基于航空摄影测量三维建模作业指导手册
基于有人机倾斜航空摄影技术快速进行城市三维实景生产

基于有人机倾斜航空摄影技术快速进行城市三维实景生产摘要:利用倾斜航空摄影测量技术进行城市三维实景建模是近年来国内测绘热点高新技术之一。
相比较传统常规三维建模技术工艺,该技术具有工期短、成本低、精度高、多数据源、成果类型多,三维场景真实、建模过程自动化等无可比拟的优势,本文结合具体生产项目快速进行城市三维实景生产过程。
关键词:倾斜航空摄影测量城市三维实景建模一、引言随着我国城市信息化进程的快速推进,“智慧城市”是城市信息化发展的高级阶段。
而精细化的城市三维实景模型作为城市规划、建设、管理和信息化建设的基础数据得到了日益广泛的应用并逐渐成为“智慧城市”空间数据体系的重要内容。
然而,在城市三维实景模型建设解决方案中,传统的航空航天摄影测量技术主要针对地形地物顶部进行测量,而对起伏明显的地形、地物侧面的纹理和三维几何结构等信息获取一直十分有限,而倾斜航空摄影测量因此成为近年来国际上发展十分迅速的一项高新三维建模技术。
相比较利用大比例尺地形图人工建模、机载Lidar建模和地面数据采集车建模等传统建模方案,采用倾斜航空摄影测量技术进行城市三维实景建模具有工期短、成本低、精度高、多数据源、成果类型多,三维场景真实、建模过程自动化等无可比拟的优点。
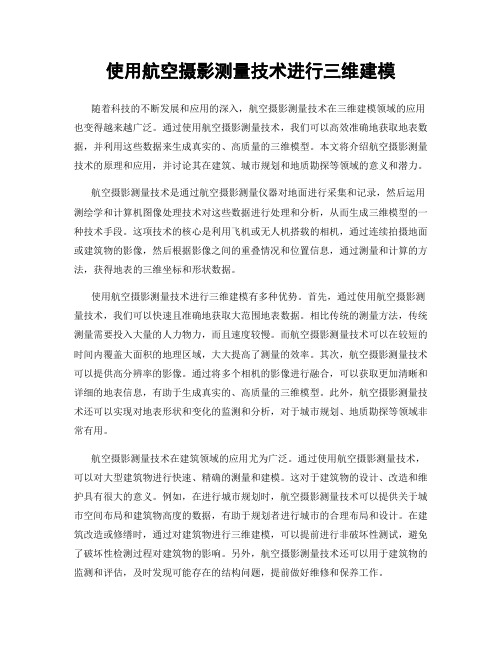
二、倾斜航空摄影技术介绍倾斜航空摄影技术是国际测绘领域近些年发展起来的一项高新技术,它颠覆了以往正射影像只能从垂直角度拍摄的局限,通过在同一飞行平台上搭载多台传感器,同时从前、后、左、右和下视等多个不同的角度对地观测,采集航空影像(图1)。
在建立建筑物表面模型的过程中,相比垂直影像,倾斜影像有着显著的优点,因为它能提供更好的视角去观察建筑物侧面。
倾斜航摄有如下特点:1.反映地物周边真实情况,相对于正射影像,倾斜影像能让用户从多个角度观察地物,更加真实的反映地物的实际情况,极大的弥补了基于正射影像应用的不足。
2.倾斜影像可实现单张影像量测,通过配套软件的应用,可直接基于成果影像进行包括高度、长度、面积、角度、坡度等的量测。
测绘航空摄影作业指导书
测绘航空摄影作业指导书一、作业目的测绘航空摄影作业是一种高效、精确的测绘手段,能够获取大范围、高分辨率的地理数据。
本指导书旨在提供测绘航空摄影作业的具体步骤和要求,确保作业的准确性和效率。
二、作业准备1. 确定作业范围和目标:明确需要测绘的区域范围和具体目标。
2. 确定航空器和设备:选择适合的航空器和摄影设备,确保其性能满足作业需求。
3. 制定作业计划:根据作业范围和目标,制定详细的作业计划,包括起飞点、航线规划等。
4. 安全措施:确保作业期间的安全,包括飞行员和操作人员的安全培训、航空器安全检查等。
三、作业流程1. 飞行前准备- 确认天气状况:确保作业期间的天气状况适宜航空摄影作业。
- 检查设备:对航空器和摄影设备进行全面检查,确保其正常工作。
- 飞行员培训:对飞行员进行必要的培训,确保其具备作业所需的技能和知识。
2. 航线规划- 根据作业范围和目标,制定详细的航线规划,包括起飞点、航线方向、航点位置等。
- 考虑地形和障碍物:在航线规划中考虑地形和障碍物的分布,确保飞行的安全性和作业的准确性。
3. 飞行执行- 根据航线规划,执行航空摄影作业,确保航线的准确性和飞行的稳定性。
- 实时监控:在飞行过程中实时监控航空器的状态和摄影设备的工作情况,及时调整作业策略。
4. 数据处理- 将摄影数据传输至地面处理中心,进行数据的整理和处理。
- 数据校正:对摄影数据进行几何校正和辐射校正,确保数据的准确性和一致性。
- 数据融合:将不同时间、不同角度的摄影数据融合,生成完整的地理数据。
5. 数据分析和应用- 对处理后的地理数据进行分析和应用,为相关行业和科研机构提供地理信息支持。
四、作业要求1. 准确性:作业过程中要求保持较高的准确性,确保测绘数据的精度和一致性。
2. 安全性:作业期间要严格遵循航空安全规定,确保飞行和作业的安全。
3. 效率:根据作业计划,合理安排作业时间和资源,提高作业效率。
4. 数据保密:对测绘数据要进行保密处理,确保数据的安全性和机密性。
航片的立体观察、量测与野外判读实验指导书

航片的立体观察、量测与野外判读实验指导书利用航空摄影像片制作地形图是获得国家基本地形图的主要方法之一。
在航测像片上通过分像设备观测立体像对得到立体视觉模型的过程称为立体观测。
在航摄像片上,根据构象的规律与特点,识别地面上相应地物的性质、位置、大小、形状,称为像片判读。
通过本实验可使同学们初步了解航摄像片的基本知识及航测成图的方法。
一、实验性质验证性实验,实验时数可安排为2~3学时。
二、目的和要求⑴了解用航摄像片进行立体观察的条件,并能用立体镜进行正、反立体观察。
⑵了解视差杆的构造,掌握用视差杆量测视差较的方法。
⑶了解地物成像规律和特征,能在所摄区域对照实地辨认出典型的地物和地貌。
三、仪器和工具⑴反光立体镜(或简易立体镜)1个、立体像对2张、视差杆1个、放大镜1个、相片夹1个、图纸1张、红色铅笔1只。
⑵自备:大头针。
四、方法步骤⑴实验指导教师演示、讲解实验全过程。
⑵在一对航片上标出像片主点,并互相转刺,用铅笔连线得像片基线。
⑶在一张50 cm×25 cm图纸上画一直线,然后将左、右像片放在上面,使影像区重叠部分向内,像片基线与图上直线重合,移动两像片,使其主点相距约260 mm。
⑷在像对上方安置立体镜。
移动立体镜,使眼基线与像片基线平行。
⑸通过目镜观察像对,调整左、右像片间距,使双眼同时凝视影像,影像重合得正立体效应(将左、右像片位置互换,重叠区向外,同法得反立体效应。
将左、右像片在原来位置上各自旋转90º,两像片基线互相平行,并与眼基线垂直,得零立体效应)。
⑹观察视差杆分划值的刻划,在视差杆上进行读数练习,掌握视差杆的使用方法。
⑺在正立体效应下,用视差杆对左、右像片的若干个同名像点进行量测,读至0.01 mm,得左、右视差(P L,P R)。
⑻以已知航高的某点为起始点,计算它与各同名像点的左、右视差较 P,计算各点与已知点的高差及各点高程。
⑼在室内立体观察的基础上,初步确定判读路线与判读的重点地物。
Inpho软件作业指导

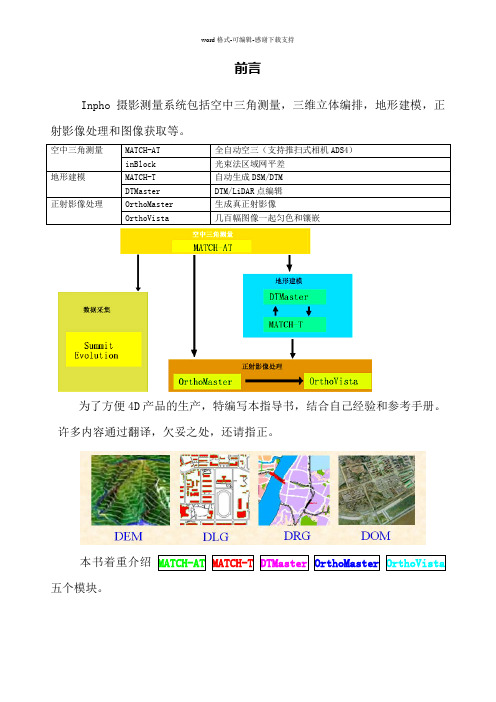
前言Inpho 摄影测量系统包括空中三角测量,三维立体编排,地形建模,正射影像处理和图像获取等。
空中三角测量MATCH-AT 全自动空三(支持推扫式相机ADS4)inBlock 光束法区域网平差地形建模MATCH-T 自动生成DSM/DTMDTMaster DTM/LiDAR点编辑正射影像处理OrthoMaster 生成真正射影像OrthoVista 几百幅图像一起匀色和镶嵌为了方便4D产品的生产,特编写本指导书,结合自己经验和参考手册。
许多内容通过翻译,欠妥之处,还请指正。
本书着重介绍MATCH-AT MATCH-T DTMaster OrthoMaster OrthoVista五个模块。
1.1.MATCH-AT 自动空三加密S S T T E E P P11新建工程,需要以下几个数据:数字影像相机文件外方位元素初始值外业控制资料(控制点成果和刺点片)工作内容•指定项目名称•载入近似中心(GPS、INS)•载入图像•确定单位,像素大小,照相机的名称和mount rotation,地形高度•自动设定块打开Match-AT,点击,下拉点击弹出对话窗①输入工程名和存储路径②导入航片初始坐标,即根据航摄索引图等初设概略航片坐标。
格式如下2750 388000 5000000 3000 /航片号 X坐标 Y坐标 Z坐标2749 389000 5000000 30002748 390000 5000000 3000# /航带分隔符2779 360000 4997000 30002780 361000 4997000 30002781 362000 4997000 3000#…………#如果是GPS辅助摄影,按# Strip 1759 539286.802 335214.655 1774.851 -1.8738 -0.3952 -3.4960760 539839.899 335206.408 1782.623 -1.5935 -0.3668 -3.4721761 540439.471 335192.804 1783.540 0.2288 0.8253 -3.7421# Strip 2... ... ...顺序导入,航带之间用“#”隔开。
基于无人机倾斜摄影测量三维建模及精度评价
measurement control points. The results are as follows the maximum errors in the x y and z directions are 2 5 cm 1 5 cm
and 5cm respectively and the maximum and minimum errors in the plane are 2 9 cm and 0 3 cm respectively. The above
基金项目: 广西科技计划项目( 桂科 AD19110107) ꎻ 广西自然科
新的发展方向ꎮ 传统的航空摄影测量虽能大范围获
(2019010702011314) ꎻ 武汉大学地球空间环境与大地测量教育部重
取地面三维数据ꎬ 但仅能得到物体的空间坐标和顶
目(41604019)
面信息ꎬ 不能获取目标完整的侧面纹理信息ꎬ 由此
research area and a 3D model of Zhuoer Gymnasium is constructed by using Context Capture to process and analyze the images
of unmanned aerial vehicle. The accuracy of three ̄dimensional model is evaluated and analyzed by using the coordinates of field
1. College of Geomatics and Geoinformation Guilin University of Technology Guilin 541006 Guangxi China
使用航空摄影测绘技术进行三维建模的详细步骤

使用航空摄影测绘技术进行三维建模的详细步骤使用航天摄影测绘技术进行三维建模的详细步骤引言:航天摄影测绘技术是现代测绘科学中的一项重要技术,它通过航空摄影系统获取的大量影像和数据,可以进行三维建模,并在许多领域发挥重要作用。
本文将详细介绍使用航天摄影测绘技术进行三维建模的步骤。
第一步:航线规划在进行航天摄影测绘任务之前,需要对目标区域进行航线规划。
航线规划的目的是确保航空摄影系统能够全面、高效地获取影像数据。
规划航线时,需要考虑目标区域的地形、自然条件以及安全要求,并合理安排摄影点的位置和间距。
第二步:航空摄影在航线规划完成后,航空摄影作为三维建模的重要数据来源进行拍摄。
航空摄影可以使用飞机、无人机等载具进行,通过搭载高分辨率的相机设备,获取目标区域的影像数据。
在航空摄影过程中,需要确保相机设备的稳定性,以获得高质量的影像数据。
第三步:数据处理航天摄影测绘技术获取的影像数据需要进行后续的数据处理工作。
首先,需要进行影像匀化和几何校正,以消除影像中的畸变和误差。
然后,进行影像配准,将多个航空摄影获取的影像数据进行空间对齐,保证后续的三维建模工作的准确性。
第四步:特征提取进行三维建模之前,需要从大量的影像数据中提取出目标物体的特征信息。
特征提取可以通过计算机视觉算法进行,常见的方法包括边缘检测、角点检测和纹理分析等。
通过特征提取,可以得到目标物体在影像中的位置、大小和形状等信息。
第五步:三维重建在特征提取完成后,可以开始进行三维重建工作。
三维重建包括场景的点云生成和三维模型的构建。
点云生成是将特征点通过三角测量或者立体匹配等方法,转化为具有空间位置信息的点云数据。
然后,通过点云数据,可以进行三维模型的构建,包括曲面重建和纹理映射等操作。
第六步:数据融合和质量评估在三维建模阶段,可能会获取到不同类型、分辨率和精度的数据。
此时,需要对这些数据进行融合,以获得更加完整和准确的三维模型。
数据融合可以通过点云配准、纹理融合等方法进行。
Inpho软件作业指导
前言Inpho 摄影测量系统包括空中三角测量,三维立体编排,地形建模,正射影像处理和图像获取等。
空中三角测量MATCH-AT 全自动空三(支持推扫式相机ADS4)inBlock 光束法区域网平差地形建模MATCH-T 自动生成DSM/DTMDTMaster DTM/LiDAR点编辑正射影像处理OrthoMaster 生成真正射影像OrthoVista 几百幅图像一起匀色和镶嵌为了方便4D产品的生产,特编写本指导书,结合自己经验和参考手册。
许多内容通过翻译,欠妥之处,还请指正。
本书着重介绍MATCH-AT MATCH-T DTMaster OrthoMaster OrthoVista 五个模块。
1.1.MATCH-AT 自动空三加密S S T T E E P P11新建工程,需要以下几个数据:数字影像相机文件外方位元素初始值外业控制资料(控制点成果和刺点片)工作内容•指定项目名称•载入近似中心(GPS、INS)•载入图像•确定单位,像素大小,照相机的名称和mount rotation,地形高度•自动设定块打开Match-AT,点击,下拉点击弹出对话窗①输入工程名和存储路径②导入航片初始坐标,即根据航摄索引图等初设概略航片坐标。
格式如下2750 388000 5000000 3000 /航片号 X坐标 Y坐标 Z坐标2749 389000 5000000 30002748 390000 5000000 3000# /航带分隔符2779 360000 4997000 30002780 361000 4997000 30002781 362000 4997000 3000#…………#如果是GPS辅助摄影,按# Strip 1759 539286.802 335214.655 1774.851 -1.8738 -0.3952 -3.4960760 539839.899 335206.408 1782.623 -1.5935 -0.3668 -3.4721761 540439.471 335192.804 1783.540 0.2288 0.8253 -3.7421# Strip 2... ... ...顺序导入,航带之间用“#”隔开。
测绘航空摄影作业指导书

测绘航空摄影作业指导书
1. 航空摄影基础知识,介绍航空摄影的基本概念、原理、技术和发展历史,包括摄影机、摄影机支架、航空摄影测量仪器等设备的基本原理和使用方法。
2. 摄影测量学原理,详细介绍摄影测量学的基本原理,包括相对定向、绝对定向、立体像对的建立和使用等内容,以及摄影测量学在测绘航空摄影中的应用。
3. 航空摄影作业流程,包括航空摄影作业前的准备工作、飞行计划编制、飞行器材的选择和配置、飞行员和摄影测量人员的配备等内容。
4. 航空摄影作业安全规范,介绍航空摄影作业中的安全规范和操作规程,包括飞行安全、设备操作安全、数据处理安全等方面的规定和要求。
5. 航空摄影数据处理,介绍航空摄影数据的处理方法,包括航空摄影图像的获取、整理、处理和制图等技术。
6. 航空摄影作业质量控制,介绍航空摄影作业中的质量控制方法和标准,包括航空摄影产品的质量要求和评定标准等内容。
7. 实例分析和案例展示,通过实际的航空摄影作业案例,分析和展示不同情况下的作业流程、技术难点和解决方法,以及作业效果和成果展示。
总的来说,测绘航空摄影作业指导书是一本系统、全面、权威的专业书籍,旨在为从事或学习测绘航空摄影的人员提供必要的理论知识和实践指导,以确保航空摄影作业的安全、高效和质量。
利用无人机进行航空摄影测量的实际操作指南
利用无人机进行航空摄影测量的实际操作指南随着科技的不断发展,无人机作为一种先进的航空工具,被广泛应用于各个领域。
其中,利用无人机进行航空摄影测量成为一项重要的技术。
本文将为大家提供一份实际操作指南,帮助初学者快速掌握无人机航空摄影测量的技巧。
一、前期准备在进行无人机航拍之前,我们首先需要做一些前期准备工作。
首先,了解飞行区域的气象条件非常重要。
风速、湿度、温度等因素会对无人机的飞行产生一定的影响,所以在安排航拍任务之前务必查询气象预报和飞行限制。
其次,选择合适的摄影设备也至关重要。
目前市面上有各种各样的无人机和相机组合,我们需根据具体的拍摄需求进行选择。
有些航拍摄影需要高分辨率的相机,而另一些则需要嵌入式测绘相机。
此外,还需要准备一些必备的附件,如备用电池、存储卡、航拍地图等。
二、任务规划在正式进行航空摄影测量之前,我们需要进行任务规划。
首先,明确航拍的目的,确定所需的地理信息类型,并进行合理的任务区域分割。
此外,需要了解航线规划和地形特征,在海拔、周围环境、地物覆盖等方面进行分析,以充分准备和避免可能的风险。
针对航拍任务区域的地形特征,需要确定高程参考系统,选择合适的坐标系和地面控制点。
为了保证成果的准确性和精度,建议使用全球卫星定位系统(GNSS)进行测量。
此外,如果需要更高的精度,还可以采用地面控制点进行精确定位。
三、飞行操作在实际的飞行操作中,需要注意一些关键事项。
首先,确保无人机处于良好的工作状态,包括电池电量、传感器的功能和连接状态等。
在起飞前,进行预飞检查,确保所有部件齐全且正常工作。
其次,根据任务规划,进行航点规划和航线编制。
在航线规划中,需要考虑地物覆盖情况、避开禁飞区域和限制区域,同时保证拍摄重叠度和航高的合理性。
飞行过程中,需要根据地形变化及时调整飞行高度和航向,确保所拍照片的覆盖范围完整。
在飞行操作过程中,需要时刻监控无人机的动态和参数变化。
通过遥控器或者地面站,可以实时获取飞行高度、速度、姿态等信息。
无人机航拍摄影与三维建模作业指导书
无人机航拍摄影与三维建模作业指导书第1章无人机航拍摄影基础 (4)1.1 无人机概述 (4)1.1.1 无人机类型 (4)1.1.2 功能指标 (4)1.1.3 我国相关法规 (5)1.2 航拍摄影设备选择 (5)1.2.1 无人机选择 (5)1.2.2 相机选择 (5)1.2.3 云台选择 (5)1.2.4 镜头选择 (5)1.3 航拍摄影技巧 (6)1.3.1 飞行路径规划 (6)1.3.2 拍摄角度选择 (6)1.3.3 相机参数设置 (6)第2章三维建模基本原理 (6)2.1 三维建模概念 (6)2.2 三维建模方法 (6)2.3 三维建模软件介绍 (7)第3章无人机航拍影像数据获取 (7)3.1 航线规划 (7)3.1.1 航线设计原则 (7)3.1.2 航线设计方法 (8)3.2 影像数据采集 (8)3.2.1 飞行前准备 (8)3.2.2 飞行过程控制 (8)3.2.3 数据传输与存储 (8)3.3 影像质量评估 (8)3.3.1 影像质量评价指标 (8)3.3.2 影像质量评估方法 (9)第4章影像预处理 (9)4.1 影像校正 (9)4.1.1 畸变校正 (9)4.1.2 地理校正 (9)4.2 影像配准 (9)4.2.1 特征提取 (9)4.2.2 特征匹配 (10)4.2.3 变换模型 (10)4.2.4 配准评估 (10)4.3 影像增强 (10)4.3.1 亮度调整 (10)4.3.2 对比度增强 (10)4.3.4 颜色校正 (10)第5章三维建模流程 (10)5.1 数据准备 (10)5.1.1 数据收集 (11)5.1.2 数据筛选 (11)5.1.3 数据预处理 (11)5.2 三维重建 (11)5.2.1 特征提取 (11)5.2.2 相机标定 (11)5.2.3 空间坐标计算 (11)5.2.4 网格 (11)5.2.5 纹理映射 (11)5.3 精度评估 (11)5.3.1 控制点精度评估 (11)5.3.2 重采样精度评估 (12)5.3.3 对比分析 (12)5.3.4 用户评估 (12)第6章三维模型优化与修饰 (12)6.1 模型优化 (12)6.1.1 优化目的 (12)6.1.2 优化方法 (12)6.2 模型纹理映射 (12)6.2.1 纹理映射原理 (12)6.2.2 纹理映射方法 (12)6.3 模型修饰与渲染 (13)6.3.1 模型修饰 (13)6.3.2 渲染输出 (13)第7章无人机航拍摄影在三维建模中的应用 (13)7.1 建筑物三维建模 (13)7.1.1 数据采集 (13)7.1.2 数据处理 (13)7.1.3 应用实例 (13)7.2 道路及地形三维建模 (13)7.2.1 数据采集 (14)7.2.2 数据处理 (14)7.2.3 应用实例 (14)7.3 其他领域应用 (14)7.3.1 水利工程 (14)7.3.2 矿产资源 (14)7.3.3 环境保护 (14)7.3.4 文化遗产保护 (14)7.3.5 农林业 (14)第8章三维模型可视化与交互 (14)8.1.1 三维模型数据结构 (15)8.1.2 三维模型渲染方法 (15)8.1.3 纹理映射与材质 (15)8.2 三维模型交互操作 (15)8.2.1 交互方式概述 (15)8.2.2 旋转、平移和缩放 (15)8.2.3 剖切与测量 (15)8.3 虚拟现实与增强现实应用 (15)8.3.1 虚拟现实技术概述 (15)8.3.2 增强现实技术概述 (15)8.3.3 三维模型在虚拟现实与增强现实中的应用 (15)第9章无人机航拍摄影与三维建模的安全与法规 (16)9.1 无人机飞行安全 (16)9.1.1 飞行前准备 (16)9.1.2 飞行操作 (16)9.1.3 应急处理 (16)9.2 数据安全与隐私保护 (16)9.2.1 数据存储与传输 (16)9.2.2 数据使用与管理 (16)9.3 相关法规与政策 (17)9.3.1 法律法规 (17)9.3.2 政策文件 (17)第10章无人机航拍摄影与三维建模实践案例 (17)10.1 案例一:城市建筑群三维建模 (17)10.1.1 无人机航拍摄影 (17)10.1.2 数据预处理 (17)10.1.3 三维建模 (17)10.1.4 模型质量控制 (18)10.2 案例二:考古遗址三维建模 (18)10.2.1 无人机航拍摄影 (18)10.2.2 数据预处理 (18)10.2.3 三维建模 (18)10.2.4 模型质量控制 (18)10.3 案例三:自然灾害监测与评估 (18)10.3.1 无人机航拍摄影 (18)10.3.2 数据预处理 (18)10.3.3 灾害评估 (18)10.3.4 三维模型应用 (18)10.4 案例四:大型工程三维监测与管理 (19)10.4.1 无人机航拍摄影 (19)10.4.2 数据预处理 (19)10.4.3 三维建模 (19)10.4.4 三维模型应用 (19)第1章无人机航拍摄影基础1.1 无人机概述无人机(Unmanned Aerial Vehicle,UAV)是一种不需要载人即可远程或自主控制飞行的航空器。
航空摄影测量的三维模型生成与应用
航空摄影测量的三维模型生成与应用航空摄影测量是一种借助于航空器进行地理环境数据采集和测量的技术,它能够生成高精度的三维模型,具有广泛的应用价值。
本文将探讨航空摄影测量三维模型生成的原理和流程,并介绍其在城市规划、地质勘探和文化遗产保护等领域的应用。
航空摄影测量的三维模型生成是通过将航空摄影测量获取的影像数据进行处理,提取地物空间坐标信息,进而生成精确的三维模型。
其核心技术包括数字影像处理、摄影测量理论和三维重建算法等。
数字影像处理是航空摄影测量的第一步,主要涉及图像预处理、几何校正和图像配准等过程。
图像预处理包括去噪、去辐射校正和图像增强等操作,能够提高图像质量。
几何校正主要是对图像进行去畸变、投影变换和栅格配准等操作,以提高图像的空间几何精度和定位精度。
图像配准则是通过特征匹配和数据配准算法,将多张影像进行配准,以消除影像之间的位置差异,为后续的数据处理做准备。
摄影测量理论是航空摄影测量的基础,通过测量仪器和测量原理,确定影像上物体的空间坐标。
其中比较重要的理论包括像片测量、地面控制测量和内外方位元素计算等。
像片测量是根据像片上的特征点,通过基于观测方程的方法,确定其地面投影的坐标。
地面控制测量则是通过测量物体在地面的坐标,将像片测量结果与地面坐标体系相联系。
内外方位元素则是描述影像与地面相对位置关系的参数,包括相机内参数、相机姿态元素和绝对定向元素等。
三维重建算法是航空摄影测量的关键技术,通过对影像数据进行三维点云匹配、三维网格建模和纹理贴图等操作,生成真实感强、准确度高的三维模型。
三维点云匹配是通过对多张影像进行多视角重建,提取特征点并进行匹配,生成初始的三维点云。
三维网格建模则是将三维点云转化为连续的三维网格,以表示地物的表面形状。
纹理贴图则是将影像数据投影到三维模型上,使得模型表面具有真实的纹理信息。
航空摄影测量的三维模型生成在城市规划中有着广泛的应用。
通过对城市的航空影像进行处理和分析,可以获取城市地物的准确信息,提供决策依据。
如何使用航空摄影测量技术进行3D建模
如何使用航空摄影测量技术进行3D建模随着科技的不断发展,航空摄影测量技术正逐渐成为3D建模领域的重要工具。
通过航空摄影测量技术,我们能够快速、精确地获取地表的三维信息,为城市规划、土地利用和工程建设提供重要的数据支持。
本文将探讨如何使用航空摄影测量技术进行3D建模。
一、航空摄影测量技术概述航空摄影测量技术是一种通过航空器搭载特定的摄影设备对地面进行影像数据采集和处理的技术。
通过将不同位置和角度的影像进行处理,可以获取地表的三维坐标信息,并生成高精度的数字地图和三维模型。
常见的航空摄影测量技术包括航空相机摄影测量、激光雷达测量、无人机摄影测量等。
二、航空相机摄影测量技术航空相机是航空摄影测量技术的核心设备之一。
航空相机通常由多个摄像机单元组成,可以在航空器上进行偏斜摄影,并通过将不同角度的影像进行重叠辅助测量。
这种技术可以通过三角测量原理计算出地物的准确位置和高度,从而实现三维建模。
三、航空摄影测量的数据处理在采集到航空摄影数据后,还需要进行一系列的数据处理才能生成三维模型。
首先,需要对航空影像进行几何校正和辐射校正,以纠正拍摄时的畸变和光照变化。
然后,需要进行影像匹配,即将不同角度的影像进行重叠配准,形成连续的数据集。
最后,通过三角测量和数字化方法,计算地物的准确位置和高度,并生成三维模型。
四、航空摄影测量的应用航空摄影测量技术在城市规划、土地利用和工程建设中有广泛的应用。
在城市规划方面,可以通过航空摄影测量技术获取城市的实际地貌和建筑物信息,帮助规划师进行城市设计和土地分配。
在土地利用方面,可以通过航空摄影测量技术对土地进行分类和评估,为农业和林业生产提供决策依据。
在工程建设方面,可以通过航空摄影测量技术对工程项目进行监测和评估,提高施工效率和质量。
五、航空摄影测量技术的挑战与发展虽然航空摄影测量技术在3D建模领域有着广泛的应用潜力,但也面临一些挑战。
首先,航空摄影测量技术需要大量的数据处理和分析工作,对计算机性能和算法要求较高。
使用航空摄影测量技术进行三维地图的绘制方法
使用航空摄影测量技术进行三维地图的绘制方法导语:随着科技的不断发展,航空摄影测量技术越来越广泛地应用于地理测绘、土地规划与交通建设等领域。
使用航空摄影测量技术进行三维地图的绘制,能够提供精确高效的地理空间信息,为人们的生活带来便利。
本文将介绍利用航空摄影测量技术绘制三维地图的方法。
一、航空摄影测量技术的原理与应用航空摄影测量技术是通过航空摄影的方式获取地表物体的影像信息,并通过摄影测量的方法计算出物体的空间坐标。
利用该技术可以获取大范围、高精度的地理空间信息,为地图绘制提供了重要的数据支持。
此外,航空摄影测量技术还广泛应用于城市规划、环境监测以及农业资源调查等领域。
二、航空摄影测量技术的数据采集1. 飞行计划与航拍器材选择:在进行航空摄影测量之前,首先需要制定详尽的飞行计划,并选择合适的航拍器材。
根据地理区域的大小和复杂程度,选择合适的航拍器材,包括航空相机、摄影镜头、航空无人机等。
2. 摄影测量基准点建立:在进行航空摄影测量之前,需建立摄影测量基准点。
基准点是指在大地坐标系下已知坐标的地物,可以用来精确校正航摄影像的几何位置。
通过基准点的建立,可以提高地图绘制的精度。
3. 航空摄影测量数据采集:航空摄影测量数据的采集是利用航空相机进行航拍,获取地表物体的影像信息。
在航空摄影过程中,需要控制飞机的高度、速度和飞行航迹等参数。
通过合理设置参数,可以获得清晰、连续的影像序列。
三、航空摄影测量数据处理1. 影像预处理:航空摄影测量数据的预处理一般包括影像质量控制、几何纠正、辐射纠正等步骤。
在影像质量控制中,可以通过航空相机的影像质量评估指标,如分辨率、噪声、畸变等,对影像进行质量评估。
几何纠正主要是将航拍影像的几何形态与实地一一对应,纠正由于姿态变化引起的像点偏差,提高影像的几何精度。
辐射纠正是根据影像的几何形态和光谱响应特性,对影像进行亮度、色调等校正。
2. 影像的配准与匹配:配准是将航空摄影影像与已有的基准图像进行对比,并通过准确的匹配和定位,将影像与地理坐标相对应。
使用航空摄影测绘技术进行三维地形模拟的实践指南

使用航空摄影测绘技术进行三维地形模拟的实践指南近年来,随着航空摄影测绘技术的快速发展,三维地形模拟成为地理信息领域的重要应用之一。
通过航空摄影测绘技术,我们可以获取高精度的地理数据,并进一步实现三维地形模拟。
本文将介绍使用航空摄影测绘技术进行三维地形模拟的实践指南,帮助读者了解该技术的基本原理和操作流程,以及如何应用于实际场景。
1. 航空摄影测绘技术的基本原理航空摄影测绘技术是利用航空平台,如无人机、飞机、卫星等,通过摄影测量方法获取地表特征的技术。
其基本原理是利用航空摄影机或者卫星传感器获取地面的影像数据,通过测量这些影像数据获取地面上物体的空间坐标信息。
通过对这些三维坐标信息的处理和分析,我们可以实现三维地形模拟。
2. 使用航空摄影测绘技术进行三维地形模拟的操作流程首先,进行航空摄影任务计划。
根据需要进行地形模拟的区域,确定合适的航空平台和数据采集设备。
制定飞行计划,包括航线、高度、速度等参数。
同时,根据地形特点和实际需求,确定相机或者传感器的设置参数,如焦距、曝光时间等。
其次,进行航空摄影任务执行。
按照计划,在合适的天气条件下,运行航空平台进行数据采集。
在航空平台上安装好相机或者传感器,并进行校准。
在飞行过程中,根据计划的航线和高度进行数据采集。
然后,进行航空影像处理。
在数据采集完成后,将采集到的影像数据进行处理。
首先,对影像进行预处理,包括去除畸变、调整亮度对比度等。
然后,进行影像匹配,通过找到对应的特征点,确定影像间的对应关系。
最后,进行航空三角测量,根据影像特征点的三维坐标信息,计算地面上物体的空间坐标。
最后,进行地形模拟。
在获得了地面物体的空间坐标信息后,可以利用地理信息系统软件进行地形模拟。
根据需要,可以选择不同的模型和算法进行模拟。
通过将三维坐标信息转化为可视化模型,我们可以实现三维地形模拟,并根据需求进行进一步的数据分析和应用。
3. 使用航空摄影测绘技术进行三维地形模拟的应用场景航空摄影测绘技术的三维地形模拟在各个领域都有广泛的应用。
如何应用航空摄影测量技术进行三维建模

如何应用航空摄影测量技术进行三维建模摘要:航空摄影测量技术在三维建模领域具有广泛应用。
本文将介绍航空摄影测量技术的基本原理和流程,并结合实际案例探讨如何应用该技术进行三维建模。
通过使用航空摄影测量技术,可以实现高效、准确的三维建模,为相关领域的研究和应用带来巨大的潜力。
一、航空摄影测量技术的基本原理航空摄影测量技术是通过从飞机、无人机等航空器上采集图像,并利用这些图像进行测量和分析,来获取地面物体的形状、大小、位置等信息的技术。
其基本原理包括影像获取、摄影测量、摄影定位和影像处理等步骤。
影像获取是通过航空器载荷系统(相机)拍摄地面影像,通常使用航空相机、无人机相机等设备。
摄影测量是根据影像对地面物体的位置关系进行测量分析,推导出物体的形状、位置、大小等信息。
摄影定位是确定影像在地面上的具体位置,通常使用全球导航卫星系统(GNSS)和惯性导航系统(INS)来实现。
影像处理是对采集的原始影像进行校正、配准、拼接等处理,以获取准确的三维建模数据。
二、航空摄影测量技术的应用场景航空摄影测量技术在三维建模领域的应用非常广泛。
例如,城市规划部门可以利用该技术进行城市地貌、建筑物、道路等的三维建模,从而辅助城市规划和管理。
土地资源管理部门可以利用该技术对土地利用、土地覆盖等进行三维建模,提供科学依据。
环境保护领域可以利用该技术对自然环境、生态系统等进行三维建模,为生态保护和环境监测提供数据支持。
此外,航空摄影测量技术还可以应用于农业、医疗、文化遗产保护等领域。
三、如何应用航空摄影测量技术进行三维建模(1)数据采集和处理首先,需要选择适合的航空器和载荷设备进行数据采集。
通常情况下,使用无人机搭载相机进行数据采集是比较常见的选择。
数据采集时需要注意采集区域的遮挡情况、飞行高度和航线设置等因素,以保证采集到的影像质量和覆盖面积。
接下来,需要对采集的影像进行处理,包括校正、配准和拼接等步骤。
校正是指对影像进行纠正,消除畸变等。
使用航空摄影测量技术进行三维建模
使用航空摄影测量技术进行三维建模随着科技的不断发展和应用的深入,航空摄影测量技术在三维建模领域的应用也变得越来越广泛。
通过使用航空摄影测量技术,我们可以高效准确地获取地表数据,并利用这些数据来生成真实的、高质量的三维模型。
本文将介绍航空摄影测量技术的原理和应用,并讨论其在建筑、城市规划和地质勘探等领域的意义和潜力。
航空摄影测量技术是通过航空摄影测量仪器对地面进行采集和记录,然后运用测绘学和计算机图像处理技术对这些数据进行处理和分析,从而生成三维模型的一种技术手段。
这项技术的核心是利用飞机或无人机搭载的相机,通过连续拍摄地面或建筑物的影像,然后根据影像之间的重叠情况和位置信息,通过测量和计算的方法,获得地表的三维坐标和形状数据。
使用航空摄影测量技术进行三维建模有多种优势。
首先,通过使用航空摄影测量技术,我们可以快速且准确地获取大范围地表数据。
相比传统的测量方法,传统测量需要投入大量的人力物力,而且速度较慢。
而航空摄影测量技术可以在较短的时间内覆盖大面积的地理区域,大大提高了测量的效率。
其次,航空摄影测量技术可以提供高分辨率的影像。
通过将多个相机的影像进行融合,可以获取更加清晰和详细的地表信息,有助于生成真实的、高质量的三维模型。
此外,航空摄影测量技术还可以实现对地表形状和变化的监测和分析,对于城市规划、地质勘探等领域非常有用。
航空摄影测量技术在建筑领域的应用尤为广泛。
通过使用航空摄影测量技术,可以对大型建筑物进行快速、精确的测量和建模。
这对于建筑物的设计、改造和维护具有很大的意义。
例如,在进行城市规划时,航空摄影测量技术可以提供关于城市空间布局和建筑物高度的数据,有助于规划者进行城市的合理布局和设计。
在建筑改造或修缮时,通过对建筑物进行三维建模,可以提前进行非破坏性测试,避免了破坏性检测过程对建筑物的影响。
另外,航空摄影测量技术还可以用于建筑物的监测和评估,及时发现可能存在的结构问题,提前做好维修和保养工作。
测绘工程技术专业航空摄影测量实操指南

测绘工程技术专业航空摄影测量实操指南航空摄影测量是一种通过航空器对地面进行摄影测量,获得高精度的地形、地貌和地物信息的测绘技术。
在测绘工程技术专业中,学习航空摄影测量不仅需要理解相关理论知识,更需要掌握实操技巧。
本指南旨在为测绘工程技术专业的学生提供一份航空摄影测量实操指南,以帮助他们在实际操作中更加熟练和准确。
一、准备工作1. 器材准备在进行航空摄影测量实操前,需要准备好以下器材:- 数字摄像机:选择一款分辨率高、色彩还原度好的数码相机进行测量。
- 导航仪:用于定位和航线规划,选用功能齐全、易于携带的导航仪。
- 地面控制点标志物:在测量范围内设置地面控制点,标志物应具备较强的辨识度和稳定性。
2. 实地考察在进行摄影测量前,对测区进行实地考察是十分必要的。
实地考察主要包括以下内容:- 地形地貌:熟悉测区内的地形地貌特征,并了解其变化情况。
- 障碍物:查明潜在的航拍障碍物,以便进行规避和飞行安全控制。
- 控制点布设:根据实际需要,在测区内合理布设地面控制点。
二、飞行计划与航线规划1. 飞行计划在进行航空摄影测量时,需要制定详细的飞行计划。
飞行计划应包括以下内容:- 起飞时间:根据天气状况和光照条件选择适宜的起飞时间。
- 飞行高度:根据测区特点和测量要求确定合理的飞行高度。
- 飞行速度:根据航空器的性能和航测要求设置合理的飞行速度。
- 飞行路线:依据航空器的性能和航测要求规划合理的飞行路线。
2. 航线规划航线规划是指在测区内规划飞行航线,以保证航空摄影测量的全覆盖和重叠度要求。
航线规划需要注意以下几点:- 覆盖率:根据航测精度要求,确定航线的重叠度,通常要求前后重叠度大于60%,侧向重叠度大于20%。
- 航带宽度:根据航拍器的分辨率和传感器的工作范围,确定航带的宽度。
- 航段长度:根据航拍器的续航能力和测区特点,确定每个航段的长度。
三、航空摄影测量实操步骤1. 航空摄影测量前准备- 确认天气状况,并根据天气状况和光照条件选择合适的航测时间。
基于无人机倾斜摄影测量技术的三维建模
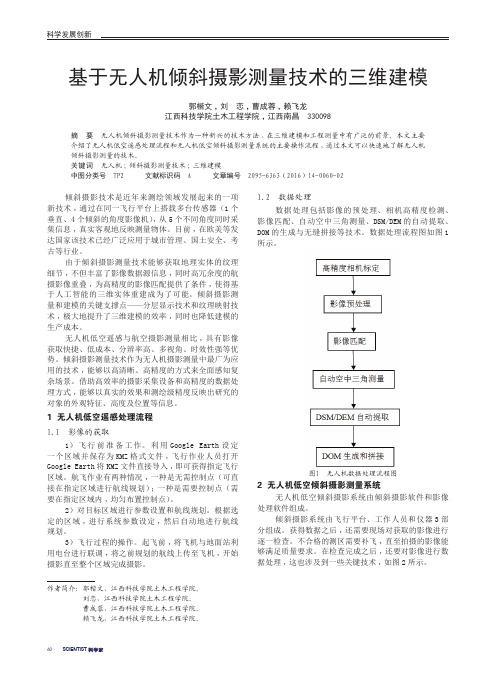
60基于无人机倾斜摄影测量技术的三维建模郭楷文,刘 恋,曹成蓉,赖飞龙江西科技学院土木工程学院,江西南昌 330098摘 要 无人机倾斜摄影测量技术作为一种新兴的技术方法,在三维建模和工程测量中有广泛的前景。
本文主要介绍了无人机低空遥感处理流程和无人机低空倾斜摄影测量系统的主要操作流程,通过本文可以快速地了解无人机倾斜摄影测量的技术。
关键词 无人机;倾斜摄影测量技术;三维建模中图分类号 TP2 文献标识码 A 文章编号 2095-6363(2016)14-0060-02倾斜摄影技术是近年来测绘领域发展起来的一项新技术,通过在同一飞行平台上搭载多台传感器(1个垂直、4个倾斜的角度影像机),从5个不同角度同时采集信息,真实客观地反映测量物体。
目前,在欧美等发达国家该技术已经广泛应用于城市管理、国土安全、考古等行业。
由于倾斜摄影测量技术能够获取地理实体的纹理细节,不但丰富了影像数据源信息,同时高冗余度的航摄影像重叠,为高精度的影像匹配提供了条件,使得基于人工智能的三维实体重建成为了可能。
倾斜摄影测量和建模的关键支撑点——分层显示技术和纹理映射技术,极大地提升了三维建模的效率,同时也降低建模的生产成本。
无人机低空遥感与航空摄影测量相比,具有影像获取快捷、低成本、分辨率高、多视角、时效性强等优势。
倾斜摄影测量技术作为无人机摄影测量中最广为应用的技术,能够以高清晰、高精度的方式来全面感知复杂场景。
借助高效率的摄影采集设备和高精度的数据处理方式,能够以真实的效果和测绘级精度反映出研究的对象的外观特征、高度及位置等信息。
1 无人机低空遥感处理流程1.1 影像的获取1)飞行前准备工作。
利用Google Earth设定一个区域并保存为KMZ格式文件,飞行作业人员打开Google Earth将KMZ文件直接导入,即可获得指定飞行区域。
航飞作业有两种情况,一种是无需控制点(可直接在指定区域进行航线规划);一种是需要控制点(需要在指定区域内,均匀布置控制点)。
基于航空摄影测量三维建模作业指导手册

基于航空摄影测量的三维建模作业指导手册武汉适普软件有限公司前言随着社会的进步,城市发展的需求,三维城市建模数据直接给城市规划、城市防恐系统、地质灾害、城市商业管理、数字城市等提供了基础三维数据,三维城市的建立能够全方位地、直观地给人们提供有关城市的各种具有真实感的场景信息。
利用适普公司特有的三维建模制作方案和甲方所提出需求,综合制定出三维生产方案,提供给客户满意的成果。
就以上问题规化思路提出多种解决办法供客户参考。
目录一、引用标准 (2)二、通用配置 (2)(一)软件准备 (2)(二)硬件环境及数据准备 (2)(三)比例尺设置 (3)(四)数据准备 (4)(五)作业区的划分 (4)(六)V IRTUO Z O IGS快捷键设置 (4)三、工作流程 (6)(一)数据采集前准备 (6)(二)恢复测区、设置测区及模型参数 (7)四、基于立体采集特征线生成高精度 DEM (12)(一)DEM格网设置 (12)(二)矢量数据分层要求 (13)(三)特征线采集要求 (13)(四)特征线接边检查 (13)(五)DEM生成 (14)(六)DEM拼接、裁切 (16)五、建筑模型立体采集 (17)(一)建筑物表现标准 (17)(二)建筑物采集要求 (18)(三)采集案例 (19)六、使用DIBUD自动建模软件 (22)七、常见问题及解决方法 (25)一、 引用标准✧《基础地理信息要素分类与代码》GB/T13923✧《地球空间数据交换格式》GB/T17798✧《数字测绘成果质量检查与验收》GB/T18316✧《全球定位系统(GPS)测量规范》GB/T18314✧《国家基本比例尺地图图式第1部分:1:500 1:1000 1:2000地形图图式》GB/T20257.1✧《基础地理信息要素数据字典第1部分:1:500 1:1000 1:2000基础地理信息要素数据字典》GB/T20258.1✧《基础地理信息数字产品数据文件命名规则》CH/T1005✧《基础地理信息数字产品元数据》CH/T1007✧《基础地理信息数字成果1:500 1:1000 1:2000数字高程模型》CH/T9008.2✧《低空数字航空摄影测量外业规范》CH/Z3004✧《低空数字航空摄影规范》CH/Z3005✧《1:500 1:1000 1:2000地形图航空摄影规范》GB/T6962—2005✧《1:5000 1:10000 1:25000 1:50000 1:100000地形图航空摄影规范》GB/T 15661—2008二、 通用配置(一)软件准备VirtuoZo全数字摄影测量系统;DiBud建筑物三维建模系统(二)硬件环境及数据准备标准航测内业硬件设备,其中以NVIDIA Quadro 4000显卡为例,显卡驱动安装后,进入NVIDIA控制面板,参考如下显示参数。
摄影测量3d景致飞行的操作流程及注意事项
摄影测量3d景致飞行的操作流程及注意事项下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor.I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!摄影测量3D景致飞行操作流程与注意事项详解摄影测量3D景致飞行是一种利用无人机进行高空拍摄,通过专业软件处理生成三维模型的技术。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于航空摄影测量的三维建模作业指导手册武汉适普软件有限公司前言随着社会的进步,城市发展的需求,三维城市建模数据直接给城市规划、城市防恐系统、地质灾害、城市商业管理、数字城市等提供了基础三维数据,三维城市的建立能够全方位地、直观地给人们提供有关城市的各种具有真实感的场景信息。
利用适普公司特有的三维建模制作方案和甲方所提出需求,综合制定出三维生产方案,提供给客户满意的成果。
就以上问题规化思路提出多种解决办法供客户参考。
目录一、引用标准 (2)二、通用配置 (2)(一)软件准备 (2)(二)硬件环境及数据准备 (2)(三)比例尺设置 (3)(四)数据准备 (4)(五)作业区的划分 (4)(六)V IRTUO Z O IGS快捷键设置 (4)三、工作流程 (6)(一)数据采集前准备 (6)(二)恢复测区、设置测区及模型参数 (7)四、基于立体采集特征线生成高精度 DEM (12)(一)DEM格网设置 (12)(二)矢量数据分层要求 (13)(三)特征线采集要求 (13)(四)特征线接边检查 (13)(五)DEM生成 (14)(六)DEM拼接、裁切 (16)五、建筑模型立体采集 (17)(一)建筑物表现标准 (17)(二)建筑物采集要求 (18)(三)采集案例 (19)六、使用DIBUD自动建模软件 (22)七、常见问题及解决方法 (25)一、 引用标准✧《基础地理信息要素分类与代码》GB/T13923✧《地球空间数据交换格式》GB/T17798✧《数字测绘成果质量检查与验收》GB/T18316✧《全球定位系统(GPS)测量规范》GB/T18314✧《国家基本比例尺地图图式第1部分:1:500 1:1000 1:2000地形图图式》GB/T20257.1✧《基础地理信息要素数据字典第1部分:1:500 1:1000 1:2000基础地理信息要素数据字典》GB/T20258.1✧《基础地理信息数字产品数据文件命名规则》CH/T1005✧《基础地理信息数字产品元数据》CH/T1007✧《基础地理信息数字成果1:500 1:1000 1:2000数字高程模型》CH/T9008.2✧《低空数字航空摄影测量外业规范》CH/Z3004✧《低空数字航空摄影规范》CH/Z3005✧《1:500 1:1000 1:2000地形图航空摄影规范》GB/T6962—2005✧《1:5000 1:10000 1:25000 1:50000 1:100000地形图航空摄影规范》GB/T 15661—2008二、 通用配置(一)软件准备VirtuoZo全数字摄影测量系统;DiBud建筑物三维建模系统(二)硬件环境及数据准备标准航测内业硬件设备,其中以NVIDIA Quadro 4000显卡为例,显卡驱动安装后,进入NVIDIA控制面板,参考如下显示参数。
图1(三)比例尺设置航摄比例尺一般按成图比例尺确定根据作业经验,航测成图一般为放大成图根据经验,航测成图一般为放大成图,放大倍率通常为4—6倍,这样即可保证成图精度,又可把测绘工作量减小到最小。
例如:城市1:500大比例尽地形图,摄影比例尺通常采用1:2500——1:3000。
航摄比例尺应根据不同摄区的地形特点,在确保测图精度的前提下,本着有利于缩短成图周期、降低成本、提高测绘综合效益的原则在表1的范围内选择。
成图比例尺航摄比例尺1:500 1:2000——1:30001:1000 1:4000——1:60001:2000 1:8000——1:120001:5000 1:15000——1:200001:10000 1:25000——1:35000表1(四)数据准备1.空三加密成果数据(控制点文件、加密点文件、内方位、外方位文件等)2.航飞原始影像航片(最好统一调色后)3.相机参数文件4.立体模型5.测区结合图6.正射影像资料7.数据说明文档及特殊附件(五)作业区的划分测图负责人应遵循项目计划、作业人数、作业人员技能等级以及采集设备的现实状况划分作业区,同时标明测区间接边负责人。
采集数据不同,作业区划分时的要求也不一样,划分原则如下:1.划分作业区内应有建筑模型;2.优先以线状地物(如公路、铁路、河流、街道等)地物为作业区分区线;(六)VirtuoZo IGS快捷键设置IGS 测图软件中,【工具>自定义快捷键】可自定义操作快捷键。
一般情况下,不建议修改软件默认快捷键,尽可能定义未定义功能键。
IGS 快捷键平面锁定/解锁P 按指定宽度平行拷贝地物Alt+N 移动到测标当前位置M 地物反转Alt+K 输入符号码F2 地物闭合Alt+C 编辑上一个或节点 B 地物直角化Alt+P 编辑下一个或节点N 屋檐改正Alt+A 刷新立体窗口中的矢量 E 坐标系旋转Alt+X 文字注记Alt+3 IGS 选项O符号化地物绘制Alt+2 快捷选择符号Shift+F 编辑选中地物的当前点坐标Alt+G 建立新的测图文件Ctrl+N 打开一个现有文件Ctrl+O 撤消最后一步操作Ctrl+Z 刷新显示当前文件F5 放大Shift+Z 设置自动切换测标颜色X 缩小Shift+X 切换测标颜色 C 全屏显示Shift+W 全屏显示模式切换Ctrl+F 矩形区域缩放Shift+V 输入点Shift+1 连接Alt+I输入线Shift+2 半自动添加等高线注记Alt+O 输入曲线Shift+3 数据压缩Alt+Y 输入圆Shift+4 曲线修测Shift+M 输入弧Shift+5 直角线Shift+8 输入手画线Shift+6 矩形Shift+9 输入隐藏线Shift+7 自动绘制地物的一个平行物Shift+P 自动闭合Shift+C 符号表Alt+S 自动直角化Shift+R 咬合Ctrl+D 自动高程注记Shift+H 自定义快捷键方向捕捉Shift+D Scroll Left A移动地物Alt+J Scroll Right D删除地物Alt+D Scroll Down S打断地物Alt+B Scroll Up W表2三、 工作流程图2(一)数据采集前准备1.空三成果数据准备1)例如:以测区supresoft为例,该测区作业范围含3个立体模型,需要拷贝资料如:2)其中images文件夹中为图43)例:img_3443.vz_img_3442.vz文件夹中图5(二)恢复测区、设置测区及模型参数1.恢复测区1)将测区文件夹拷贝到本机(最好在硬盘根目录下)恢复测区图62.设置测区及模型参数图6注:1)测区参数设置视具体项目要求设定。
2)测区文件默认保存在v irlog\blocks 目录下3.模型参数设置。
打开模型后,图7将显示测区名称与模型名称,表示当前待编辑的测区与模型。
【设置>模型参数】,将核线影像参数设置为“水平核线”或“非水平核线”(参考本指导手册第七部分)。
图74.模型定向进入模型相对定向,在影像窗口右键“全局显示”,“定义作业区”。
图8中的数值实际作业中要求不大于0.008(视相机参数而异),同名点数不得少于35个。
图8注:1)绘制作业区必须在左影像与右影像可视范围内。
2)同名点数少于35个时,在影像窗口右键选择“自动相对定向”,软件自动寻找并添加同名点。
3)实际作业中,满足足够多点数的情况下,需删除大于或等于0.008的值。
4)确认满足要求后,右键“保存”,退出即完成该模型定向。
5.核线重采样【处理>核线重采样】,对模型核线重采样,生成核线影像。
图96.数字化测图1)【测图>IGS 数字化测图】调用I GS 测图模块。
图102)新建矢量“xyz”图11导入需采集的范围线(dxf 必须为A utoCAD R12/L T2 文件类型。
)【文件>按图设置矢量范围】3)装载立体模型采集图12图13注:1)IGS 仅允许以数字建立图层,最大字符长度最好在4字符。
2)输入图层名称后,在影像窗口开始立体采集后正式激活图层。
3)1个测区含多个模型,一般由不同的人员采集,需区分一般建筑物及特殊建筑物图层。
4)相对定向时,需定义模型作业边界。
一般以立体像对中控制点连线采集(低空数据一般采集立体影像的中心区域的70%。
四、 基于立体采集特征线生成高精度DEM(一)DEM格网设置1:500、1:1000、1:2000 数字高程模型格网设置:比例尺格网尺寸(单位M)1:500 0.51:1000 11:2000 2表3(二)矢量数据分层要求为方便项目检查、管理及数据使用,DEM特征线采集应用数字代码进行分层,道路、居民地、面状水域岸线、山体的地物代码应用不同代码区分开,同一个项目分层代码应统一。
(可使用IGS默认分层)(三)特征线采集要求1.特征线之间必须使用三维咬合(捕捉)。
2.特征线图层归类应正确。
3.路边线、水边线、陡坎线精实采集。
4.房屋所处地势高差在0.5米范围内,可视为平面绘制地基线。
5.针对两边高程一样的公路(河流等),使用复制特征线方法确保节点的对称性。
6.公路中间的绿化带不用采集,采集路边线即可。
7.同一水面水边线高程一致(湖泊、水塘等)。
8.大型挖掘区主要表现大面积坑洼或高深坑洼。
(坎上、坎下要有特征线)9.陡坎边或水边的房屋地基线尽量扩大,避免房屋悬空。
10.房屋前后的地势高差较大时(例如屋前是两层,屋后三层,中间有陡坎),地基线按实际地形采集(视情况区分,明显与坡上有缝隙的建筑物,地基应为平地)11.项目测区范围外的特征线要封闭。
(四)特征线接边检查1.检查特征线之间拓扑关系是否正确,不能有重叠、交叉等现象。
2.检查模型接边处的特征线高程是否一致。
3.检查不同类型的特征线间的高程是否矛盾。
4.检查特征线图层、属性是否错误。
5.检查是否有漏绘、错绘的特征线。
6.检查特征线是否与地表切准。
7.检查静止的水面是否置平,流动的水面高程是否符合逻辑。
(五)DEM 生成1.在IGS 软件界面中,执行【文件>导出>DXF 文件…】,设置*.dxf 输出路径,输出文件类型为“R12版的DXF文件”,设置输出图形类别。
图142.Autocad中打开test.dxf文件,删除除地形特征线以外的图形,“purge”清理冗余文件,另存为“R12版的DXF文件”。
图153.【文件>引入>地形数据文件】,设置DEM输出参数。
图16注:1) 图层信息为对应*.dxf文件地形特征线图层。
2) X/Y间距为输出DEM网格尺寸。
4.【显示>立体显示>透视显示】可预览DEM图17(六)DEM 拼接、裁切1.使用【高级>DEM拼接与裁切】工具,如:图182.对所有单模型的DEM 进行拼接。
如:图193.鼠标设定范围以点,选择菜单中的【处理>裁DEM边界】弹出如下提示,如下图所示:图204.可以根据模型的重叠度来设定。