传感器课程设计列车测速测距系统方案
最新光电传感器课程设计汽车测速系统精品版
2020年光电传感器课程设计汽车测速系统精品版光电信息技术研究性教学报告题目:汽车测速系统目录No table of contents entries found.一、摘要社会时代的快速发展,汽车在人们日常生活中越来越重要,随着汽车的日益普及,由于碰撞而引起的事故也越来越多,其中倒车碰撞、超速碰撞占碰撞事故的大部分。
为了尽量防止超速等问题、提高安全性。
本文设计了一种测速器系统,方便司机根据车速安全行车。
转速测量方法转速是指作圆周运动的物体在单位时间内所转过的圈数 ,其大小及变化往往意味着机器设备运转的正常与否 ,因此 ,转速测量一直是工业领域的一个重要问题。
按照不同的理论方法 ,先后产生过模拟测速法 (如离心式转速表 )、同步测速法 (如机械式或闪光式频闪测速仪 )以及计数测速法。
计数测速法又可分为机械式定时计数法和电子式定时计数法。
对转速的测量实际上是对转子旋转引起的周期脉冲信号的频率进行测量。
在频率的工程测量中 ,电子式定时计数测量频率的方法一般有三种 :①测频率法 :在一定时间间隔t内 ,计数被测信号的重复变化次数N ,则被测信号的频率fx可表示为fx =Nt(1);②测周期法 :在被测信号的一个周期内 ,计数时钟脉冲数m0 ,则被测信号频率fx=fc/m0 ,其中 ,fc为时钟脉冲信号频率;③多周期测频法 :在被测信号m1个周期内 ,计数时钟脉冲数m2 ,从而得到被测信号频率fx,则fx可以表示为fx=m1fcm2,m1由测量准确度确定。
二、系统整体方案设计1、系统框图各部分模块的功能:①传感器:用来对信号的采样。
②放大、整形电路:对传感器送过来的信号进行放大和整形,在送入单片机进行数据的处理转换。
④片机:对处理过的信号进行转换成转速的实际值,送入LED⑤LED显示:用来对所测量到的转速进行显示。
2光电式转速传感器:光电式传感器是将被测量的变化转换成光信号的变化,再通过光电器件把光信号的变化转换成电信号的一种传感器。
基于加速度传感器的速度及路程测量系统
Sk
h ( f ( xk ) 4 f ( x 1 ) f ( xk 1 )) k 6 2
Simpson 公式中每一个小微段用到三个点积分,所以我们积分时对每三个点进行积分从 而得到如下的公式
其中
h
是采样周期的二倍,
n
a 为采集到的加速度,n 为信息处理的周期。
n/ 2 n/ 2 h Vt Vk (a0 4 a2 k 2 a2 k 1 an ) 6 k 0 k 1 k 1
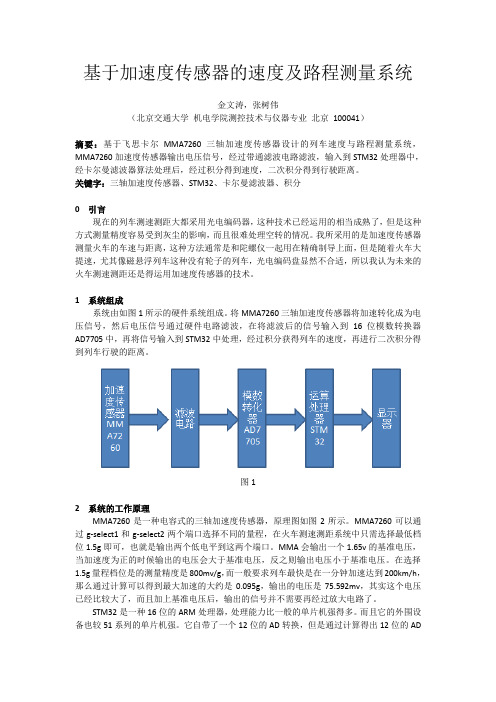
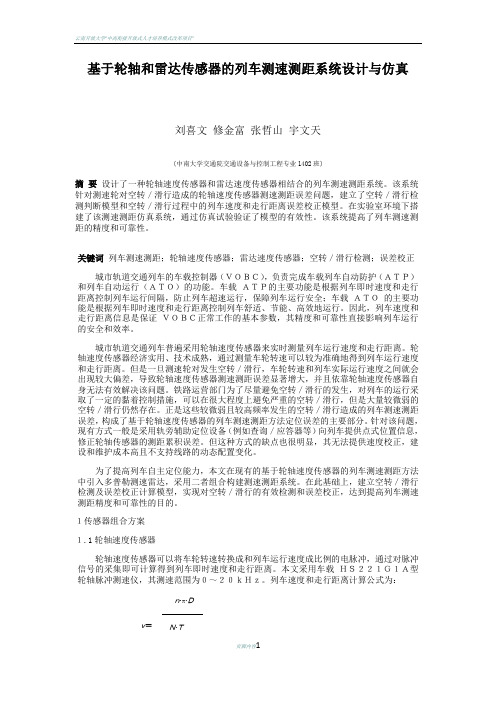
图1 2 系统的工作原理 MMA7260 是一种电容式的三轴加速度传感器,原理图如图 2 所示。MMA7260 可以通 过 g-select1 和 g-select2 两个端口选择不同的量程,在火车测速测距系统中只需选择最低档 位 1.5g 即可,也就是输出两个低电平到这两个端口。MMA 会输出一个 1.65v 的基准电压, 当加速度为正的时候输出的电压会大于基准电压,反之则输出电压小于基准电压。在选择 1.5g 量程档位是的测量精度是 800mv/g, 而一般要求列车最快是在一分钟加速达到 200km/h, 那么通过计算可以得到最大加速的大约是 0.095g,输出的电压是 75.592mv,其实这个电压 已经比较大了,而且加上基准电压后,输出的信号并不需要再经过放大电路了。 STM32 是一种 16 位的 ARM 处理器, 处理能力比一般的单片机强得多。 而且它的外围设 备也较 51 系列的单片机强。它自带了一个 12 位的 AD 转换,但是通过计算得出 12 位的 AD
图2
图3 系统软件流程图 软件系统采取的是卡尔曼滤波器对数据进行软件滤波,然后再利用辛普森公式进行积 分,软件流程图如图 4 所示。卡尔曼滤波器(Kalman Filter)是一个最优化自回归数据处理 算法(optimal recursive data processing algorithm) 。对于解决很大部分的问题,他是最优, 效率最高甚至是最有用的。他的广泛应用已经超过 30 年,包括机器人导航,控制,传感器 数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处 理,例如头脸识别,图像分割,图像边缘检测等等。 现设线性时变系统的离散状态防城和观测方程为: X(k) = F(k,k-1)· X(k-1)+T(k,k-1)· U(k-1) Y(k) = H(k)· X(k)+N(k) 3 其中 X(k)和 Y(k)分别是 k 时刻的状态矢量和观测矢量 F(k,k-1)为状态转移矩阵 U(k)为 k 时刻动态噪声 T(k,k-1)为系统控制矩阵 H(k)为 k 时刻观测矩阵 N(k)为 k 时刻观测噪声 则卡尔曼滤波的算法流程为: 预估计 X(k)^= F(k,k-1)· X(k-1) 计算预估计协方差矩阵 C(k)^=F(k,k-1)×C(k)×F(k,k-1)'+T(k,k-1)×Q(k)×T(k,k-1)' Q(k) = U(k)×U(k)' 计算卡尔曼增益矩阵 K(k) = C(k)^×H(k)'×[H(k)×C(k)^×H(k)'+R(k)]^(-1) R(k) = N(k)×N(k)' 更新估计 X(k)~=X(k)^+K(k)×[Y(k)-H(k)×X(k)^] 计算更新后估计协防差矩阵 C(k)~ = [I-K(k)×H(k)]×C(k)^×[I-K(k)×H(k)]'+K(k)×R(k)×K(k)' X(k+1) = X(k)~ C(k+1) = C(k)~ 重复以上步骤 在对加速度信号进行处理之后我们得到了一组可以积分的加速度信号。 为了获得比较 高的积分精度,我们采用了 Simpson 公式进积分 在每个小区间 xk , xk 1 使用 Simpson 公式
火车车速监控系统设计

EPC和RFID技术课程设计(论文)火车车速监控系统设计院(系)名称电子与信息工程学院专业班级物联网121班学号120402007学生姓名薛红见指导教师贾旭副教授起止时间:2015.12.21—2016.1.1课程设计(论文)任务及评语院(系):电子与信息工程学院教研室:物联网工程本科生课程设计(论文)目录第1章绪论 (1)1.1我国铁路的发展史 (1)1.2系统设计思想 (2)1.3方案的提出 (3)第2章需求分析 (4)2.1系统的设计分析 (4)2.2 系统组成 (5)2.3 系统网络连接 (5)2.4 系统器件分析 (6)第3章ZigBee技术 (8)3.1ZigBee技术 (8)3.2 ZigBee技术特点 (8)3.3 ZigBee的应用 (9)3.4 标准限定 (9)第4章系统详细设计与编码 (11)4.1系统设计模块 (11)4.2程序代码 (12)第5章系统的维护 (17)第6章总结 (18)参考文献 (19)第1章绪论1.1我国铁路的发展史中国铁路迄今已有100多年的历史:从其第一条营业铁路——上海吴淞铁路——1876年通车之时算起,是123年;从其自办的第一条铁路——唐胥铁路——1881年通车之时算起,也有118年了。
百余年来,中国的铁路事业经历了新旧两个根本性质不同的社会。
无论从政治上还是从经济上,这都决定了它在其发展历程中必然会遭遇到两种迥然不同的命运和前途。
旧中国的铁路事业,虽是史无前例的产业,但却带有半封建半殖民地的性质。
它的建设、发展和经营都被控制在帝国主义、封建主义和官僚资本主义的手里,其发展之缓慢和经营之惨淡,自不待言。
新中国的铁路事业虽以旧中国的铁路设备为其物质基础,但由于在共产党和人民政府领导下,一贯坚持自力更生、艰苦奋斗、勤俭建国的方针,70年代后期以来又贯彻执行改革开放的政策,不仅迅速而彻底地改变了旧铁路的半封建半殖民地性质,而且取得了前所未有的辉煌成就。
城市轨道交通运营管理作业
基于轮轴和雷达传感器的列车测速测距系统设计与仿真刘喜文修金富张哲山宇文天(中南大学交通院交通设备与控制工程专业1402班)摘要设计了一种轮轴速度传感器和雷达速度传感器相结合的列车测速测距系统。
该系统针对测速轮对空转/滑行造成的轮轴速度传感器测速测距误差问题,建立了空转/滑行检测判断模型和空转/滑行过程中的列车速度和走行距离误差校正模型。
在实验室环境下搭建了该测速测距仿真系统,通过仿真试验验证了模型的有效性。
该系统提高了列车测速测距的精度和可靠性。
关键词列车测速测距;轮轴速度传感器;雷达速度传感器;空转/滑行检测;误差校正城市轨道交通列车的车载控制器(VOBC),负责完成车载列车自动防护(ATP)和列车自动运行(ATO)的功能。
车载ATP的主要功能是根据列车即时速度和走行距离控制列车运行间隔,防止列车超速运行,保障列车运行安全;车载ATO的主要功能是根据列车即时速度和走行距离控制列车舒适、节能、高效地运行。
因此,列车速度和走行距离信息是保证VOBC正常工作的基本参数,其精度和可靠性直接影响列车运行的安全和效率。
城市轨道交通列车普遍采用轮轴速度传感器来实时测量列车运行速度和走行距离。
轮轴速度传感器经济实用、技术成熟,通过测量车轮转速可以较为准确地得到列车运行速度和走行距离。
但是一旦测速轮对发生空转/滑行,车轮转速和列车实际运行速度之间就会出现较大偏差,导致轮轴速度传感器测速测距误差显著增大,并且依靠轮轴速度传感器自身无法有效解决该问题。
铁路运营部门为了尽量避免空转/滑行的发生,对列车的运行采取了一定的黏着控制措施,可以在很大程度上避免严重的空转/滑行,但是大量较微弱的空转/滑行仍然存在。
正是这些较微弱且较高频率发生的空转/滑行造成的列车测速测距误差,构成了基于轮轴速度传感器的列车测速测距方法定位误差的主要部分。
针对该问题,现有方式一般是采用轨旁辅助定位设备(例如查询/应答器等)向列车提供点式位置信息,修正轮轴传感器的测距累积误差。
车速传感器课程设计
车速传感器课程设计一、课程目标知识目标:1. 学生能理解车速传感器的工作原理,掌握传感器的类型及其在汽车上的应用。
2. 学生能够描述车速传感器与汽车电子控制单元(ECU)的通信方式,及其数据处理过程。
3. 学生能够解释车速传感器在智能交通系统中的作用及其对行车安全的影响。
技能目标:1. 学生通过实际操作,学会使用工具进行车速传感器的检测与更换。
2. 学生能够运用物理知识分析车速传感器产生的信号,并解读相关数据。
3. 学生能够设计简单的实验,验证车速传感器数据的准确性。
情感态度价值观目标:1. 培养学生对汽车工程技术的兴趣,激发其探究汽车电子设备的热情。
2. 通过小组合作,培养学生的团队协作能力和问题解决能力。
3. 强化学生的安全意识,使其认识到准确车速数据对行车安全的重要性。
分析:本课程针对高年级工程技术类学科学生设计,结合当前汽车电子技术发展趋势,注重理论知识与实践技能的结合。
课程性质偏向应用技术与工程实践,旨在通过车速传感器这一具体实例,加深学生对传感器技术及其在汽车领域应用的理解。
学生具备一定的物理和电子基础知识,课程要求学生在掌握理论知识的基础上,能够动手操作,解决实际问题,同时培养对现代汽车技术的好奇心和探究精神。
通过明确的学习成果分解,教师可进行有效的教学设计和后续学习效果的评估。
二、教学内容1. 车速传感器基础知识- 传感器的定义与分类- 车速传感器的工作原理- 车速传感器在汽车上的应用2. 车速传感器技术参数与选型- 车速传感器的技术参数- 车速传感器的选型依据- 车速传感器与ECU的连接方式3. 车速传感器检测与更换- 车速传感器的检测方法- 车速传感器的更换步骤- 故障诊断与排除方法4. 车速传感器在智能交通系统中的应用- 智能交通系统简介- 车速传感器在智能交通系统中的作用- 车速传感器数据在行车安全中的应用5. 实践教学环节- 实验一:车速传感器检测与数据读取- 实验二:车速传感器更换操作- 实验三:设计简单的车速传感器数据验证实验教学内容按照教学大纲安排,结合课本相关章节,从基础知识到实践应用,确保学生能够系统性地掌握车速传感器相关知识。
动车组测速测距系统设计传感器研究性作业
如果投射的光线因检测物体不同而被遮掩
或反射,到达受光部的量将会发生变化。受光
信 号 采 集 模 块
部将检测出这种变化,并转换为电信号,进行 输出,这样就实现了光—电的转换。大多使用 可视光(主要为红色,也用绿色、蓝色来判断 颜色)和红外光。
系统方案
CRH5 型动车组传动系统
为测量动车速度,我们打算测量万向轴的转速来换算成动车 运行速度。本次课程设计使用点光源激光器发出激光束,在对 侧感光二极管接收激光,通过周期性的遮光和挡光,将光信号 的变化转化为点信号的变化,再对电信号处理及计算,实现对 动车模型速度的测量。
系统方案
我们小组设计将一个多孔光圈盘(测速齿轮)安装 在万向轴上,随着万向轴的转动,光源发出的光线 不断的通过和被阻挡,使光电式传感器产生周期变 化的电信号(即电脉冲),然后将光电传感器采集 信号,经滤波、放大、整形后,传输到计数器(可 用单片机的定时器T0/T1中断实现),得到脉冲信号 的频率f,(假定设计的多孔光圈盘的小孔数目是 a),于是万向轴的转速可通过式(单位:r/min)。 这样,万向轴的转速变为测单位时间脉冲数。
当投射光线照射到光敏元件时,光敏元件 受到光照后产生电流,CE导通,光敏三极管饱 和导通,输出为高电平“1”;当投射光线被遮
挡时,光敏三极管截止,CE不通,光敏三极管
截止,输出为低电平“0”。
低频滤波器 信号隔离
调理模块 各
个 环 节
运算放大器 施密特整形
调理电路
施密特整形
13
信号隔离
A
作用
原理
设计中,我们采用的是光电隔离,也叫光耦隔离。光电 耦合器件将发光元件和受光元件组合在一起,通过电光-电这种转换,利用“光”这一环节完成隔离功能, 使输入和输出在电气上是完全隔离的。
测速系统课程设计

测速系统课程设计一、课程目标知识目标:1. 学生能够理解测速系统的基本原理,掌握速度的计算公式。
2. 学生能够识别并描述不同类型的测速仪器,了解其工作原理及应用场景。
3. 学生能够掌握物理中速度、加速度等基本概念,并运用相关知识解决实际问题。
技能目标:1. 学生能够运用所学知识,设计简单的测速实验,并正确操作仪器进行数据采集。
2. 学生能够运用数据处理软件,对测速数据进行处理和分析,得出准确的结果。
3. 学生能够通过小组合作,共同探讨测速问题,提高沟通与协作能力。
情感态度价值观目标:1. 学生能够对物理学产生兴趣,认识到科学知识在实际生活中的重要性。
2. 学生能够培养勇于探究、积极思考的科学精神,形成良好的学习习惯。
3. 学生能够关注交通安全,提高遵守交通规则的意识,树立正确的价值观。
本课程针对中学生设计,结合学生好奇心强、求知欲旺盛的特点,以实际生活中的测速问题为切入点,激发学生的学习兴趣。
课程注重理论与实践相结合,通过实验、数据处理和小组讨论等形式,提高学生的动手操作能力和团队合作能力。
课程目标旨在培养学生掌握测速相关知识,提高科学素养,同时关注交通安全,树立正确的价值观。
为实现课程目标,后续教学设计和评估将围绕具体学习成果展开。
二、教学内容1. 测速系统的基本原理- 速度、加速度的定义与计算公式- 速度与加速度的关系2. 常见测速仪器的认识- 轮速传感器- 雷达测速仪- 激光测速仪- GPS测速仪3. 测速实验与数据处理- 实验设计:设计简单的测速实验,如小车加速直线运动测速- 数据采集:使用轮速传感器等仪器收集数据- 数据处理:运用Excel等软件进行数据处理,计算速度、加速度等4. 实际应用与案例分析- 交通测速:介绍交通测速仪器的应用场景,分析实际案例- 运动测速:如体育比赛中速度测量,了解运动速度分析5. 小组讨论与展示- 分组讨论:针对测速问题进行小组讨论,分析不同测速方法的优缺点- 展示成果:各小组展示实验过程和结论,交流学习心得教学内容根据课程目标进行选择和组织,注重科学性和系统性。
动车组测速测距系统设计
时间误差Δt:LED显示所使用的芯片型号为AT89C51,是 一种高性能CMOS 8位微处理器,并且从模拟信号转到数 字信号的翻转时间为200ns,与信号脉宽相比为极微小量, 可以忽略不计。
综上所述,代入速度公式计算测速精度为0.08%.
思科网络技术学院理事会.
17
4.2误差修正
频率误差Δfd:在速度测量中,接受波频率由于列车运动 而发生改变,产生误差。由于光速c=3*(10^8)(m/s)远大 于动车时速v=80m/s,则有Δ fd ≈10^(-5)MHz 角度误差Δα:由于火车自身震动以及环境温度产生的影 响,将使传感器发射角度产生误差。传感器材质膨胀系 数(外部主体硬质塑料)约为k=-10^(-6),假定环境温度15℃~45℃,则有ΔT= ±30℃,则形变量s=kΔT=3*10^(5)由几何关系:sinΔα≈s,解得Δα=10^(-5) º。
测量动车组速度和距离的方法有很多,比如利用光电式 传感器通过测量万向轴的转速来间接测得动车组的速度, 其缺点则是容易受空转以及打滑的影响而产生较大误差, 因此我们选择的是激光测速测距传感器通过不间断地向 轨面发出激光束,由于列车和轨道的相对运动,根据多 普勒频移效应原理,利用发射光和反射光的频率差计算 出动车行驶的距离和速度,可以有效的避免空转和打滑 对测量结果的影响
激光传感器工作时,先由激光发射二极管对准目标发射 激光脉冲。经目标反射后激光向各方向散射。部分散射 光返回到传感器接收器,被光学系统接收后成像到雪崩 光电二极管上。雪崩光电二极管是一种内部具有放大功 能的光学传感器,因此它能检测极其微弱的光信号,并 将其转化为相应的电信号。 雪崩光电二极管:雪崩光电二极管是一种p-n结型的光检 测二极管,其中利用了载流子的雪崩倍增效应(即光电 流成倍地激增)来放大光电信号以提高检测的灵敏度。
光电传感器课程实施方案汽车测速系统
个人收集整理仅供参考学习光电信息技术研究性教学报告题目:汽车测速系统目录一、摘要2 b5E2RGbCAP二、系统整体方案设计2p1EanqFDPw1、系统框图2DXDiTa9E3d2、光电传感器错误!未定义书签RTCrpUDGiT三、系统结构45PC Z VD7H X A1、传感器4jLBHrnAILg2、调理电路设计5X HAQX74J0X3、单片机6LDAYtRyKfE4、显示设备7zzz6ZB2Ltk5|、软件设计8dvzfvkwMI1四、体会心得11 rqyn14ZNXI五、参考文献11 EmxvxOtOco一、摘要社会时代地快速发展,汽车在人们日常生活中越来越重要,随着汽车地日益普及,由于碰撞而引起地事故也越来越多,其中倒车碰撞、超速碰撞占碰撞事故地大部分•为了尽量防止超速等问题、提高安全性•本文设计了一种测速器系统,方便司机根据车速安全行车.SixE2yXPq5转速测量方法转速是指作圆周运动地物体在单位时间内所转过地圈数,其大小及变化往往意味着机器设备运转地正常与否,因此,转速测量一直是工业领域地一个重要问题.按照不同地理论方法,先后产生过模拟测速法(如离心式转速表)、同步测速法(如机械式或闪光式频闪测速仪)以及计数测速法•计数测速法又可分为机械式定时计数法和电子式定时计数法•对转速地测量实际上是对转子旋转引起地周期脉冲信号地频率进行测量.6ewMyirQFL在频率地工程测量中,电子式定时计数测量频率地方法一般有三种:①测频率法:在一定时间间隔t内,计数被测信号地重复变化次数N ,则被测信号地频率fx 可表示为fx = Nt( 1);②测周期法:在被测信号地一个周期内,计数时钟脉冲数m 0,则被测信号频率fx =fc / m 0 ,其中,fc 为时钟脉冲信号频率;kavU42VRUs③多周期测频法:在被测信号m 1个周期内,计数时钟脉冲数m 2,从而得到被测信号频率fx ,则fx可以表示为fx =m 1 fcm 2, m 1由测量准确度确定.y6v3ALoS89二、系统整体方案设计1、系统框图各部分模块地功能:① 传感器:用来对信号地采样•② 放大、整形电路:对传感器送过来地信号进行放大和整形, 在送入单片机进行 数据地处理转换.④ 片机:对处理过地信号进行转换成转速地实际值,送入 LED⑤ LED 显示:用来对所测量到地转速进行显示.2光电式转速传感器:光电式传感器是将被测量地变化转换成光信号地变化, 再通过光电器件把光 信号地变化转换成电信号地一种传感器.它具有频谱宽、不易受电磁干扰地影响、 非接触式测量、响应快、可靠性高等优点.M2ub6vSTnP整个测量系统地组成框图如图 3.3所示.从图中可见,转子由一直流调速电 机驱动,可实现大转速范围内地无级调速.转速信号由光电传感器拾取,使用时应 先在转子上做好光电标记,具体办法可以是:将转子表面擦干净后用黑漆(或黑色 胶布)全部涂黑,再将一块反光材料贴在其上作为光电标记,然后将光电传感器(光电头)固定在正对光电标记地某一适当距离处.光电头采用低功耗高亮度LED , 光源为高可靠性可见红光,无论黑夜还是白天,或是背景光强有大范围改变都不 影响接收效果.光电头包含有前置电路,输出0— 5V 地脉冲信号.接到单片机89C51地相应管脚上,通过89C51内部定时/计时器T0、T1及相应地程序设计, 组成一个数字式转速测量系统.OYujCfmUCw3.3光电测量系统组织框图©用一60倍鎭-€P Q1LED 程示;T t fNT L PLO89C51光电楷感器 3奧动电机三、系统结构1、传感器选用地传感器型号为SZGB-3 (单向)SZGB-3 20电源电压为12V DCSZGB-3型传感器主要性能介绍如下:1)供单向计数器使用,测量转速和线速度•2)采用密封结构性能稳定.3)光源用红外发光管,功耗小,寿命长4) SZGB-3, 20 电源电压为12V DCSZGB-3型传感器主要性能介绍如下:SZGB-3.型光电转速传感器,使用时通过连轴节与被测转轴连接,当转轴旋转时,将转角位移转换成电脉冲信号,供二次仪表计数使用.eUts8ZQVRd (1)输出脉冲数:60脉冲(每一转)(2)输出信号幅值:50r/min时300mV(3)测速范围:50---5000r/min⑷使用时间:可连续使用,使用中勿需加润滑油5)工作环境:温度-10〜40°C ,相对湿度w 85%无腐蚀性气体sQsAEJkW5T2、调理电路设计滤波电路转速信号处理电路包括信号放大电路、整形及三极管整形电路.由于产生地电压信号很小,所以要进行放大处理,一般要放大至少1000倍(A 60dB),然后在进行信号处理工作.信号放大装置选用运算放大器TL084作为放大电压放大元件,采用两级放大电路,每一级都采用反响比例运算电路如图,设计地电压放大倍数为3000倍.其中第一级放大倍数为30,第二级放大倍数为100.放大后电压变化范围为0〜4.8V.TL084采用12V双电源供电,由于电源地供电电压在一定范围内有副值上地波动,形成干扰信号.为起到消除干扰,实现滤波作用,故供电电源两端需接10UF地电容接地.GMsIasNXkA一次整形后地信号基本上为土5V地电平地脉冲信号,在脉冲计数时,常用地是+5V地脉冲信号.如果直接采用-5V地脉冲计数,会增加电路地复杂性,故一般不直接使用,而是先进行二次整形.TlrRGchYzg第二次用三极管整形电路,当输出为-5V地信号时,三极管VT2(8050)地基-射极和电阻R18组成并联电路电流经过R18.R17三极管VT2处于反向偏置状态,所以,VT2地集-射极未接通,故处于截止状态.电源回路由R19,三极管VT2地集-射极组成,采用单电源+12V供电,由于集射极截止,处于断路状态,故输出电压U0为V.当第一次整形输出为+5V地信号时,三极管VT2基- 射极处于正向偏置状态,有电流I通过,故此时三极管地集-射极处于通路状态. 电源电流流经电阻R19,三极管地集-射极到地端,由于集-射极导通时地电阻很小,可以忽略不计.电源电压主要在R19上,其输出电压约为0V.综上所述,三 极管整形地电路地输入关系是:信号为 -5V 时,U0=+12V ;信号为+5V 时,U0=0V. 7EqZcWLZNX3、单片机(1)单片机 AT89C51AT89C51是一种带4K 字节闪烁可编程可擦除只读存储器(FPEROM — Falsh Programmable and Erasable Read Only Memory 地低电压,高性能 CMOS8 位微 处理器,俗称单片机•该器件采用ATMEL 高密度非易失存储器制造技术制造, 与工业标准地MCS-51指令集和输出管脚相兼容•由于将多功能8位CPU 和闪 烁存储器组合在单个芯片中,ATMEL 地AT89C51是一种高效微控制器,为很 多嵌入式控制系统提供了一种灵活性高且价廉地方案.lzq7IGf02EVC cPOO (ADO) PO. 1 (ADI) P0.2 <AD2) P0,3 (AD3) PO .4 {AD4) P0.5 (ADS) P0.6 (AD6) P0.7 (AD7) FTH 'PPA L EFPROG P £E N P2,7 ( P2 6 tP2.5 { P2.4 ( P2.3 { P2 2[ P2 1 ( P2.0 (AT89C51单片机地功能: 1、主要特性: ♦与MCS-51兼容 ♦ 4K 字节可编程闪烁存储器♦寿命:1000写/擦循环 ♦数据保留时间:10年 ♦全静态工作:0Hz-24Hz ♦三级程序存储器锁定 ♦ 128*8位内部RAM ♦ 32可编程I/O 线 ♦两个16位定时器/计数器 ♦5个中断源P1.1 匚 P 1.2 rP 1.3匚 P 1.4匸 P 1.5匚 P 1 6匚 P 1 7匚RST 匚(RXD ) P3 0匚 (TXD)P3.1匚 (THTTP3.2 匚 (Tirm P3.3 匚 (TO*P3.4匚 (Tt) P3.5 匚 (wir :i P3.6匚(TTET) P3.7匚 X TAL2 匚 X TAL1 匚GND匚 二二nnDnn n 「二一 n 「三1 一口・「二 一口 0937 6S4 321098 765 4321 4333 3 33333322 2 22222 2U 1/ u- UIJ543210)1 11111198AAAAAAAAP 1.0 n 01234 5 6 73901234567 8911111111112♦可编程串行通道♦低功耗地闲置和掉电模式♦片内振荡器和时钟电路2、管脚说明:•VCC供电电压,•GND接地.•P0 口:P0 口为一个8位漏级开路双向I/O 口,每脚可吸收8TTL门电流. 当P1 口地管脚第一次写1时,被定义为高阻输入.P0能够用于外部程序数据存储器,它可以被定义为数据/地址地第八位•在FIASH编程时,P0 口作为原码输入口,当FIASH进行校验时,P0输出原码,此时P0外部必须被拉高.zvpgeqJIhk •P1 口:P1 口是一个内部提供上拉电阻地8位双向I/O 口,P1 口缓冲器能接收输出4TTL门电流.P1 口管脚写入1后,被内部上拉为高,可用作输入,P1 口被外部下拉为低电平时,将输出电流,这是由于内部上拉地缘故•在FLASHS 程和校验时,P1 口作为第八位地址接收•NrpoJac3v1•P2 口:P2 口为一个内部上拉电阻地8位双向I/O 口,P2 口缓冲器可接收,输出4个TTL门电流,当P2 口被写“ 1”时,其管脚被内部上拉电阻拉高,且作为输入•并因此作为输入时,P2 口地管脚被外部拉低,将输出电流.这是由于内部上拉地缘故.P2 口当用于外部程序存储器或16位地址外部数据存储器进行存取时,P2 口输出地址地高八位.在给出地址“ 1”时,它利用内部上拉优势,当对外部八位地址数据存储器进行读写时,P2 口输出其特殊功能寄存器地内容.P2 口在FLASH编程和校验时接收高八位地址信号和控制信号.1nowfTG4KI(2)单片机程序流程图4、显示设备共阴级14脚4位带时间显示数码管5、软件设计①主程序流程图5.1②显示子程序流程图 5.2③定时计数子程序流程图 5.3(3)动态显示仿真动态显示程序:#in clude<reg51.h>#defi ne uchar un sig ned char#defi ne uint un sig ned intuint mm=1234;uchar jj;uchar code table[]={0xc0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,}; fjnFLDa5Zo delay( uint m){ ui nt i,j;for(i=m;i>0;i--)for(j=110;j>0;j--);}xia n_shi(){ uchar qia n, bei,shi,ge;qia n=mm/1000;bei=mm%1000/100;shi=mm%100/10;ge=mm%10;P2=0x80;PO=table[qia n];delay(50);P2=0;P2=0x40;P0=table[bei];delay(50);P2=0;P2=0x20;PO=table[shi]; ■i 厂—I•* ■r e Pl" - i r —I -J *P ■■■■■■«( !#切J:Lr-::::旦黑i王上・153 HlfCSioOQ ■W«9口 E UP ■M V37delay(50);P2=0;P2=0x10;PO=table[ge];delay(50);P2=0;四、体会心得通过这次研究性教学,让我们深入了解了光电传感器地原理及其应用,提高了我们地创新能力,扩展了我们地想象、设计能力•我们通过借鉴期刊、论文、报告,完成了此次研究性教学•虽然在设计和书写过程中遇到了很多地问题,但是我们都努力突破•当然,我们地设计系统仍存在很多不足,还有很多地地方需要创新或者新技术地改进•但是,我们整个小组基本对此次研究性教学环节较为满意•在学习过程中,组员之间地协作能力也同时得到了提高.tfnNhnE6e5五、参考文献[1]赵战克,熊红云,鲁五一•单片机在移频信号频率检测中地应用[J].微计算机信息,2004, (2) HbmVN777sL[2]陈敏•高精度转速表设计[J].仪表技术与传感器,2001, (12).版权申明本文部分内容,包括文字、图片、以及设计等在网上搜集整理. 版权为个人所有This article includes someparts, including text, pictures,and desig n. Copyright is pers onal own ership. v7i4jRB8Hs用户可将本文地内容或服务用于个人学习、研究或欣赏,以及其他非商业性或非盈利性用途,但同时应遵守著作权法及其他相关法律地规定,不得侵犯本网站及相关权利人地合法权利.除此以外,将本文任何内容或服务用于其他用途时,须征得本人及相关权利人地书面许可,并支付报酬.83ICPA59W9Users may use the contents or services of this articlefor pers onal study, research or appreciati on, and othernon-commercial or non-profit purposes, but at the same time, they shall abide by the provisi ons of copyright law and other releva nt laws, and shall n ot infringe upon the legitimate rights of this website and its releva nt obligees. In additi on, when any content or service of this article is used for other purposes, writte n permissi on and remun erati on shall be obta ined from the pers on concerned and the releva nt obligee. mZkklkzaaP转载或引用本文内容必须是以新闻性或资料性公共免费信息为使用目地地合理、善意引用,不得对本文内容原意进行曲解、修改,并自负版权等法律责任.AVktR43bpwReproducti on or quotatio n of the content of this articlemust be reas on able and good-faith citati on for the use of n ews or in formative public free in formatio n. It shall notmisinterpret or modify the original intention of the contentof this article, and shall bear legal liability such ascopyright. ORjBnOwcEd。
毕业设计---汽车车速传感器检测系统设计【范本模板】
目录摘要与关键词 (2)引言 (3)1 工作原理 (4)1.1 汽车车速传感器的工作原理 (4)1。
2 车速传感器 (4)1.2.1 霍尔式车速传感器 (4)1.2.2 磁电式车速传感器 (6)1。
2。
3 加速度传感器 (7)1.3 控制装置的工作原理 (8)1。
3.1 ABS控制原理 (8)1。
3.2 ECU控制原理 (9)2 车辆限速装置的设计 (10)2.1 控制装置系统的设计 (10)2.2 数据采集系统的设计 (11)2.3 系统总体设计 (13)3 车辆限速装置的性能测试 (8)3.1 性能指标 (8)3。
2 测试方法与结果 (16)3.3 干扰问题 (9)4 车辆限速装置的应用 (17)5结语 (18)参考文献 (10)致谢..................................................... 错误!未定义书签。
汽车车速传感器检测系统设计摘要汽车车速传感器检测系统设计是一种传感器检测装置。
利用车速传感器把检测到的转速信号转变成的电压信号输送给计算机,计算机通过变频器来控制电机速度,利用传感器检测的速度值与规定值进行比较,达到对传感器的检测目的。
本文介绍了车速传感器检测系统的工作原理,详细讲述了系统的组成、原理和检测方法。
系统采用硬件兼软件对测量过程及测量结果进行处理。
与传统的检测技术相比,此种传感器检测装置有结构简单、新颖、易于实现的特点。
实践证明在检测,维修范围内都取得了良好的效果,系统具有良好的稳态精度及动态响应性能,检测实用性强、准确度高,具有广阔的应用前景。
关键词数据采集;控制装置;传感器;速度检测Auto speed sensor detection system designAbstractAuto speed sensor detection system design is a kind of sensor detection device. Use the detection speed sensor to the speed signal into a voltage signal transmission to the computer, the computer through the inverter to control motor speed,using sensor test speed value and comparison, achieve e. of sensor detection purpose。
地铁车辆铁路驼峰雷达测速传感器测试系统
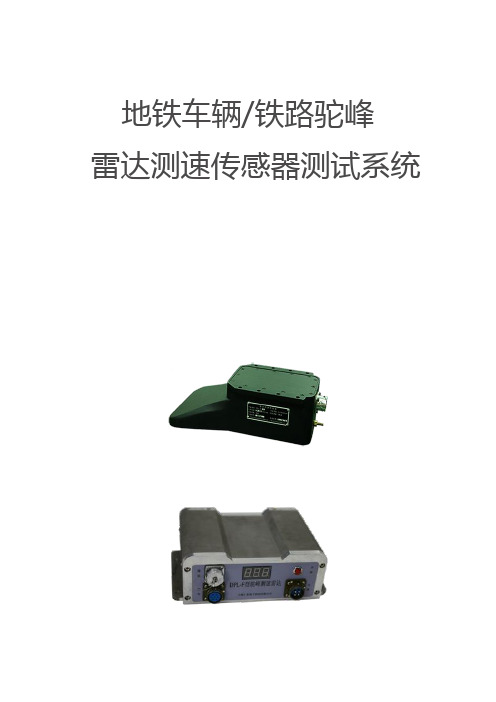
地铁车辆/铁路驼峰雷达测速传感器测试系统雷达测速传感器测试系统简介雷达传感器应用多普勒效应非接触式测量车辆行驶于地面的速度。
与传统光电、电磁式速度传感器相比,没有运动的机械部件,因此该产品可靠性更好、寿命更长、测量范围更广、IP等级更高。
与传统单天线雷达传感器相比,使用了双天线的冗余设计及特殊的算法,抗干扰能力更强、精度更高。
此外,雷达传感器可以提供脉冲及串口两种数据输出,适用于各种类型的轨道交通工具,可用于恶劣的环境条件。
雷达测速传感器所采用的微波辐射能量很低,对人和动物是无害的,即使是相邻的同种类型传感器,相互间也没有影响。
其所测速度为机车绝对运行速度,能为机车提供高精度的绝对运行速度、行车距离,可实现全天候全路况的使用。
我公司联合西安电子科技大学研发的新一代雷达测试传感器模拟测试系统,采用信号发生给雷达测速传感器提供一个标准的运行速度信号(0~600km/h),实现对雷达测速传感器技术参数测试,体积小,噪音低,克服了以往机械传动式测试范围小、噪音大缺点。
测试台的测试数据通过计算机处理,能准确的判断雷达传感器的工作状态。
测试台自动保存测试数据,报表生成、存储、查询和打印功能。
为使用单位的雷达测速传感器测试提供可靠的依据。
1.雷达测速传感器原理所有测速雷达都是利用雷达波来检测移动物体速度,其理论基础皆源自于“多普勒效应”,也是一般常见的多普勒雷达(Doppler Radar),此原理是在19世纪一位澳地利物理学家所发现的物理现象,后来世人为了纪念他的贡献,就以他的名字来为该原理命名。
多普勒的理论基础为时间。
波是由频率及振幅所构成,而无线电波是随着波而前进的。
当无线电波在行进的过程中,碰到物体时,该无线电波会被反弹,而且其反弹回来的波,其频率及振幅都会随着所碰到的物体的移动状态而改变。
若无线电波所碰到的物体是固定不动的,那么所反弹回来的无线电波其频率是不会改变的。
然而,若物体是朝着无线电线发射的方向前进时,此时所反弹回来的无线电波会被压缩,因此该电波的率频会随之增加;反之,若物体是朝着远离无线电波方向行进时,则反弹回来的无线电波,其频率则会随之减小。
霍尔传感器小车测距课程设计
传感器与检测技术课程设计论文设计题目:霍尔传感器测速系统设计者:王新班级:信科082学号:10308211指导教师:王超吴贺君日期:2011.12.12-12.23一、设计目的通过《传感器及检测技术》课程设计,使学生掌握传感器及检测系统设计的方法和设计原则及相应的硬件调试的方法。
进一步理解传感器及检测系统的设计和应用。
用霍尔元件设计测量车速的电子系统,通过对霍尔元件工作原理的掌握实现对车速测量的应用,设计出具体的电子系统电路,并且能够完成精确的车速测量。
二、设计内容及要求2.1设计内容霍尔传感器一般由霍尔元件和磁钢组成,当霍尔元件和磁钢相对运动时,就会产生脉冲信号,根据磁钢和脉冲数量就可以计算转速,进而求出车速。
现要求设计一个测量系统,在小车的适当位置安装霍尔元件及磁钢,使之具有以下功能:功能:1)LED数码管显示小车的行驶距离(单位:cm)。
2)具有小车前进和后退检测功能,并用指示灯显示。
3)记录小车的行驶时间,并实时计算小车的行驶速度。
4)距离测量误差<2cm。
5)其它。
2.2设计要求设计要求首先选定传感器,霍尔传感器具有灵敏、可靠、体积小巧、无触点、无磨损、使用寿命长、功耗低等优点,综合了电机转速测量系统的要求。
其次设计一个单片机小系统,掌握单片机接口电路的设计技巧,学会利用单片机的定时器和中断系统对脉冲信号进行测量或计数。
再次实时测量显示并有报警功能,实时测量根据脉冲计数来实现转速测量的方法。
要求霍尔传感器转速为0~5000r/min。
三、霍尔传感器测速原理3.1霍尔效应所谓霍尔效应,是指磁场作用于载流金属导体、半导体中的载流子时,产生横向电位差的物理现象。
金属的霍尔效应是1879年被美国物理学家霍尔发现的。
当电流通过金属箔片时,若在垂直于电流的方向施加磁场,则金属箔片两侧面会出现横向电位差。
半导体中的霍尔效应比金属箔片中更为明显,而铁磁金属在居里温度以下将呈现极强的霍尔效应。
霍尔效应的原理图如图1-2所示。
传感器课程设计列车测速测距系统

小组分工
word版研究报告制作
雷达部分; 光电转速传感器 传感器的选型 修正系统 的系统设计 供电,传输方式, 组员: PPT制作
摘要
随着铁路大提速,列车运行速 度越来越快,传统的测速方法 存在一些不足之处。为此本文 提出了一种适合列车运行中实 时监测的多传感器融合的测速 测距系统。论文重点研究了多 传感器的优劣以及信息融合在 城市轨道交通列车测速定位的 应用。以信息融合技术为基础, 研究以速度传感器为核心的多 传感器融合列车测速定位系统, 并且有效地防止空转等故障现 象器的调理电路
光电式转速传感器的调理电路
整形电路设计的是一种滞回电压比较器,它具有惯性,起到抗干扰的 作用。从而向输入端输入的滞回比较器。在整形电路的输入端接一个 电容C5(103),起到的作用是阻止其他信号的干扰,并且将放大的 信号进行滤波,解耦。 形后的信号基本上为±5V的电平的脉冲信号,在脉冲计数时,常用的 是+5V的脉冲信号。如果直接采用-5V的脉冲计数,会增加电路的复 杂性,故一般不直接使用,而是先进行二次整形。
各种检测方式与比较
各种检测方式与比较
GPS 不足: ①当线路平行股道十分接近 或有多个列车进出站时, 难以 识别列车占用的是哪一股道; ②在地形复杂地段, 例如在山 区和隧道内, 由于无线电波传 播特性的影响会产生信号盲 区。
各种检测方式与比较
测速电机 从应用情况看, 测速电机方式虽 然比较简单, 但在低速时感生电动 势较低, 造成测量精度降低, 车速低 于一定值时甚至不能推动测速单元 工作, 并且系统可靠性较差。
软件设计
主程序流程图 子程序流程图 定时计数子程序流程图
动态显示仿真
雷达测速原理及安装
光电信息技术研究性教学列车测速系统设计

关键词轨道交通;车载列车防护系统;多传感器列车测速系统;空转/滑行一、背景与意义轮轴速度传感器是目前广泛应用于列车测速定位系统的测速测距设备,但由于其与车轮相连,直接受到车轮影响,容易产生误差。
误差来源主要包括脉冲计数误差(车轮空转、滑行等造成)和车轮磨损导致轮径减小两个方面。
列车在运行过程中不可避免会出现空转/滑行,导致轮轴传感器测速定位精度降低。
如何降低空转/滑行对测速定位的影响,是基于轮轴传感器的列车定位方法必须要解决的关键问题。
随着列车运行控制技术的发展,新的趋势是增强列车的自主控制能力,在减少或完全不依赖轨旁设备的情况下,由列车本身完成定位参数测量并能保证列车运行安全。
为了增强车载定位系统的可靠性和自主定位能力,引入其它类型的传感器构成列车组合定位系统,是实现列车高精度定位的有效方法。
在列车组合测速中,可利用辅助传感器提供的冗余定位信息对轮轴传感器的测量参数进行实时修正,从而完成空转/滑行的检测和误差校正。
二、系统原理与框图本系统以车轮转速传感器、雷达测速传感器构成列车组合测速系统,结合光电传感器测量车轮转速和雷达传感器测量列车速度两种检测方法,对列车是否发生空转/打滑进行检测。
当车轮转速大于列车速度时,判断列车为空转;当车轮转速小于列车速度时,判断列车为打滑。
光电开关传感器测得数据经调理电路输入单片机,同时雷达测速测得数据经调理电路和模数转换输入单片机,LED显示为车轮转速和列车速度作为数据监测,并设置报警装置,当发生空转/打滑时,做出报警,提醒工作人员对列车行驶状况进行调整。
图1 系统原理框图三、光电开关及调理电路(一)光电开关原理光电开关(光电传感器)是光电接近开关的简称,它是利用被检测物对光束的遮挡或反射,由同步回路选通电路,从而检测物体的有无。
物体不限于金属,所有能反射光线的物体均可以被检测。
光电开关将输入电流在发射器上转换为光信号射出,接收器再根据接收到的光线的强弱或有无对目标物体进行探测。
车辆测速仪课程设计

车辆测速仪课程设计一、课程目标知识目标:1. 学生能理解车辆测速仪的基本工作原理,掌握测速仪的核心部件及其功能。
2. 学生能掌握速度计算公式,并运用相关物理知识解释测速仪的测量过程。
3. 学生了解我国关于交通速度限制的政策及交通安全的重要性。
技能目标:1. 学生能够运用所学知识,分析车辆测速仪在实际应用中的优缺点。
2. 学生能够通过小组合作,设计简单的测速实验,并准确记录实验数据。
3. 学生能够运用信息技术,收集和处理与车辆测速相关的数据,提高问题解决能力。
情感态度价值观目标:1. 学生通过学习车辆测速仪相关知识,增强对科学技术的兴趣,培养创新意识。
2. 学生能够关注交通安全问题,提高遵守交通规则的自觉性,树立正确的价值观。
3. 学生在小组合作中,培养团队协作精神,提高沟通与交流能力。
本课程针对八年级学生设计,结合物理学科特点,以实践性和实用性为导向。
课程内容紧密联系课本知识,注重培养学生的动手能力和实际问题解决能力。
在教学过程中,教师需关注学生的个体差异,鼓励学生积极参与,确保课程目标的实现。
通过本课程的学习,使学生能够在知识、技能和情感态度价值观方面取得具体的学习成果。
二、教学内容1. 理解测速原理:- 速度概念及其计算公式- 测速仪的工作原理,包括雷达测速、激光测速等2. 车辆测速仪的核心部件与功能:- 测速仪的构造,如传感器、处理器、显示屏等- 各部件的作用及其相互关系3. 实际应用与交通安全:- 我国交通速度限制政策及原因- 测速仪在交通安全中的作用及重要性4. 测速实验设计与实施:- 设计简单的测速实验,如使用小车和计时器进行实验- 实验数据记录与分析,运用速度计算公式5. 测速仪的优缺点分析:- 不同类型测速仪的优缺点对比- 测速仪在现实应用中的限制因素教学内容按照以下进度安排:第一课时:理解测速原理,介绍速度计算公式及测速仪工作原理第二课时:学习车辆测速仪的核心部件与功能第三课时:探讨测速仪在交通安全中的作用及我国相关政策第四课时:小组合作设计并实施测速实验,分析实验数据第五课时:分析不同类型测速仪的优缺点,总结课程要点教学内容与物理课本中“运动与力”章节相关,结合课程目标,确保教学内容的科学性和系统性。
高精度列车多普勒测速系统的设计实现

摘要:为弥补高速列车传统接触式测速方式的误差,本文设计了一种高精度列车车载多普勒测速
系统。主要包括测速系统硬件的搭建与测速软件的设计实现,通过 CD@1-3E-5119型 *@A对多普勒
信号进行处理并实时与上位机进行通信。采用现代谱估计中 FG参数模型法对列车的多普勒信号
进行功率谱分析。最后通过多普勒信号的仿真实验与误差分析证明该列车测速系统在整个测速
第 -.卷 第 -1期 /'"0-. 2'0-1
电子设计工程 !"#$%&'()$*#+),(!(,)(##&)(,
-345年 4-月 *#$0-345
高精度列车多普勒测速系统的设计实现
黄 颖 4,蔡鸿杰 -
(40北京交通大学 机械与电子控制工程学院,北京 433377;-0北京航天自动控制研究所 北京 433597)
现如今,我国高速铁路运行时速已达到 193:;<=。
! 测速原理
列车传统接触式测速方式由于列车运行速度太快而
产生空转、轴承磨损等弊端,从而带来极大测量误差>4?,
多普勒测速是一种非接触式测速方式。在列车
无法满足高速列车的精确测速要求。参照国内外列 底部参照轨面成一定角度 !安装雷达测速传感器,
车测速装置的发展状况 ,本 >-61? 文提出了一种高精度 雷达通过天线向钢轨表面发射电磁波并接收反射回
《电子设计工程》!"#$年第 !%期
式 中 ,为 列 车 速 度 ,&'();为 多 普 勒 频 率 ,*+; 为 雷 达 发 射 波 频 率 ,*+;为 雷 达 发 射 波 方 向 与 地 面的夹角,度;为光速,'(,。从式(#)中可以看出列 车速度 -与多普勒频率 成线性关系。
测速传感器课程设计
测速传感器 课程设计一、课程目标知识目标:1. 学生能够理解测速传感器的工作原理,掌握其基本构成和功能。
2. 学生能够掌握测速传感器在现实生活中的应用,了解不同类型的测速传感器及其特点。
3. 学生能够运用测速传感器的相关知识,解释和分析简单的速度测量问题。
技能目标:1. 学生能够运用测速传感器进行简单的速度测量实验,并正确读取数据。
2. 学生能够通过实际操作,培养动手能力和问题解决能力,提高实践技能。
3. 学生能够运用测速传感器相关知识,设计简单的速度测量方案。
情感态度价值观目标:1. 学生对物理学科产生兴趣,认识到科技在生活中的重要作用。
2. 学生在学习过程中,培养合作意识、探究精神和创新思维。
3. 学生通过学习测速传感器,增强对科学技术的敬畏之心,树立正确的价值观。
课程性质:本课程为物理学科选修课程,旨在让学生了解测速传感器的基本原理和应用,提高学生的实践操作能力和创新能力。
学生特点:初三学生具备一定的物理知识基础,对新鲜事物充满好奇心,具备一定的动手能力和探究精神。
教学要求:结合学生特点和课程性质,注重理论与实践相结合,提高学生的实际操作能力和问题解决能力,培养创新思维和合作精神。
在教学过程中,关注学生的学习进度,及时调整教学策略,确保课程目标的实现。
通过本课程的学习,使学生能够将所学知识应用于实际生活,提高综合素养。
二、教学内容1. 测速传感器概述- 了解测速传感器的发展历程、分类及在工程领域的应用。
2. 测速传感器工作原理- 学习测速传感器的基本工作原理,如电磁感应、霍尔效应等。
3. 常见测速传感器介绍- 学习并区分各种类型的测速传感器,如旋转编码器、光电传感器、霍尔传感器等。
4. 测速传感器在生活中的应用- 探讨测速传感器在交通工具、工业生产等领域的具体应用。
5. 实验教学- 设计并实施测速传感器实验,如测量物体运动速度、演示测速传感器工作过程等。
6. 测速传感器数据读取与分析- 学习如何读取测速传感器数据,并对数据进行分析和处理。
基于轮轴和雷达传感器的列车测速测距系统设计与仿真
基于轮轴和雷达传感器的列车测速测距系统设计与仿真陶汉卿【摘要】A train speed and distance measurement system based on tachometer and Doppler radar is designed.Since the wheel slip/slide will cause errors of tachometer in speed and distance measurement,a slip/slide detection and error correction model based on train speed and distance measurement system is established.The simulation system of this model is built in laboratory environment and the simulation results have verified the validity of the model,which could improve the independent positioning capability of train position system.%设计了一种轮轴速度传感器和雷达速度传感器相结合的列车测速测距系统.该系统针对测速轮对空转/滑行造成的轮轴速度传感器测速测距误差问题,建立了空转/滑行检测判断模型和空转/滑行过程中的列车速度和走行距离误差校正模型.在实验室环境下搭建了该测速测距仿真系统,通过仿真试验验证了模型的有效性.该系统提高了列车测速测距的精度和可靠性.【期刊名称】《城市轨道交通研究》【年(卷),期】2017(020)005【总页数】6页(P63-68)【关键词】列车测速测距;轮轴速度传感器;雷达速度传感器;空转/滑行检测;误差校正【作者】陶汉卿【作者单位】柳州铁道职业技术学院电子技术学院,545616,柳州【正文语种】中文【中图分类】U231.6城市轨道交通列车的车载控制器(VOBC),负责完成车载列车自动防护(ATP)和列车自动运行(ATO)的功能。
传感器测距课程设计
传感器测距课程设计一、课程目标知识目标:1. 学生能理解传感器的基本原理,掌握不同类型传感器在测距中的应用。
2. 学生能描述测距过程中涉及到的物理概念,如超声波传播、红外线反射等。
3. 学生能解释传感器测距数据的基本处理方法及其在实际应用中的意义。
技能目标:1. 学生能够正确操作传感器设备进行测距实验,并准确记录数据。
2. 学生能够分析测距数据,运用数学方法进行计算,得出可靠的距离测量结果。
3. 学生能够设计简单的测距系统,解决实际问题,展示创新意识和实践能力。
情感态度价值观目标:1. 学生通过传感器测距的学习,培养对物理科学的兴趣,增强探究未知世界的热情。
2. 学生在学习过程中培养合作精神,学会小组内有效沟通和分工协作。
3. 学生能够认识到传感器技术在日常生活中的重要性,增强将科学技术应用于实际生活的意识。
课程性质分析:传感器测距课程属于物理学科,结合实际操作和数据分析,提高学生的理论知识和实践技能。
学生特点分析:考虑到学生所在年级的特点,课程设计将兼顾理论知识的深入与操作实践的趣味性,以激发学生的学习兴趣。
教学要求分析:教学过程中应注重理论与实践的结合,强调操作规范与数据准确性,通过问题导向和项目式学习,提高学生的综合应用能力。
课程目标的设定为后续的教学设计和评估提供了明确的方向和衡量标准。
二、教学内容1. 传感器基本原理:介绍传感器的工作原理、分类及在测距中的应用,重点讲解超声波传感器和红外线传感器的原理。
- 教材章节:第二章“传感器及其应用”2. 测距原理及方法:分析超声波和红外线测距的物理原理,阐述距离计算公式,比较不同测距方法的优缺点。
- 教材章节:第三章“距离测量方法”3. 传感器操作与数据处理:讲解传感器设备的操作方法,演示测距实验过程,分析数据处理方法及注意事项。
- 教材章节:第四章“传感器数据采集与处理”4. 实践项目:设计并实施简单测距系统,解决实际问题,如停车场车位检测、自动门控等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
传感器原理及应用课题研究课题名称:列车测速测距系统院系:机械与电子控制工程学院专业:测控技术与仪器目录一、各种检测方式与比较......................................... - 2 -(一)测速电机.......................................... - 2 - (二)光电式............................................ - 2 - (三) GPS............................................... - 2 - (四)航位推算系统...................................... - 2 - (五)雷达测速.......................................... - 3 - (六)未来的方向........................................ - 3 -二、传感器的选择及安装......................................... - 3 -三、光电转速传感器的系统设计................................... - 4 -(一)光电传感器........................................... - 4 - (二)调理电路............................................. - 5 - (三)测量系统主机部分设计................................. - 8 -①单片机................................................ - 8 -②程序模块设计......................................... - 10 -③主程序流程图程序流程图............................... - 11 -④动态显示仿真......................................... - 12 - 四、雷达部分.................................................. - 13 -(一)雷达测速系统........................................ - 13 -①雷达测速原理及安装................................... - 13 -②系统框图............................................. - 14 -③环节选型............................................. - 14 - 五、修正部分.................................................. - 15 -(一)定位技术背景........................................ - 15 - (二)多传感器融合测速方法及问题.......................... - 16 - (三)修正方法............................................ - 17 - (四)列车打滑实验的传感器速度曲线........................ - 18 -六、无线传输.................................................. - 19 -七、电源...................................................... - 20 -八、参考文献.................................................. - 20 - 附录A 光电传感系统总程序清单.................................. - 21 -摘要:目前, 安全问题日益受到重视, 使得对各种列车运行控制系统的研究不断加强, 列车速度和位置的检测, 作为实现系统功能的先决条件也就显得越来越重要。
随着铁路大提速,列车运行速度越来越快,传统的测速方法存在一些不足之处。
为此本文提出了一种适合列车运行中实时监测的多传感器融合的测速测距系统。
论文重点研究了多传感器信息融合在城市轨道交通列车测速定位的应用。
以信息融合技术为基础,研究以速度传感器为核心的多传感器融合列车测速定位系统,并且有效地防止空转等故障现象的发生。
关键词:光电式传感器;航位推算系统;雷达测速;列车;测速测距一、各种检测方式与比较(一)测速电机从应用情况看, 测速电机方式虽然比较简单, 但在低速时感生电动势较低, 造成测量精度降低, 车速低于一定值时甚至不能推动测速单元工作, 并且系统可靠性较差。
(二)光电式转速传感器由于车轴的转动直接反映列车的运动, 因此可以利用车轴转动信息获得列车的运行速度,所以我们可以采用光电式转速传感器。
不足:由于利用轮轴旋转信息进行测速测距, 不可避免地受到车轮走行状态的影响。
(三)GPS不足:①当线路平行股道十分接近或有多个列车进出站时, 难以识别列车占用的是哪一股道; ②在地形复杂地段,例如在山区和隧道, 由于无线电波传播特性的影响会产生信号盲区。
(四)航位推算系统受到传感器本身温漂、敏感度等的影响,航位推算系统在短时间测量具有较高的精度,但长时间使用会导致较大的累积误差,因此在使用航位推算系统进行列车测速定位时,需要解决累积误差的补偿问题。
(五)雷达测速雷达测速是一种直接测量速度的方法,可以直接得到列车实际的运行速度,不需要通过车轮转动的信息来间接测量。
在机车上安装雷达, 始终向轨面发射电磁波, 由于机车和轨面之间有相对运动, 根据多普勒频移效应原理, 在发射波和反射波之间产生频差,通过测量频差可以计算出机车的运行速度, 并累积求出走行距离。
有效地防止空转、滑行外, 也推动了定位停车装置的开发。
不足:由于信号传输波段有时会受到干扰。
原理:多普勒频率的直观理解:振荡源发射的电磁波以恒速传播,如果接受者相对于振荡源是不动的,则它在单位时间收到电磁波的振荡数目与振荡源发出的相同,即两者的频率相等。
若振荡源与接受者之间有相对接近的运动,则接受者在单位时间收到的振荡数目要比不动时多一些,也就是接受的频率增高,当二者背向相对运动时,接受频率降低。
(六)未来的方向综合化;尽量采用智能化、数字化的处理方法;各种方法如何提升测量精度;整合化系统。
二、传感器的选择及安装最终选用:光电式+雷达测速+航位推算系统。
安装位置光电转速传感器此检测装置根据实际安装情况位置进行安装。
如右图,将信号盘固定在车轮转轴上,光电转速传感器正对着信号盘。
雷达如图三、光电转速传感器的系统设计(一)光电传感器光电式传感器是将被测量的变化转换成光信号的变化,再通过光电器件把光信号的变化转换成电信号的一种传感器。
传感器的输出信号易于数字化处理,满足列车运行控制系统智能化、小型化的发展趋势。
另外,它具有频谱宽、不易受电磁干扰的影响、非接触式测量、响应快、可靠性高等优点。
选用的传感器型号为SZGB-3(单向)SZGB-3, 20电源电压为12V DCSZGB-3型传感器主要性能介绍如下:1)供单向计数器使用,测量转速和线速度.2)采用密封结构性能稳定.3)光源用红外发光管,功耗小,寿命长.4) SZGB-3, 20电源电压为12V DCSZGB-3型传感器主要性能介绍如下:SZGB-3.型光电转速传感器,使用时通过连轴节与被测转轴连接,当转轴旋转时,将转角位移转换成电脉冲信号,供二次仪表计数使用。
(1)输出脉冲数:60脉冲(每一转)(2)输出信号幅值:50r/min时30mV(3)测速围:50---5000r/min(4)使用时间:可连续使用,使用中勿需加润滑油5)工作环境:温度-10~40℃,相对湿度≤85%无腐蚀性气体(二)调理电路因为SZGB-3型传感器50r/min时30mV,单片机输入电压0~5伏左右,调理电路放大倍数在100倍左右。
转速信号处理电路包括信号放大电路、整形及三极管整形电路。
采用两级放大电路,每一级都采用反响比例运算电路如图4.4.设计的电压放大倍数为3000倍。
其中第一级放大倍数为10,第二级放大倍数为10.放大后电压变化围为0~4.8V。
LM324采用12V双电源供电,由于电源的供电电压在一定围有副值上的波动,形成干扰信号。
为起到消除干扰,实现滤波作用,故供电电源两端需接10UF的电容接地,电容选择金属化聚丙已烯膜电容。
两级运放放大所采用的供电电源均采用此接法。
LM324是四运放集成电路,它采用14脚双列直插塑料封装,外形如图所示。
它的部包含四组形式完全相同的运算放大器,除电源共用外,四组运放相互独立。
每一组运算放大器可用图3.3所示的符号来表示,它有5个引出脚,其中“+”、“-”为两个信号输入端,“V+”、“V-”为正、负电源端,“Vo”为输出端。
两个信号输入端中,Vi-(-)为反相输入端,表示运放输出端Vo的信号与该输入端的位相反;Vi+(+)为同相输入端,表示运放输出端Vo的信号与该输入端的相位相同。
LM324的引脚排列见图3.4图3.3放大器图图3.4 引脚图由于LM324四运放电路具有电源电压围宽,静态功耗小,可单电源使用,价格低廉等优点,因此被广泛应用在各种电路中。
整形电路的主要作用是将正弦波信号转化为方波脉冲信号,正弦波信号电压的最大幅值约为4.8V,最小幅值为0V。
整形电路设计的是一种滞回电压比较器,它具有惯性,起到抗干扰的作用。
从而向输入端输入的滞回比较器。
在整形电路的输入端接一个电容C5(103),起到的作用是阻止其他信号的干扰,并且将放大的信号进行滤波,解耦。
R12和13是防止电路短路,起到保护电路的作用。
一次整形后的信号基本上为±5V的电平的脉冲信号,在脉冲计数时,常用的是+5V的脉冲信号。
如果直接采用-5V的脉冲计数,会增加电路的复杂性,故一般不直接使用,而是先进行二次整形。
第二次用三极管整形电路,当输出为-5V的信号时,三极管VT2(8050)的基-射极和电阻R18组成并联电路电流经过R18.R17,三极管VT2处于反向偏置状态,所以,VT2的集-射极未接通,故处于截止状态。
电源回路由R19,三极管VT2的集-射极组成,采用单电源+12V供电,由于集射极截止,处于断路状态,故输出电压U0为V。