003: ************************************************************************00003: ******00004: * @fn SerialPort_Init00005: *00006: * @brief This routine initializes the transport layer and opens t00006: he port00007: * of the device. Note that based on project defines.00008: *00009: * input parameters00010: *00011: * @param00012: *00013: * output parameters00014: *00015: * @param None.00016: *00017: * @return None.00018: *00019: * 备注:编写此函数可已参考NPI_InitTransport() (npi.c文件) 函数00020: */00021:00022: void SerialPort_Init(void)00023: {00024: halUARTCfg_t uartConfig;00025: uartConfig.baudRate = HAL_UART_BR_57600;00026: uartConfig.configured = TRUE;00027: uartConfig.flowControl = HAL_UART_FLOW_OFF;//关闭流控00028: uartConfig.flowControlThreshold = 48;00028: //流控制阈值,当开启flowControl时,该设置有效00029: uartConfig.rx.maxBufSize= 128;00030: uartConfig.tx.maxBufSize= 128;00031: uartConfig.intEnable = TRUE;//开启中断00032: uartConfig.idleTimeout = 6;00033: uartConfig.callBackFunc = SerialPortCB;00034:00035: // start UART00036: // Note: Assumes no issue opening UART port.00037: (void)HalUARTOpen(HAL_UART_PORT_0, &uartConfig );00038: }00039:00040: /*00040: ************************************************************************ 00040: ******00041: * @fn SerialPortCB00042: *00043: * @brief00044: *00045: * input parameters port ‐ UART端口00046: * event ‐ NULL00047: *00048: * @param00049: *00050: * output parameters00051: *00052: * @param None.00053: *00054: * @return None.00055: *00056: */00057: void SerialPortCB( uint8 port, uint8 event )00058: {00059: uint16 rxBufLen;00060: //uint8 *rxBuf = NULL;00061: uint8 rxBuf[128] = {0};00062: (void) event;00063:00064: rxBufLen = Hal_UART_RxBufLen(port);00065: if(rxBufLen) //串口接收到数据00066: {00067: HalUARTRead(port,rxBuf,rxBufLen);//将接收到的数据存入rxBuf中00068: HalUARTWrite(port,rxBuf,rxBufLen);//将接收到数据通过串口输出到终端00069: }00070: }00071:00072: /*00073: * 函数名: putchar00074: * 说 明:此函数为重写IAR中的putchar 函数,将printf()函数重定向至串口(这 00074: 里重定向至串口0)。
《2024年基于单片机的数据串口通信》范文

《基于单片机的数据串口通信》篇一一、引言在现代电子设备中,单片机作为控制中心的重要组成部分,经常需要进行数据的收发传输。
尤其是在需要进行多设备之间的信息交换和控制的情况下,单片机的串口通信技术就显得尤为重要。
本文将详细介绍基于单片机的数据串口通信技术,包括其原理、应用及实现方法。
二、单片机串口通信原理单片机串口通信是一种异步通信方式,通过数据终端设备(DTE)与数据通信设备(DCE)之间的串行数据线(TX/RX)进行数据传输。
在串口通信中,发送方和接收方通过共享的时钟信号进行同步,并通过特定的协议(如波特率、停止位、校验位等)来确保数据的正确传输。
基于单片机的串口通信主要依赖于单片机的串行接口(UART),通过该接口,单片机可以实现与其他设备的双向数据传输。
在数据传输过程中,UART会根据约定的波特率、停止位和校验位等参数对数据进行编码和解码,从而确保数据的准确性和可靠性。
三、单片机串口通信的应用单片机串口通信在许多领域都有广泛的应用,如工业控制、智能家居、无线通信等。
下面将重点介绍几个方面的应用:1. 工业控制:在工业控制系统中,单片机通过串口与其他设备进行数据交换和控制,实现对设备的远程监控和操作。
2. 智能家居:在智能家居系统中,单片机通过串口与其他智能设备进行通信,实现设备的联动和智能化控制。
3. 无线通信:在无线通信领域,单片机通过串口与其他无线模块进行数据传输,实现无线通信功能。
四、基于单片机的数据串口通信的实现方法基于单片机的数据串口通信的实现方法主要包括以下几个步骤:1. 硬件连接:将单片机的TX/RX引脚与需要通信的设备连接起来,建立数据传输通道。
2. 初始化设置:根据需要设置波特率、停止位、校验位等参数,以确保数据的正确传输。
3. 数据发送与接收:通过单片机程序实现数据的发送与接收功能。
发送方将需要传输的数据按照约定的协议进行编码后发送给接收方;接收方接收到数据后进行解码并处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于CC2541蓝牙模块与单片机的串口通信
一、CC2541器件概述CC2541是一款针对低能耗以及私有2.4GHz应用的功率优化的真正片载系统(SoC)解决方案。
它使得使用低总体物料清单成本建立强健网络节点成为可能。
CC2541将领先RF收发器的出色性能和一个业界标准的增强型8051MCU、系统内可编程闪存存储器、8kBRAM和很多其它功能强大的特性和外设组合在一起。
CC2541非常适合应用于需要超低能耗的系统。
这由多种不同的运行模式指定。
运行模式间较短的转换时间进一步使低能耗变为可能
二、CC2541芯片的特性参数CC2541是一款针对蓝牙低能耗以及私有2.4GHz应用的功率优化的真正片载系统(SoC)解决方案。
它使得使用低总体物料清单成本建立强健网络节点成为可能。
CC2541将领先RF收发器的出色性能和一个业界标准的增强型8051MCU、系统内可编程闪存存储器、8kBRAM和很多其它功能强大的特性和外设组合在一起。
CC2541上CC2541非常适合应用于需要超低能耗的系统。
这由多种不同的运行模式指定。
运行模式间较短的转换时间进一步使低能耗变为可能。
如果CC2540上的USB未启用并且CC2541上的I2C/额外I/O未启用,那么CC2541与CC2540在6mmx6mm方形扁平无引脚(QFN)40封装内引脚兼容。
与CC2540相比,CC2541提供更低RF流耗。
CC2541没有CC2540所具有的USB接口,并在TX模式中提供较低的最大输出功率CC2541还增加了1个HWI2C接口。
CC2541与CC2533优化RF4CEIEEE802.15.4SoC引脚兼容。
CC2541有2个不同的版本:分别具有128kB和256kB闪存的的CC2541F128/F256。
1、特性(1)射频
2.4GHz蓝牙符合低能耗规范和私有的RF片载系统
支持250kbps,500kbps,1Mbps,2Mbps的制器内核数据速率出色的链路预算,不使用外部前段而支持长距离应用高达0dBm的可编程输出功率。