江森自控笔试真题
自动控制工程师招聘笔试题及解答(某大型国企)2024年

2024年招聘自动控制工程师笔试题及解答(某大型国企)(答案在后面)一、单项选择题(本大题有10小题,每小题2分,共20分)1、在自动控制系统中,以下哪个术语表示系统的响应速度?A、稳态误差B、瞬态响应C、频率响应D、系统带宽2、以下哪个控制器可以实现系统的无静差调节?A、比例控制器(P)B、积分控制器(I)C、微分控制器(D)D、比例积分控制器(PI)3、在自动控制系统中,下列哪种传感器通常用于测量温度?A、光电传感器B、霍尔传感器C、热电偶D、光纤传感器4、PID控制器中的P、I、D分别代表什么?A、比例、积分、微分B、脉冲、指数、微分C、频率、积分、延迟D、偏置、积分、微分5、以下哪个部件在自动控制系统中起到转换、放大、调节信号的作用?A. 传感器B. 执行器C. 控制器D. 仪表6、在PID控制策略中,以下哪个参数代表系统的积分作用?A. P(比例)B. I(积分)C. D(微分)D. K(增益)7、以下关于PID控制器的说法,正确的是:A、PID控制器只有比例控制作用,没有积分和微分作用。
B、PID控制器在工业控制中应用广泛,但其参数整定复杂,难以实现精确控制。
C、PID控制器中,P代表比例,I代表积分,D代表差分。
D、PID控制器不能应用于动态系统,只能用于静态系统。
8、以下关于变频调速技术的描述,不正确的是:A、变频调速技术可以通过改变电机供电频率来调节电机转速。
B、变频调速技术可以实现电机平滑启动和停止,减少启动电流冲击。
C、变频调速技术适用于所有类型的交流电机。
D、变频调速技术可以提高电机运行效率,降低能耗。
9、某大型国企在自动化控制系统中采用PLC(可编程逻辑控制器)进行控制,以下关于PLC的描述错误的是:A、PLC具有高度的可靠性,适合在工业现场使用B、PLC编程简单,易于维护C、PLC的输入/输出通道有限,适用于简单的控制任务D、PLC具有丰富的功能模块,可以实现复杂的控制逻辑 10、在自动化控制系统中,以下哪种传感器不适合用于检测温度?A、热电偶B、热电阻C、红外传感器D、压力传感器二、多项选择题(本大题有10小题,每小题4分,共40分)1、以下哪些是常见的自动控制系统的组成部件?()A、传感器B、执行器C、控制器D、被控对象E、反馈元件2、以下哪些控制策略在自动控制系统中较为常见?()A、比例控制(P控制)B、积分控制(I控制)C、微分控制(D控制)D、比例积分控制(PI控制)E、比例积分微分控制(PID控制)3、以下哪些是自动控制系统的基本组成部分?A. 控制器B. 执行器C. 被控对象D. 反馈元件E. 传感器4、在PID控制器中,以下哪些参数对系统的稳定性有重要影响?A. 比例增益(Kp)B. 积分时间(Ti)C. 微分时间(Td)D. 控制器增益E. 控制器频率响应5、以下哪些是自动控制系统的基本组成元件?()A. 传感器B. 执行机构C. 控制器D. 被控对象E. 反馈元件6、以下关于PID控制器的说法正确的是?()A. PID控制器是一种经典的控制算法,广泛应用于各种控制系统。
自控期末考试试题及答案

自控期末考试试题及答案一、选择题(每题2分,共20分)1. 自动控制系统中,开环系统是指:A. 系统有反馈回路B. 系统没有反馈回路C. 系统有前馈回路D. 系统有控制回路2. 系统稳定性分析中,根轨迹法的基本原理是:A. 系统根随参数变化的轨迹B. 系统根随时间变化的轨迹C. 参数随系统根变化的轨迹D. 时间随参数变化的轨迹3. PID控制器中,P代表:A. 比例B. 积分C. 微分D. 比例-积分4. 以下哪个不是控制系统的性能指标:A. 稳态误差B. 响应速度C. 稳定性D. 系统成本5. 状态空间法中,状态变量的选取原则是:A. 系统输入B. 系统输出C. 系统内部变量D. 系统外部变量6. 在控制系统中,超调量是指:A. 系统达到稳态时的误差B. 系统响应过程中的最大偏差C. 系统响应时间D. 系统稳态误差7. 闭环控制系统的传递函数是:A. G(s)H(s)B. G(s)/[1+G(s)H(s)]C. 1/[1+G(s)H(s)]D. G(s)*[1+H(s)]8. 控制系统的频率响应分析中,奈奎斯特判据的主要用途是:A. 确定系统稳定性B. 确定系统性能C. 确定系统响应速度D. 确定系统超调量9. 以下哪个不是控制系统的类型:A. 线性系统B. 非线性系统C. 离散系统D. 随机系统10. 系统设计中,最小相位系统是指:A. 系统相位随频率增加而增加B. 系统相位随频率增加而减少C. 系统相位为零D. 系统相位为常数二、简答题(每题10分,共30分)1. 解释什么是系统的时间响应,并列举至少三种常见的时间响应类型。
2. 描述PID控制器的设计过程,并解释各部分的作用。
3. 阐述状态空间法与传递函数法在控制系统分析中的不同应用。
三、计算题(每题25分,共50分)1. 给定一个二阶系统,其传递函数为:G(s) = (2s + 1) / (s^2 +3s + 2)。
计算该系统的单位阶跃响应,并画出其响应曲线。
长春富维-江森自控 笔试 一面 二面 终面
本人华南理工硕士,机械。
2011年10月10日晚上,完成长春富维-江森自控网申。
111011 晚上长春富维-江森自控宣讲。
笔试:111012早上9:00长春富维-江森自控的笔试,行测和英语,还有图形划分,智力题。
初面:下午13:42收到长春富维-江森自控初面通知。
下午15:30开始。
形式是8人一组,拿着给定的材料来进行任意东西的制作。
35分钟做,5分钟阐述。
我们组有一个同学A一开始就在指导建议地开说,心里觉得这人不实际,(过程里也是光会说少动手)。
我在整个过程还是老实而和谐的,因为自己想法的确多点,创新而务实。
有人提出要不既然是做汽车内饰的,我们做一个汽车。
我说这样没新意了,个个都会想到。
我提出做一个船,而船上有一个独一无二的椅子。
(结合了长春富维主做座椅等内饰,一会说的时候就可以结合公司的价值观,产品目标等来吹。
)而整个过程,我们还是挺合作的,分工合作,有人做罗盘,有人做座椅,并且不断的完善我们的想法,丰富我们的设计功能。
我觉得我挺能调动大家的积极性和想法激情。
最后,同学A就提议同学B来做最后描述,说因为他画的船(其实这个决定不好,其实从过程中,谁最能表达,思路想法清晰其实不是他。
)HR来到后,叫我来总结,同学A就说我们推了同学B来总结,因为是他提出的主意(我晕,同学A真能扯)。
同学B说完叫我补充一下我们团队如何合作和开展工作的。
我就主动向HR得到允许,作了补充发言强调团队集不同人的长处来完成的,赞扬了车辆专业的同学B一些专业知识,还有女生在细节上的贡献等。
对群面的经验:能耐,忍让,不追功,求同,自己有实力,想法表达适当,沟通合作能力得到认可就好,就算自己贡献多也谦虚点,不要招风,适当赞美团队的优点是好的。
有些人一开口就云云的说理论说布局计划,看样子就是只会指点不大干事的人。
这些人没必要和他争,也要包容,反正各有贡献就好了。
昨天看了一个本科生写的对群面的看法,开始和我一样都讨厌这形式,但后来想明白,其实在真实工作里也是这样,各人有自己的小算盘。
(完整word版)自动控制原理试卷包含答案

自动控制原理试卷一. 是非题(5分):(1)系统的稳态误差有系统的开环放大倍数k 和类型决定的( );(2)系统的频率特性是系统输入为正弦信号时的输出( );(3)开环传递函数为)0(2>k s k 的单位负反馈系统能跟深速度输入信号( );(4)传递函数中的是有量纲的,其单位为 ( );(5)闭环系统的极点均为稳定的实极点,则阶跃响应是无 调的( );二. 是非题(5分):(1)为了使系统的过度过程比较平稳要求系统的相角裕量大于零( );(2)Bode 图的横坐标是按角频率均匀分度的,按其对数值标产生的( );(3)对于最小相位系统,根据对数幅频特性就能画出相频特性( );(4)单位闭环负反馈系统的开环传递函数为)()()(s D s N s G =,劳斯稳定判据是根据)(s D 的系数判闭环 系统的稳定性( );奈奎斯特稳定判据是根据)(s G 的幅相频率特性曲线判闭环系统的稳定性 ( )。
三. 填空计算题(15分):(1)如图所示:RC 网络,其输出)(t u c 与输入)(t u r 的微分方程描述为 ,假定在零初始条件下,系统的传递函数)(s φ= ,该系统在)(1)(t t u r =作用时,有)(t u c = 。
(2)系统结构如图,该系统是 反馈系统,是 阶系统,是 型系统,若要使系统的放大系数为1,调节时间为0.1秒(取%σ的误差带),0k 应为 ,t k 应为 。
(3)如果单位负反馈系统的开环传递函数是))(()()(b s a s c s k s G +++=,该系统是 阶系统,是 型系统,该系统的稳态位置误差系数为 ,稳态速度误差系数为 ,稳态加速度误差系数为速度误差系数为 。
四. 是非简答题(5分):(1)已知某系统的开环传递函数在右半s 平面的极点数为,试叙述Nyquist 稳定判据的结论。
(2)试叙述系统稳定的充分必要条件。
(3)系统的稳定性不仅与系统结构有关,而且与输入信号有关,该结论是否正确。
自控题库——精选推荐

⾃控题库第⼀类:填空题⼀.填空题1、冗余设计可采⽤(热备份)或(冷备份)。
2.MPI 接⼝⼀般的默认传输速率(187.5 )kbps,PROFIBUS-DP接⼝主要⽤于连接(分布式)I/O,传输速率(12)Mbps. 3. ⾃动控制系统按照系统按结构分类,有(闭环)控制系统(开环)控制系统复合控制系统。
4. ⾃动控制系统的⽅块图由串联、(并联)、(反馈)三种基本形式组成。
5. 串⾏数据通信的⽅向性结构有三种,即( 单⼯)、半双⼯和(全双⼯)。
6. 最常⽤的两种多路复⽤技术为(频分多路复⽤)和(时分多路复⽤),其中,前者是同⼀时间同时传送多路信号,⽽后者是将⼀条物理信道按时间分成若⼲个时间⽚轮流分配给多个信号使⽤。
7. 在TCP/IP层次模型中与OSI参考模型第四层(运输层)相对应的主要协议有(TCP)和(UDP),其中后者提供⽆连接的不可靠传输服务。
8.局域⽹使⽤的三种典型拓朴结构是(总线型)、(环形⽹)、(星型⽹)。
9.开放系统互连参考模型OSI中,共分七个层次,其中最下⾯的三个层次从下到上分别是(物理层)、(数据链路层)、(⽹络层)。
10.可编程序控制器 (PLC)常⽤的编程语⾔是( 梯形图)。
11.局域⽹络常见的拓扑结构有( 星形结构 )、(环形结构)、( 总线形结构),传输介质主要有 ( 双绞线)、同轴电缆和( 光缆 ) . 12.计算机内部⽤来传送、存储、加⼯处理的数据或指令是以(⼆进制)码形式进⾏的。
13.⼆进制数101110转换为等值的⼋进制数是(56),⼗进制数(46).14.将⼗进制数215转换成⼆进制数是(11010111 ),转换成⼋进制数是(327),转换成⼗六进制数是(D7)。
15、 K字节就是2的(10)次⽅字节,即(1024)字节,M字节就是2的 (20)次⽅字节,约为(100万)字节。
16、机器语⾔中的指令结构⼀般(操作码)和(地址码)两部分组成。
17、内存分为(只读内存)和(可读写内存)两类。
自考自控复习题及答案
一、单项选择题1. 对自动控制系统的性能最基本的要求为 【 A 】A.稳定性B.灵敏性C.快速性D.准确性2. 有一线性系统,其输入分别为u 1(t) 和u 2(t) 时,输出分别为y 1(t ) 和y 2(t) 。
当输入为 a 1u 1(t)+a 2u 2(t) 时 (a 1,a 2 为常数),输出应为 【 B 】A. a 1y 1(t)+y 2(t)B. a 1y 1(t)+a 2y 2(t)C.a 1y 1(t)-a 2y 2(t)D.y 1(t)+a 2y 2(t)3. 如图所示的非线性为 【 D 】A. 饱和非线性B. 死区非线性C. 磁滞非线性D. 继电型非线性4. 时域分析中最常用的典型输入信号是 【 D 】A.脉冲函数B.斜坡函数C.抛物线函数D.阶跃函数5. 控制理论中的频率分析法采用的典型输入信号为 【 C 】A. 阶跃信号B. 脉冲信号C. 正弦信号D. 斜坡信号6. 单位抛物线函数在0t ≥时的表达式为()x t = 【 C 】A.tB.2tC.2/2tD.22t7. 函数sin t ω的拉氏变换是 【 A 】 A.22s ωω+ B.22s s ω+ C.221s ω+ D.22s ω+ 8. 函数cos t ω的拉普拉斯变换是 【 B 】A.22s ωω+B.22s s ω+C.221s ω+ D.22s ω+ 9. 线性定常系统的传递函数,是在零初始条件下 【 B 】A. 系统输出信号与输入信号之比B. 系统输出信号的拉氏变换与输入信号的拉氏变换之比C. 系统输入信号与输出信号之比D. 系统输入信号的拉氏变换与输出信号的拉氏变换之比10. 传递函数反映了系统的动态性能,它 【 C 】A. 只与输入信号有关B. 只与初始条件有关C. 只与系统的结构参数有关D. 与输入信号、初始条件、系统结构都有关11. 控制系统中,典型环节的划分是根据 【 D 】A. 元件或设备的形式B. 系统的物理结构C. 环节的连接方式D. 环节的数学模型12. 令线性定常系统传递函数的分母多项式为零,则可得到系统的 【 D 】A.代数方程B.差分方程C.状态方程D.特征方程13. 主导极点的特点是 【 C 】A. 距离实轴很近B. 距离实轴很远C. 距离虚轴很近D. 距离虚轴很远14. 设控制系统的开环传递函数为()(1)(2)k G s s s s =++,该系统为 【 B 】 A. 0型系统 B. 1型系统 C. 2型系统 D. 3型系统15. 控制系统的上升时间 t r 、调整时间 t S 等反映出系统的 【 C 】A. 相对稳定性B. 绝对稳定性C. 快速性D. 准确性16. 控制系统的稳态误差e ss 反映了系统的 【 A 】A.稳态控制精度B.相对稳定性C.快速性D.绝对稳定性17. 一阶系统单位阶跃响应的稳态误差为 【 A 】A. 0B. 1C. ∞D. 其他常数18. 一阶系统1()1G s Ts =+的时间常数T 越大,则输出响应达到稳态值的时间 【 A 】 A. 越长 B. 越短 C. 不变 D. 不定19. 二阶系统的传递函数为16s 4s 162++,其阻尼比为 【 D 】A. 4B. 2C. 1D. 0.520. 当二阶系统的根分布在根平面的虚轴上时,系统的阻尼比ζ为 【 B 】A .ζ=1B .ζ=0C .0<ζ<1D .ζ≥121. 当二阶系统的阻尼比ζ大于1时,其阶跃响应曲线为 【 B 】A. 单调下降B.单调上升C.等幅振荡D.衰减振荡22. 如果系统中加入一个微分负反馈,系统的超调量将 【 B 】A. 增加B. 减小C. 不变D. 不定23. 当二阶系统的传递函数在左半复平面含有零点时,相当于在前向通道加入了一个 比例微分环节,这时 【 C 】A .阻尼比增大,稳定性降低B .阻尼比减小,稳定性降低C .阻尼比增大,稳定性提高D .阻尼比减小,稳定性提高24. 若两个环节的传递函数分别为1()G s 和2()G s ,则串联后的等效传递函数为【 B 】A.12()()G s G s +B.12()()G s G s ⋅C.12()/()G s G sD.1212()()()()G s G s G s G s + 25. 若负反馈系统的前向通道传递函数为()G s ,反馈通道传递函数为()H s ,则系统的等效传递函数为 【 D 】A.()()G s H sB.()()1()()G s H s G s H s -C.()()1()()G s H s G s H s +D.()1()()G s G s H s + 26. 传递函数G(s)=e s τ-的环节称为 【 C 】A.惯性环节B.振荡环节C.延迟环节D.微分环节27. 若系统的特征方程式为s 4+2s 3+3s+1=0 ,则此系统的稳定性为 【 C 】A. 稳定B. 临界稳定C. 不稳定D. 无法判断28. 若系统的特征方程式为 s 3+4s+1=0 ,则此系统的稳定性为 【 B 】A.稳定B.临界稳定C.不稳定D.无法判断29 若劳斯表中第一列的系数为[5,3,-1,-2]T ,则系统在右半复平面的特征根有 【 B 】A.0个B.1个C.2个D.3个30. 拉普拉斯变换终值定理的表达式为 【 B 】A. 0()lim ()lim ()t s x x t sX s →→∞∞==B. 0()lim ()lim ()t s x x t sX s →∞→∞== C. 0()lim ()lim ()t s x x t X s →∞→∞== D. 0()lim ()lim ()t s x x t X s →→∞∞== 31. 若系统开环传递函数为()()G s H s ,则稳态位置误差系数p K 为 【 B 】 A. 01lim ()()s G s H s s→ B. 0lim ()()s G s H s → C. 0lim ()()s sG s H s → D. 20lim ()()s s G s H s →32. 若系统开环传递函数为()()G s H s ,则稳态速度误差系数v K 为 【 C 】 A. 01lim ()()s G s H s s→ B. 0lim ()()s G s H s → C. 0lim ()()s sG s H s → D. 20lim ()()s s G s H s →33. 若系统开环传递函数为()()G s H s ,则稳态加速度误差系数a K 为 【 D 】 A. 01lim ()()s G s H s s→ B. 0lim ()()s G s H s → C. 0lim ()()s sG s H s → D. 20lim ()()s s G s H s → 34. 根轨迹法是一种简捷而直观的时域分析方法,提出该方法的科学家是 【 A 】A .EvansB .NyquistC .HurwitzD .Nichols35. 开环传递函数为2(2)()(4)k s G s s s +=+的反馈控制系统,其根轨迹的分支数为【 C 】 A. 4 B. 3 C. 2 D. 136. 若开环传递函数(4)()()(2)k s G s H s s s +=+,则实轴上的根轨迹为 【 D 】 A. 只有(-∞,-4] B. 只有[-4,-2]C. 只有[-2,0]D.(-∞,-4]和[-2,0]37. 开环传递函数为(0.51)(0.52)()(0.53)k s s G s s s ++=+,其根轨迹终点为 【 D 】 A. 0,-3 B. -2,无穷远 C. 0,-6 D. -2,-438. 1型系统对数幅频特性的低频段渐近线斜率为 【 C 】A.-60dB/decB.-40dB/decC.-20dB/decD.0dB/dec39. 2型系统开环对数幅频渐近特性的低频段斜率为 【 A 】A.-40dB/decB.-20dB/decC.0dB/decD.+20dB/dec40. 系统传递函数为16s 4s 162++,则其对数幅频特性渐近线的转折频率为 【 B 】A. 2rad/sB. 4rad/sC. 8rad/sD. 16rad/s 41. 设某闭环传递函数为1()1001s s φ=+,则其截止频率为 【 D 】 A. 10 rad/s B. 1 rad/sC. 0.1 rad/sD. 0.01 rad/s42. 设某闭环传递函数为1s 101)s (R )s (Y +=,则其频带宽度为 【 C 】 A. 0~10 rad/s B. 0~1 rad/sC. 0~0.1 rad/sD. 0~0.01 rad/s43. 微分环节的相频特性为θ ( ω )= 【 A 】A. 90 °B. -90 °C. 0 °D. -180 °44. 对于微分环节()G s s =,当频率ω从0向+∞变化时,其奈奎斯特曲线为 【 A 】A. 正虚轴B. 负虚轴C. 正实轴D. 负实轴45. ω从 0 变化到 + ∞时,迟延环节频率特性极坐标图为 【 A 】A. 圆B.半圆C. 椭圆D. 抛物线45. 属于频域稳定判定方法的是 【 D 】A. 劳斯判据B.赫尔维茨判据C.根轨迹法D.奈奎斯特判据46. 利用奈奎斯特图可以分析闭环控制系统的 【 C 】A. 稳态性能B. 动态性能C. 稳态和动态性能D. 抗扰性能47. 下列频域性能指标中,反映闭环频域性能的是 【 A 】A.谐振峰值M rB.相位裕量γC. 增益裕量K gD. 剪切频率ω c48. 在实际中很少单独使用的校正方式是 【 D 】A. 串联校正B. 并联校正C. 局部反馈校正D. 前馈校正49. 某串联校正装置的传递函数为 1()1c Ts G s Tsβ+=+,其中1β>,则该装置是 【 B 】 A. 超前校正装置 B. 滞后校正装置C. 滞后-超前校正装置D. 超前-滞后校正装置50. PI 控制规律的P 、I 分别指 【 B 】A. 比例、微分B. 比例、积分C. 微分、积分D. 积分、微分51 PD 控制规律的P 、D 分别指 【 A 】A.比例、微分B.比例、积分C.微分、积分D.积分、微分52. 下面的表达式中,哪个是PID 控制器的传递函数?【 C 】 A. 110s + B. 2110s + C. 12100.011ss s +++ D. 210s s ++53. 若系统的状态方程为010011x x u ⎡⎤⎡⎤=+⎢⎥⎢⎥-⎣⎦⎣⎦,则该系统的特征根为【 B 】 A. 0,0 B. 0,-1C. 1,-1D. 0,154. 设系统[]010x x u,y 10x 011⎡⎤⎡⎤=+=⎢⎥⎢⎥-⎣⎦⎣⎦,则该系统【A 】 A .状态可控且可观测B .状态可控但不可观测C .状态不可控且不可观测D .状态不可控且可观测二、填空题1. 对自动控制系统的性能要求可概括为稳定性、快速性和 准确性 。
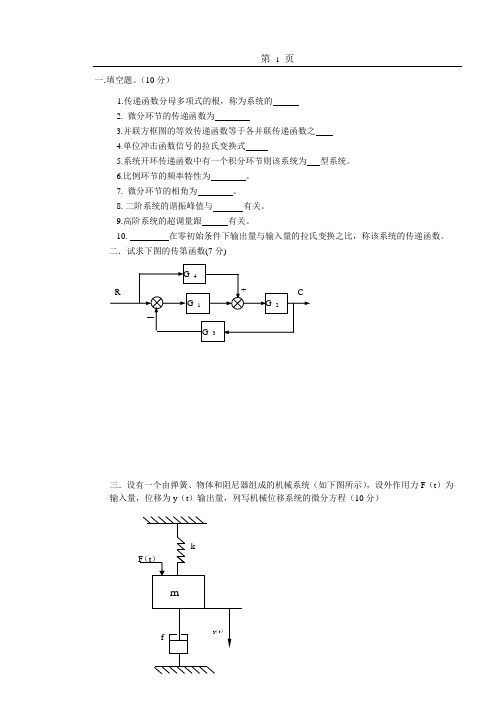
《 自动控制原理 》典型考试试题

《 自动控制原理 》典型考试试题(时间120分钟)院/系 专业 姓名 学号第二章:主要是化简系统结构图求系统的传递函数,可以用化简,也可以用梅逊公式来求一、(共15分)已知系统的结构图如图所示。
请写出系统在输入r(t)和扰动n(t)同时作用下的输出C(s)的表达式。
二 、(共15分)已知系统的结构图如图所示。
试求传递函数)()(s R s C ,)()(s N s C 。
三、(共15分)已知系统的结构图如图所示。
试确定系统的闭环传递函数C(s)/R(s)。
四、(共15分)系统结构图如图所示,求X(s)的表达式五、(共15分)已知系统的结构图如图所示。
试确定系统的闭环传递函数C(s)/R(s)和C(s)/D(s)。
六、(共15分)系统的结构图如图所示,试求该系统的闭环传递函数)()(s R s C 。
七、(15分)试用结构图等效化简求题图所示各系统的传递函数)()(s R s C 一、(共15分)某控制系统的方框图如图所示,欲保证阻尼比ξ=0.7和响应单位斜坡函数的稳态误差为ss e =0.25,试确定系统参数K 、τ。
二、(共10分)设图(a )所示系统的单位阶跃响应如图(b )所示。
试确定系统参数,1K 2K 和a 。
三、(共15分)已知系统结构图如下所示。
求系统在输入r(t)=t 和扰动信号d(t)=1(t)作用下的稳态误差和稳态输出)(∞C四、(共10分)已知单位负反馈系统的开环传递函数为:试确定引起闭环系统等幅振荡时的K 值和相应的振荡频率ω五、(15分)设单位反馈系统的开环传递函数为若系统以2rad/s 频率持续振荡,试确定相应的K 和α值六、(共15分)系统结构图如图所示。
(1)为确保系统稳定,如何取K 值?(2)为使系统特征根全部位于s 平面1-=s 的左侧,K 应取何值?(3)若22)(+=t t r 时,要求系统稳态误差25.0≤ss e ,K 应取何值?六、(15分)单位反馈系统的开环传递函数为)5)(3()(++=s s s K s G 为使系统特征根的实部不大于-1,试确定开环增益的取值范围。
电控面试笔试题目及答案
电控测试题时间:90分钟姓名:得分:一、填空(每空2分)1.自动控制系统的最基本的形式是控制和控制;他们的区别是:在控制器与被控对象之间只有正向控制作用没有反馈控制作用,在控制器与被控对象之间不仅有正向控制作用而且存在反馈控制作用。
2.反馈是将检测出来的送回控制系统的,并与比较的过程。
3.模拟信号在时间上是的,即在任何瞬时都可以确定其数值的信号;数字信号是一种以形式出现的信号。
4.热电偶的工作原理是基于效应,将的大小转换为的大小。
热电阻的工作原理是基于物质本身的随起本身的变化而变化的效应。
5.信噪比是指信号通道中和之比。
6.实际应用中,为抑制电感性负载切投所产生的干扰,一般会采用和来改善系统。
7. 用于处理器最基本的编程语言。
二、综合题(每题12分)1、晶闸管元件导通后,通过晶闸管的电流大小取决于什么?晶闸管由导通转为关断需要什么条件?2、求图中电路中各支路的电流。
3、如图所示电路,已知L=20Mh,C=200pF,R=100Ω,正弦电压电源V=10V,,求电路的谐振频率fo,电路的品质因数Q以及谐振时的Uc、Ul4、如图所示:三极管为NPN型硅管,放大倍数为β,请简要说明三极管作用,并给出三极管在饱和状态时的近似电压值Uce、Ube5、请以流程图的形式简述软件开发的一般过程。
电控测试题答案一、填空1.开环、闭环、开环控制、闭环控制2.输出量、输入端、输入信号3.连续变化、离散、不连续4.热电、被测温度、电势、电阻率、温度5.有用信号功率值、噪声信号功率值6.阻容(RC)网络、压敏电阻7.汇编语言二、综合题1、晶闸管元件导通后,便失去阻断能力,其阳极和阴极之间的电压突然下降到约0.8~1V的管压降,这时晶闸管的电流大小仅仅由外加的电压及回路阻抗的大小决定。
要使晶闸管关断,则必须使通过晶闸管的电流降到维持电流一下才行。
2、解:设i’5=1A,则U’BC=(R5+R6) i’5=22V,i’4= U’BC/R4=1.1A,i’3= i’4+ i’5=2.1AU’AD=R3i’3+ U’BC=26.2V,i’2= U’AD/R2=1.31A, i’1= i’2+ i’3=3.41AU’S= R1i’1+ U’AD=33.02V已知U S=120V,则K=U S/ U’S=120/33.02=3.63所以:i1=K i’1=3.63*3.41=12.38A,i2=K i’2=4.76A, i3=K i’3=7.62A,i4=K i’4=3.99A, i5=K i’5=3.63A3、解:fo=1/2π LC =1/2*3.14* 20*10-3*200*10-12 =79.6KHzQ=(1/R) LC =(1/100)* 20*10-3*200*10-12 =100U L=U C=QU=100*10=1000V4、解:(1)当U I=-U BE时,三极管的发射结和集电结均为反向偏置,所以i B≈0,i C≈0,U CE≈U CC,这时集电极回路中的C、E极之间近似于开路,相当于开关断开一样,三极管此时工作于截止状态。
自控dcs系统题库及答案正式版.

自控dcs系统题库及答案正式版.自控车间DCS系统题库目录1.催化装置AC 800F系统题库----------------------------------- 22.常压联合装置TDC3000系统题库------------------------------- 63.重整加氢装置OCS系统题库----------------------------------- 144.聚丙烯装置JX-300X系统题库--------------------------------- 195.三套ESD系统题库------------------------------------------- 236.原料油成品油AB PLC系统题库-------------------------------- 267.液化汽罐区SIMENSE S7 系统题库------------------------------ 29催化AC 800F DCS系统题库判断题1.催化DCS的流程图组态中,流程图背景颜色定义为黑色(√)2.催化DCS的流程图组态中,流程图背景颜色定义为灰色 (X)3.催化DCS的流程图组态中,流程图背景颜色定义为兰色 (X)4.催化DCS的流程图组态中,流程图分辨率定义为(1280×1024) (√)5.催化DCS的流程图组态中,流程图分辨率定义为(1024×768) (X)6.催化DCS的流程图组态中,流程图分辨率定义为(800×600) (X)7.催化DCS的流程图组态中,仪表引压线颜色定义为黄色(√)8.催化DCS的流程图组态中,仪表引压线颜色定义为白色 (X)9.催化DCS的流程图组态中,仪表引压线颜色定义为兰色 (X)10.催化DCS的流程图组态中,调节阀用棒图表示,其中风关阀用黄色表示(√)11.催化DCS的流程图组态中,调节阀用棒图表示,其中风关阀用紫色表示 (X)12.催化DCS的流程图组态中,调节阀用棒图表示,其中风开阀用紫色表示(√)13.催化DCS的流程图组态中,调节阀用棒图表示,其中风开阀用黄色表示 (X)14.催化DCS的流程图组态中,各种工艺管道的宽度定义为1 (√)15.催化DCS的流程图组态中,各种工艺管道的宽度定义为2 (X)16.催化DCS的流程图组态中,各种工艺管道的宽度定义为3 (X)17.催化DCS的系统结构中,使用了4台CISCO (3550)型号交换机实现了上层网络冗余(√)18.催化DCS的系统结构中,使用了2台CISCO (3550)型号交换机实现了上层网络冗余 (X)19.催化DCS的系统结构中,共有8个AC 800F型号的控制器,实现了4对冗余控制器?(√)20.催化DCS的系统结构中,共有4个AC 800F型号的控制器,实现了2对冗余控制器?(X)21.催化800F DCS系统中,系统报警一级即高报或低报采用黄色闪烁表示(√)22.催化800F DCS系统中,系统报警一级即高报或低报采用红色闪烁表示 (X)23.催化800F DCS系统中,系统报警二级即高高报或低低报采用红色闪烁表示(√)24.催化800F DCS系统中,系统报警二级即高高报或低低报采用黄色闪烁表示 (X)25.催化800F DCS系统中,DI 810卡件为16通道开关量输入卡件(√)26.催化800F DCS系统中,DI 810卡件为8通道开关量输入卡件(X)27.催化800F DCS系统中,DO 810卡件为16通道开关量输出卡件(√)28.催化800F DCS系统中,DO 810卡件为8通道开关量输出卡件(X)29.催化800F DCS系统中,AI 845卡件为8通道冗余模拟量输入卡件(√)30.催化800F DCS系统中,AI 845卡件为8通道不支持冗余模拟量输入卡件 (X)31.催化800F DCS系统中,AO 845卡件为8通道冗余模拟量输出卡件(√)32.催化800F DCS系统中,AO 845卡件为8通道不支持冗余模拟量输出卡件 (X)33.催化800F DCS系统中,AI 810卡件为8通道模拟量输入卡件(√)34.催化800F DCS系统中,AI 810卡件为8通道冗余模拟量输入卡件 (X)35.800F DCS系统中组态调试软件CBF的项目文件为1个文件,后缀为pro (√)36.800F DCS系统中组态调试软件CBF有导出项目文件功能,导出文件后缀为(CSV)(√)37.800F DCS系统软件如果不安装硬件狗,能运行100天(√)38.800F DCS系统软件如果不安装硬件狗,能运行50天 (X)39.800F DCS系统软件安装后,系统默认用于存放项目的文件夹名称为p roj(√)40.800F DCS系统分为两级:操作管理级和过程控制级?(√)41.800F DCS系统分为三级:上层应用级?操作管理级和过程控制级? (X)42.Profibus 是目前世界上应用最广泛的开放型现场总线国际标准,分为FMS ?DP 及PA 三级(√)43.800F DCS 组态语言基于IEC61131_3 工业标准(√)44.800F DCS系统中操作组监控软件为CBF(Control Build F) (X)45.800F DCS系统中组态调试软件为DigiVis (X)46.800F DCS系统中权限锁定软件为DigiLock (√)47.800F DCS系统中操作站中可组态的自由画面数量受DCS 系统的限制 (X)48.800F DCS系统中组态语言FBD 为(梯形图) (X)49.800F DCS系统中组态语言LD为(功能方块图) (X)50.800F DCS系统中组态语言SFC为(顺序功能图) (√)51.800F DCS系统中组态语言IL为(指令表) (√)52.催化800F DCS系统中,S800I/O与控制器的通讯通过ProfibusDP协议实现(√)53.800F DCS系统具有唯一的系统全局数据库(√)54.800F DCS系统具有多个的系统全局数据库 (X)55.800F DCS系统使用控制器为32 位超级RISC CPU 多任务处理器(√)56.800F DCS系统使用控制器为32 位超级CISC CPU 多任务处理器 (X)57.800F DCS系统支持多种现场总线(Profibus ?FF ?Mod bus ?Hart ?CAN) (√)58.800F DCS系统仅支持Profibus现场总线 (X)59.800F DCS系统软件如果不安装硬件狗功能是不完整的 (X)60.800F DCS系统软件如果不安装硬件狗功能也是完整的,但仅能运行100天(√)61.800F DCS系统软件安装后,系统默认用于存放项目的文件夹名称为proj (√)62.800F DCS系统软件安装后,系统默认用于存放操作记录的文件夹名称为bpr (√)63.800F DCS系统软件安装后,系统默认用于存放趋势曲线的文件夹名称为curv (√)64.800F DCS系统软件安装后,系统默认用于存放导出文件的文件夹名称export (√)65.800F DCS系统软件硬件组态中,D-PS 代表过程站(√)66.800F DCS系统软件硬件组态中,D-PS/RED 代表冗余过程站(√)67.800F DCS系统软件硬件组态中,D-OS或VIS 代表操作员站(√)68.800F DCS系统软件硬件组态中,D-GS或GWY 代表网关站(√)69.800F DCS系统软件硬件组态中,OPC-S代表OPC服务器(√)70.800F DCS系统组态软件CBF中,P-CD代表公共画面库(√)71.催化800F DCS系统中,退出操作组监控软件DigiVis需要口令(√)72.催化800F DCS系统中,退出操作组监控软件DigiVis不需要口令 (X)73.催化800F DCS系统中,操作员控制块中M代表“手动” (√)74.催化800F DCS系统中,操作员控制块中M代表“自动” (X)75.催化800F DCS系统中,操作员控制块中A代表“自动” (√)76.催化800F DCS系统中,操作员控制块中A代表“手动” (X)77.催化800F DCS系统中,操作员控制块中I 表示跟踪由本回路内给(√)78.催化800F DCS系统中,操作员控制块中E 表示跟踪外给(√)79.催化800F DCS系统中,操作员控制块中I 表示跟踪外给 (X)80.催化800F DCS系统中,操作员控制块中E 表示跟踪由本回路内给 (X)81.800F DCS系统FBD组态中, C_CS功能块表示标准的PID 调节运算(√)82.800F DCS系统FBD组态中, C_CU功能块表示复杂的 PID 调节运算(√)83.800F DCS系统FBD组态中, C_CR功能块表示比率控制器运算(√)84.800F DCS系统FBD组态中, M_ANA功能块表示模拟量显示(√)85.800F DCS系统FBD组态中, M_BIN功能块表示数字量显示(√)86.800F DCS系统FBD组态中, M_BOUT功能块表示数字量输出(√)87.800F DCS系统FBD组态中, SCAL功能块表示量程转换(√)88.800F DCS系统FBD组态中, CT_ANA功能块表示模拟量累计(√)89.800F DCS系统CBF软件中,菜单project/commissioning表示在线调试(√)90.800F DCS系统CBF软件中,菜单project/configuration表示离线调试(√)91.800F DCS系统CBF软件中,菜单load/whole station表示全站下装(√)92.800F DCS系统CBF软件中,菜单load/changed objects表示改变下装(√)93.800F DCS系统FBD组态中,在线后出现版本错误,“改变下装”功能不受影响 (X)94.800F DCS系统CBF软件中,可用export backup功能将项目备份到各操作站(√)95.TCP/IP协议的传输介质中,10Base2代表细同轴电缆(√)96.TCP/IP协议的传输介质中,10Base5代表粗同轴电缆(√)97.TCP/IP协议的传输介质中,10BaseT代表10M双绞线电缆(√)98.TCP/IP协议的传输介质中,100BaseT代表100M双绞线电缆(√)99.AC 800F控制器运行时或带电时,可以插拔电源模件和以太网模件 (X) 100.催化DCS余锅联锁动作后,重新投用需先复位(√)选择题1.催化DCS的流程图组态中,流程图背景颜色定义为(A)色A?黑色 B?棕色 C?灰色 D?蓝色2.我公司使用的AC 800F控制器为(A)内存容量A?4M B?8M C?16M D?32M3.IEC61131_3组态语言中FBD意思为 (A)A?功能方块图 B?梯形图 C?顺序功能图 D?指令表4.IEC61131_3组态语言中LD意思为 (B)A?功能方块图 B?梯形图 C?顺序功能图 D?指令表5.IEC61131_3组态语言中SFC意思为 (C)A?功能方块图 B?梯形图 C?顺序功能图 D?指令表6.800F DCS系统FBD组态中,表示报警信息优先级的参数是(D)A?Type B?Value C?Access D?Prio7.800F DCS系统FBD组态中,表示极限值滞后的参数是(D)A?Type B?Value C?Access D?Hyst8.800F DCS系统组态中,使用(C)号控制器实现MTL温度数采通讯A?AC1 B?AC2 C?AC3 D?AC49.800F DCS系统组态中,使用(D)号控制器实现和ESD系统的通讯A?AC1 B?AC2 C?AC3 D?AC410.800F DCS系统组态中,控制室内机柜中使用的MTL温度数采型号为(D)A?MTL830 B?MTL831 C?MTL837 D?MTL83811.800F DCS系统组态中,装置现场使用的MTL温度数采型号为(B)A?MTL830 B?MTL831 C?MTL837 D?MTL83812.催化DCS系统中使用的隔离栅厂家为( B )A?MTL B?P+F C?E+H D?MOORE13.催化DCS操作站上对PID整定使用界面底部(C)按钮A?Graphic B?Trend C?Group D?SFC14.催化DCS操作站上调用总貌画面使用界面底部(A)按钮A?Overv B?Mag C?Sys D?Tag15.催化DCS操作站上对消息进行真正确认使用界面顶部(C)按钮A?>> B?VA C? A D?HORN1.最简单的AC 800F控制器由哪些卡件组成?答:最简单的AC 800F控制器是由一个带CPU板的机架,一个电源模件,一个以太网模件和一个现场总线模件组成2.催化800F DCS系统中,调用总貌画面的方式?答:第一种方式:从菜单行Display中调出即“Display-Overview display”第二种方式:从操作对话区中点击“OVERV”按键3.催化800F DCS系统中,调用用户图形的方式?答:第一种方式:从菜单行Display中调出即“Display-Graphic display-选中画面名字-OK”第二种方式:从操作对话区中点击“Graphic”按键第三种方式:从总貌画面中调出4.催化800F DCS系统中,调用趋势画面的方式?答:第一种方式:从菜单行Display中调出即“Display-Trend display-选中趋势画面名字-OK”第二种方式:从流程图中先选中点,在操作对话区中点击“Trend”按键5.班组规定的催化800F DCS系统CBF软件退出并作备份步骤答:1.Project/exit2. Project/Saves3. Project/Export backup 分别选择ES和OS1共备份至2处4. Project/Close5. Project/Exit7. 将项目文件huhhot_fccu.pro复制到本机“E:\组态资料\备份”文件夹中8. 将项目文件huhhot_fccu.pro复制到OS2的“E:\BACKUP”文件夹中9. 将项目文件huhhot_fccu.pro复制到班组活动硬盘中TD3000 DCS系统1、我厂TDC3000系统配置为:由一条PIN网?冗余的LCN网?冗余的UCN网组成BA 1条,1条B 1条,2条C 2条,1条D 2条,2条2、我厂TDC3000系统中,LCN与UCN通过两套冗余的 B 连接起来?A HMB NIMC PLNMD AM3、我厂TDC3000系统中,在C 上有6个US,一个UXS,分为2个控制台(CONSOLE)?A UCNB PINC LCND DCN4、我厂TDC3000系统中,CONSOLE1有6台US,其中1?2?3台用于 A 装置?A 常减压B MTBEC 气分 D气分和MTBE5、我厂TDC3000系统中,CONSOLE1有6台US,4?5?9台用于D 装置?A 常减压B MTBEC 气分 D气分和MTBE6、我厂TDC3000系统中, B 由1台UXS,一个工程师键盘,一个活动硬盘组成?A CONSOLE1B CONSOLE2C UCN1D UCN27、我厂TDC3000系统中,AREA是对装置操作进行的划分,每条LCN最多 10 个AREA?A 6B 8C 10D 128、我厂TDC3000系统中,改造后现设3个区域: A ?A常减压(CY)区域?气分和MTBE(FZ)区域?总区域(TT)B常减压(CY)区域?气分和MTBE(XW)区域?总区域(TT)C常减压(CY)区域?气分(FZ)区域?MTBE区域(XW)D常减压(CY)区域?气分(FZ)区域?MTBE区域(TT)9、我厂TDC3000系统中, B 上配有如下节点:AM,HM,PLNM(CG),NIM,US,UXS,一共14个节点?A UCNB LCNC PIND DCN10、我厂TDC3000系统中, A 的节点地址为15?A UXSB PLNMC AMD HM11、我厂TDC3000系统中, D 的节点地址为35?A UXSB PLNMC AMD HM12、我厂TDC3000系统中, C 的节点地址为25?A UXSB PLNMC AMD HM13、我厂TDC3000系统中,NIM(常减压)的节点地址为 A ?A 21?22B 23?24C 9?10D 11?1214、我厂TDC3000系统中,NIM(催化) 的节点地址为 B ?A 21?22B 23?24C 9?10D 11?1215、我厂TDC3000系统中, B 的节点地址为29?A UXSB PLNMC AMD HM16、我厂TDC3000系统中,常减压装置用的三台US的节点地址为 A ?A 1?2? 3B 4?5? 6C 7?8?9D 4?5?917、我厂TDC3000系统中,气分和MTBE装置用的三台US的节点地址为 D ?A 1?2? 3B 4?5? 6C 7?8?9D 4?5?918、我厂TDC3000系统中,UCN1上的APM完成A 装置的数据采集和控制?A 常减压B 气分C MTBED MTBE和气分19、我厂TDC3000系统中,UCN2上的APM完成D 装置的数据采集和控制功能?A 常减压B 气分C MTBED MTBE和气分20、我厂TDC3000系统中,常减压装置的APM节点地址为 D ?21、 A 9?10 B 11?12 C 9?11 D 9?10和11?1222、我厂TDC3000系统中,气分和MTBE装置的APM节点地址为 B ?A 9?10B 11?12C 9?11D 9?10和11?1223、我厂TDC3000系统中,NIM是A 的网络接口,NIM必须冗余以保证安全?A LCN与UCNB LCN与PLNMC PLNM与UCND LCN与PIN24、我厂TDC3000系统中,每个NIM上点数最多 C 点?A 10000B 2000C 8000D 600025、我厂TDC3000系统中,APM是一个高度灵活的数据采集和控制设备,可以配置多达40个可选择的IOP处理器?A 10B 20C 30D 4026、我厂TDC3000系统中,调制解调器(MODEM)是 D 的接口,包含载波调制解调器,能够自动地选择UCN电缆?A LCN与UCNB LCN与PLNMC PLNM与UCND UCN与APMM27、我厂TDC3000系统中, A 提供令牌总线(TOKEN BUS)控制?提供APM和UCN之间的数据通讯,也提供点对点的通讯?A 通讯处理器B I/O LINK接口处理器C 控制处理器 D调制解调器28、我厂TDC3000系统中, B 完成控制处理器与IOP卡间的数据通讯,并完成与冗余的IOP连接接口处理器的管理,冗余的APMM始终与主APMM之间的数据保持一致?A 通讯处理器B I/O LINK接口处理器C 控制处理器 D调制解调器29、我厂TDC3000系统中, C 执行所有的控制算法和控制方案?A 通讯处理器B I/O LINK接口处理器C 控制处理器 D调制解调器30、我厂TDC3000系统中,高电平模拟量输入卡件(HLAI),可接收一次表传来的 C 信号A 0-20mAB mvC 1-5V?4-20mAD 欧姆31、我厂TDC3000系统中,低电平模拟量输入多功能卡件(LLMUX),可接收 B 型号?A 0-20mAB 热电偶或热电阻C 1-5V?4-20mAD 欧姆判断题1.我厂TDC3000系统中,画线的命令ADD LINE (A L)?√2.我厂TDC3000系统中,画固体命令为ADD SOLID(A SOL)?√3.我厂TDC3000系统中,加字符命令为A T?√4.我厂TDC3000系统中,字符设定:大字符: S TS L,小字符; S TS S?√5.我厂TDC3000系统中,加数值命令为:ADD VALUE(A V)?√6.我厂TDC3000系统中,加棒图命令为:A DD BAR(A BAR)?√7.我厂TDC3000系统中,调用子图命令为: 如:A SUB $F3>DISP>AA?√8.我厂TDC3000系统中,选择命令为(SELECT),如:SEL L表示选线?√9.我厂TDC3000系统中,复制(COPY)的过程为以下步骤: √第一步:选择目标第二步:COPY第三步:选择起始位置第四步:选择终止位置第五步:ENTER10.我厂TDC3000系统中,移动(MOVE)的过程为以下步骤: √第一步:选择目标第二步:MOVE第三步:选择起始位置第四步:选择终止位置第五步:ENTER11.我厂TDC3000系统中,删除的过程为以下步骤: √第一步:选择被删除目标第二步:D第三步:ENTER12.我厂TDC3000系统中,取消上一次命令,按下CANCEL键?√13.我厂TDC3000系统中,改变尺寸命令为:SC?√14.我厂TDC3000系统中,加条件命令为:A C?√15.我厂TDC3000系统中,图的保存:画完图要存盘,W NET>DISP>AAA?√16.我厂TDC3000系统中,读图命令为R,例如R NET>DISP>AAA?√17.我厂TDC3000系统中,组态中点类型分为全点(FULL)和半点(C OMPONNT) √18.我厂TDC3000系统中,PV RANGE HIGH表示量程上限?√19.我厂TDC3000系统中,PV RANGE LOW表示量程下限?√20.TDC3000系统中,PV HIGH TRIP POINT表示高限报警值√21.TDC3000系统中, PV LOW TRIP POINT表示低限报警值√22.TDC3000系统中, PV HIGH HIGH TRIP POINT表示高高报警值√23.TDC3000系统中, PV LOW LOW TRIP POINT表示低低报警值√24.我厂TDC3000系统中,ALARM ENABLE STATE表示报警状态,分为能够报警(ENABLE),不能报警(DISABLE)和抑止报警(INHIBIT)?√25.我厂TDC3000系统中,每页组态完毕后不要忘记按下ENTER键,否则该页无效?√26.我厂TDC3000系统中,组态完毕后按下组合键CTRL+F12表示下装,按下组合键CTRL+F10表示存盘?√27.我厂TDC3000系统中,所组态的点必须击活(ACTIVE)后才能工作?√28.我厂TDC3000系统中,所建的点的MODUL 号和SLOT号等必须与现场站一一对应,不能有丝毫差错?√29.我厂TDC3000系统中,PV TRACKING OPTION PV表示跟踪方式?√30.TDC3000系统中,CONTROL ACTION表示控制作用,分为正(DIRECT)?反作用(REVERSE)?√31.我厂TDC3000系统中,OP LOW LIMIT VALUE IN% 表示OP 值下限?√32.我厂TDC3000系统中,操作组每组最多可加8个点?√问答题1?我厂TDC3000系统中,工程师站死机后如何启动?a)首先对工程师站进行复位RESET操作?b)等待屏幕出现“》”后,按下操作员键“LOAD”键c)稍后UXS屏幕提示:W,N,1,2,3,4,X,选择W+ENTER?d)UXS屏幕再提示:W,N,1,2,3,4,X,选择N+ENTER?e)UXS屏幕提示:OPR,ENG,UNP?选择E+ENTER?f)等待系统启动,工程师站安装完毕?2?我厂TDC3000系统中,操作站死机后如何启动?a)首先对操作站进行复位RESET操作?b)等待屏幕出现“》”后,按下操作员键“LOAD”键?c)稍后US屏幕提示:N,1,2,3,4,X,选择N+ENTER?d)US屏幕提示:OPR,ENG,UNP?选择O+ENTER?e)等待系统启动,操作站安装完毕?3?我厂TDC3000系统中,HM历史站死机后如何启动?HM是DCS系统的系统程序?历史数据?画面的存储单元,所以,如果HM出现故障,需及时处理?当HM出现红色FAIL后的处理步骤a)检查LCN柜最底层HM节点状态指示,正常为35,FAIL时,不为35?b)按下HM的RESET复位键或关闭HM节点电源,待5秒钟后下电?HM自启动,节点地址变为35?c)HM自启动开始,US上HM状态先显示LOC LOAD,然后READY,最后为OK,说明HM自启动成功?d)如果HM自启动不成功,则进行手动启动HM,操作步骤如下:(1)按下操作员键SYST/STATS?(2)选择HM节点目标框?(3)选择35节点,此时35数字变成白色?(4)选择LOAD/DUMP?(5)选择MANUAL LOAD?(6)选择OPERATOR PROGRAM?(7)选择DEFAULT SOURCE装载程序?(8)选择EXECUTE COMMAND?(9)选择DEFAULT SOURCE装载程序?(10)选择EXECUTE COMMAND?(11)按下回车键,HM的状态先显示LOC LOAD,然后READY,最后OK?4?我厂TDC3000系统中,APM掉电后如何启动?APM上电后,设备状态由OFFNET转换为ALIVE,应进行安装恢复(APMM上电后,卡件上的POWER灯亮,Status灯闪烁,等待几分钟,如果Status灯由闪烁变为持亮,则表明自动装载完毕,如仍然闪烁,则需要到US机上进行手动装载,US机上进行如下操作:):a)按下操作员键盘上SYST/STATS键,并选中UCN号?b)选中APM号和DETAIL/STATUS菜单项?c)选中APMM主或辅模件号?d)选中LOAD/SAVE/RESTORE?e)选中PROGRAM/LOAD+ENTER项?f)选中DEFAULT/SOURCE+EXECUTE/COMMAND,重复一次则APMM恢复正常?如果发现APMM为FAIL则需要到现场将相应的APMM故障卡件进行轻拔出后再轻插入,当APMM出现ALIVE状态后,然后按以上步骤处理5?我厂TDC3000系统中,在UsX上引导现场PC机的监测系统a)在工程师站UXS上,LOGIN的框内输入ROOT,PASSWORD框内输入HUHHOT?b)这时不允许按ENTER键,用鼠标将光标移到SHUTDOWN WSI 位置上点一下鼠标上左键?c)SHUTDOWN开始,当屏幕下方出现红色框后,SHUTDOWN成功?d)只要点触红框,便重新启动?e)等待几分钟后,现场PC机重新上电,REFLECTION画面恢复?6?我厂TDC3000系统中,将位号加入操作组的方法:a)同时按下CTRL+HELP组合键,进入工程师主菜单?b)点击AREA DATE BASE 进入区域数据库菜单?c)点击GROUP进入组画面?d)按下CMMD(PF4)键,返回区域数据库菜单?e)点击SELECT AREAf)选择要选择的区域(1,2,3,4,5)g)按下CANCEL键,返回组画面?h)在组画面填入组号,按下CTRL+F7组合键,回读出所填组号的画面i)在该画面上填入要加的位号,按下ENTER键?j)下装组态(CTRL+F12)k)下装完毕后,按下CMND(PF4)键,返回到区域数据库画面l)点击INSTALL AREA ,按下ENTER键安装至区域数据库?7?将位号加入历史组的方法:a)同时按下CTRL+HELP组合键,进入工程师主菜单?b)点击HM HISTORY GRUOPS 进入历史组菜单?c)填入单元号(UNIT),如CY?填入历史组号(HISTORIZITION GROUP)d)按下CTRL+F7组合键,回读出所填组号的画面e)在该画面上填入要加的位号,按下ENTER键?f)下装组态(CTRL+F12)8?我厂TDC3000系统中,IOP卡件出现IDLE状态a)按下操作员键盘上SYST/STATS键,并选中UCN号?b)选中APM号和DETAIL/STATUS菜单项?c)选中相应的IOP卡件号?d)选中LOAD/SAVE/RESTORE?e)选中RESTORE/MODULE?f)选中DEFAULT/SOURCE+EXECUTE/COMMAND?g)选中RUN/STATUS?h)选中STARTUP+ENTER?i)选中WARM/STARTUP+ENTER?j)如果重装整个IOP或多个IOP,则运行到步骤8后,选中ALL/MODULE+WARM/STARTUP+ENTER?9?我厂TDC3000系统中,NIM上电启动过程a)按下操作员键盘上SYST/STATS键?b)选中GATEWAY?c)选中NIM节点号?d)选中LOAD/DUMP?e)选中AUTO/LOAD/NET即可?ABB的OCS系统选择题1.A操作系统是OCS必需的运行环境?A UNIXB WINDOWSC LINXD OFFICE2.DCN环形网主要挂接以下节点:工作站?( B )?工程师站?历史站?A 打印机B 控制器C 交换机D 光线收发器3.AC460系统的一个控制器最多可挂C个AC460MOD CPU ?A 1B 2C 3D 44.而每个CPU可带B个承载板?A 1B 2C 3D 45.每个承载板包括B块通讯子卡?A 1B 2C 3D 46.即每个CPU带D个通讯子卡?A 1B 2C 3D 47.AC460系统的子卡之间冗余是靠C来实现的?A 硬件连接B 通讯线C 软件组态D 硬件8.我厂的DCN环网包括的7个节点为?A 4B 5C 6D 79.台工程师站兼操作站?台历史站兼操作站?台操作站?个控制器和台上位机? AA 1?2?2?1? 1B 2?1?2?1? 1C 2?2?1?1? 1D 1?2?1?2? 110.AC460系统中OSES1的 IP地址是C,节点地址是1?A 138.222.193.1B 138.222.193.2C 138.222.193.11D 138.222.193.311.AC460系统中OS2的IP地址是B?A 138.222.193.1B 138.222.193.2C 138.222.193.11D 138.222.193.312.AC460系统中HISOS3的IP地址是D?A 138.222.193.1B 138.222.193.2C 138.222.193.11D 138.222.193.313.AC460系统中OS4的IP地址是C,节点地址是4?A 138.222.193.2B 138.222.193.3C 138.222.193.11D 138.222.193.414.AC460系统中HISOS5的IP地址是D?A 138.222.193.2B 138.222.193.3C 138.222.193.11D 138.222.193.515.AC460由两个A构成?A 子控制器B 控制器C 承载板D 通讯子卡16.AC460系统中每一个插槽的物理位置都是固定的,如:1?2插槽是B,3?4插槽是承载板等A 控制器B CPUC 通讯子卡D 子控制器17.AC460系统中与DCN网通讯的两个通讯卡在C号插槽?A 12?13B 10?11C 13?14D 11?1218.所有A卡件均为冗余卡件?A S100B S80019.所有B卡件不冗余,只有通讯是冗余的?A S100B S80020.所有S800卡件不冗余,只有A是冗余的?A 通讯B 组态C 硬件D 软件21.AC460系统中S800的每个站只能带C个卡件?A 10B 8C 12D 1422.AC460系统中每台操作站可挂C台终端?A 1B 2C 3D 423.OCS系统中流程图绘制好后需要经过D,然后INSTALLER后才能在操作站上显示?A COPYB CLOSEC DISTRIBUTED CONVERTRT24.OCS系统中当重启2号或4号操作站时,他们所挂的终端必须停顿在系统的C上或关机,操作站才能正常下装环境?A 流程画面B 启动画面C 登陆画面D 连接画面25.OCS系统的AIN模板中,OPM指模板当前的A,分为手动与自动?A 操作方式B 回路状态C 如何跟踪D 阀位26.OCS系统的AIN模板中,LAN?BLK项是输入回路的D,LAN指LAN号,BLK指卡件号?A 软件位置B 回路位号 D 地址27.OCS系统的AIN模板中,CHNL是指该回路输入地址的C?A LAN号B 卡件号C 通道号D 位号28.OCS系统中的环境就是系统对现场回路C所用的软件背景?A 进行监测B 进行启动C 进行控制D 进行转换29.OCS系统中环境之下分为区,区是将装置中所有B的一些回路组态在一个区下面以方便组态和查询?A 位号相近B 物理位置相近C 测量方式一样D 测量高度一样30.OCS系统中,区下面分为组,一个组最多能组态C个控制回路?A 36B 24C 12D 8判断题1.OCS系统中,远程终端Client端的系统以当今流行的UNIX为应用平台?×2.OCS系统中,远程终端Client端在安装一个Xwindow类型的软件—exceed之后,就可以与Server端进行数据和信息的双向传递了?√3. 3.OCS系统中,Server端软件名称为NetStation?√4. 4.OCS系统中,对光驱进行锁定的命令是mount / SD_CDROM?√5.WINDOWS操作系统是OCS必需的运行环境?×6.AC460系统的一个控制器最多可挂2个CPU(AC460MOD)?×7.每个CPU可带2个承载板?√8.每个承载板包括2块通讯子卡,即每个CPU带4个通讯子卡?√9.AC460系统的子卡之间冗余是靠硬件来实现的?×10.我厂的DCN环网包括的7个节点为:1台工程师站兼操作站?2台历史站兼操作站?2台操作站?2个控制器?×11.AC460由两个子控制器构成?每个子控制器都为冗余双CPU?√12.AC460系统中每一个插槽的物理位置都是固定的,如:1?2插槽是CPU,3?4插槽是承载板等?√13.AC460系统中与DCN网通讯的两个通讯卡在13?14号插槽?√14.所有S100和S800卡件均为冗余卡件?×15.所有S100和S800卡件不冗余,只有通讯是冗余的?×16.AC460系统中S800的每个站能带12个卡件,但是站没有扩展功能?×17.AC460系统中每台操作站可挂2台终端?×18.OCS系统中远程终端的安装分为两个部分,我厂系统安装分为Client端的安装和Server端的安装?√19.OCS系统中流程图绘制好后只需要经过CONVERTRT后就能在操作站上显示?×20.OCS系统中当重启2号或4号操作站时,他们所挂的终端必须关机,操作站才能正常下装环境?×21.OCS系统的LOOPDETAIL界面主要包含回路的逻辑方块图?回路组态样板?各模块的组态样板?回路内硬件的地理位置等信息?×22.OCS系统的AIN模板中,MODE指控制回路的状态?×23.OCS系统的AIN模板中,OPM指模板当前的操作方式,分为手动与自动?√24.OCS系统的AIN模板中,LAN?BLK该输入回路的地址,LAN指LAN号,BLK指卡件号?√25.OCS系统的AIN模板中,CHNL是指该回路输入地址的通道号?√26.OCS系统中的环境就是系统对现场回路进行控制所用的硬件背景?×27.OCS系统中环境之下分为区,区是将装置中所有物理位置相近的一些回路组态在一个区下面以方便组态和查询?√28.OCS系统中,区下面分为组,一个组最多能组态12个控制回路,36个测量回路?√29.OCS系统中,一个组中有可能既包括测量回路也包括控制回路?30.OCS系统中双环网上的节点的名字可以重复?问答题1.登陆死机的操作站,重启操作站的步骤?>rlogin 138.222.193.* (这里的*代表死机的操作站的DCN代码) >su root>root>cd /etc>shutdown –r 02.ES/OS的下电步骤?在操作界面下按CTRL+D键出现命令输入行?在命令提示行内输入POWEROFF?弹出HP-TERM终端,输入密码?过几分钟后,系统会提示你可以安全的关机了?之后,你可以关闭操作站?打印机?显示器的电源?3.在工程师站上查询操作员操作信息的方法:进入工程师站的ENVIR环境的工程师属性;打开HPterm窗口,并登陆历史站,命令rlogin 138.222.193.3(或5);键入命令:export DISPLAY=138.222.193.11:0.0;键入命令:find / -name StartOperatorMsg;执行查找到的StartOperatorMsg执行文件,打开操作信息窗口;按照在历史站上的步骤,查询需要的信息;聚丙烯JX-300X系统题库选择题:1.SUPCON JX-300X DCS由----D-----组成?A.工程师站?操作站B.操作站?控制站C?工程师站?控制站?过程控制网络D.工程师站?操作站?控制站?过程控制网络2.SUPCON JX-300X DCS控制站主要由---D------组成?A.机柜?机笼B.机笼?供电单元和各类卡件C?机柜?供电单元和各类卡件 D.机柜?机笼?供电单元和各类卡件.3 SUPCON JX-300X DCS主控制卡的切换模式可分为--B------..A. 失电强制切换 B. 失电强制切换 ,干扰随机切换和故障自动切换C. 失电强制切换和干扰随机切换D.. 干扰随机切换和故障自动切换4我公司SUPCON JX-300X DCS系统现在有-----B-----组冗余的控制器.A .2 B. 3 C.1 D. 45 我公司SUPCON JX-300X DCS系统现在有-----C----台操作站.A.1B. 2C. 3D. 46 我公司SUPCON JX-300X DCS的运行环境是----A------A. WINDOWSB. LINUXC. UNIXD. DOS7 我公司SUPCON JX-300X DCS网络互联设备是---A--------A. 集线器B. 交换机C. 路由器D. MODEM8 SUPCON JX-300X DCS软件启动后,总体信息菜单包括---C--------菜单项?A.主机设置?编译?备份数据 B?编译?备份数据?组态下载C.主机设置?编译?备份数据?组态下载?组态传送D.编译?备份数据?组态下载?组态传送9 SUPCON JX-300X DCS软件启动后,控制站菜单包括-----D----菜单项?A.自定义控制方案?折线表定义 B?自定义变量?常规控制方案C.I/O组态?自定义变量?常规控制方案?自定义控制方案D.I/O组态?自定义变量?常规控制方案?自定义控制方案?折线表定义10 SUPCON JX-300X DCS软件启动后,操作站菜单包括---A-------菜单项?A.操作小组设置?总貌画面设置?趋势画面设置?分组画面设置?一览画面设置?流程图登录?报表登录?自定义键?语音报警B.操作小组设置?总貌画面设置?趋势画面设置?分组画面设置?一览画面设置C.分组画面设置?一览画面设置?流程图登录?报表登录?自定义键?语音报警D.趋势画面设置?分组画面设置?一览画面设置?流程图登录?报表登录?自定义键11 DCS综合了----B------等先进技术?A. 计算机技术?通讯网络技术?自动控制技术B. 计算机技术?通讯网络技术?自动控制技术?冗余及自诊断技术C. 通讯网络技术?自动控制技术?冗余及自诊断技术D. 计算机技术?通讯网络技术?冗余及自诊断技术12. SUPCON JX-300X DCS系统中AI是---------,AO是--------,DI是---------,DO是-------A. 数字量输出卡件B. 模拟量输出卡件。
自动化考题(操作人员)试题及答案

自动化系统考试题(操作人员)一、填空题1、分输站的站控SCADA系统主要由 OASYS工作站、AB公司的 PLC(可编程逻辑控制器)系统以及现场智能仪表组成。
2、OASYS系统中阀门的状态在屏幕图上红色表示全关、绿色表示全开、黄色表示中间状态、白色表示故障状态。
3、各分输站操作台上的ESD紧急操作按钮的作用是对本站执行ESD(紧急停车)操作。
4、分输调节阀的调节包括手动设定开度和自动PID调节,其中自动调节分为分输流量调节和阀后压力保护调节。
5、站控OASYS系统主要由CMX、XIS、XOS组成,其中CMX为实时服务器、XIS为历史服务器、XOS人机界面(用户界面)。
6、在OASYS系统工作站屏幕图上, PT表示远传压力、FT表示远传流量、TE表示远传温度、PSHH表示压力高高开关。
7、各分输站操作台上的ESD紧急操作按钮的作用是对本站执行ESD(紧急停车)操作。
8、各站场的电动阀门可以有三种操作方式:中心远程操作、站场远程操作、就地操作。
9、在就地手动开关阀门的过程中,将阀门的操作开关打到“stop(停止)”就可以使阀门停止在某一开度上。
10、站场自动化系统工作站上的报警信息用三种颜色表示三种级别:红色表示重要或紧急报警,黄色表示次重要报警,绿色表示一般报警或一般事件。
11、在各站控制流程图上,模拟量数据例如压力、温度等的显示如果是黑色的背景绿色的字体并且不断变化,则表示该数据正常;如果是绿色的背景黑色的数字则表示该数据不正常。
12、全线SCADA系统由15个站控系统、15个自控阀室RTU系统、3个高点RTU系统、成都控制中心(廊坊控制中心)及通信系统组成。
13、站控自动化系统的用户界面(XOS)由工具栏、控制流程图、报警栏、系统信息栏组成。
14、站控工作站的操作系统为WINDOWS2000。
15、站控工作站上系统信息栏中的CMX/XIS服务器状态由颜色区分,绿色表示正在运行,红色表示故障或退出运行。
自动控制工程师招聘笔试题及解答

招聘自动控制工程师笔试题及解答(答案在后面)一、单项选择题(本大题有10小题,每小题2分,共20分)1、以下哪个不是PLC(可编程逻辑控制器)的基本组成部分?A、输入模块B、输出模块C、中央处理单元D、电源模块E、通信模块2、在PID(比例-积分-微分)控制中,以下哪个参数是用来调整系统对干扰的抑制能力?A、比例增益(Kp)B、积分时间(Ti)C、微分时间(Td)D、阻尼系数3、题干:在PLC编程中,以下哪个是继电器逻辑编程(RLC)的代表符号?A、梯形图(Ladder Diagram,LD)B、功能块图(Function Block Diagram,FBD)C、指令列表(Instruction List,IL)D、结构化文本(Structured Text,ST)4、题干:下列哪个不是现场总线通信的特点?A、高速传输B、抗干扰能力强C、易于扩展D、低成本5、以下哪个系统不属于自动控制系统的基本组成部分?A、控制器B、执行器C、被控对象D、传感器E、计算机6、在PID控制中,以下哪个参数是用来调整系统的响应速度的?A、比例增益KpB、积分时间TiC、微分时间TdD、积分增益Ki7、题干:在PLC编程中,以下哪个指令用于实现定时器的复位功能?A. SETB. RSTC. LBLD. JMP8、题干:以下哪种传感器属于模拟传感器?A. 光电传感器B. 红外传感器C. 温度传感器D. 液位传感器9、以下哪种传感器不属于模拟传感器?A. 电阻应变片B. 霍尔效应传感器C. 光电传感器D. 电流互感器二、多项选择题(本大题有10小题,每小题4分,共40分)1、以下哪些是自动控制系统中常用的反馈控制策略?()A、比例控制(P)B、积分控制(I)C、微分控制(D)D、比例积分微分控制(PID)E、前馈控制2、以下哪些属于自动控制系统的性能指标?()A、稳定性B、快速性C、准确性D、鲁棒性E、节能性3、以下哪些是自动控制系统中常用的反馈类型?()A、正反馈B、负反馈C、开环反馈D、闭环反馈4、以下哪些是PID控制器的组成部分?()A、比例(P)控制器B、积分(I)控制器C、微分(D)控制器D、比例-积分-微分(PID)控制器5、以下哪些属于自动控制系统的基本类型?()A、比例控制B、积分控制C、微分控制D、PID控制6、以下关于控制器性能指标的描述,正确的是()A、比例增益越大,系统稳定性越差B、积分时间越短,系统动态响应越快C、微分时间越短,系统稳定性越差D、控制器带宽越宽,系统响应速度越快7、以下哪些属于PLC(可编程逻辑控制器)的输入模块类型?A. 数字输入模块B. 模拟输入模块C. 混合输入模块D. 输出模块8、在自动控制系统中,以下哪些因素会影响PID(比例-积分-微分)控制器的参数整定?A. 过程的特性(如纯滞后、非线性行为)B. 控制系统的稳定性C. 控制对象的响应速度D. 控制系统的执行器特性9、以下哪些是常见的工业自动化控制系统?()A、PLC控制系统B、DCS控制系统C、HMI控制系统D、MES系统E、ERP系统三、判断题(本大题有10小题,每小题2分,共20分)1、自动控制系统的稳定性分析主要依赖于奈奎斯特稳定判据。
自动控制19套试题及答案详解.
(5)幅值裕量是指_____________________________________________________
________________________________________________________________。
1.当扰动信号进入系统破坏系统平衡时,有重新恢复平衡的能力则该系统具有。
2.控制方式由改变输入直接控制输出,而输出对系统的控制过程没有直接影响,
叫。
3.线性系统在零初始条件下输出量与输入量的之比,称该系统的传递函数。
4.积分环节的传递函数为。
5.单位斜坡函数信号的拉氏变换式。
6.系统速度误差系数Kv=。
一.填空题(40分)
(1)控制系统的基本要求是_____________、_____________、_____________。
(2)脉冲传递函数是___________________________________________________
________________________________________________________________。
________________________________________________________________。
(2)传递函数是指_____________________________________________________
________________________________________________________________。
自动化考试试题(含答案)

自动化考试试题(含答案)单选题1.下列哪项不属于自动化控制系统垂直结构中的元素?A. 传感器B. 控制器C. 执行器D. 电路板答案:D2.下列哪种传感器可以感受光线强弱?A. 磁敏电感传感器B. 光敏电阻传感器C. 压力传感器D. 声波传感器答案:B3.某自动化控制系统中,输入信号采用0-5V模拟量信号,现在需要把信号转换为数字量信号,下列哪种元器件可以完成这个功能?A. PLDB. CPLDC. FPGAD. ADC答案:D4.以下哪种传感器不适合检测温度?A. 热电偶传感器B. 热敏电阻传感器C. 压力传感器D. 红外线测温传感器答案:C5.自动化系统中,如果需要按需开启或关闭某些设备,下列哪种元器件可以完成这个功能?A. 开关B. 电压稳压器C. 中继器D. 光耦答案:A多选题1.下列哪些元器件可以实现自动化系统中信号的逐级放大?A. 运放B. 三极管C. 操作放大器D. 电感E. 电容答案:A、B、C2.下列哪些元器件可以实现数字信号的逻辑运算?A. 与门B. 或门C. 非门D. 与非门E. 异或门答案:A、B、C、D、E3.下列哪些方法可以实现自动化控制系统的信息反馈?A. 亮度显示B. 声音提示C. 震动提示D. LED灯E. 显微镜答案:A、B、C、D判断题1.自动化系统涉及到硬件和软件,只有硬件和软件都充分发展才能有完整的自动化产品。
答案:对2.传感器用来感受被测量物理量,并将其转换为电信号输出。
答案:对3.控制器用来配合执行器对被控对象进行控制。
答案:对4.FPGA可以根据需要进行现场配置和修改电路结构。
答案:对5.自动化控制系统中,传感器的作用是将控制系统的信号转换为控制器可以处理的电信号。
答案:错,应为将被测量信号转换为控制系统的电信号。
简答题1.自动化控制系统中,控制器的结构主要有哪几种类型?答:控制器的结构分为两种,一种是单机结构,将控制算法全部放在一个控制器内部完成;另一种是分布式结构,将控制算法按照功能分配在多个控制器中完成。
自动控制原理考试试卷及答案30套

自动控制原理试卷A(1)2. (10分)已知某系统初始条件为零,其单位阶跃响应为)0(8.08.11)(94≥+-=--t e e t h t t ,试求系统的传递函数及单位脉冲响应。
3.(12分)当ω从0到+∞变化时的系统开环频率特性()()ωωj j H G 如题4图所示。
K 表示开环增益。
P 表示开环系统极点在右半平面上的数目。
v 表示系统含有的积分环节的个数。
试确定闭环系统稳定的K 值的范围。
4.(12分)已知系统结构图如下,试求系统的传递函数)(,)(s E s C0,3==p v (a )0,0==p v (b ) 2,0==p v (c ) 题4图 题2图6.(15分)某最小相位系统用串联校正,校正前后对数幅频特性渐近线分别如图中曲线(1)、(2)所示,试求校正前后和校正装置的传递函数)(),(),(21s G s G s G c ,并指出Gc (S )是什么类型的校正。
8.(12分)非线性系统线性部分的开环频率特性曲线与非线性元件负倒数描述曲线如下图所示,试判断系统稳定性,并指出)(1x N和G (j ω)的交点是否为自振点。
自动控制原理试卷A (2)1.(10分)已知某单位负反馈系统的开环传递函数为)5(4)(+=S S s G ,求该系统的单位脉冲响应和单位阶跃响应。
2.(10分)设单位负反馈系统的开环传递函数为)0()(3>=K SKs G ,若选定奈氏路径如图(a )(b )所示,试分别画出系统与图(a )和图(b )所对应的奈氏曲线,并根据所对应的奈氏曲线分析系统的稳定性。
3.(10分)系统闭环传递函数为2222)(nn n s s G ωξωω++=,若要使系统在欠阻尼情况下的单位阶跃响应的超调量小于16.3%,调节时间小于6s ,峰值时间小于6.28s ,试在S 平面上绘出满足要求的闭环极点可能位于的区域。
(8分) 4.(10分)试回答下列问题: (1) 串联超前校正为什么可以改善系统的暂态性能? (2) 从抑制扰动对系统的影响这一角度考虑,最好采用哪种校正方式? 5.(15分)对单位负反馈系统进行串联校正,校正前开环传递函数)12()(2++=S S S Ks G ,试绘制K 由0→+∞变化的根轨迹。
自动化控制系统考核试卷

D.系统稳定性只与闭环零点有关
16.以下哪种控制方法适用于非线性系统?()
A.线性控制
B.非线性控制
C.模糊控制
D. A和B
17.在自动化控制系统中,以下哪个环节可能导致系统产生振荡?()
A.控制器增益过大
B.控制器增益过小
C.被控对象时间常数过大
D.被控对象时间常数过小
标准答案
一、单项选择题
1. D
2. D
3. A
4. A
5. D
6. A
7. D
8. A
9. D
10. C
11. B
12. A
13. C
14. A
15. B
16. D
17. A
18. A
19. D
20. B
二、多选题
1. ABD
2. ABC
3. ABC
4. BD
5. AB
6. ABCD
7. AB
8. ABC
A.比例控制
系统中,反馈信号的作用是?()
A.增强系统的稳定性
B.减弱系统的稳定性
C.提高系统的响应速度
D.降低系统的响应速度
4.以下哪种控制策略是无差控制的?()
A. P控制
B. PI控制
C. PD控制
D. PID控制
5.自动控制系统设计的主要目标是?()
A.提高控制器增益
B.降低控制器增益
C.使用低通滤波器
D.使用高通滤波器
11.以下哪种控制策略适用于滞后系统?()
A. P控制
B. PI控制
C. PD控制
D. PID控制
12.在控制系统中,系统稳态误差是指?()
自动控制工程师招聘笔试题及解答(某大型国企)

招聘自动控制工程师笔试题及解答(某大型国企)一、单项选择题(本大题有10小题,每小题2分,共20分)1、在自动控制系统中,用来测量被控量的实际值,并将其转换为特定信号形式反馈给比较器的是哪个元件?A. 放大器B. 执行机构C. 测量与变送装置D. 比较器答案:C. 测量与变送装置解析:在一个典型的闭环控制系统中,测量与变送装置负责检测被控对象的状态,并将此状态转化为可处理的信号(如电信号),再传递给控制器,使得控制器能够根据实际状态与期望状态之间的偏差调整其输出。
2、PID控制器中的P代表什么?A. 预测(Prediction)B. 比例(Proportional)C. 峰值(Peak)D. 相位(Phase)答案:B. 比例(Proportional)解析: PID控制器是一种常用的反馈控制器,其中P代表比例项,它直接与误差大小成正比地调节系统输出。
比例项能够对系统的即时偏差做出反应,有助于快速减少偏差。
3、题干:在PLC编程中,以下哪个指令用于实现定时器功能?A. MOVB. SETC. TOND. OUT答案:C 解析:在PLC(可编程逻辑控制器)编程中,TON是定时器指令,用于创建一个定时器,当定时器启动时开始计时,当达到预设的时间后,定时器输出变为激活状态。
MOV是移动指令,用于复制数据;SET是置位指令,用于将一个位设置为1;OUT是输出指令,用于向输出设备发送信号。
因此,正确答案是C。
4、题干:在PID控制系统中,以下哪个参数用于调整系统对输入变化的响应速度?A. Proportional(比例)B. Integral(积分)C. Derivative(微分)D. Setpoint(设定点)答案:C 解析:在PID控制系统中,Derivative(微分)参数用于调整系统对输入变化的响应速度。
微分作用可以预测未来的变化趋势,并据此提前调整控制作用,从而减少超调和振荡。
Proportional(比例)参数调整系统对当前误差的响应;Integral (积分)参数调整系统对累积误差的响应;Setpoint(设定点)是控制系统的目标值,不是用于调整响应速度的参数。
自动控制技术考试
自动控制技术:选择题1. 工业控制中常用PID 控制,这里的 P 指(A)。
A 比例B 比例度C 积分时间D 微分时间2. 工业控制中常用PID控制,这里的 I 指(B)。
A 比例系数B 积分C 微分D 积分时间3. 工业控制中常用PID 控制,这里的 D 指(C)。
A 比例系数B 积分C 微分D 积分时间4. 在计算机控制系统里,通常当采样周期T 增大时,系统的稳定性将(B)。
A 变好B 变坏C 不受影响D 不确定5、控制阀的流量随着开度的增大迅速上升,很快地接近最大值的是(C)。
A、直线流量特性B、等百分比流量特性C、快开流量特性D、抛物线流量特性6、控制器的反作用是指(D)。
A.测量值大于给定值时,输出增大 B.给定值增大,输出减小C.测量值增大,输出增大 D. 测量值增大,输出减小7、在自控系统中,确定控制器、控制阀、被控对象的正、反作用方向必须按步骤进行,其先后排列次序为(D)。
A、控制器、控制阀、被控对象B、控制阀、被控对象、控制器C、被控对象、控制器、控制阀D、被控对象、控制阀、控制器8、控制系统中控制器正.反的确定依据是(B)A、实现闭环回路的正反馈B、实现闭环回路的负反馈C、系统放大系数恰到好处D、生产的安全性9、DDZ-Ⅲ控制器(C)的切换为有扰动的切换。
A、从"硬手动"向"软手动";B、从"硬手动"向"自动";C、从"自动"向"硬手动";D、从"自动''向"软手动"。
10、下列不正确的说法是(D)。
A、控制器是控制系统的核心部件;B、控制器是根据设定值和测量值的偏差进行PID、运算的;C、控制器设有自动和手动控制功能;D、数字控制器可以接收4~20mA、电流输入信号。
11、控制器的比例度和积分时间正确说法是(B)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
江森自控笔试真题
一、英语
1.单选10 题,全部都是语法的,倒装,时态,句子倒是很简单,但是我语法太差了,随便选选,开始下一题。
2.完形填空1 题,题目是关于钱币的形式历史,很简单。
3.阅读理解1 题,题目是一个女客户打电话询问电脑维修,超简单。
二、逻辑推理
1.23,29,(),37,41
a、35
b、33
c、31
d、32
2.113、202、222、400、()
a、440
b、416
c、522
d、479
三、专业知识
1.选择
哪种传送带最快,平带,窄带,v 带,?
2.判断
(1)凸轮机构,基圆半径越大,压力角越大,传动效率越高。
(2)q235,35,45 均为优质碳素钢。
(3)含碳量2%以上的是铁,以下的是钢。
(4)四杆机构中,取最大长杆做机架,则可得双摇杆机构。
(5)机构的自由度就是构件的自由度。
(6)零件是机械的最小单元。
(7)螺纹就可起连接的作用,也可起传动的作用。
(8)传动带打滑可以保护机器受损。
3.问答
(1)焊接按物理化学的分类:熔化焊,固相焊接(压力焊),钎焊。
(2)焊接的原理?。