(最终)基于C8051F121和XSZ的无线电罗盘角度测量的设计
基于C8051F的便携式无线多支点称重系统设计
C8O5lF
SM4 1—96
RXD TXD
TXD RXD
GND
GND
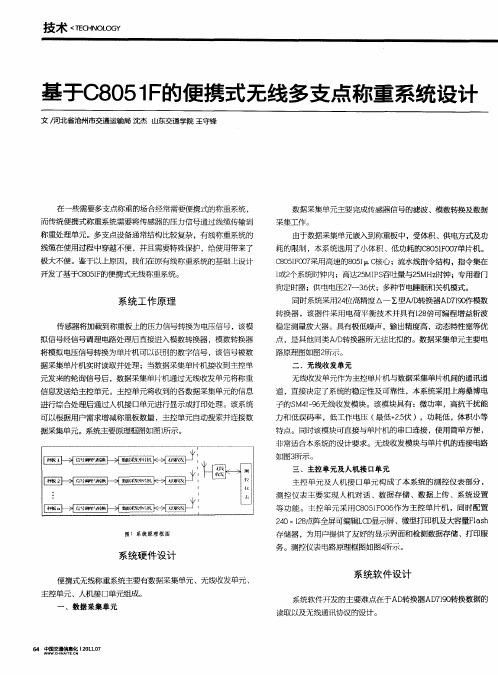
图3 无线 收发 模块 与单 片机 连接 图
图4 测控 仪表 电路原 理框 图
图5 无线 接牧 中断 处理 流程 图
。 。 I恩H n。 交N .烹 C 通 I
传感 器 将加 载到 称重板 上 的压 力信 号转 换为 电压 信号 ,该模 拟信 号经 信 号调 理 电路处 理后 直接 进 入模 数转 换器 ,模 数 转换 器 将模 拟 电压信 号 转换 为单 片机 可 以识 别 的数字 信号 ,该 信 号被 数 据采 集单 片机 实 时读 取并 处理 ;当数据 采 集单 片机 接收 到 主控单 元发 来 的轮询 信号 后 ,数 据采 集单 片机 通 过无 线收 发单 元将 称重 信息 发送 给 主控 单元 。主控 单元 将收 到 的各数 据 采集 单元 的信 息 进行 综 合处 理后 通过 人机 接 口单 元进 行显 示 或打 印处 理 。该系 统 可以 根据 用户 需 求增 减称 重板 数 量 ,主控 单元 自动搜 索并 连接 数 据采 集单元 。系 统主 要原 理框 图如 图l 所示 。
一
务 。测控 仪表 电路原 理框 图如 图4 示 。 所
系统软件设计
系 统 软件 开发 的 主要 难点 在于 AD 换器 AD lO 换数 据 的 转 79 转
读取 以及 无线通 讯协 议 的设计 。
、
数据 采集单 元
责 任编辑
李
鹏
l Fl I O
图2信 号调 理 与模 数转 换 电路图
技 术 <E NL Y T HOO C G
基 于G8 5 的便 携 式无 线 多 支点 称 重 系 统 设 计 0 1 F
基于STC单片机的电子罗盘-超声波测障系统设计

基于STC单片机的电子罗盘-超声波测障系统设计
周鹏
【期刊名称】《电子设计工程》
【年(卷),期】2013(21)10
【摘要】为了提高移动机器人的定位能力,提出一种基于STC89C52单片机的电子罗盘-超声波测障系统方案,并完成系统的软硬件设计.系统中,电子罗盘模块测试障碍物的方位(角度和方向),超声波模块测试与障碍物的距离,STC89C52单片机系统处理上述数据后在液晶显示器LCD1602上显示.实验表明,系统能精确测试障碍物的方位和距离,并实时显示,达到设计要求.
【总页数】4页(P163-166)
【作者】周鹏
【作者单位】华侨大学信息学院,福建厦门361021
【正文语种】中文
【中图分类】TP368
【相关文献】
1.基于超声波的自动避障双轮平衡车控制系统设计 [J], 孙亚飞
2.基于STC单片机的超声波测距系统设计1 [J], 周全;邹华东;刘领
3.基于超声波阵列的无人船避障系统设计与实现 [J], 黄艳虎; 覃红强; 吴学思; 李月; 李堂明; 黄晓锋
4.基于超声波避障的导盲系统设计 [J], 曹开颜;付明慧;吴俊涛
5.农用四轴飞行器避障控制系统设计——基于机器视觉和超声波测距 [J], 吴春玉
因版权原因,仅展示原文概要,查看原文内容请购买。
基于C8051F120的高精度全天候超声测风仪的设计

基于C8051F120的高精度全天候超声测风仪的设计于洋;石佳;陈亮;刘砚菊【期刊名称】《传感技术学报》【年(卷),期】2012(025)011【摘要】本文在传统超声波测风仪的基本原理上,通过测量介质中温湿度数据并且进行有效的调节,进而补偿雨雾等环境因素影响,设计了一种具有温湿度传感器的全天候超声测风仪.文中详细阐述了超声测风仪的方法研究和系统结构,通过实验证明该装置可以实现全天候精确测量风速与风向,测量误差2%,为在恶劣环境下超声测风的应用提供了有效的设计方法.%This paper is on the basic principles of conventional ultrasonic wind measurement by measuring the temperature and humidity in the media and for effective regulation, and thus compensates for rain and fog and other environmental factors affect,this paper designs a temperature and humidity sensor weather ultrasonic wind instrument. The paper elaborated on the method of ultrasonic wind measurement instrument and system architecture, the experiments show that the device can achieve all-weather precision measurement of wind speed and direction, the measurement inaccuracy of 2% ,and open up the way for ultrasonic wind measurement applications in harsh environments.【总页数】4页(P1623-1626)【作者】于洋;石佳;陈亮;刘砚菊【作者单位】沈阳理工大学信息科学与工程学院,沈阳110159;沈阳理工大学信息科学与工程学院,沈阳110159;沈阳理工大学信息科学与工程学院,沈阳110159;沈阳理工大学信息科学与工程学院,沈阳110159【正文语种】中文【中图分类】TP212【相关文献】1.基于FPGA与FSM的高精度测角系统设计与实现 [J], 王鹏;杜卫东;吕志刚;雷斌2.基于双通道旋转变压器的高精度测角系统设计 [J], 崔建飞;孙凤鸣3.高精度超声波测风仪的设计 [J], 曹长宏;蒋立辉4.基于ARM的嵌入式高精度测硫仪的设计 [J], 郭一兵;何梅生;邓小星;王潋;黄海滨5.基于TDC-GP22的超声波测风仪设计 [J], 邢玉品;陈晓因版权原因,仅展示原文概要,查看原文内容请购买。
基于C8051F120的轴角信号采集模块设计及相关应用

由于 ADC电路中选用 MAX197 的输入模拟电 压范围为 - 10 V — + 10 V ,而自整角机激磁信号为 50 Hz的 110 V 电压 ,所以通过 Y型分压网络可以将
3Vm sinωt sinθ, 另 外 两 相 相 减 VBC = VB - VC = Vm sinωtsin (θ+ 120°) - Vm sinωtsin (θ- 120°) = 3Vm sinωtcoθs ,根据上面两式 ,可得 θ= arctg (VA /VBC )。由此 可知 ,我们需要对上式中的 VA 、VBC进行数字化转换既可。
3 李新宇 ,张志勇. C8051F120 的特点及其在多任务实时测试系统 中的应用. 宇航计测技术 , 2008; 28 (2) : 45—49
D esign of Acqu ir ing M odule of Axle2angle S igna ls Ba sed on the C8051F120 M CU
C8051F120单片机内分有 4 页 ,分别是 0 页 、1 页 、2页和 F页 。其不同的特殊功能寄存器位于不 同的页上 ,所以 ,对不同寄存器进行操作时 ,必须先 对其所在的页进行声明 。以串行通信初始化程序 为例 ,在本设计中使用异步 、全双工串口既 UART1 口将单片机处理后的数据发送给上位机以及接受 上位机传来的数据 , UART1口初始化程序规定了串 口的工作模式 、波特率 、定时器 1的工作方式等 。
第 9卷 第 22期 2009年 11月
167121819 (2009) 2226786204
基于C8051F005无线电高度表检测仪的设计

1随 着现 代航 空的发 展 , 无线 电 高度 表在 各种 飞行 器中 的应 用 已经 非常 普 遗 如 自动 着陆 、轰 炸瞄准 、地形跟 随 、直 升机的 定高盘旋 和低 空导弹 的掠 海 飞行等各 种高度 控制系 统 中, 都应 用 了无 线 电高度表作 为 高度 传感器 。 线 无 电高度表 其 实是 一种 面反 射 的雷 达 ,反射物 体 是海 /地平面 ,无 线 电高度 表有 两个天 线,一 个是发射 天线 ,另 一个是接 收天线 。发射 天线 向海 平面 发 射 电磁波 ,电磁波 从海平面 反射 回来 ,被接 收天线接 收 ,无 线 电高度 表利用 测量发 射信 号和 由地 面反射 回来 的回波信 号之 间的延 迟时 间来确 定地 球表 面 上空 飞行 器 的绝对 高 度 l 。为了保 证 飞行 安全 ,确保 高 度表 性 能可靠 ,在 I 1 飞行前必 须对飞行器 的高度表 进行检测, 目前国 内高度 表的研制 技术 已经 比较 成熟 , 而对 于 高度 表检 测 仪 的研 制技 术 还需 不 断 改进 。 2基 于C85F 0  ̄线 电 高度 表检 测仪 的 系统 组成 和 工作 原理 0 1 05 , 本文所 研制 的无线 电高度表 检测 仪采用 SC o 级高 性能 单片机 C0 10 5 85 F0 , 检 测仪 由低 频接 口 电路 、面板状 态采 集 电路 、面板 状态 显示 电路、面板 数字 显 示 电路 、单片机 系统 、高频控 制 电路 、串 口通信 接 口电路 、外 接测试接 口
数 据存储 器进行 了外 围扩展 , 采用 了两 片容量 为 5 2 1K的W 9 00 2 C4 使得检测 仪 的数 据存储 容量扩 展到 l 。单片 机将数 据存储 到存储 芯片 中备份 ,需要时通 M 过 串 口传送 到 P C机进 行 处理 。 3 4 串 口通 信 电路 . C 0 I0 5内部 集成 一个 串行通信 接 口 U R , 85F0 A T ,我 们采用 了 M X 0 A 2 2芯 片将 输 出信 号 转换 为 R 一 3 S 2 2电平 ,从而 实现检 测仪 与 P 机 的通信 。设计 要 点如下 : () P 1将 O口的 P . 和 P . 分配给 U R 的 T 和 R ,即:X R= X4 O1 O2 AT x x B OO 0 ; () C N寄存器 :配置 U R 2SO A T为工作 方式 1 ,可变 波特 率,U R A T接收允
基于C8051F321单片机的平面数字电子罗盘的研制

图2硬件 电路原理图
引言
近 年 来 ,数 字式 电 子 罗盘 正 向 深 度 智 能 化和 三维 方 向发展 。在 地 质探测 中 ,特 别 是 海底 地 形探测 ,要 保证 方位 角测 量 的高精 度 ,靠 人 工 完 成 是 很 困难 的 ,在 这 项 工 作 中 ,电子 罗盘所 起的作用 非常重 要 。 本 文采 用模块 化 设计 思想 ,设计 并 制作 个高 精 度 ,高 稳定 性的 方位 角数 据采 集模 块 ,为 数 字 电子 罗盘 系统 提供 数据 采集 ,为 确 保倾 角数 据采 集 的稳定 性和 准确性 ,采用 L M3 3 L S 0 D H传感 器集成 芯片 ,并通 过I 接 I C 口后 , 由单 片机进 行 控制 和分 析 ,实现倾 角 数 据采集 ,倾 角数据数 字化 的显示等功 能 。 系统采 用3 7 锂 电池 供电 ,整个数 据采 .V 集 模块 采 用集成 了测 量倾 角传 感器 以及 磁场 传 感器 的L M3 3 L S 0 D H芯片 , 制处 理 的单片 控 机 采用 的是 C 0 1 3 1 片 机 ,此单 片机 速 8 5F 2单 度快 , 稳定性 好 ,对 于本设计 方案 已能 满足要 求 。整 个 系统 的抗干 扰性 好 、设计 灵活 、方 便 ,而 且成 本不 高 ,也适 合于 在比较 恶 劣的 环 境下 进行 现场数 据 测量 。制 作出 的成 品能 够 进行 当地 的方位 角 ,倾 角 、环 境温 度 以及 供 电电池 电量的 数字化显 示 。 本 设计 的整 个过 程分 为以 下几 个主要 的 步骤: 1 )基于 Alim Dein r 电子 罗盘 的 tu sg e 的 电路 原理 图及 电路板的绘制 ; 2 )基于 C 0 1 3 1 8 5 F 2 的单 片机软件 编程 ; 3 )系统 软 硬件 联 合 调试 和 整 机性 能 优 化。
基于C8051F021的定位和报警移动终端设计

基于C8051F021的定位和报警移动终端设计基于C8051F021的定位和报警移动终端设计摘要:C8051F021是美国Cygnal公司生产的单片机。
具有双串口、低功耗、高速度等优点。
本文以GSM的数据业务,设计一种具有报警和定位的移动终端,并介绍该终端的结构框图、工作原理以及I/O 配置和初始化程序。
关键词:C8051F021 GSM模块 GPS模块移动终端定位报警引言GSM网是目前移动通信体制中最成熟、最完善、应用最广的一种系统。
数据业务作为GSM网络的一种基本业务,已得到越来越多的系统运营商和开发商的重视,基于这种业务的各种应用也蓬勃发展起来。
以GSM网络作为无线数据传输网络,可开发出多种前景极其乐观的应用,如无线远程检测和控制、无线自动警报等。
本文基于GSM的数据业务设计一种实时性比较强、数据率为9.6kbps的具有报警和定位的终端。
1 C8051F021简述C8051F021是集成在一块芯片上的混合信号系统级单片机,芯片上有32位数字I/O端口(引脚),与标准8051的端口(P0~3)相同。
C8051F021在功能上有所增强,每个I/O端口都可独立地设置为推挽或开漏输出和弱上拉,这为一些低功耗系统设计提供了节省电源的手段,而其最突出优点就是改进了可以控制片内数字资源与外部I/O 引脚相连的交叉开头网络。
通过设置交叉开关控制寄存器,将人的数字资源输入输出配置为端口I/O引脚,这就允许用户根据自己的特定应用将通用I/O端口与所需数字资源相结合。
C7051F021具有双串口、多中断源、低功耗、高速度、低电压工作(3.3V)、高容量存储器等特性,这些特性满足本终端核心处理器的要求:低功耗、集成度高、可扩展性好等。
2 终端结构框图终端系统是由C8051F021单片机、GSM模块、GPSOEM接收模块、键盘和液晶显示器组成,如图1所示。
C8051F021单片机是用来实时采集终端外围设备数据并进行相应的处理;GSM模块即GSM无线调制解调器,完成和GSM网的接续,负责通过串口接收来自单片机所采集到的数据,并以无线电磁波的形式发送,或接收来自远程计算机发来的`信息并传递给单片机处理;GPSOEM的主要功能是接收卫星发射导航电文的信号,并进行码测量或相位测量,然后根据导航电文提供的卫星位置和时钟差校正信息,计算GPS接收机的当前位置,在单片机的控制下传输定位数据;键盘包括数字键和功能键,数字键用来设置呼叫远程主机的号码,功能键具有相应的报警功能如火警、匪警等和辅助功能;液晶显示器用来显示操作信息和提示信息。
基于C8051F121和XSZ的无线电罗盘角度测量的设计

器 ( S ) 测 角 仪 。 介 绍 了 旋 转 变 压 器 、 转 变 压 器— — 直 流 电 压 转 换 器 的 结 构 和 原 理 , 件 中航 向 角 度 的 算 法 。 XZ的 旋 ;S C 0 11 1 角 旋 X Z; 8 5 F 2
壳体 旋转变 压器本 体定 子 附加变 压器 定子
单 片机 、 显示 电路 和显示 器 。
3 V 00 z 6 4 H
图 1 无 线 电 罗盘 测 角 框 图
器
2 无 线 电罗 盘 旋 转 变压 器
测角 器 即旋转 变压 器位 于 罗盘 内 , 一种 输 出电压 随 转子 是
转 角变 化 的信号元 件 。 励磁 绕组 以一定 频率 的交 流 电压励 磁 当
( 国人 民解放 军 第4 2 . 厂 军械 技 术研 究 室 , 中 3 8x - 山西 长治 0 6 1 ) 4 0 1
摘 要 : 解 决 飞 机 无 线 电 罗盘 输 出 角 度 信 号 的 测 量 问题 , 计 了基 于 C 0 1 1 1和 旋 转 变 压 器— — 直 流 电 压 转 换 为 设 85 F2
出导 航 台相对 飞机 的方 位 角 。 旋转 变压 器 是将 机械 角转 换成 电 信号 的装 置 , 因其 输 出数据 精 确 、 工作 可靠 , 可广 泛应 用 于航 空
电子 装 备 如 雷 达 、 线 电 导 航 设 备 等 的 系 统 中 。 利 用 旋 转 变 压 无
的转 动 角度 ,通 过正 弦余 弦变 换 器传 给 飞 机 的导 航 显示 器 显
22 旋 转 变 压 器 的 工 作 原 理 .
鉴 相 式 工 作 方 式 是 一 种 根 据 旋 转 变 压 器 转 子 绕 组 中 感 应
基于磁阻传感器与微处理器的二维磁电子罗盘的设计

基于磁阻传感器与微处理器的二维磁电子罗盘的设计
李怡达;张中平;秦明;黄庆安
【期刊名称】《功能材料与器件学报》
【年(卷),期】2008(14)2
【摘要】介绍了磁电子罗盘的工作原理。
利用Honeywell的HMC1022双轴磁阻传感器设计了一种小型化的电子罗盘。
信号调理电路采用AD8656高精度放大器。
利用C8051F350微处理器完成A/D转换、方位角计算以及数字化输出等工作。
采用置位电路配合微处理器有效解决了传感器失调和漂移的影响。
对硬铁干扰和软铁干扰进行了分析,并给出了解决方法。
对数字罗盘实物进行了测试,最大误差小于1°。
【总页数】4页(P557-560)
【关键词】磁阻传感器;微处理器;二维磁电子罗盘
【作者】李怡达;张中平;秦明;黄庆安
【作者单位】东南大学MEMS教育部重点实验室
【正文语种】中文
【中图分类】V241.611
【相关文献】
1.基于磁阻传感器的车载型磁电子罗盘的设计 [J], 程波;徐威;何鹄;靳佰良
2.基于隧道磁阻传感器的三维电子罗盘设计∗ [J], 王琪;李孟委;王增跃;蒋孝勇;李锡广
3.基于磁阻传感器的二维电子罗盘设计 [J], 施利春;肖海梅
4.基于磁阻传感器和加速度计的电子罗盘设计 [J], 杨红红;程慧娟
5.基于HMC1022磁阻传感器的数字电子罗盘的设计与实现 [J], 王丽颖;支炜;孙红霞;张伟
因版权原因,仅展示原文概要,查看原文内容请购买。
基于C8051F021的便携式姿态测量系统

基于C8051F021的便携式姿态测量系统
孙照鑫;赵忠;李秉玺;孙肇伟
【期刊名称】《仪表技术与传感器》
【年(卷),期】2004(000)011
【摘要】介绍一种以C8051F021为核心的便携式姿态测量系统,详细论述了该系统的工作原理和软硬件设计,并介绍了一种有效的误差修正方法.系统不仅提供了俯仰角、横滚角、方向角等航姿参数直观的液晶显示,还为用户提供了多种数字量和模拟量的输出.测试结果表明:系统输出准确,工作稳定.
【总页数】2页(P37-38)
【作者】孙照鑫;赵忠;李秉玺;孙肇伟
【作者单位】西北工业大学自动化学院,陕西,西安,710072;西北工业大学自动化学院,陕西,西安,710072;西北工业大学自动化学院,陕西,西安,710072;西北工业大学自动化学院,陕西,西安,710072
【正文语种】中文
【中图分类】TP212
【相关文献】
1.姿态测量系统中两种姿态解算方法的分析比较 [J], 崔晓阳;白茹;吴涛;钱正洪
2.基于Rodrigues参数的多线阵CCD外姿态测量系统的姿态解算 [J], 李晶;袁峰;丁振良
3.基于C8051F021的剩余电压测量系统设计 [J], 付艳玲;肖海清;王宏伟;李秀学
4.基于C8051F021的便携式心电监视仪 [J], 徐灵飞;向平
5.小型便携式船舶姿态测量系统研究 [J], 金鸿章;王帆;綦志刚
因版权原因,仅展示原文概要,查看原文内容请购买。
基于C805lF121单片机的无线电罗盘测试仪的设计
对 飞机 的方位 角 。将 这个 角度信 号传送 到指示 器显 示 。
2 测试 需 求
无 线 电罗 盘测 试仪 应 具备 电 源功 能 、 量功 能 、 示 功能 测 显 等、 同时应 具备测 量状态 开关 及相应 的对 外接 口等 。测试仪 测
量 的 信 号 见 表 1 。
表 1 测 试 仪 测量 的信 号 表
环 状 天 线 的 方 向 图 , 横 8字 形 , 脏 型 方 向 , 图 1 当 呈 心 见 。
O 引 言
为 了 适 应 高 科 技 条 件 下 的 现 代 战 争 , 仅 要 不 断 地 提 高 战 不
电波来 向与环 面法线 重合 时天线输 出信 号为 0 。当在 0方 向上 有导 航 台时 , 接收机 输 出信号按 时序 分别 为 B与 A。由于 导航 台在 飞机 右侧 , > B A,无线 电 罗盘输 出 的右偏 信号控 制一 个 双 向 电动机 , 电动 机带 动环 状 天线 旋转 . 旋转 的方 向应 使 B减小 而使 A增 大 , 到 B A, 直 = 即环面 法线 和导 航 台 电波来 向重 合为
止 。 环 状 天 线 转 过 的 角 度 就 是 导 航 台 的 相 对 方 位 角 , 航 台 相 导
斗机 的性能 。 而且 对相应 检测 设备 也提 出了更 高要求 。先进 测
试 技 术 的 应 用 是 战 斗 机 维 护 修 理 的 发 展 方 向 , 减 少 维 修 时 间 是
和提高装 备完好 率的重 要 手段 。 无线 电罗盘 作为 一种重 要 的机
3 整 体 设 计 思 路
本 测 试 仪 专 用 性 强 , 可 靠 性 、 全 性 要 求 高 , 此 采 用 成 对 安 因
一种基于无线电罗盘的自动测试系统设计

一种基于无线电罗盘的自动测试系统设计
张倩;潘涌泽
【期刊名称】《电子测量技术》
【年(卷),期】2006(29)3
【摘要】介绍了无线电罗盘自动测试系统的设计与实现,详细论述了自动测试系统的硬件设计。
该系统人机界面友好、操作简单、测试精度高、安全性和可靠性强,可扩展性好。
【总页数】3页(P153-154)
【关键词】自动测试;VXI总线;测试单元适配器
【作者】张倩;潘涌泽
【作者单位】北京航空航天大学电子信息工程学院
【正文语种】中文
【中图分类】TN92
【相关文献】
1.一种基于LabVIEW和第三方驱动程序的无线电环境自动测试平台 [J], 李升阳;董亮;乐林株
2.基于软件无线电的罗盘激励器系统设计 [J], 董理濛;李勇
3.一种基于Labview的数字电路自动测试系统设计 [J], 邢连营;
4.一种基于FTA的发射装置自动测试和故障诊断系统设计 [J], 高岚;王伟涛
5.基于软件无线电技术的电台自动测试系统设计 [J], 徐圣杰
因版权原因,仅展示原文概要,查看原文内容请购买。
基于C8051F005单片机和MEMS加速度传感器ADXL311的倾角仪
基于C8051F005单片机和MEMS加速度传感器ADXL311
的倾角仪
丛培田;孟海星;韩辉;罗旋
【期刊名称】《仪表技术与传感器》
【年(卷),期】2010(000)001
【摘要】提出了一种基于C8051F005单片机和ADXL311双轴加速度传感器的数字式倾角仪的设计方法,并介绍了其软硬件的实现.该倾角仪的工作原理是依次在0°、90°、180° 3个不同位置,由C8051F005单片机A/D转换进行定标,然后将处理后的数据送外部设备显示.该倾角仪首次使用需先进行标定,改善因在不同工作环境下
所产生的角度误差,与传统的倾角仪相比具有很高的灵敏度,满足各种不同场合下测
量精度的要求.
【总页数】3页(P36-37,41)
【作者】丛培田;孟海星;韩辉;罗旋
【作者单位】沈阳理工大学机械工程学院,辽宁沈阳,110168;沈阳理工大学机械工
程学院,辽宁沈阳,110168;沈阳理工大学机械工程学院,辽宁沈阳,110168;沈阳工业
大学机械工程学院,辽宁沈阳,110178
【正文语种】中文
【中图分类】TP212.9
【相关文献】
1.基于MEMS加速度传感器的云高仪倾角和振动测量 [J], 何俊峰;张玉钧;陈臻懿;阮俊
2.基于C8051F005单片机航空交流电参数测试仪的设计 [J], 呼靳宏;郝迎吉;王瑜;王蒙
3.基于MEMS加速度传感器的数字倾角仪设计 [J], 沙承贤;李杰;翟成瑞;王博;胡丽丽
4.基于MEMS加速度传感器的倾角仪设计方法 [J], 苏君;王占平
5.基于MEMS加速度传感器的倾角仪设计方法 [J], 苏君;王占平
因版权原因,仅展示原文概要,查看原文内容请购买。
基于C8051F005的变压器电气特性自动测量装置设计
基于C8051F005的变压器电气特性自动测量装置设计耿彦波;苏培力;蔡腾潜
【期刊名称】《农村电气化》
【年(卷),期】2009()4
【摘要】提出了一种基于C8051F005高性能单片机的变压器电气特性自动测量装置的设计方案,硬件方面采用模块化的设计思想,将整个试验程序分成数个功能单一的独立模块,模块间通过单片机控制。
软件采用模块化编程方法,采用不同的模块就能完成不同试验项目的测量分析,便于修改和调试。
实际使用和运行经验表明,该系统运行可靠,功能强大,操作方便,进一步提高了变压器试验的自动化水平。
【总页数】3页(P61-63)
【关键词】变压器特性分析;模块化编程;C8051F005
【作者】耿彦波;苏培力;蔡腾潜
【作者单位】河北省高邑县供电公司;河北省栾城县供电公司;河北省秦皇岛市电力公司
【正文语种】中文
【中图分类】TM403.9
【相关文献】
1.基于差动变压器位移测量装置的设计 [J], 田应伟;张德磊;陈创
2.基于PLC的自动化变压器继电保护装置设计 [J], 张飞
3.基于单片机的差动变压器位移测量装置的设计 [J], 白广新
4.基于滤波片吸收特性的全自动单色光波长测量装置 [J], 高贻钧;魏薇
5.基于PLC的自动化变压器继电保护装置设计 [J], 张飞
因版权原因,仅展示原文概要,查看原文内容请购买。
基于C8051F352单片机的弹道参数测量系统设计

基于C8051F352单片机的弹道参数测量系统设计
李亚楠;王金柱;马继存;孙文理
【期刊名称】《传感器与微系统》
【年(卷),期】2015(034)005
【摘要】为提高弹道辨识精度和弹道解算速度,设计了一种基于C8051F352单片机的弹道参数测量系统.通过对弹丸飞行中动压和静压信息的采集、存储和处理,完成弹道参数(初速和射角)辨识.该系统以C8051F352单片机作为处理单元,结合差压传感器和绝压传感器设计而成,采用基于动压-静压的弹道辨识方法,有效地提高了弹道参数测量的精度.实验测试表明:该系统测量精度高,解算速度快,满足弹道辨识的设计要求.
【总页数】4页(P66-68,71)
【作者】李亚楠;王金柱;马继存;孙文理
【作者单位】军械工程学院弹药工程系,河北石家庄050003;军械工程学院弹药工程系,河北石家庄050003;军械工程学院弹药工程系,河北石家庄050003;76316部队,广东河源517300
【正文语种】中文
【中图分类】TP27
【相关文献】
1.基于MEMS/北斗的火箭弹弹道参数测量方法 [J], 张浩然;易文俊;管军;袁丹丹;孙蕾
2.基于MEMS/北斗的火箭弹弹道参数测量方法 [J], 张浩然;易文俊;管军;袁丹丹;孙蕾
3.基于伪卫星定位的弹道修正引信用弹道参数测量系统研究 [J], 张剑;李世义;李会杰
4.基于C8051F352型单片机的无人机高度传感器测量系统设计 [J], 吕亚强;毛瑞娟;严家明
5.基于单片机的风参数测量系统设计 [J], 张华;陈爱国
因版权原因,仅展示原文概要,查看原文内容请购买。
基于C8051F系列单片机线圈检测的设计与实现

基于C8051F系列单片机线圈检测的设计与实现
闵信余;陆阳
【期刊名称】《现代计算机(专业版)》
【年(卷),期】2005(000)010
【摘要】近年来线圈检测在智能交通系统得到了广泛应用,且正在逐步推广应用到其他领域.本文首先介绍了线圈检测的原理,并在此基础上针对线圈检测易受外界环境因素的影响,提出一种软件动态刷新基准的方法来提高检测的可靠性和准确性:然后详细讨论了基于C8051F系列单片机实现此类检测器软硬件设计的要点,并给出了外围线圈检测电路原理图.
【总页数】3页(P98-100)
【作者】闵信余;陆阳
【作者单位】合肥工业大学计算机与信息学院,合肥,230009;合肥工业大学计算机与信息学院,合肥,230009
【正文语种】中文
【中图分类】TP3
【相关文献】
1.基于C8051F350单片机的直流电子脱扣器检测仪的设计与实现 [J], 姜应战;刘金辉;姜海龙;李践飞
2.基于C8051F350单片机的智能仪表设计与实现 [J], 焦震;陈鹏;刘海山;樊茜;丁怀龙;杨帆
3.基于C8051F120单片机自动重合闸系统的设计与实现 [J], 张毅;李建伟
4.基于C8051F120单片机的舰船空气压缩机气阀故障检测装置的设计与实现 [J], 姜应战;孙团;周爱慧
5.基于C8051F020单片机的双接口OLED控制器设计与实现 [J], WU Chunfeng;WANG Yongwei;WANG Zhiqian;LIU Shaojin;LIU Yusheng
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于C8051F121和XSZ的无线电罗盘角度测量的设计张凯马程群孟盈梁琦中国人民解放军第4328工厂军械技术研究室,山西长治, 046011摘要:为解决机无线电罗盘输出角度信号的测量问题,设计了基于C8051F121和旋转变压器一直流电压转换器(XSZ)的测角仪。
本文在介绍旋转变压器、旋转变压器一直流电压转换器的结构和原理, 软件中航向角度的算法。
关键词:角度信号,旋转变压器,XSZ,C8051F121Design of the Testing angle signal for Radio CompassAbstract on C8051F121 And XSZZHANG-kai,MA Cheng-qun,MENG Ying, LIANG QiLab of Ordnance ,The 4328 factory of Chinese people’s Liberation Army, Changzhi,Shanxi, 046011I n order to realize measuring of radio compass ,angle signal measuring instrument is designed based on the C8051F121 and XSZ .This paper introduces rotating transforme. XSZ structure and principle, the software algorithm of heading angle.Key words: angle signal, rotating transforme , XSZ, C8051F1211引言无线电罗盘中的测量角度的装置为测角器(旋转变压器),输出导航台相对飞机的方位角。
旋转变压器[1]是将机械角转换成电信号的装置,因其输出数据精确、工作可靠,可广泛应用于航空电子装备如雷达、无线电导航设备等的系统中。
利用旋转变压器—直流电压转换器[2](XSZ)可以实现旋转变压器与单片机接口,而且可以进行角度信号的测量与显示。
2 无线电罗盘测角总体设计角度信号测量利用旋转变压器—直流电压转换器,将罗盘中的旋转变压器输出信号变换成直流电压,在单片机的控制下将航空电子设备中旋转变压器输出的角度信号测量出来[3],其组成框图,见图1。
包括旋转变压器直流电压转换器、调理电路、单片机、显示电路和显示器。
图1 无线电罗盘测角框图3、无线电罗盘旋转变压器概述测角器既旋转变压器(测角器)位于罗盘内,是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算和角度数据传输。
测角器的相互垂直定子线圈与环形天线两个互相垂直的天线线圈相连接。
转子(搜索)线圈在定子线圈磁场中旋转。
转子线圈与导航台电磁场的合成矢量在方向上重合。
环形天线和测角器的方向性图就等于机械转动的单绕组环形天线方向性图。
环形天线方向性图的转动角度,通过正弦余弦变换器传给飞机的导航显示器显示。
3.1、旋转变压器结构无线电罗盘中采用无刷式旋转变压器,见图2。
它分为两大部分,即旋转变压器本体和附加变压器。
附加变压器的原、副边铁心及其线圈均成环形,分别固定于转子轴和壳体上,径向留有一定的间隙。
旋转变压器本体的转子绕组与附加变压器原边线圈连在一起,在附加变压器原边线圈中的电信号,即转子绕组中的电信号,通过电磁耦合,经附加变压器副边线圈间接地送出去。
这种结构避免了电刷与滑环之间的不良接触造成的影响,提高了旋转变压器的可靠性及使用寿命。
图2 无刷式旋转变压器3.2、旋转变压器的工作原理鉴相式工作[2]方式是一种根据旋转变压器转子绕组中感应电势的相位来确定被测位移大小的检测方式。
如图3所示,定子绕组和转子绕组均由两个匝数相等互相垂直的绕组组成。
图中 S 1S 2为定子主绕组, K 1 K 2为定子辅助绕组。
当S 1S 2和K 1 K 2中分别通以交变激磁电压时:t cos ωm sV V = (1) t sin ωm s V V = (2)根据线性叠加原理,可在转子绕组B 1B 2中得到感应电势V B ,其值为激磁电压V s 和V k 在B 1B 2中产生感应电势V BS 和V BK 之和,即:)-t sin(tcos s K tsin cos -K cos K )sin(-K m m m m θωθωθωωθm BK BS B KV in V V V V V V V =+=+=+= (3)图3 旋转变压器电气工作原理由式(1)(2)和(3)可见,旋转变压器转子绕组中的感应电势V B 与定子绕组中的激磁电压同频率,但相位不同,其差值为θ。
而θ角是被测位移,通过比较感应电势V B 与定子激磁电压信号V k 的相位,便可求出θ。
4 器件的选择及应用4.1 单片机C8051F121[4]是完全集成的混合信号片上系统型 MCU 芯片,在工业温度范围(-45℃到+85℃)工作。
端口 I/O 、/RST 和 JTAG 引脚都容许5V 的输入信号电压具有64个数字I/O 引脚TQFP 封装。
主要特点是,高速、流水线结构的8051 兼容的CIP-51 内核100MIPS ;全速、非侵入式的在系统调试接口(片内);12位或10 位、100 ksps的ADC,带 PGA 和 8通道模拟多路开关;8位500 ksps的ADC,带 PGA 和 8 通道模拟多路开关;两个12位DAC,具有可编程数据更新方式;2 周期的16 x 16乘法和累加引擎;128KB或64KB 可在系统编程的 FLASH 存储器;8448(8K+256)字节的片内RAM ;可寻址64KB 地址空间的外部数据存储器接口;硬件实现的SPI、SMBus/ I2C 和两个 UART 串行接口;5个通用的16位定时器;具有6个捕捉/比较模块的可编程计数器/定时器阵列;片内看门狗定时器、VDD 监视器和温度传感器。
角度信号调理电路将来自旋转变压器的角度信号进行运算,满足单片机输入信号要求。
图4 角度信号调理电路4.2旋转变压器一直流电压转换器根据测试角度精度要求0.1°(1/3600)的要求。
本文选择14位旋转变压器—直流电压转换器(XSZ)。
它包含一个跟踪型旋转变压器和一个精度D/A转换电路,其输出的直流电压与输入的角度成正比例,可接收四线旋转变压器信号。
当输入的角度是±180°时,其输出对应于±10V。
本文选择中国船舶工业总公司第七研究院第七一六研产的14XDZ243-±10/旋转变压器信号-直流电压转换器[5]。
4.2.1 工作原理图5 转换器原理框图旋转变压器四线输出接至模块上的S1、S2、S3和S4引脚端,Vs1-s3 =KVRH-RLSinωtSinθ;Vs4-s2 =KVRH-RLSinωtCos θ, θ是自整角轴角,VRH-RL是激励电压。
旋转变压器-直流电压转换器的电气连接,旋转变压器引线端D1、D2 、Z1、 Z2、Z3 、Z4 和分别接XSZ 引脚RH、 RL、 S1 、S2 、S3 和S4。
速度电压输出端VEL该端的输出信号是一个跟输入轴角角速度成比例的直流模拟信号,VEL的极性跟输入轴角的转向有关(数码增大时为正,减小时为负),幅值跟输入轴角角速度成正比(±10V 时对应该转器的最高跟踪速率)。
直流电压信号输出端OUT当输入的角度是±180°时,其输出对应于±10V,其输入输出关系如图6所示。
图6 输入角度和输出电压关系图4.2.3 输入信号的比例电阻转换器的这种特点使有高电压信号和参考输入的传感器可以用比例匹配电阻分压的方法与任一种低电压信号和参考输入的转换器相连,能够实现用低电压信号或参考的转换器适用于高电压信号或参考的传感器。
这意味着一个标准转换器与一个专用插件板可以在一个传感器信号和参考输入电压较宽的范围中使用。
旋转变压器—直流电压转换器外加比例电阻的计算方法是:信号每增加1V,分别在S1 和S2 串连2.22kΩ电阻,参考每增加1V,在RH 端串联2.2kΩ电阻。
例如,设我们有一个线—线电压11.8V、参考26V 的旋转变压器-直流电压转换器,与线-线电压60V、参考115V 的旋转变压器相连。
在每个信号输入端增加的电压是:60V-11.8V=48.2V因此,需要增加的两个电阻的阻值为:48.2×2.2=107kΩ。
同理,在“RH”端需串联的一个电阻值可以计算得到是:195.8k Ω。
转换器的输入端可以按下图7所示接入比例电阻。
R1、R2=107 kΩ,RF=195.8Kω, R1~R2为同型号精密电阻器,功率不小于0.1W,相对误差不大于0.l%,绝对误差不大于2%;RF 的误差范围应小于10%。
图7转换器外接信号比例电阻连接图4.2.4显示器本文采用北京迪文科技有限公司DMT64480T056-01W5.6寸LED背光65K真彩色液显屏。
5 软件设计中航向角度的算法本文采用Keil C51[6]进行软件设计,在测量无线电罗盘工作过程中方向角度信号等,并通过LCD显示屏实时输出测量结果。
软件运行于测量电路的单片机之中,通过标准串行接口向LCD显示屏输出测量数据。
航向角度的显示范围是0°~360°,实际的取值范围是-180°~180°,软件是用电压值模拟角度值,所以对应的电压值为-10V~+10V。
也就是说±10V 对应的角度都是180°。
这样带来的问题是,如果航向角度由179°穿越180°到达181°,电压值会有一个由+10V到-10V 的跳变,期间单片机有可能采集到数据在+10V到-10V的任意中间值,这样会导致采集的数据有误,从而带来了一些显示问题。
在边界点的数据采样有以下7种特殊情况,见图8 。
图8 边界点数据采样情况ps:总共4个采样点,其幅值的模拟量从左到右依次用#1,#2,#3,#4来表示。
max = MAX(#1,#2,#3,#4);min = MIN(#1,#2,#3,#4);level = ±10V幅值差。
改进算法如下:取定#1、#2、#3点,将#4替换为max;取定#1、#2、#3点,将#4替换为 #4+level;取定#1、#2点,将#3替换为max,将#4替换为 #4+level;取定#1、#2点,将#3替换为 #3+level,将#4替换为 #4+level;取定#1点,将#2替换为max,将#3替换为 #3+level,将#4替换为 #4+level;取定#1点,将#2替换为 #2+level,将#3替换为 #3+level,将#4替换为 #4+level;取定#2、#3、#4点,将#1替换为min;ps:将下降沿的各点加level幅值,相当于在上升沿附近取平均,角度超过对应max,角度再减去180°便可以正确显示。